1. Introduction
Since the 1980s, ANN algorithms have appeared as a type of deep learning, undergone continuous development, and been applied in various research fields. The ANN algorithm obtains parallel and distributed information processing capabilities through the transformation of its own network and the change in the incentive function. When dealing with complex nonlinear problems, ANNs are more efficient and accurate than other mathematical models. In the research area of vehicle vibration, especially seat vibration, ANN methods have recently become effective tools for the study of vibration control and ride comfort. For the vibration control of a vehicle seat system, ANNs are widely used to predict the seating system vibration or ride comfort out of various design parameter variables to improve the vibration control performance and reduce the system complexity. It was shown that compared with the traditional complex model that requires various sensors, a trained ANN model was able to predict the dynamic characteristics of a 7-DOF automobile chassis suspension model well, thereby increasing the accuracy of the system control while decreasing the system complexity [
1]. In addition, in an ANN model, the relationship between the input and target can be easily established without considering the nonlinearity of the system. An ANN algorithm was applied to simulate the dynamic characteristics of the human body through developing a human body model [
2]. Compared with ordinary mathematical models, ANN models can more quickly solve the nonlinearity problems of the human body. For example, a trained ANN model can predict head acceleration from the vibration amplitudes of the hands and the seat and can be applied to study the nonlinear dynamic characteristics of ligaments and other tissues. Moreover, a trained human–worker static network model was applied to predict the synchronous acceleration of the human body based on the vibration of the pelvis [
3]. This human model was used to evaluate the comfort of a seat. The experimental results also proved that the ANN control algorithm had higher accuracy than the other control algorithms in the study. In another study [
4], an ANN module was used to train a signal to control an actuator to generate a corresponding motion according to the response speed and displacement changes. For parameter recognition, a trained ANN model was applied to recognize the roughness of a road through vehicle dynamic signal recognition and parameter setting [
5]. This research enabled the traditional control system to have more decision-making capabilities. The introduction of ANN algorithms into controller design has greatly enriched the development of active seat vibration control. The output target is predicted from input variables through establishing powerful nonlinear relationships by using ANN algorithms, thereby increasing the accuracy and performance of control systems.
On the other hand, ANNs have been applied to predict ride comfort in research on car seat vibration control. For the study of a parametric human model, an ANN was applied to predict the human body’s exposure to vibration dose from the longitudinal acceleration of the cab floor and the speed of the vehicle [
6]. In addition, a multi-layer feedforward ANN with a multi-structure forward propagation (BP) algorithm was developed to predict the most comprehensive and best seat configuration through an analysis of measured human body parameters, sitting posture, and vibration conditions [
7]. The experiments showed that a well-trained ANN was able to predict the biodynamic response of a seated object, and the response was a function of body weight, input vibration amplitude, and support state. In another two studies [
8,
9], the vibration input and human dynamic response target in experiments were used as training data, and ANN algorithm modeling was applied to establish a biodynamic model through training. It was verified that the model was able to predict the dynamic response of the human body under vibration.
The following three studies collectively discuss the application of ANNs in predicting ride comfort. In study [
10], ride comfort was estimated using an ANN combined with anthropometric data and acceleration measurements. Similarly, the development of a three-layer ANN model, aimed at precisely estimating the real-time ride comfort of bus passengers, was focused on [
11]. These studies demonstrate that ANNs can effectively process and analyze complex data, enhancing the accuracy of subjective ride comfort predictions. However, despite the precision of this method, which combines subjective sensations with modeling predictions, it presents challenges in quantification, making it difficult to control or optimize the system for ride comfort. These difficulties mainly stem from the subjective nature of and variability in ride comfort, as well as the complexity of neural network models in processing such subjective data.
Therefore, the core challenge of this research is to combine the high degree of automation and pattern recognition abilities of an ANN with the transparency and interpretability of traditional statistical methods to quickly predict and evaluate ride comfort and reduce the complexity and preparation process of experiments.
The combined approach of an ANN and RSM holds great potential to provide useful tools for seat vibration analysis as well as for predicting biodynamic response and parameter interaction effects. However, previous studies have not focused on the actual output target of ride comfort performance, using seat design parameters as input variables, which is the research gap. The main contribution of this paper is the establishment of a hybrid approach of ANNs and RSM for the prediction of ride comfort based on seat design parameters. The ANNs are first trained using input and output results calculated from a 5-DOF biodynamic seat suspension system model. The output and input results of the ANNs are then used to develop a response surface method model. The uniqueness of the hybrid approach lies in saving the design of experiments for response surface method modelling. In this paper, the response target is assumed to be the peak transmission ratio from the seat base to the head at about 4 Hz, reflecting the ride comfort.
