

Spatiotemporal Modeling of Soil Water Dynamics for Site-Specific Variable Rate Irrigation in Maize

 , ,
, ,  ,
,  , , and
, , and 
Abstract

1. Introduction
2. Materials and Methods
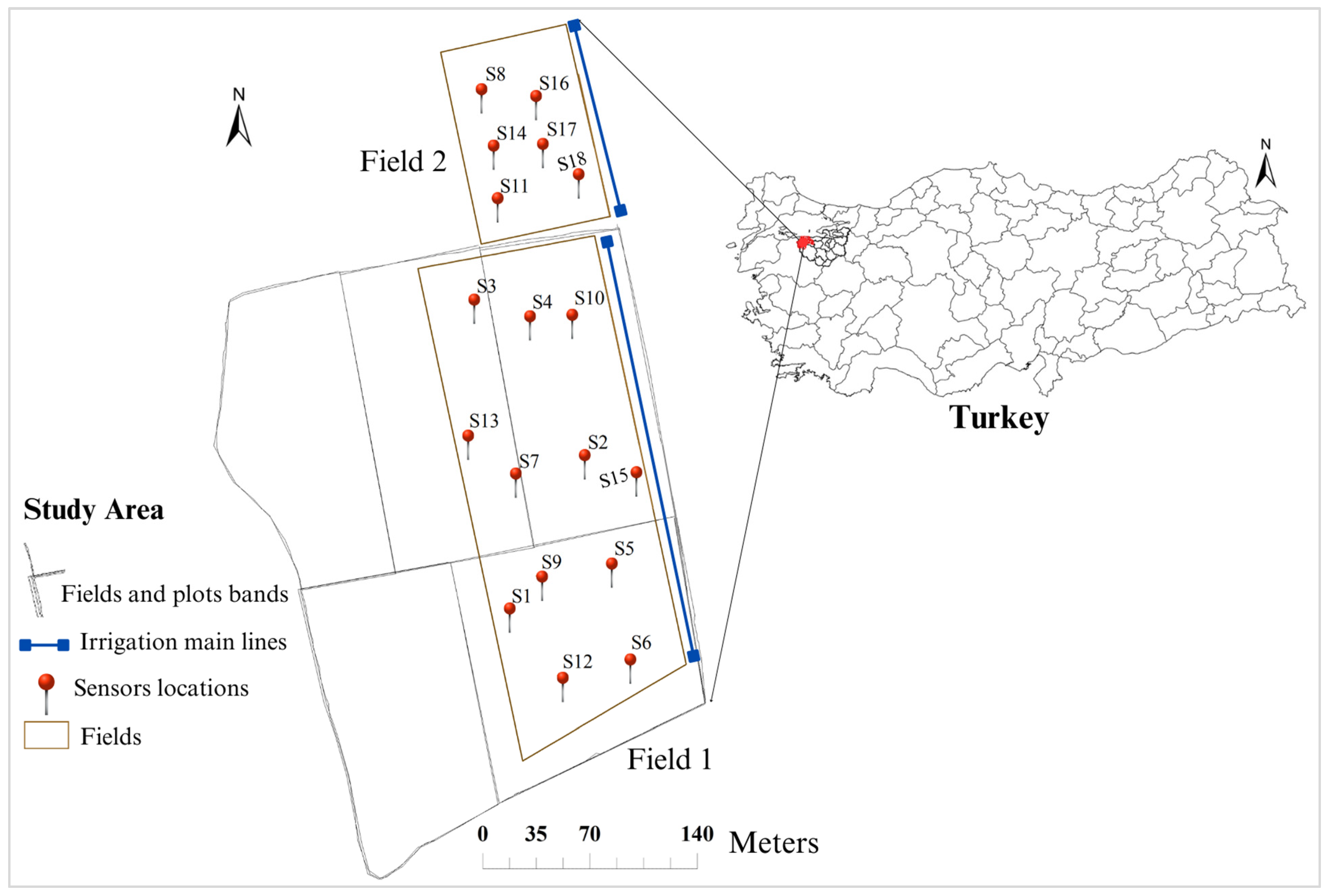
2.1. Site and Irrigation System
2.2. Wireless Soil Moisture Sensor System
2.3. Methods
2.3.1. Water Use Comparison between User- and Sensor-Based Constant Irrigation Rates
2.3.2. Variable Rate Irrigation Recommendations
3. Results and Discussion
3.1. User-Rate and Sensor-Based Constant Irrigation Comparisons
3.2. Constant vs. Variable Rate Irrigation
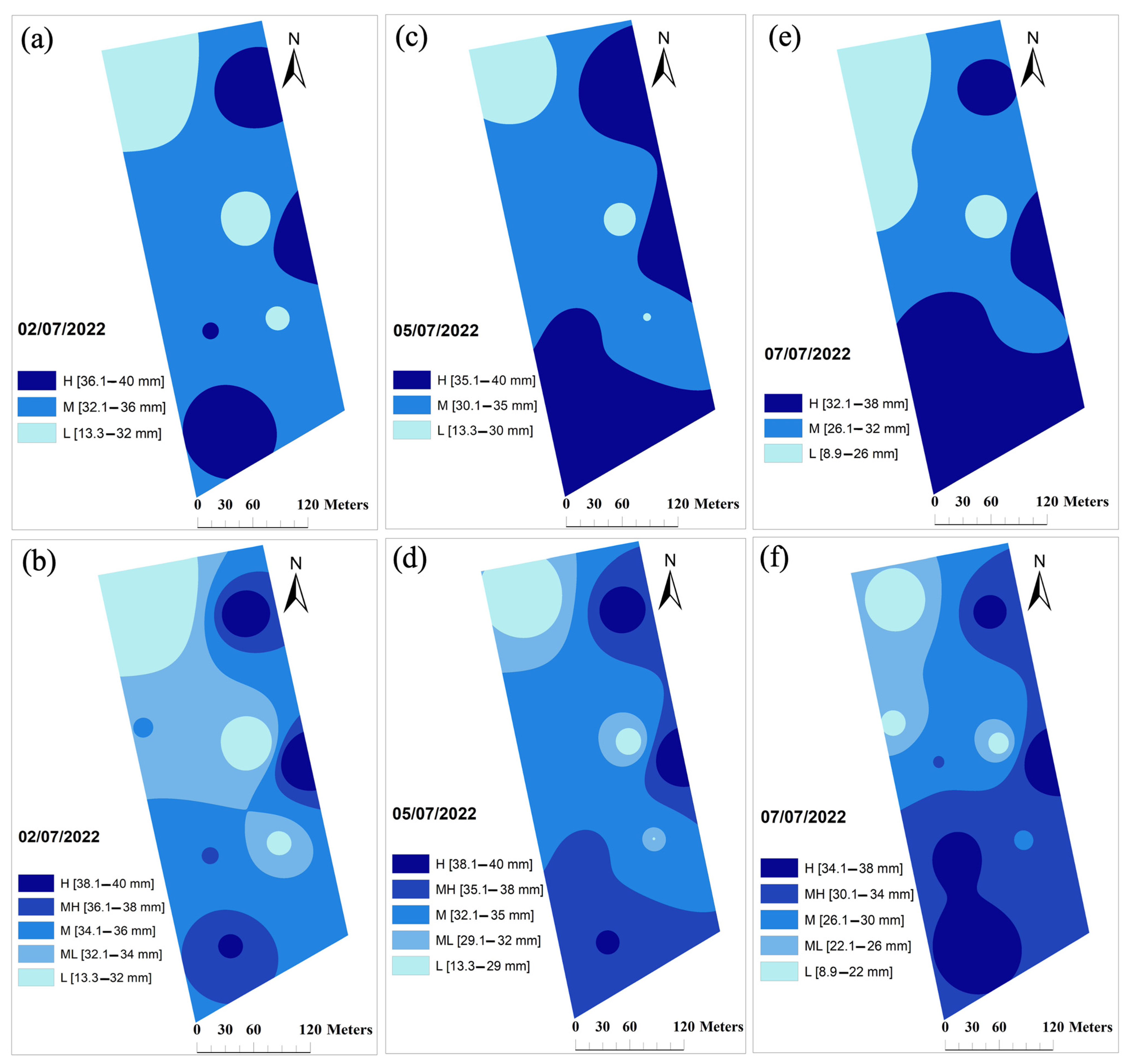
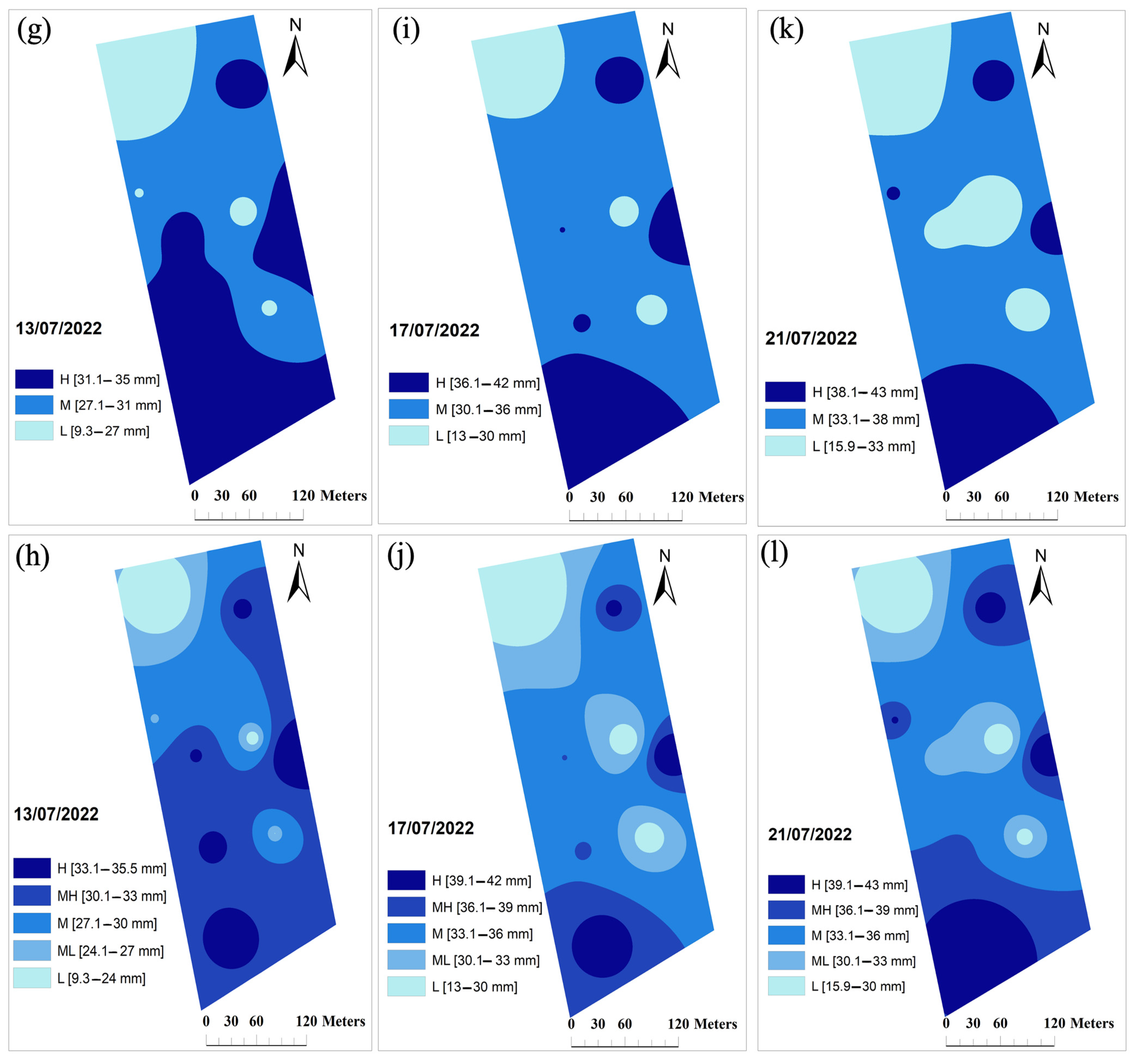
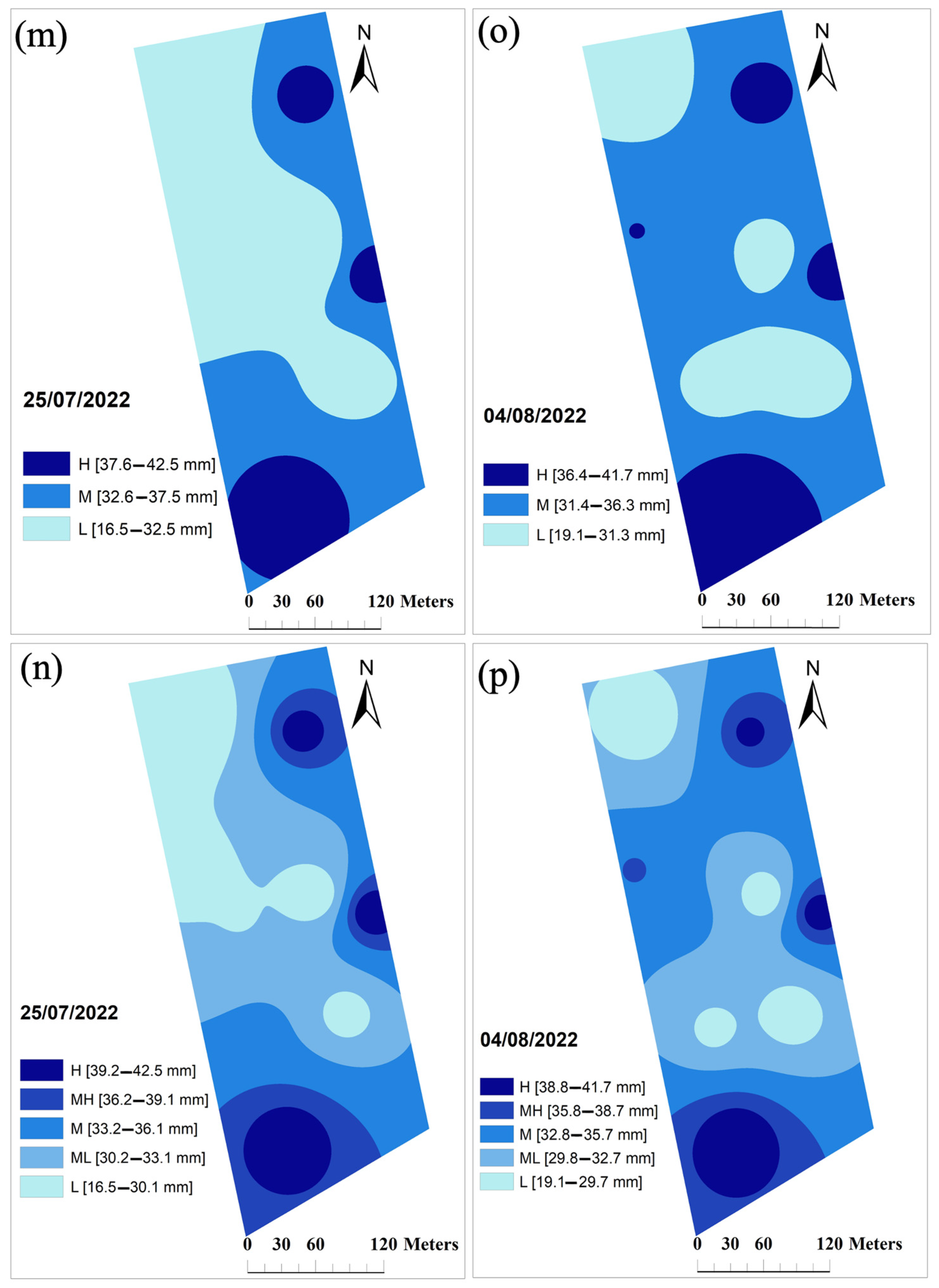
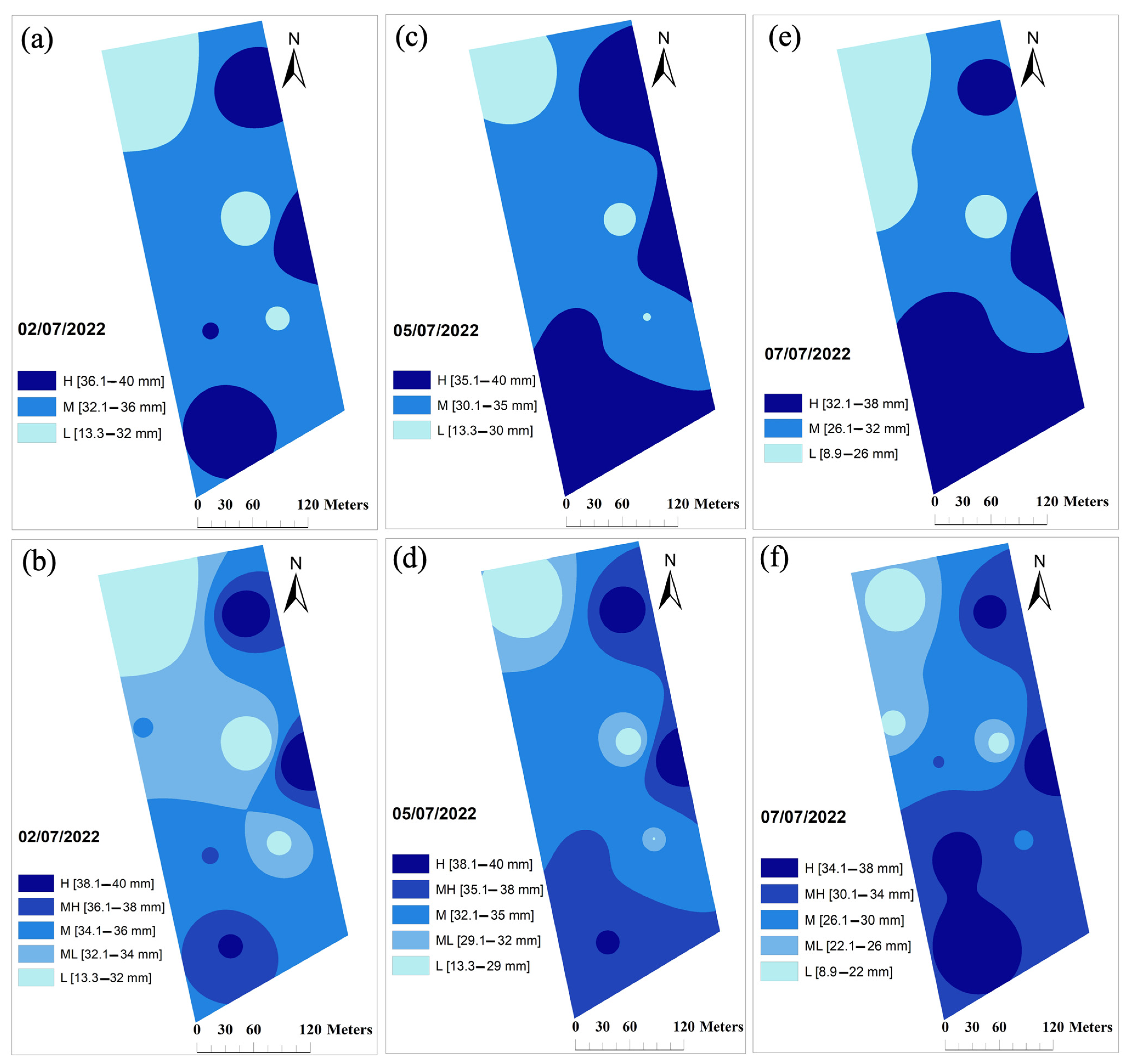
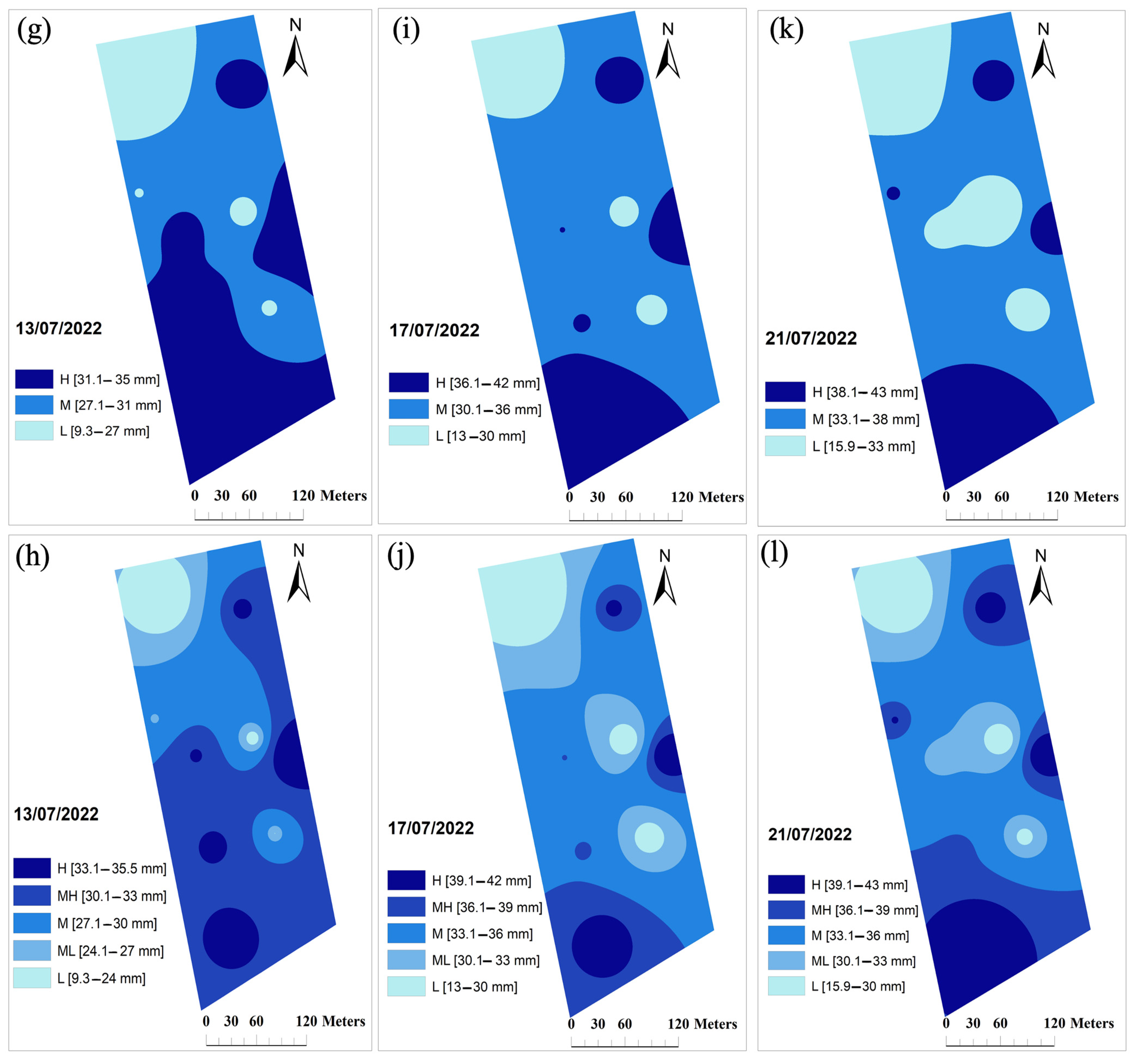
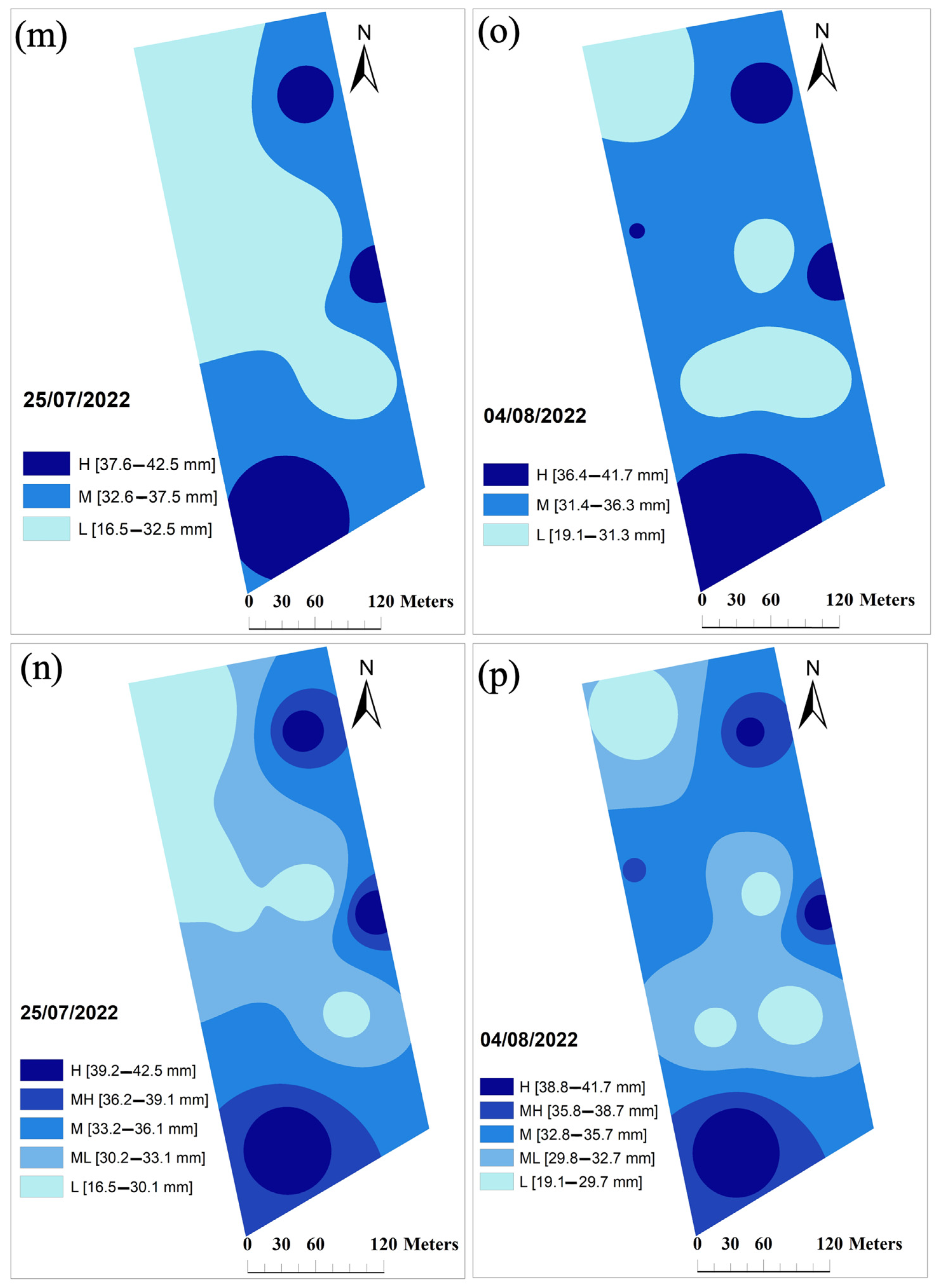
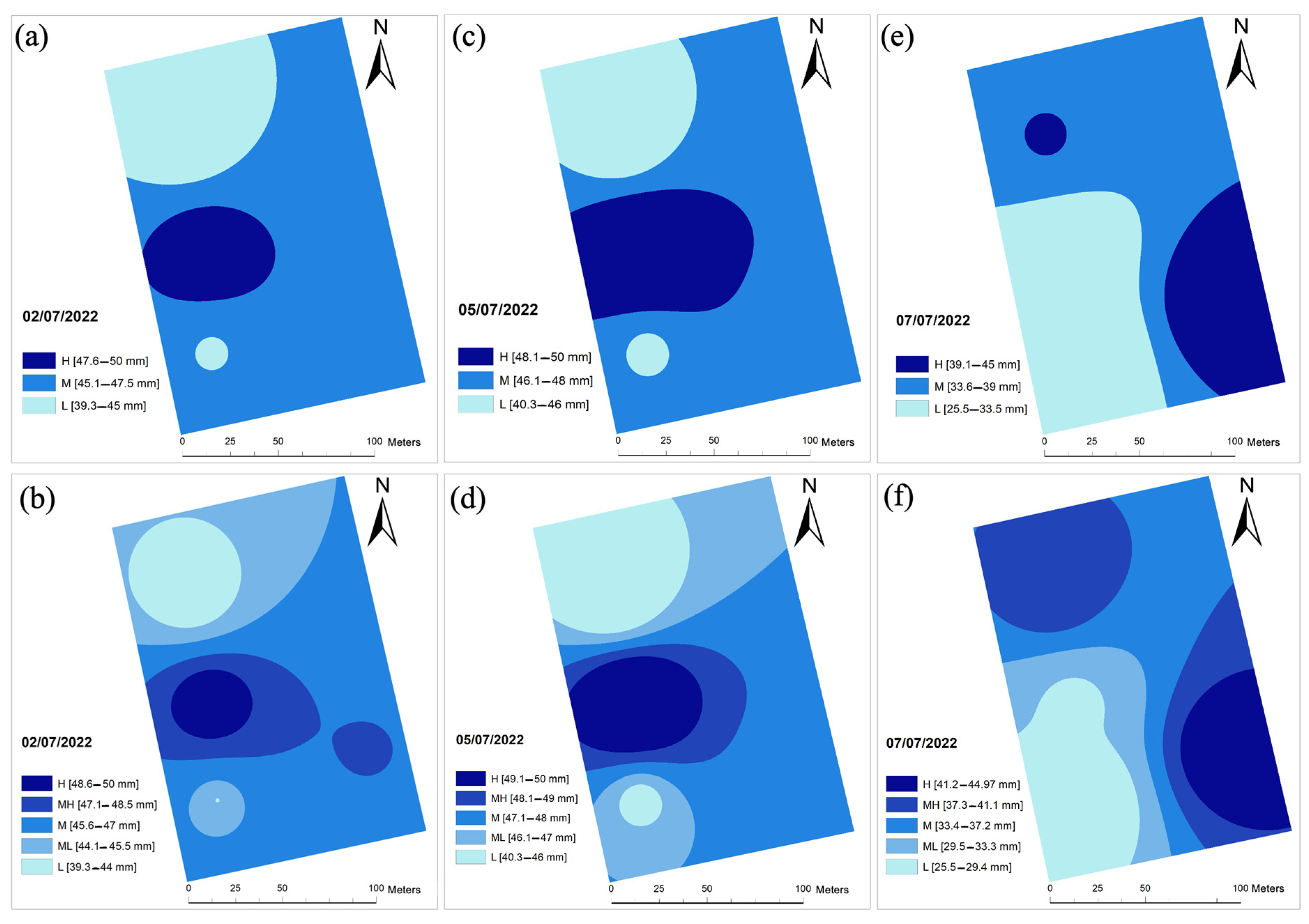
3.3. VRI Maps for Hose Reel Irrigation Machine
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kalboussi, N.; Biard, Y.; Pradeleix, L.; Rapaport, A.; Sinfort, C.; Ait-Mouheb, N. Life cycle assessment as decision support tool for water reuse in agriculture irrigation. Sci. Total Environ. 2022, 836, 155486. [Google Scholar] [CrossRef]
- Mrinmayi, G.; Bhagyashri, D.; Atul, V. A Smart Irrigation System for Agriculture Based on Wireless Sensors. Int. J. Innov. Res. Sci. Eng. Technol. 2016, 5, 6893–6899. [Google Scholar]
- Gu, Z.; Qi, Z.; Burghate, R.; Yuan, S.; Jiao, X.; Xu, J. Irrigation scheduling approaches and applications: A review. J. Irrig. Drain. Eng. 2020, 146, 04020007. [Google Scholar] [CrossRef]
- Plaščak, I.; Jurišić, M.; Radočaj, D.; Vujić, M.; Zimmer, D. An overview of precision irrigation systems used in agriculture. Teh. Glas. 2021, 15, 546–553. [Google Scholar] [CrossRef]
