Estimation of Acoustic Power Output from Electrical Impedance Measurements


Abstract
1. Introduction
1.1. Motivation and Overview of Current Methods
1.2. Equivalent Circuit Models for Transducers with Reference to the Current Work
2. Theory
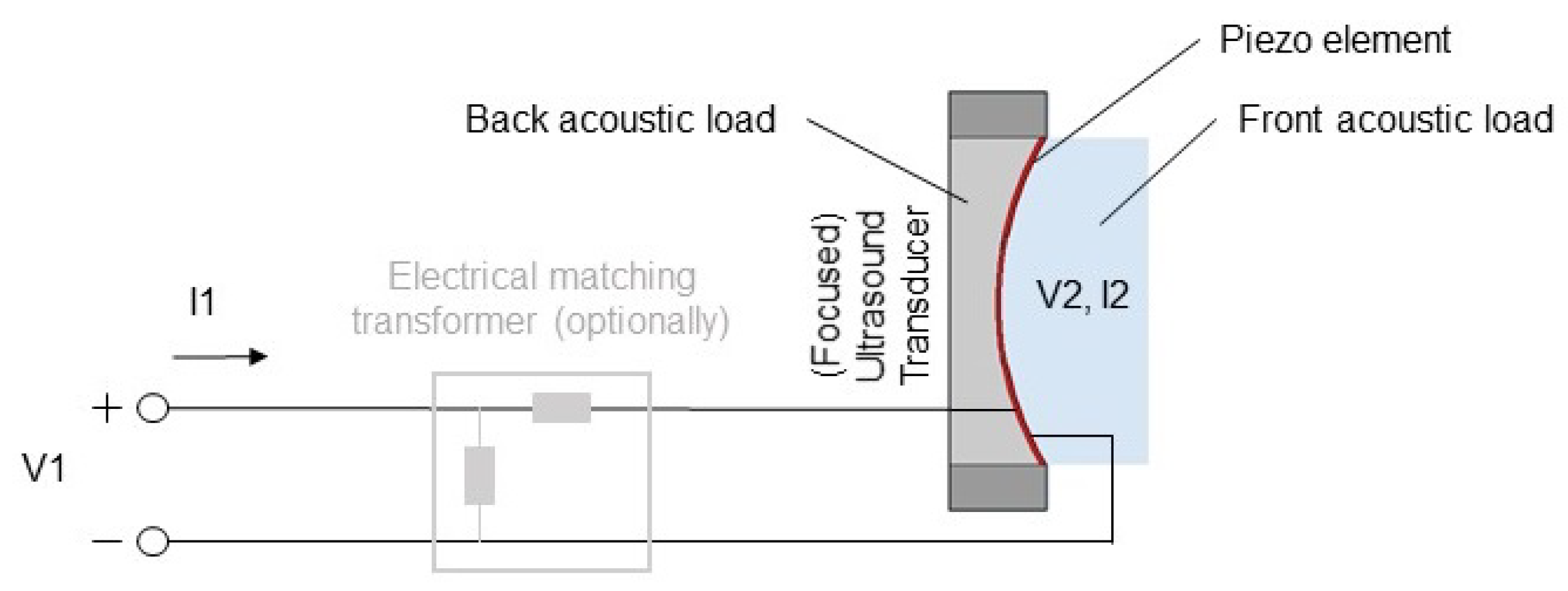
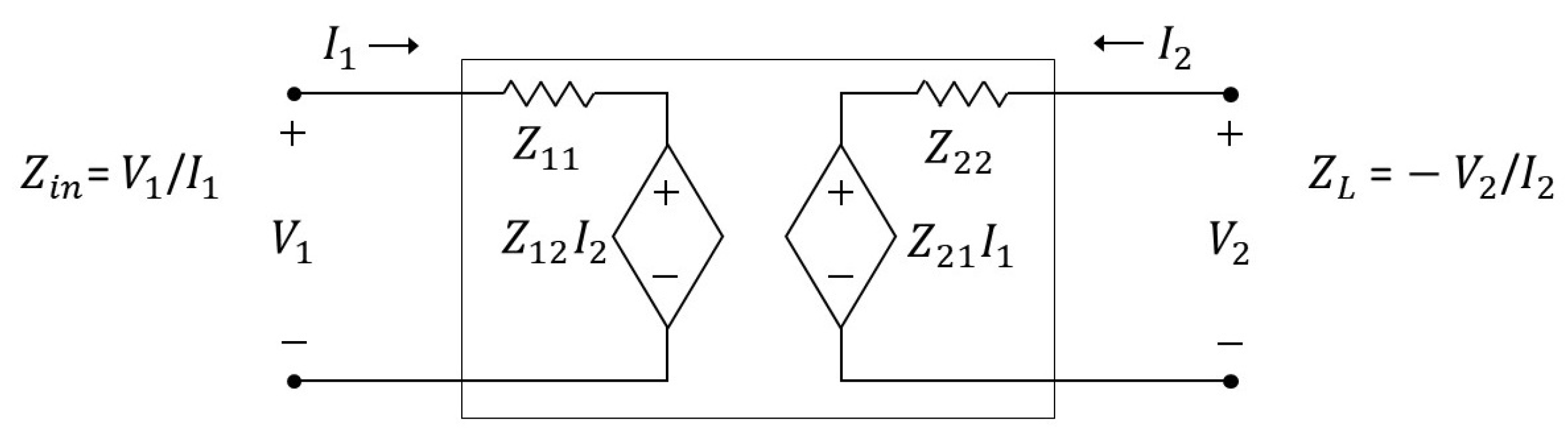
2.1. Two-Port Transducer Model
2.2. Estimation of Two-Port Parameters and Power
3. Materials and Methods
3.1. Transducers Used for the Measurements
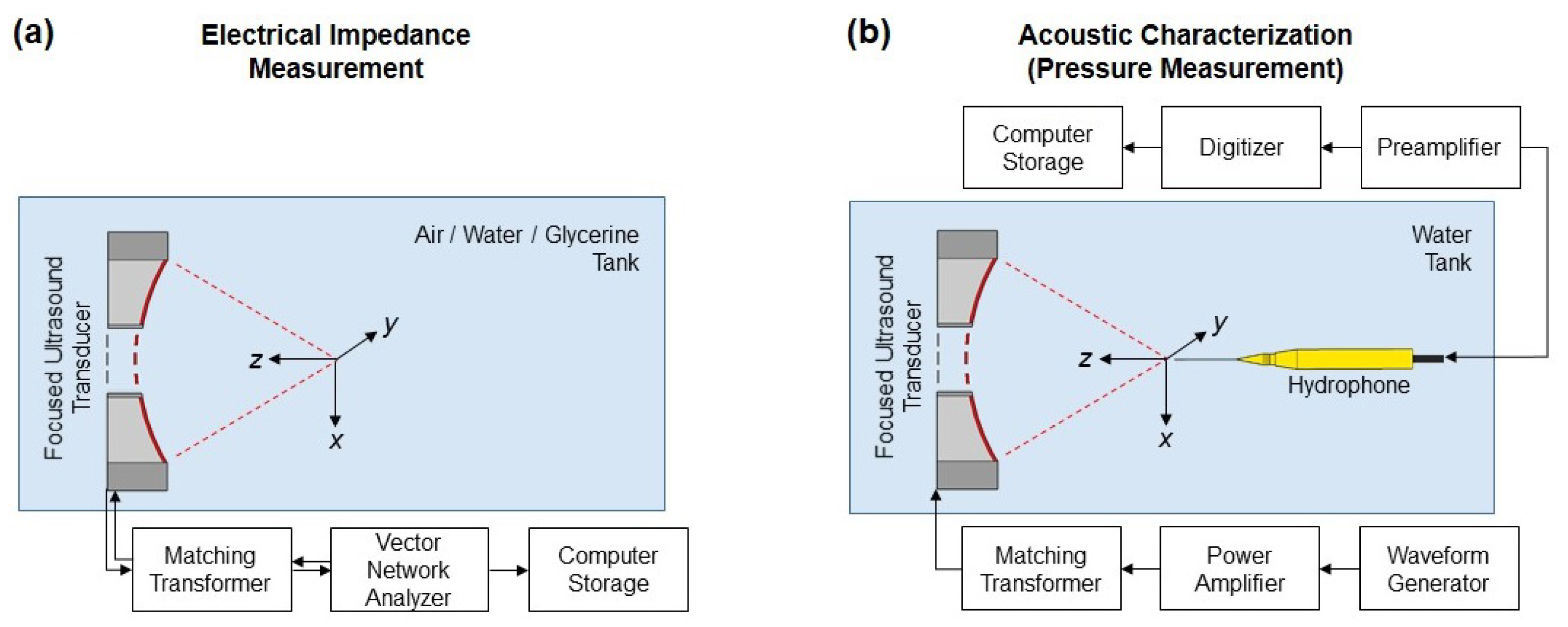
3.2. Electrical Impedance Measurements
3.3. Acoustic Characterization
3.4. Measurements Validating the Range of Linearity for the Model
4. Results
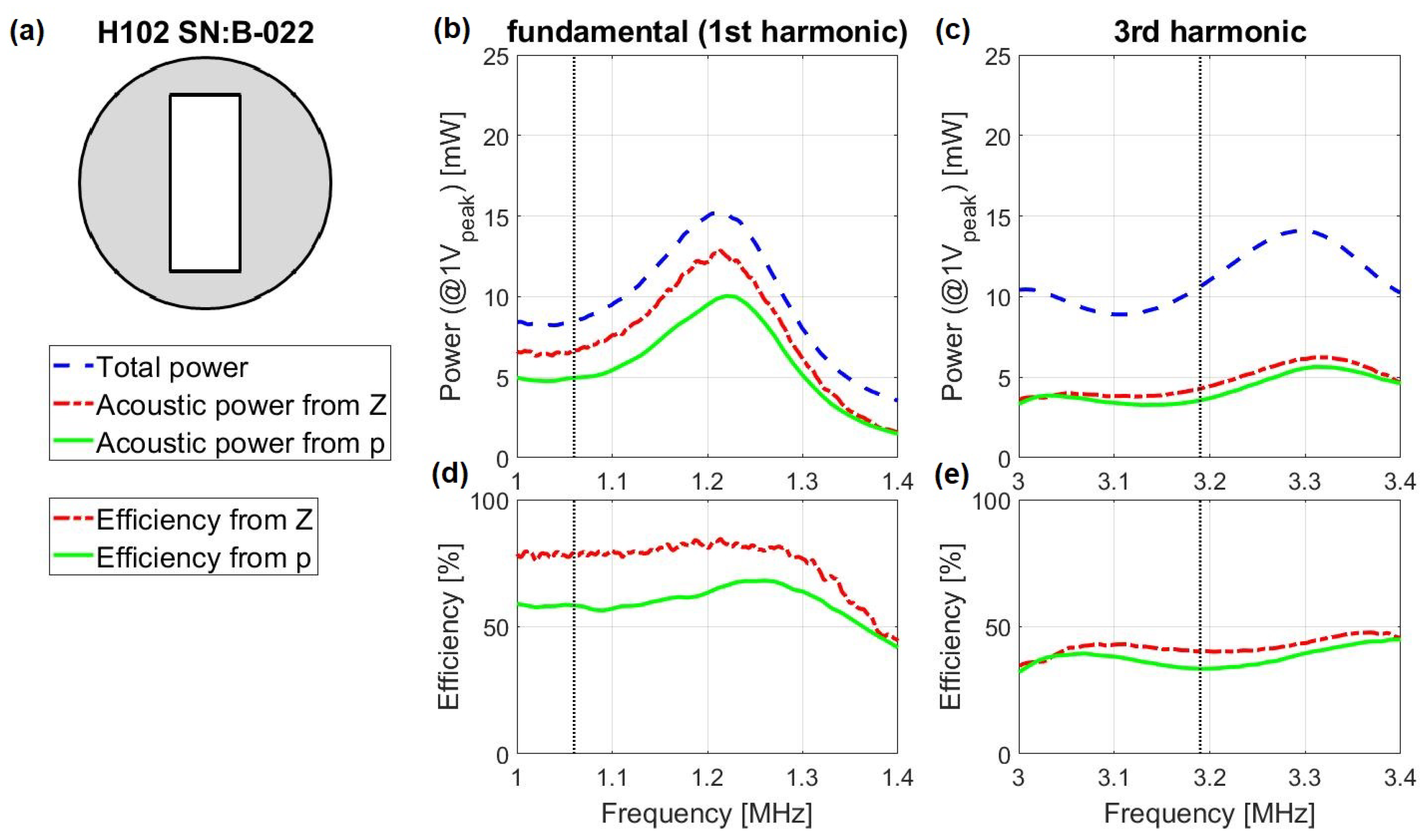
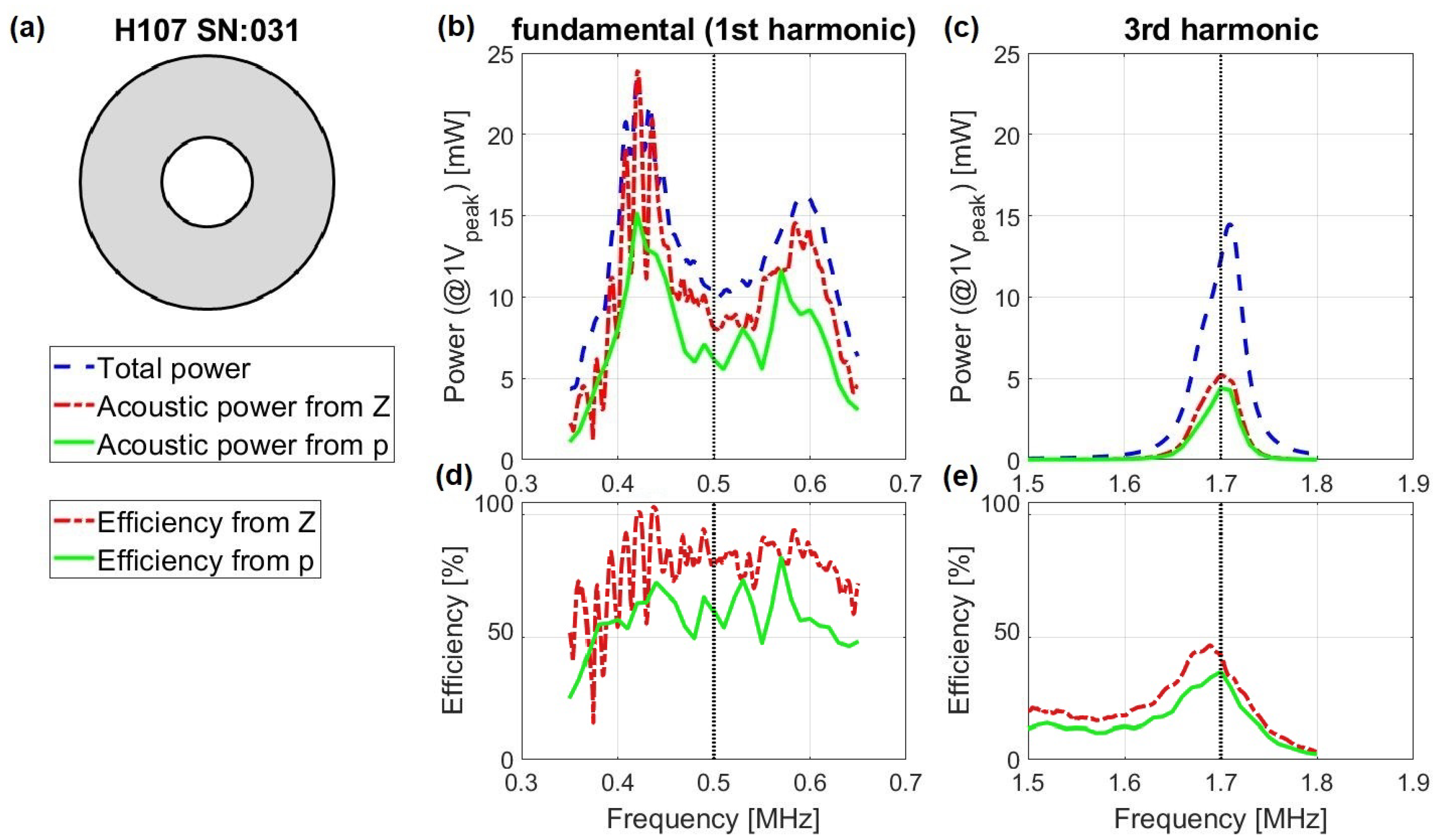
4.1. Comparison of Estimated and Measured Acoustic Powers
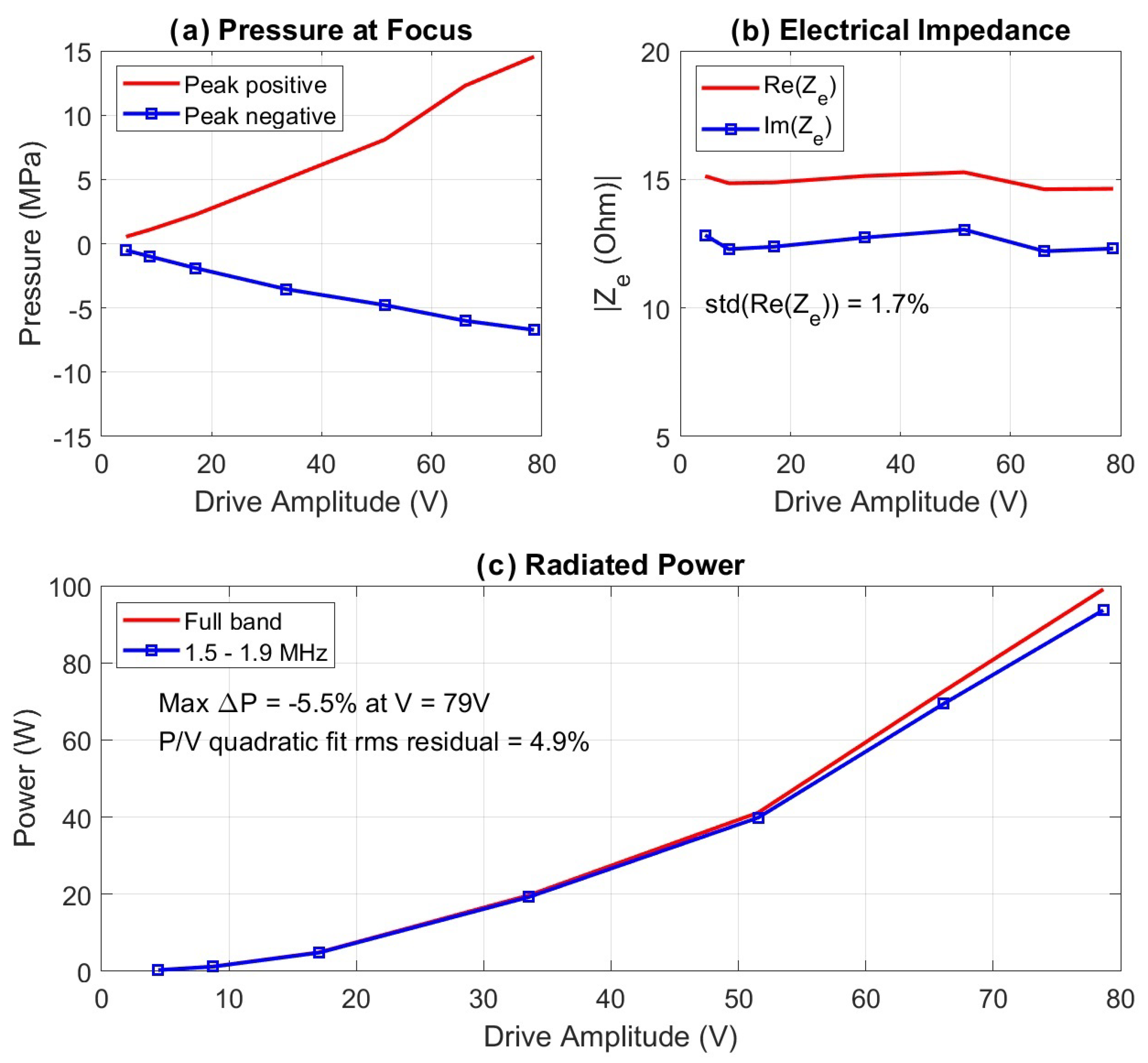
4.2. Linearity of the Model
5. Discussion
