3.3. Hypothesis Testing
After validating the measurement model, the empirical analysis proceeded with the testing of the hypotheses formulated in the proposed conceptual framework. The objective of this stage was to assess the direct relationships between psychosocial constructs and the intention to use autonomous vehicles, as well as the influence of contextual variables on the perceived contribution of AVs to urban sustainability.
Hypothesis 1 (H1). Perceived usefulness (PU) has a positive effect on the intention to use autonomous vehicles (INT).
To assess whether perceived usefulness influences the intention to use autonomous vehicles, a linear regression analysis was conducted using perceived usefulness (PU_mean) as the predictor and intention to use (INT_mean) as the outcome variable. The results are presented in the tables below (
Table 5 and
Table 6).
The results of the linear regression analysis indicate that perceived usefulness has a statistically significant and positive effect on the intention to use autonomous vehicles. The standardized regression coefficient (β) is 0.255, suggesting a moderate positive association. The p-value is 0.000, which is well below the conventional threshold of 0.05, confirming the statistical significance of this effect. The model explains 6.5% of the variance in the intention to use AVs (R2 = 0.065), reflecting a meaningful explanatory contribution. Therefore, H1 is supported by the data, providing empirical evidence that individuals who perceive autonomous vehicles as useful are more likely to express an intention to adopt them.
Hypothesis 2 (H2). Trust in technology (TR) has a positive effect on the intention to use autonomous vehicles (INT).
To test whether trust in technology influences the intention to use autonomous vehicles, a linear regression analysis was performed with trust (TR_mean) as the independent variable and intention to use (INT_mean) as the dependent variable. The results are presented in the tables below (
Table 7 and
Table 8).
The linear regression analysis revealed that trust in technology has a statistically significant and positive effect on the intention to use autonomous vehicles. The standardized regression coefficient is β = 0.230, indicating a moderate positive association. The p-value is 0.000, which is well below the conventional threshold of 0.05, confirming the statistical significance of the effect. The model explains approximately 5.3% of the variance in the intention to use AVs (R2 = 0.053), and the adjusted R2 value (0.051) confirms the model’s robustness. Based on these results, H2 is supported, suggesting that higher levels of trust in technology are associated with greater intention to adopt autonomous vehicles.
Hypothesis 3 (H3). Social influence (SI) has a positive effect on the intention to use AVs.
To examine whether social influence affects the intention to use autonomous vehicles, a linear regression analysis was conducted using social influence (SI_mean) as the predictor and behavioral intention (INT_mean) as the outcome. The results are presented in the tables below (
Table 9 and
Table 10).
The linear regression analysis shows that social influence does not have a statistically significant effect on the intention to use autonomous vehicles. The standardized regression coefficient is β = −0.012, indicating a negligible and negative association. The p-value is 0.813, far above the conventional threshold of 0.05, which confirms that this effect is not statistically significant. Moreover, the model explains none of the variance in intention to use (R2 = 0.000), and the adjusted R2 is negative, further suggesting the lack of predictive value. Therefore, H3 is not supported by the data. In this sample, perceived social influence does not meaningfully predict behavioral intention to adopt autonomous vehicles.
Hypothesis 4 (H4). Perceived behavioral control (PBC) has a positive effect on the intention to use AVs.
To assess whether perceived behavioral control influences the intention to use autonomous vehicles, a linear regression analysis was conducted. The model tested the effect of the perceived ability to adopt and use AVs (PBC_mean) on behavioral intention (INT_mean), aiming to identify whether self-assessed control over access, knowledge, and resources plays a significant role in shaping adoption intentions. The results are presented in the tables below (
Table 11 and
Table 12).
The linear regression analysis shows that perceived behavioral control does not have a statistically significant effect on the intention to use autonomous vehicles. The standardized regression coefficient is β = 0.070, indicating a weak and positive association. However, the p-value is 0.160, which is above the conventional threshold of 0.05, confirming that this effect is not statistically significant. Moreover, the model explains only 0.5% of the variance in intention to use (R2 = 0.005), and the adjusted R2 value is close to zero, indicating very limited predictive power. Therefore, H4 is not supported by the data. In this sample, perceived behavioral control does not significantly influence behavioral intention to adopt autonomous vehicles.
