




Structured-Light Scanning and Metrological Analysis for Archaeology: Quality Assessment of Artec 3D Solutions for Cuneiform Tablets


Abstract
1. Introduction
2. Materials and Methods
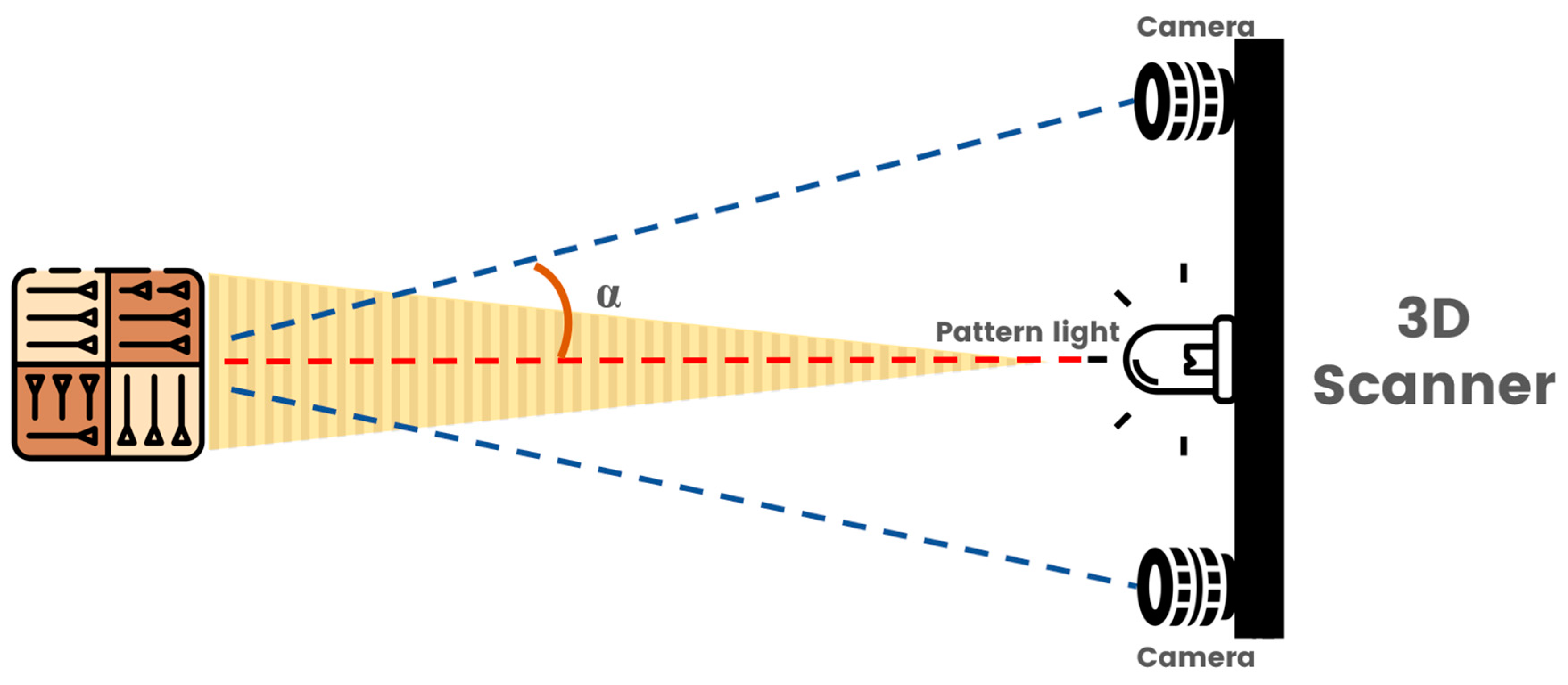
2.1. Structured-Light Scanning
2.2. Artec Micro
2.3. Artec Space Spider
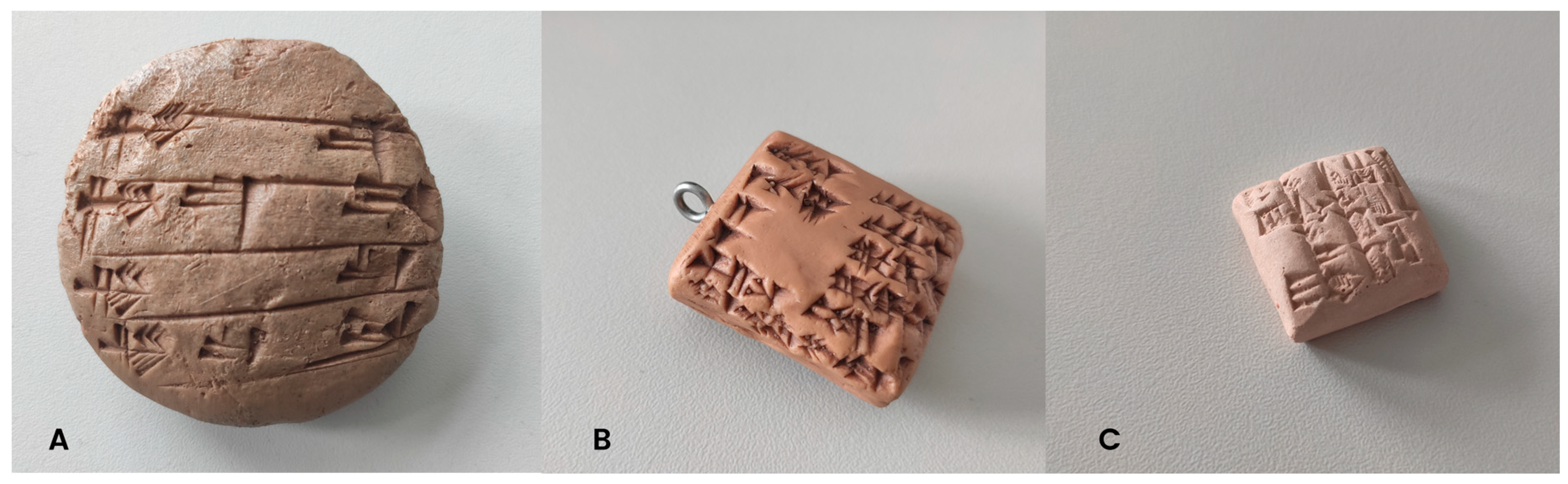
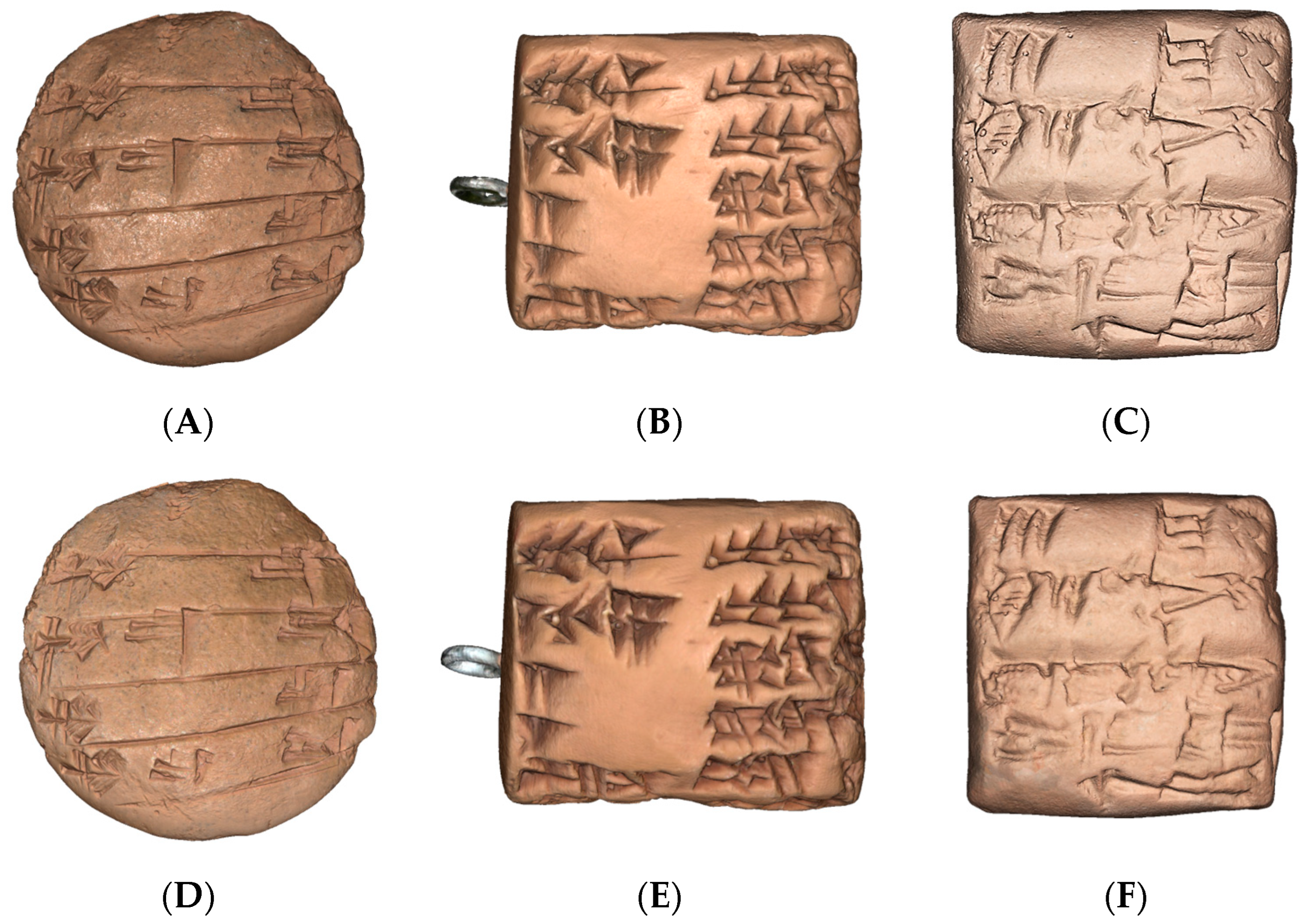