- Zhang, H.; He, L.; Di Gioia, F.; Choi, D.; Elia, A.; Heinemann, P. LoRaWAN based internet of things (IoT) system for precision irrigation in plasticulture fresh-market tomato. Smart Agric. Technol. 2022, 2, 100053. [Google Scholar] [CrossRef]
- Davcev, D.; Mitreski, K.; Trajkovic, S.; Nikolovski, V.; Koteli, N. IoT agriculture system based on LoRaWAN. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar]
- Zhang, Y.; Chen, D.; Wang, S.; Tian, L. A promising trend for field information collection: An air-ground multi-sensor monitoring system. Inf. Process. Agric. 2018, 5, 224–233. [Google Scholar] [CrossRef]
- Haule, J.; Michael, K. Deployment of wireless sensor networks (WSN) in automated irrigation management and scheduling systems: A review. In Proceedings of the 2nd Pan African International Conference on Science, Computing and Telecommunications (PACT 2014), Arusha, Tanzania, 14–18 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 86–91. [Google Scholar]
- Hamami, L.; Nassereddine, B. Application of wireless sensor networks in the field of irrigation: A review. Comput. Electron. Agric. 2020, 179, 105782. [Google Scholar] [CrossRef]
- Farooq, M.S.; Riaz, S.; Abid, A.; Umer, T.; Zikria, Y.B. Role of IoT technology in agriculture: A systematic literature review. Electronics 2020, 9, 319. [Google Scholar] [CrossRef]
- Poblete-Echeverría, C.; Fuentes, S. Special Issue “Emerging Sensor Technology in Agriculture”. Sensors 2020, 20, 3827. [Google Scholar] [CrossRef]
- Kumar, S.A.; Ilango, P. The impact of wireless sensor network in the field of precision agriculture: A review. Wirel. Pers. Commun. 2018, 98, 685–698. [Google Scholar] [CrossRef]