2. Method
First, a reliable 5-DOF human body biodynamic model was established [
12,
13,
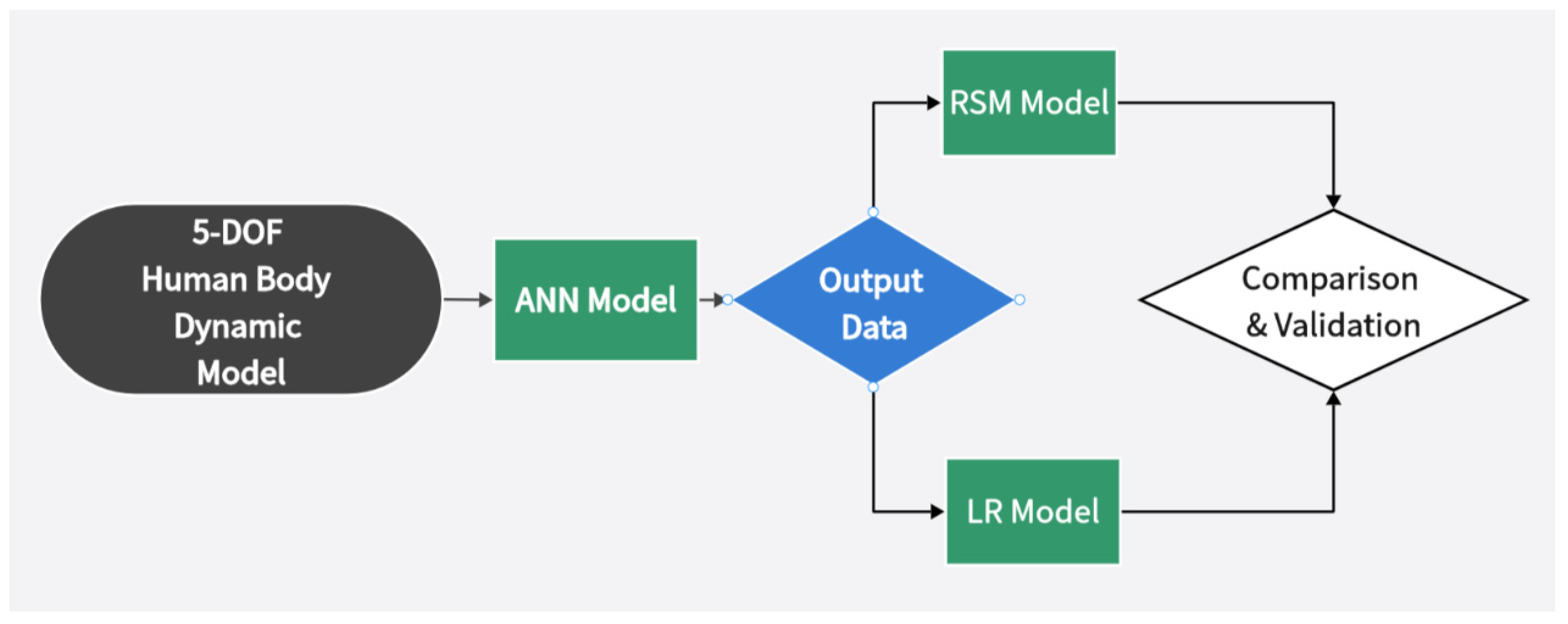
14]. This model, based on experimental results, employs a GA method for rapid parameter identification, enabling an accurate simulation of the human body’s low-frequency dynamic response under various vibration conditions. A substantial number of data were generated from extensive vibration experiments, encompassing the human body’s response to low-frequency vibrations across various seat design parameters and vibration conditions. The data were then used to train a neural network model. The neural network was designed to establish linear or nonlinear relationships between the parameters of the dynamical model and the vibration transmission ratio itself. Given the complexity inherent in these relationships, using a neural network significantly reduces the difficulty of computation and modeling. The neural network’s capability in handling large datasets and identifying complex patterns enables it to accurately predict human vibration responses under different parameter combinations. Subsequently, the data generated by the neural network model were used for RSM modeling analysis. RSM is a robust statistical tool for response prediction, parameter sensitivity analysis, and optimization. In this study, RSM allowed us to explore and optimize seat design parameters to minimize the impact of vibrations on the human body. The entire research process is illustrated in
Figure 1. Finally, linear regression and response surface modelling methods were compared with each other and validated to ensure the accuracy and reliability of the research outcomes.
