Instantaneous Pre-Fire Biomass and Fuel Load Measurements from Multi-Spectral UAS Mapping in Southern African Savannas

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
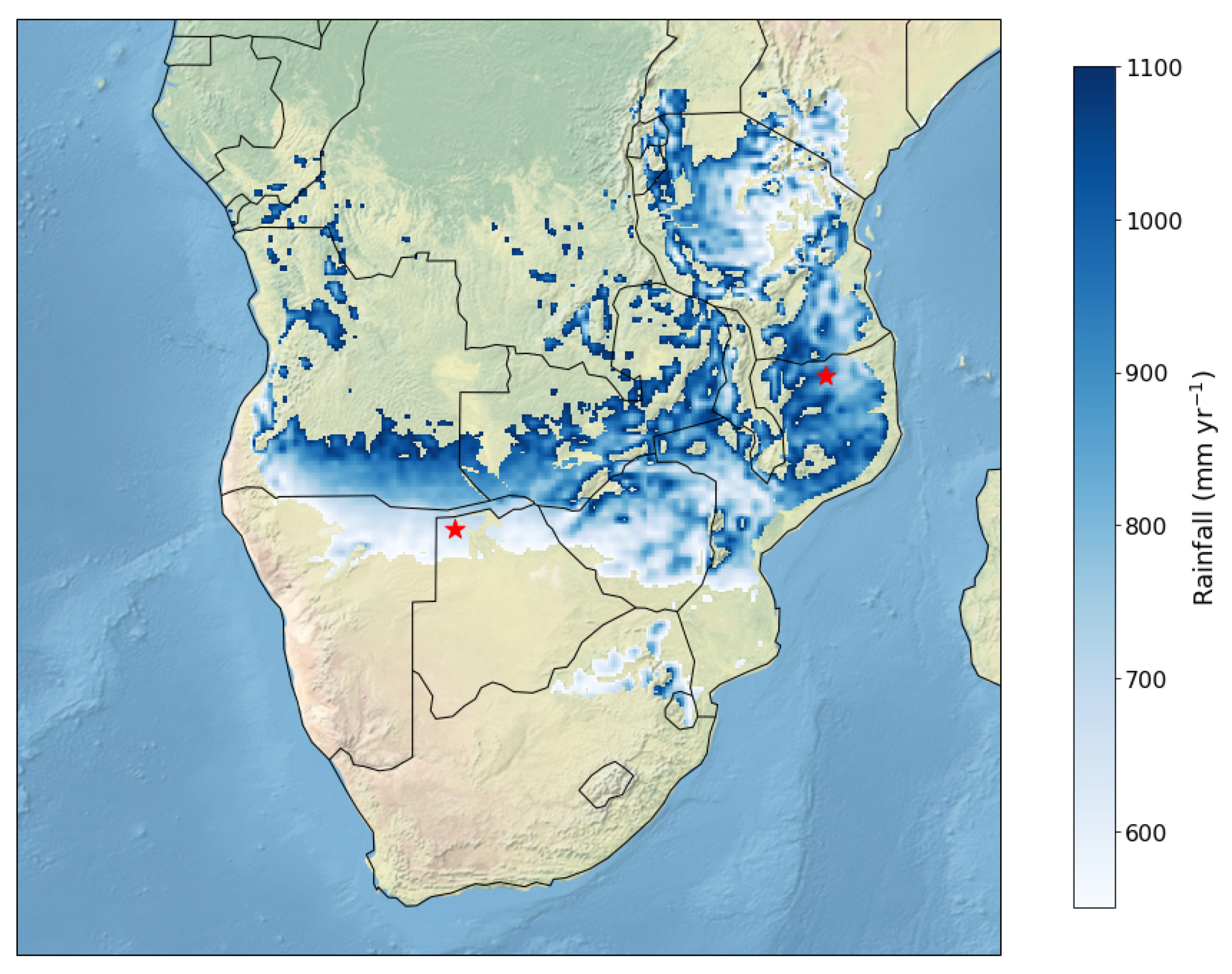
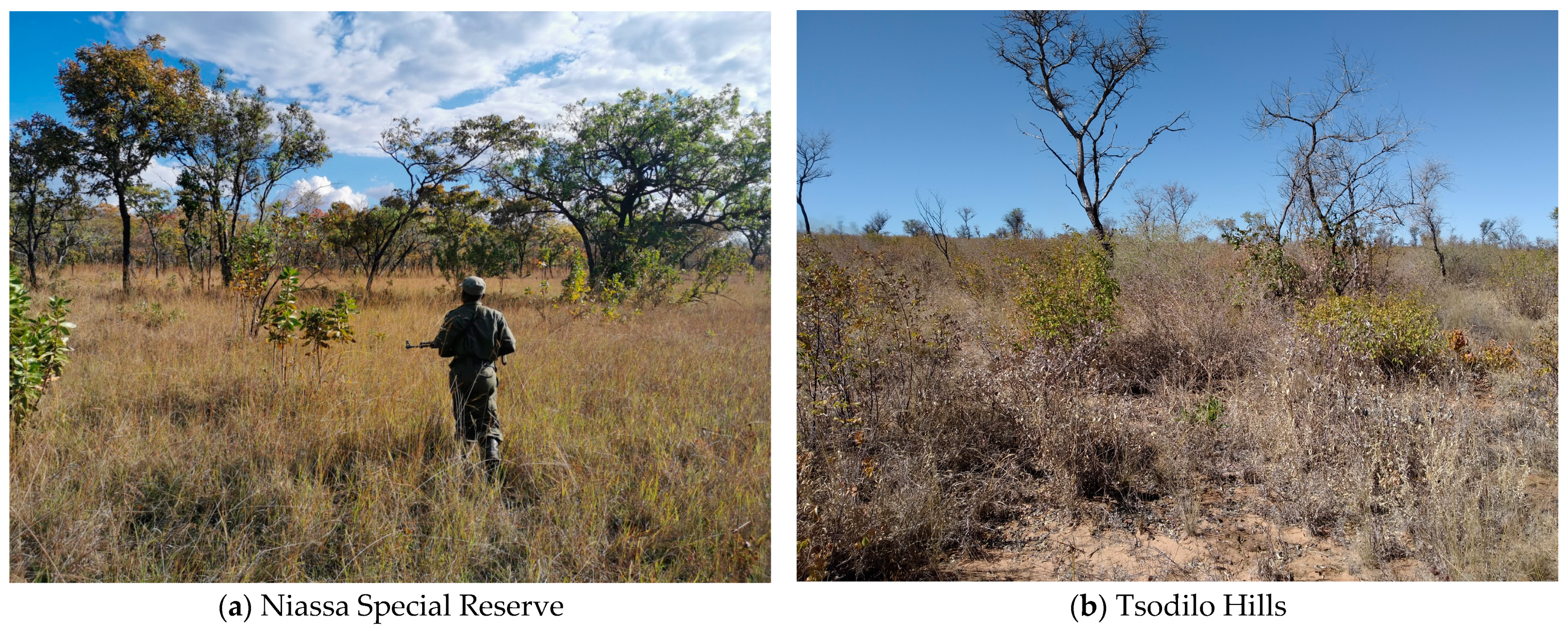
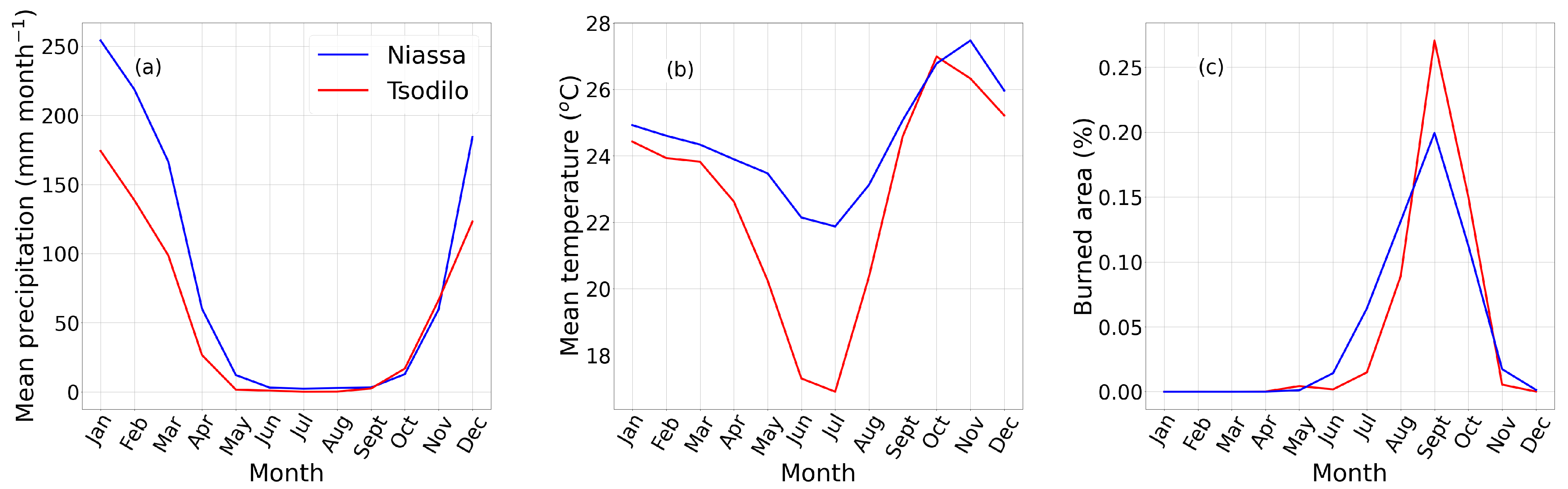
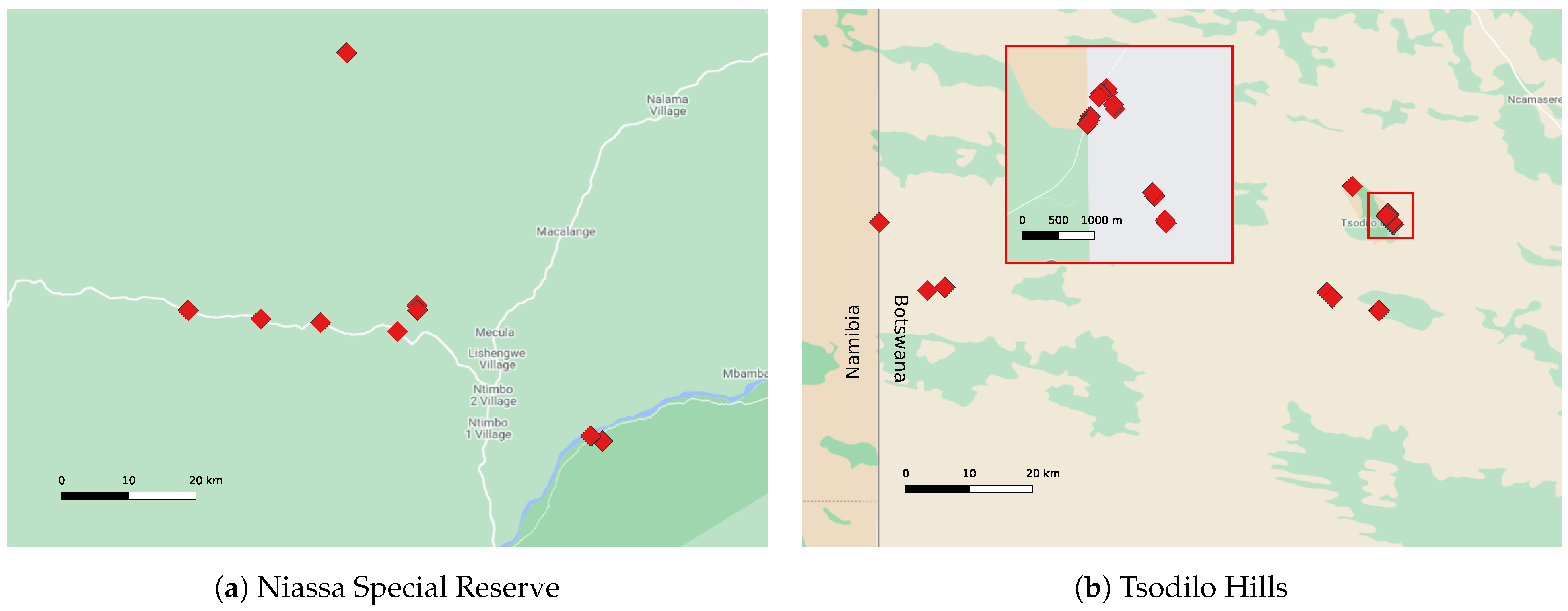
2.1. Study Regions
2.1.1. Tsodilo Hills
2.1.2. Niassa Special Reserve
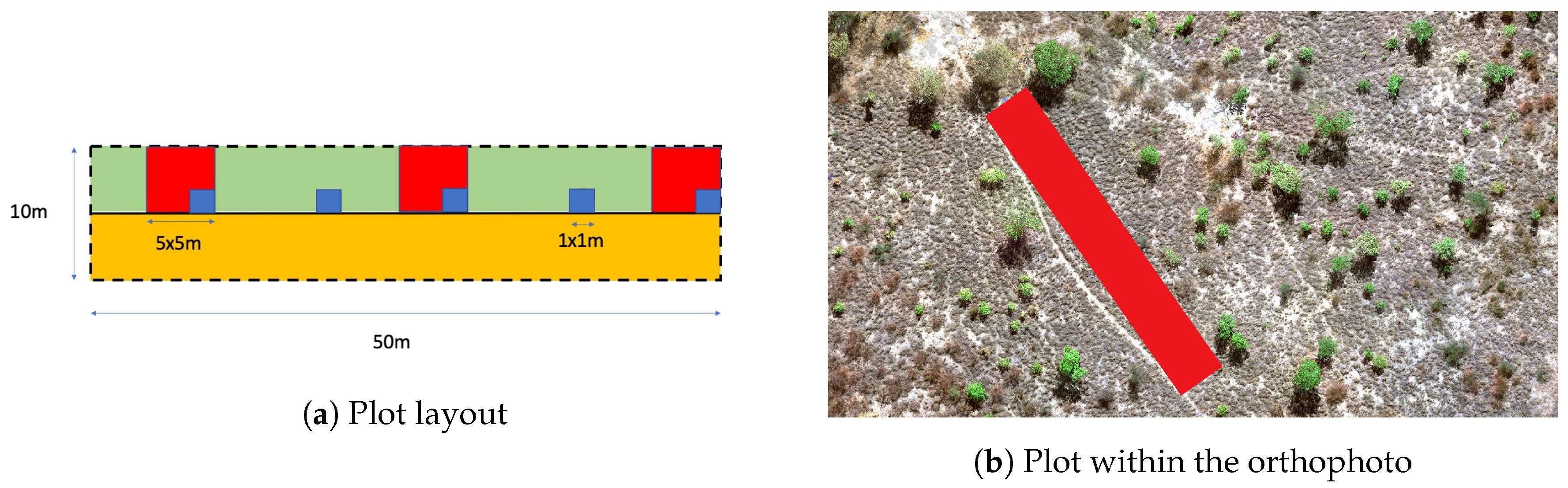
2.2. Ground Measurements
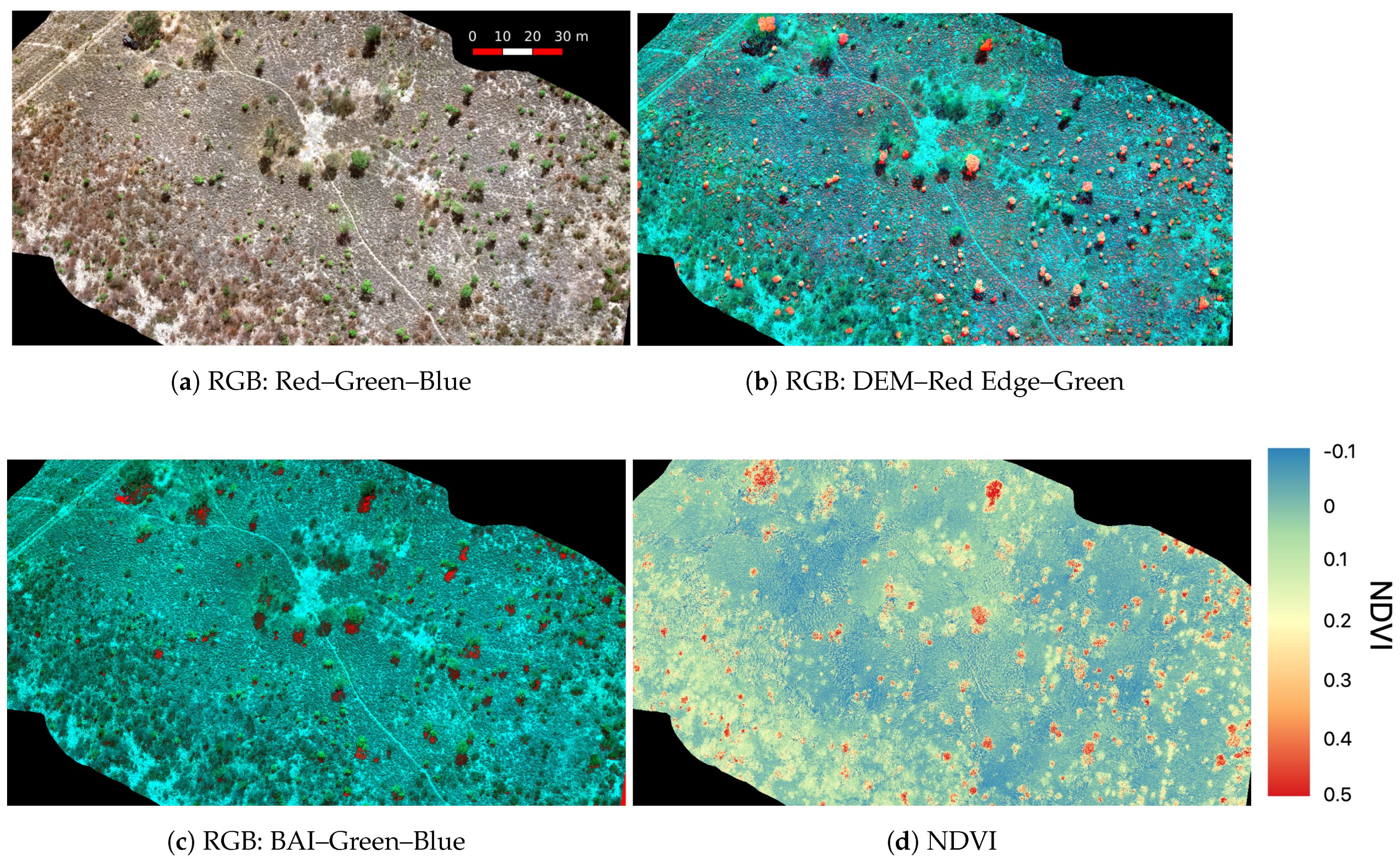
2.3. UAS Maps
2.3.1. Map Creation
2.3.2. Map Processing
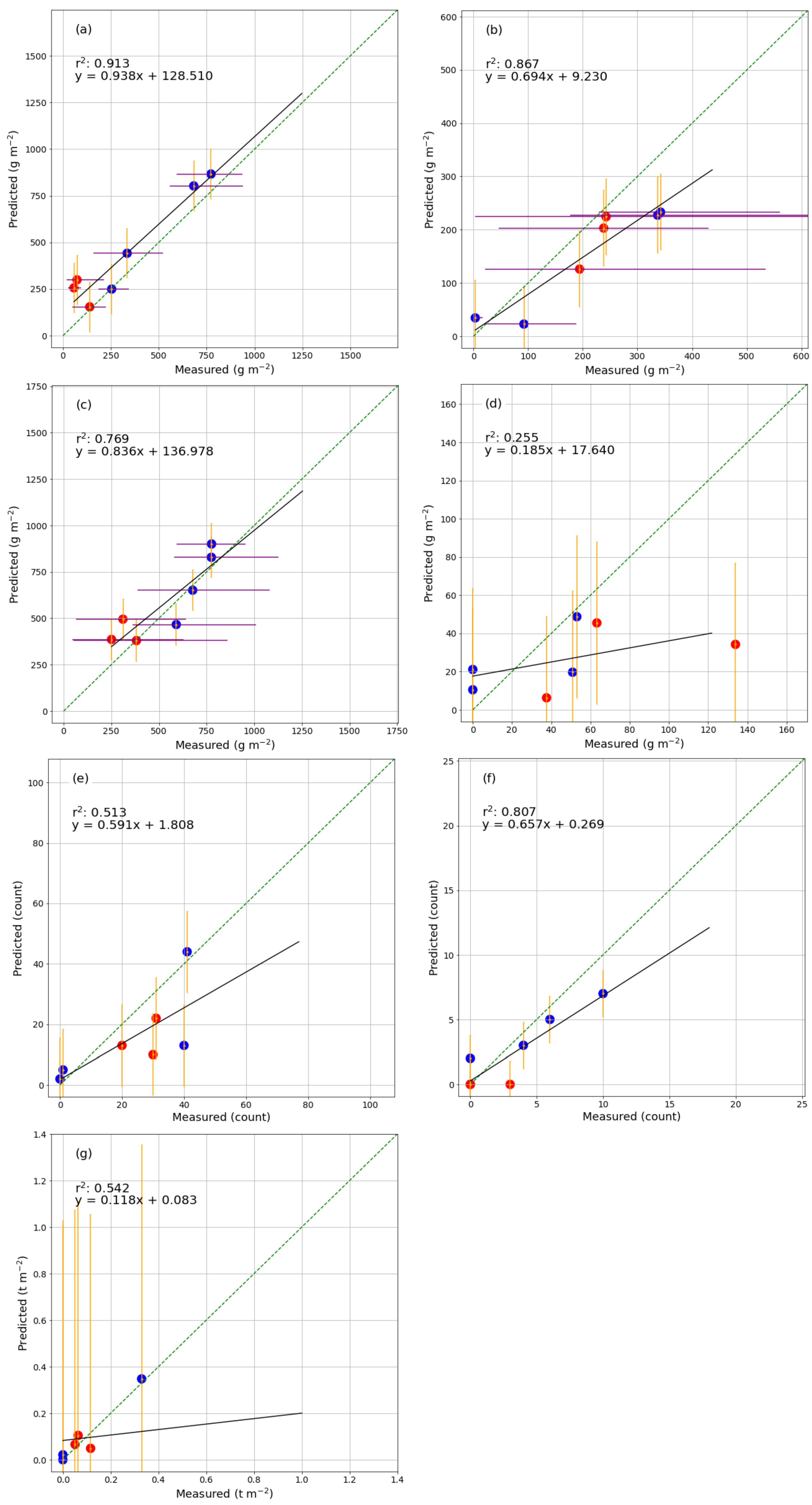
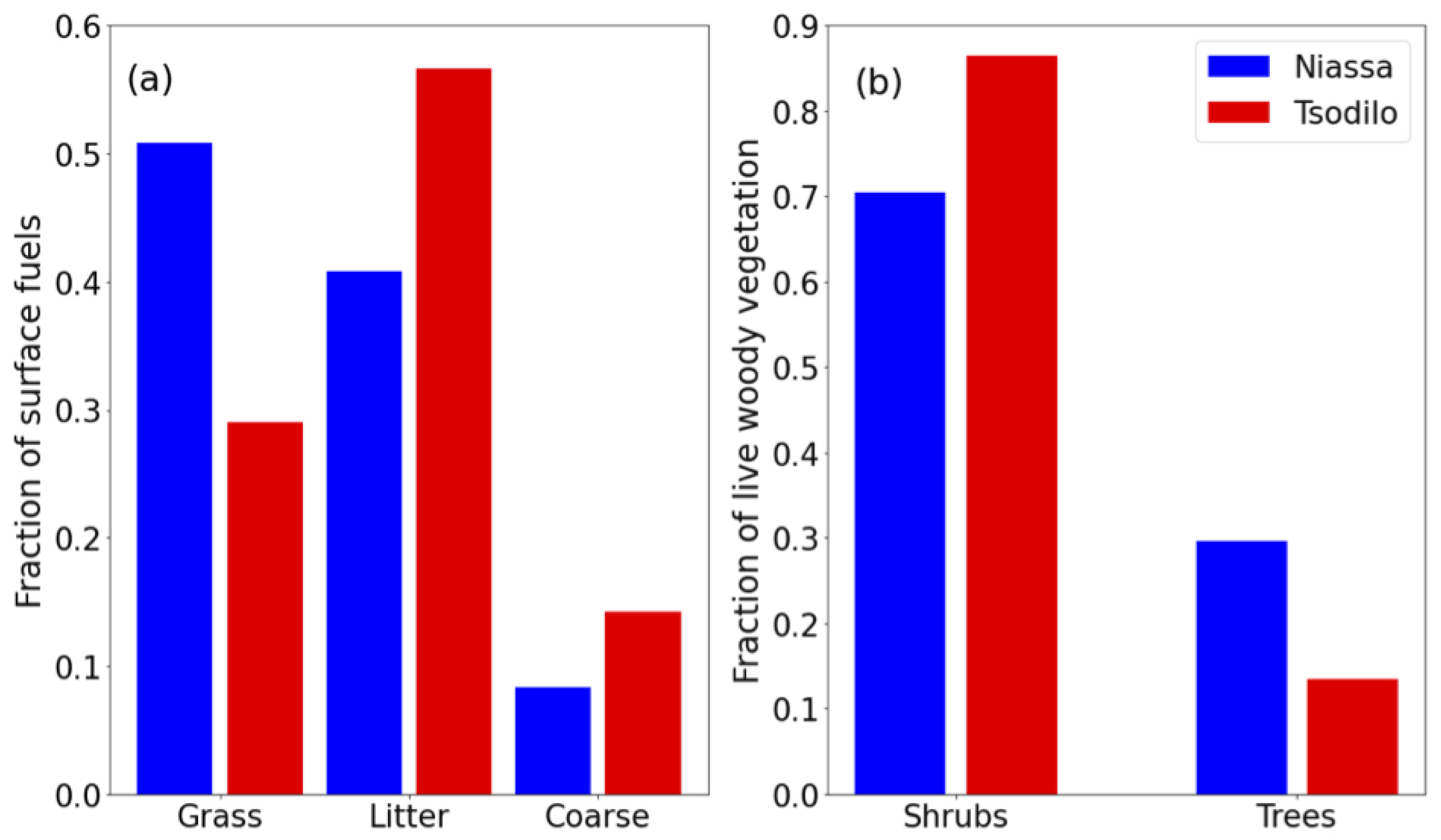
3. Results
4. Discussion
4.1. Model Output
4.2. Upscaling
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGB | Above-Ground Biomass |
| aPAR | Absorbed Photosynthetically Active Radiation |
| BA | Burned Area |
| BAI | Burned-Area Index |
| CC | Combustion Completeness |
| DEM | Digital Elevation Model |
| DLS | Downwelling Light Sensor |
| DN | Digital Number |
| EDS | Early Dry Season |
| FL | Fuel Load |
| FTC | Fractional Tree Cover |
| GCP | Ground Control Point |
| GPS | Global Positioning System |
| LDS | Late Dry Season |
| LiDAR | Light Detection and Ranging |
| LOOCV | Leave-One-Out Cross-Validation |
| LUE | Light Use Efficiency |
| NCAR | National Center for Atmospheric Research |
| NDVI | Normalized Difference Vegetation Index |
| NPP | Net Primary Production |
| OBIA | Object-Based Image Analysis |
| R-CNN | Regional Convolutional Neural Network |
| REN | Niassa Special Reserve (Reserva Especial do Niassa) |
| TSF | Time Since Fire |
| UAS | Unmanned Aircraft System |
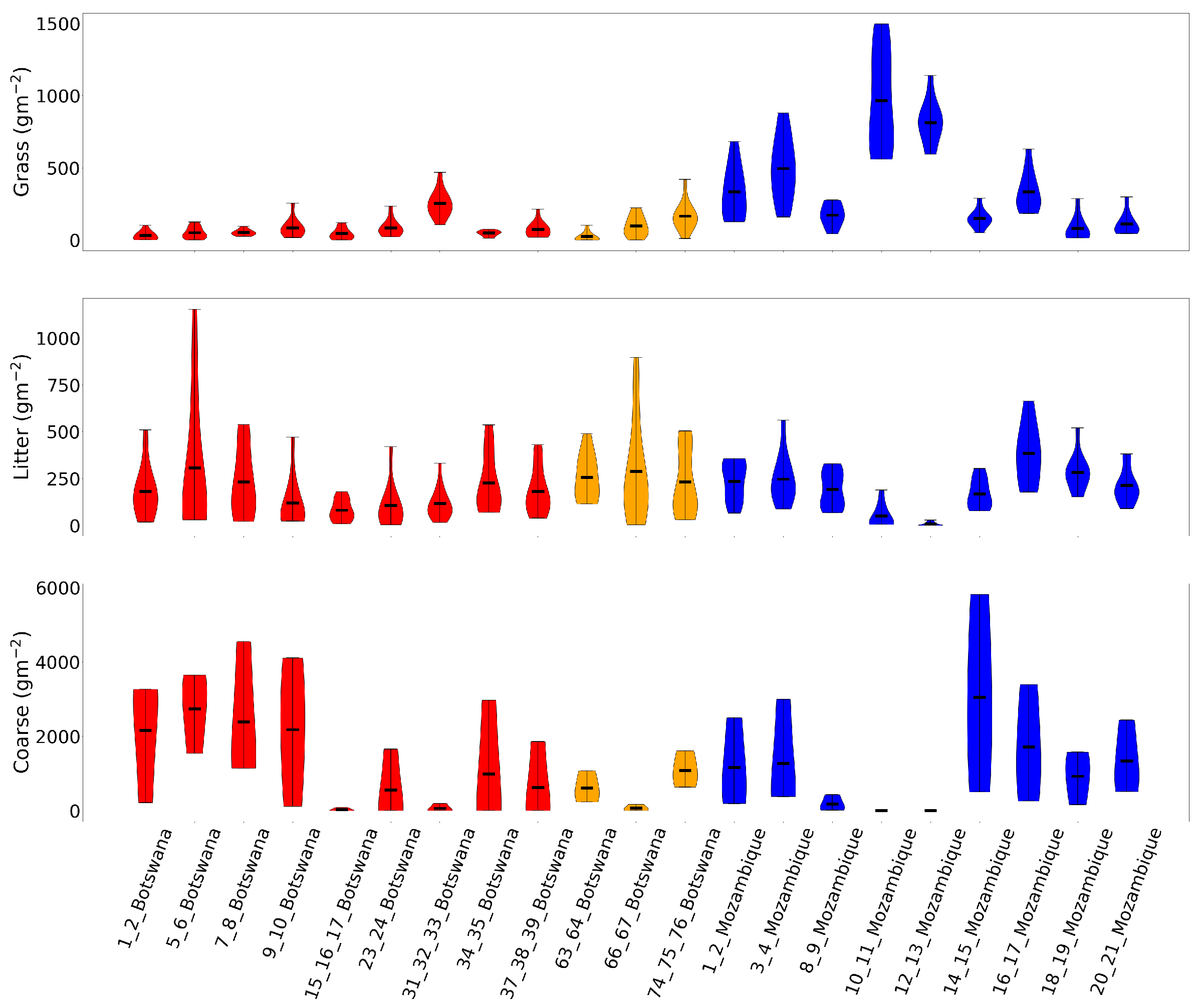
Appendix A. AGB Distribution per Site

Appendix B. MicaSense RedEdge Bands