- Jaynes, D.B.; Colvin, T.S. Spatiotemporal variability of corn and soybean yield. Agron. J. 1997, 89, 30–37. [Google Scholar] [CrossRef]
- McBratney, A.X.; Whelan, B.M.; Shatar, T.M. Variability and uncertainty in spatial, temporal and spatiotemporal crop-yield and related data. In Ciba Foundation Symposium 210-Precision Agriculture: Spatial and Temporal Variability of Environmental Quality; John Wiley & Sons, Ltd.: Chichester, UK, 2007; pp. 141–160. [Google Scholar]
- Cao, J.; Leng, G.; Yang, P.; Zhou, Q.; Wu, W. Variability in Crop Response to Spatiotemporal Variation in Climate in China, 1980–2014. Land 2022, 11, 1152. [Google Scholar] [CrossRef]
- Ali, A.; Martelli, R.; Scudiero, E.; Lupia, F.; Falsone, G.; Rondelli, V.; Barbanti, L. Soil and climate factors drive spatio-temporal variability of arable crop yields under uniform management in Northern Italy. Arch. Agron. Soil Sci. 2023, 69, 75–89. [Google Scholar] [CrossRef]
- O’Shaughnessy, S.A.; Evett, S.R.; Colaizzi, P.D.; Andrade, M.A.; Marek, T.H.; Heeren, D.M.; LaRue, J.L. Identifying advantages and disadvantages of variable rate irrigation: An updated review. Appl. Eng. Agric. 2019, 35, 837–852. [Google Scholar] [CrossRef]
- Perry, C.; Podcknee, S. Development of a Variable-Rate Pivot Irrigation Control System. In Proceedings of the 2003 Georgia Water Resources Conference at the University of Georgia, Athens, GA, USA, 23–24 April 2003. [Google Scholar]
- Vellidis, G.; Liakos, V.; Porter, W.; Tucker, M.; Liang, X. A Dynamic Variable Rate Irrigation Control System. In Proceedings of the 13th International Conference on Precision Agriculture, St. Louis, MO, USA, 31 July–4 August 2016. [Google Scholar]
