
Benchmarking Optimisation Methods for Model Selection and Parameter Estimation of Nonlinear Systems


Abstract
:1. Introduction
2. Methods and Problem Definition
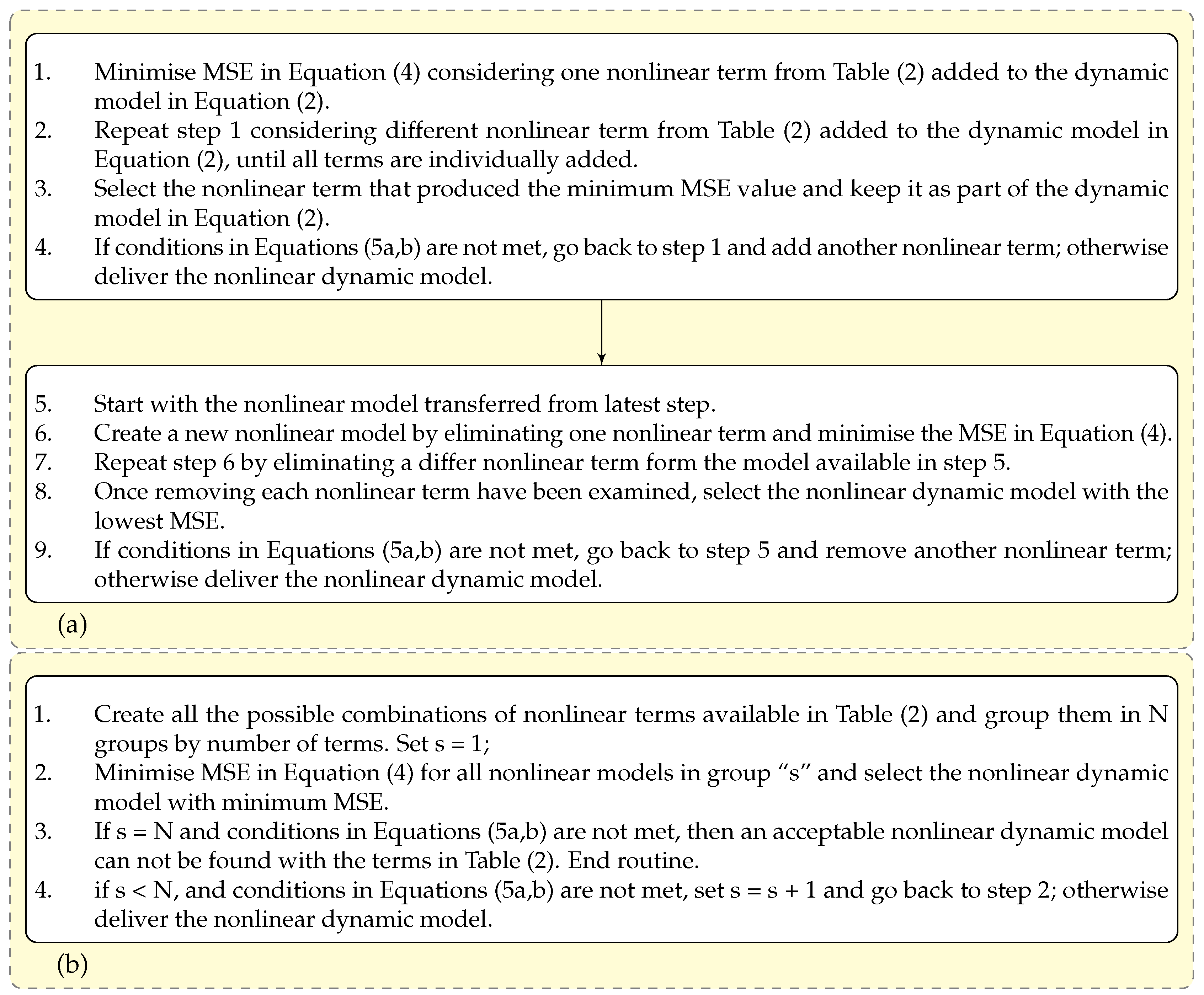
2.1. Nonlinear Model Selection for Dynamic Equations of Engineering Structures
2.2. Initialising, Scaling and Bounding for the Parameters
2.3. Assessed Optimisation Methods
2.4. Parameters of Optimisation and Model Selection Algorithms
2.5. Comparison of Optimisation Methods
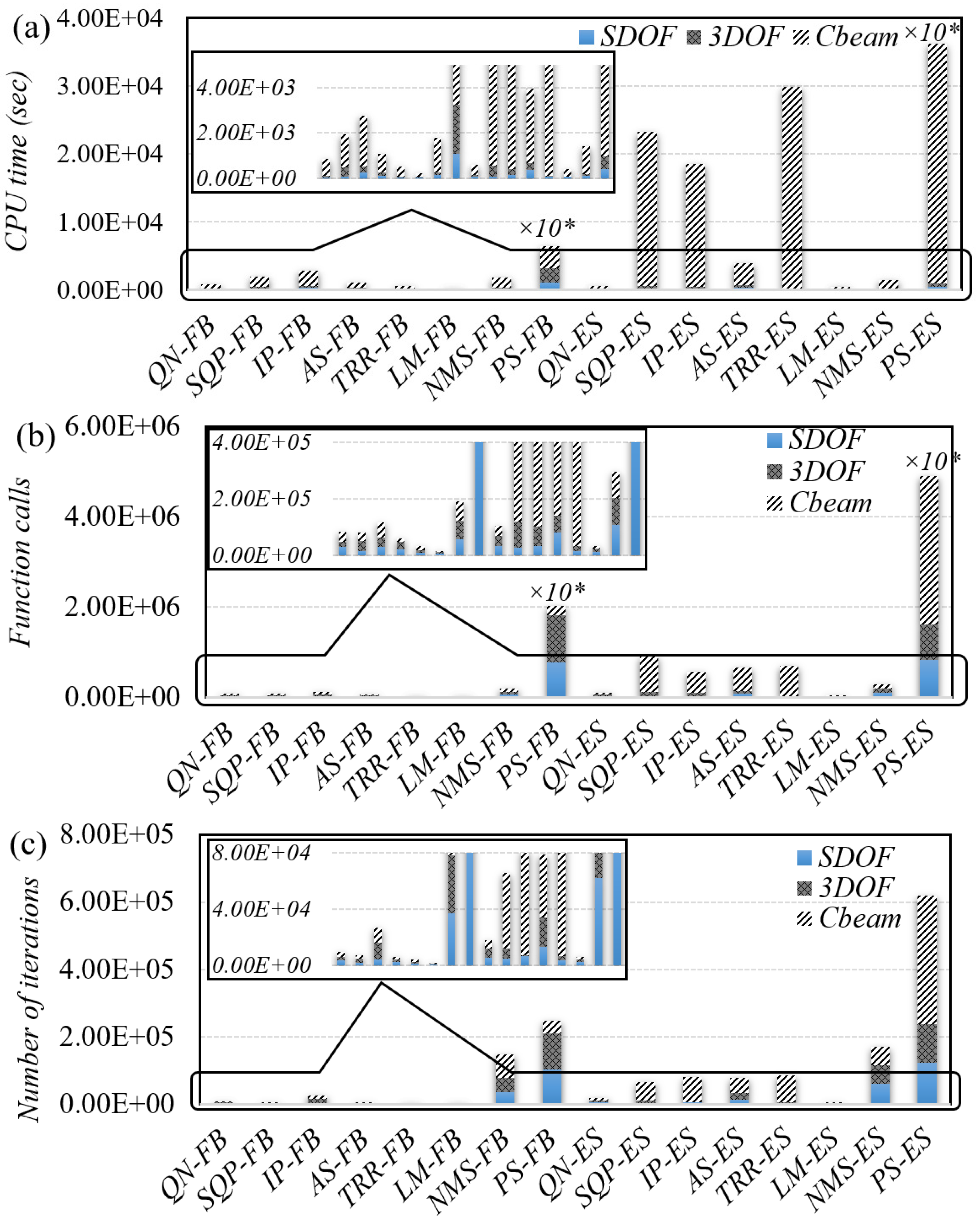
- CPU time
- Number of function evaluations (Equation (4))
- Number of iterations
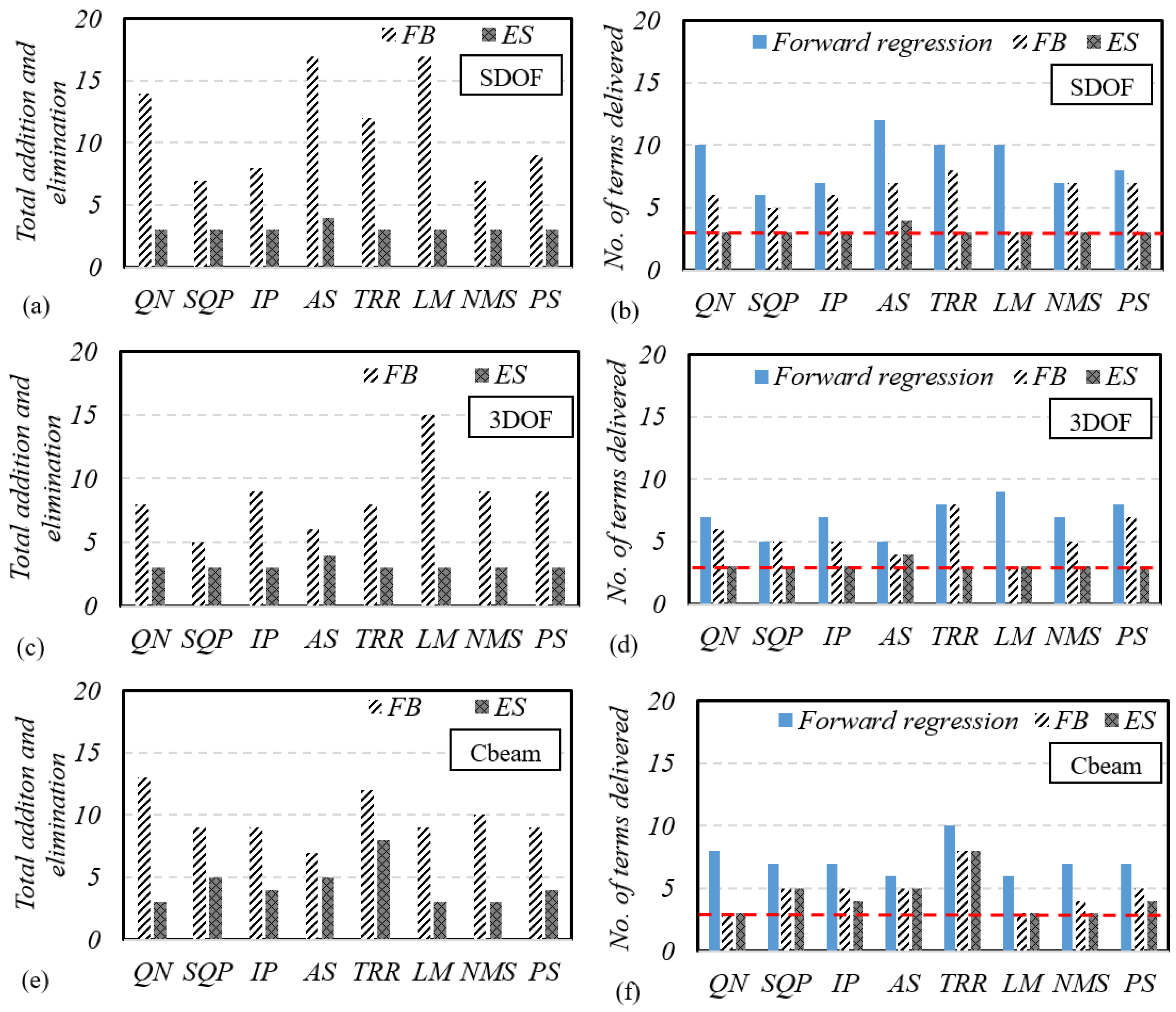
- Number of the function added or eliminated
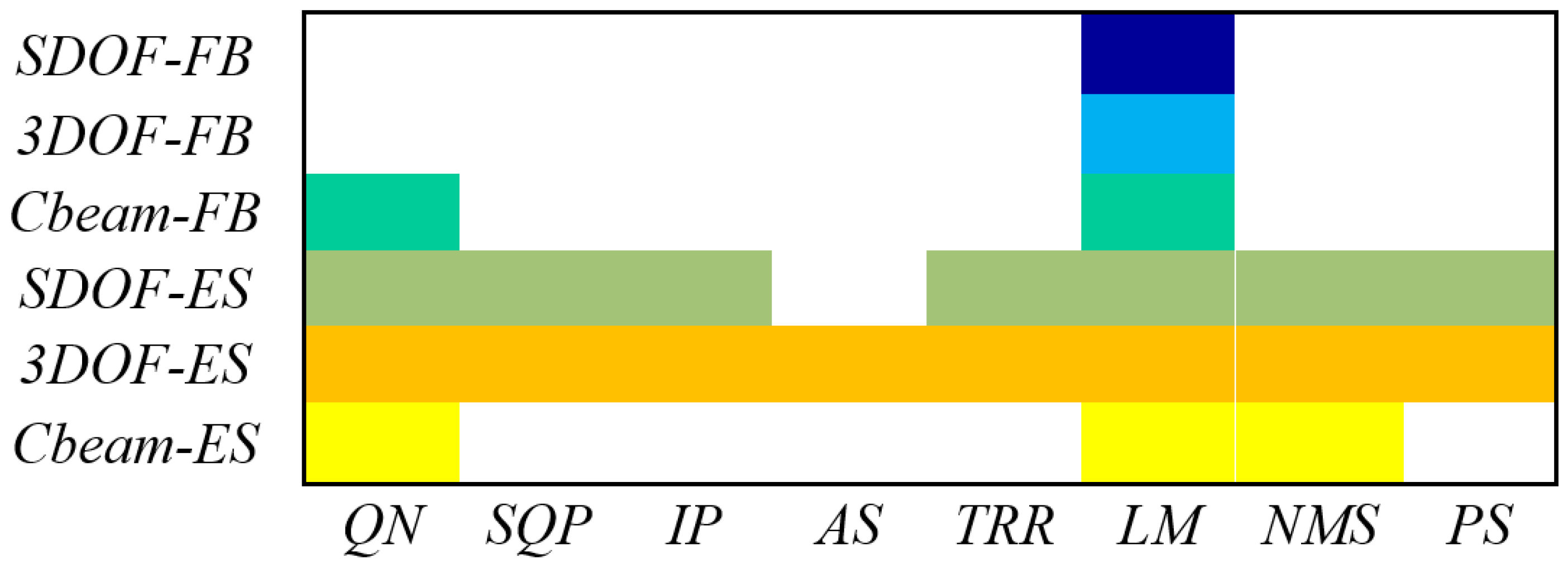
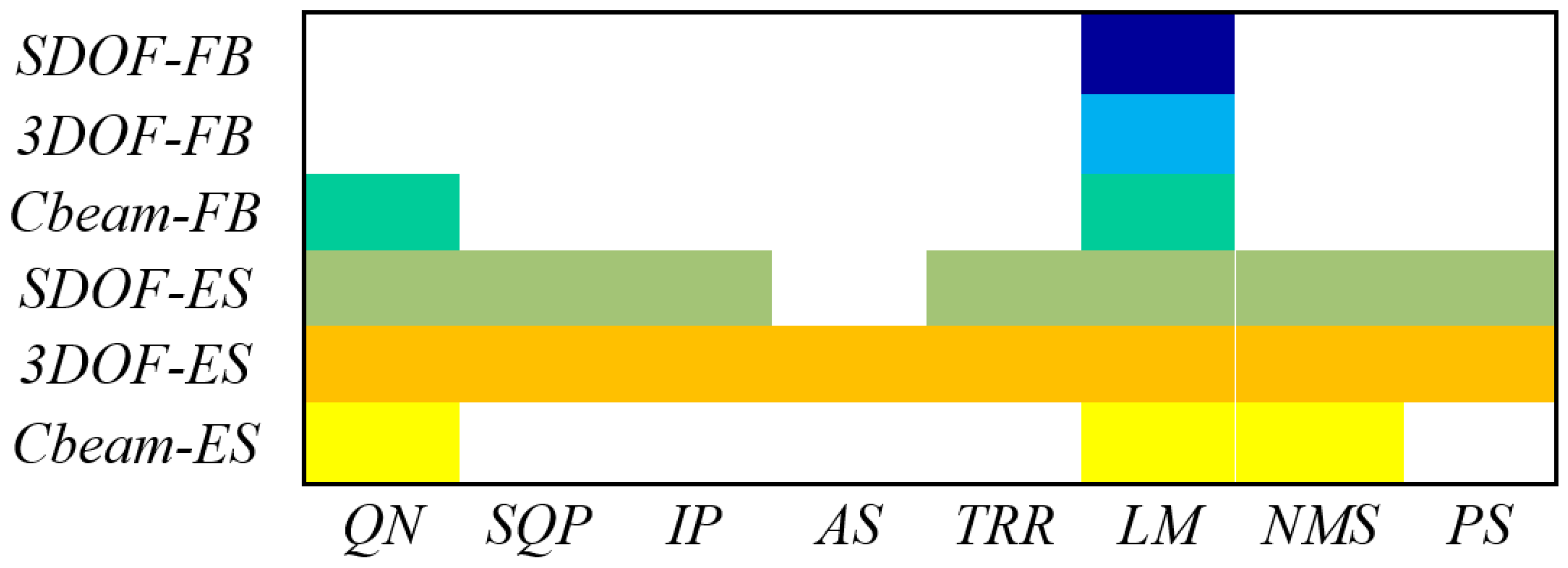
- Whether the functions selected are the true nonlinear function
- Complexity by number of terms overall
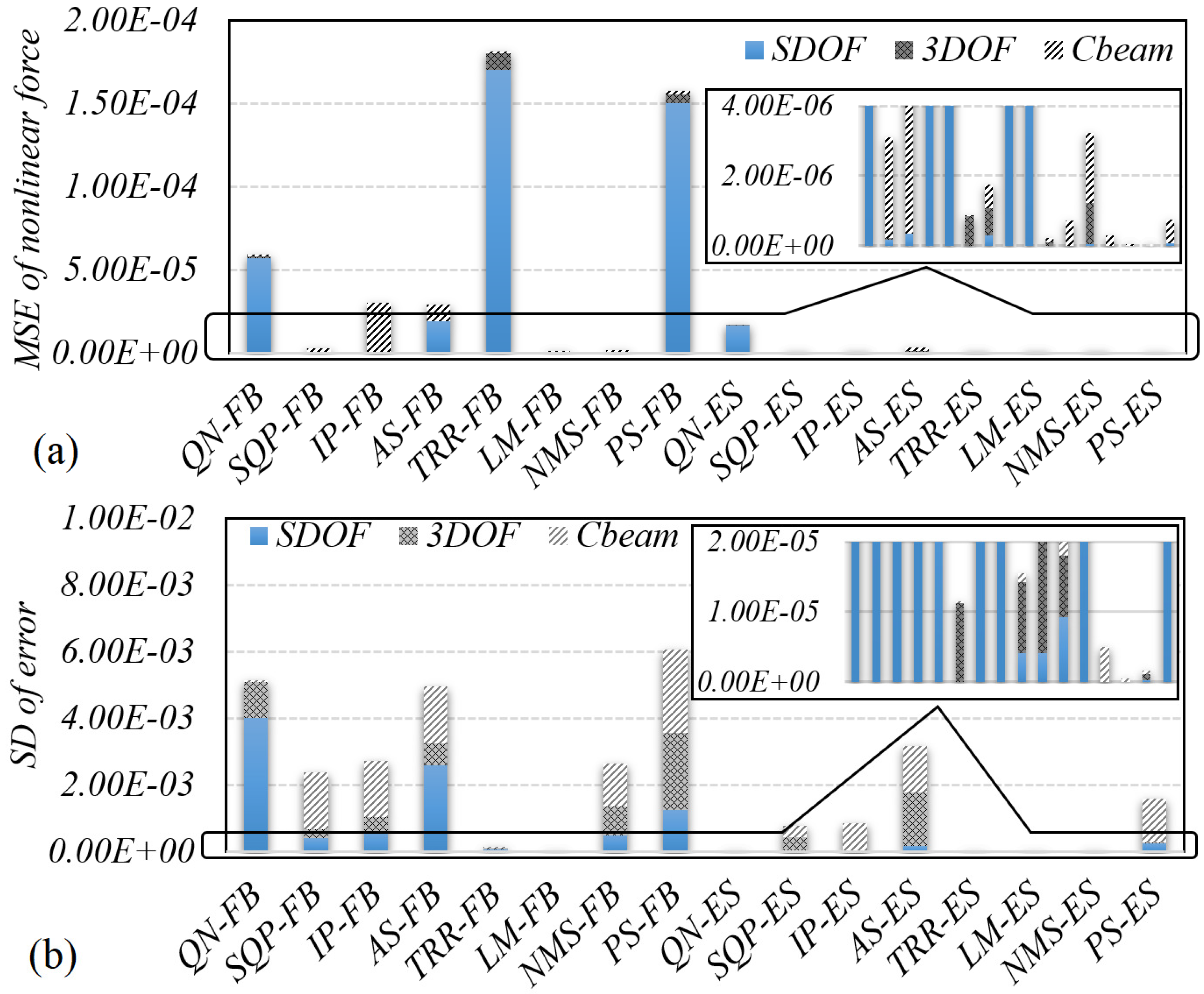
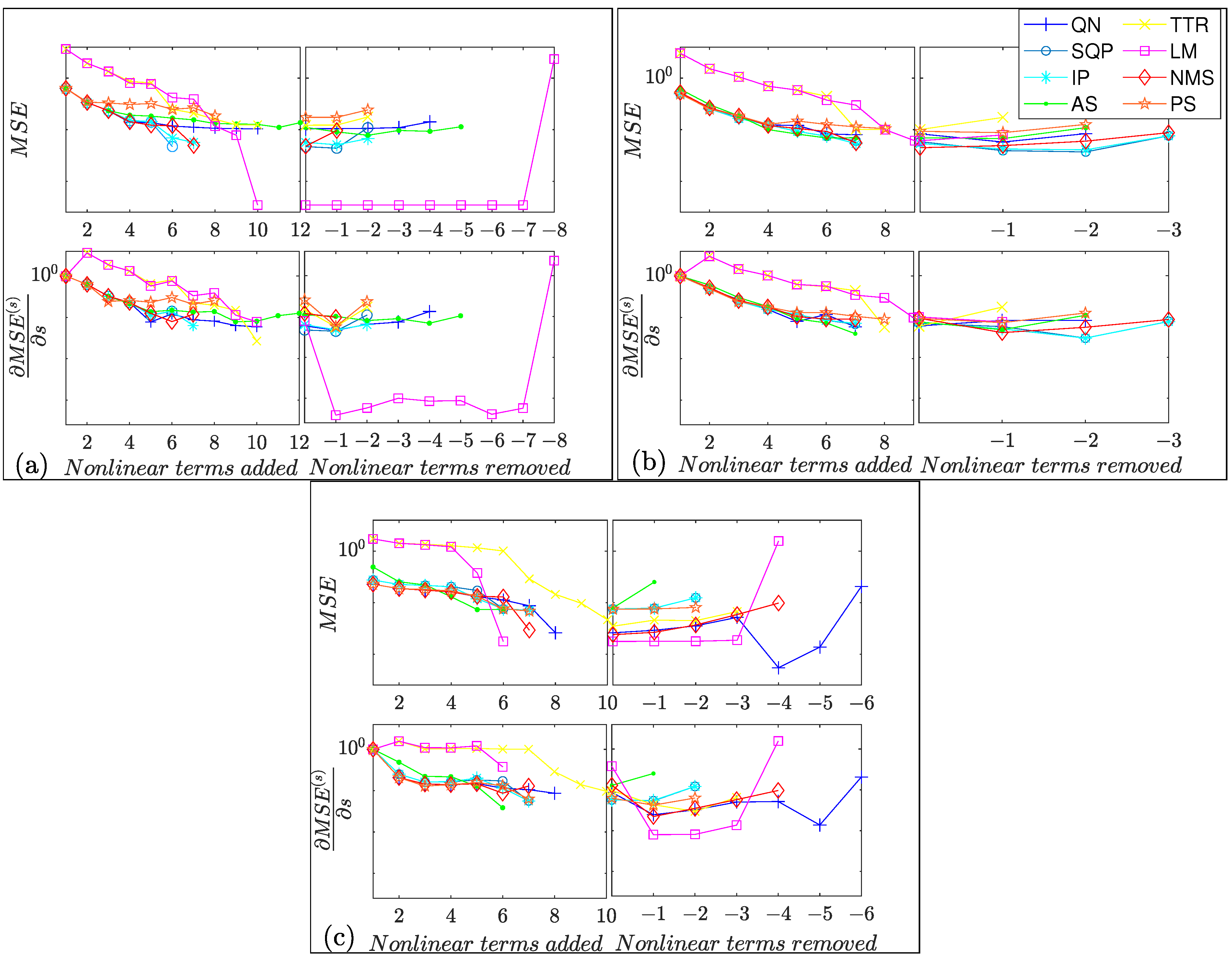
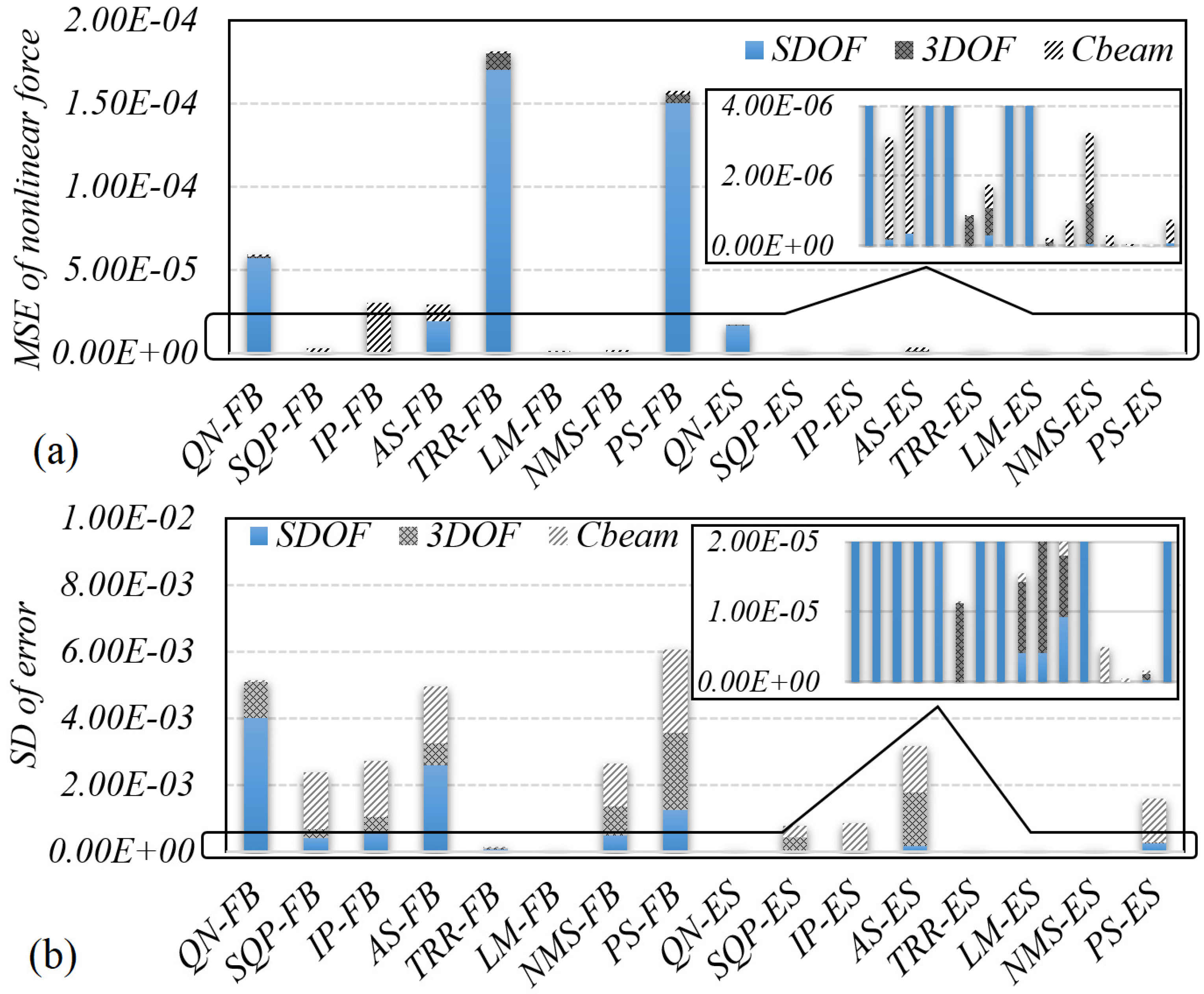
- How accurate are the prediction of the nonlinear model: error (MSE), dispersion of error (standard deviation of errors)
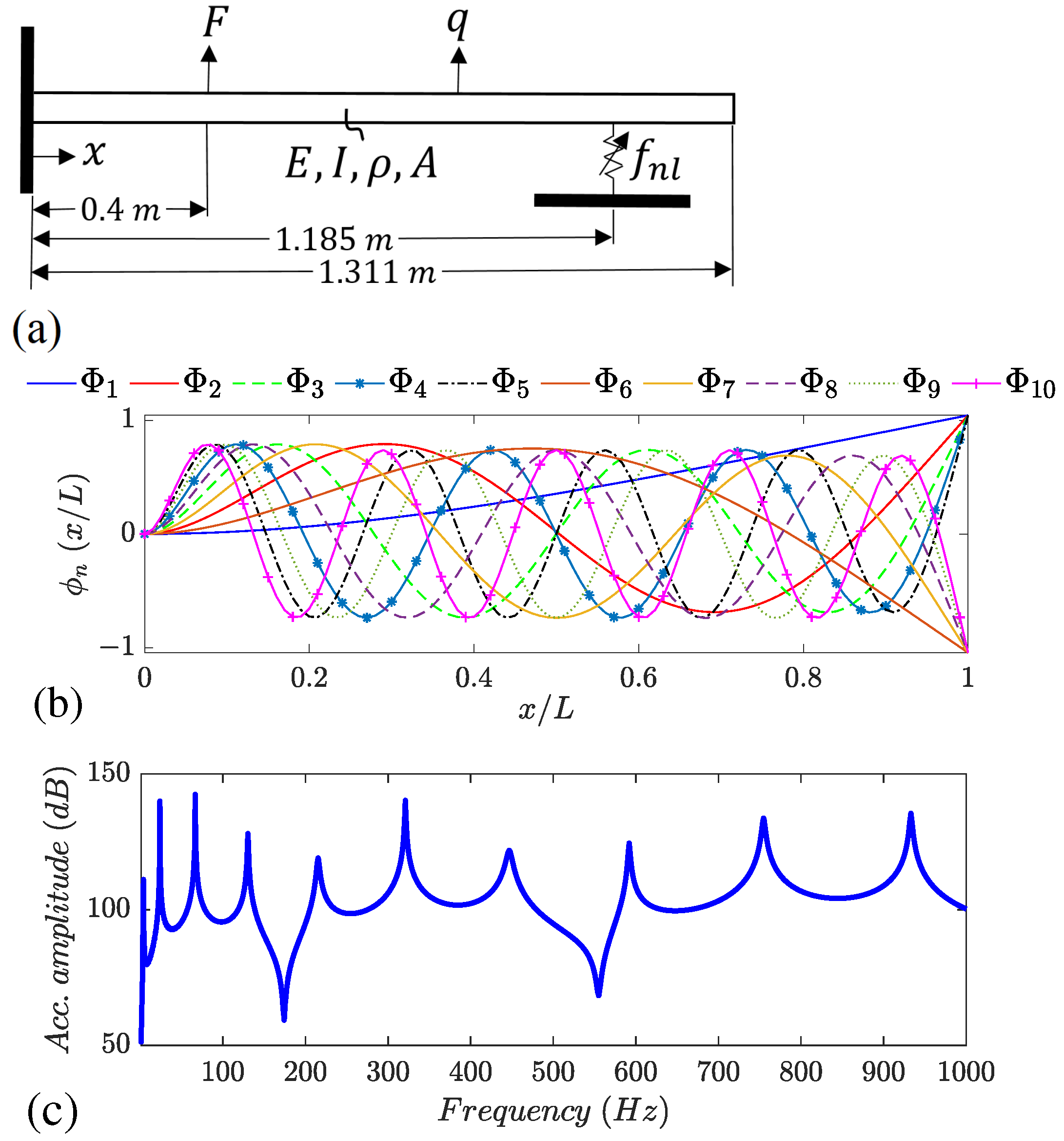
3. Benchmark Problems
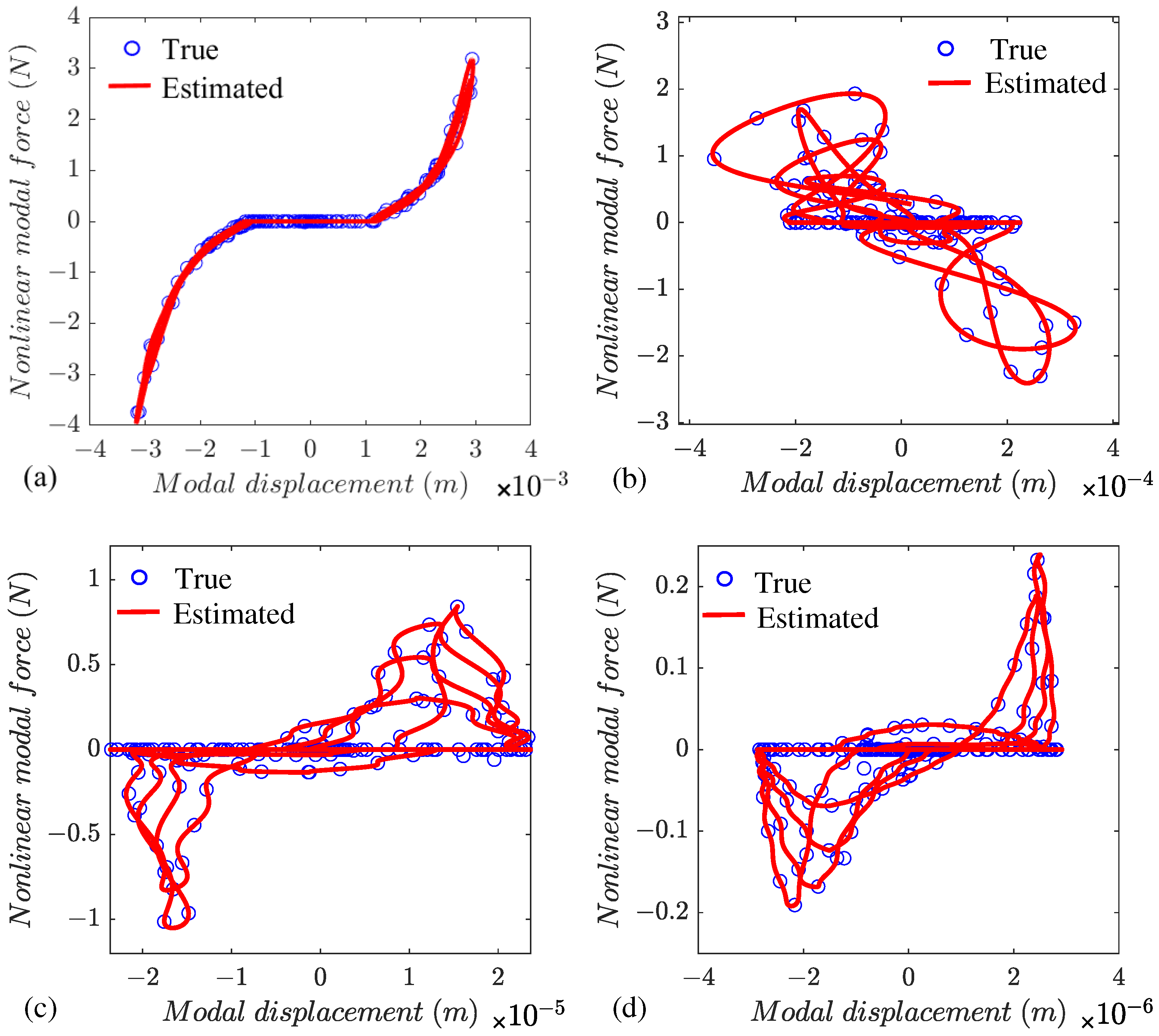
4. Results and Discussion