3. ANN Model
The backpropagation (BP) algorithm is a widely used method in the training of ANNs, combined with optimization techniques like gradient descent. This algorithm works by calculating the gradient of all weights and biases in the network relative to the loss function. The network adjusts its weights and biases based on this gradient information to minimize the loss function.
As a supervised learning technique, the BP algorithm requires the gradient of the loss function to be determined for each input data point’s expected output. The algorithm demands that the activation function of the neurons be differentiable to ensure that the gradient can be computed. The core of a BP network is the mapping relationship between its input and output, which often exhibits high nonlinearity. An ANN consists of multiple layers, each containing different numbers of neurons: the input layer receives input data, the hidden layers further process these data, and finally, the output layer produces the result. The connections between each neuron represent weight factors, which are continuously adjusted during the network’s learning process.
The learning process of an ANN model is divided into two phases: forward propagation and backward propagation. In the forward propagation phase, data are transmitted from the input layer through the hidden layers to the output layer. If the output layer fails to produce the expected result, the system calculates the mean squared error and uses it as the target function for the backward propagation phase. At this point, the algorithm calculates and minimizes the partial derivatives of the weights of each layer’s neurons concerning the target function to find the optimal combination of weights. The network performance is optimized by adjusting the weights during this process until the error reaches an acceptable range, at which point the network learning stops. The forward propagation can be calculated and given by:
where
xi represents input variables,
wi is the weighting factor, and
b is bias.
In ANN models, the most used activation (transfer) functions for the regression problems are
purlin,
logsig, and
tansig. The
logsig activation (transfer) function can be written as:
In the backpropagation process, the total error can be calculated and given by:
where
yi is the expected output value.
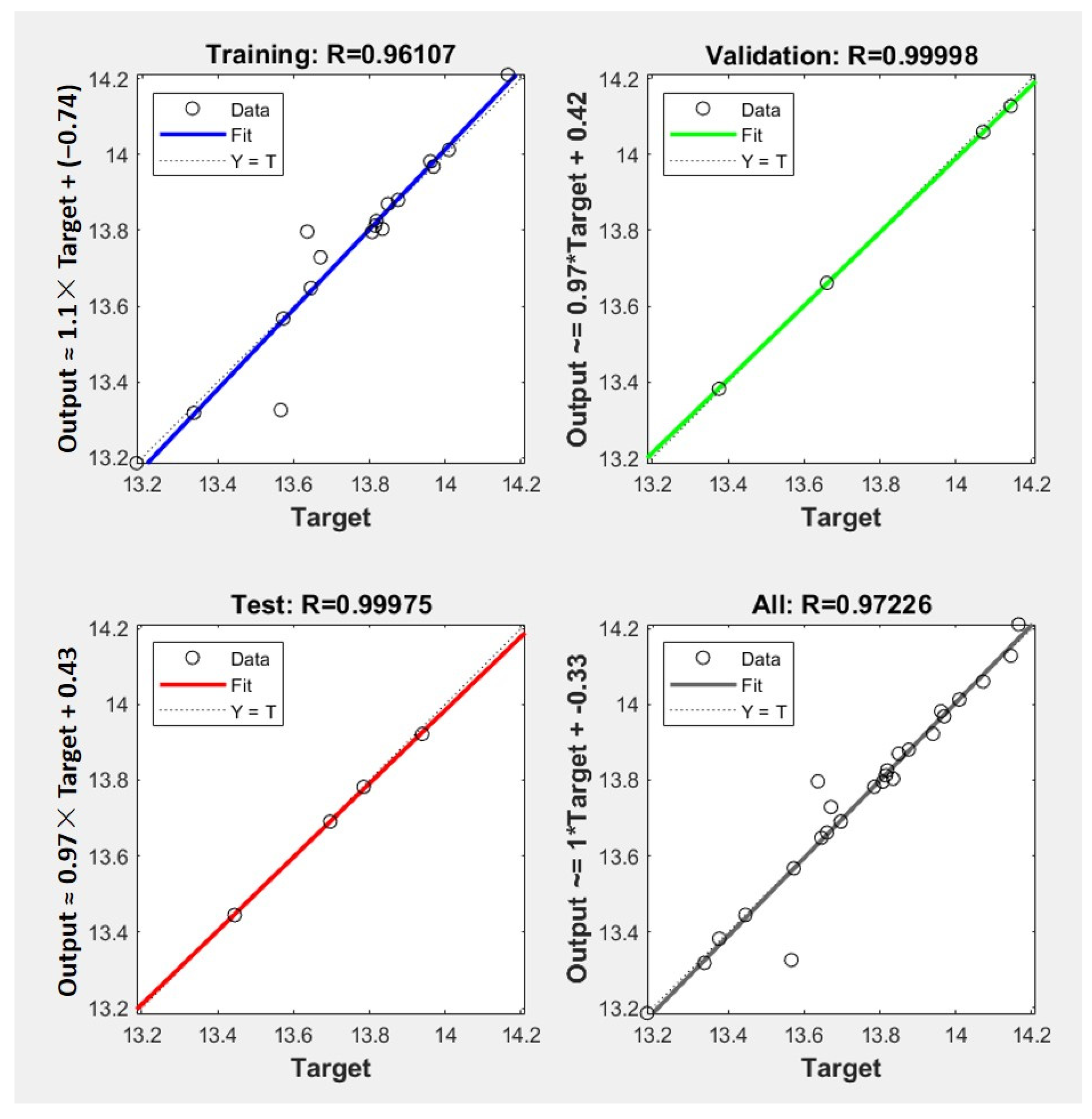
In this study, an ANN model with a dataset of 26 was established and trained. The training data included four parameters required by CCD and the corresponding human dynamic response, i.e., the peak vibration transmission ratio at 4 Hz. The neural network model was configured with a specific network topology, namely 4:6:2:1. This implies that the model includes four inputs, the first hidden layer consists of six neurons, the second hidden layer contains two neurons, and the output layer comprises one neuron. The entire dataset was allocated for different stages of model training: 60% (i.e., 16 datasets) were used for the