- Aleotti, J.; Amoretti, M.; Nicoli, A.; Caselli, S. A Smart Precision-Agriculture Platform for Linear Irrigation Systems. In Proceedings of the 2018 26th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 13–15 September 2018; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- David, H.; Rakesh, V.S. Smart Irrigation Management System Using Lora Wan Based Sensor Nodes. Int. J. Appl. Eng. Res. 2020, 15, 2020. [Google Scholar]
- Sharifnasab, H.; Mahrokh, A.; Dehghanisanij, H.; Łazuka, E.; Łagód, G.; Karami, H. Evaluating the Use of Intelligent Irrigation Systems Based on the IoT in Grain Corn Irrigation. Water 2023, 15, 1394. [Google Scholar] [CrossRef]
- Briciu-Burghina, C.; Zhou, J.; Ali, M.I.; Regan, F. Demonstrating the potential of a low-cost soil moisture sensor network. Sensors 2020, 22, 987. [Google Scholar] [CrossRef]
- Hossain, F.F.; Messenger, R.; Captain, G.L.; Ekin, S.; Jacob, J.D.; Taghvaeian, S.; O’Hara, J.F. Soil moisture monitoring through UAS-assisted internet of things LoRaWAN wireless underground sensors. IEEE Access 2022, 10, 102107–102118. [Google Scholar] [CrossRef]
- Froiz-Míguez, I.; Lopez-Iturri, P.; Fraga-Lamas, P.; Celaya-Echarri, M.; Blanco-Novoa, Ó.; Azpilicueta, L.; Fernández-Caramés, T.M. Design, implementation, and empirical validation of an IoT smart irrigation system for fog computing applications based on Lora and Lorawan sensor nodes. Sensors 2020, 20, 6865. [Google Scholar] [CrossRef]
- Sánchez-Sutil, F.; Cano-Ortega, A. Smart control and energy efficiency in irrigation systems using LoRaWAN. Sensors 2021, 21, 7041. [Google Scholar] [CrossRef] [PubMed]
- Krishnan, S.R.; Nallakaruppan, M.K.; Chengoden, R.; Koppu, S.; Iyapparaja, M.; Sadhasivam, J.; Sethuraman, S. Smart Water Resource Management Using Artificial Intelligence—A Review. Sustainability 2022, 14, 13384. [Google Scholar] [CrossRef]