Performance of Hybrid Optimisation Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ondra, V.; Riethmueller, R.; Brake, M.R.W.; Schwingshackl, C.W.; Polunin, P.M.; Shaw, S.W. Comparison of Nonlinear System Identification Methods for Free Decay Measurements with Application to MEMS Devices. In Sensors and Instrumentation; Sit, E.W., Walber, C., Walter, P., Seidlitz, S., Eds.; Springer: Cham, Switzerland, 2017; Volume 5. [Google Scholar]
- Noël, J.; Marchesiello, S.; Kerschen, G. Subspace-based identification of a nonlinear spacecraft in the time and frequency domains. Mech. Syst. Signal Process. 2014, 43, 217–236. [Google Scholar] [CrossRef]
- Dossogne, T.; Masset, L.; Peeters, B.; Noël, J. Nonlinear dynamic model upgrading and updating using sine-sweep vibration data. Proc. R. Soc. A 2019, 475, 20190166. [Google Scholar] [CrossRef]
- Ewins, D. Modal Testing: Theory, Practice, and Application; Engineering Dynamics Series; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Dou, S.; Jensen, J. Optimization of hardening/softening behavior of plane frame structures using nonlinear normal modes. Comput. Struct. 2016, 164, 63–74. [Google Scholar] [CrossRef] [Green Version]
- Liao, H. An approach to construct the relationship between the nonlinear normal mode and forced response of nonlinear systems. J. Vib. Control 2016, 22, 3169–3181. [Google Scholar] [CrossRef]
- Sombroek, C.; Tiso, P.; Renson, L.; Kerschen, G. Numerical computation of nonlinear normal modes in a modal derivative subspace. Comput. Struct. 2018, 195, 34–46. [Google Scholar] [CrossRef] [Green Version]