training process. During this phase, the model’s weights and biases were adjusted and learned based on the training data. Subsequently, 20% of the data (i.e., five datasets) were utilized as a validation set to evaluate the model’s generalization capability during training, ensuring that the model adapts not only to the training data but also effectively handles new, unseen data. Finally, the remaining 20% (also five datasets) served as the test set, used to assess the model’s final performance post-training. As shown in
Figure 2, through this configuration, the network topology structure of the model is fully utilized in all stages of learning, validation, and testing. Such a data allocation strategy helps prevent overfitting and ensures that the model has good generalization ability.
4. RSM Model
In the design and analysis of car seats, previous studies often focused on design parameters one by one for their optimization without fully considering the interactions between different parameters. This single-variable optimization approach fails to comprehensively consider the combined impact of various parameters. Although this limitation can be overcome through design of experiments (DOE), it typically compromises the quality and cost of analysis.
RSM, as a tool combining mathematics and statistics, is widely used in engineering for optimizing multi-variable systems and is particularly suitable for systems with clearly defined parameter boundaries. The main purpose of RSM is to find the optimal parameter combination of a system model for the best system performance.
The process of RSM generally includes several key steps: firstly, the design of experiments, followed by the establishment of the model, then the verification of the model, and, finally, finding the optimal combination of parameters for the best system performance target. In addition, RSM also considers the impact of errors and adopts simple first-order or second-order polynomial models to represent the relationships between input and output results, thus enabling effective regression fitting. The implementation of RSM is divided into two main phases: the first phase is the design of the response surface, while the second phase is the optimization of the response surface.
When exploring the relationship between input variables and the response variable, choosing the appropriate approximation function is crucial. Within a specific range, first-order models are typically used for low-order polynomial approximations. If the system exhibits curvature characteristics, higher-order polynomial models, such as second-order models, need to be adopted.
In RSM, it is assumed that the variables affecting the response value Y are x1, x2…xk. In this case, Y is described as an unknown function Y = ƒ(x1, x2…xk) + ε, where ε represents experimental error, and the expected value of this error is assumed to be 0. Therefore, when E(Y) = ƒ(x1, x2…xk) + η is considered to be the expected response value, η represents the response surface.