- Turker, U.; Erdem, T.; Tagarakis, A.; Fountas, S.; Mitev, G.; Akdemir, B.; Gemtos, T.A. A Feasibility Study of Variable Rate Irrigation in Black Sea Area: Water and Energy Saving from the Application. J. Inf. Technol. Agric. 2011, 4, 1–6. [Google Scholar]
- Liang, Z.; Liu, X.; Xiao, J.; Liu, C. Review of conceptual and systematic progress of precision irrigation. Int. J. Agric. Biol. Eng. 2021, 14, 20–31. [Google Scholar] [CrossRef]
- Yabacı, S.H. Variable Rate Irrigation System Developing on Hose Reel Type Irrigation Systems. Ph.D. Thesis, Tekirdağ Namık Kemal University, Tekirdağ, Türkiye, 2022. (In Turkish). [Google Scholar]
- Awawda, J.; Ishaq, I. IoT Smart Irrigation System for Precision Agriculture. In Intelligent Sustainable Systems: Selected Papers of WorldS4 2022; Springer Nature: Singapore, 2023; Volume 2, pp. 335–346. [Google Scholar]
- Gundim, A.D.S.; Melo, V.G.M.L.D.; Coelho, R.D.; Silva, J.P.D.; Rocha, M.P.A.D.; França, A.C.F.; Conceição, A.M.P.D. Precision irrigation trends and perspectives: A review. Ciência Rural 2023, 53, 8. [Google Scholar] [CrossRef]
- Bantchina, B.B.; Mucan, U.; Gündoğdu, K.S. Land availability analysis in Bursa using Geographic Information Systems. In Proceedings Book, Proceedings of the 5th International Participation Soil and Water Resources Congress, Kırklareli, Turkey, 12–15 September 2017; Atatürk Soil Water and Agricultural Meteorology Research Institute Kırklareli: Merkez, Turkey, 2017; Volume 1, pp. 65–74. [Google Scholar]
- Dragino LSE01-LoRaWAN Soil Moisture & EC Sensor User Manual. Available online: https://www.dragino.com/products/agriculture-weather-station/item/277-se01-lb.html (accessed on 17 June 2023).