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Name | MicaSense | LANDSAT OLI | Sentinel-2 MSI |
|---|---|---|---|
| Blue | 465–485 | 452–512 | 458–523 |
| Green | 550–570 | 533–590 | 543–578 |
| Red | 663–673 | 636–673 | 650–680 |
| Red edge | 712–722 | N/A | 733–748 |
| NIR | 820–860 | 851–879 | 855–875 |
Appendix C. Model Training
| Fuel Class | R | RMSE | Condition Number |
|---|---|---|---|
| Grass | 0.88 | 309 | 8.2 × 10 |
| Litter | 0.91 | 208 | 8.3 × 10 |
| Total fine | 0.94 | 433 | 8.3 × 10 |
| Coarse | 0.70 | 55 | 8.3 × 10 |
| Shrubs | 0.85 | 34 | 8.1 × 10 |
| Trees | 0.83 | 6.7 | 7.9 × 10 |
| Heavy | 0.66 | 0.34 | 8.3 × 10 |

References
- Myhre, G.; Shindell, D.; Bréon, F.M.; Collins, W.; Fuglestvedt, J.; Huang, J.; Koch, D.; Lamarque, J.F.; Lee, D.; Mendoza, B.; et al. Anthropogenic and natural radiative forcing. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.K., Tignor, M., Allen, S.K., Doschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P.M., Eds.; Cambridge University Press: Cambridge, UK, 2013; pp. 659–740. [Google Scholar] [CrossRef]
- Van der Werf, G.R.; Randerson, J.T.; Giglio, L.; Van Leeuwen, T.T.; Chen, Y.; Rogers, B.M.; Mu, M.; Van Marle, M.J.; Morton, D.C.; Collatz, G.J.; et al. Global fire emissions estimates during 1997–2016. Earth Syst. Sci. Data 2017, 9, 697–720. [Google Scholar] [CrossRef]
- Scholes, R.; Archer, S. Tree-Grass Interactions in Savannas. Annu. Rev. Ecol. Syst. 1997, 28, 517–544. [Google Scholar] [CrossRef]
- Beerling, D.J.; Osborne, C.P. The origin of the savanna biome. Glob. Chang. Biol. 2006, 12, 2023–2031. [Google Scholar] [CrossRef]
- Archibald, S.; Roy, D.P.; van Wilgen, B.W.; Scholes, R.J. What limits fire? An examination of drivers of burnt area in Southern Africa. Glob. Chang. Biol. 2009, 15, 613–630. [Google Scholar] [CrossRef]