In this study, an RSM model was established to predict the peak vibration transmissibility ratio at 4 Hertz under different design parameter settings. This is due to the resonance phenomenon that occurs when the natural frequency of the seat and the human body is close, specifically around the frequency of 4 Hz. This means that vibrations on the seat are amplified, resulting in a stronger vibration sensation for the person sitting in it. This vibration not only degrades ride comfort but may also lead to a range of health issues. As shown in
Table 1 and
Table 2, according to the statistical requirements of Box–Behnken’s experimental design, there were a total of 26 input design parameters arranged through a central composite design (CCD), and the corresponding peak vibration transmissibility ratio output response target values were predicted based on the ANN model described in previous studies. The inputs for the RSM model included seat stiffness
z1 =
K1, seat damping
z2 =
C1, cushion stiffness
z3 =
K2c, and cushion damping coefficient
z4 = C2c. Meanwhile, the peak vibration transmissibility ratio at 4 Hertz was considered the target response data for the RSM modeling.
A total of 26 sets of input dimensionless parameter combinations were designed according to the CCD design of input parameters as shown in
Table 2 to develop the RSM model, where α = 1.414 is the star value.
xi (
i = 1–4) is the dimensionless input parameter that changes from −1 to +1 corresponding to the dimensional input parameters
zi (
i = 1–4), which changes from the minimum to maximum values. The dimensional input parameters
zi (
i = 1–4) can be converted into the dimensionless input parameters
xi (
i = 1–4) by the following equation.
By performing multiple regression on the input and output parameters and the response
Y in
Table 2, the quadratic multiple parameter regression equation of the response
Y for the four parameters was finally obtained and given by
5. Results
It is seen from Equation (5) that all the coefficients of x1 to x4 are positive. When x1–x4 decreases, the response target output Y or the peak transmissibility ratio at 4 Hz decreases. The sequence of the coefficients or the sequence of the effects of the four parameters on the peak transmissibility ratio from large to small is x3, x1, x2, and x4. The nonlinear quadratic terms and also have large effects on the peak transmissibility ratio. The interaction term of has large negative effects on the peak transmissibility ratio. When increases, the peak transmissibility ratio decreases. This means that the coupling effects of the seat stiffness and damping have a large influence on the peak transmissibility ratio.
The RSM model was validated through analysis of variance (ANOVA), and the results of the statistical test are displayed in
Table 3. According to the ANOVA method, the
F-value is determined by measuring the variance of the average data. If the
F-value significantly deviates, it can be more confidently asserted that there is a better fit for the function. Subsequently, the
p-value is calculated based on the
F-value and the degrees of freedom (
df). To validate any regression model from a statistical perspective, the
F-value must be as high as possible, and the
p-value should be as low as possible. A
p-value less than 0.05 indicates that the model has been validated for prediction.
For this model, the F-value is high at 136.11, and the p-value is less than 10−4. Meanwhile, the R2 value is about 0.9943, close to 1. Additionally, the R2 is close to the adjusted R2. All statistical estimators indicate that the developed RSM model has been validated from a statistical standpoint, meaning the developed model can work well in predicting seat vibration transmissibility.
Furthermore, in the multi-parameter regression analysis, the F-values for X1 and X3 were observed to be higher than for the other parameters, having values of 565.24 and 1030.04, respectively, and the p-values are all less than 10−4. This result shows that these two parameters X3 and X1 have the largest and second largest impact on the response target output. The F-values for X2 and X4 are 25.53 and 9.4, respectively, lower than the first two, while the p-values are 0.0004 and 0.0107, both less than the threshold of 0.05. This indicates that these two parameters are statistically significant in this model, but their effects on the response target are slightly less. X4 and X2 have the least and second least effects on the response target output. The same conclusion can be drawn from the analysis of regression coefficients, where the effects of these parameters are ranked according to the order of the absolute values of the coefficients of the parameter terms from large to small. In the analysis of the interaction between parameters, the F-values for terms X1X2 and X3X4 were observed to be higher than for the other terms, and the p-values are all less than 0.05, making them statistically significant. This means that the coupling effect of the seat stiffness and damping has a large influence on the peak transmissibility ratio. The coupling effect of the cushion stiffness and damping also has a large influence on the peak transmissibility ratio. It can be inferred that the correlation between these two sets of parameters will impact the response target output, but the interaction effects between other parameters are not statistically significant in this analysis, meaning that the interaction effects between other parameters will not affect the response target output. In the actual experiments, it was proven that increasing or decreasing the stiffness of the seating system does indeed increase or decrease the damping coefficient of the seat, as does the seat cushion. This result also confirmed the reliability of the 5-DOF biodynamic model and the RSM model. In the quadratic term analysis, the F-value and p-value for the stiffness of the seat cushion X32 are of statistical significance. Therefore, it can be considered that in a nonlinear state, changes in the stiffness of the seat cushion will have a greater impact on the response target output of the vibration transmissibility ratio than those in the other parameters.