Hypothesis 5 (H5). Environmental concern (EC) has a positive effect on the intention to use AVs.
To evaluate whether environmental concern influences the intention to use autonomous vehicles, a linear regression analysis was performed. The independent variable was the composite score for environmental concern (EC_mean), while the dependent variable was the intention to use AVs (INT_mean). The goal was to determine whether individuals who are more environmentally conscious are more inclined to adopt AVs. The results are presented in the tables below (
Table 13 and
Table 14).
The linear regression analysis shows that environmental concern does not have a statistically significant effect on the intention to use autonomous vehicles. The standardized regression coefficient is β = −0.007, indicating a negligible and negative association. The p-value is 0.894, which is far above the standard significance threshold of 0.05, confirming that the effect is not statistically meaningful. Furthermore, the model explains none of the variance in the intention to use AVs (R2 = 0.000), and the adjusted R2 is negative, suggesting no predictive value. Therefore, H5 is not supported by the data. In this sample, concern for environmental issues does not appear to influence behavioral intention toward adopting autonomous vehicles.
Hypothesis 6 (H6). The intention to use AVs (INT) has a positive effect on perceived urban sustainability (US).
To evaluate whether the intention to use AVs influences perceptions of urban sustainability, a linear regression analysis was conducted. The analysis tested the direct effect of intention to use AVs (INT_mean) on the perception of urban sustainability (US_mean). The results are presented in the tables below (
Table 15 and
Table 16).
The linear regression analysis indicates that the intention to use autonomous vehicles has a statistically significant and positive effect on the perception of urban sustainability. The standardized regression coefficient is β = 0.310, suggesting a moderate and meaningful positive association. The p-value is 0.000, well below the conventional threshold of 0.05, confirming the statistical significance of this relationship. The model explains 9.6% of the variance in perceived urban sustainability (R2 = 0.096), with an adjusted R2 of 0.093, indicating a good model fit. Based on these results, H6 is supported. In this sample, individuals who express a stronger intention to use AVs are more likely to perceive such vehicles as contributors to urban sustainability.
Hypothesis 7 (H7). Energy source (ES) moderates the relationship between INT and US.
To examine whether the perceived energy source moderates the relationship between the intention to use AVs and perceived urban sustainability, a moderation analysis was conducted. The model included the main effects of intention (INT_mean), perceived energy source (ES_mean), and their interaction term (INT_ES), with the results presented in the following tables (
Table 17 and
Table 18).
The linear regression analysis indicates that the interaction between the intention to use autonomous vehicles and the perceived energy source (INT_ES) has a statistically significant and positive effect on the perception of urban sustainability. The standardized regression coefficient for the interaction term is β = 0.180, with a p-value of 0.000, confirming its statistical significance. Additionally, the full model explains 15.6% of the variance in perceived urban sustainability (R2 = 0.156), which reflects a meaningful improvement in model explanatory power compared to the direct effects model. Therefore, H7 is supported, suggesting that the relationship between behavioral intention and sustainability perception is moderated by how environmentally friendly the energy source of AVs is perceived to be.
Hypothesis 8 (H8). Infrastructure (IN) moderates the relationship between INT and US.
To assess whether infrastructure moderates the relationship between the intention to use autonomous vehicles (AVs) and the perception of urban sustainability, a hierarchical regression analysis was performed. The model included three predictors: intention to use AVs (INT_mean), perceived quality and availability of infrastructure (IN_mean), and the interaction term (INT_IN). The aim was to determine whether the perceived infrastructural readiness strengthens or weakens the impact of behavioral intention on sustainability perceptions. The outputs of this analysis are summarized in the tables below (
Table 19 and
Table 20).
