
Unfolding WWII Heritages with Airborne and Ground-Based Laser Scanning

 ,
,
Abstract
:1. Introduction
2. Literature Review
2.1. LiDAR
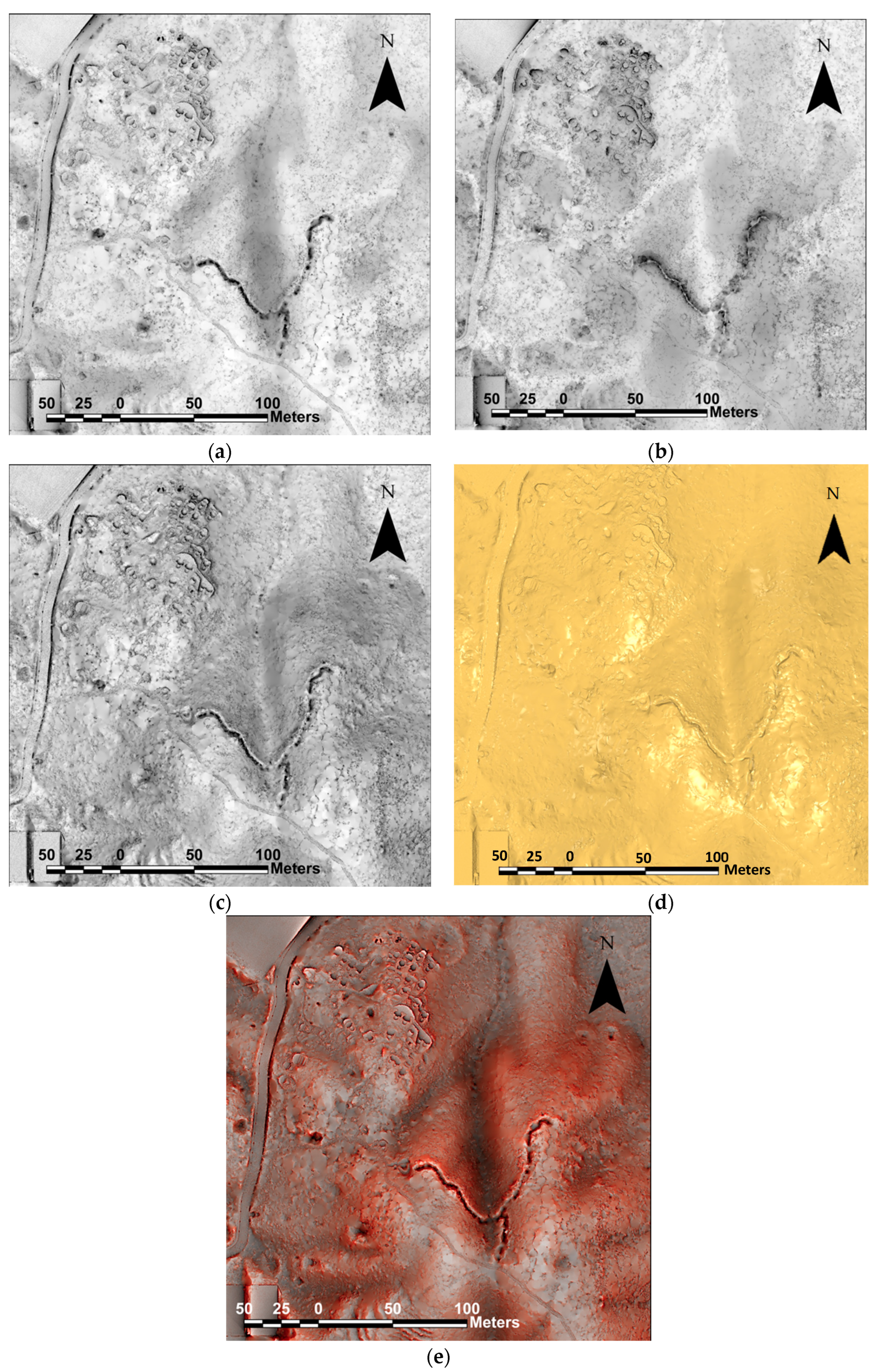
2.2. Visualisation Methods and GIS in Tier 2 (Airborne LiDAR)
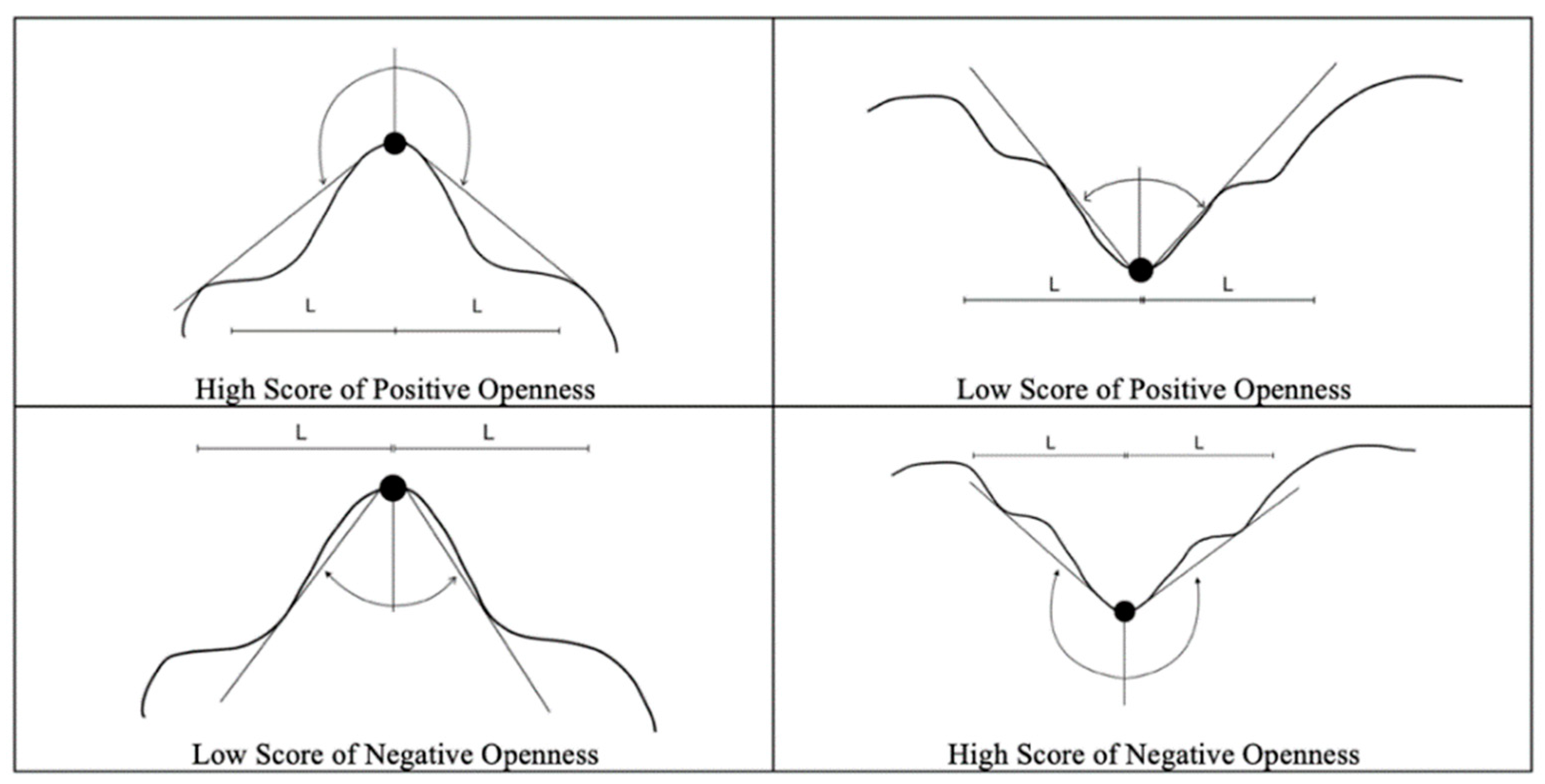
2.2.1. Positive Topographic Openness and Negative Topographic Openness
2.2.2. Sky-View Factor
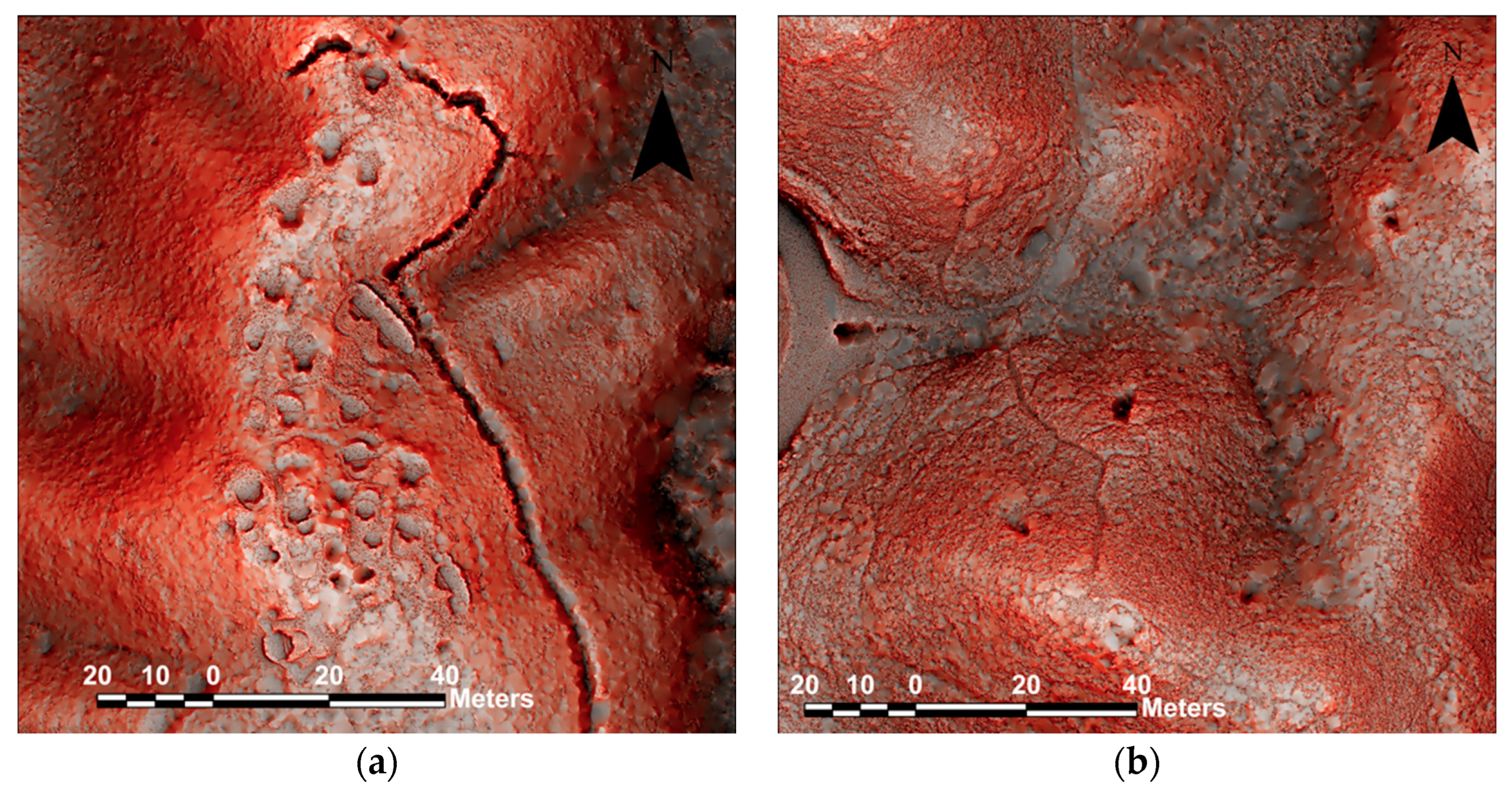
2.2.3. Red Relief Image Map
3. Methodology
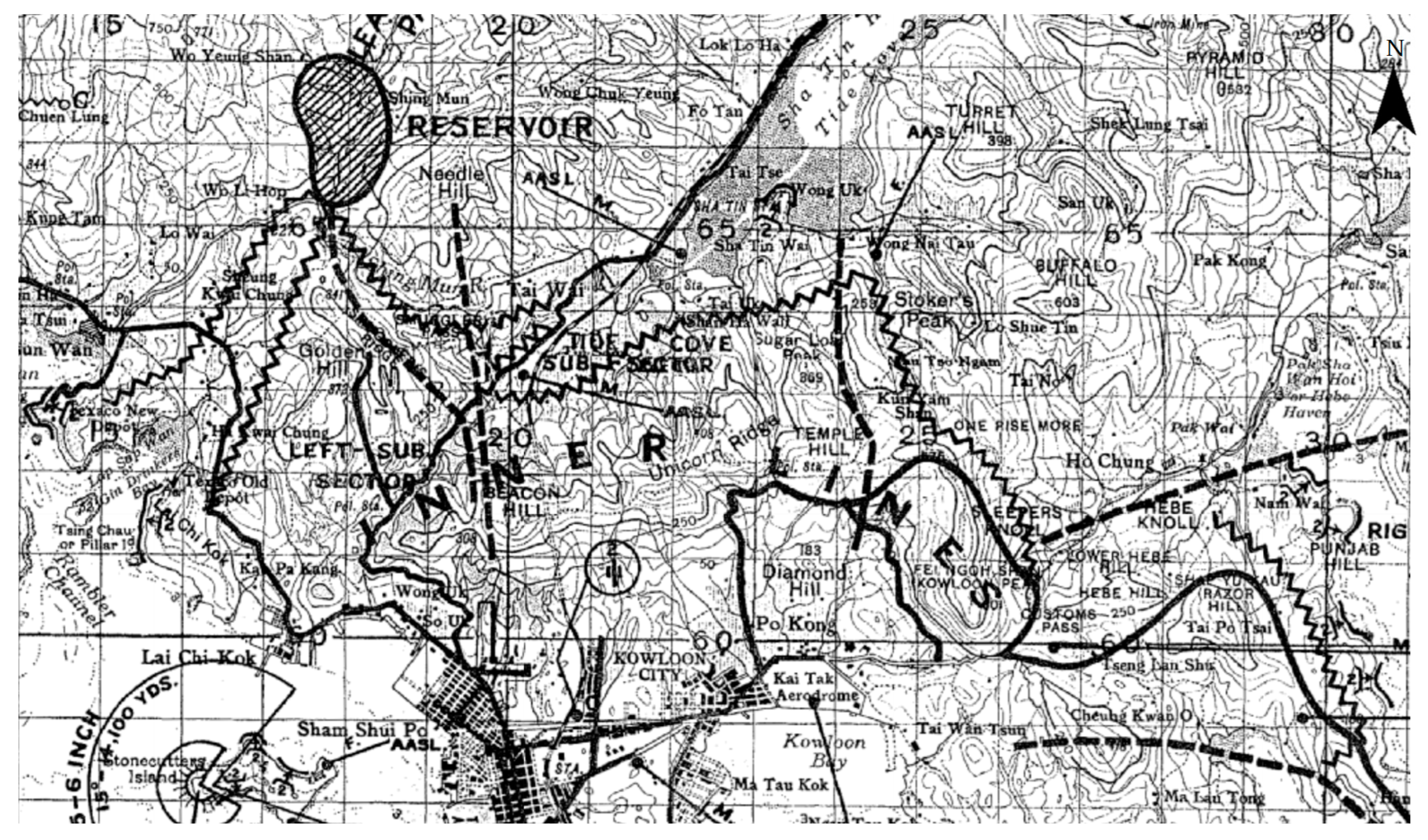
3.1. Tier 1—Desktop Searching the Past
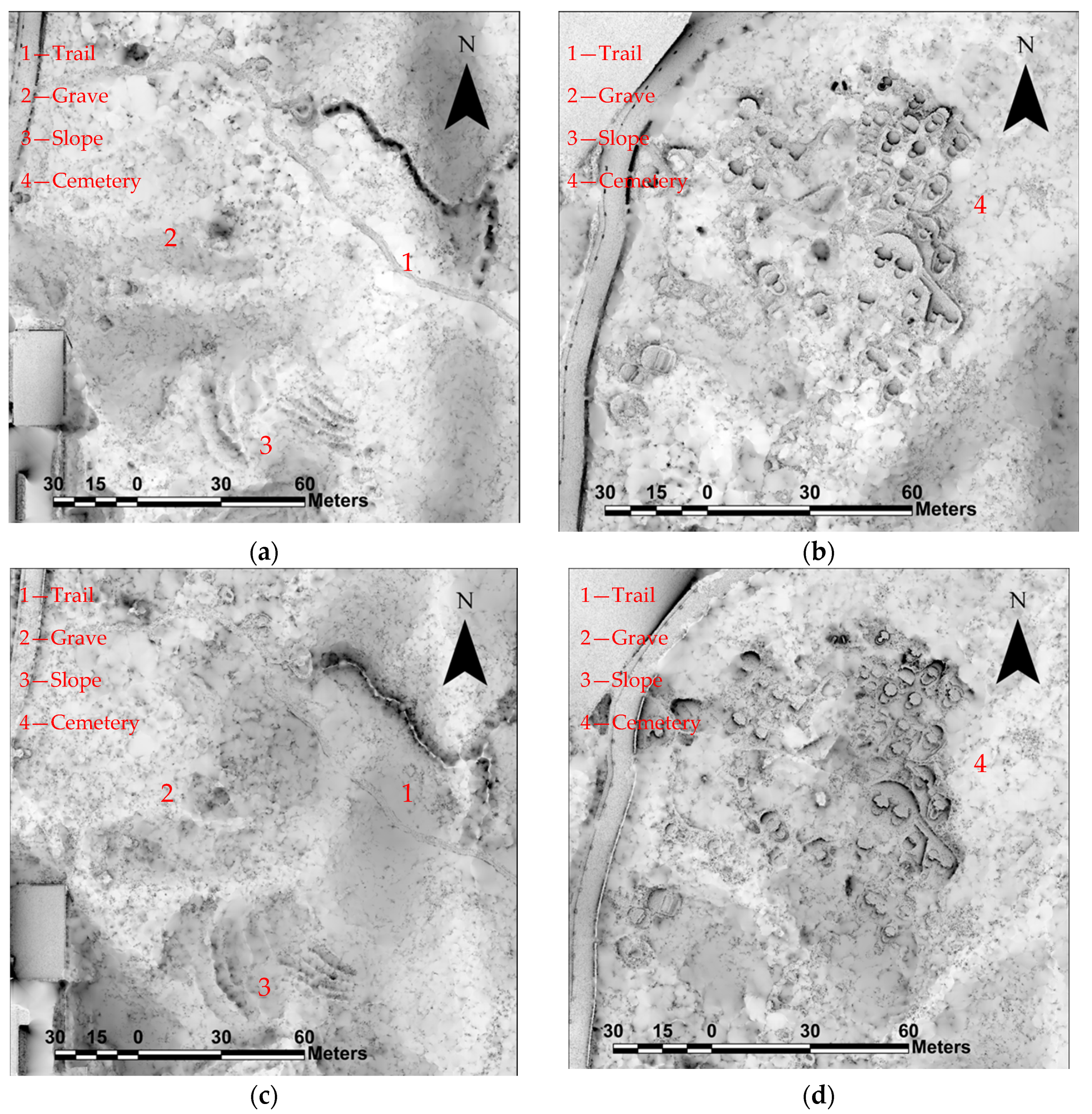
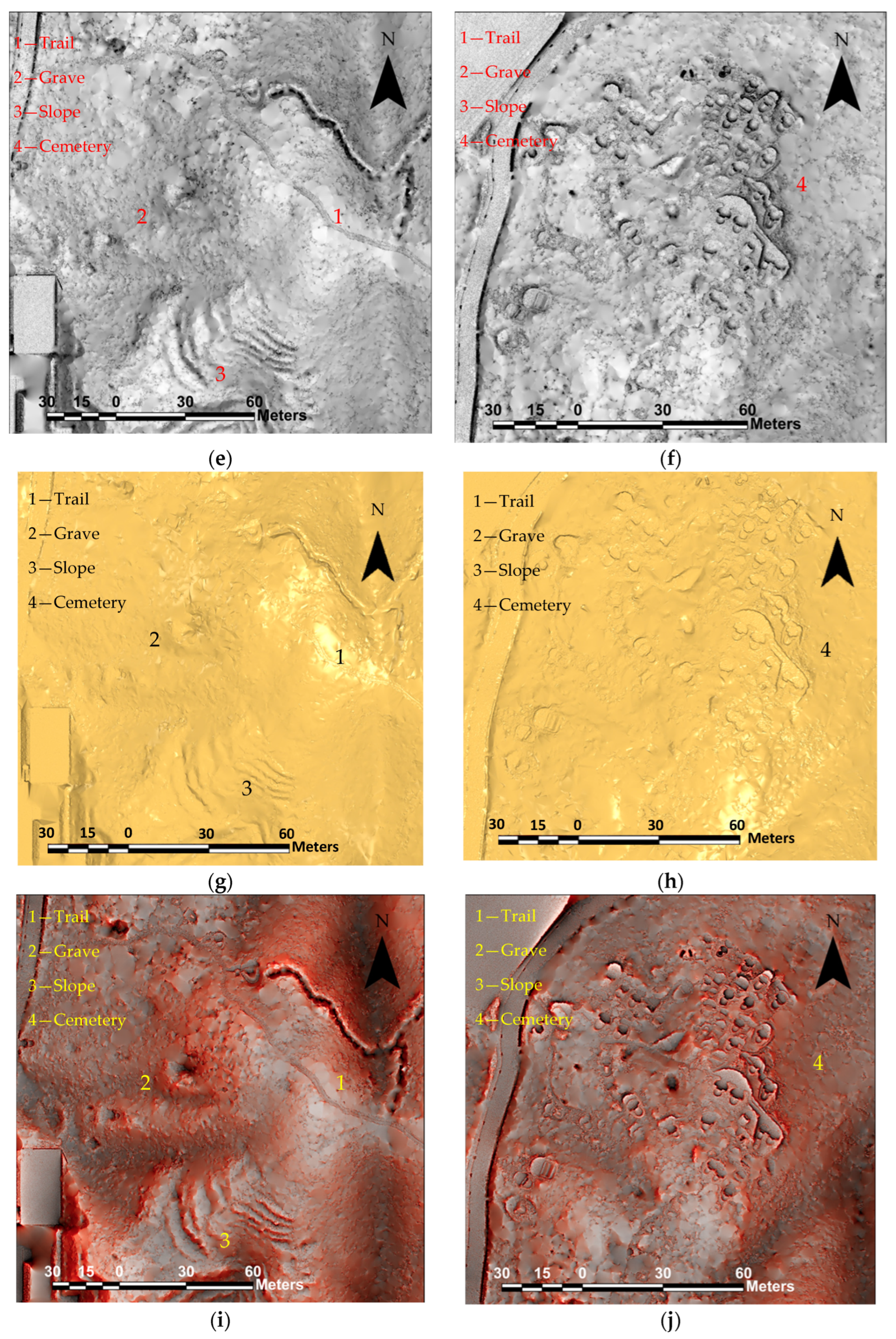
3.2. Tier 2—Selection of Visualisation Methods
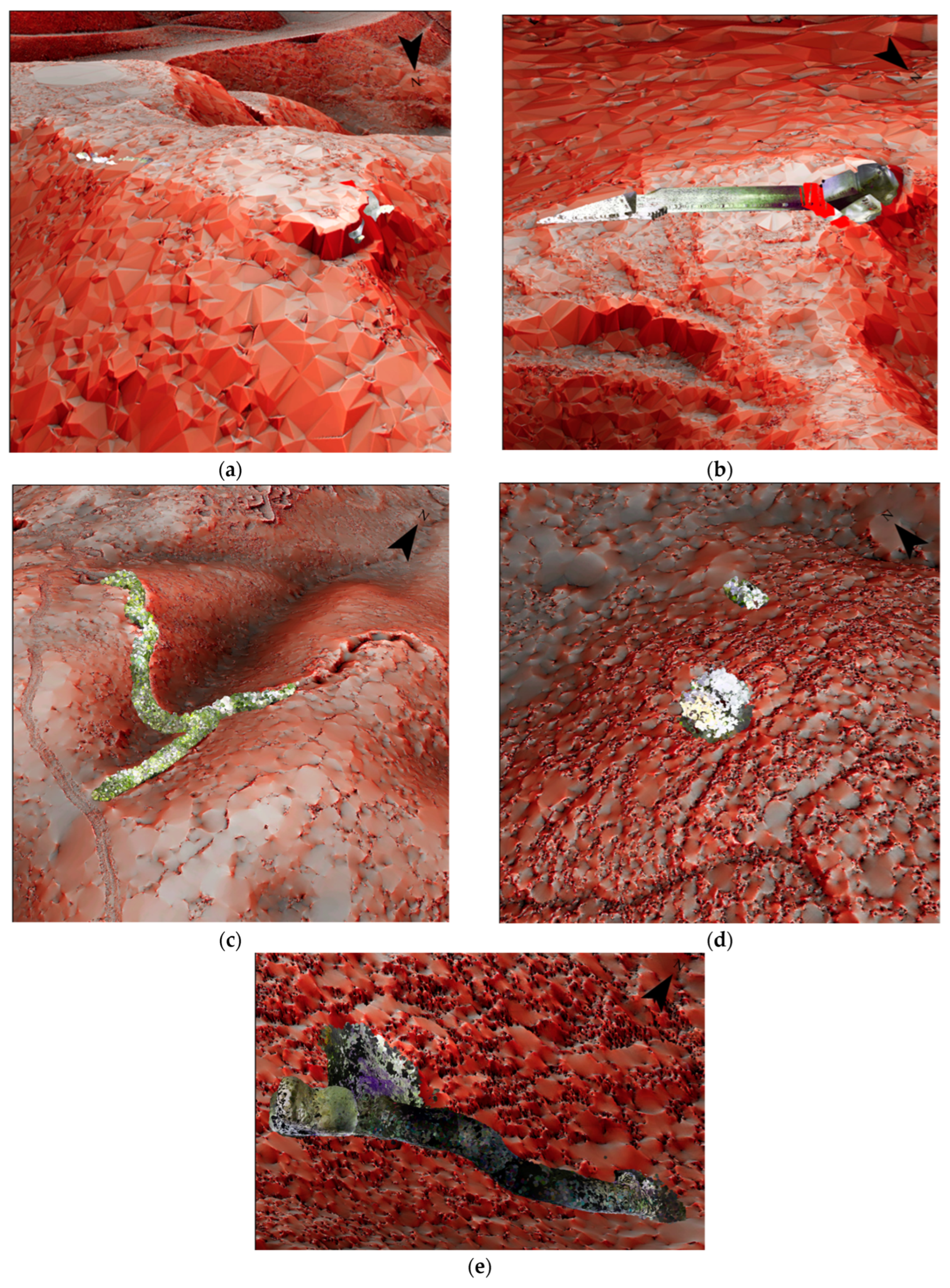
3.3. Tier 3—Field Survey and Validation for Hybrid Air–Ground 3D Modelling of WWII Heritages
4. Results
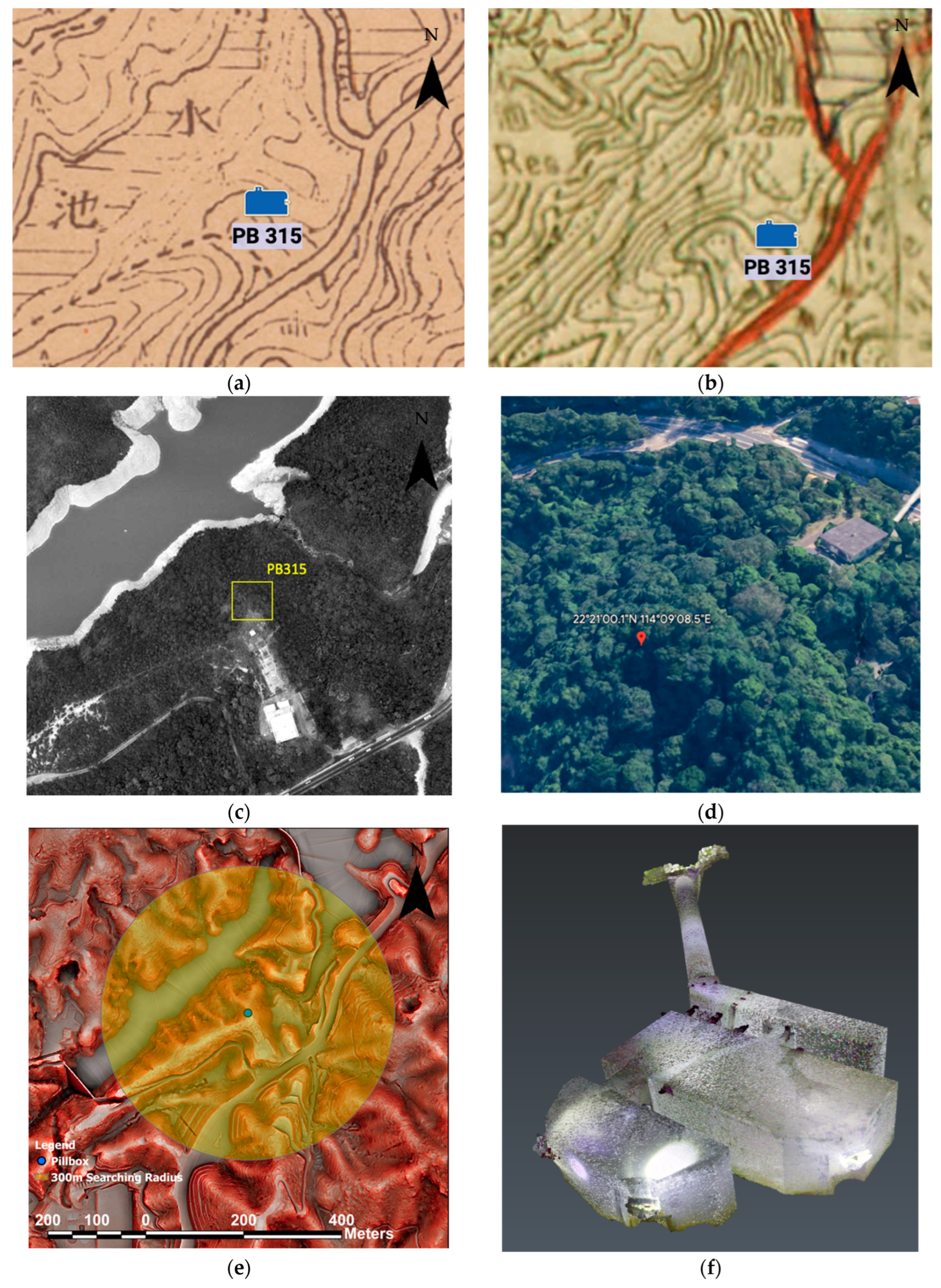
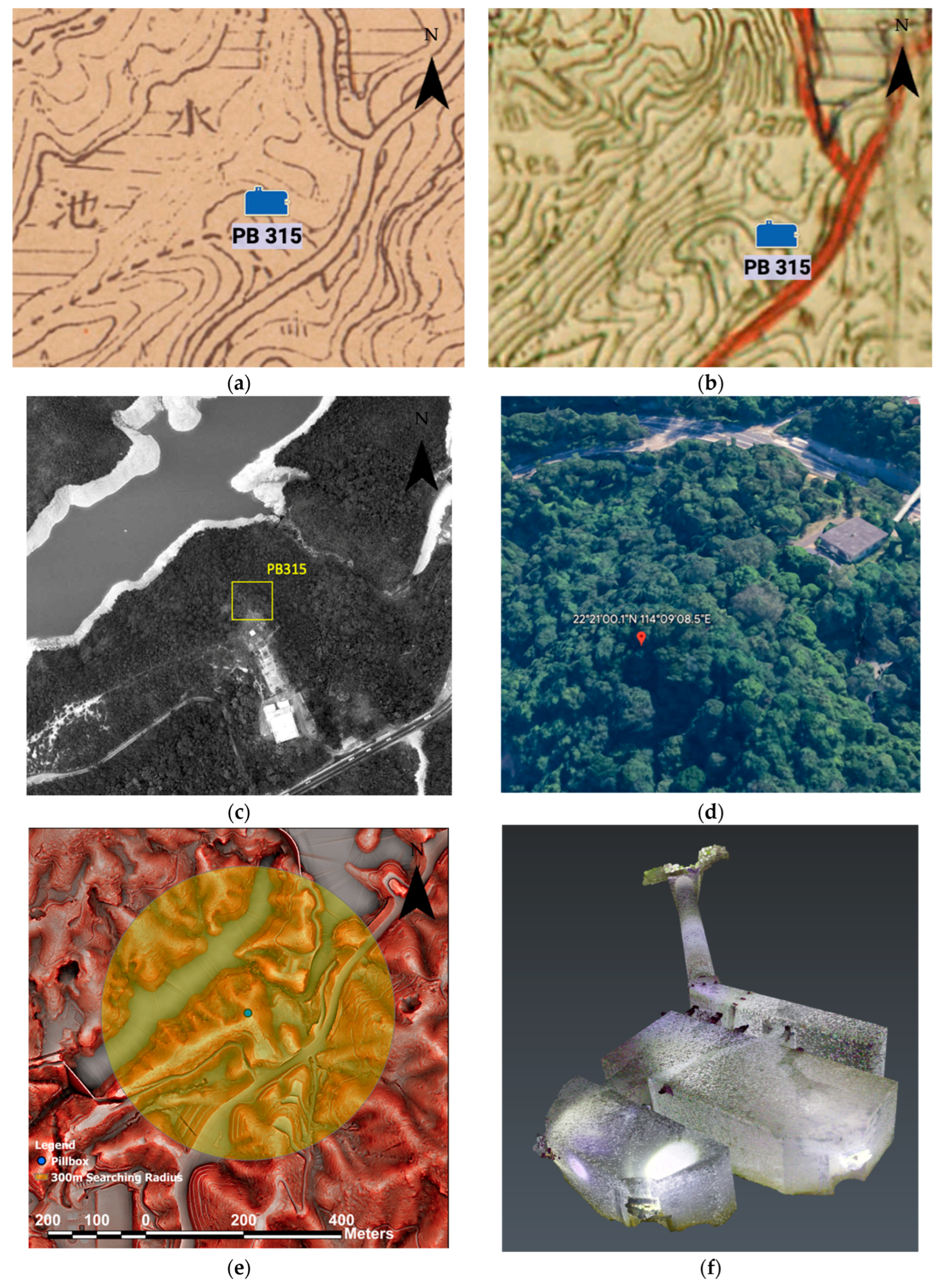
4.1. WWII Feature I—Pillbox PB315 in Kowloon Byewash Reservoir (Figure 9)
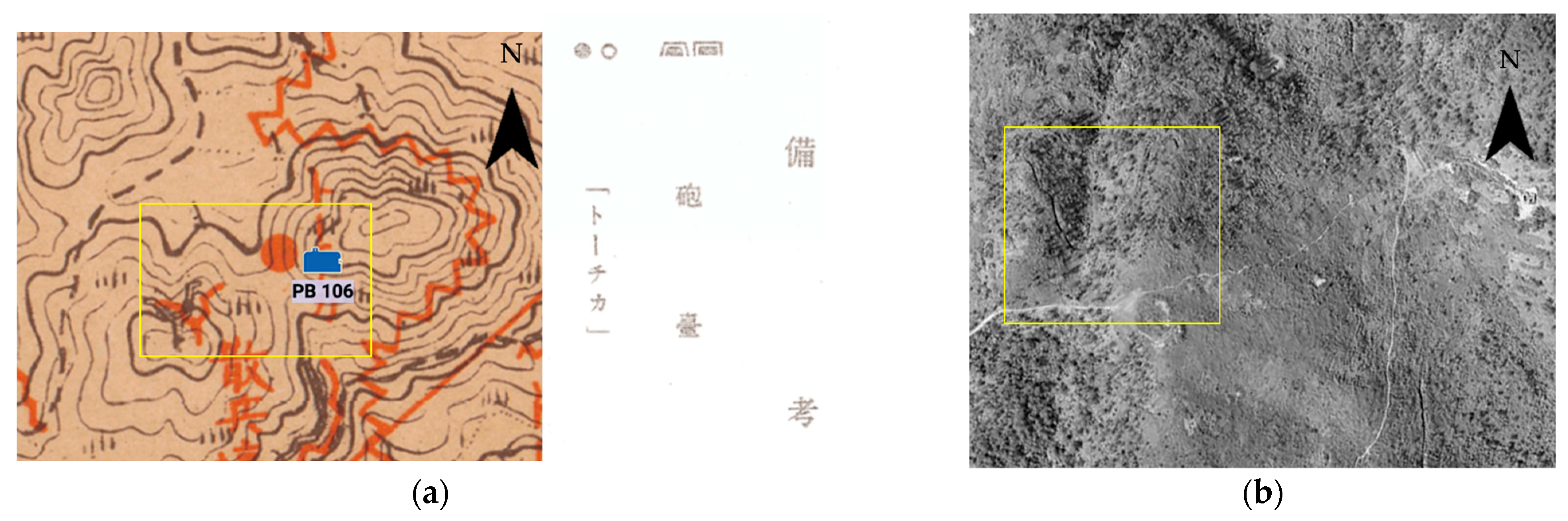
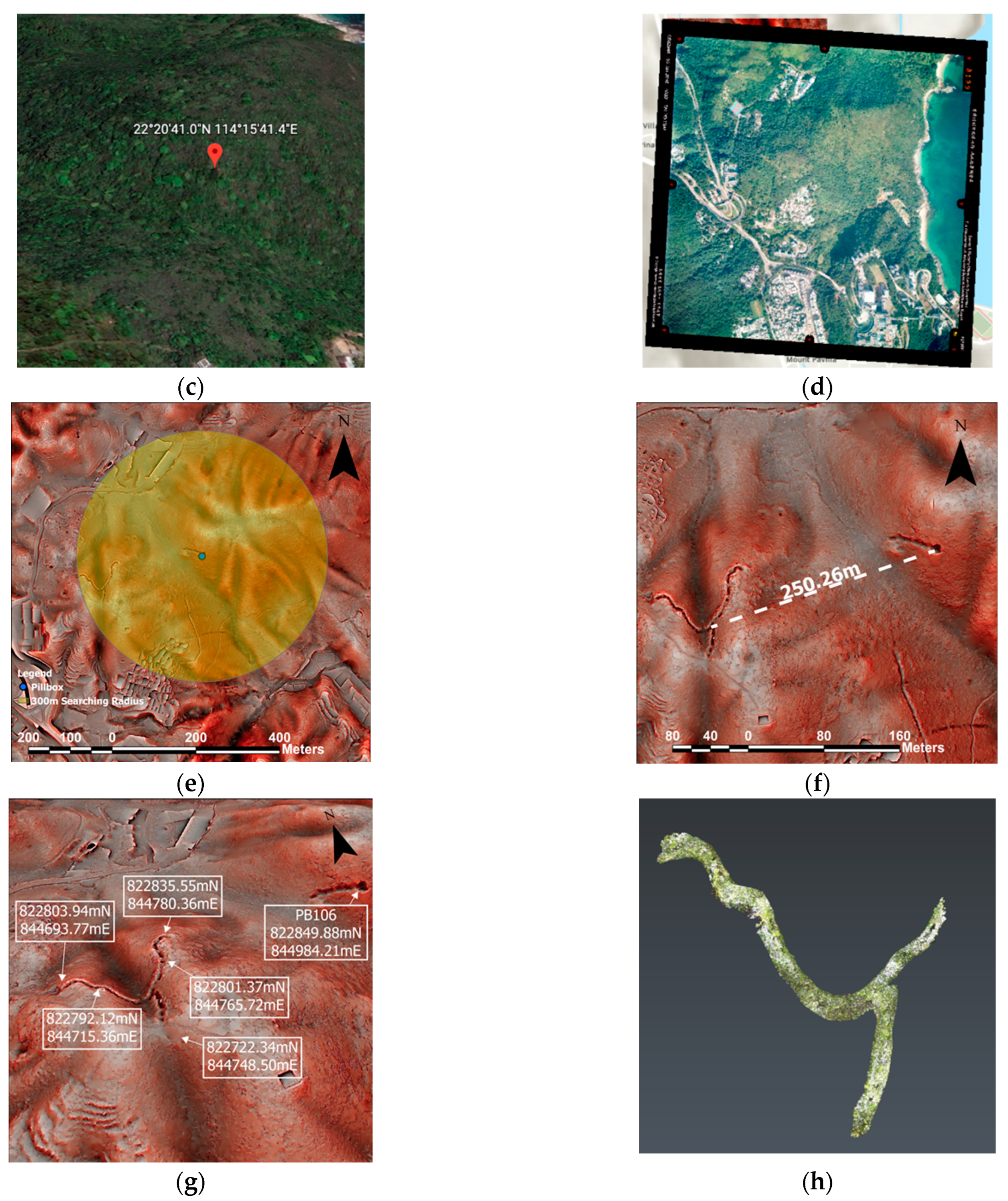
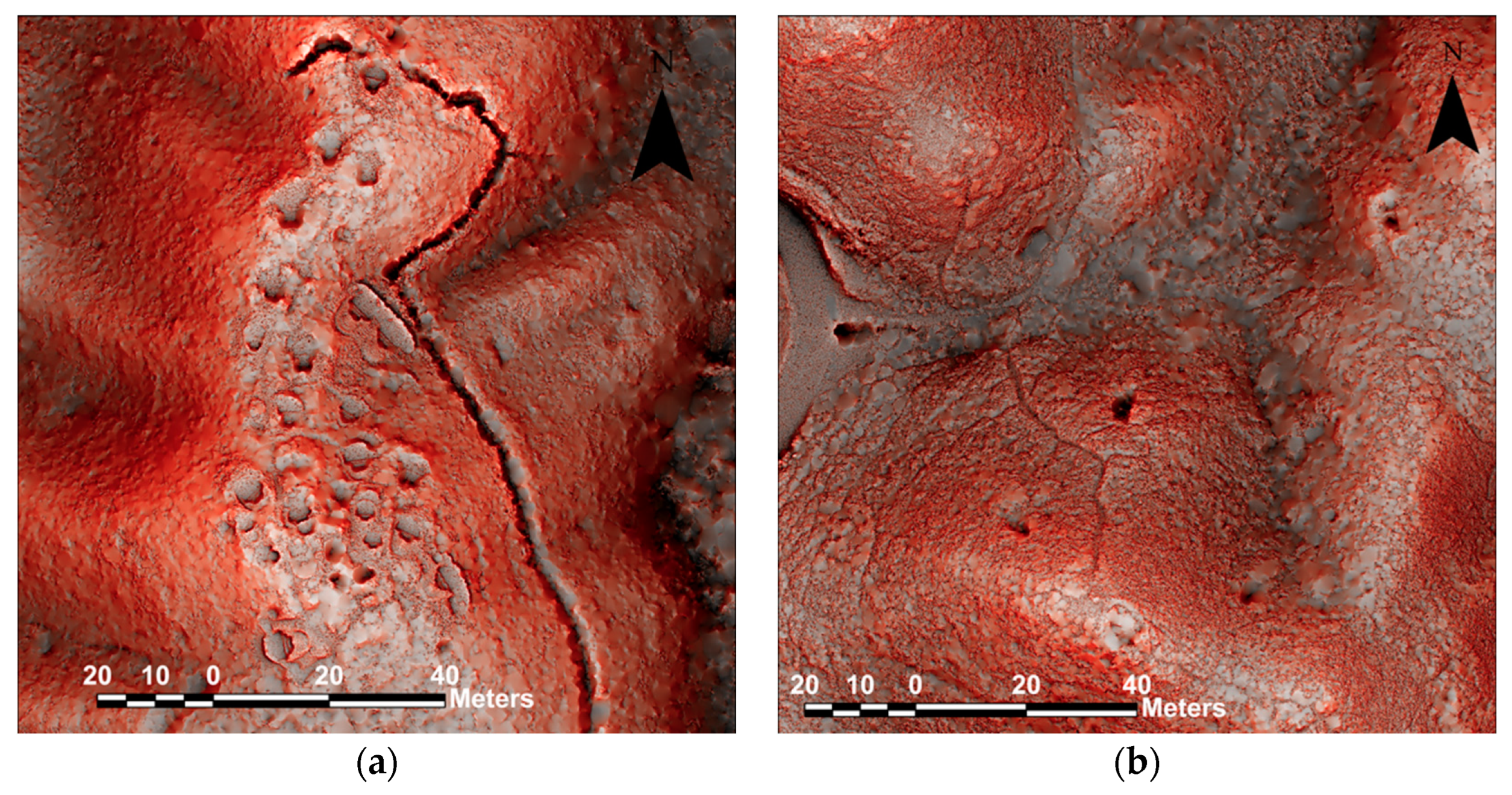
