
Definition and Validation of Fast Design Procedures for Seismic Isolation Systems


Abstract
:1. Introduction
2. Definition of Fast Design Procedures
- The Design Period Td, which corresponds to the secant period at maximum displacement;
- The Design Equivalent Viscous Damping of the isolation systems ξd.
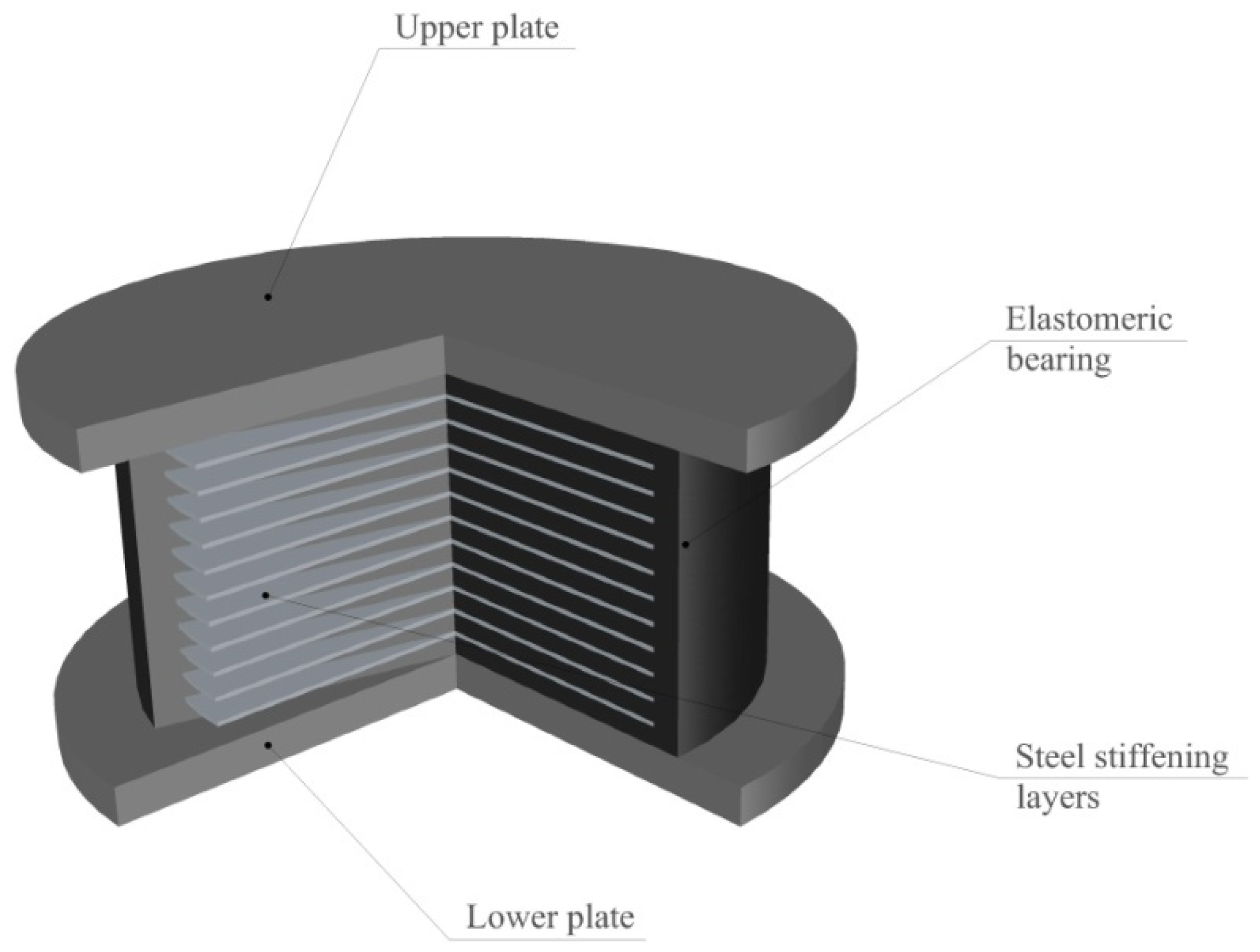
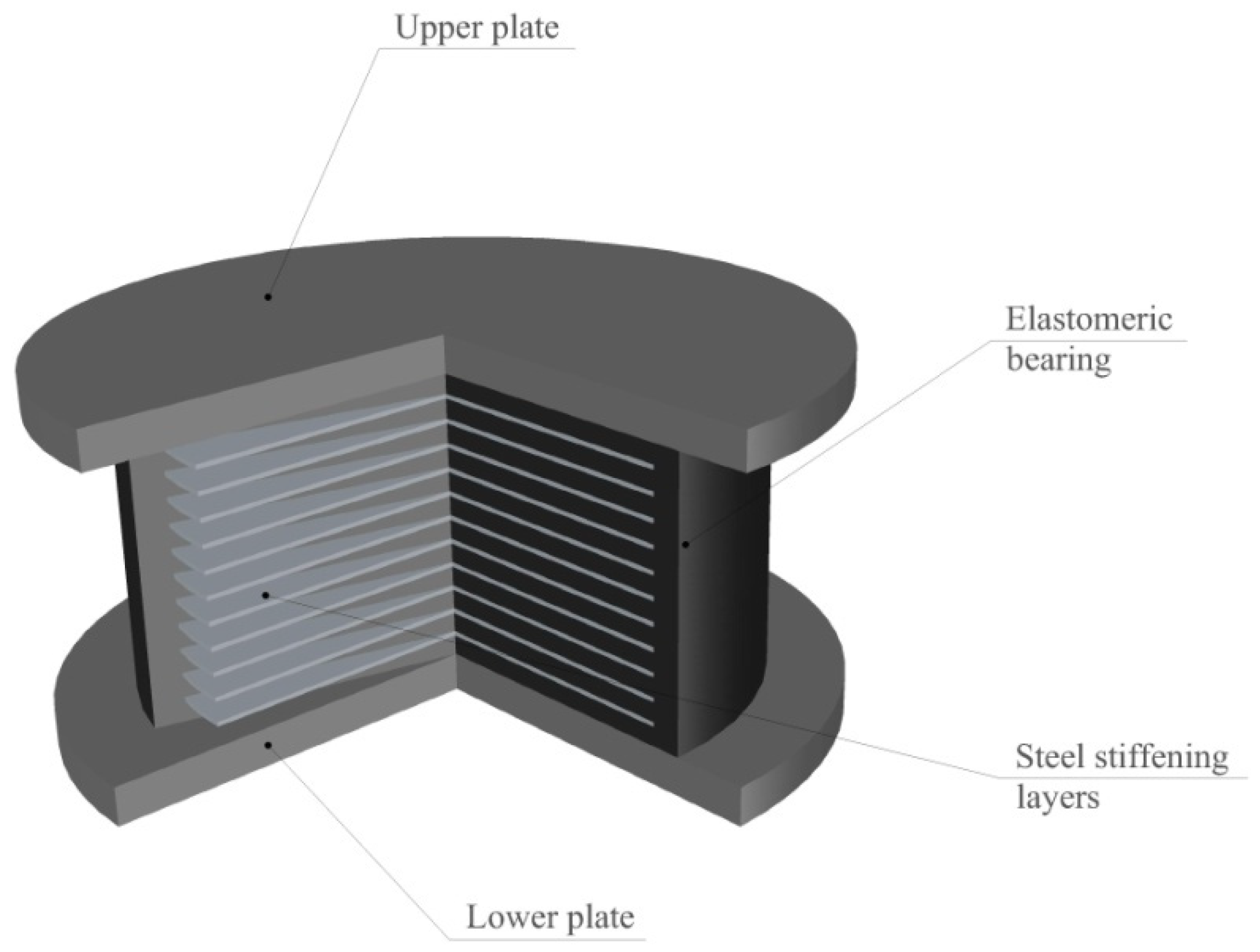
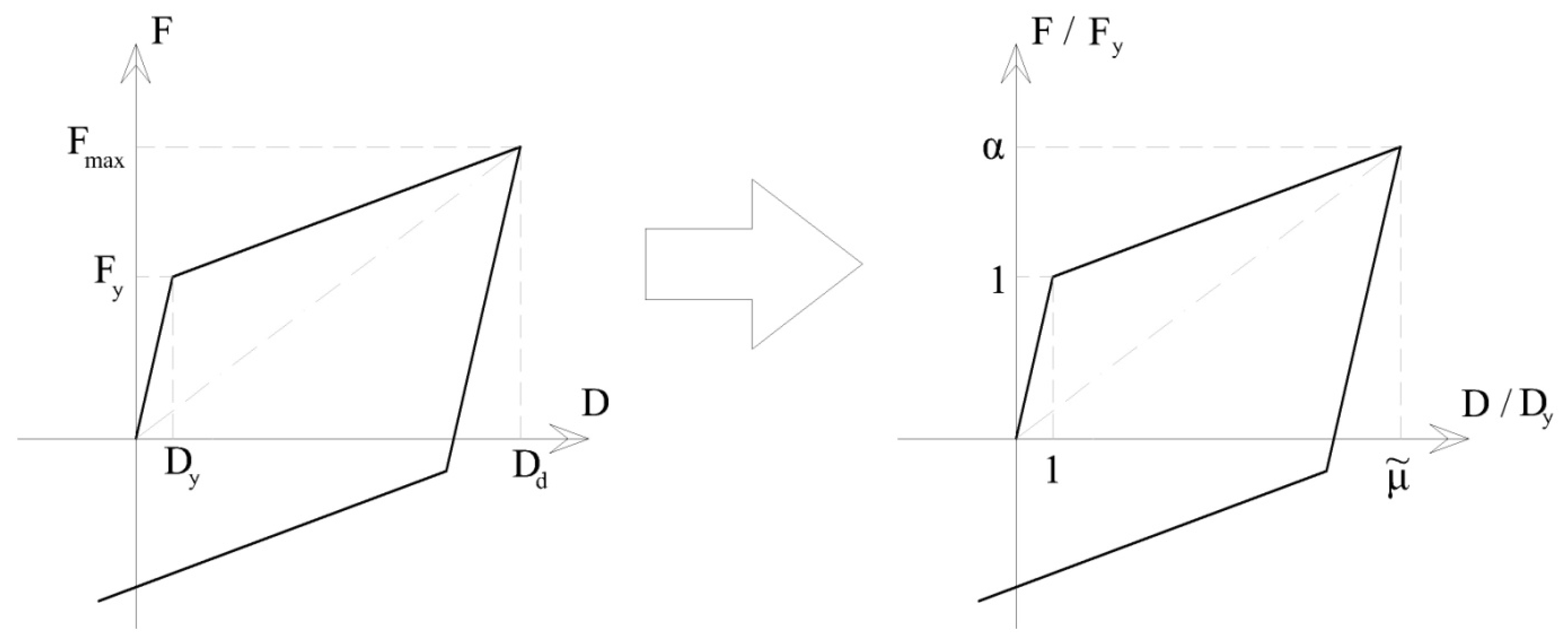
2.1. Low and High Damping Rubber Bearings (LDRB & HDRB)
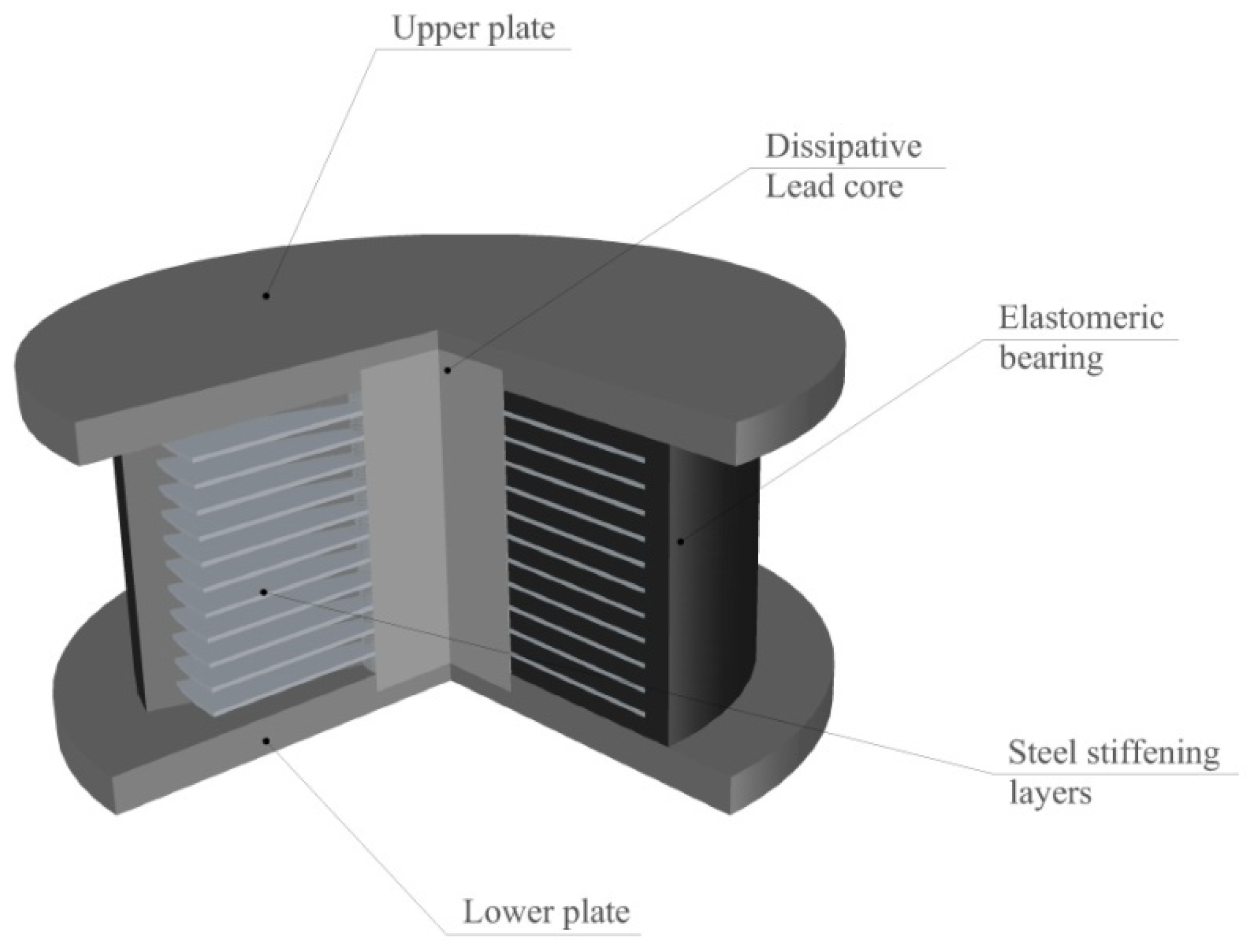
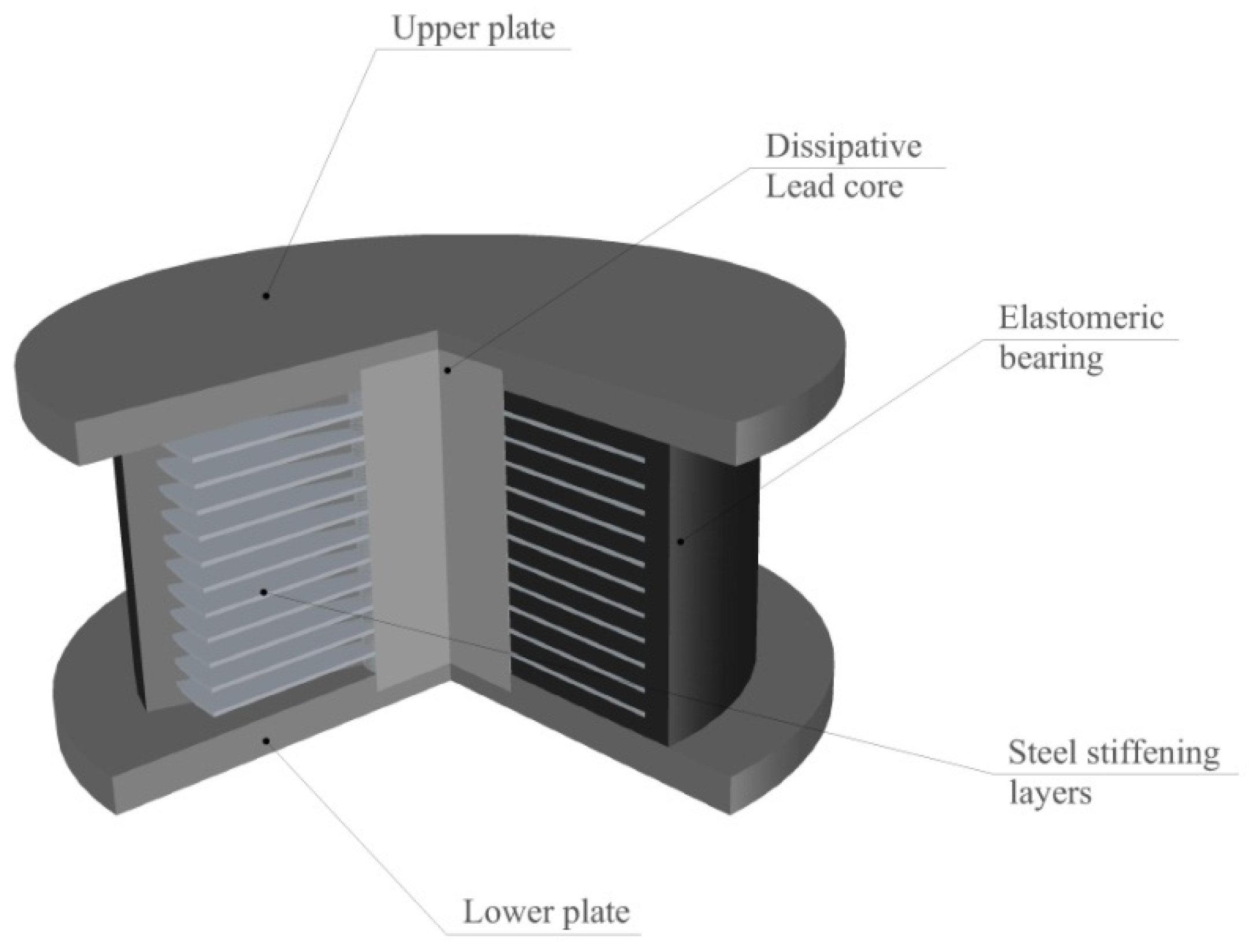
2.2. Lead Rubber Bearings (LRB)
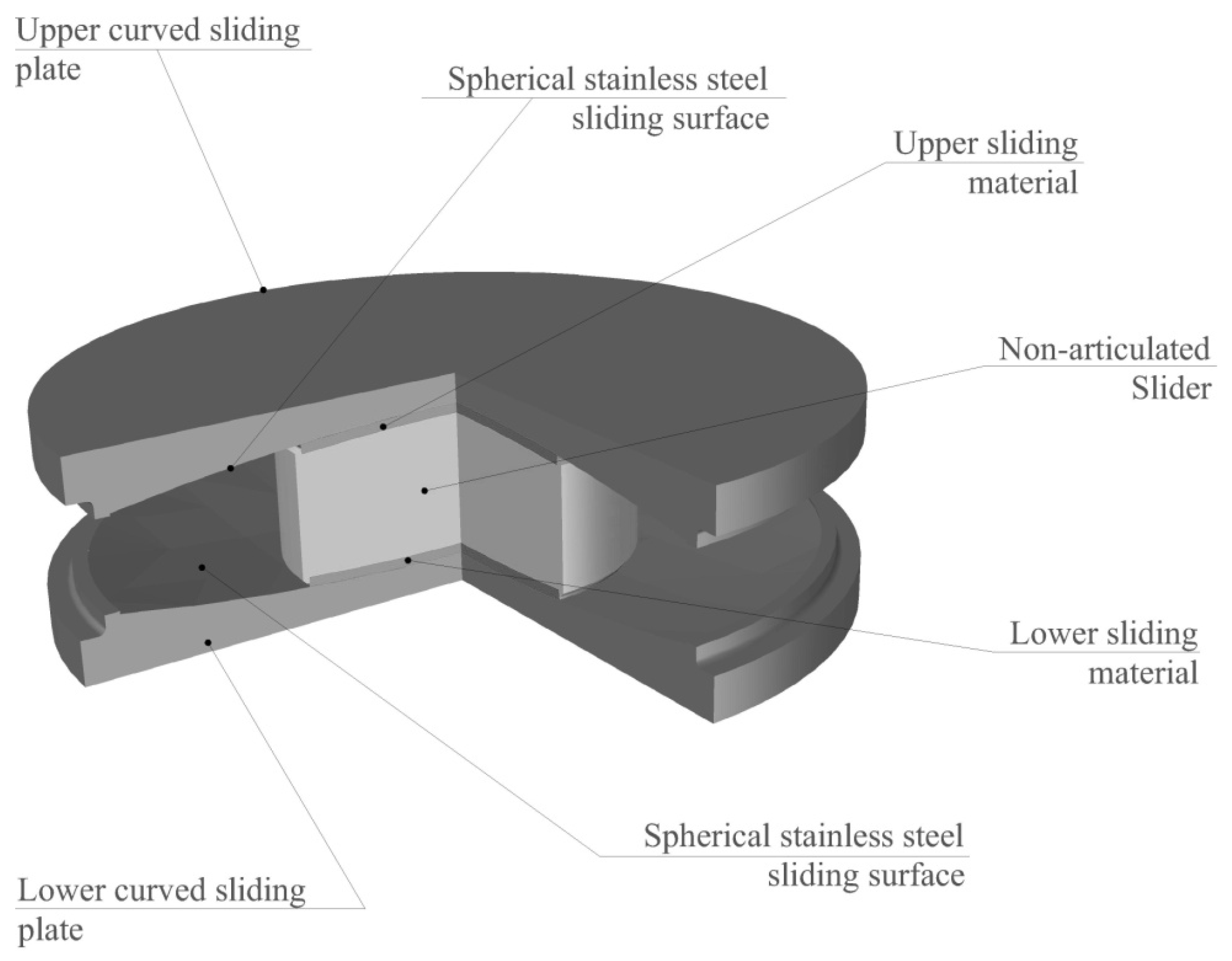
2.3. Curved Surface Sliders (CSS)
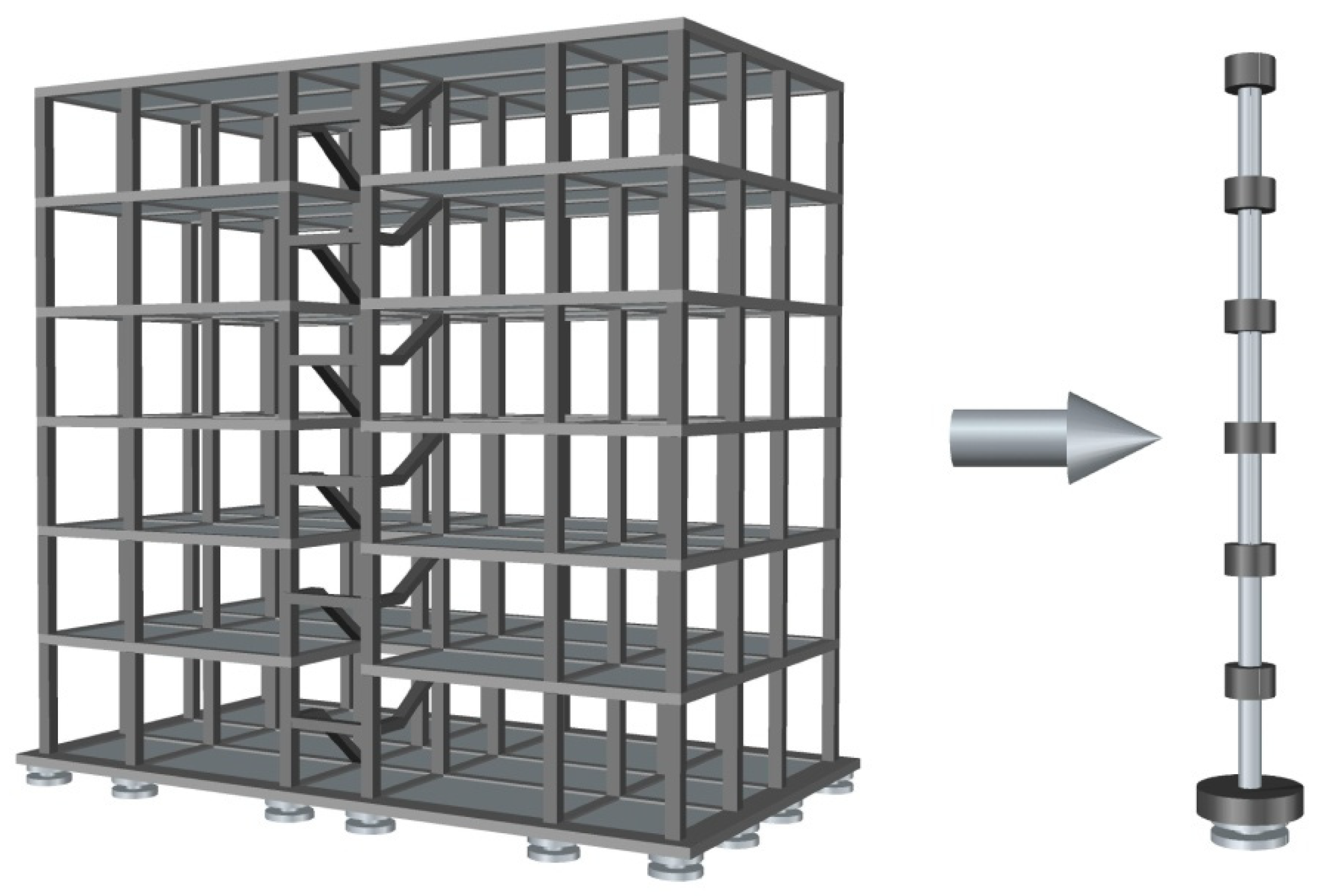
3. Case-Study Structure for Validation Analyses