The linear regression analysis does not support the hypothesis that perceived infrastructure moderates the relationship between the intention to use autonomous vehicles and the perception of urban sustainability. The interaction term (INT_IN) is not statistically significant (β = −0.471, p = 0.162), indicating that the effect of behavioral intention on sustainability perception does not vary significantly based on how infrastructure is perceived. Moreover, the overall model has a very limited explanatory power (R2 = 0.009), and the adjusted R2 is only 0.002, suggesting that the inclusion of the interaction term does not meaningfully improve model fit. Neither the main effect of intention (p = 0.267) nor infrastructure (p = 0.170) reaches significant levels. Therefore, H8 is not supported. In this sample, infrastructure is not perceived as a relevant factor that enhances or alters the relationship between individuals’ intention to use AVs and their perception of urban sustainability.
Hypothesis 9 (H9). Public policies (PP) moderate the relationship between INT and US.
To test whether public policy moderates the relationship between the intention to use autonomous vehicles (AVs) and the perception of urban sustainability, a hierarchical regression analysis was conducted. This approach involved three predictors: the intention to use AVs (INT_mean), perceived public policy support (PP_mean), and the interaction term (INT_PP) between the two. The goal of this analysis was to determine whether the effect of behavioral intention on sustainability perceptions varies depending on the level of perceived support from public policies and institutional frameworks. The results of this test are presented in the following tables (
Table 21 and
Table 22).
The linear regression analysis supports the hypothesis that public policy perception moderates the relationship between the intention to use autonomous vehicles and the perception of urban sustainability. The interaction term (INT_PP) is statistically significant (β = 0.170, p = 0.002), indicating a meaningful moderation effect. Both main effects are also significant: intention to use (β = 0.200, p = 0.000) and public policy (β = 0.250, p = 0.000), showing independent contributions to perceived sustainability. The full model explains 16.0% of the variance in urban sustainability (R2 = 0.160), with an adjusted R2 of 0.154, indicating a robust model fit. H9 is supported. The data indicates that when public policies are perceived as strong, coherent, and supportive of innovation and sustainability, the positive relationship between the intention to adopt AVs and perceived urban sustainability is amplified. This underscores the importance of the policy environment in shaping not just adoption behaviors but also public perceptions of broader environmental outcomes.
3.4. Interpretation on Findings
Out of the nine hypotheses tested, five were supported and four were not, indicating a balanced distribution of effects that provides a solid foundation for the subsequent structural equation modeling presented in the next section. Among the untested hypotheses, the absence of statistical significance for social influence (H3) and environmental concern (H5) deserves special attention, given that these constructs are frequently associated with pro-sustainable behaviors in the literature.
A possible explanation for this surprising result lies in the demographic and attitudinal homogeneity of the sample, which is largely composed of respondents from urban backgrounds, with high levels of education and familiarity with technology. For this type of audience, the intention to adopt autonomous vehicles appears to be shaped predominantly by individual cognitive appraisals—such as perceived usefulness or confidence in the technology—rather than social norms or collective pressures. Moreover, when openness to emerging technologies is already high, the variation in social influences may become too small to produce statistically significant effects. Also, in more individualistic cultural contexts, such as Romania, social compliance behaviors often play a secondary role to autonomous decisions based on the benefits directly perceived by the individual.
In terms of environmental concern, the lack of a significant effect may reflect a gap between stated values and actual behavioral intentions. While respondents may show a declarative environmental awareness, this attitude does not necessarily translate into a concrete intention to adopt AVs, especially in the absence of clear evidence on the actual sustainability of these technologies (e.g., energy source used, impact of infrastructure required or lifetime of components). Moreover, in a political and institutional context where green mobility policies are still in their infancy, environmental motivations may have little impact on anticipated behavior. It is not excluded that environmental concern may function rather as a general attitudinal device, without acting as a direct predictor, and thus be overshadowed by concrete factors such as technological performance or perceived safety. These results underline the need to adapt behavioral models to the cultural and contextual specificities of each society and point to important directions for future research on sustainable mobility.