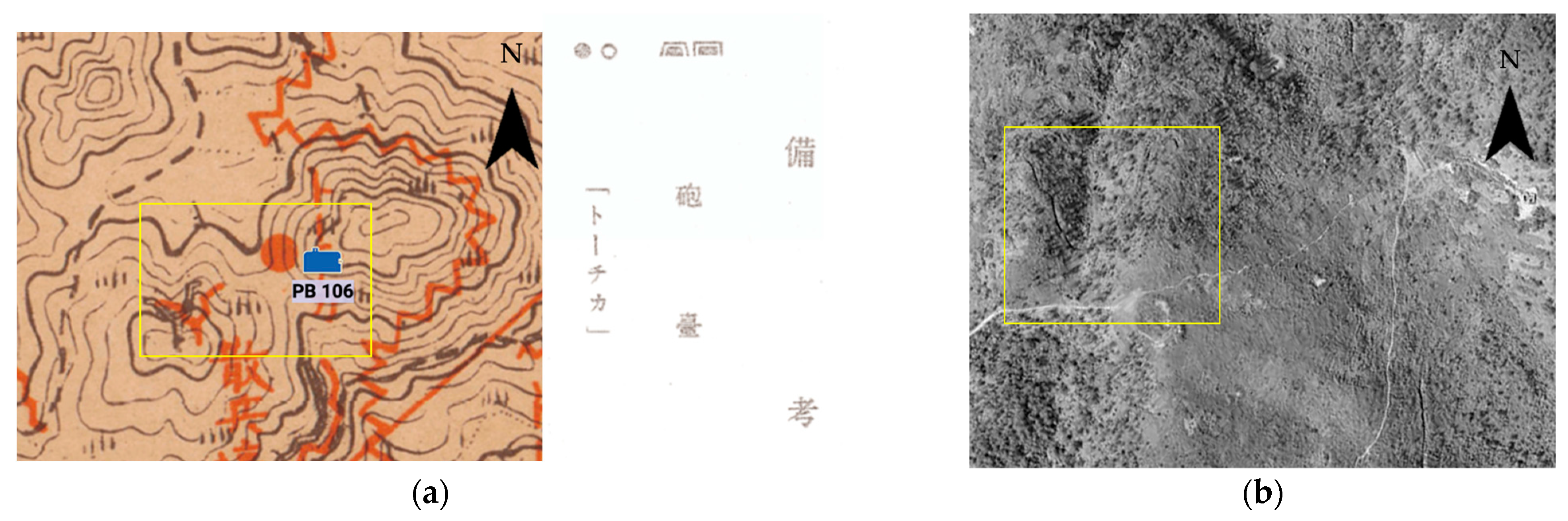
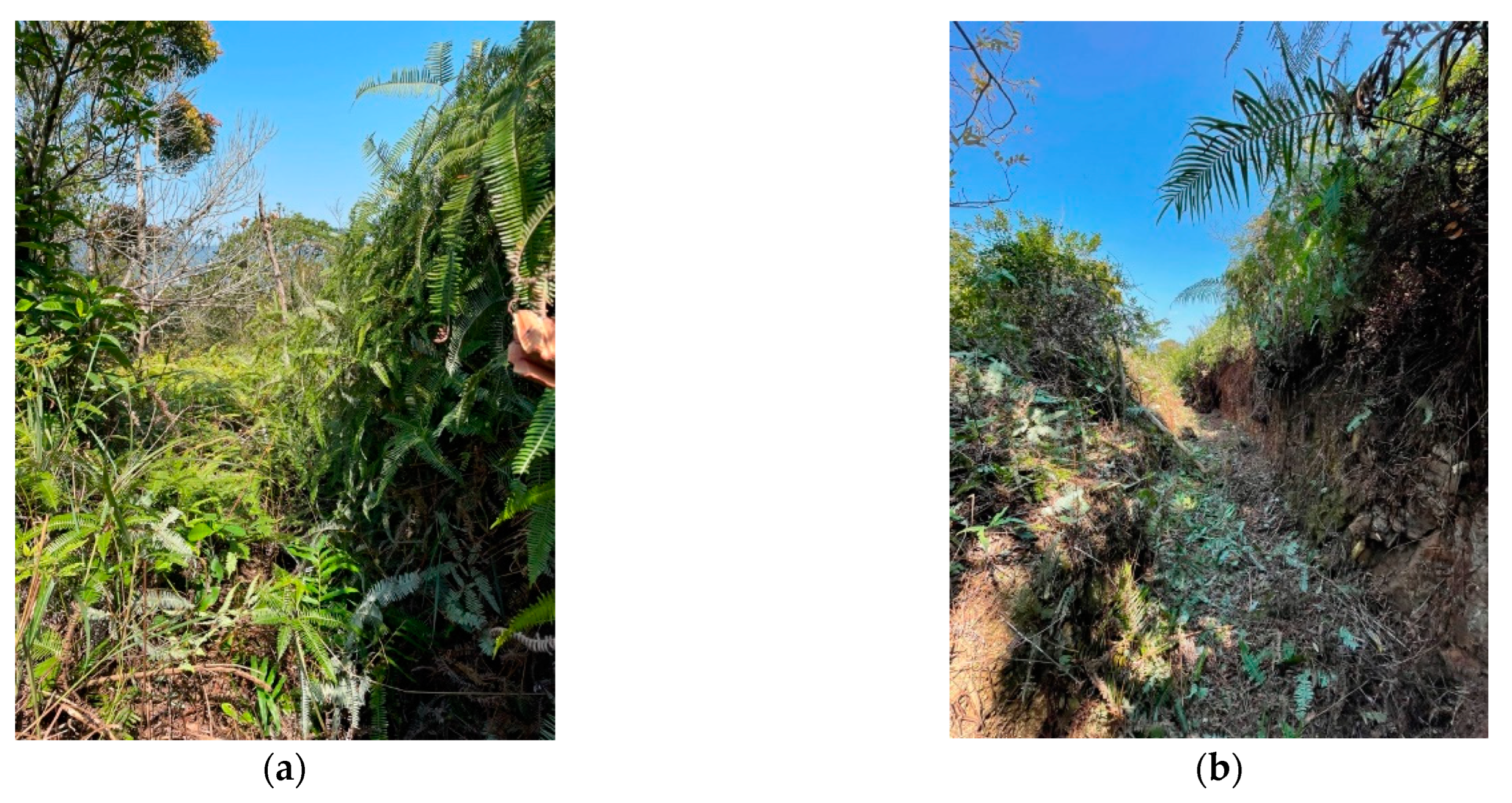
4.2. WWII Feature II—The Y-Shaped Trench near PB106 in Pak Shui Wun (Figure 11)
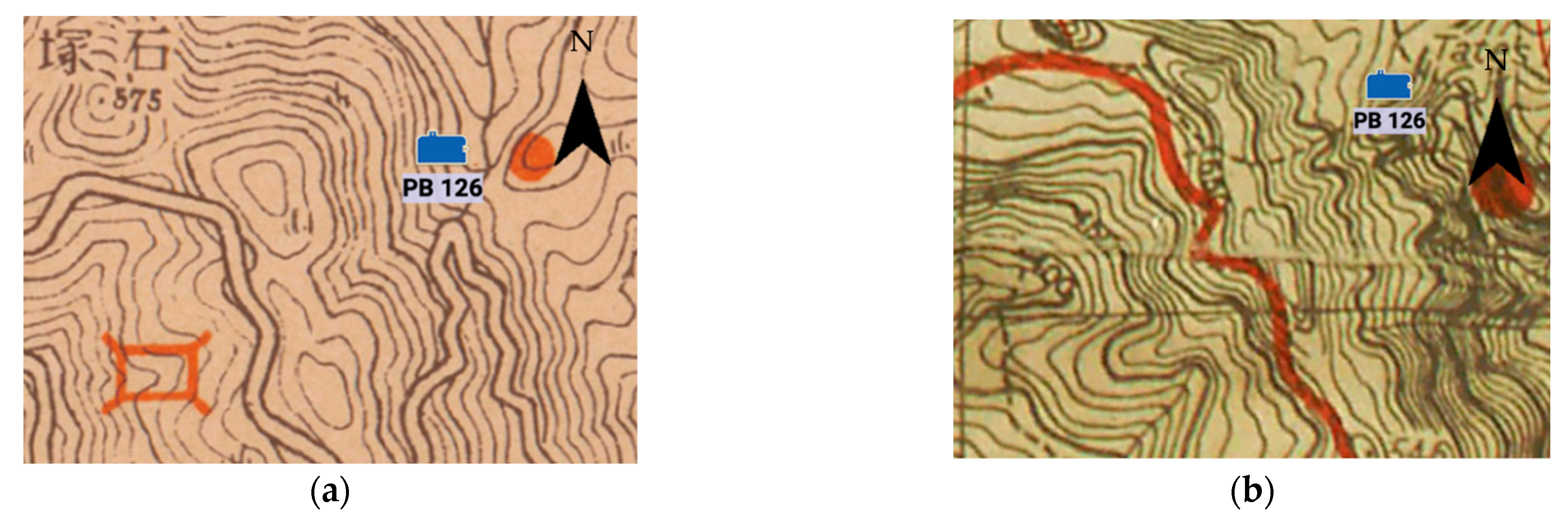
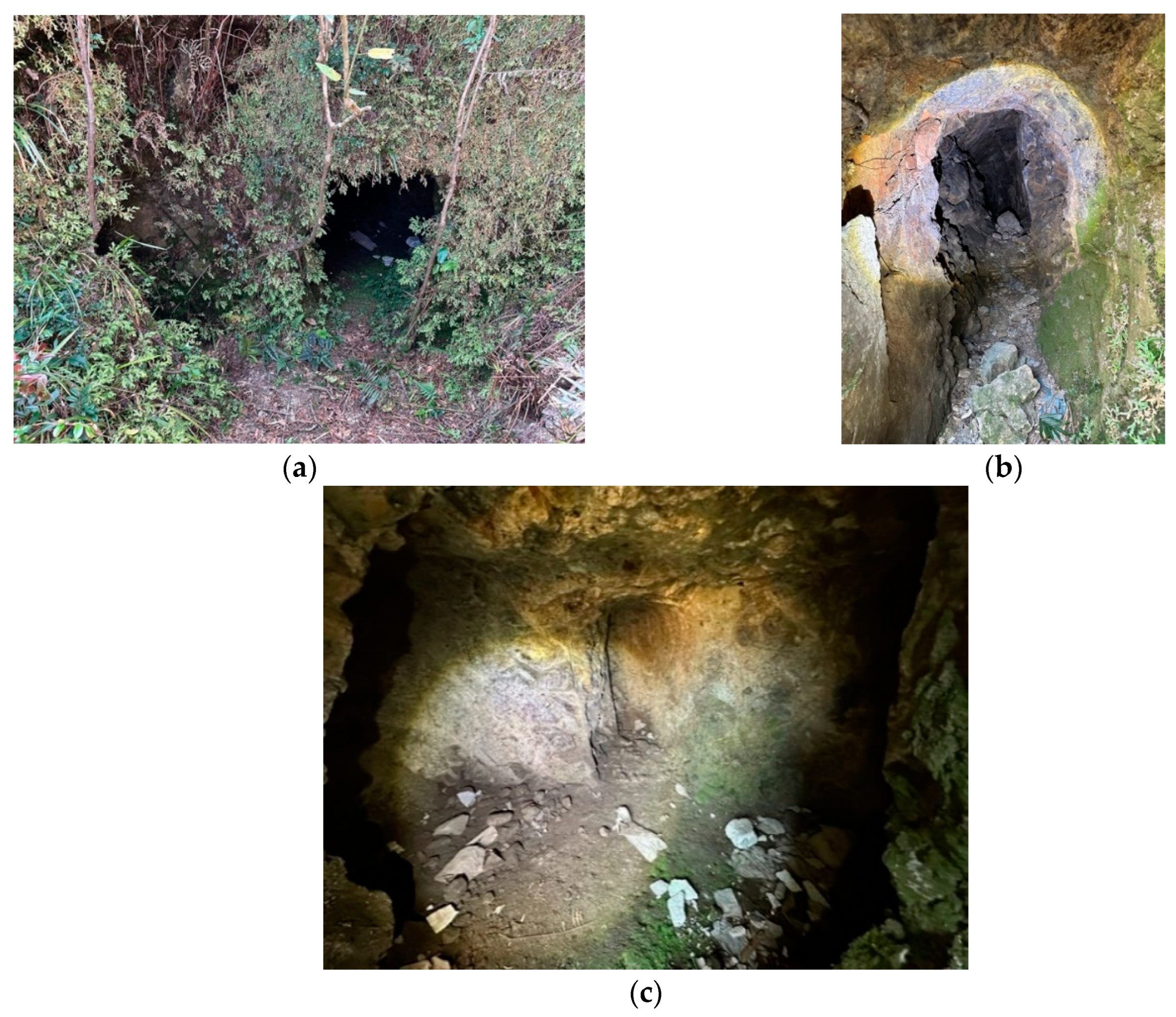
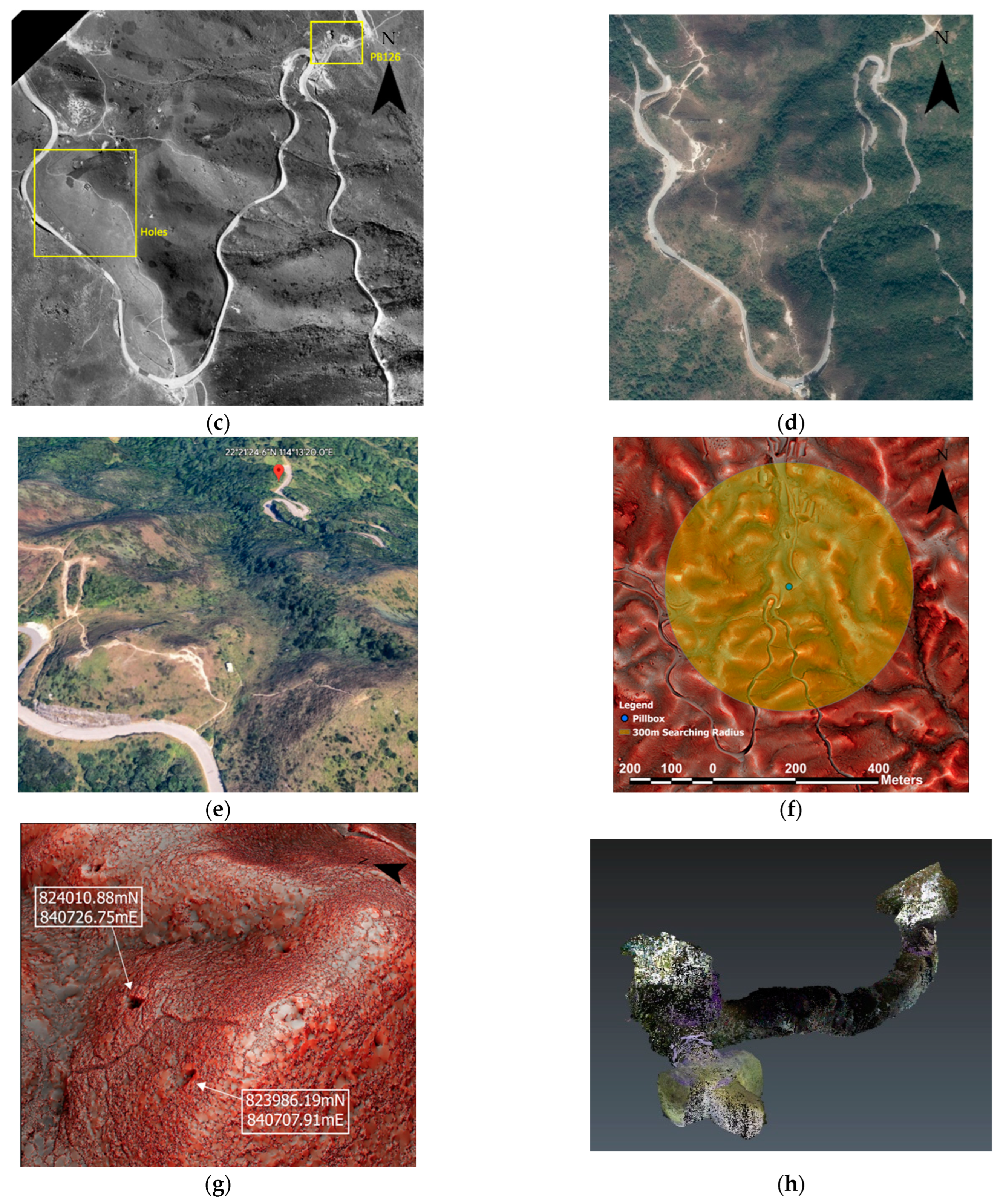
4.3. WWII Features III and IV—Tunnel and Cave near PB126 in Kowloon Peak (Figure 13)
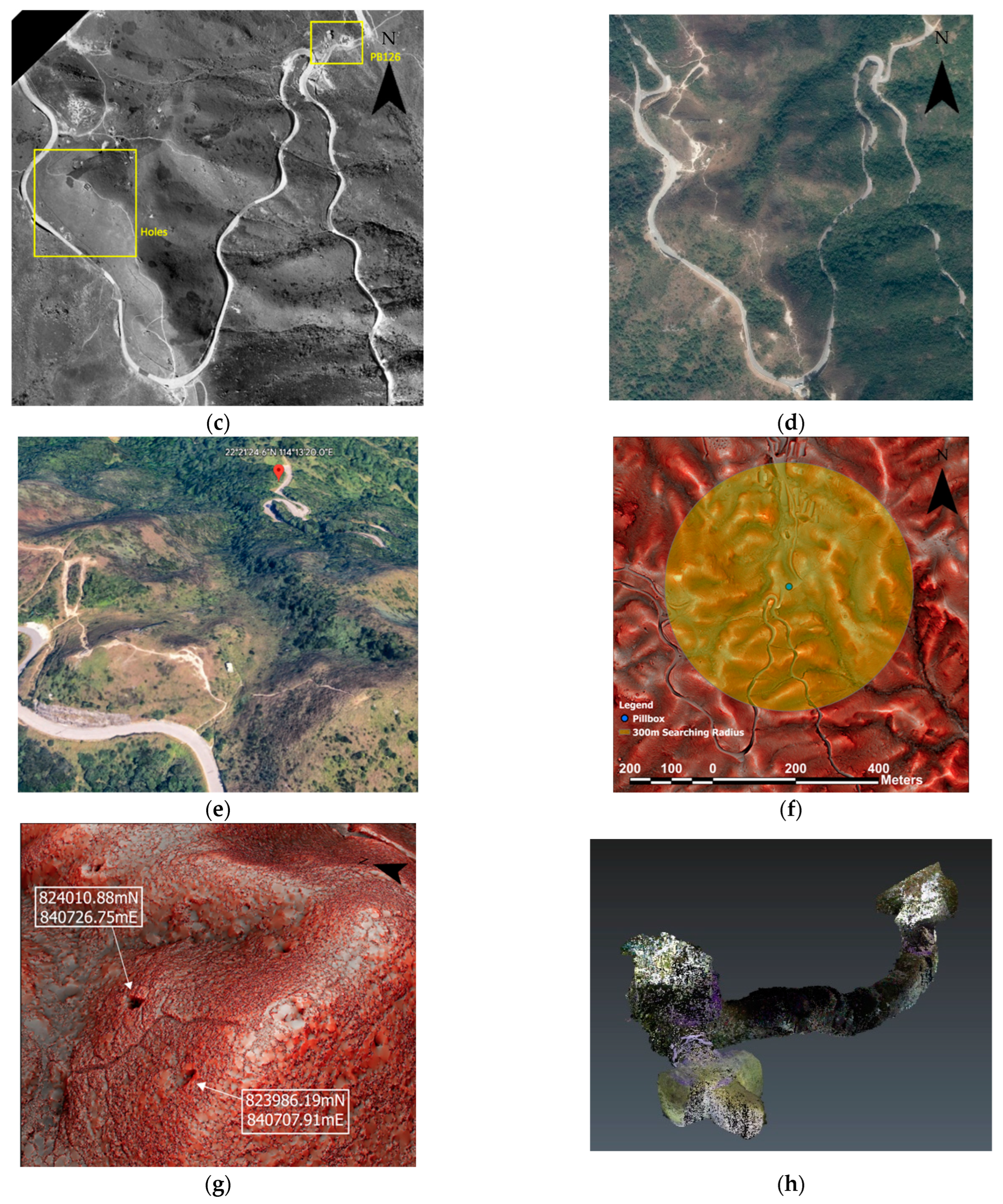
4.4. Modelling of Airborne DTM-RRIM and Ground-Based TLS Scanning
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hong Kong Defence Scheme 1936, 343.01 HON, Hong Kong Public Records Office. Available online: https://www.grs.gov.hk/ws/english/resource/hong_kong_and_WWII/defence/Hong_Kong_and_WWII_1_pic_no_2.html (accessed on 6 June 2023).
- Tan, Y.K.; Davies, S.N.G.; Lai, L.W.C. Pillboxes along the Gin Drinker’s Line, 80 Years after World War II. Surv. Built Environ. 2022, 23, 56–74. [Google Scholar]