- El-Naggar, A.G.; Hedley, C.B.; Horne, D.; Roudier, P.; Clothier, B.E. Soil sensing technology improves application of irrigation water. Agric. Water Manag. 2020, 228, 105901. [Google Scholar] [CrossRef]
- Irmak, S.; Rees, J.M.; Zoubek, G.L.; van DeWalle, B.S.; Rathje, W.R.; DeBuhr, R.; Leininger, D.; Siekman, D.D.; Schneider, J.W.; Christiansen, A.P. Nebraska agricultural water management demonstration network (NAWMDN): Integrating research and extension/outreach. Appl. Eng. Agric. 2010, 26, 599–613. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration-Guidelines for Computing Crop Water Requirements-FAO Irrigation and Drainage Paper 56; FAO: Rome, Italy, 1998. [Google Scholar]
- World Bank. Reengaging in Agricultural Water Management. Challenges and Options; The World Bank: Washington, DC, USA, 2006. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Da Cunha Leme Filho, J.F.; Ortiz, B.V.; Damianidis, D.; Balkcom, K.S.; Dougherty, M.; Poschel, T. Irrigation scheduling to promote corn productivity in central Alabama. J. Agric. Sci. 2020, 12, 34–51. [Google Scholar]
- Gao, Y.; Duan, A.; Qiu, X.; Liu, Z.; Sun, J.; Zhang, J.; Wang, H. Distribution of roots and root length density in a maize/soybean strip intercropping system. Agric. Water Manag. 2010, 98, 199–212. [Google Scholar] [CrossRef]
- Souza, S.A.; Rodrigues, L.N. Increased profitability and energy savings potential with the use of precision irrigation. Agric. Water Manag. 2022, 270, 107730. [Google Scholar] [CrossRef]
- Vories, E.; O’Shaughnessy, S.; Sudduth, K.; Evett, S.; Andrade, M.; Drummond, S. Comparison of precision and conventional irrigation management of cotton and impact of soil texture. Precis. Agric. 2021, 22, 414–431. [Google Scholar] [CrossRef]
- Bondesan, L.; Ortiz, B.V.; Morlin, F.; Morata, G.; Duzy, L.; van Santen, E.; Vellidis, G. A comparison of precision and conventional irrigation in corn production in Southeast Alabama. Precis. Agric. 2023, 24, 40–67. [Google Scholar] [CrossRef]
- Quebrajo, L.; Perez-Ruiz, M.; Perez-Urrestarazu, L.; Martinez, G.; Egea, G. Linking thermal imaging and soil remote sensing to enhance irrigation management of sugar beet. Biosyst. Eng. 2017, 165, 77–87. [Google Scholar] [CrossRef]
- Fontanet, M.; Scudiero, E.; Skaggs, T.H.; Fernàndez-Garcia, D.; Ferrer, F.; Rodrigo, G.; Bellvert, J. Dynamic management zones for irrigation scheduling. Agric. Water Manag. 2020, 238, 106207. [Google Scholar] [CrossRef]
- Jimenez, A.F.; Cardenas, P.F.; Canales, A.; Jimenez, F.; Portacio, A. A survey on intelligent agents and multi-agents for irrigation scheduling. Comput. Electron. Agric. 2020, 176, 105474. [Google Scholar] [CrossRef]
- Reyes, J.; Wendroth, O.; Matocha, C.; Zhu, J. Delineating Site-Speciic Management Zones and Evaluating Soil Water Temporal Dynamics in a Farmer’s Field in Kentucky. Vadose Zone J. Adv. Crit. Zone Sci. 2019, 18, 1–19. [Google Scholar] [CrossRef]
- Kim, Y.; Evans, R.G.; Iversen, W.M. Remote sensing and control of an irrigation system using a distributed wireless sensor network. IEEE Trans. Instrum. Meas. 2008, 57, 1379–1387. [Google Scholar]
- Chavez, J.L.; Pierce, F.J.; Elliott, T.V.; Evans, R.G. A remote irrigation monitoring and control system for continuous move systems. Part A: Description and development. Precis. Agric. 2010, 11, 1–10. [Google Scholar] [CrossRef]
- Al-Qammaz, A.; Darabkh, K.A.; Abualigah, L.; Khasawneh, A.M.; Zinonos, Z. An AI-based irrigation and weather forecasting system utilizing LoraWAN and cloud computing technologies. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), Moscow, Russia, 26–29 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 443–448. [Google Scholar]
- Talaviya, T.; Shah, D.; Patel, N.; Yagnik, H.; Shah, M. Implementation of artificial intelligence in agriculture for optimisation of irrigation and application of pesticides and herbicides. Artif. Intell. Agric. 2020, 4, 58–73. [Google Scholar] [CrossRef]
- Muangprathub, J.; Boonnam, N.; Kajornkasirat, S.; Lekbangpong, N.; Wanichsombat, A.; Nillaor, P. IoT and agriculture data analysis for smart farm. Comput. Electron. Agric. 2019, 156, 467–474. [Google Scholar] [CrossRef]
- Perea, R.G.; Poyato, E.C.; Montesinos, P.; Díaz, J.R. Prediction of applied irrigation depths at farm level using artificial intelligence techniques. Agric. Water Manag. 2018, 206, 229–240. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor No | FC (%) | PWP (%) | VW (g cm−3) | FC (mm) | PWP (mm) | AW (mm) | MAD (mm) | |
|---|---|---|---|---|---|---|---|---|
| F1 | S2 | 32.49 | 14.80 | 1.45 | 141.10 | 64.27 | 76.84 | 102.69 |
| S3 | 29.17 | 14.38 | 1.47 | 128.41 | 63.28 | 65.13 | 95.85 | |
| S5 | 32.88 | 15.28 | 1.42 | 139.72 | 64.94 | 74.78 | 102.33 | |
| S7 | 31.66 | 15.99 | 1.44 | 137.10 | 69.24 | 67.86 | 103.17 | |
| S9 | 32.96 | 16.36 | 1.43 | 141.50 | 70.25 | 71.25 | 105.87 | |
| S10 | 29.12 | 12.92 | 1.50 | 131.11 | 58.19 | 72.92 | 94.65 | |
| S12 | 34.03 | 15.74 | 1.42 | 144.51 | 66.82 | 77.70 | 105.66 | |