- Prawina, J.; Rao, A.; Lakshmi, K. Nonlinear identification of structures using ambient vibration data. Comput. Struct. 2015, 154, 116–134. [Google Scholar] [CrossRef]
- Noël, J.; Kerschen, G. Nonlinear system identification in structural dynamics: 10 more years of progress. Mech. Syst. Signal Process. 2017, 83, 2–35. [Google Scholar] [CrossRef]
- Brunton, S.; Kutz, J. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Wright, J.; Cooper, J.; Desforges, M. Normal-mode force appropriation-theory and application. Mech. Syst. Signal Process. 1999, 13, 217–240. [Google Scholar] [CrossRef]
- Kerschen, J.; Golinval, J.; Worden, K. Theoretical and experimental identification of a non-linear beam. J. Sound Vib. 2001, 244, 597–613. [Google Scholar] [CrossRef] [Green Version]
- Marchesiello, S.; Garibaldi, L. A time domain approach for identifying nonlinear vibrating structures by subspace methods. Mech. Syst. Signal Process. 2008, 22, 81–101. [Google Scholar] [CrossRef]
- Billings, S. Nonlinear System Identification: NARMAX Methods in the Time, Frequency and Spatio-Temporal Domains; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Karaağaçlı, T.; Özgüven, H.N. Experimental Identification of Backbone Curves of Strongly Nonlinear Systems by Using Response-Controlled Stepped-Sine Testing (RCT). Vibration 2020, 3, 266–280. [Google Scholar] [CrossRef]
- Londoño, J.; Neild, S.; Cooper, J. Identification of backbone curves of nonlinear systems from resonance decay responses. J. Sound Vib. 2015, 348, 224–238. [Google Scholar] [CrossRef] [Green Version]