A linear regression methodology (LRM) was also applied in this study for data comparison and validation, like the RSM model. Like RSM, LRM also requires the CCD process. Therefore, it can directly use the ANN model for predicting the appropriate vibration transmissibility ratios for different parameter combinations, just like the former. In terms of data analysis, ANOVA analysis and the Student
t-test were conducted for the LRM. The ANOVA analysis and Student
t-test results of the LRM model are listed in
Table 4, where the
F-value of the whole LRM model is 29.90; the
Significance F (
p-value) of the whole LRM model is 2.12 × 10
−8, which is much less than 0.05. The multiple
R2 is 0.92; meanwhile, the
R2 value is about 0.85, and the adjusted
R2 is 0.82. All statistical metrics indicate that the developed LRM model is valid from a statistical standpoint. It can be seen from
Table 4 that
X3 and
X1 have the largest and second largest
t Stat values and have their corresponding
p-value of 0, which means that
X3 and
X1 have the most and second most influences on the peak transmissibility ratio. These results are also in good agreement with those drawn from the RSM.
Through analysis by RSM and LRM models, an optimal parameter combination can be obtained using a genetic algorithm to achieve better seat vibration isolation performance. According to the results in
Table 5, under the same optimal input parameters, the LRM, RSM, and ANN models show predicted peak transmissibility ratio values of 13.2, 13.36, and 13.25, respectively, which are close to the 5-DOF model prediction value of 13.1857. The RSM model exhibits the highest prediction accuracy. Consequently, the ANN model shows the second highest prediction accuracy. As the number of input parameters increases for the ANN model training, the ANN model prediction accuracy will increase. However, the computing time will also increase. This also suggests that the ANN model possesses a superior capability in handling system nonlinearities compared to the LRM model. The RSM’s prediction evidently demonstrates greater reliability than the LRM model in predicting the optimal target from the optimal input parameter combination. Moreover, it can be inferred that both the RSM model and the ANN model, which possess nonlinear processing capabilities, display greater predictive accuracy in optimizing design parameters than the LRM model. Thus, a novel approach that combines the strengths of both ANNs and RSM can achieve a balance between accuracy and computing time. Furthermore, such an approach can significantly reduce the complexity of preliminary experimental design often encountered in RSM modelling.
Despite the differences in the final target results predicted by these three methods, their predictions on the trend in optimal parameters for the smallest peak transmissibility ratio are consistent. Reducing the stiffness and damping coefficients of both the seat and the cushion effectively lowers the peak transmissibility ratio of the seat system, thereby enhancing the comfort of the seating experience.
6. Conclusions
The ANN algorithm provides a robust framework for addressing nonlinear and linear problems. The well-trained ANN model effectively simulates the dynamic characteristics of the 5-DOF biodynamic seating suspension system. The ANN model can accurately predict the peak transmissibility ratio from the seat base to the head at a vibration frequency of approximately 4 Hz from the input design parameters. The LRM and RSM models and their parameter sensitivity analyses are validated by the ANOVA results of the models. The ANN, LRM, and RSM models are validated by the 5-DOF biodynamic seating system models. The parameter sensitivity studies from the LRM and RSM models show that cushion stiffness has the largest influence on the peak transmissibility ratio. Seat stiffness has the second largest influence on the peak transmissibility ratio. Cushion damping has the least influence on the peak transmissibility ratio. Seat damping has the second least influence on the peak transmissibility ratio. Large interaction influences come from the coupling effect of seat stiffness and damping and from that of cushion stiffness and damping. Reducing the stiffness and damping coefficients of both the seat and cushion can effectively reduce the peak transmissibility ratio of the seat system, thereby enhancing the ride comfort.
Furthermore, the closeness of the optimization results predicted by RSM, ANN, and LRM further verifies the ANN’s advantages in handling nonlinear problems. The optimization prediction accuracy of the RSM model is larger than that of LRM model. The combination of the ANN and RSM models can significantly reduce the complexity of experiment design.





{kind=link}
{kind=link}