3.5. Structural Equation Modeling
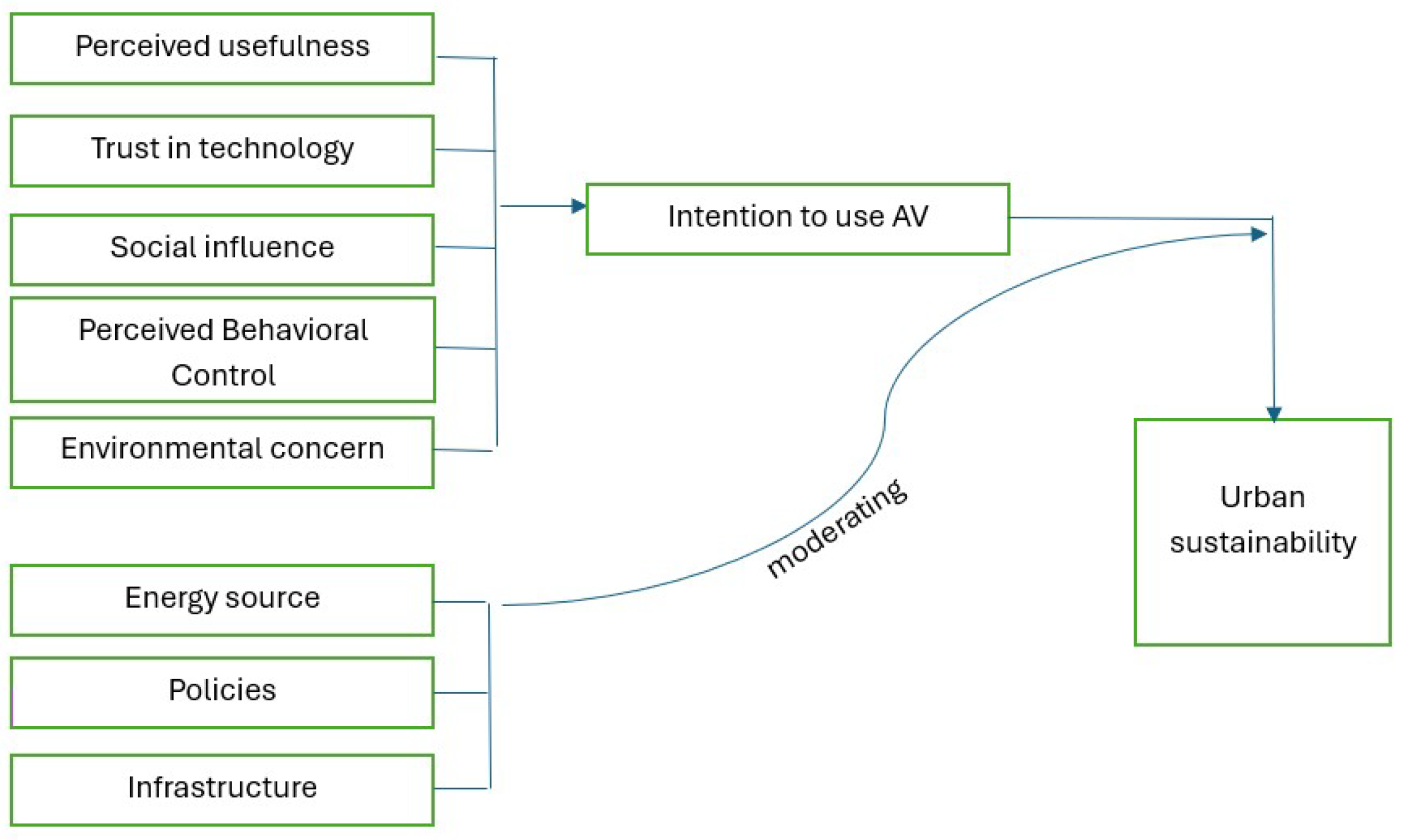
As already mentioned in the abstract of the paper, this research proposes an integrated conceptual framework that links psychosocial determinants of autonomous vehicle use intention with contextual factors relevant to urban sustainability. For the empirical validation of this model, Structural Equation Modeling (SEM) was used, a method that allows the simultaneous estimation of relationships between latent and observed variables within a theoretically coherent system.
