
Plasma Control: A Review of Developments and Applications of Plasma Medicine Control Mechanisms



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. An Overview on Control Concepts
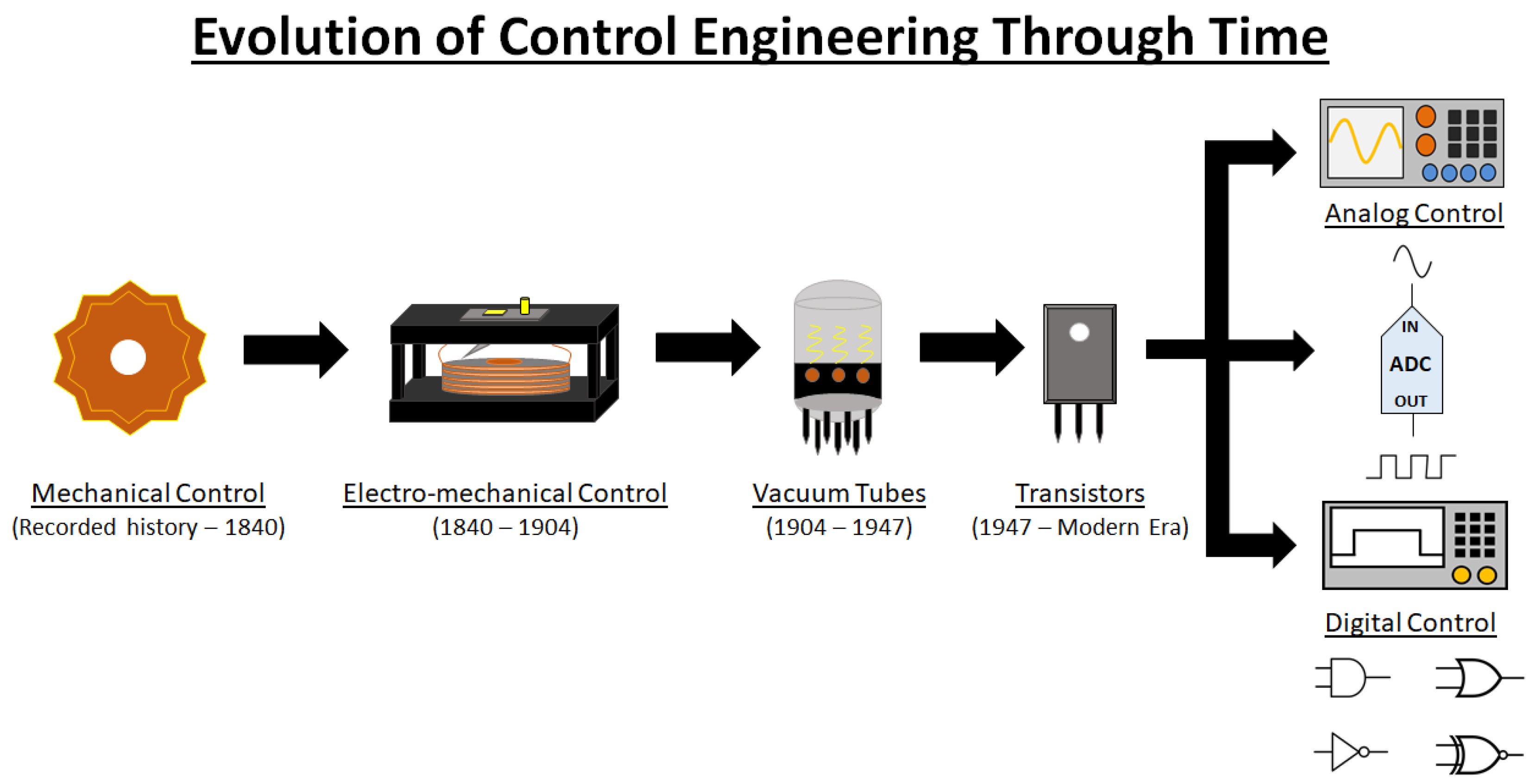
2.1. A Brief History of Control Engineering
2.2. Control Systems
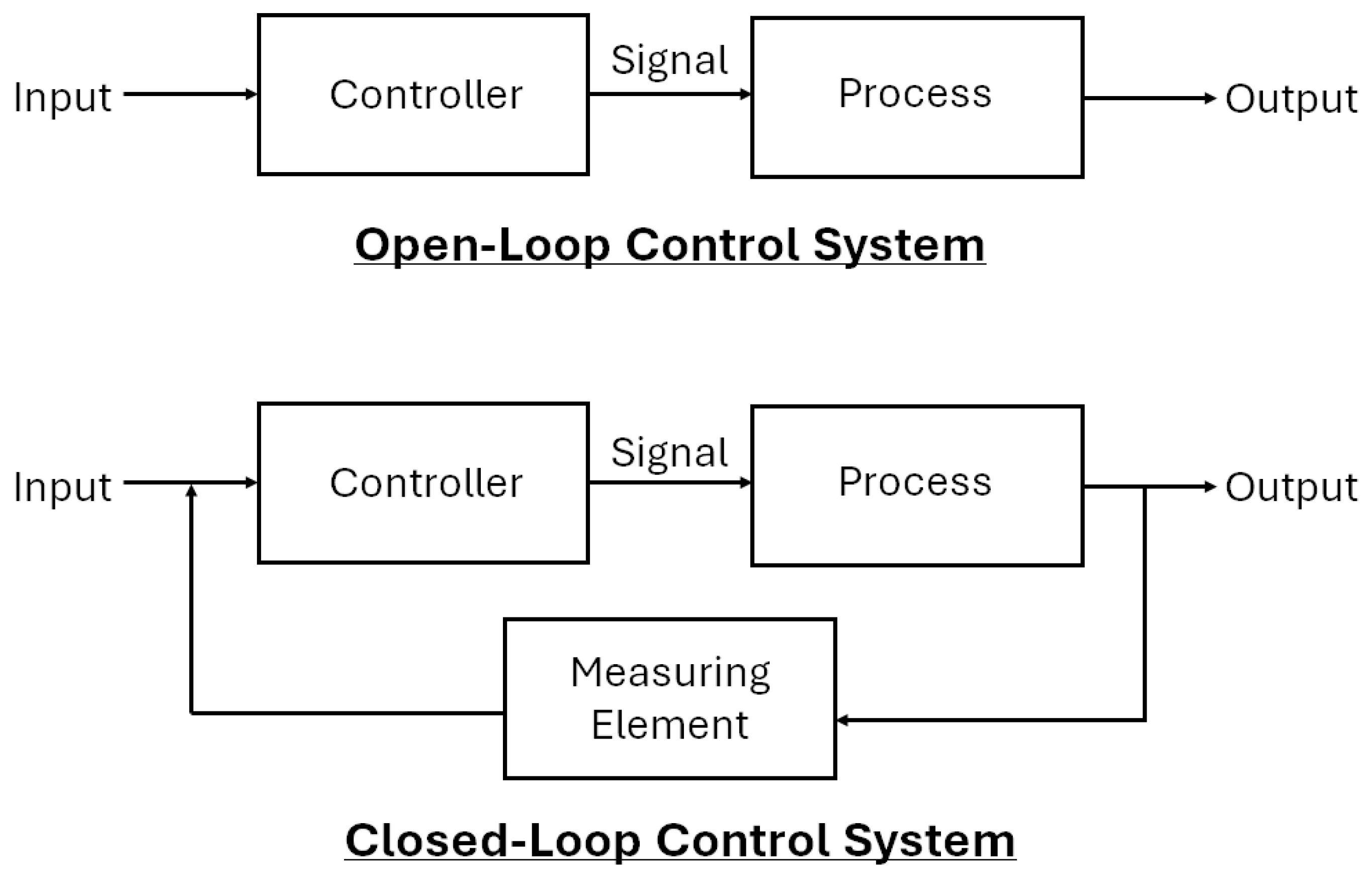
2.2.1. Open-Loop and Closed-Loop Systems
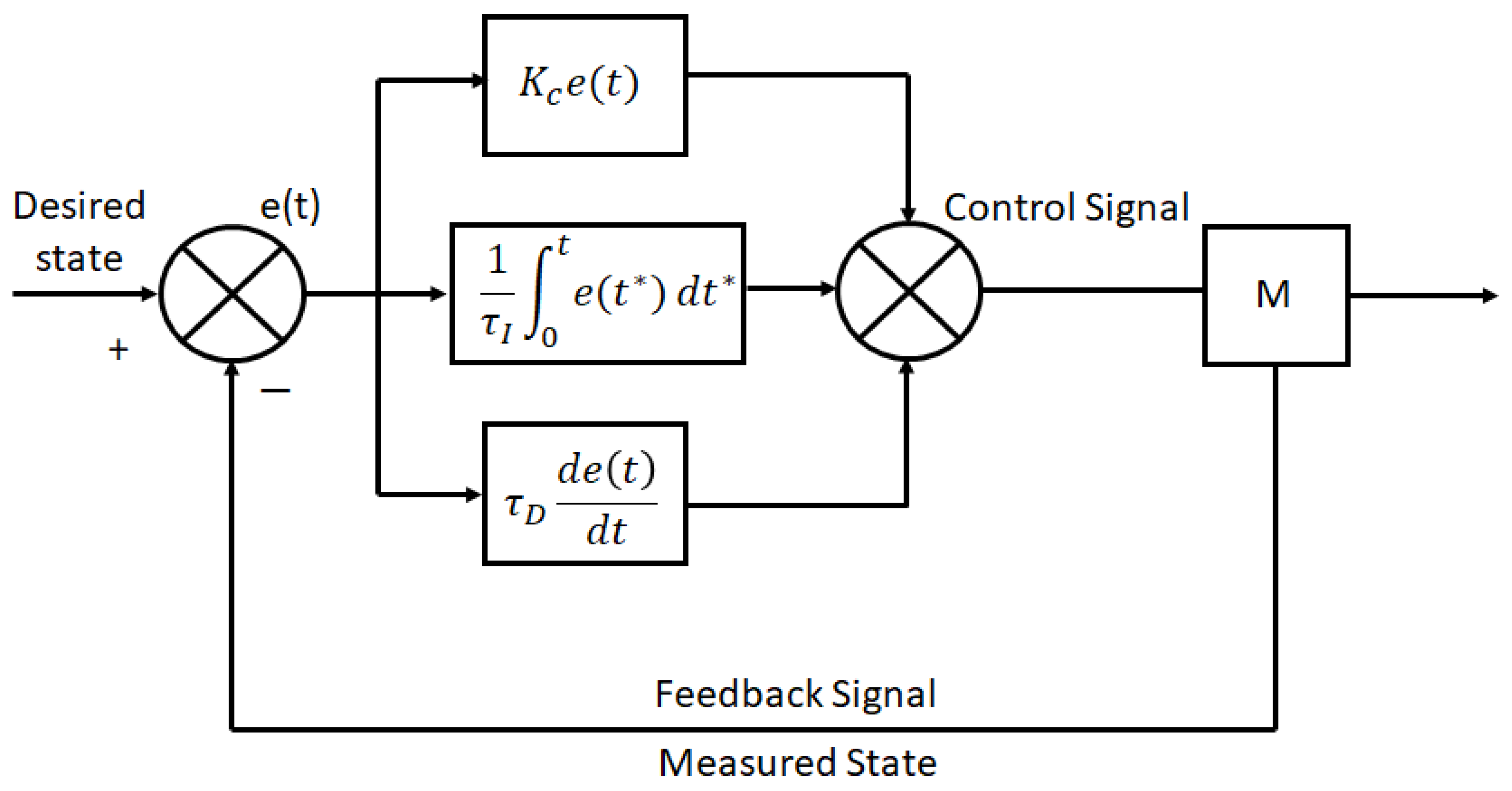
2.2.2. PID Controller
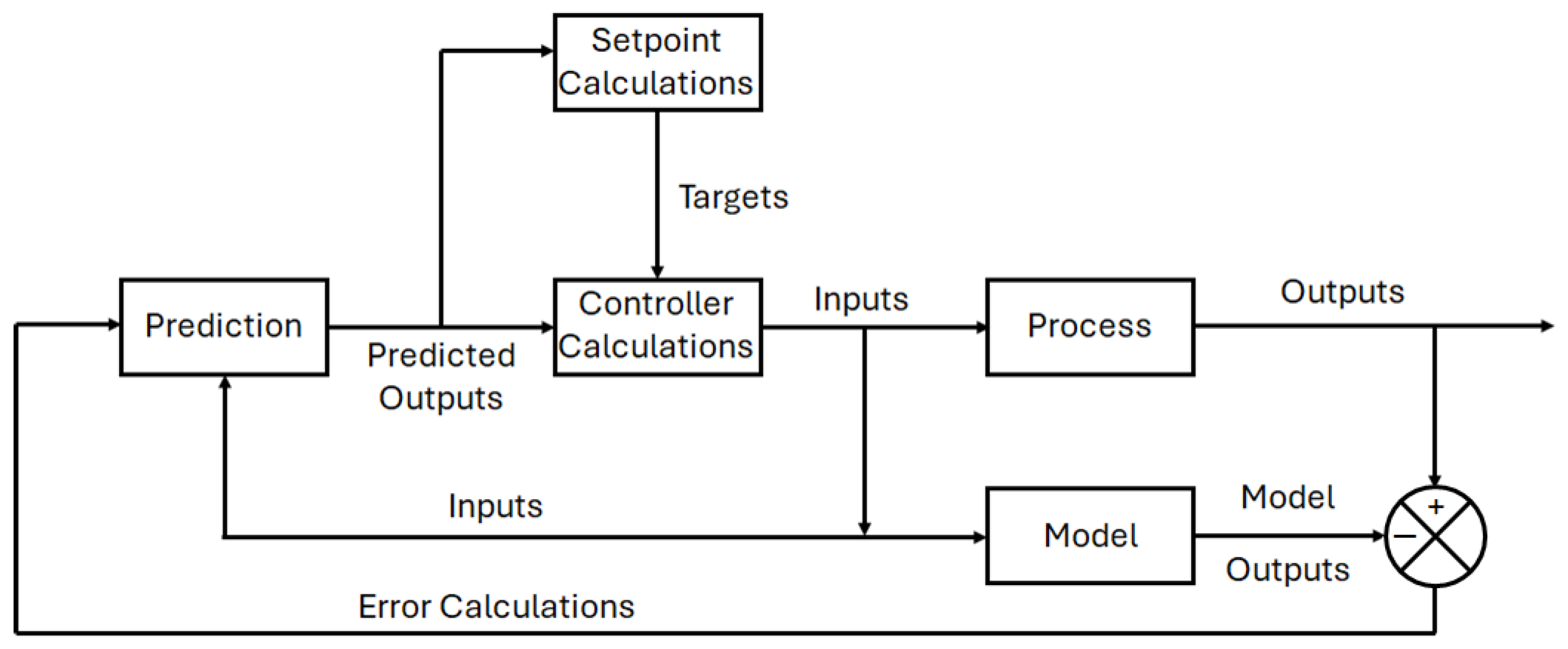
2.2.3. Advanced Process Control—Model Predictive Controller
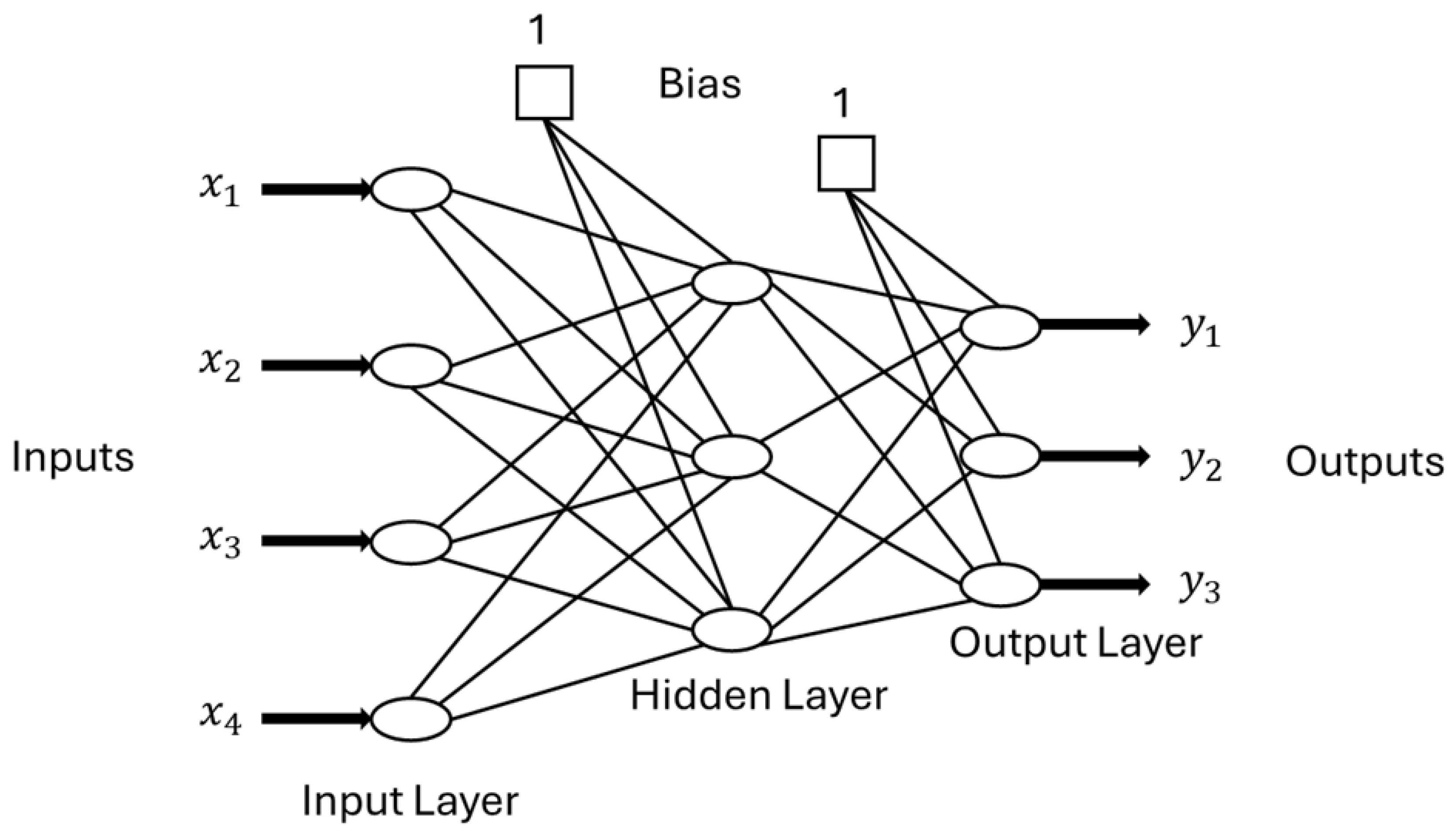
2.2.4. Artificial Neural Networks for nonlinear Model Predictive Controller
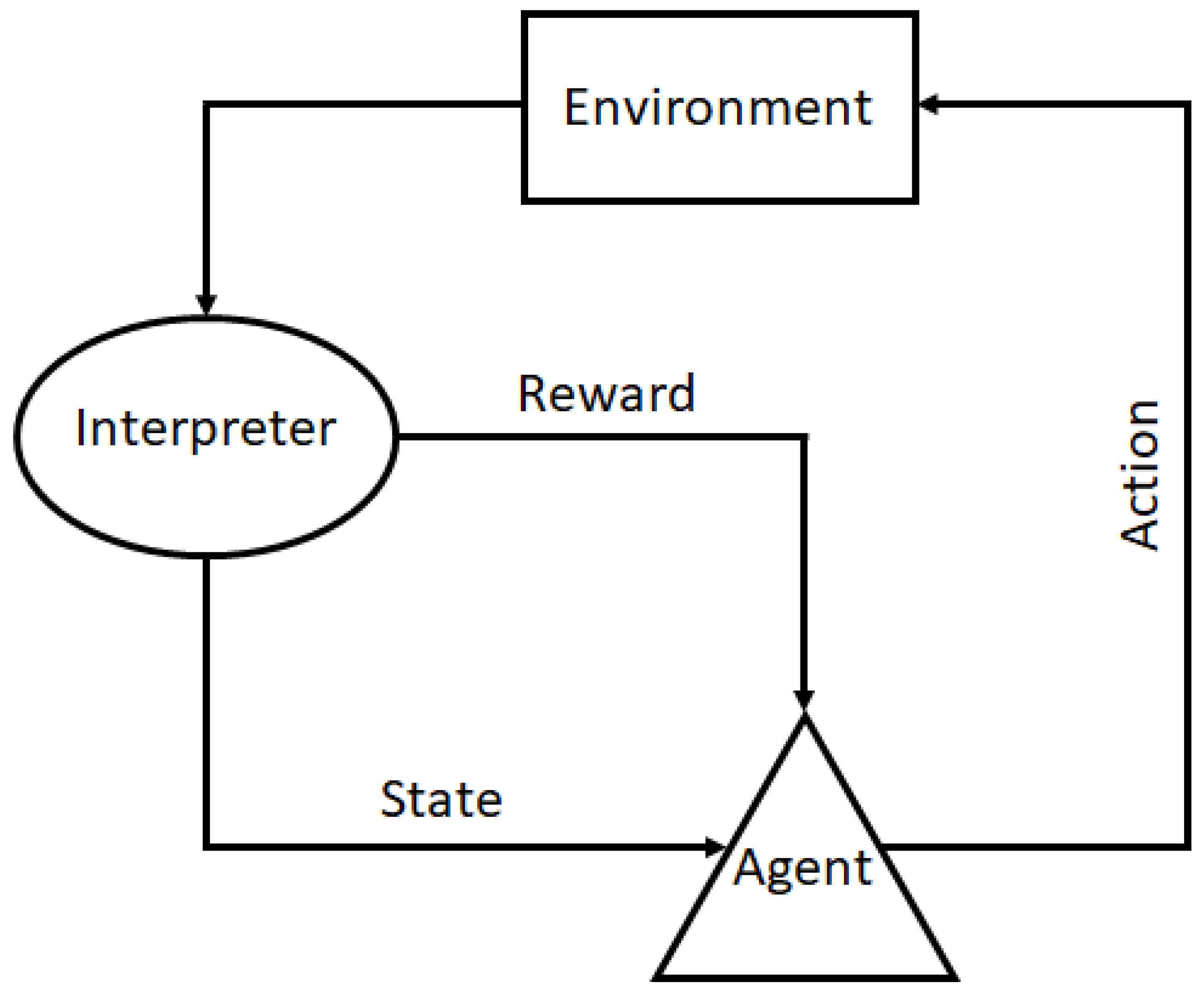
2.2.5. Reinforcement Learning Control
3. Plasma Control
3.1. Plasma Control Concepts
3.1.1. Etching and Deposition
3.1.2. Fusion