- Londoño, J.; Cooper, J.; Neild, S. Identification of systems containing nonlinear stiffnesses using backbone curves. Mech. Syst. Signal Process. 2017, 84, 116–135. [Google Scholar] [CrossRef] [Green Version]
- Moore, K. Characteristic nonlinear system identification: A data-driven approach for local nonlinear attachments. Mech. Syst. Signal Process. 2019, 131, 335–347. [Google Scholar] [CrossRef]
- Mangan, N.M.; Kutz, J.N.; Brunton, S.L.; Proctor, J.L. Model selection for dynamical systems via sparse regression and information criteria. Proc. R. Soc. A 2017, 473. [Google Scholar] [CrossRef] [Green Version]
- Paduart, J.; Lauwers, L.; Swevers, J.; Smolders, K.; Schoukens, J.; Pintelon, R. Identification of nonlinear systems using polynomial nonlinear state space models. Automatica 2010, 46, 647–657. [Google Scholar] [CrossRef]
- Balaji, N.N.; Lian, S.; Scheel, M.; Brake, M.R.W.; Tiso, P.; Noël, J.P.; Krack, M. Numerical Assessment of Polynomial Nonlinear State-Space and Nonlinear-Mode Models for Near-Resonant Vibrations. Vibration 2020, 3, 320–342. [Google Scholar] [CrossRef]
- Cooper, S.; Tiels, K.; Tituruse, B.; DiMaio, D. Polynomial nonlinear state space identification of an aero-engine structure. Comput. Struct. 2020, 238, 106299. [Google Scholar] [CrossRef]
- Worden, K.; Barthorpe, R.; Cross, E.; Dervilis, N.; Holmes, G.; Manson, G.; Rogers, T. On evolutionary system identification with applications to nonlinear benchmarks. Mech. Syst. Signal Process. 2018, 112, 194–232. [Google Scholar] [CrossRef]