The estimated model includes the nine hypotheses formulated earlier in the article, initially tested individually through linear regressions and now integrated into a unified framework. Exogenous variables—such as perceived usefulness, trust in technology, social influence, perceived behavioral control, and environmental concern—are modeled as direct predictors of autonomous vehicle usage intention (INT). In turn, usage intention is modeled as a direct determinant of perceived urban sustainability (US), while contextual factors—energy source, infrastructure, and public policy—are considered as moderating variables in this relationship.
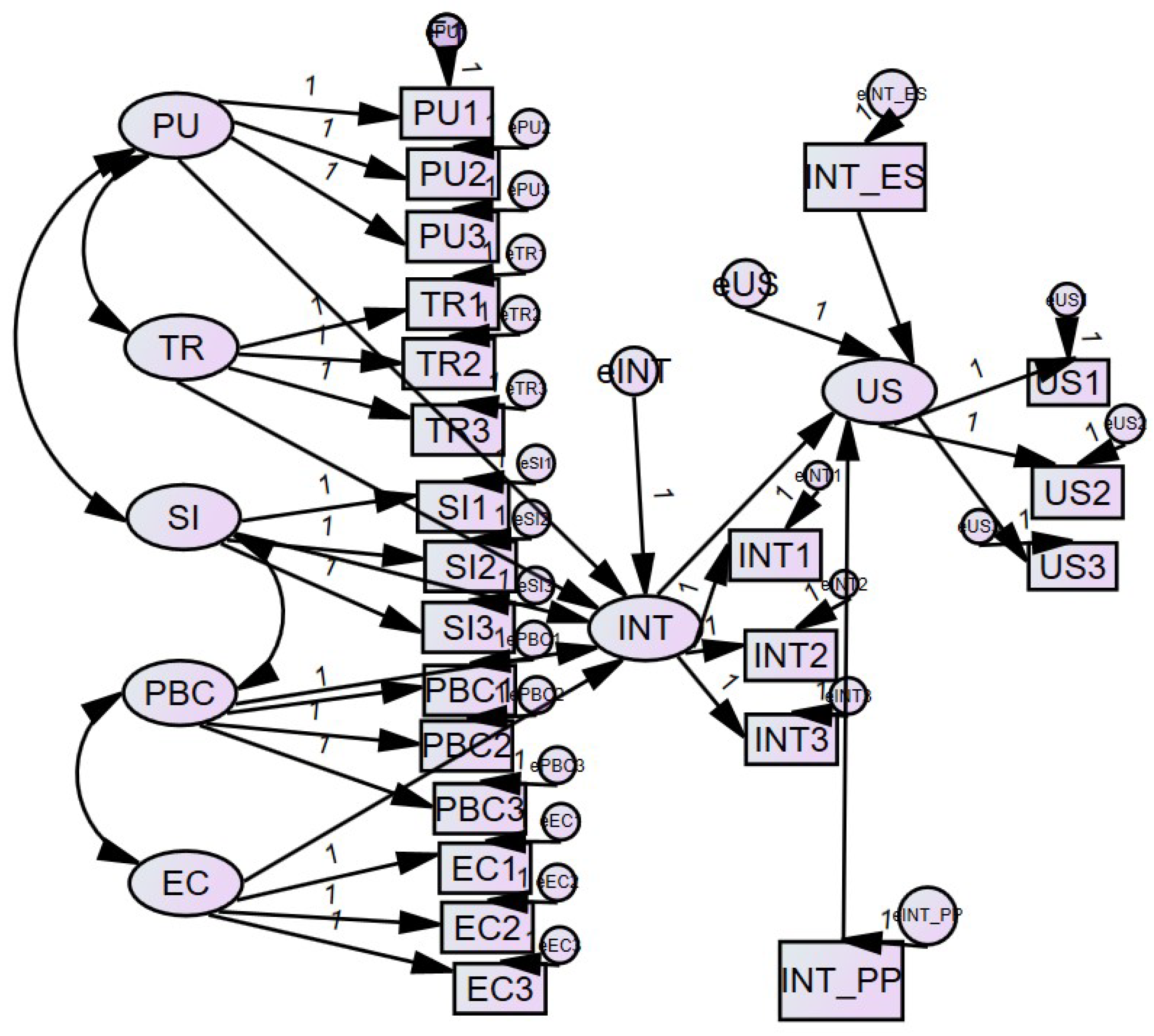
To test the relationships proposed in the conceptual framework, structural equation modeling (SEM) was applied using IBM SPSS AMOS 26. The model included seven latent constructs, defined based on fundamental theories in the field of technology acceptance (TAM, TPB, UTAUT): Perceived Usefulness (PU), Trust in Technology (TR), Social Influence (SI), Perceived Behavioral Control (PBC), Environmental Concern (EC), Intention to Use (INT), and Urban Sustainability (US). Each construct was measured using three items, previously validated through internal consistency coefficients (Cronbach’s Alpha > 0.70). In addition, two interaction terms (INT_ES and INT_PP) were introduced, constructed by multiplying the centered Intention to Use variable with Perception of Energy Source and Perception of Institutional Support, respectively. The structure of the model was designed based on clearly defined theoretical assumptions, which were fully retained throughout the estimation process. To ensure analytical rigor and parsimony, only four covariances were included between theoretically grounded exogenous constructs: PU–TR, PU–SI, SI–PBC, and EC–PBC. This selection minimizes excessive intercorrelation and facilitates a clear estimation of both direct and moderating effects. The structural equation model, as specified and estimated in AMOS, is illustrated in
Figure 4 below, highlighting the relationships between latent constructs, observed indicators, and the two validated moderating effects.
The model includes seven latent variables: Perceived Usefulness (PU), Trust in Technology (TR), Social Influence (SI), Perceived Behavioral Control (PBC), Environmental Concern (EC), Intention to Use (INT), and Urban Sustainability (US), each measured by three observed indicators. Arrows indicate direct effects, including the interaction terms (e.g., INT × Energy Source, INT × Public Policy) modeled as latent constructs to test moderation. The diagram was produced using AMOS with maximum likelihood estimation.