2.4. Cuneiform Replica Tablets
2.5. Scanning Session
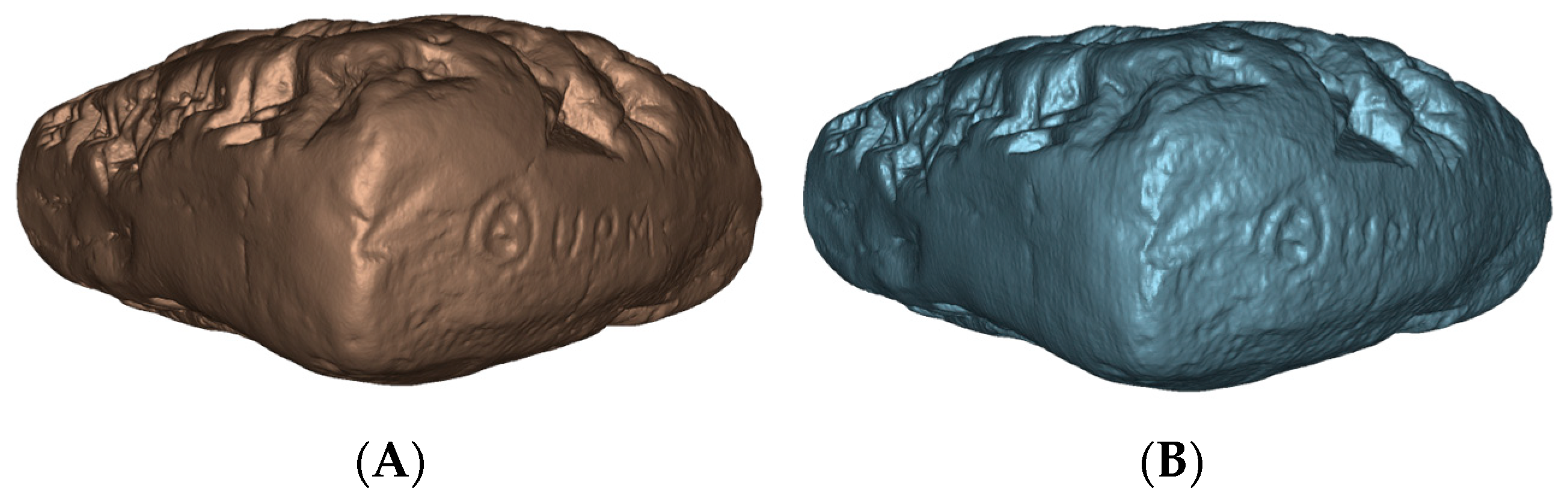
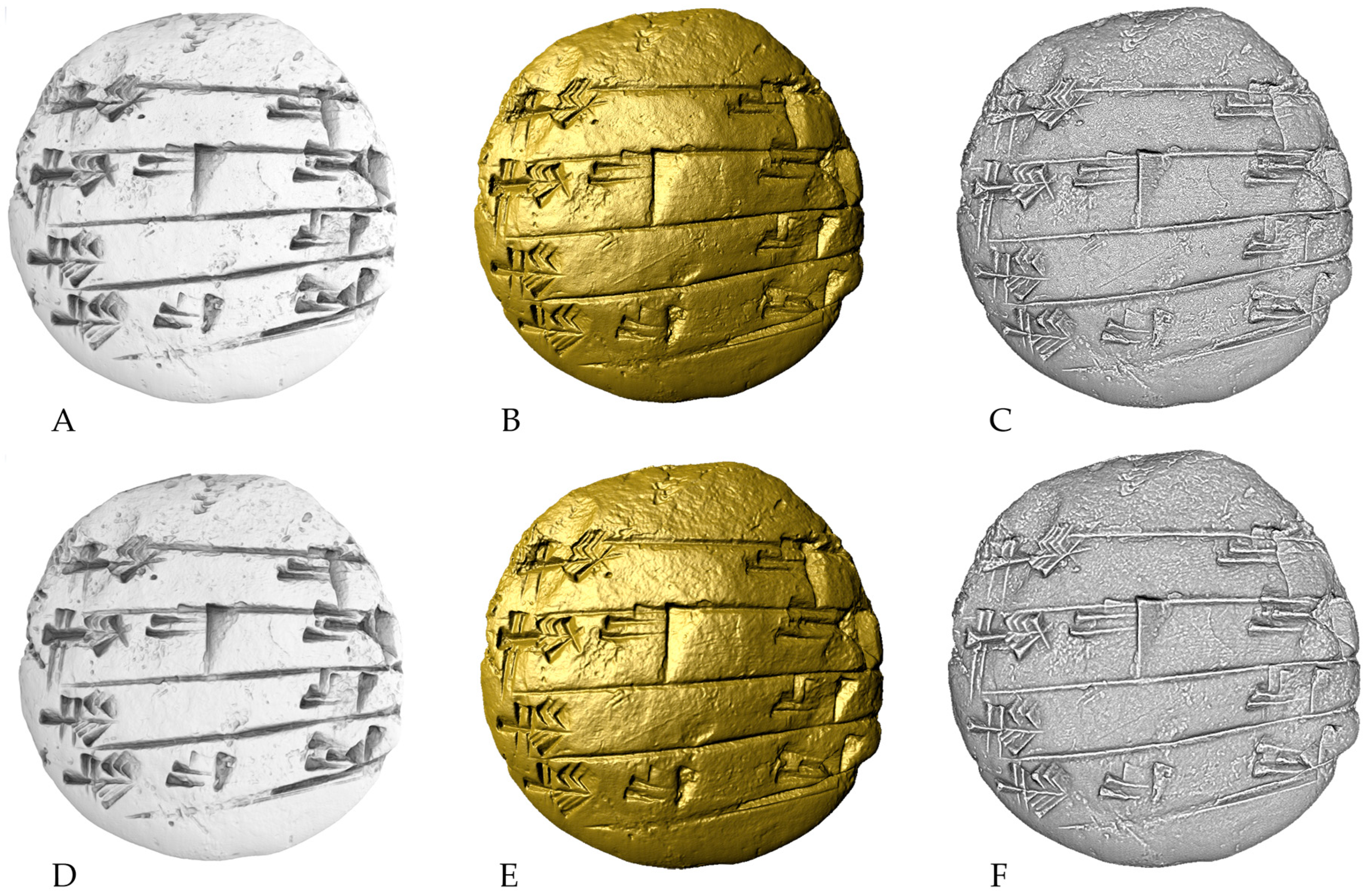
2.5.1. Lenticular Cuneiform Tablet