- Lohani, B.; Ghosh, S. Airborne LiDAR technology: A review of data collection and processing systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Schindling, J.; Gibbes, C. LiDAR as a tool for archaeological research: A case study. Archaeol. Anthropol. Sci. 2014, 6, 411–423. [Google Scholar] [CrossRef]
- Foley, B.; Mindell, D. Precision survey and archaeological methodology in deep water. ENALIA J. Hell. Inst. Mar. Archaeol. 2002, 6, 49–56. [Google Scholar]
- Opitz, R.S.; Ryzewski, K.; Cherry, J.F.; Moloney, B. Using Airborne LiDAR Survey to explore Historic-era archaeological landscapes of Montserrat in the Eastern Caribbean. J. Field Archaeol. 2015, 40, 523–541. [Google Scholar] [CrossRef]
- Chase, A.S.; Chase, D.Z.; Chase, A.F. LiDAR for archaeological research and the study of historical landscapes. In Sensing the Past: From Artifact to Historical Site; Springer: Cham, Switzerland, 2017; pp. 89–100. [Google Scholar]
- Chase, A.F.; Chase, D.Z.; Weishampel, J.F. Lasers in the Jungle. Archaeology 2010, 63, 27–29. [Google Scholar]
- Balzani, M.; Santopuoli, N.; Grieco, A.; Zaltron, N. Laser scanner 3D survey in archaeological field: The Forum of Pompeii. In Proceedings of the International Conference on Remote Sensing Archaeology, Beijing, China, 18–21 October 2004; pp. 169–175. [Google Scholar]
