

Adaptive Notch Filter in a Two-Link Flexible Manipulator for the Compensation of Vibration and Gravity-Induced Distortion

Abstract
1. Introduction
2. Methods
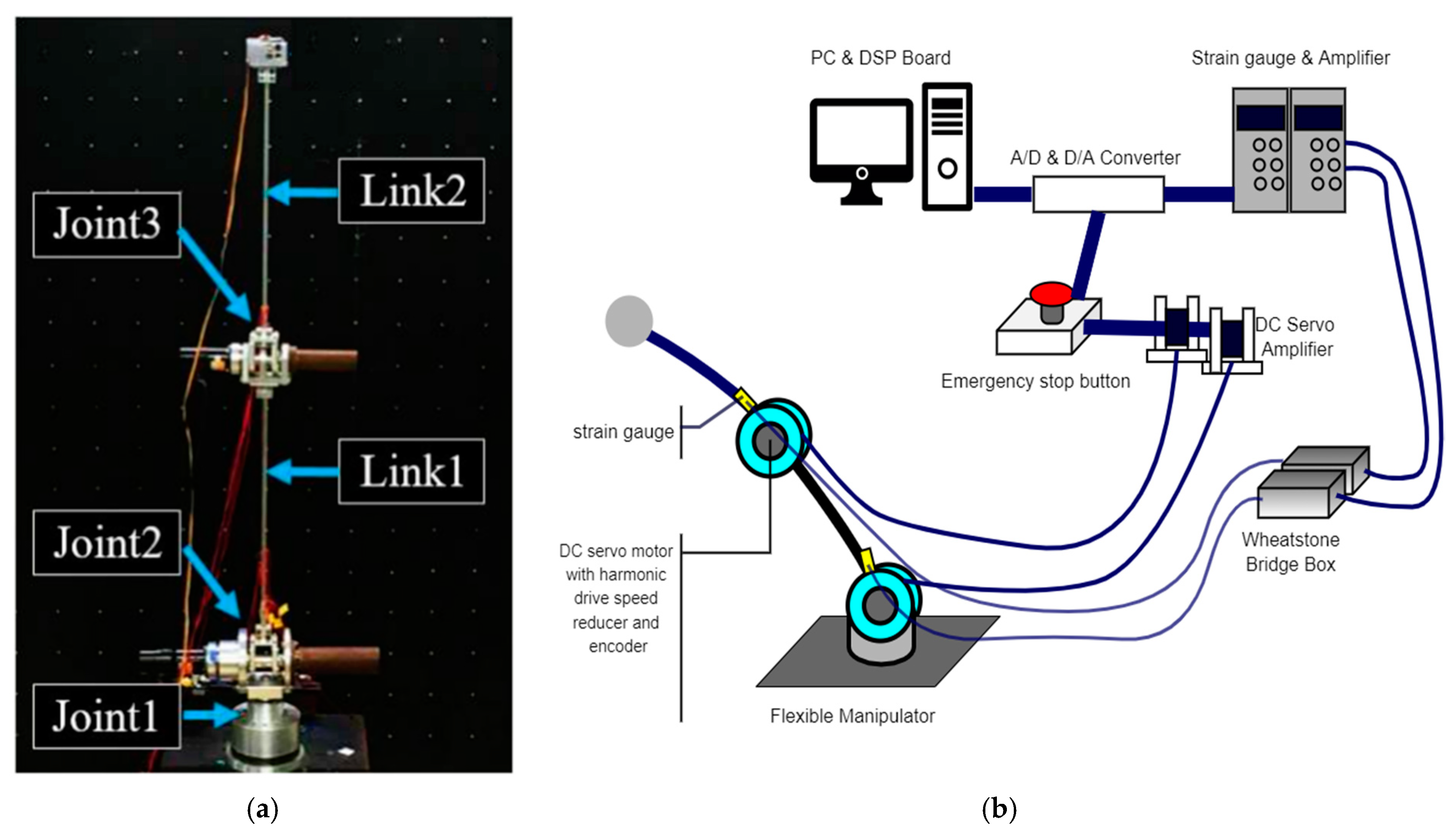
2.1. Physical Model Experiment
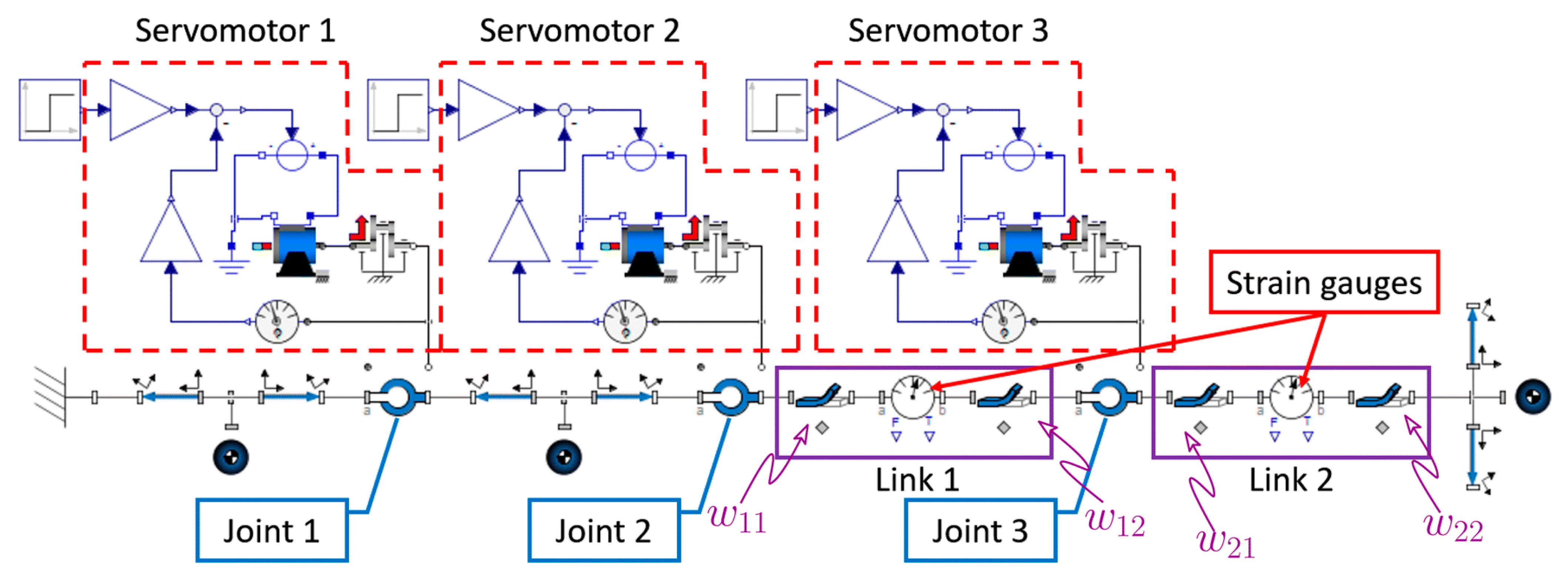
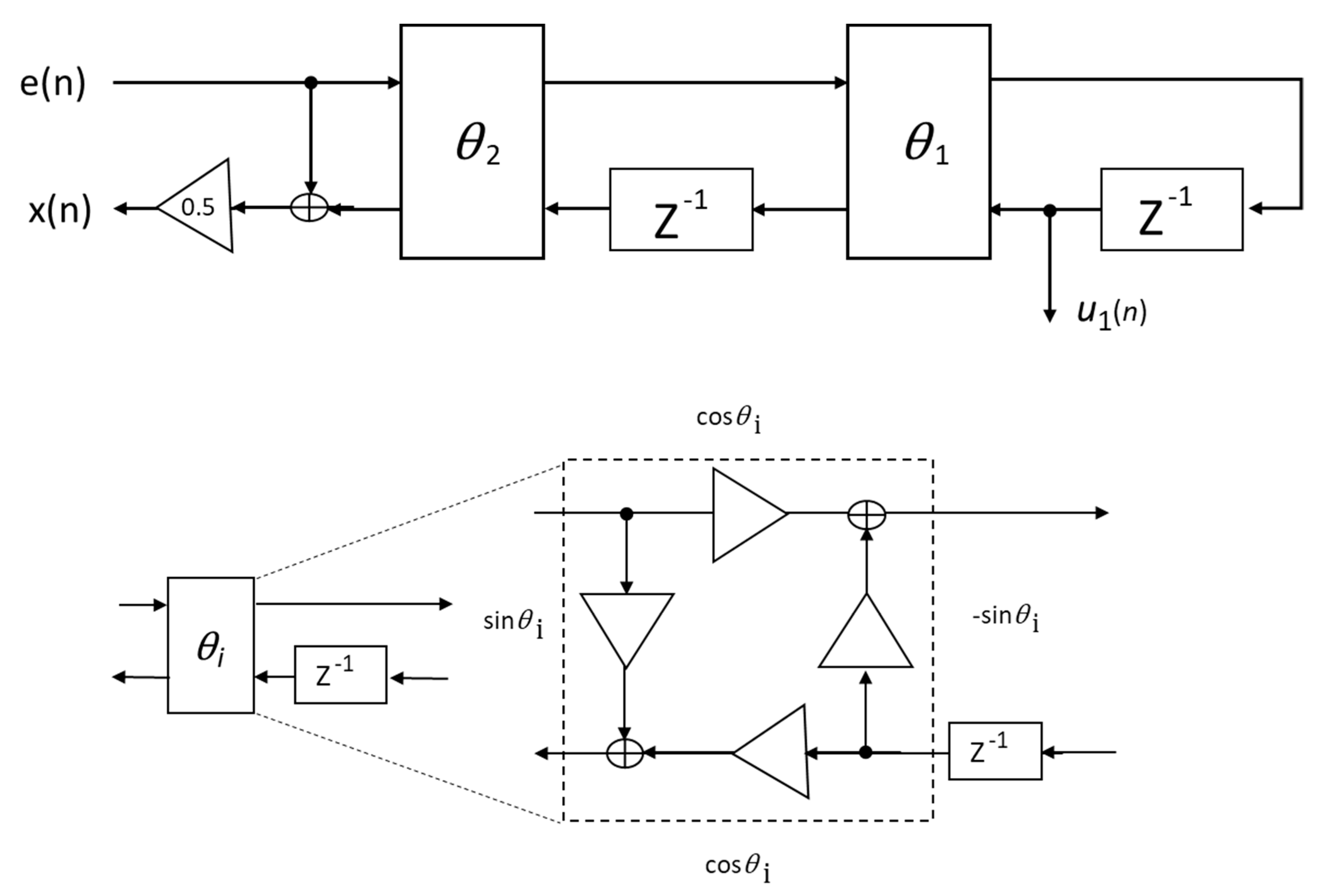
2.2. Linear and Nonlinear Model
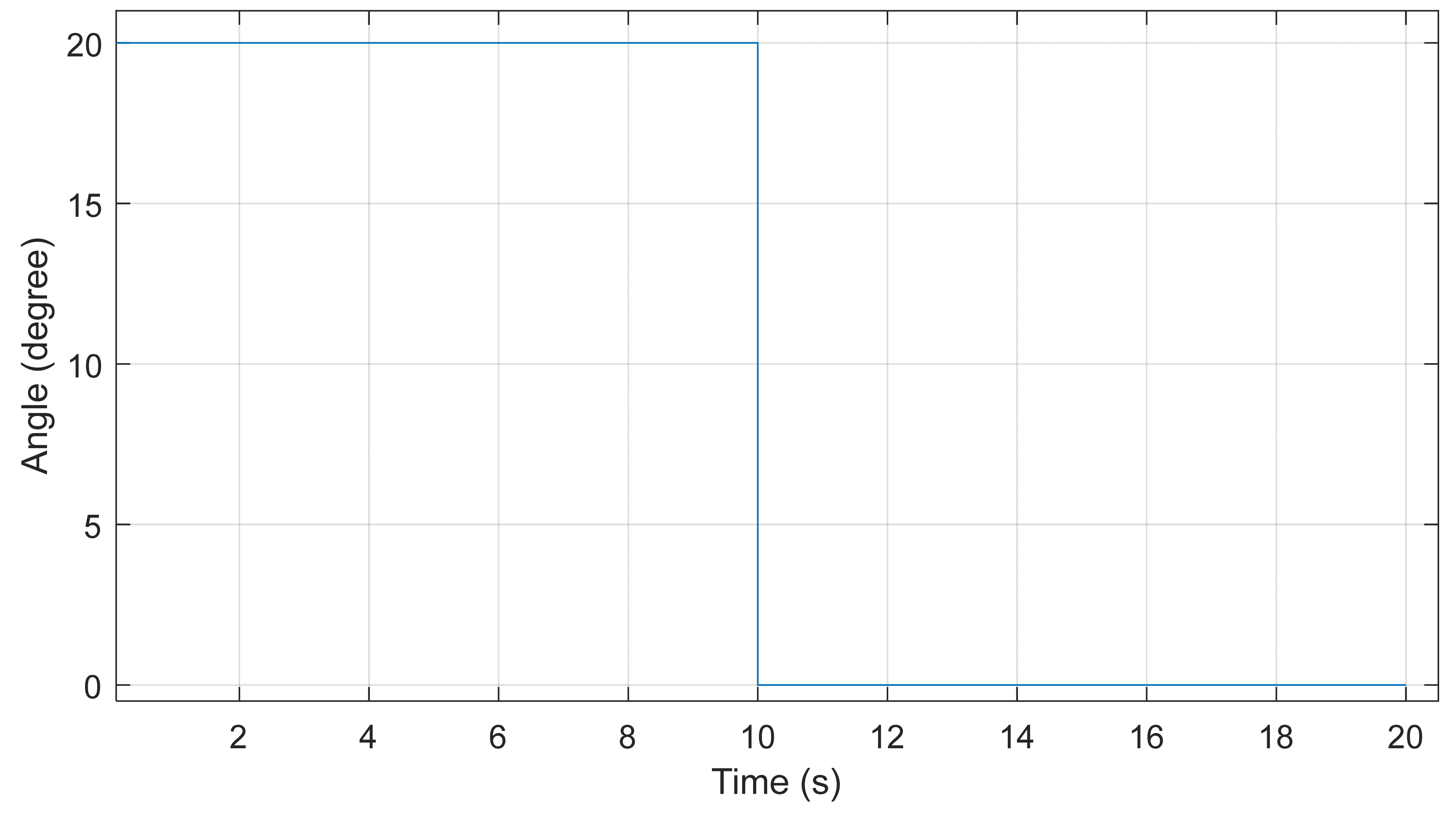
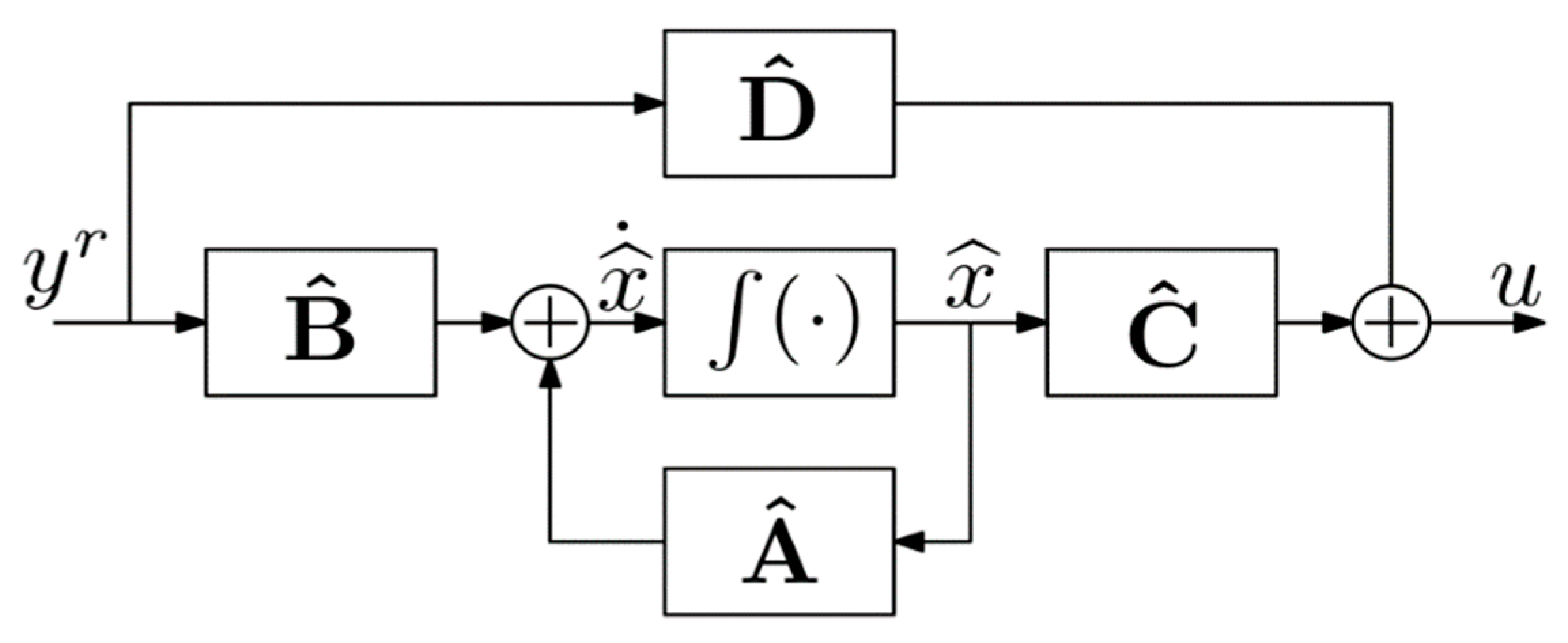
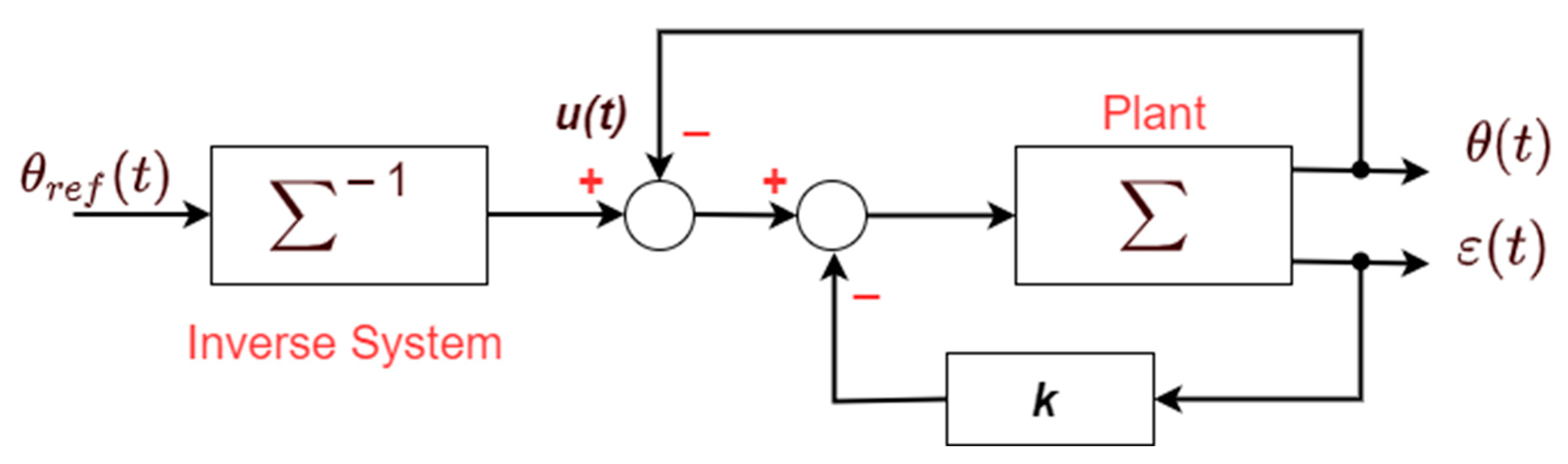
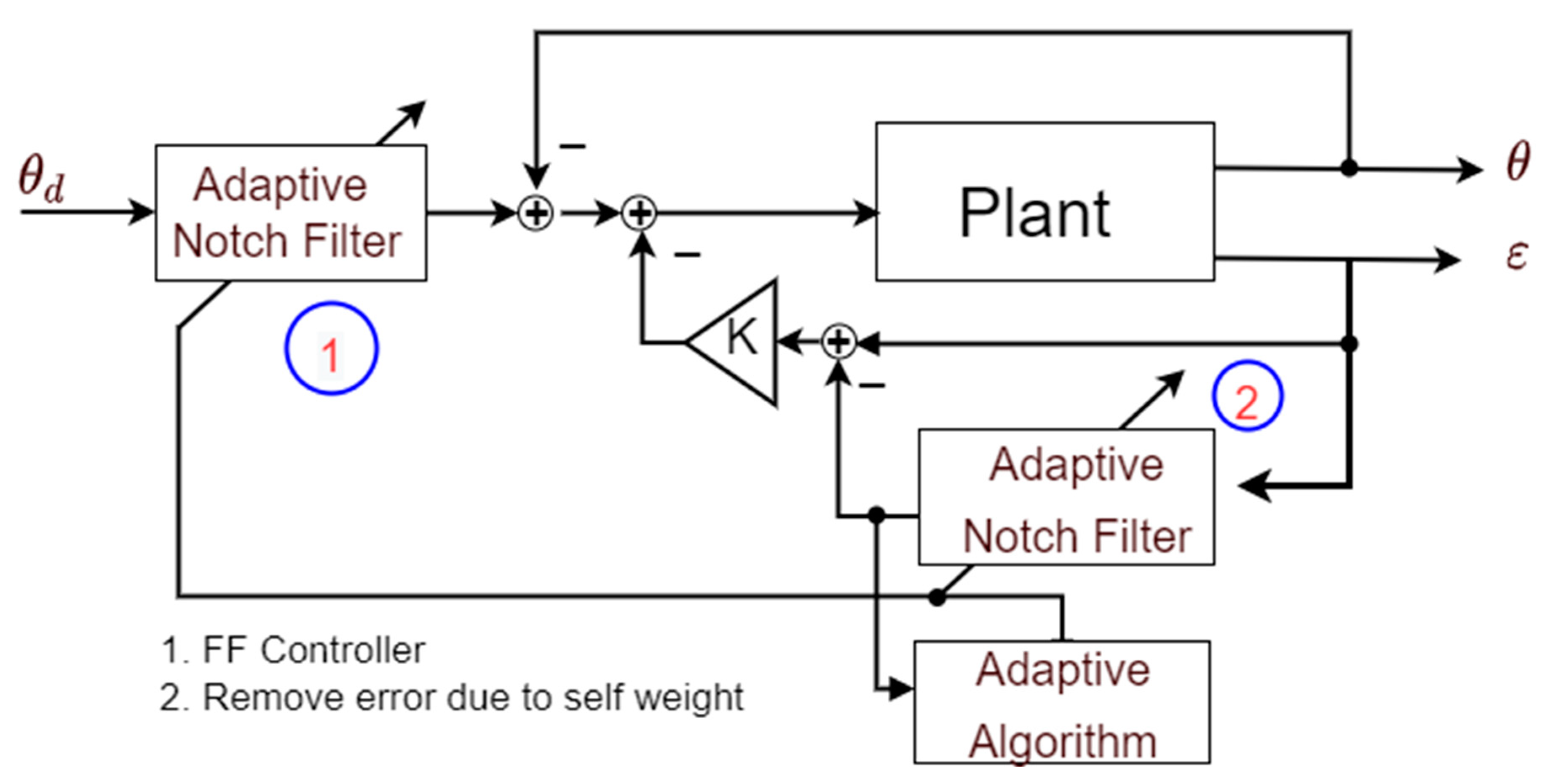
2.3. Verification of Control Using the Designed Controller
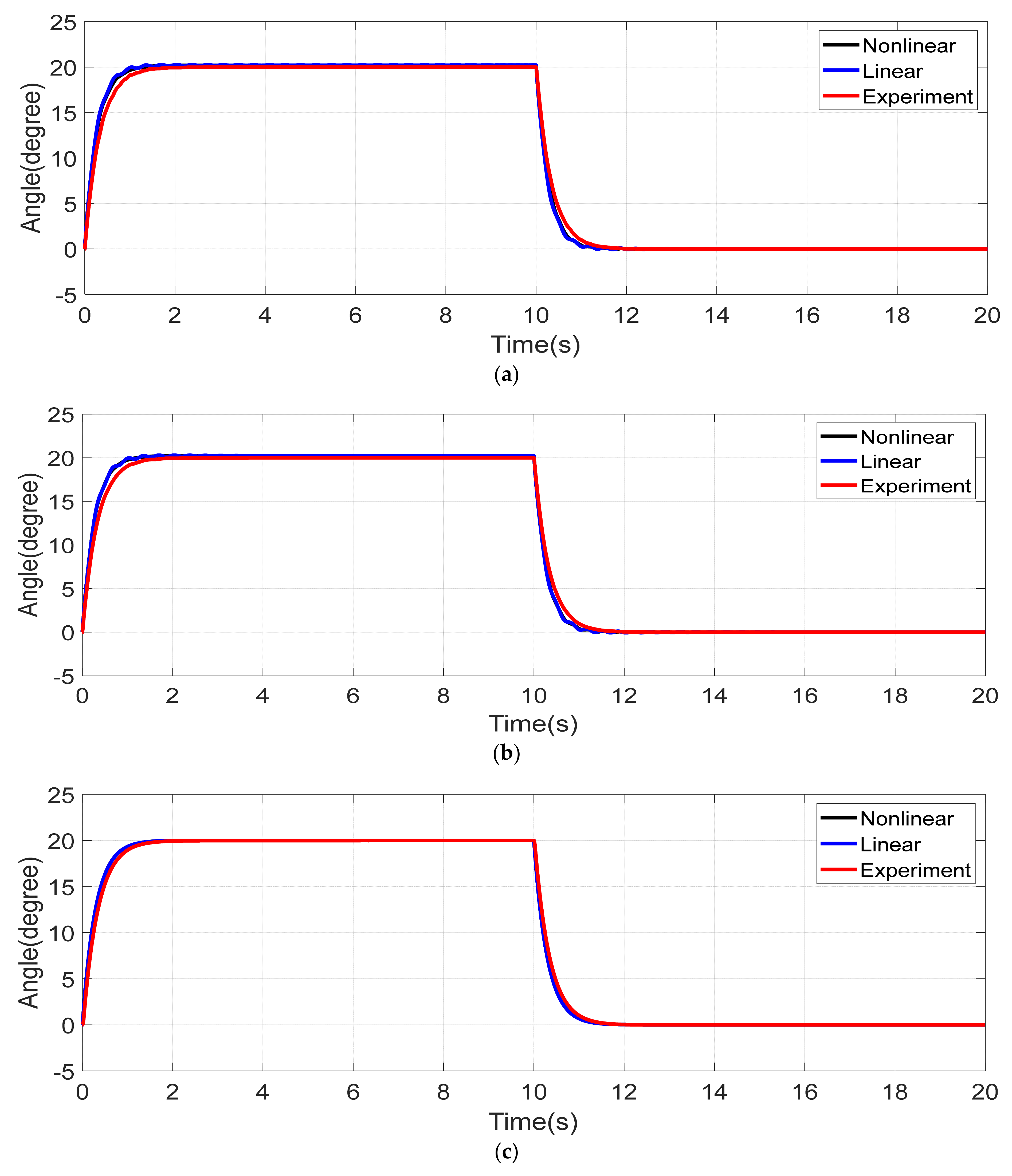
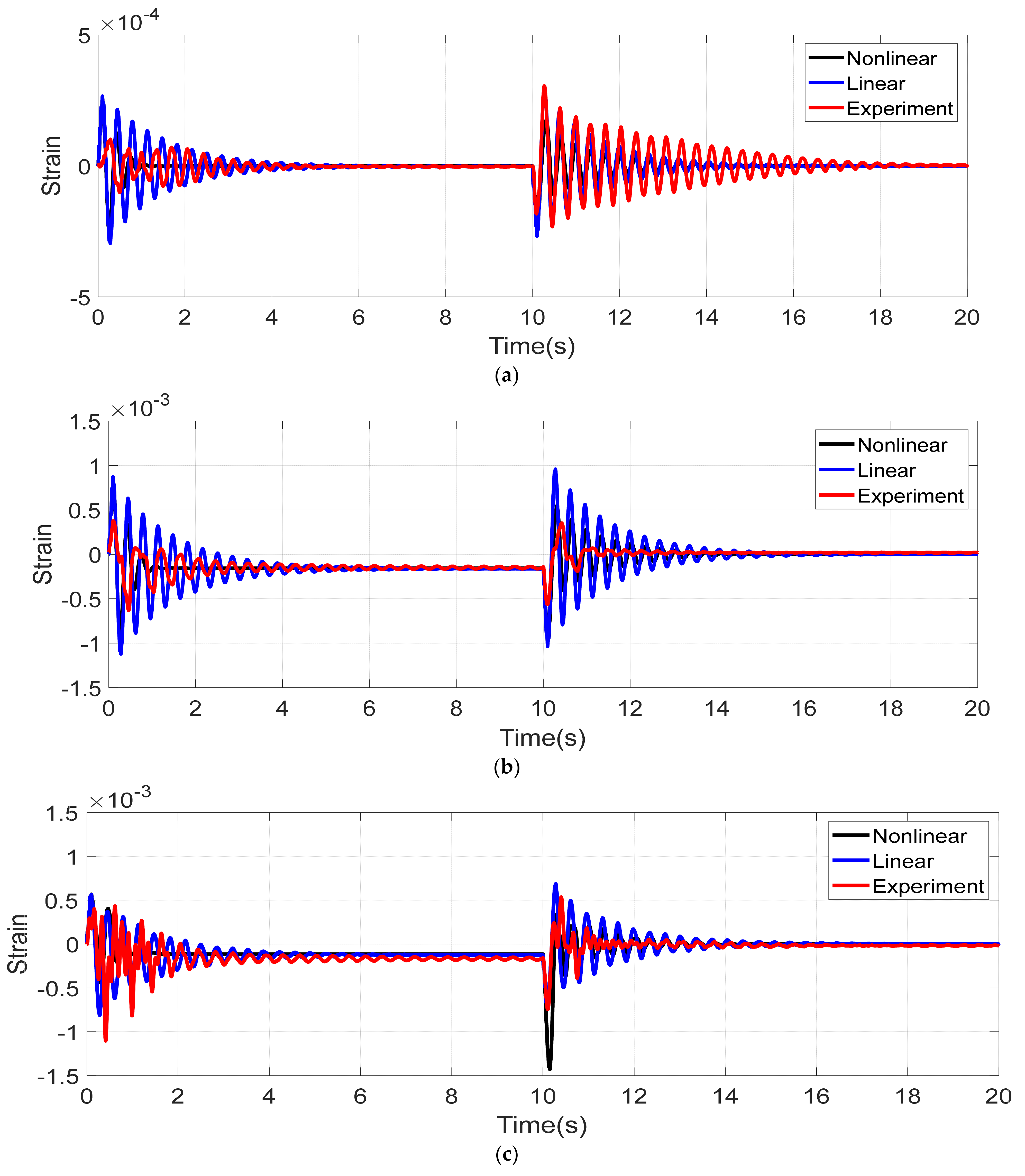
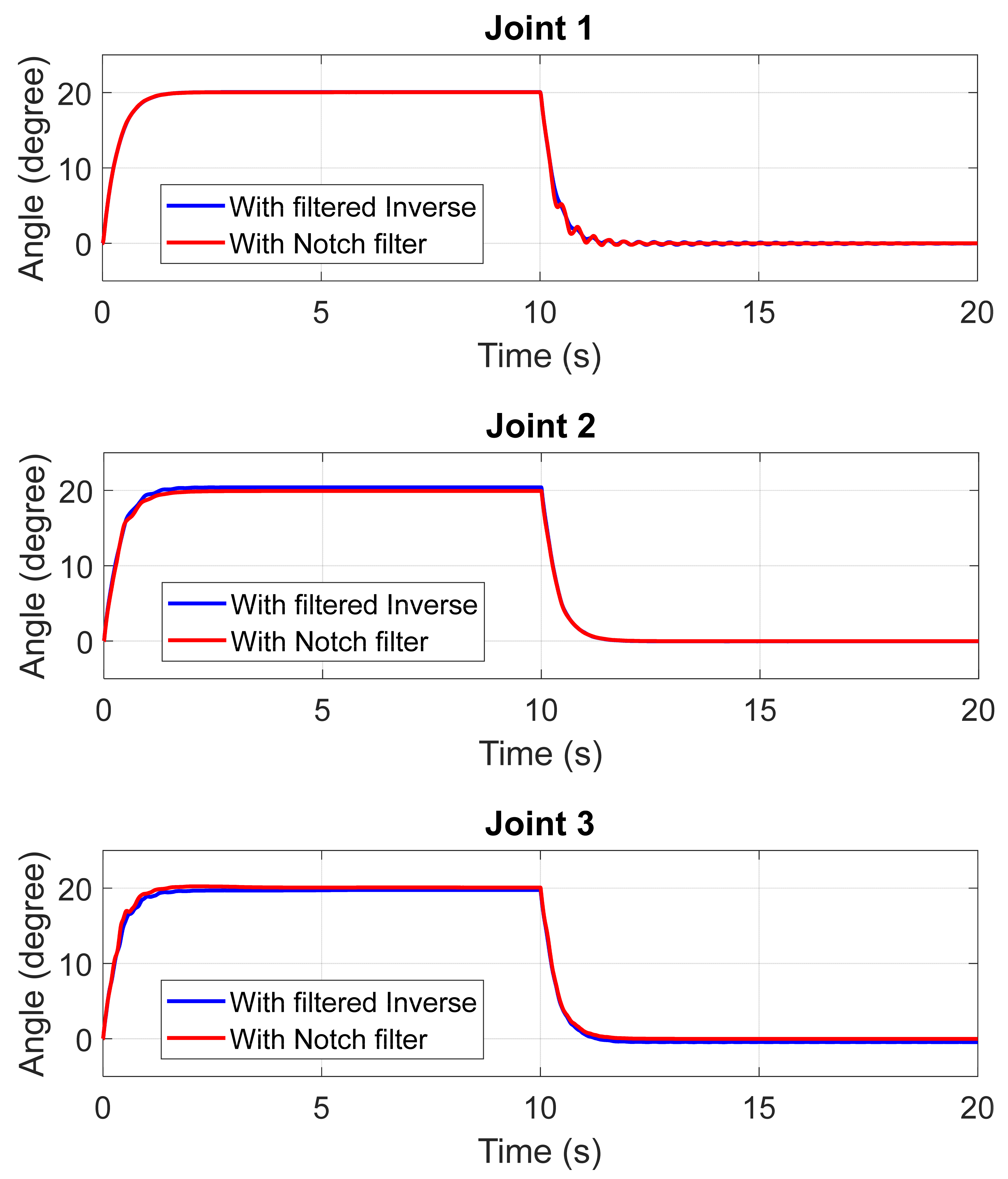
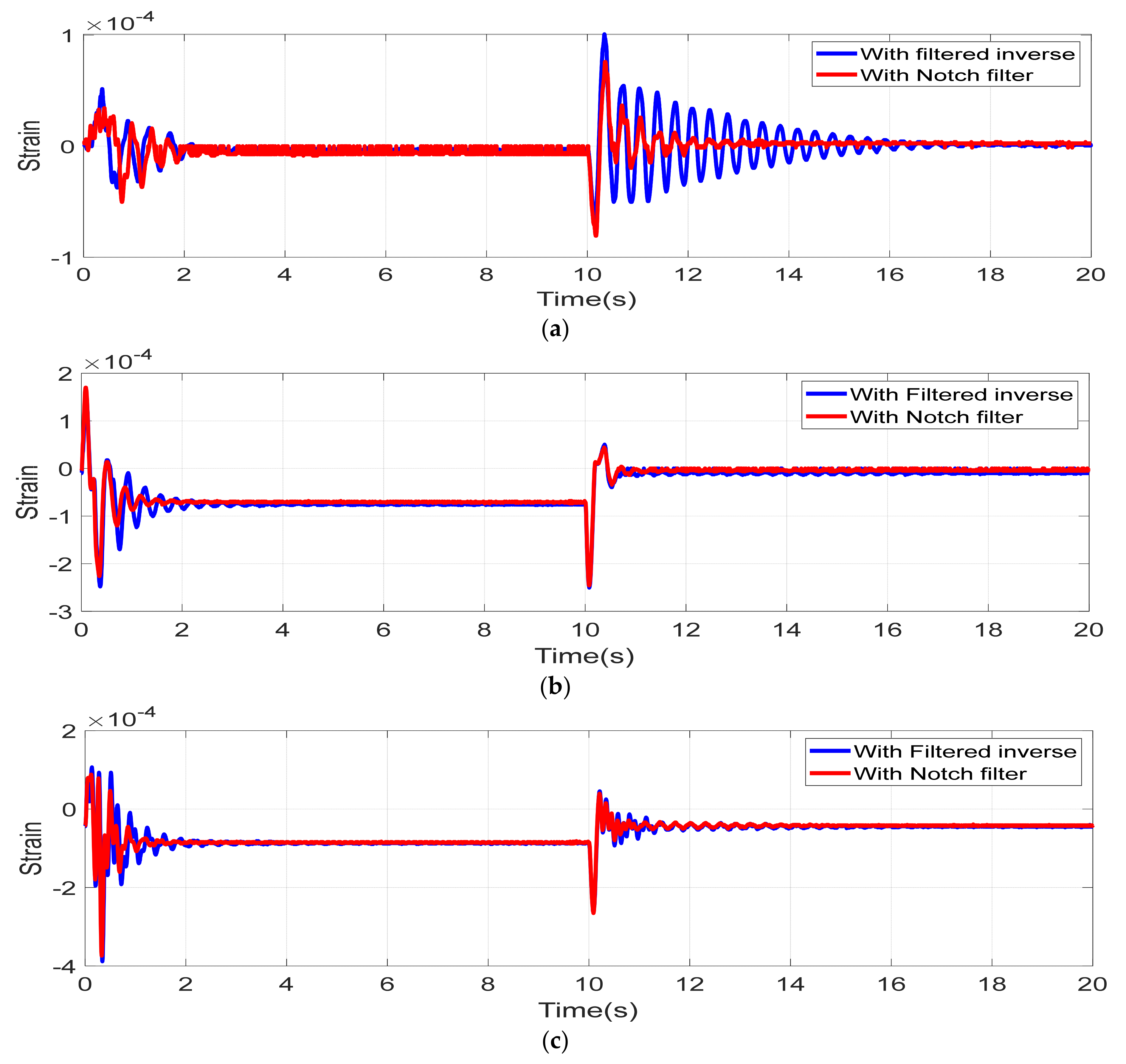
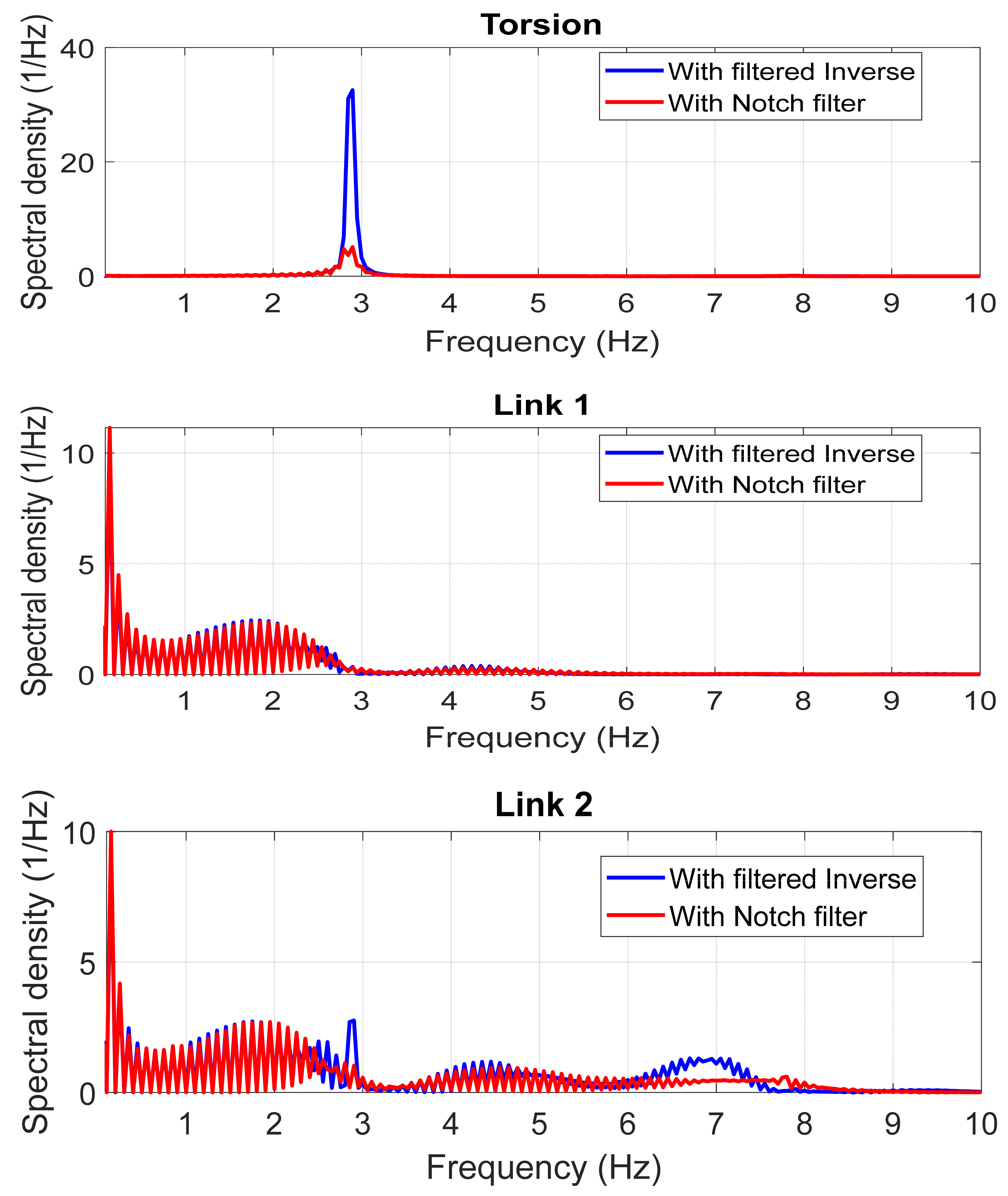
3. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1–22. [Google Scholar] [CrossRef]
- Ito, S.; Nishio, S.; Ino, M.; Morita, R.; Matsushita, K.; Sasaki, M. Design and adaptive balance control of a biped robot with fewer actuators for slope walking. Mechatronics 2018, 49, 56–66. [Google Scholar] [CrossRef]
- Antonelli, G.; Antonelli, G. Underwater Robots; Springer: Berlin/Heidelberg, Germany, 2014; Volume 3. [Google Scholar]