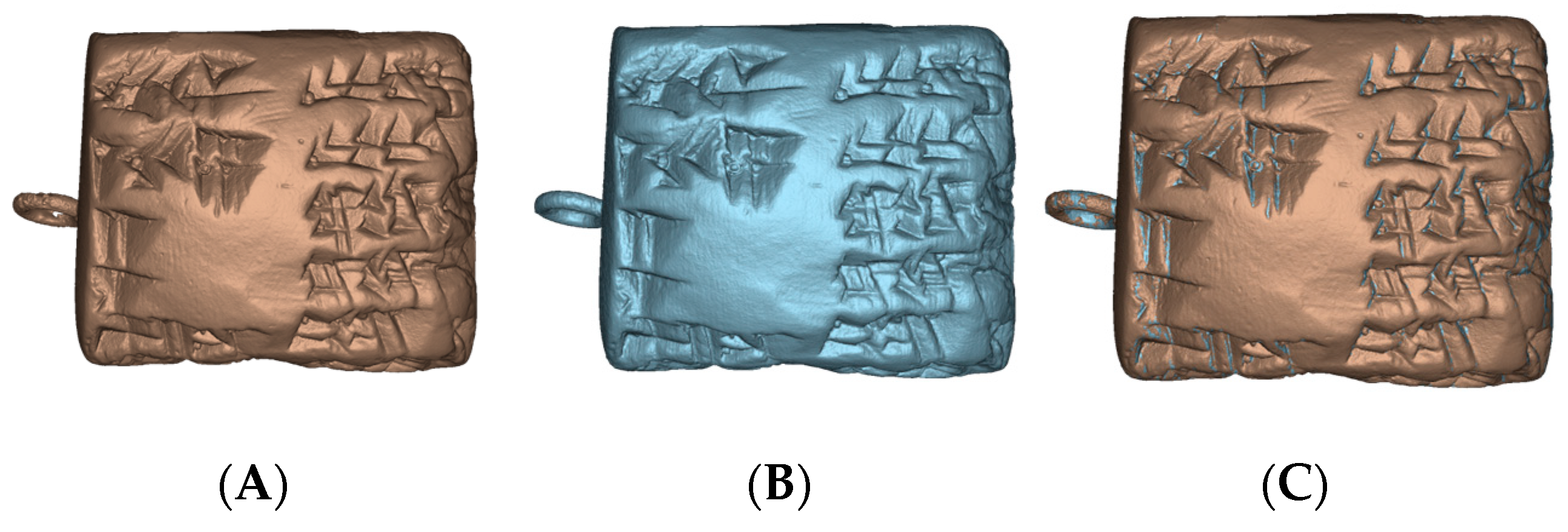
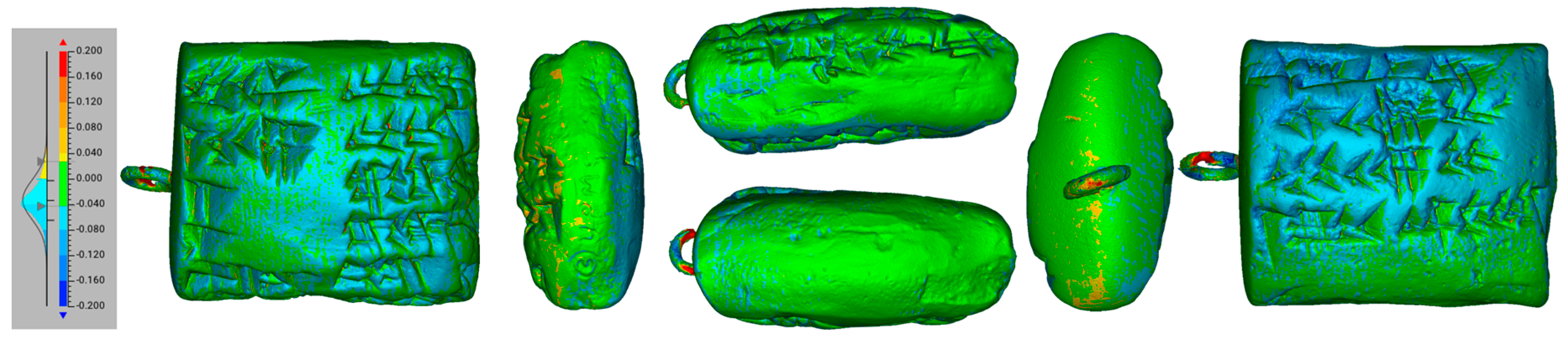
2.5.2. Rectangular Cuneiform Tablet
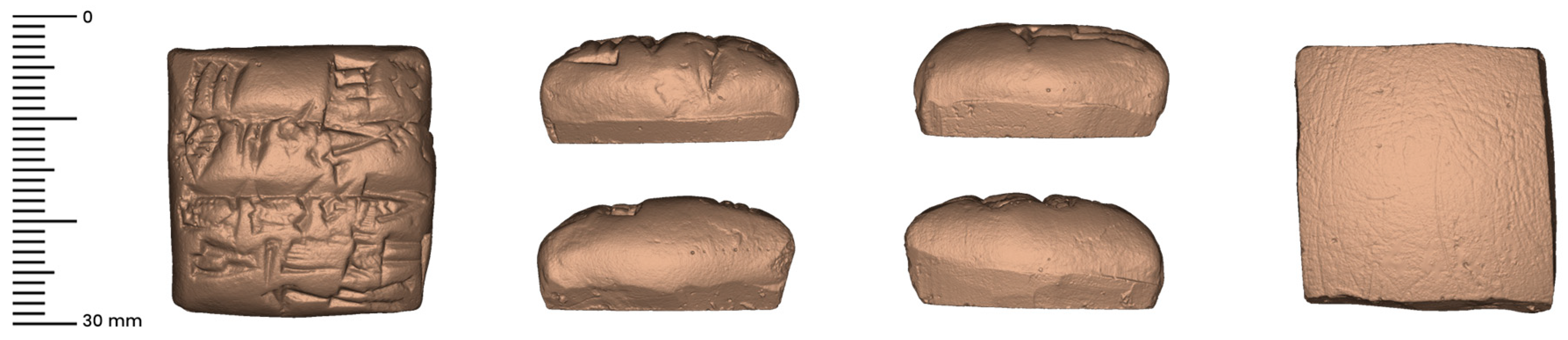
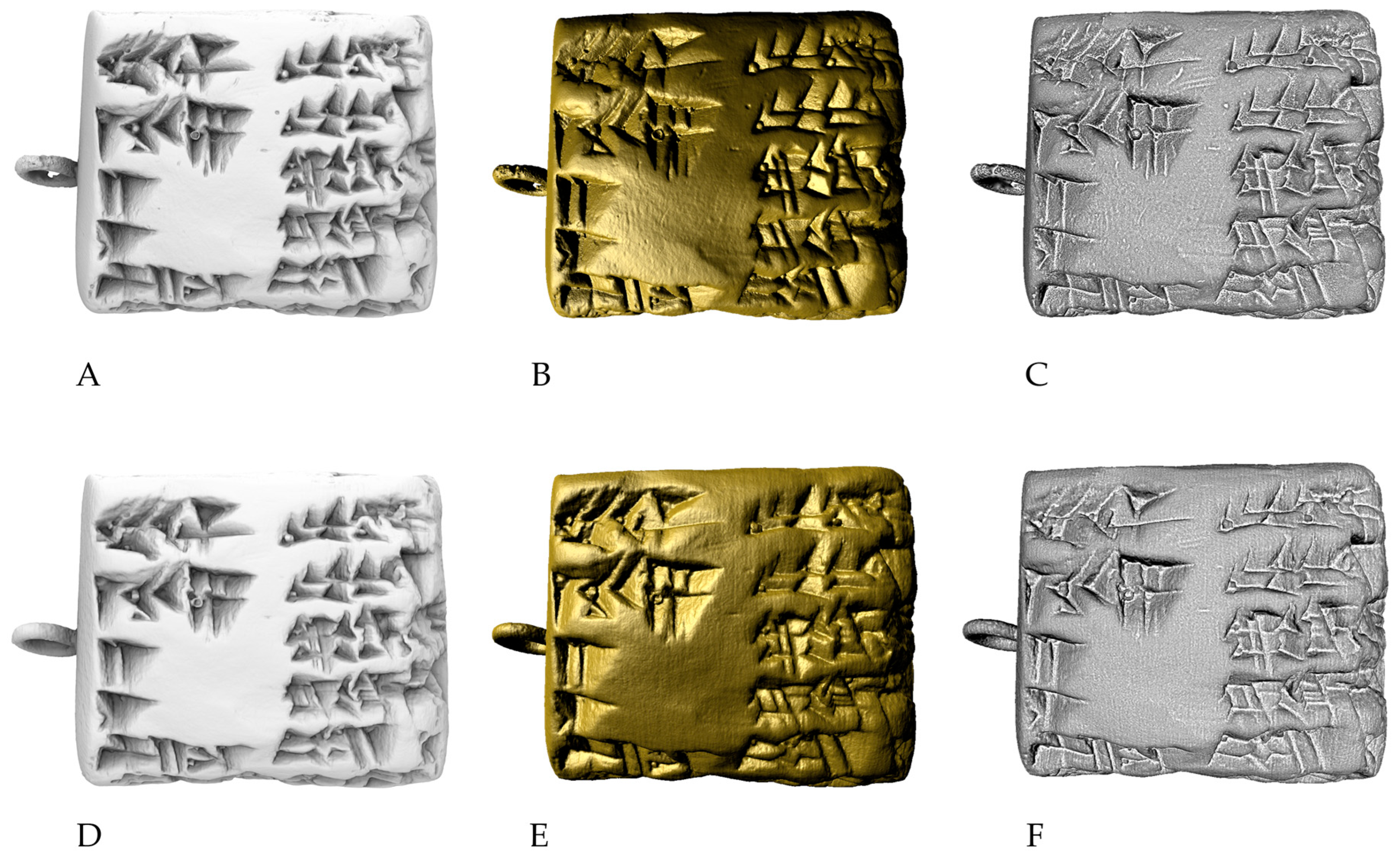