3.2. Plasma Control Parameters
3.2.1. Voltage Control
3.2.2. Current Control
3.2.3. Power Control
3.2.4. Flow Control
3.2.5. Frequency/External Signal Control
3.2.6. Treatment Time Control
4. Plasma Control in Medicine
4.1. A Brief History of Plasma Control in Medicine
4.2. Plasma Medicine Control Review
4.2.1. Substrate/Target Detection
4.2.2. PI Derived Plasma Control
4.2.3. MPC Derived Plasma Control
4.2.4. Neural Network/Machine Learning Derived Plasma Control
4.2.5. Reinforcement Learning Plasma Control
4.2.6. Personalized Plasma Control
5. Discussion
5.1. General Impact
5.2. Current Challenges
5.3. Recommendations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Von Woedtke, T.; Schmidt, A.; Bekeschus, S.; Wende, K.; Weltmann, K.D. Plasma medicine: A field of applied redox biology. In Vivo 2019, 33, 1011–1026. [Google Scholar] [CrossRef] [PubMed]
- Dümpelmann, M. Early seizure detection for closed loop direct neurostimulation devices in epilepsy. J. Neural Eng. 2019, 16, 041001. [Google Scholar] [CrossRef] [PubMed]
- Hajizadeh, I.; Rashid, M.; Cinar, A. Plasma-insulin-cognizant adaptive model predictive control for artificial pancreas systems. J. Process. Control 2019, 77, 97–113. [Google Scholar] [CrossRef] [PubMed]
- Stapelmann, K.; Gershman, S.; Miller, V. Plasma–liquid interactions in the presence of organic matter—A perspective. J. Appl. Phys. 2024, 135. [Google Scholar] [CrossRef] [PubMed]
- Lietz, A.M.; Kushner, M.J. Air plasma treatment of liquid covered tissue: Long timescale chemistry. J. Phys. D Appl. Phys. 2016, 49, 425204. [Google Scholar] [CrossRef]