- A Full-3D model, implemented in the F.E.M. commercial software SAP2000 [21], accounting for linear-elastic beam and columns, with proper non-linear links for isolation devices;
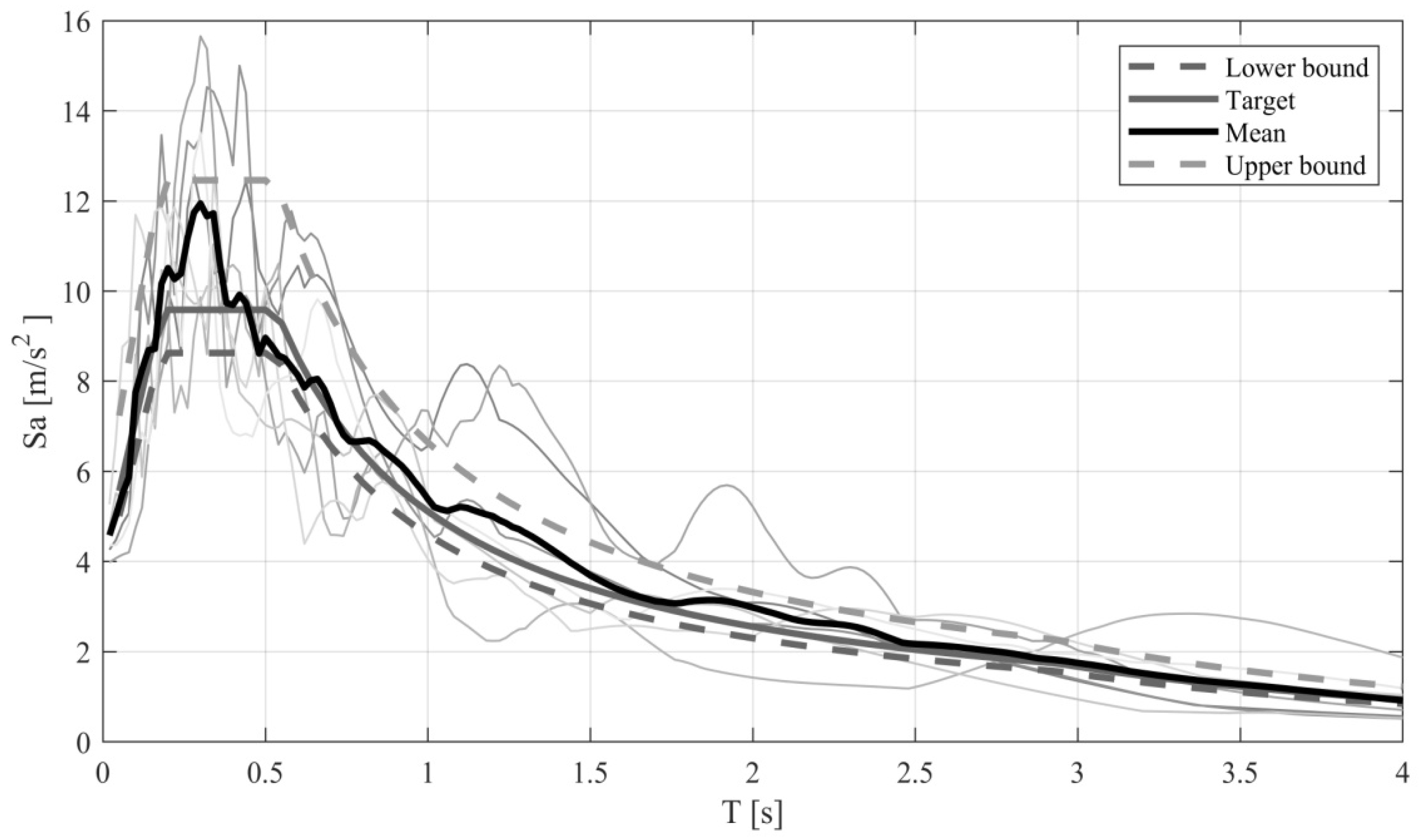
3.1. Definition of the Seismic Input
3.2. Designed Isolation Systems
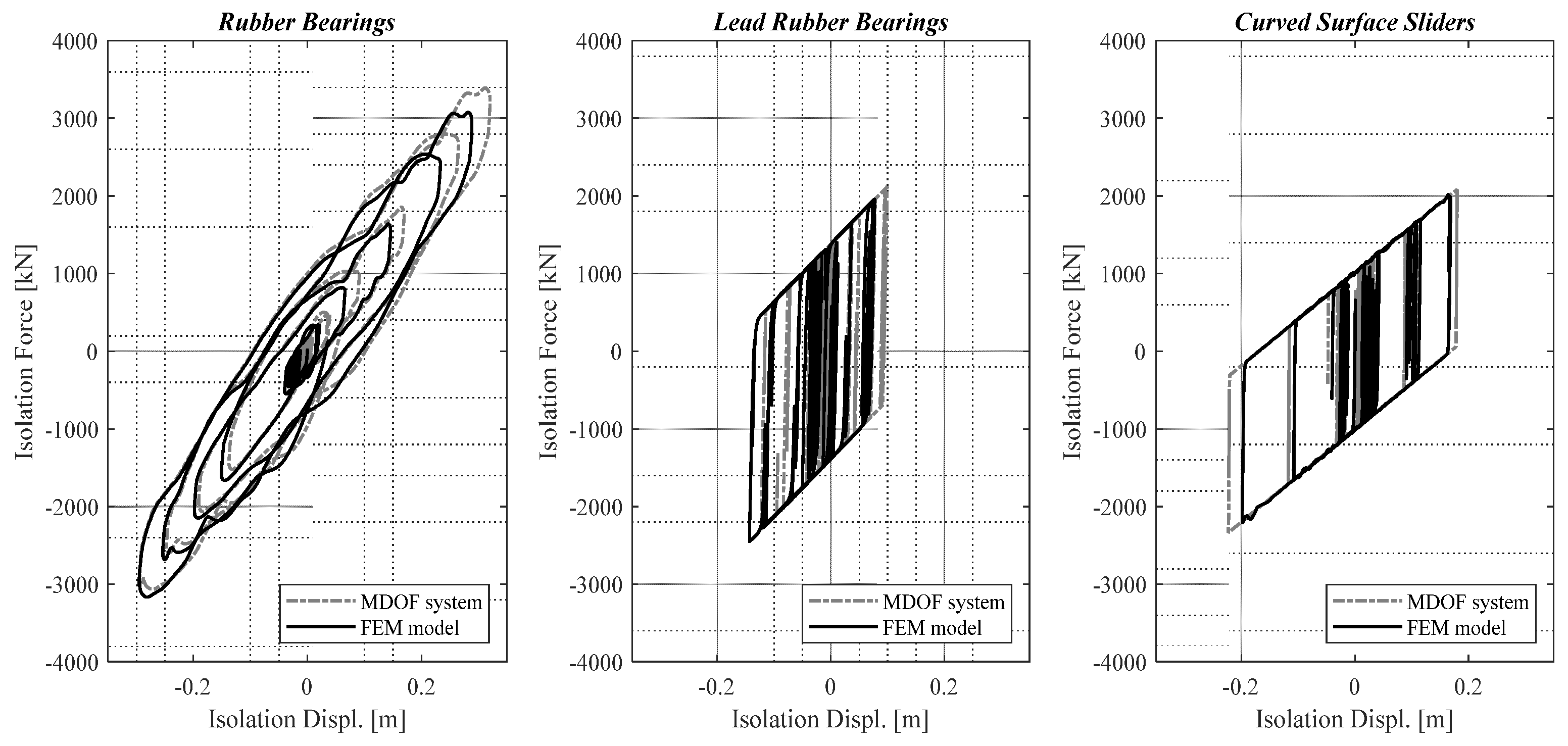
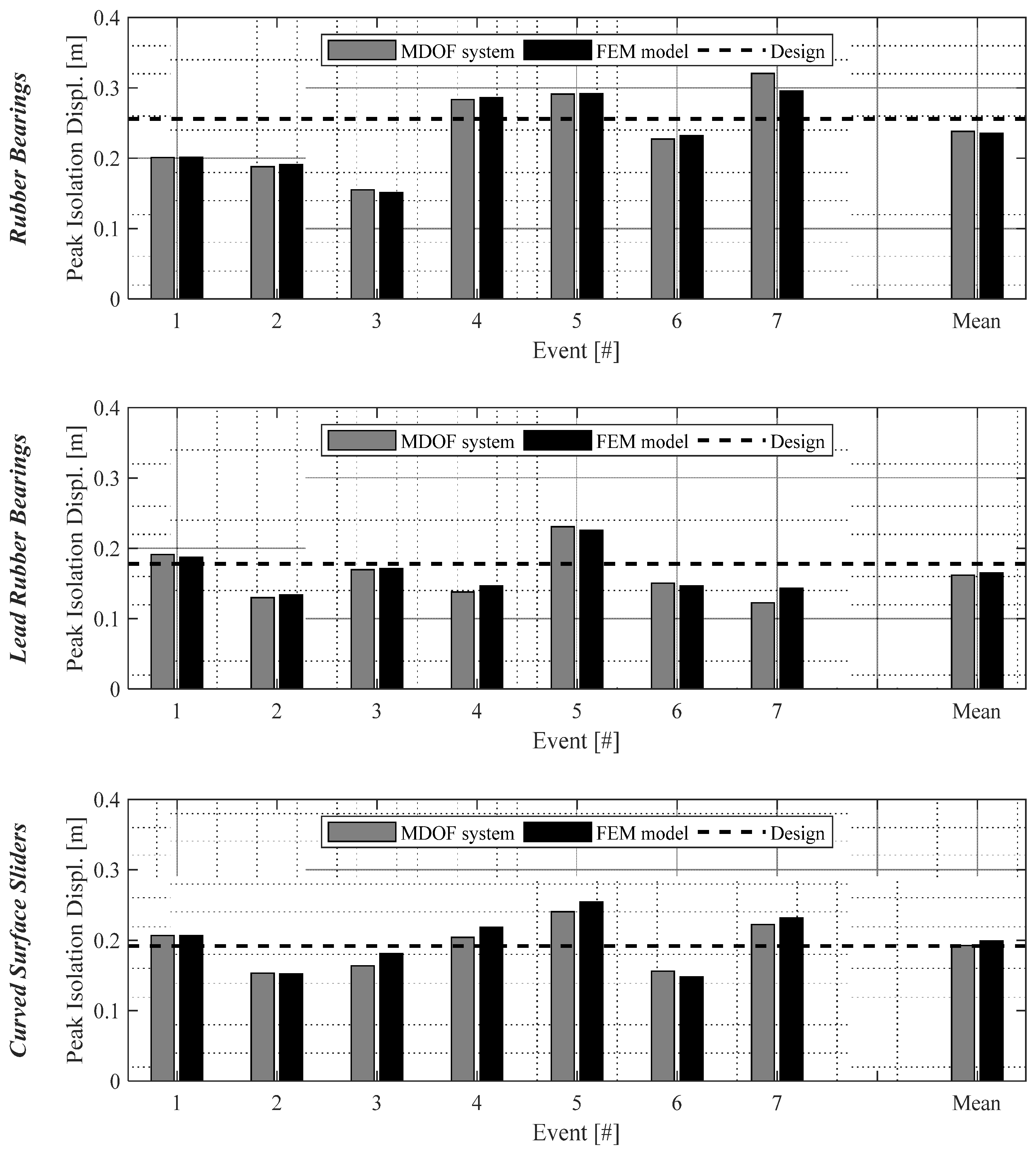
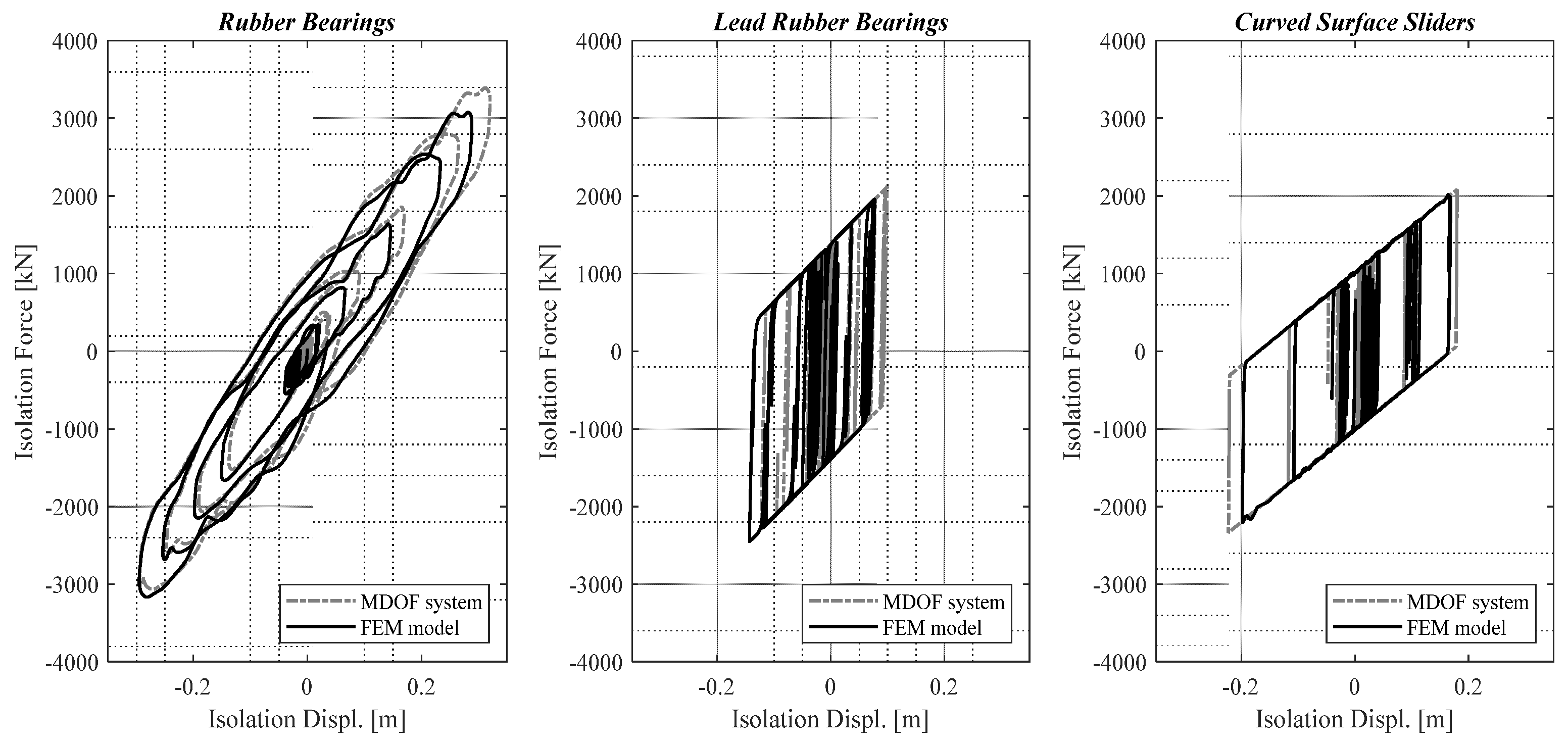
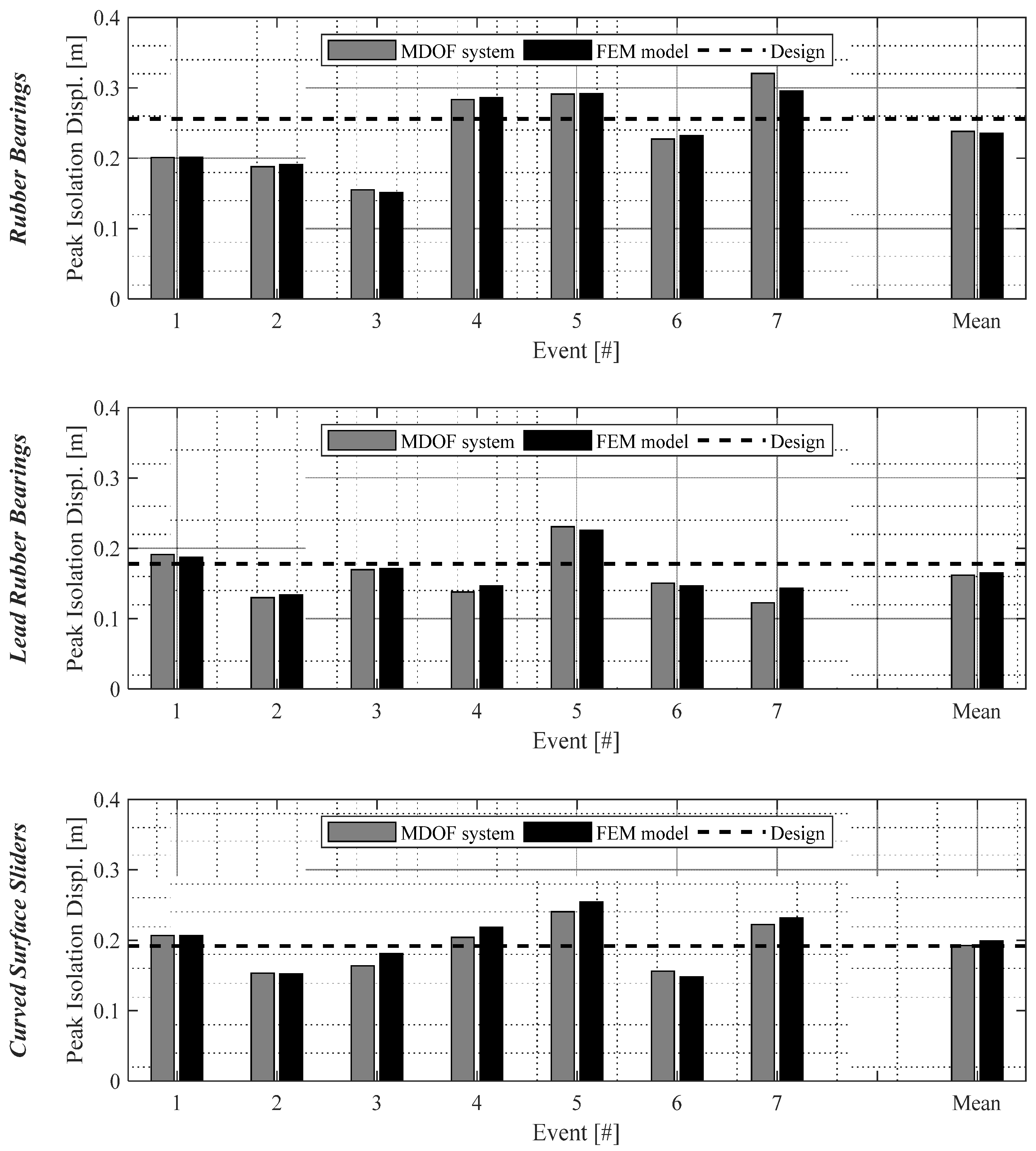
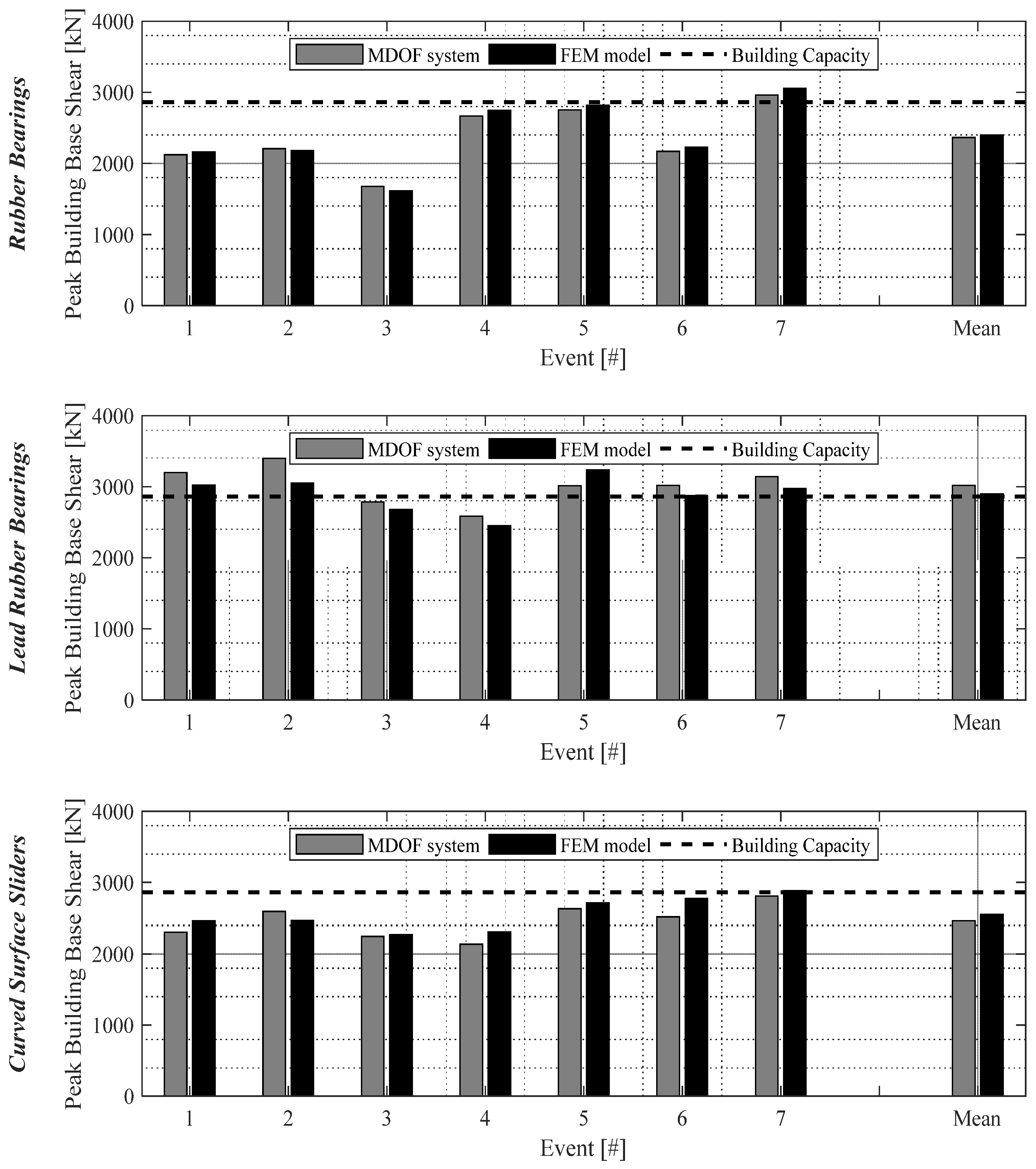
3.3. Validation Results
4. Discussion
5. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Calvi, P.M.; Calvi, G.M. Historical development of friction-based seismic isolation systems. Soil Dyn. Earthq. Eng. 2018, 106, 14–30. [Google Scholar] [CrossRef]