- van Wilgen, B.W.; Everson, C.S.; Trollope, W.S.W. Fire Management in Southern Africa: Some Examples of Current Objectives, Practices, and Problems. In Fire in the Tropical Biota. Ecological Studies (Analysis and Synthesis), 84th ed.; Goldammer, J.G., Ed.; Springer: Berlin/Heidelberg, Germany, 1990; Chapter 11; pp. 179–215. [Google Scholar] [CrossRef]
- Govender, N.; Trollope, W.S.; Van Wilgen, B.W. The effect of fire season, fire frequency, rainfall and management on fire intensity in savanna vegetation in South Africa. J. Appl. Ecol. 2006, 43, 748–758. [Google Scholar] [CrossRef]
- Seiler, W.; Crutzen, P. Estimates of Gross and Net Fluxes of Carbon Between. Clim. Chang. 1980, 2, 207–247. [Google Scholar] [CrossRef]
- Roteta, E.; Bastarrika, A.; Padilla, M.; Storm, T.; Chuvieco, E. Development of a Sentinel-2 burned area algorithm: Generation of a small fire database for sub-Saharan Africa. Remote Sens. Environ. 2019, 222, 1–17. [Google Scholar] [CrossRef]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; San Miguel, J.; Tanasse, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical background and current developments for mapping burned area from satellite Earth observation. Remote. Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and Sentinel-2 burned area mapping—A combined sensor multi-temporal change detection approach. Remote. Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Andreae, M.O. Emission of trace gases and aerosols from biomass burning-An updated assessment. Atmos. Chem. Phys. 2019, 19, 8523–8546. [Google Scholar] [CrossRef]
- Wiedinmyer, C.; Akagi, S.K.; Yokelson, R.J.; Emmons, L.K.; Al-Saadi, J.A.; Orlando, J.J.; Soja, A.J. The Fire INventory from NCAR (FINN): A high resolution global model to estimate the emissions from open burning. Geosci. Model Dev. 2011, 4, 625–641. [Google Scholar] [CrossRef]