- Gheyle, W.; Stichelbaut, B.; Saey, T.; Note, N.; Van den Berghe, H.; Van Eetvelde, V.; Van Meirvenne, M.; Bourgeois, J. Scratching the surface of war. Airborne laser scans of the Great War conflict landscape in Flanders (Belgium). Appl. Geogr. 2018, 90, 55–68. [Google Scholar] [CrossRef]
- Adam, M.; Storch, M.; Rass, C.A. Conflicted landscapes: The Kall Trail. Monitoring transformations of a Second World War heritage site using UAV-lidar remote sensing and ground truthing. Antiquity 2022, 96, 494–499. [Google Scholar] [CrossRef]
- Sevara, C.; Wieser, M.; Doneus, M.; Pfeifer, N. Relative radiometric calibration of airborne LiDAR data for archaeological applications. Remote Sens. 2019, 11, 945. [Google Scholar] [CrossRef]
- Chiba, T.; Kaneta, S.I.; Suzuki, Y. Red relief image map: New visualization method for three dimensional data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1071–1076. [Google Scholar]
- Guyot, A.; Lennon, M.; Hubert-Moy, L. Objective comparison of relief visualization techniques with deep CNN for archaeology. J. Archaeol. Sci. Rep. 2021, 38, 103027. [Google Scholar] [CrossRef]
- Yoeli, P. The mechanisation of analytical hill shading. Cartogr. J. 1967, 4, 82–88. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C. Full-WAVEFORM airborne Laser Scanning as a Tool for Archaeological Reconnaissance. In From Space to Place. 2nd International Conference on Remote Sensing in Archaeology; BAR International Series; Campana, S., Forte, M., Eds.; BAR: Oxford, UK, 2006; Volume 1568, p. 99. [Google Scholar]
- Yokoyama, R.; Shirasawa, M.; Pike, R.J. Visualizing topography by openness: A new application of image processing to digital elevation models. Photogramm. Eng. Remote Sens. 2002, 68, 257–266. [Google Scholar]
- Doneus, M. Openness as visualization technique for interpretative mapping of airborne lidar derived digital terrain models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef]