- De Luca, A.; Guidi, L.G. State of art in the worldwide evolution of base isolation design. Soil Dyn. Earthq. Eng. 2019, 125, 105722. [Google Scholar] [CrossRef]
- Dall’Asta, A.; Leoni, G.; Micozzi, F.; Gioiella, L.; Ragni, L. A Resilience and Robustness Oriented Design of Base-Isolated Structures: The New Camerino University Research Center. Front. Built Environ. 2020, 6, 50. [Google Scholar] [CrossRef]
- Tsiavos, A.; Schlatter, D.; Markic, T.; Stojadinovic, B. Shaking table investigation of inelastic deformation demand for a structure isolated using friction-pendulum sliding bearings. Structures 2021, 31, 1041–1052. [Google Scholar] [CrossRef]
- Tsiavos, A.; Sextos, A.; Stavridis, A.; Dietz, M.; Dihoru, L.; Di Michele, F.; Nicholas, A. Low-cost hybrid design of masonry structures for developing countries: Shaking table tests. Soil Dyn. Earthq. Eng. 2021, 146, 106675. [Google Scholar] [CrossRef]
- Constantinou, M.; Mokha, A.; Reinhorn, A. Teflon bearings in base isolation II: Modeling. J. Structral Eng. 1990, 116, 455–474. [Google Scholar] [CrossRef]
- Constantinou, M.C.; Tsopelas, P.; Kasalanati, A.; Wolff, E. Property Modification Factors for Seismic Isolation Bearings; Report No. 99-0012; Multidisciplinary Center for Earthquake Engineering Research: Buffalo, NY, USA, 1999.
- De Domenico, D.; Ricciardi, G.; Benzoni, G. Analytical and finite element investigation on the thermo-mechanical coupled response of friction isolators under bidirectional excitation. Soil Dyn. Earthq. Eng. 2018, 106, 131–147. [Google Scholar] [CrossRef]