- Leutenegger, S.; Hürzeler, C.; Stowers, A.K.; Alexis, K.; Achtelik, M.W.; Lentink, D.; Oh, P.Y.; Siegwart, R. Flying Robots–Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 623–670. [Google Scholar]
- Sasaki, M.; Kunii, E.; Uda, T.; Matsushita, K.; Muguro, J.K.; bin Suhaimi, M.S.; Njeri, W. Construction of an Environmental Map including Road Surface Classification Based on a Coaxial Two-Wheeled Robot. J. Sustain. Res. Eng. 2020, 5, 159–169. [Google Scholar]
- Lochan, K.; Roy, B.; Subudhi, B. A review on two-link flexible manipulators. Annu. Rev. Control. 2016, 42, 346–367. [Google Scholar] [CrossRef]
- Uchiyama, M. Compensability of flexible arms. J. Robot. Soc. Jpn. 1988, 6, 455–458. [Google Scholar] [CrossRef]
- Moallem, M.; Khorasani, K.; Patel, R. Tip position tracking of flexible multi-link manipulators: An integral manifold approach. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 3, pp. 2432–2437. [Google Scholar] [CrossRef]
- Sasaki, M.; Shimasaki, H.; Itou, S.; Shimizu, T. 1A1-E18 Modeling and Motion control of a Flexible Manipulator Using a Formula Manipulation. In Proceedings of JSME Annual Conference on Robotics and Mechatronics (Robomec); The Japan Society of Mechanical Engineers: Tokyo, Japan, 2010; Volume 2010. [Google Scholar] [CrossRef]