- Hesse, R. Visualisierung hochauflösender digitaler Geländemodelle mit LiVT. In 3D-Anwendungen in der Archäologie: Computeranwendungen und quantitative Methoden in der Archäologie; Edition Topoi: Berlin, Germany, 2016. [Google Scholar]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Guyot, A.; Hubert-Moy, L.; Lorho, T. Detecting Neolithic burial mounds from LiDAR-derived elevation data using a multi-scale approach and machine learning techniques. Remote Sens. 2018, 10, 225. [Google Scholar] [CrossRef]
- Hesse, R. 5.5 Using lidar-derived Local Relief Models (lrm) as a new tool for archaeological prospection. In Landscape Archaeology between Art and Science; Amsterdam University Press: Amsterdam, The Netherlands, 2015; p. 369. [Google Scholar]
- Kokalj, Ž.; Zakšek, K.; Oštir, K. Application of sky-view factor for the visualisation of historic landscape features in lidar-derived relief models. Antiquity 2011, 85, 263–273. [Google Scholar] [CrossRef]
- Ichita, S.; Tsuyoshi, H.; Tatsuro, C.; Mariko, S. The advanced hydraulic city structure of the royal city of Angkor Thom and vicinity revealed through a high-resolution Red Relief Image Map. Archaeol. Discov. 2015, 4, 22–36. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pillbox: | PB315 | PB106 | PB126 |