5.1. Interpretation of Transducer-Specific Phenomena Affecting Measurements
5.2. Scaling of the Results
5.3. Potential Advantages of the Proposed Method
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| HIFU | High-intensity focused ultrasound |
| KLM model | Equivalent circuit model of piezoelectric ultrasound transducers, named after R. Krimholtz, D. A. Leedom and G. L. Matthaei |
Appendix A. Derivation of Equation (6) from Equations (1) and (2)
Appendix B. Calculation of the Two-Port Network Parameters
Appendix C. The Validity of Short-Pulse Measurements for HIFU Transducers

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drive Band (MHz) | Pulse Lengths (cycles) | Transfer Function Ratio, 200 kHz Band | Transfer Function Ratio, at Centre Frequency |
|---|---|---|---|
| “Fundamental” | 2, 12 | 0.994: 0.4–0.6 MHz | 0.998: 0.50 MHz |
| “3rd Harmonic” | 2, 40 | 0.997: 1.6–1.8 MHz | 0.997: 1.70 MHz |
Appendix D. Scaling of the H-107 Acoustic Measurements after Repetition
Appendix E. Uncertainty Estimation of the Impedance Measurement-Based Method
References
- Shaw, A.; Martin, K. The acoustic output of diagnostic ultrasound scanners. In The Safe Use of Ultrasound in Medical Diagnosis, 3rd ed.; ter Haar, G., Ed.; The British Institute of Radiology: London, UK, 2012; pp. 18–45. [Google Scholar]
- Civale, J.; Rivens, I.; Shaw, A.; ter Haar, G. Focused ultrasound transducer spatial peak intensity estimation: A comparison of methods. Phys. Med. Biol. 2018, 63, 055015. [Google Scholar] [CrossRef] [PubMed]
- Preston, R.C. Output Measurements for Medical Ultrasound; Preston, R.C., Ed.; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Johansen, T.F.; Rommetveit, T. Characterization of ultrasound transducers. In Proceedings of the 33rd Scandinavian Symposium on Physical Acoustics, Geilo, Norway, 9 February 2010. [Google Scholar]