- Thomsen, D.K.; Søe-Knudsen, R.; Balling, O.; Zhang, X. Vibration control of industrial robot arms by multi-mode time-varying input shaping. Mech. Mach. Theory 2021, 155, 104072. [Google Scholar] [CrossRef]
- Wang, X.; Shi, L.; Katupitiya, J. Coordinated control of a dual-arm space robot to approach and synchronise with the motion of a spinning target in 3D space. Acta Astronaut. 2020, 176, 99–110. [Google Scholar] [CrossRef]
- Muthugala, M.V.J.; Samarakoon, S.B.P.; Elara, M.R. Toward energy-efficient online Complete Coverage Path Planning of a ship hull maintenance robot based on Glasius Bio-inspired Neural Network. Expert Syst. Appl. 2021, 187, 115940. [Google Scholar] [CrossRef]
- Yavuz, Ş.; Malgaca, L.; Karagülle, H. Vibration control of a single-link flexible composite manipulator. Compos. Struct. 2016, 140, 684–691. [Google Scholar] [CrossRef]
- Luo, Z.-H. Direct strain feedback control of flexible robot arms: New theoretical and experimental results. IEEE Trans. Autom. Control. 1993, 38, 1610–1622. [Google Scholar] [CrossRef]
- Luo, Z.; Matsuno, F.; Sakawa, Y. Experimental Study on Feedback Control of Coupled Bending and Torsional Vibrations of Flexible Beams. IFAC Proc. Vol. 1989, 22, 327–332. [Google Scholar] [CrossRef]
- Njeri, W.; Sasaki, M.; Matsushita, K. Gain Tuning for High-Speed Vibration Control of a Multilink Flexible Manipulator Using Artificial Neural Network. J. Vib. Acoust. 2019, 141, 1–42. [Google Scholar] [CrossRef]
- Sasaki, M.; Honda, N.; Njeri, W.; Matsushita, K.; Ngetha, H. Gain Tuning using Neural Network for contact force control of flexible arm. J. Sustain. Res. Eng. 2020, 5, 138–148. [Google Scholar]
- Sasaki, M.; Wada, T.; Funato, T.; Ito, A. 2 degrees of freedom control of a 2-link flexible manipulator. In Proceedings of the 23rd Electromagnetics Dynamics Symposium, Marrakesh, Morocco, 20–23 March 2011; pp. 201–206. [Google Scholar]
- Yao, L.; Gao, Q.; Zhang, D.; Zhang, W.; Chen, Y. An Integrated Compensation Method for the Force Disturbance of a Six-Axis Force Sensor in Complex Manufacturing Scenarios. Sensors 2021, 21, 4706. [Google Scholar] [CrossRef] [PubMed]
- Yamawaki, T.; Yashima, M. Effect of gravity on manipulation performance of a robotic arm. In Proceedings of the Proceedings—IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; Volume 1, pp. 4407–4413. [Google Scholar] [CrossRef]