- Sutter, J.; Brettschneider, J.; Mamchur, S.; Krebs, F.; Gershman, S.; Miller, V. Inclusion of Biological Targets in the Analysis of Electrical Characteristics of Non-Thermal Plasma Discharge. Plasma 2023, 6, 577–591. [Google Scholar] [CrossRef]
- Morsell, J.; Trosan, D.; Stapelmann, K.; Shannon, S. Plasma surface ionization wave interactions with single channels. Plasma Sources Sci. Technol. 2023, 32, 095017. [Google Scholar] [CrossRef]
- Vanraes, P.; Bogaerts, A. The essential role of the plasma sheath in plasma–liquid interaction and its applications—A perspective. J. Appl. Phys. 2021, 129. [Google Scholar] [CrossRef]
- Schoenbach, K.H.; Beebe, S.J.; Buescher, E.S. Intracellular effect of ultrashort electrical pulses. Bioelectromagn. J. Bioelectromagn. Soc. Soc. Phys. Regul. Biol. Med. Eur. Bioelectromagn. Assoc. 2001, 22, 440–448. [Google Scholar] [CrossRef] [PubMed]
- Brehmer, F.; Haenssle, H.A.; Daeschlein, G.; Ahmed, R.; Pfeiffer, S.; Goerlitz, A.; Simon, D.; Schön, M.P.; Wandke, D.; Emmert, S. Alleviation of chronic venous leg ulcers with a hand-held dielectric barrier discharge plasma generator (PlasmaDerm® VU-2010): Results of a monocentric, two-armed, open, prospective, randomized and controlled trial (NCT 01415622). J. Eur. Acad. Dermatol. Venereol. 2015, 29, 148–155. [Google Scholar] [CrossRef]
- Isbary, G.; Morfill, G.; Schmidt, H.; Georgi, M.; Ramrath, K.; Heinlin, J.; Karrer, S.; Landthaler, M.; Shimizu, T.; Steffes, B.; et al. A first prospective randomized controlled trial to decrease bacterial load using cold atmospheric argon plasma on chronic wounds in patients. Br. J. Dermatol. 2010, 163, 78–82. [Google Scholar] [CrossRef] [PubMed]