- Abdessalem, A.B.; Dervilis, N.; Wagg, D.; Worden, K. Model selection and parameter estimation in structural dynamics using approximate Bayesian computation. Mech. Syst. Signal Process. 2018, 99, 306–325. [Google Scholar] [CrossRef]
- Taghipour, J.; Khodaparast, H.; Friswell, M.; Jalali, H. An Optimization-Based Framework for Nonlinear Model Selection and Identification. Vibration 2019, 2, 311–331. [Google Scholar] [CrossRef] [Green Version]
- Safari, S.; Londoño, J. Direct optimisation based model selection and parameter estimation using time-domain data for identifying localised nonlinearities. J. Sound Vib. 2021, 51, 116056. [Google Scholar] [CrossRef]
- Roberts, I.; Jones, D.; Lieven, N.; di Bernado, M.; Champneys, A. Analysis of piecewise linear aeroelastic systems using numerical continuation. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2002, 216, 747–763. [Google Scholar] [CrossRef] [Green Version]
- Baea, J.S.; Inmana, D.; Leeb, I. Effects of structural nonlinearity on subsonic aeroelastic characteristics of an aircraft wing with control surface. J. Fluids Struct. 2004, 19, 747–763. [Google Scholar] [CrossRef]
- Clough, R.; Penzien, J. Dynamics of Structures; Computers and Structures, Inc.: Berkeley, CA, USA, 2003. [Google Scholar]