- Russell-Smith, J.; Murphy, B.P.; Meyer, M.; Cook, G.D.; Maier, S.; Edwards, A.C.; Schatz, J.; Brocklehurst, P. Improving estimates of savanna burning emissions for greenhouse accounting in northern Australia: Limitations, challenges, applications. Int. J. Wildland Fire 2009, 18, 1–18. [Google Scholar] [CrossRef]
- van Wees, D.; van der Werf, G.R. Modelling biomass burning emissions and the effect of spatial resolution: A case study for Africa based on the Global Fire Emissions Database (GFED). Geosci. Model Dev. 2019, 12, 4681–4703. [Google Scholar] [CrossRef]
- Lucas, R.M.; Cronin, N.; Lee, A.; Moghaddam, M.; Witte, C.; Tickle, P. Empirical relationships between AIRSAR backscatter and LiDAR-derived forest biomass, Queensland, Australia. Remote Sens. Environ. 2006, 100, 407–425. [Google Scholar] [CrossRef]
- de Souza Pereira, F.R.; Kampel, M.; Soares, M.L.G.; Estrada, G.C.D.; Bentz, C.; Vincent, G. Reducing uncertainty in mapping of mangrove aboveground biomass using airborne discrete return lidar data. Remote Sens. 2018, 10, 637. [Google Scholar] [CrossRef]
- Mundava, C.; Helmholz, P.; Schut, A.G.T.; Corner, R.; McAtee, B.; Lamb, D.W. Evaluation of vegetation indices for rangeland biomass estimation in the Kimberley area of Western Australia. Isprs Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2014, II-7, 47–53. [Google Scholar] [CrossRef]
- Galeana Pizaña, J.M.; Núñez Hernández, J.M.; Corona Romero, N. Remote Sensing-Based Biomass Estimation. In Environmental Applications of Remote Sensing; Marghany, M., Ed.; IntechOpen: London, UK, 2016; pp. 3–40. [Google Scholar] [CrossRef]