2.5.3. Squared Cuneiform Tablet
2.5.4. Texture Mapping
3. Results
3.1. Distance Map (Mesh to Mesh)
3.2. Density Analysis
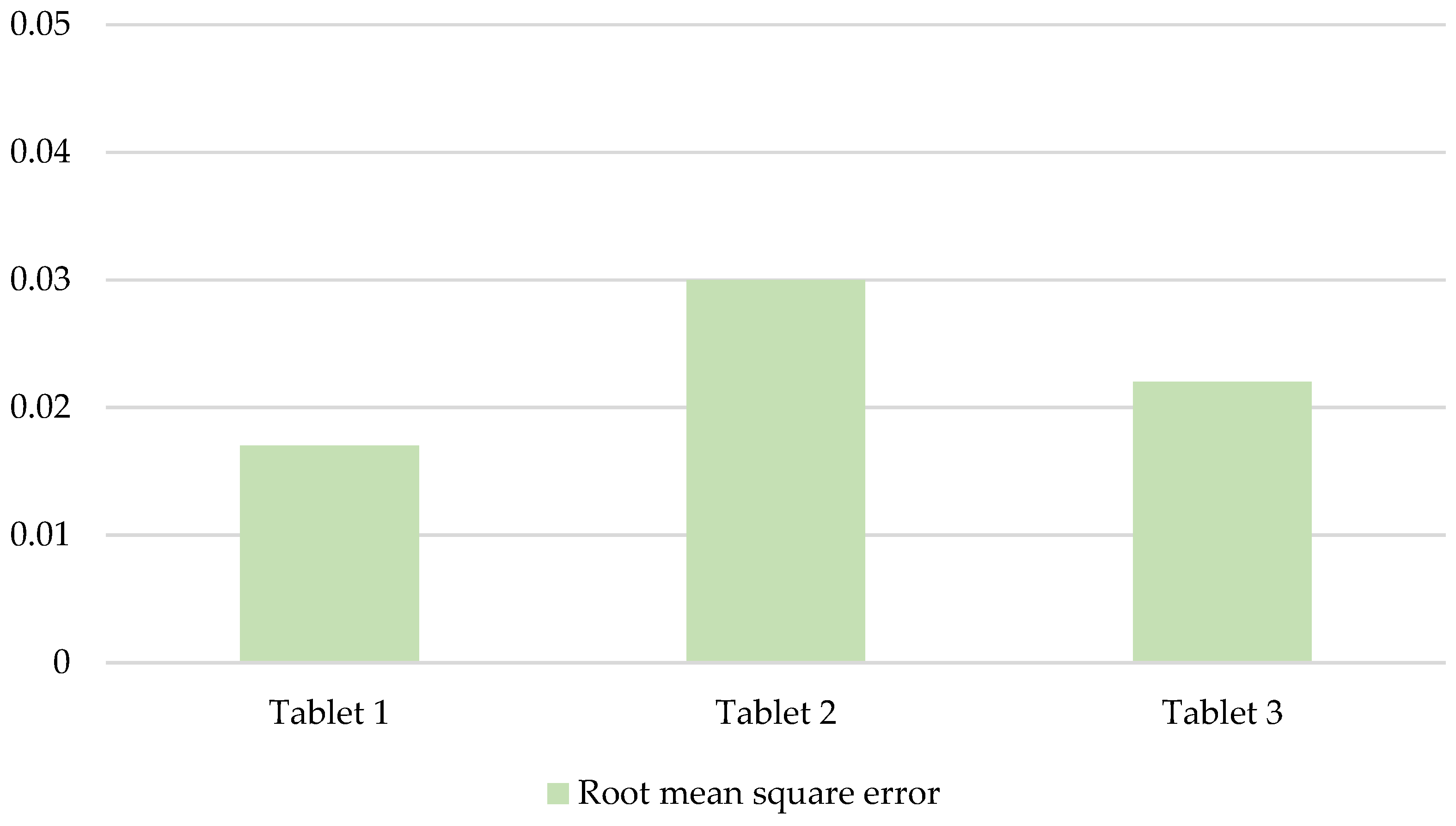
3.3. Post-Processing Analyses
4. Discussion
5. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Resilience Europen Project Website. Available online: https://www.resilience-ri.eu (accessed on 28 July 2023).