- San Emeterio, J.L.; Ramos, A. Models for piezoelectric transducers used in broadband ultrasonic applications. In Piezoelectric Transducers and Applications, 2nd ed.; Arnau, A., Ed.; Springer: Berlin, Germany, 2009; pp. 97–116. [Google Scholar]
- Krimholtz, R.; Leedom, D.A.; Matthaei, G.L. New equivalent circuits for elementary piezoelectric transducers. Electron. Lett. 1970, 6, 398–399. [Google Scholar] [CrossRef]
- Van Kervel, S.; Thijssen, J. A calculation scheme for the optimum design of ultrasonic transducers. Ultrasonics 1983, 21, 134–140. [Google Scholar] [CrossRef]
- Annamdas, V.G.M.; Soh, C.K. Application of electromechanical impedance technique for engineering structures: Review and future issues. J. Intell. Mater. Syst. Struct. 2010, 21, 41–59. [Google Scholar] [CrossRef]
- Rathod, V.T. A review of electric impedance matching techniques for piezoelectric sensors, actuators and transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef]
- Ndiaye, E.B.; Duflo, H.; Maréchal, P.; Pareige, P. Thermal aging characterization of composite plates and honeycomb sandwiches by electromechanical measurement. J. Acoust. Soc. Am. 2017, 142, 3691–3702. [Google Scholar] [CrossRef]
- Hayt, W.H.; Kemmerly, J.E.; Durbin, S.M. Engineering Circuit Analysis; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- Sedra, A.S.; Smith, K.C. Microelectronic Circuits; Oxford University Press: New York, NY, USA, 1998. [Google Scholar]
- Yang, W.Y.; Lee, S.C. Circuit Systems with MATLAB and PSpice; John Wiley & Sons: Hoboken, NJ, USA, 2008; Chapter 10. [Google Scholar]
- Selfridge, A.R. Approximate material properties in isotropic materials. IEEE Trans. Son. Ultrason. 1985, 32, 381–394. [Google Scholar] [CrossRef]
- Marczak, W. Water as a standard in the measurements of speed of sound in liquids. J. Acoust. Soc. Am. 1997, 102, 2776–2779. [Google Scholar] [CrossRef]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Csány, G.; Gray, M.D.; Gyöngy, M. Estimation of Acoustic Power Output from Electrical Impedance Measurements. Acoustics 2020, 2, 37-50. https://doi.org/10.3390/acoustics2010004
Csány G, Gray MD, Gyöngy M. Estimation of Acoustic Power Output from Electrical Impedance Measurements. Acoustics. 2020; 2(1):37-50. https://doi.org/10.3390/acoustics2010004
Chicago/Turabian StyleCsány, Gergely, Michael D. Gray, and Miklós Gyöngy. 2020. "Estimation of Acoustic Power Output from Electrical Impedance Measurements" Acoustics 2, no. 1: 37-50. https://doi.org/10.3390/acoustics2010004
APA StyleCsány, G., Gray, M. D., & Gyöngy, M. (2020). Estimation of Acoustic Power Output from Electrical Impedance Measurements. Acoustics, 2(1), 37-50. https://doi.org/10.3390/acoustics2010004