- Lu, D. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote. Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Hély, C.; Caylor, K.K.; Dowty, P.; Alleaume, S.; Swap, R.J.; Shugart, H.H.; Justice, C.O. A Temporally Explicit Production Efficiency Model for Fuel Load Allocation in Southern Africa. Ecosystems 2007, 10, 1116–1132. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Anderson, K.; Boschetti, F.; Brazier, R.E.; Graham, H.A.; Myers-Smith, I.H.; Astor, T.; Boer, M.M.; Calvo, L.; Clark, P.E.; et al. Drone-derived canopy height predicts biomass across non-forest ecosystems globally. bioRxiv 2020. Unpublished work. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 999–2049. [Google Scholar] [CrossRef]
- Olson, D.M.; Dinerstein, E. The Global 200: Priority Ecoregions for Global Conservation. Ann. Mo. Bot. Gard. 2002, 89, 199–224. [Google Scholar] [CrossRef]
- Beck, H.E.; Zimmermann, N.E.; McVicar, T.R.; Vergopolan, N.; Berg, A.; Wood, E.F. Present and future Köppen-Geiger climate classification maps at 1-km resolution. Sci. Data 2018, 5, 180214. [Google Scholar] [CrossRef] [PubMed]
- Sayre, R.; Comer, P.J.; Hak, J. A New Map of Standardized Terrestrail Ecosystems of Africa; Association of American Geographers: Washington, DC, USA, 2013; p. 24. [Google Scholar]
- Dimiceli, C.; Carroll, M.; Sohlberg, R.; Kim, D.H.; Kelly, M.; Townshend, J.R.G. MOD44B MODIS/Terra Vegetation Continuous Fields Yearly L3 Global 250m SIN Grid V006 [Data set]; NASA EOSDIS Land Processes DAAC: Sioux Falls, SD, USA, 2015. [Google Scholar] [CrossRef]
- Giglio, L.; Boschetti, L.; Roy, D.P.; Humber, M.L.; Justice, C.O. The Collection 6 MODIS burned area mapping algorithm and product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef] [PubMed]