- Peeters, P.; Auweraera, H.; Guillaumeb, P.; Leuridana, J. The PolyMAX frequency-domain method: A new standard for modal parameter estimation? Shock Vib. 2004, 11, 395–409. [Google Scholar] [CrossRef]
- Moore, K.; Kurt, M.; Eriten, M.; McFarland, M.; Bergman, L.; Vakakis, A. Direct detection of nonlinear modal interactions from time series measurements. Mech. Syst. Signal Process. 2019, 125, 311–329. [Google Scholar] [CrossRef]
- Moore, K.; Kurt, M.; Eriten, M.; McFarland, M.; Bergman, L.; Vakakis, A. Time-series-based nonlinear system identification of strongly nonlinear attachments. J. Sound Vib. 2019, 438, 13–32. [Google Scholar] [CrossRef]
- Safari, S.; Londoño, J. Nonlinear Function Selection and Parameter Estimation of Structures with Localised Nonlinearities, Part 1: Numerical Analysis. In Nonlinear Structures and Systems; Kerschen, G., Brake, M., Renson, L., Eds.; Springer: Cham, Switzerland, 2019; Volume 1. [Google Scholar]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Schittkowski, K. Numerical Data Fitting in Dynamical Systems: A Practical Introduction with Applications and Software, 1st ed.; Springer Science and Business Media: Dordrecht, The Netherlands, 2013; Volume 77. [Google Scholar]
- Isermann, R.; Munchhof, M. Identification of Dynamic Systems, An Introduction with Applications; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Das, S.; Mondal, S.; Guchhait, S. Particle swarm optimization–based characterization technique of nonproportional viscous damping parameter of a cantilever beam. J. Vib. Control 2021, 10775463211010526. [Google Scholar] [CrossRef]