- Sasaki, M.; Miyabe, R.; Njeri, W.; Matsushita, K. Two-Degree-of-Freedom Control of Flexible Manipulator Using Adaptive Notch Filter and Strain Feedback. In Proceedings of the 2019 4th Asia-Pacific Conference on Intelligent Robot Systems ACIRS 2019, Nagoya, Japan, 13–15 July 2019; pp. 32–38. [Google Scholar] [CrossRef]
- Morris, A.; Madani, A. Static and dynamic modelling of a two-flexible-link robot manipulator. Robotica 1996, 14, 289–300. [Google Scholar] [CrossRef]
- Subudhi, B.; Morris, A. Dynamic modelling, simulation and control of a manipulator with flexible links and joints. Robot. Auton. Syst. 2002, 41, 257–270. [Google Scholar] [CrossRef]
- Shimizu, T.; Sasaki, M. The Passivity of a Two-Degree of Freedom Flexible Manipulator. Trans. Soc. Instrum. Control. Eng. 2002, 38, 862–867. [Google Scholar] [CrossRef]
- Njeri, W.; Sasaki, M.; Matsushita, K. Strain feedback gain tuning using neural network for the vibration control in a multilink flexible manipulator. In Proceedings of the JSME Annual Conference on Robotics and Mechatronics (Robomec); The Japan Society of Mechanical Engineers: Tokyo, Japan, 2018; Volume 2018. [Google Scholar] [CrossRef]