- Ribeiro, N.S.; Matos, C.N.; Moura, I.R.; Washington-Allen, R.A.; Ribeiro, A.I. Monitoring vegetation dynamics and carbon stock density in miombo woodlands. Carbon Balance Manag. 2013, 8, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Wishart, M.; Couto, M.; Juizo, D. A Catchment Based Approach to the Conservation of Rivers and Management of the Niassa Reserve; Technical Report; Sociedade para a Gestão e Desenvolvimento da Reserva do Niassa Moçambique: Niassa Province, Mozambique, 2004. [Google Scholar]
- Riggio, J.; Jacobson, A.; Dollar, L.; Bauer, H.; Becker, M.; Dickman, A.; Funston, P.; Groom, R.; Henschel, P.; de Iongh, H.; et al. The size of savannah Africa: A lion’s (Panthera leo) view. Biodivers. Conserv. 2013, 22, 17–35. [Google Scholar] [CrossRef]
- Mbanze, A.A.; Ribeiro, N.S.; Vieira da Silva, C.; Santos, J.L. An expert-based approach to assess the potential for local people engagement in nature conservation: The case study of the Niassa National Reserve in Mozambique. J. Nat. Conserv. 2019, 52, 125759. [Google Scholar] [CrossRef]
- Yates, C.P.; Russell-Smith, J.; Murphy, B.P.; Desailly, M.; Evans, J.; Legge, S.; Lewis, F.; Lynch, D.; Edwards, A.C. Fuel accumulation, consumption and fire patchiness in the lower rainfall savanna region. In Carbon Accounting and Savanna Fire Management; CSIRO Publishing: Clayton, Australia, 2015; Chapter 6; pp. 115–132. [Google Scholar]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of drone altitude, image overlap, and optical sensor resolution on multi-view reconstruction of forest images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef]
- Burdziakowski, P. Evaluation of open drone map toolkit for geodetic grade aerial drone mapping–case study. Int. Multidiscip. Sci. Geoconference Surv. Geol. Min. Ecol. Manag. Sgem 2017, 17, 101–110. [Google Scholar] [CrossRef]
- Schwind, M.; Starek, M.J. Structure-from-Motion Photogrammetry: How to Produce High-Quality 3D Point Clouds. GIM Int. 2017, 31, 36–39. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127. [Google Scholar] [CrossRef]