- Martí, R.; Corberán, Á.; Peiró, J. Scatter Search. In Handbook of Heuristics; Martí, R., Panos, P., Resende, M.G., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 1–24. [Google Scholar] [CrossRef]
- Zhigljavsky, A.; Zilinskas, A. Stochastic Global Optimization, 1st ed.; Springer Optimization and Its Applications; Springer: Berlin/Heidelberg, Germany, 2008; Volume 9. [Google Scholar]
- Piotrowski, A.; Napiorkowski, J.; Piotrowska, A. Population size in Particle Swarm Optimization. Swarm Evol. Comput. 2020, 58, 100718. [Google Scholar] [CrossRef]
- Villaverde, A.F.; Fröhlich, F.; Weindl, D.; Hasenauer, J.; Banga, J.R. Benchmarking optimization methods for parameter estimation in large kinetic models. Bioinformatics 2019, 35, 830–838. [Google Scholar] [CrossRef] [PubMed]
- Kurt, M.; Chen, H.; Lee, T.; McFarland, D.; Bergman, L.; Vakakis, A. Nonlinear system identification of the dynamics of a vibro-impact beam: Numerical results. Arch. Appl. Mech. 2012, 82, 1461–1479. [Google Scholar] [CrossRef] [Green Version]
- Herrera, C.A.; McFarland, D.; Bergma, L.; Vakakis, A. Methodology for nonlinear quantification of a flexible beam with a local, strong nonlinearity. J. Sound Vib. 2017, 388, 298–314. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Global Methods | Local Methods |
|---|---|
| Nelder–Mead Simplex (NMS) | Quasi-Newton (QN) |