- Njeri, W.; Sasaki, M.; Matsushita, K. Enhanced vibration control of a multilink flexible manipulator using filtered inverse controller. Robomech. J. 2018, 5, 28. [Google Scholar] [CrossRef]
- Njeri, W.; Sasaki, M.; Matsushita, K. Two Degree-of-Freedom Vibration Control of a 3D, 2 Link Flexible Manipulator. Adv. Sci. Technol. Eng. Syst. J. 2018, 3, 412–424. [Google Scholar] [CrossRef]
- Regalia, P. An improved lattice-based adaptive IIR notch filter. IEEE Trans. Signal Process. 1991, 39, 2124–2128. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Specifications | ||
|---|---|---|---|
| Motor 1 | Type | V511-012EL8 | units |
| Rated power | 105 | W | |
| Rated spindle speed | 3000 | Rpm | |
| Rated torque | 0.326 | N·m | |
| Maximum torque | 0.784 | N·m | |
| Mass | 1.1 | Kg | |
| Motor 2 | Type | V404-012EL8 | |
| Rated power | 39 | W | |
| Rated spindle speed | 3000 | Rpm | |
| Rated torque | 0.11 | N·m | |
| Maximum torque | 0.323 | N·m | |
| Mass | 0.55 | kg | |
| Encoder | Resolution | 1000 | P/R |
| Type | Incremental | ||
| Reduction Gear Joint 1 | Reduction ratio | 1/100 | |
| Mass | 0.15 | kg | |
| Type | CSF-40-100-2AR-SP | ||