- Dolce, M.; Cardone, D.; Croatto, F. Frictional behavior of steel-PTFE interfaces for seismic isolation. Bull. Earthq. Eng. 2005, 3, 75–99. [Google Scholar] [CrossRef]
- Fenz, D.; Constantinou, M.C. Behaviour of the double concave friction pendulum bearing. Earthq. Eng. Struct. Dyn. 2006, 35, 1403–1424. [Google Scholar] [CrossRef]
- Kumar, M.; Whittaker, A.S.; Constantinou, M.C. Characterizing friction in sliding isolation bearings. Earthq. Eng. Struct. Dyn. 2015, 44, 1409–1425. [Google Scholar] [CrossRef]
- Mazza, F.; Mazza, M. Sensitivity to modelling and design of curved surface sliding bearings in the nonlinear seismic analysis of base-isolated r.c. framed buildings. Soil Dyn. Earthq. Eng. 2017, 79, 951–970. [Google Scholar] [CrossRef]
- Mokha, A.; Contantinou, M.C.; Reinhorn, A.M. Teflon Bearings in Aseismic Base Isolation: Experimental Studies and Mathematical Modeling; Report No. 88-0038, MCEER; National Center for Earthquake Engineering Research: Buffalo, NY, USA, 1988.
- Yang, T.; Calvi, P.M.; Wiebe, R. Numerical implementation of variable friction sliding base isolators and preliminary experimental results. Earthq. Spectra 2020, 36, 767–787. [Google Scholar] [CrossRef]
- Fenz, D.M.; Constantinou, M.C. Development, Implementation, and Verification of Dynamic Analysis Models for Multi-Spherical Sliding Bearings; Report No. 08-0018, MCEER; State University of New York at Buffalo: Buffalo, NY, USA, 2008. [Google Scholar]
- UNI EN 1998-1; Eurocode 8: Design of Structures for Earthquake Resistance Part 1: General Rules, Seismic Actions and Rules for Buildings. European Committee for Standardization: Brussels, Belgium, 2005.