- Anyamba, A.; Tucker, C.J. Historical perspectives on AVHRR NDVI and vegetation drought monitoring. In Remote Sensing of Drought: Innovative Monitoring Approaches; CRC Press: Boca Raton, FL, USA, 2012; pp. 23–49. [Google Scholar] [CrossRef]
- Lillesand, T.M.; Kiefer, R.W. Remote Sensing and Image Interpretation, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1994. [Google Scholar]
- Gandhi, G.M.; Parthiban, S.; Thummalu, N.; Christy, A. NDVI: Vegetation Change Detection Using Remote Sensing and GIS—A Case Study of Vellore District. Procedia Comput. Sci. 2015, 57, 1199–1210. [Google Scholar] [CrossRef]
- Martín, M.P.; Chuvieco Salinero, E. Cartografía de grandes incendios forestales en la Península Ibérica a partir de imágenes NOAA-AVHRR. Serie Geográfica 1997, 7, 109–128. [Google Scholar] [CrossRef]
- Chuvieco, E.; Martín, M.P.; Palacios, A. Assessment of different spectral indices in the red-near-infrared spectral domain for burned land discrimination. Int. J. Remote. Sens. 2002, 23, 5103–5110. [Google Scholar] [CrossRef]
- Martín, M.P.; Gómez, I.; Chuvieco, E. Burnt Area Index (BAIM) for burned area discrimination at regional scale using MODIS data. For. Ecol. Manag. 2006, 234, S221. [Google Scholar] [CrossRef]
- Clewley, D.; Bunting, P.; Shepherd, J.; Gillingham, S.; Flood, N.; Dymond, J.; Lucas, R.; Armston, J.; Moghaddam, M. A python-based open source system for Geographic Object-Based Image Analysis (GEOBIA) utilizing raster attribute tables. Remote Sens. 2014, 6, 6111–6135. [Google Scholar] [CrossRef]
- Abdulla, W. Mask R-CNN for Object Detection and Instance Segmentation on Keras and TensorFlow; GitHub. 2017. Available online: https://github.com/matterport/Mask_RCNN (accessed on 1 July 2020).