| Reduction Gear Joint 2 | Reduction ratio | 1/100 | |
| Mass | 0.09 | kg | |
| Type | CSF-17-1002ª-R-SP | ||
| Link 1 | Length | 0.44 | m |
| Radius | 0.005 | m | |
| Material | Stainless | ||
| Link 2 | Length | 0.44 | m |
| Radius | 0.004 | m | |
| Material | Aluminum | ||
| Strain Gauge | Type | KGF-2-120-C1-23L1M2R | |
| State No. | State | Variable | Description |
|---|---|---|---|
| 1 | x1(t) | i1(t) | Armature current of motor 1 |
| 2 | x2(t) | w11(t) | Link flexure of link 1, part I |
| 3 | x3(t) | 11(t) | Time derivative of link flexure of link 1, part I |
| 4 | x4(t) | w12(t) | Link flexure of link 1, part II |
| 5 | x5(t) | 12(t) | Time derivative of link flexure of link 1, part II |
| 6 | x6(t) | w21(t) | Link flexure of link 2, part I |
| 7 | x7(t) | 21(t) | Time derivative of link flexure of link 2, part I |
| 8 | x8(t) | w22(t) | Link flexure of link 2, part II |
| 9 | x9(t) | 22(t) | Time derivative of link flexure of link 2, part II |
| 10 | x10(t) | θ1(t) | Angle, joint 1 |
| 11 | x11(t) | 1(t) | Velocity, joint 1 |
| 12 | x12(t) | θ2(t) | Angle, joint 2 |
| 13 | x13(t) | 2(t) | Velocity, joint 2 |
| 14 | x14(t) | θ3(t) | Angle, joint 3 |
| 15 | x15(t) | 3(t) | Velocity, joint 3 |