- Ministero delle Infrastrutture e dei Trasporti. Norme Tecniche per le Costruzioni, Decreto Ministeriale del 17 Gennaio 2018; Italian Building Code; Ministero delle Infrastrutture e dei Trasporti: Rome, Italy, 2018.
- Furinghetti, M.; Pavese, A.; Quaglini, V.; Dubini, P. Experimental Investigation of The Cyclic Response of Double Curved Surface Sliders Subjected to Radial and Bidirectional Sliding Motions. Soil Dyn. Earthq. Eng. 2019, 117, 190–202. [Google Scholar] [CrossRef]
- Jacobsen, L.S. An Approximate Solution of the Steady Forced Vibration of a System of One Degree of Freedom under the Influence of Various Types of Damping. Bull. Seismol. Soc. Am. 1930, 20, 196–223. [Google Scholar] [CrossRef]
- Cardone, D.; Conte, N.; Dall’Asta, A.; Di Cesare, A.; Flora, A.; Lamarucciola, F.; Micozzi, F.; Ponzo, F.C.; Ragni, L. RINTC_E project: The seismic risk of existing Italian RC buildings retrofitted with seismic isolation. In Proceedings of the COMPDYN 2019, 7th ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Crete, Greece, 24–26 June 2019. [Google Scholar]
- Computers and Structures Inc. SAP2000 Ultimate: Structural Analysis Program. Version 21.2.0. 2021. Available online: http://www.https://www.csi-italia.eu/ (accessed on 26 April 2022).
- Furinghetti, M.; Lanese, I.; Pavese, A. Experimental assessment of the seismic response of a base isolated building through hybrid simulation technique. Front. Built Environ. 2020, 6, 33. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures Theory and Applications to Earthquake Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Iervolino, I.; Galasso, C.; Cosenza, E. REXEL: Computer aided record selection for code-based seismic structural analysis. Bull. Earthq. Eng. 2009, 8, 339–362. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
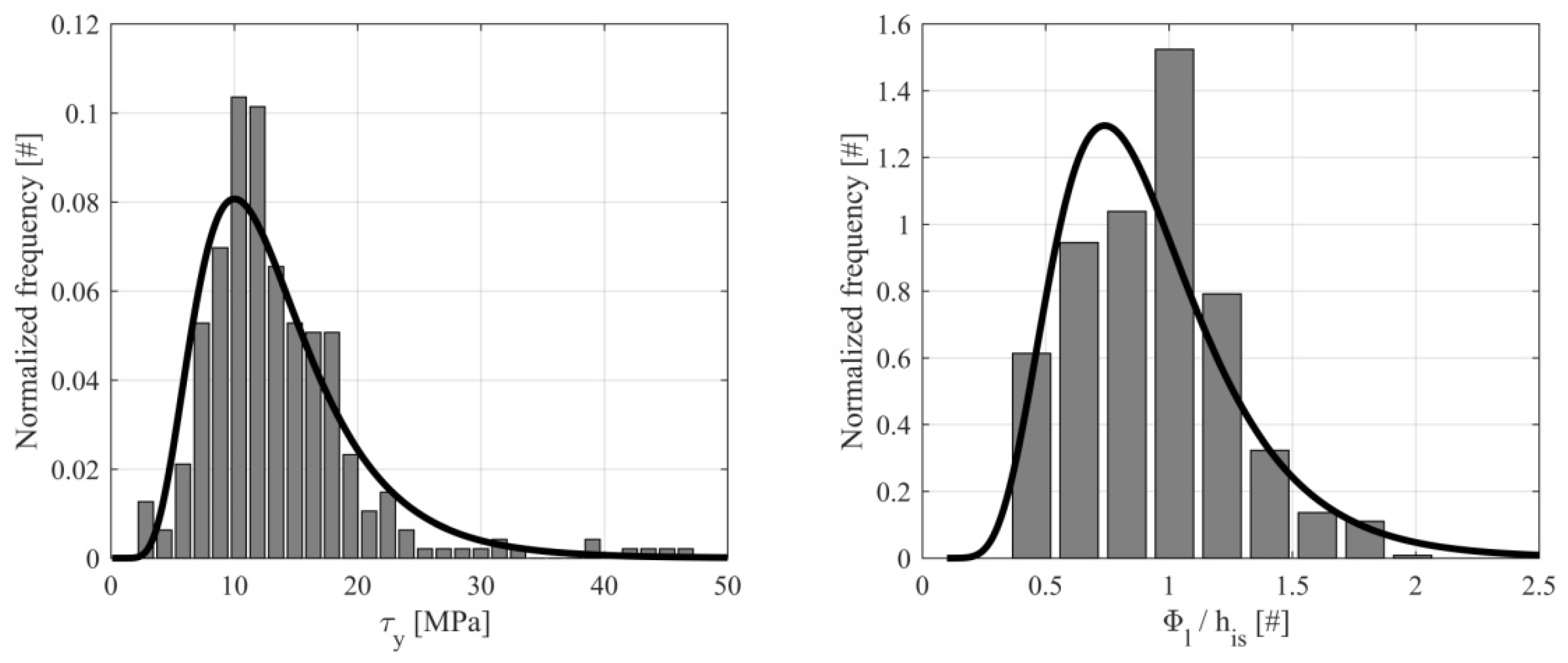
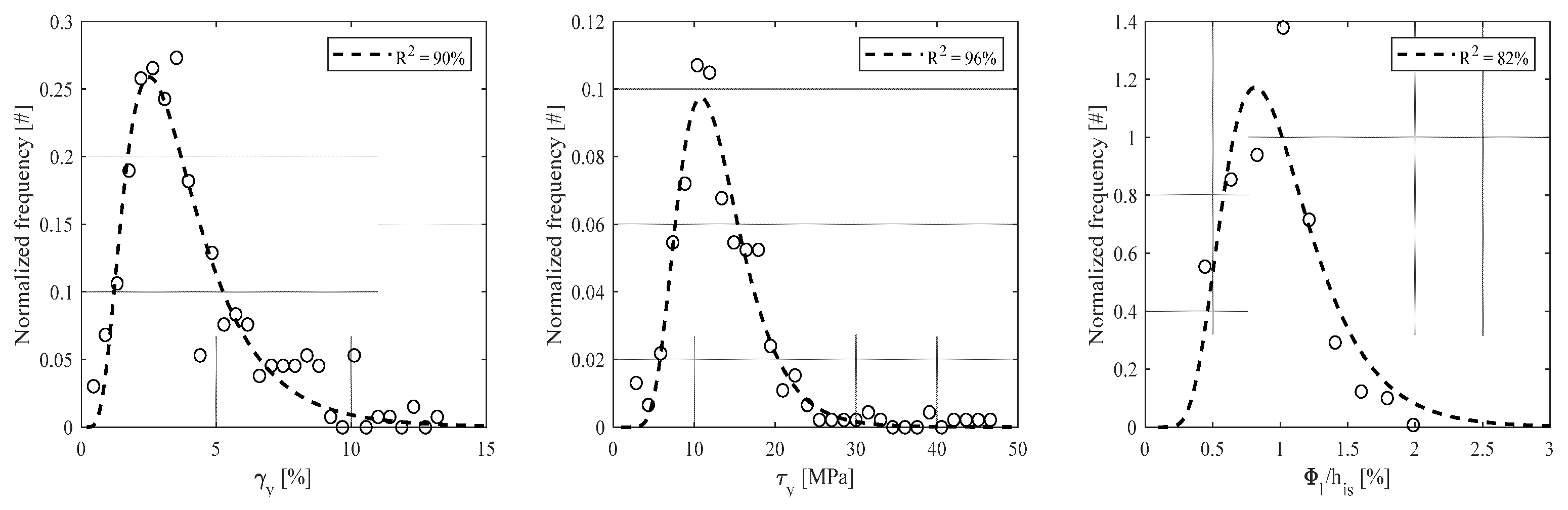
| μ | σ | Mean | Median | Mode | |
|---|---|---|---|---|---|
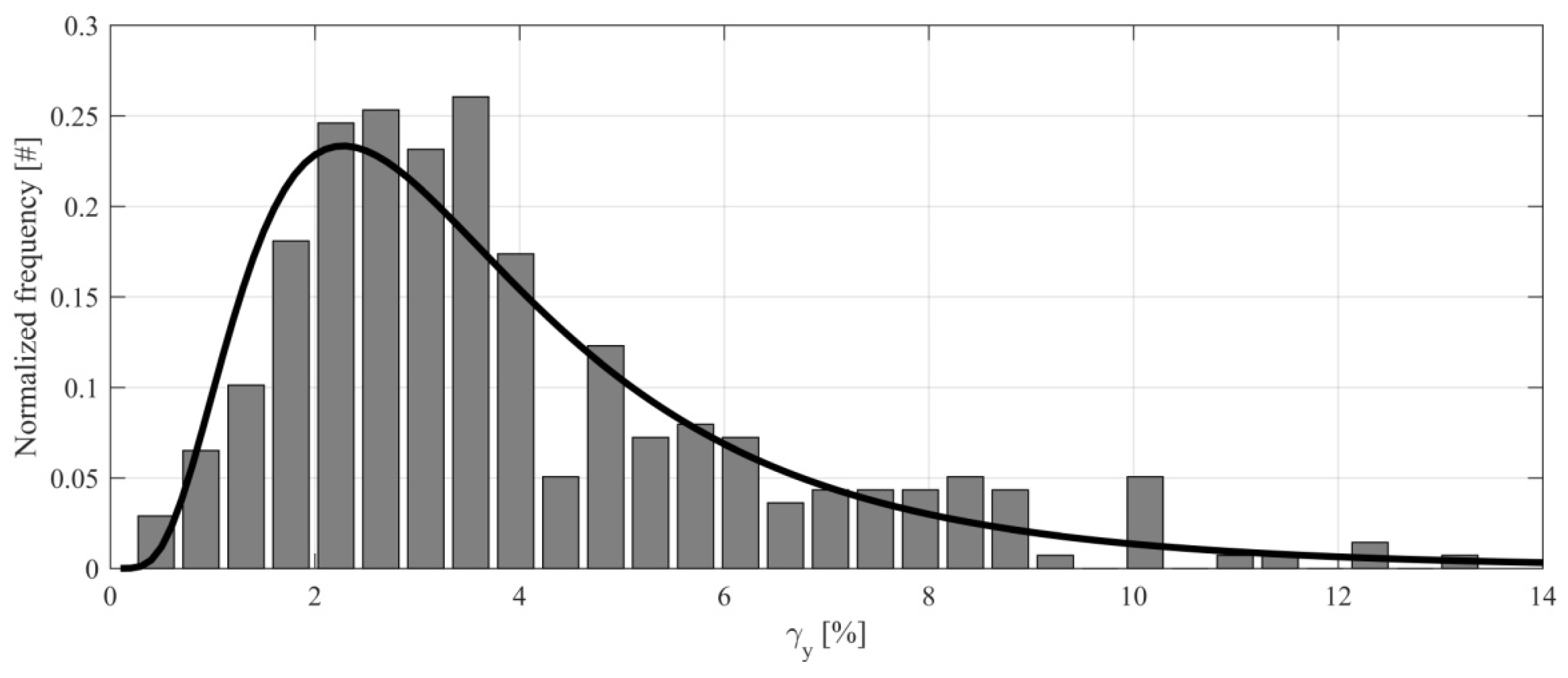
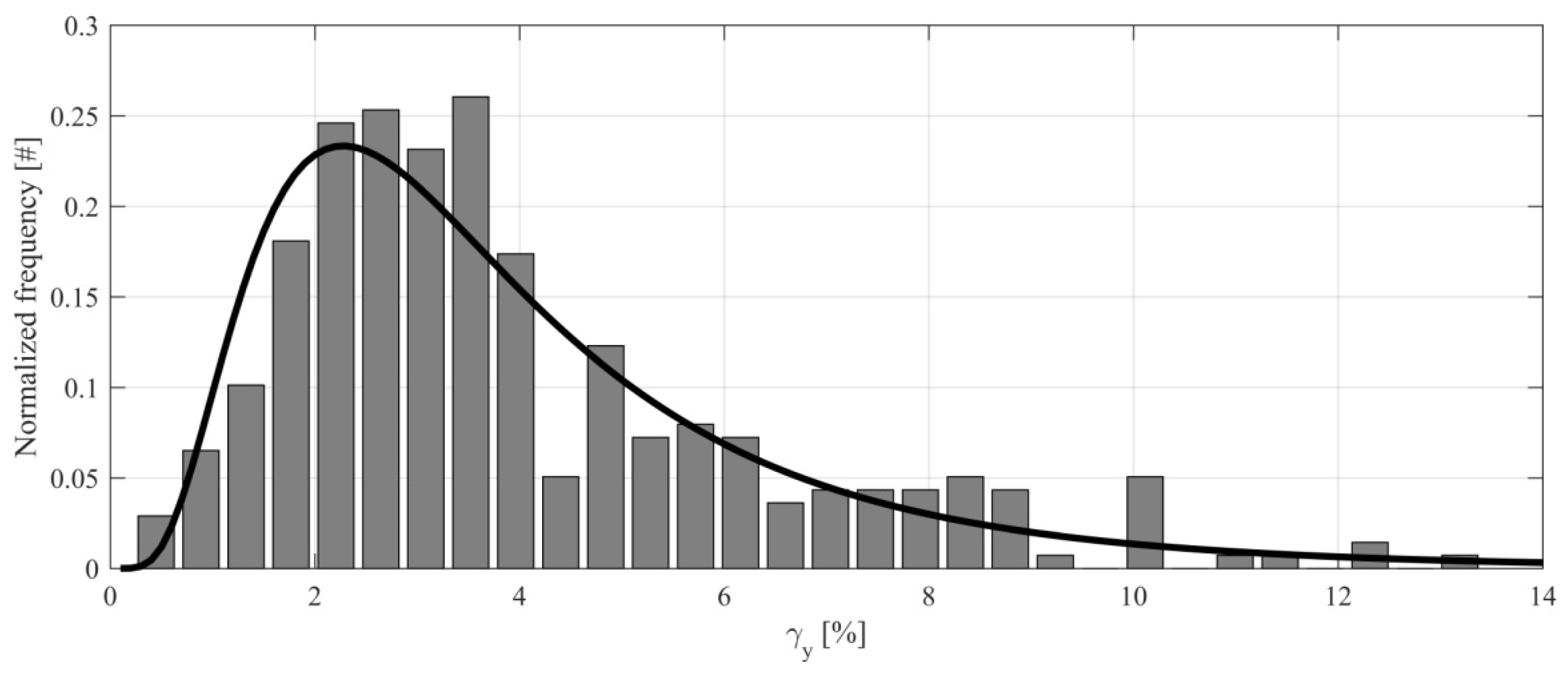
| ɣy [%] | 1.208 | 0.532 | 3.9 | 3.3 | 2.5 |