| Location: | The knoll to the southwest of the Kowloon Reservoir Dam | To the south of Chuk Kok Hill | Tate’s Pass |
| GPS (WGS84): | 22°21′0.08″ N 114°9′8.52″ E | 22°20′40.98″ N 114°15′41.36″ E | 22°21′24.56″ N 114°13′20.03″ E |
| Construction details: | A large three-loophole PB linked by a tunnel to a concrete entrance trench | A two-loophole PB linked by a brick tunnel | A large three-loophole PB, camouflaged as a big rock, with a concrete entrance trench behind |
| Status: | The PB, its entrance trench, and tunnel are still intact. This is the only PB that remains intact in Gin Drinkers Line | PB walls and the entrance trench remaining | PB walls remaining |
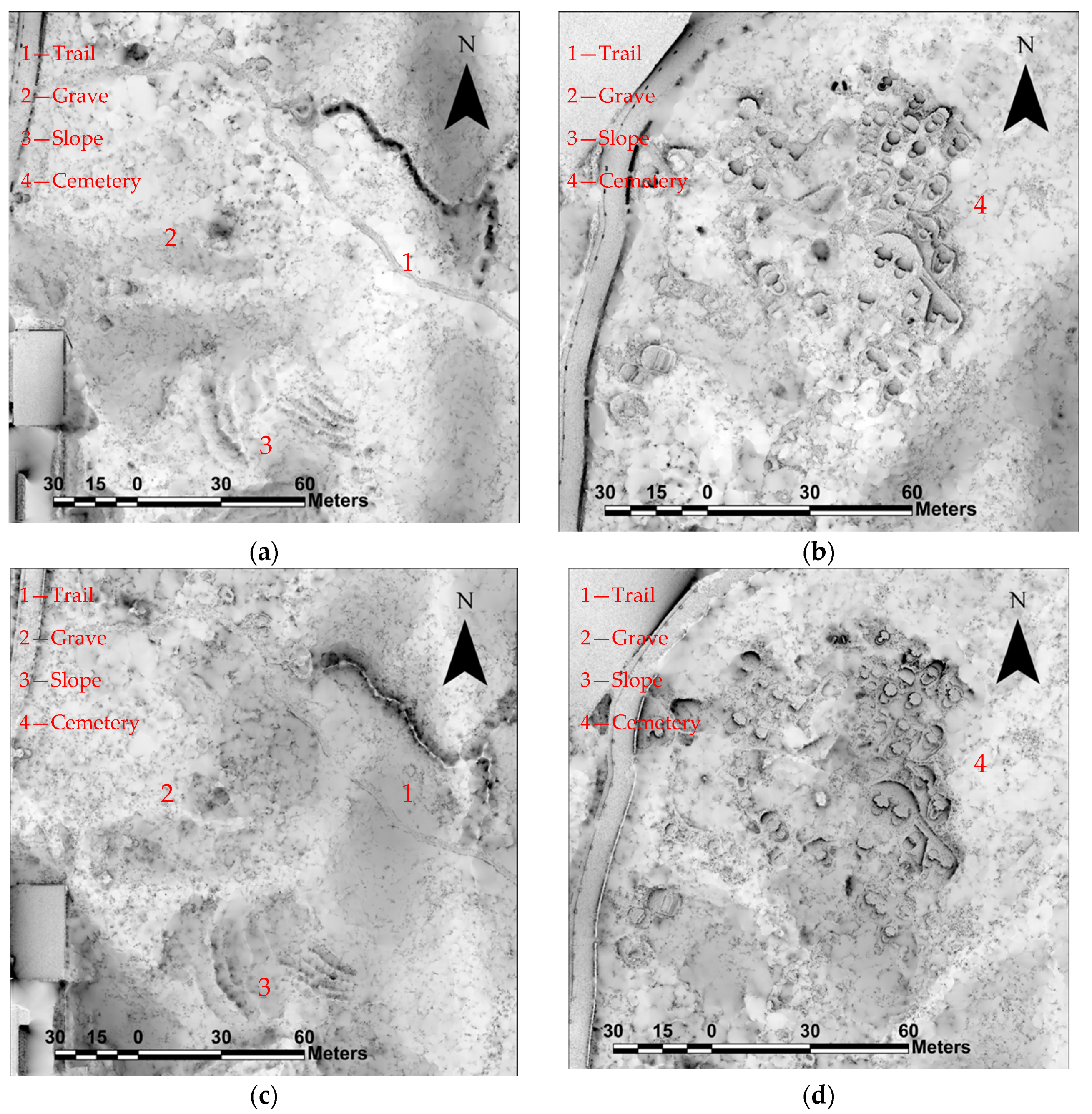
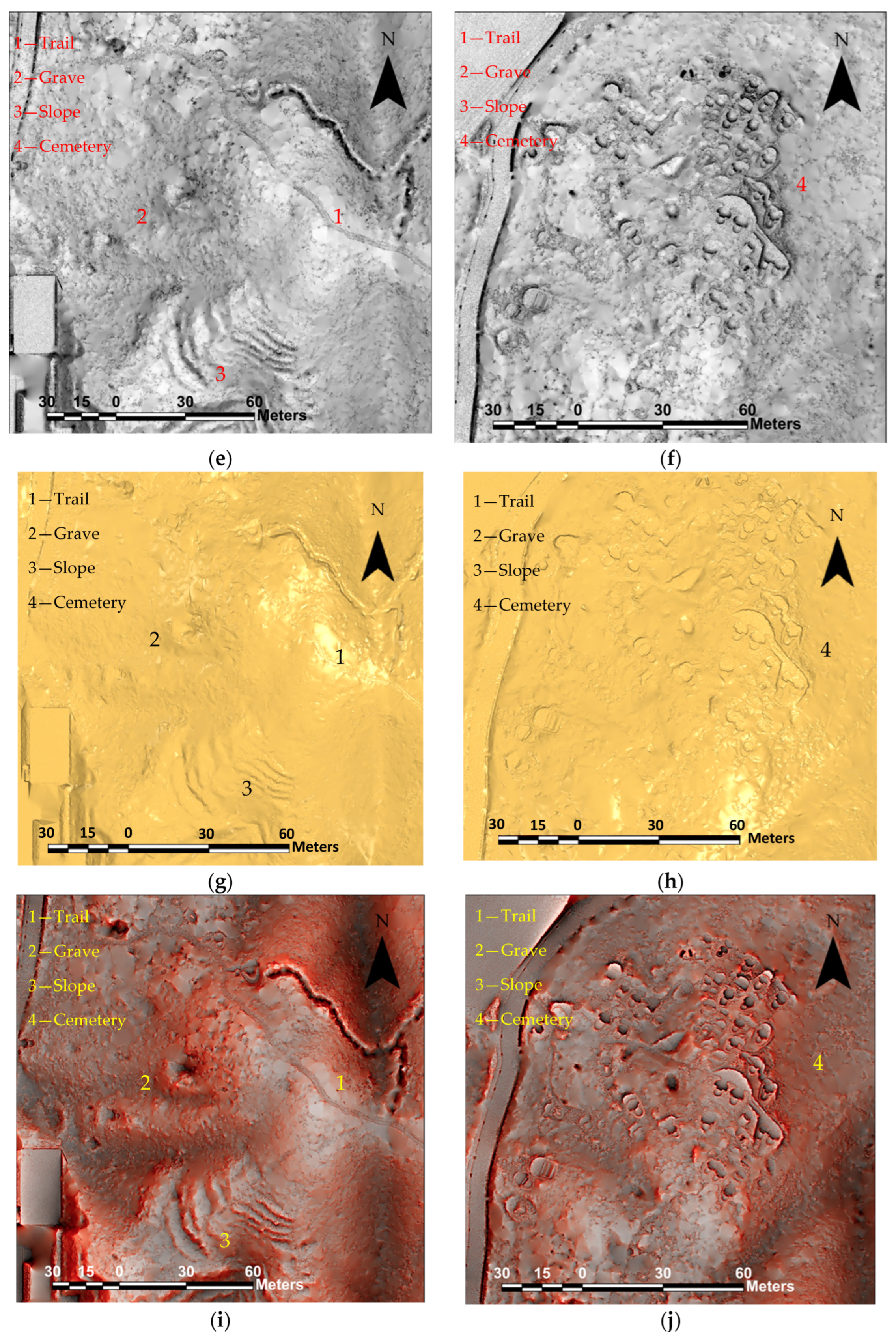
| Method/Feature | Trail (1) | Grave (2) | Slope (3) | Cemetery (4) |
|---|---|---|---|---|
| Positive openness | High | Medium | Low | Medium |
| Negative openness | Low | Low | Low | Medium |