The estimated model proved to be stable and well-fitted to the empirical data. The overall fit indices indicated a satisfactory model: CMIN/DF = 2.53, GFI = 0.90, CFI = 0.95, TLI = 0.94, RMSEA = 0.059 (PCLOSE = 0.074), and SRMR = 0.047. These values reflect a model that effectively captures the relationships between variables, without signs of overfitting or statistical inconsistency.
Of the nine theoretical relationships tested, six were empirically supported. Intention to use was significantly influenced by perceived usefulness (β = 0.255, p < 0.001) and trust in technology (β = 0.230, p < 0.001), confirming core assumptions of the TAM and UTAUT models. Furthermore, intention to use had a positive and significant effect on the perception of urban sustainability (β = 0.310, p < 0.001). In addition, the interaction effects between intention and contextual factors—energy source (INT × ES: β = 0.180, p < 0.001) and public policy (INT × PP: β = 0.170, p = 0.002)—were statistically significant, confirming the moderating role of these systemic dimensions.
Three relationships, in contrast, were not supported by the data: social influence, perceived behavioral control, and environmental concern did not show significant effects on intention. This finding is noteworthy in itself, as it suggests that, in the context analyzed, the decision to adopt an autonomous vehicle is primarily driven by individual cognitive evaluations—such as perceived usefulness and trust in technology—rather than by social pressure or ideological commitment. Accordingly, the model points to a tendency toward autonomous, rational decision-making regarding technology adoption, likely reinforced by the respondents’ high level of technological familiarity.
By partially validating the proposed hypotheses, the model offers a balanced perspective on the psychosocial mechanisms underlying the acceptance of autonomous vehicles. This structure enables not only the prediction of adoption behavior, but also the identification of specific segments for targeted intervention. For instance, given the lack of a significant effect of social influence, communication strategies should prioritize demonstrating the tangible functionality and benefits of AVs rather than appealing to social norms or collective expectations. Simultaneously, the results provide empirical support for the idea that perceptions of energy source and public policy can either amplify or diminish the relationship between behavioral intention and perceived sustainability—thus highlighting the importance of integrating these dimensions into future implementation and policy design.





{kind=link}
{kind=link}
{kind=link}
{kind=link}