| Particle Swarm (PS) | Sequential Quadratic Programming (SQP) |
| Particle Swarm (PS) + local method | Active-Set (AS) |
| Multi-start (MS) + local method | Interior Point (IP) |
| Trust-Region-Reflective (TRR) | |
| Levenberg-marquardt (LM) |
| No. | Nonlinear Term | No. | Nonlinear Term |
|---|---|---|---|
| 1 | 7 | ||
| 2 | 8 | ||
| 3 | 9 | ||
| 4 | 10 | ||
| 5 | 11 | ||
| 6 | 12 | ||
| Criteria | SDOF-FB | SDOF-ES | ||
|---|---|---|---|---|
| MS-LM | PS-LM | MS-LM | PS-LM | |
| CPU time (sec) | 6652 | 5168 | 2027 | 5248 |
| MSE | ||||
| Success | Yes | No | Yes | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Safari, S.; Monsalve, J.L. Benchmarking Optimisation Methods for Model Selection and Parameter Estimation of Nonlinear Systems. Vibration 2021, 4, 648-665. https://doi.org/10.3390/vibration4030036
Safari S, Monsalve JL. Benchmarking Optimisation Methods for Model Selection and Parameter Estimation of Nonlinear Systems. Vibration. 2021; 4(3):648-665. https://doi.org/10.3390/vibration4030036
Chicago/Turabian StyleSafari, Sina, and Julián Londoño Monsalve. 2021. "Benchmarking Optimisation Methods for Model Selection and Parameter Estimation of Nonlinear Systems" Vibration 4, no. 3: 648-665. https://doi.org/10.3390/vibration4030036
APA StyleSafari, S., & Monsalve, J. L. (2021). Benchmarking Optimisation Methods for Model Selection and Parameter Estimation of Nonlinear Systems. Vibration, 4(3), 648-665. https://doi.org/10.3390/vibration4030036