- Anderson, S.E.; Levoy, M. Unwrapping and visualizing cuneiform tablets. IEEE Comput. Graph. Appl. 2002, 22, 82–88. [Google Scholar] [CrossRef]
- Kotoula, E.; Akoglu, K.G.; Frahm, E.; Simon, S. QR Coded 3D Prints of Cuneiform Tablets. Int. J. Art Cult. Des. Technol. 2017, 6, 1–11. [Google Scholar] [CrossRef][Green Version]
- Homburg, T.; Zwick, R.; Mara, H.; Bruhn, K.-C. Annotated 3D-Models of Cuneiform Tablets. J. Open Archaeol. Data 2022, 10, 1–8. [Google Scholar] [CrossRef]
- Diara, F.; Rinaudo, F. ARK-BIM: Open-Source Cloud-Based HBIM Platform for Archaeology. Appl. Sci. 2021, 11, 8770. [Google Scholar] [CrossRef]
- Diara, F. HBIM Open Source: A Review. ISPRS Int. J. Geoinf. 2022, 11, 472. [Google Scholar] [CrossRef]
- Cohen, J.D.; Duncan, D.D.; Snyder, D.; Cooper, J.; Kumar, S.; Hahn, D.V.; Chen, Y.; Purnomo, B.; Graettinger, J. iClay: Dig-itizing Cuneiform. In Proceedings of the IEEE Conference on Visual Analytics Science and Technology, Norkköping, Sweden, 7 December 2004. [Google Scholar]
- Mara, S.H.; Krömker, S.; Breuckmann, J.-B. GigaMesh & Gilgamesh: 3D Multiscale Integral Invariant Cuneiform Character Extraction. In Proceedings of the VAST: International Symposium on Virtual Reality, Archaeology and Intelligent Cultural Heritage, The Eurographics Association, Paris, France, 21–24 September 2010. [Google Scholar] [CrossRef]
- Ch’Ng, E.; Woolley, S.I.; Hernandez-Munoz, L.; Collins, T.; Lewis, A.; Gehlken, E. The Development of a Collaborative Virtual Environment for 3D Reconstruction of Cuneiform Tablets. In Proceedings of the International Conference on Virtual Systems & Multimedia (VSMM), Hong Kong, China, 9–12 December 2014; pp. 35–42. [Google Scholar] [CrossRef]
- Fisseler, D.; Müller, G.G.W.; Weichert, F. Web-Based Scientific Exploration and Analysis of 3D Scanned Cuneiform Datasets for Collaborative Research. Informatics 2017, 4, 44. [Google Scholar] [CrossRef]
- Artec3D Website. Available online: https://www.artec3d.com (accessed on 28 July 2023).
- Willems, G.; Verbiest, F.; Moreau, W.; Hameeuw, H.; Van Lerberghe, K.; Van Gool, L. Easy and Cost-Effective Cuneiform Digitizing. In Proceedings of the 6th International Symposium on Virtual Reality, Archaeology and Cultural Heritage (VAST 2005), Pisa, Italy, 8–11 November 2005; Mudge, M., Ryan, N., Scopigno, R., Eds.; ACM: New Tork, NY, USA, 2005; pp. 73–80. [Google Scholar]
- Hameeuw, H.; Geert, W. New Visualization Techniques for Cuneiform Texts and Sealings. Akkadica 2011, 132, 163–178. [Google Scholar]
- Earl, G.; Martinez, K.; Malzbender, T. Archaeological applications of polynomial texture mapping: Analysis, conservation and representation. J. Archaeol. Sci. 2010, 37, 2040–2050. [Google Scholar] [CrossRef]
- Marengo, E.; Manfredi, M.; Zerbinati, O.; Robotti, E.; Mazzucco, E.; Gosetti, F.; Bearman, G.; France, F.; Shor, P. Technique Based on LED Multispectral Imaging and Multivariate Analysis for Monitoring the Conservation State of the Dead Sea Scrolls. Anal. Chem. 2011, 83, 6609–6618. [Google Scholar] [CrossRef]
- Ouimet, M. Ancient Cuneiform in the Digital Age: Curating the Oriental Institute’s Tablet Collection. In Proceedings of the University of Chicago Undergraduate Research Symposium, Online, 21 May 2021. [Google Scholar]
- Antinozzi, S.; Fiorillo, F.; Surdi, M. Cuneiform Tablets Micro-Surveying in an Optimized Photogrammetric Configuration. Heritage 2022, 5, 3133–3164. [Google Scholar] [CrossRef]
- Antinozzi, S.; Fiorillo, F. Optimized configurations for micro-photogrammetric surveying adaptable to macro optics and digital microscope. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 46, 25–32. [Google Scholar] [CrossRef]
- Georgopoulos, A.; Ioannidis, C.; Valanis, A. Assessing the performance of a structured light scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, XXXVIII, 5. [Google Scholar]
- Soile, S.; Adam, K.; Ioannidis, C.; Georgopoulos, A. Accurate 3D textured models of vessels for the improvement of the educational tools of a museum. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 211–217. [Google Scholar] [CrossRef]
- Mugnai, F.; Tucci, G.; Da Re, A. Digital image correlation in assessing structured-light 3D scanner’s gantry stability: Performing David’s (Michelangelo) high-accuracy 3D survey. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 46, 463–469. [Google Scholar] [CrossRef]
- Polo, M.E.; Cuartero, A.; Felicísimo, A.M. Study of uncertainty and repeatability in structured-light 3D scanners. Electrical Engineering and Systems Science. arXiv 2019, arXiv:1910.13199. [Google Scholar] [CrossRef]