| 16 | x16(t) | i3(t) | Armature current of motor 3 |
| 17 | x17(t) | i2(t) | Armature current of motor 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sasaki, M.; Muguro, J.; Njeri, W.; Doss, A.S.A. Adaptive Notch Filter in a Two-Link Flexible Manipulator for the Compensation of Vibration and Gravity-Induced Distortion. Vibration 2023, 6, 286-302. https://doi.org/10.3390/vibration6010018
Sasaki M, Muguro J, Njeri W, Doss ASA. Adaptive Notch Filter in a Two-Link Flexible Manipulator for the Compensation of Vibration and Gravity-Induced Distortion. Vibration. 2023; 6(1):286-302. https://doi.org/10.3390/vibration6010018
Chicago/Turabian StyleSasaki, Minoru, Joseph Muguro, Waweru Njeri, and Arockia Selvakumar Arockia Doss. 2023. "Adaptive Notch Filter in a Two-Link Flexible Manipulator for the Compensation of Vibration and Gravity-Induced Distortion" Vibration 6, no. 1: 286-302. https://doi.org/10.3390/vibration6010018
APA StyleSasaki, M., Muguro, J., Njeri, W., & Doss, A. S. A. (2023). Adaptive Notch Filter in a Two-Link Flexible Manipulator for the Compensation of Vibration and Gravity-Induced Distortion. Vibration, 6(1), 286-302. https://doi.org/10.3390/vibration6010018