| Sky-view factor | High | High | High | Medium-High |
| Mesh | Low | Low | Medium | Low |
| Red relief image map | High | High | High | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sit, K.F.-C.; Pun, C.-H.; Lai, W.W.L.; Chung, D.K.-W.; Kwong, C.-M. Unfolding WWII Heritages with Airborne and Ground-Based Laser Scanning. Heritage 2023, 6, 6189-6212. https://doi.org/10.3390/heritage6090325
Sit KF-C, Pun C-H, Lai WWL, Chung DK-W, Kwong C-M. Unfolding WWII Heritages with Airborne and Ground-Based Laser Scanning. Heritage. 2023; 6(9):6189-6212. https://doi.org/10.3390/heritage6090325
Chicago/Turabian StyleSit, Kathleen Fei-Ching, Chun-Ho Pun, Wallace W. L. Lai, Dexter Kin-Wang Chung, and Chi-Man Kwong. 2023. "Unfolding WWII Heritages with Airborne and Ground-Based Laser Scanning" Heritage 6, no. 9: 6189-6212. https://doi.org/10.3390/heritage6090325
APA StyleSit, K. F.-C., Pun, C.-H., Lai, W. W. L., Chung, D. K.-W., & Kwong, C.-M. (2023). Unfolding WWII Heritages with Airborne and Ground-Based Laser Scanning. Heritage, 6(9), 6189-6212. https://doi.org/10.3390/heritage6090325