- Eiríksson, E.R.; Wilm, J.; Pedersen, D.B.; Aanæs, H. Precision and accuracy parameters in structured light 3-D scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 40, 7–15. [Google Scholar] [CrossRef]
- Voisin, S.; Foufou, S.; Truchetet, F.; Page, D.L.; Abidi, M.A. Study of ambient light influence for three-dimensional scanners based on structured light. Opt. Eng. 2007, 46, 030502. [Google Scholar] [CrossRef]
- Schild, L.; Sasse, F.; Kaiser, J.-P.; Lanza, G. Assessing the optical configuration of a structured light scanner in metrological use. Meas. Sci. Technol. 2022, 33, 085018. [Google Scholar] [CrossRef]
- Dhillon, D.S.; Govindu, V.M. Geometric and radiometric estimation in a structured-light 3D scanner. Mach. Vis. Appl. 2015, 26, 339–352. [Google Scholar] [CrossRef]
- Latz, D.; Oezel, L.; Taday, R.; Gehrmann, S.V.; Windolf, J.; Schiffner, E. Defining the region of interest of the knee for perioperative volumetric assessment with a portable 3D scanner in orthopedic and trauma surgery. PLoS ONE 2022, 17, e0270371. [Google Scholar] [CrossRef]
- Somogyi, Á.J.; Lovas, T.; Szabó-Leone, Á.; Fehér, A. Steels Specimens’ Inspection with Structured Light Scanner. Period. Polytech. Civ. Eng. 2022, 66, 1241–1247. [Google Scholar] [CrossRef]
- Göldner, D.; Karakostis, F.A.; Falcucci, A. Practical and technical aspects for the 3D scanning of lithic artefacts using micro-computed tomography techniques and laser light scanners for subsequent geometric morphometric analysis. Introducing the StyroStone protocol. PLoS ONE 2022, 17, e0267163. [Google Scholar] [CrossRef] [PubMed]
- Marić, I.; Šiljeg, A.; Domazetović, F. Precision Assessment of Artec Space Spider 3D Handheld Scanner for Quantifying Tufa Formation Dynamics on Small Limestone Plates (PLs). In Proceedings of the 8th International Conference on Geographical Information Systems Theory, Applications and Management—GISTAM, Online, 27–29 April 2022; SciTePress: Vienna, Austria, 2022; pp. 67–74. [Google Scholar] [CrossRef]
- Kalinowski, P.; Hindmarch, J.; Luhmann, T. Accuracy investigations of hand-held scanning systems using different dumbbell artefacts. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 401–407. [Google Scholar] [CrossRef]
- Meshlab Web Site. Available online: https://www.meshlab.net/ (accessed on 28 July 2023).




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3D Scanner | 3D Accuracy | 3D Resolution | Acquisition Speed |
|---|---|---|---|
| Artec Micro | 0.01 mm | 0.029 mm | 1 mln points/s |
| Artec Space Spider | 0.05 mm | 0.1 mm | 1 mln points/s |
| 3D Scanner | Max. Error | Scans/Frames | Resolution | Polygons |
|---|---|---|---|---|
| Micro | 0.00 mm | 2/50 | 0.03 mm | 29,270,798 |
| Space Spider | 0.1 mm | 5/3526 | 0.08 mm | 4,003,584 |
| 3D Scanner | Max. Error | Scans/Frames | Resolution | Polygons |
|---|---|---|---|---|
| Micro | 0.00 mm | 6/96 | 0.03 mm | 10,457,596 |
| Space Spider | 0.1 mm | 4/3606 | 0.08 mm | 1,480,838 |
| 3D Scanner | Max. Error | Scans/Frames | Resolution | Polygons |
|---|---|---|---|---|
| Micro | 0.00 mm | 2/60 | 0.03 mm | 5,328,852 |
| Space Spider | 0.1 mm | 3/2221 | 0.08 mm | 1,322,622 |
| Lenticular Tablet | Rectangular Tablet | Squared Tablet | |
|---|---|---|---|
| Volume | 61,412.31 mm3 | 14,870.54 mm3 | 5,582.57 mm3 |
| 3D Scanner | Lenticular Tablet | Rectangular Tablet | Squared Tablet |
|---|---|---|---|
| Micro | 477 poly/mm3 | 703 poly/mm3 | 955 poly/mm3 |
| Space Spider | 65 poly/mm3 | 99 poly/mm3 | 237 poly/mm3 |
| ratio | 7.34 | 7.10 | 4.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diara, F. Structured-Light Scanning and Metrological Analysis for Archaeology: Quality Assessment of Artec 3D Solutions for Cuneiform Tablets. Heritage 2023, 6, 6016-6034. https://doi.org/10.3390/heritage6090317
Diara F. Structured-Light Scanning and Metrological Analysis for Archaeology: Quality Assessment of Artec 3D Solutions for Cuneiform Tablets. Heritage. 2023; 6(9):6016-6034. https://doi.org/10.3390/heritage6090317
Chicago/Turabian StyleDiara, Filippo. 2023. "Structured-Light Scanning and Metrological Analysis for Archaeology: Quality Assessment of Artec 3D Solutions for Cuneiform Tablets" Heritage 6, no. 9: 6016-6034. https://doi.org/10.3390/heritage6090317
APA StyleDiara, F. (2023). Structured-Light Scanning and Metrological Analysis for Archaeology: Quality Assessment of Artec 3D Solutions for Cuneiform Tablets. Heritage, 6(9), 6016-6034. https://doi.org/10.3390/heritage6090317