- Matthews, E. Global litter production, pools, and turnover times: Estimates from measurement data and regression models. J. Geophys. Res. Atmos. 1997, 102, 18771–18800. [Google Scholar] [CrossRef]
- Liu, C.; Westman, C.J.; Berg, B.; Kutsch, W.; Wang, G.Z.; Man, R.; Ilvesniemi, H.; Liutt, C.; Westmant, C.J.; Berg, B.; et al. Variation in Litterfall-Climate Relationships between Coniferous and Broadleaf Forests in Eurasia. Glob. Ecol. Biogeogr. 2004, 13, 105–114. [Google Scholar] [CrossRef]
- Chave, J.; Navarrete, D.; Almeida, S.; Álvarez, E.; Aragão, L.E.; Bonal, D.; Châtelet, P.; Silva-Espejo, J.E.; Goret, J.Y.; Von Hildebrand, P.; et al. Regional and seasonal patterns of litterfall in tropical South America. Biogeosciences 2010, 7, 43–55. [Google Scholar] [CrossRef]
- Neumann, M.; Ukonmaanaho, L.; Johnson, J.; Benham, S.; Vesterdal, L.; Novotný, R.; Verstraeten, A.; Lundin, L.; Thimonier, A.; Michopoulos, P.; et al. Quantifying Carbon and Nutrient Input From Litterfall in European Forests Using Field Observations and Modeling. Glob. Biogeochem. Cycles 2018, 32, 784–798. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]












| Fuel Class | Description |
|---|---|
| Grass | All living grasses and dead attached |
| Litter | All dead grass material and living not attached, leaf litter and any woody debris with diameter < 0.6 cm |
| Total fine | Sum of the grass and litter components |
| Coarse | Woody debris with diameter 0.6 cm ≤ x ≤ 5 cm |
| Heavy | Woody debris with diameter ≥ 5 cm |
| Shrubs | Live leafy vegetation with Diameter at Breast Height (DBH) < 5 cm and/or height < 2 m |
| Trees | Live leafy vegetation with DBH ≥ 5 cm and/or height ≥ 2 m |
| Feature | Source |
|---|---|
| TSF (days) | MCD64A1 C6 |
| Proportion of foliage (% area) | UAS classifier |
| Proportion of grass (% area) | UAS classifier |
| Proportion of bare soil (% area) | UAS classifier |
| Tree/shrub number | UAS image and Mask R-CNN |
| Total precipitation (m) | ERA-5 monthly 0.10.1 |
| Mean temperature (K) | ERA-5 monthly 0.10.1 |
| Mean surface net solar radiation (Jm) | ERA-5 monthly 0.10.1 |
| Total evaporation (m of water equivalent) | ERA-5 monthly 0.10.1 |
| Mean soil moisture (kg kg in the upper soil layer, 0–7 cm) | ERA-5 monthly 0.10.1 |
| Fuel Class | Model R | RMSE (min, max) | Mean % Error (min, max) | p-Value |
|---|---|---|---|---|
| Grass | 0.913 | 133.95 (6.13, 225.84) | 105.26 (2.41, 349.94) | 0.0007 |
| Litter | 0.867 | 71.44 (18.78, 109.07) | 158.14 (7.74, 909.88) | 0.002 |
| Total Fine | 0.769 | 111.53 (1.27, 184.09) | 23.09 (0.33, 59.19) | 0.009 |
| Coarse | 0.255 | 42.57 (4.14, 99.56) | 471.19 (7.80, 2048.56) | 0.009 |
| Shrubs | 0.513 | 13.89 (0.00, 28.00) | 73.03 (0.00, 300.00) | 0.007 |
| Trees | 0.807 | 1.81 (1.00, 3.00) | 67.38 (16.67, 100.00) | 0.006 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eames, T.; Russell-Smith, J.; Yates, C.; Edwards, A.; Vernooij, R.; Ribeiro, N.; Steinbruch, F.; van der Werf, G.R. Instantaneous Pre-Fire Biomass and Fuel Load Measurements from Multi-Spectral UAS Mapping in Southern African Savannas. Fire 2021, 4, 2. https://doi.org/10.3390/fire4010002
Eames T, Russell-Smith J, Yates C, Edwards A, Vernooij R, Ribeiro N, Steinbruch F, van der Werf GR. Instantaneous Pre-Fire Biomass and Fuel Load Measurements from Multi-Spectral UAS Mapping in Southern African Savannas. Fire. 2021; 4(1):2. https://doi.org/10.3390/fire4010002
Chicago/Turabian StyleEames, Tom, Jeremy Russell-Smith, Cameron Yates, Andrew Edwards, Roland Vernooij, Natasha Ribeiro, Franziska Steinbruch, and Guido R. van der Werf. 2021. "Instantaneous Pre-Fire Biomass and Fuel Load Measurements from Multi-Spectral UAS Mapping in Southern African Savannas" Fire 4, no. 1: 2. https://doi.org/10.3390/fire4010002
APA StyleEames, T., Russell-Smith, J., Yates, C., Edwards, A., Vernooij, R., Ribeiro, N., Steinbruch, F., & van der Werf, G. R. (2021). Instantaneous Pre-Fire Biomass and Fuel Load Measurements from Multi-Spectral UAS Mapping in Southern African Savannas. Fire, 4(1), 2. https://doi.org/10.3390/fire4010002