| S13 | 32.21 | 16.09 | 1.44 | 139.28 | 69.56 | 69.71 | 104.42 | |
| S15 | 33.86 | 15.01 | 1.45 | 147.68 | 65.47 | 82.21 | 106.58 | |
| Ave | 32.04 | 15.17 | 1.45 | 138.94 | 65.78 | 74.16 | 102.36 | |
| Std | 1.80 | 1.07 | 0.03 | 6.07 | 3.78 | 5.32 | 4.30 | |
| CV (%) | 5.62 | 7.03 | 1.82 | 4.37 | 5.75 | 7.28 | 4.20 | |
| F2 | S8 | 28.07 | 9.87 | 1.56 | 131.58 | 46.27 | 85.31 | 88.92 |
| S11 | 28.79 | 11.10 | 1.52 | 130.91 | 50.47 | 80.44 | 90.69 | |
| S14 | 27.40 | 6.61 | 1.56 | 127.92 | 30.87 | 97.05 | 79.39 | |
| S18 | 28.00 | 6.87 | 1.46 | 122.38 | 30.05 | 92.33 | 76.22 | |
| Ave | 28.06 | 8.61 | 1.52 | 128.20 | 39.41 | 88.78 | 83.81 | |
| Std | 0.57 | 2.22 | 0.05 | 4.19 | 10.49 | 7.36 | 7.09 | |
| CV (%) | 2.02 | 25.77 | 3.18 | 3.27 | 26.61 | 8.29 | 8.46 |
| Irrigation Date | MC_BI (mm) | Irrigation Duration (h) | User Rate (mm da−1) | Recommended (mm da−1) | % Difference (mm da−1) | |
|---|---|---|---|---|---|---|
| F1 | 2 July | 108.17 | 7 | 20.16 | 30.73 | −34.4 |
| 5 July | 111.3 | 7 | 20.16 | 27.6 | −26.9 | |
| 7 July | 111.9 | 8 | 23.04 | 27.0 | −14.7 | |
| 13 July | 111.93 | 6 | 17.28 | 26.97 | −35.9 | |
| 17 July | 108.23 | 8 | 23.04 | 30.7 | −24.9 | |
| 21 July | 107.1 | 8 | 23.04 | 31.8 | −27.6 | |
| 25 July | 109.07 | 9 | 25.92 | 29.83 | −13.1 | |
| 4 August | 108.7 | 10 | 28.8 | 30.2 | −4.6 | |
| Average | 109.55 | 7.9 | 22.68 | 32.65 | −22.76 | |
| F2 | 2 July | 86.78 | 7 | 20.16 | 46.03 | −56.20 |
| 5 July | 85.73 | 6 | 17.28 | 47.19 | −63.38 | |
| 7 July | 97.05 | 6 | 17.28 | 34.61 | −50.07 | |
| 13 July | 96.00 | 6 | 17.28 | 35.78 | −51.70 | |
| 17 July | 88.43 | 8 | 23.04 | 44.19 | −47.86 | |
| 21 July | 95.25 | 8 | 23.04 | 36.61 | −37.06 | |
| 25 July | 95.85 | 9 | 25.92 | 35.94 | −27.88 | |
| 4 August | 97.28 | 10 | 28.80 | 34.36 | −16.18 | |
| Average | 92.79 | 7.50 | 21.60 | 39.34 | −45.09 | |
| F1 | F2 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Irrigation Date | FC_Ave (mm) | MC_BI (mm) | MC_AI (mm) | Diff. (mm) | %User Diff. | FC_Ave (mm) | MC_BI (mm) | MC_AI (mm) | Diff. (mm) | %User Diff. |
| 2 July | 138.9 | 108.2 | 128.3 | 10.6 | −7.6 | 128 | 87 | 107 | 21 | −17 |
| 5 July | 138.9 | 111.3 | 131.5 | 7.5 | −5.4 | 128 | 86 | 106 | 22 | −17 |
| 7 July | 138.9 | 111.9 | 134.9 | 4 | −2.9 | 128 | 97 | 120 | 8.1 | −6.3 |
| 13 July | 138.9 | 111.9 | 129.2 | 9.7 | −7 | 128 | 96 | 113 | 15 | −12 |
| 17 July | 138.9 | 108.2 | 131.3 | 7.7 | −5.5 | 128 | 88 | 112 | 17 | −13 |
| 21 July | 138.9 | 107.1 | 130.1 | 8.8 | −6.3 | 128 | 95 | 118 | 9.9 | −7.7 |
| 25 July | 138.9 | 109.1 | 135 | 4 | −2.8 | 128 | 96 | 122 | 6.4 | −5 |
| 4 August | 138.9 | 108.7 | 137.5 | 1.4 | −1 | 128 | 97 | 126 | 2.1 | −1.7 |
| Sensor No. | 2 July | 5 July | 7 July | 13 July | 17 July | 21 July | 25 July | 4 August | |
|---|---|---|---|---|---|---|---|---|---|
| F1 | S2 | 18.12 | 12.12 | 10.12 | 18.12 | 19.78 | 19.45 | 19.45 | 19.78 |
| S3 | 12.68 | 8.01 | 8.35 | 8.68 | 12.35 | 15.35 | 16.01 | 18.68 | |
| S5 | 28.25 | 27.58 | 27.58 | 23.58 | 22.25 | 25.58 | 22.25 | 20.25 | |
| S7 | 34.00 | 31.33 | 31.33 | 35.33 | 36.67 | 30.00 | 28.67 | 35.33 | |
| S9 | 37.22 | 41.89 | 41.56 | 36.22 | 37.22 | 37.56 | 35.22 | 24.56 | |
| S10 | 47.34 | 41.67 | 41.67 | 36.34 | 42.67 | 45.01 | 48.01 | 43.67 | |
| S12 | 40.24 | 40.24 | 40.24 | 36.57 | 47.57 | 52.90 | 51.90 | 52.90 | |
| S13 | 34.75 | 19.09 | 15.42 | 26.09 | 35.09 | 40.42 | 24.09 | 38.09 | |
| S15 | 55.09 | 54.42 | 54.09 | 49.09 | 53.42 | 52.09 | 53.09 | 49.09 | |
| Ave | 34.2 | 30.7 | 30.0 | 30.0 | 34.1 | 35.4 | 33.2 | 33.6 | |
| Std | 13.3 | 15.4 | 16.0 | 12.1 | 13.5 | 13.6 | 14.5 | 13.3 | |
| %CV | 39 | 50 | 53 | 40 | 40 | 39 | 44 | 40 | |
| Max diff (%) | 0.77 | 0.85 | 0.85 | 0.82 | 0.77 | 0.71 | 0.70 | 0.65 | |
| F2 | S8 | 39.20 | 40.20 | 39.20 | 36.20 | 38.20 | 32.20 | 26.20 | 30.86 |
| S11 | 43.79 | 44.12 | 25.46 | 36.12 | 45.79 | 39.12 | 37.79 | 23.79 | |
| S14 | 53.80 | 57.13 | 28.80 | 36.46 | 50.13 | 44.13 | 45.46 | 46.46 | |
| S18 | 47.32 | 47.32 | 44.98 | 34.32 | 42.65 | 30.98 | 34.32 | 36.32 | |
| Ave | 46.03 | 47.19 | 34.61 | 35.78 | 44.19 | 36.61 | 35.94 | 34.36 | |
| Std | 6.2 | 7.2 | 9.1 | 1.0 | 5.0 | 6.2 | 8.0 | 9.6 | |
| %CV | 13.4 | 15.3 | 26.2 | 2.7 | 11.4 | 16.8 | 22.2 | 27.8 | |
| Max diff (%) | 0.27 | 0.30 | 0.43 | 0.06 | 0.24 | 0.30 | 0.42 | 0.49 |
| Sensor No. | 2 July | 5 July | 7 July | 13 July | 17 July | 21 July | 25 July | 4 August | |
|---|---|---|---|---|---|---|---|---|---|
| F1 | S2 | 15.4 | 17.0 | 18.0 | 11.5 | 13.9 | 15.4 | 13.3 | 13.4 |
| S3 | 8.2 | 8.9 | 8.0 | 7.7 | 8.4 | 7.0 | 4.5 | 2.7 | |
| S5 | 5.7 | 3.2 | 2.7 | 5.9 | 10.6 | 9.0 | 9.7 | 11.8 | |
| S7 | −1.5 | −2.2 | −2.7 | −5.9 | −3.8 | 2.8 | 2.0 | −3.1 | |
| S9 | −0.2 | −6.7 | −7.0 | −2.7 | −0.2 | 0.6 | 0.7 | 9.8 | |
| S10 | −18.2 | −15.9 | −16.4 | −12.1 | −14.4 | −15.4 | −19.4 | −15.5 | |
| S12 | 0.1 | −2.7 | −3.2 | −0.3 | −6.0 | −9.5 | −10.3 | −10.9 | |
| S13 | −0.2 | 9.7 | 12.1 | 3.5 | −0.5 | −3.9 | 7.8 | −3.4 | |
| S15 | −9.3 | −11.3 | −11.5 | −7.5 | −8.0 | −5.9 | −8.4 | −4.8 | |