| τy [MPa] | 2.509 | 0.355 | 13.1 | 12.3 | 10.8 |
| Φl/his [#] | −0.054 | 0.388 | 1.0 | 0.9 | 0.8 |
| Event [#] | Station ID | Earthquake Name | Date | Mw | Fault Mechanism | Epicentral Distance [km] | Original PGA [g] | Scaled PGA [g] | Scale Factor [#] |
|---|---|---|---|---|---|---|---|---|---|
| 1 | ST164(x) | Kalamata | 13/09/1986 | 5.9 | normal | 10.0 | 0.215 | 0.429 | 2.00 |
| 2 | ST163(x) | Kalamata | 13/09/1986 | 5.9 | normal | 11.0 | 0.240 | 0.479 | 2.00 |
| 3 | ST271(y) | Dinar | 01/10/1995 | 6.4 | normal | 8.0 | 0.319 | 0.404 | 1.27 |
| 4 | ST561(x) | Izmit | 17/08/1999 | 7.6 | strike slip | 47.0 | 0.238 | 0.475 | 2.00 |
| 5 | EC04(y) | Imperial Valley | 15/10/1979 | 6.5 | strike-slip | 27.0 | 0.485 | 0.485 | 1.00 |
| 6 | EC05(y) | Imperial Valley | 15/10/1979 | 6.5 | strike-slip | 27.7 | 0.519 | 0.519 | 1.00 |
| 7 | ERZ(x) | Erzincan | 13/03/1992 | 6.6 | strike-slip | 9.0 | 0.495 | 0.446 | 0.90 |
| Td [sec] | ξd [%] | his [mm] | ɣd [%] | Gr [MPa] | Φr [mm] | nis [mm] |
|---|---|---|---|---|---|---|
| 2.8 | 15 | 256 | 100% | 1 | 512 | 12 |
| Td [sec] | ξd [%] | his [mm] | ɣd [%] | Gr [MPa] | Φl [mm] | Φr [mm] | nis [mm] |
|---|---|---|---|---|---|---|---|
| 2.5 | 30 | 169 | 105% | 1 | 136 | 469 | 8 |
| Td [sec] | ξd [%] | μd [%] | Req [m] |
|---|---|---|---|
| 2.7 | 30 | 4.97 | 3.413 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Furinghetti, M. Definition and Validation of Fast Design Procedures for Seismic Isolation Systems. Vibration 2022, 5, 290-305. https://doi.org/10.3390/vibration5020017
Furinghetti M. Definition and Validation of Fast Design Procedures for Seismic Isolation Systems. Vibration. 2022; 5(2):290-305. https://doi.org/10.3390/vibration5020017
Chicago/Turabian StyleFuringhetti, Marco. 2022. "Definition and Validation of Fast Design Procedures for Seismic Isolation Systems" Vibration 5, no. 2: 290-305. https://doi.org/10.3390/vibration5020017
APA StyleFuringhetti, M. (2022). Definition and Validation of Fast Design Procedures for Seismic Isolation Systems. Vibration, 5(2), 290-305. https://doi.org/10.3390/vibration5020017