| F2 | S8 | 11.0 | 11.3 | −0.8 | 3.1 | 9.9 | 7.7 | 12.7 | 6.7 |
| S11 | 5.4 | 6.4 | 11.3 | 2.5 | 1.4 | 0.5 | 1.1 | 12.6 | |
| S14 | −8.4 | −10.8 | 5.1 | −0.9 | −6.4 | −7.4 | −9.2 | −11.5 | |
| S18 | −8.0 | −6.9 | −15.6 | −4.7 | −5.0 | −0.8 | −4.5 | −7.8 |
| 3 MZs | 5 MZs | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Irrigation Date/Rate | H | M | L | H | MH | M | ML | L | |
| F1 | 2 July | 1.60 | 5.36 | 1.32 | 0.41 | 1.18 | 3.06 | 2.58 | 1.05 |
| 5 July | 0.90 | 4.26 | 3.12 | 0.14 | 0.75 | 2.82 | 1.97 | 2.60 | |
| 7 July | 3.26 | 3.45 | 1.57 | 1.44 | 3.28 | 2.00 | 1.11 | 0.46 | |
| 13 July | 3.56 | 3.58 | 1.14 | 0.72 | 4.26 | 2.17 | 0.55 | 0.59 | |
| 17 July | 1.80 | 5.53 | 0.95 | 0.49 | 1.31 | 4.09 | 1.44 | 0.95 | |
| 21 July | 1.54 | 4.95 | 1.79 | 1.20 | 1.76 | 3.53 | 1.11 | 0.68 | |
| 25 July | 1.20 | 3.08 | 4.00 | 0.65 | 1.06 | 2.08 | 2.51 | 1.98 | |
| 4 August | 1.35 | 4.93 | 2.01 | 0.40 | 1.20 | 3.07 | 2.65 | 0.97 | |
| Ave. | 1.90 | 4.39 | 1.99 | 0.68 | 1.85 | 2.85 | 1.74 | 1.16 | |
| Std dev. | 0.98 | 0.94 | 1.06 | 0.43 | 1.24 | 0.74 | 0.80 | 0.74 | |
| %CV | 51.31 | 21.28 | 53.11 | 63.67 | 67.24 | 26.10 | 45.94 | 64.21 | |
| F2 | 2 July | 0.27 | 1.69 | 0.54 | 0.13 | 0.38 | 1.24 | 0.48 | 0.28 |
| 5 July | 0.52 | 1.50 | 0.49 | 0.29 | 0.23 | 0.96 | 0.53 | 0.49 | |
| 7 July | 0.49 | 1.21 | 0.80 | 0.33 | 0.69 | 0.69 | 0.30 | 0.49 | |
| 13 July | 0.94 | 1.01 | 0.56 | 0.32 | 0.93 | 0.50 | 0.30 | 0.46 | |
| 17 July | 0.11 | 0.83 | 1.56 | 0.11 | 0.32 | 0.51 | 0.99 | 0.57 | |
| 21 July | 0.56 | 0.96 | 0.99 | 0.21 | 0.34 | 0.30 | 0.66 | 0.99 | |
| 25 July | 0.78 | 1.43 | 0.29 | 0.16 | 0.62 | 0.97 | 0.46 | 0.29 | |
| 4 August | 0.22 | 1.55 | 0.74 | 0.13 | 0.24 | 1.39 | 0.47 | 0.27 | |
| Ave. | 0.49 | 1.27 | 0.75 | 0.21 | 0.47 | 0.82 | 0.52 | 0.48 | |
| Std dev. | 0.28 | 0.31 | 0.39 | 0.09 | 0.25 | 0.38 | 0.22 | 0.23 | |
| %CV | 57.97 | 24.64 | 52.65 | 43.69 | 53.08 | 46.66 | 42.57 | 48.91 | |
| 3 MZs | 5 MZs | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Irrigation Date/Rate | H | M | L | H | MH | M | ML | L | |
| F1 | 2 July | 1.61 | 5.35 | 1.32 | 0.41 | 1.16 | 3.05 | 2.35 | 1.32 |
| 5 July | 3.16 | 4.31 | 0.82 | 0.49 | 2.68 | 3.78 | 0.67 | 0.66 | |
| 7 July | 3.25 | 3.44 | 1.60 | 1.49 | 3.24 | 1.98 | 1.13 | 0.45 | |
| 13 July | 3.67 | 3.44 | 1.18 | 0.81 | 4.11 | 2.18 | 0.55 | 0.64 | |
| 17 July | 1.88 | 5.46 | 0.94 | 0.53 | 1.30 | 4.08 | 1.42 | 0.95 | |
| 21 July | 1.60 | 4.84 | 1.85 | 1.22 | 1.77 | 3.48 | 1.11 | 0.70 | |
| 25 July | 1.22 | 3.04 | 4.03 | 0.67 | 1.08 | 2.10 | 2.41 | 2.02 | |
| 4 August | 1.44 | 4.84 | 2.00 | 0.62 | 1.02 | 2.96 | 2.65 | 1.02 | |
| Ave. | 2.23 | 4.34 | 1.72 | 0.78 | 2.05 | 2.95 | 1.54 | 0.97 | |
| Std dev. | 0.96 | 0.93 | 1.02 | 0.38 | 1.16 | 0.80 | 0.83 | 0.50 | |
| %CV | 43.32 | 21.54 | 59.59 | 48.84 | 56.80 | 27.21 | 53.71 | 52.15 | |
| F2 | 2 July | 0.28 | 1.68 | 0.54 | 0.12 | 0.41 | 1.23 | 0.42 | 0.33 |
| 5 July | 0.53 | 1.49 | 0.49 | 0.29 | 0.24 | 0.94 | 0.55 | 0.49 | |
| 7 July | 0.49 | 1.22 | 0.80 | 0.35 | 0.71 | 0.62 | 0.29 | 0.53 | |
| 13 July | 1.05 | 0.86 | 0.60 | 0.58 | 0.70 | 0.49 | 0.28 | 0.45 | |
| 17 July | 0.12 | 0.86 | 1.52 | 0.11 | 0.34 | 0.53 | 0.77 | 0.76 | |
| 21 July | 0.57 | 0.96 | 0.98 | 0.23 | 0.32 | 0.30 | 0.67 | 0.98 | |
| 25 July | 0.79 | 1.38 | 0.33 | 0.14 | 0.64 | 0.97 | 0.42 | 0.33 | |
| 4 August | 0.25 | 1.50 | 0.76 | 0.12 | 0.26 | 1.35 | 0.48 | 0.29 | |
| Ave. | 0.51 | 1.24 | 0.75 | 0.24 | 0.45 | 0.80 | 0.49 | 0.52 | |
| Std dev. | 0.30 | 0.32 | 0.37 | 0.16 | 0.20 | 0.38 | 0.17 | 0.24 | |
| %CV | 59.82 | 25.77 | 49.26 | 67.40 | 44.30 | 46.99 | 35.12 | 46.14 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bantchina, B.B.; Gündoğdu, K.S.; Arslan, S.; Ulusoy, Y.; Tekin, Y.; Pantazi, X.E.; Dolaptsis, K.; Paraskevas, C.; Tziotzios, G.; Qaswar, M.; et al. Spatiotemporal Modeling of Soil Water Dynamics for Site-Specific Variable Rate Irrigation in Maize. Soil Syst. 2024, 8, 19. https://doi.org/10.3390/soilsystems8010019
Bantchina BB, Gündoğdu KS, Arslan S, Ulusoy Y, Tekin Y, Pantazi XE, Dolaptsis K, Paraskevas C, Tziotzios G, Qaswar M, et al. Spatiotemporal Modeling of Soil Water Dynamics for Site-Specific Variable Rate Irrigation in Maize. Soil Systems. 2024; 8(1):19. https://doi.org/10.3390/soilsystems8010019
Chicago/Turabian StyleBantchina, Bere Benjamin, Kemal Sulhi Gündoğdu, Selçuk Arslan, Yahya Ulusoy, Yücel Tekin, Xanthoula Eirini Pantazi, Konstantinos Dolaptsis, Charalampos Paraskevas, Georgios Tziotzios, Muhammad Qaswar, and et al. 2024. "Spatiotemporal Modeling of Soil Water Dynamics for Site-Specific Variable Rate Irrigation in Maize" Soil Systems 8, no. 1: 19. https://doi.org/10.3390/soilsystems8010019
APA StyleBantchina, B. B., Gündoğdu, K. S., Arslan, S., Ulusoy, Y., Tekin, Y., Pantazi, X. E., Dolaptsis, K., Paraskevas, C., Tziotzios, G., Qaswar, M., & Mouazen, A. M. (2024). Spatiotemporal Modeling of Soil Water Dynamics for Site-Specific Variable Rate Irrigation in Maize. Soil Systems, 8(1), 19. https://doi.org/10.3390/soilsystems8010019