- Landels, J.G. Engineering in the Ancient World, Revised Edition: With a Revised Preface, a New Appendix, and a New Bibliography; University of California Press: Oakland, CA, USA, 2000. [Google Scholar]
- Ørsted, H.C.; Larson, A. The Discovery of Electromagnetism Made in the Year 1820 by HC Oersted: Published for the Oersted Committee at the Expense of the State; HH Thieles Bogtrykkeri: Copenhagen, Denmark, 1920. [Google Scholar]
- Mokyr, J. The second industrial revolution, 1870–1914. In Storia Dell’Economia Mondiale; Editori Laterza: Bari, Italy, 1998; Volume 21945. [Google Scholar]
- Improvement in the Mode of Communicating Information by Signals by the Application of Electromagnetism. U.S. Patent US1647A, 20 June 1840.
- Katiecs. Vacuum Tubes and the Birth of Electronics; Department of Electrical and Computer Engineering: Vancouver, BC, Canada, 2020. [Google Scholar]
- Dylla, H.; Corneliussen, S.T. John Ambrose Fleming and the beginning of electronics. J. Vac. Sci. Technol. A 2005, 23, 1244–1251. [Google Scholar] [CrossRef]
- Brinkman, W.F.; Haggan, D.E.; Troutman, W.W. A history of the invention of the transistor and where it will lead us. IEEE J.-Solid-State Circuits 1997, 32, 1858–1865. [Google Scholar] [CrossRef]
- Pennisi, S. The integrated circuit industry at a crossroads: Threats and opportunities. Chips 2022, 1, 150–171. [Google Scholar] [CrossRef]
- Neretti, G.; Popoli, A.; Scaltriti, S.G.; Cristofolini, A. Real Time Power Control in a High Voltage Power Supply for Dielectric Barrier Discharge Reactors: Implementation Strategy and Load Thermal Analysis. Electronics 2022, 11, 1536. [Google Scholar] [CrossRef]
- Afram, A.; Janabi-Sharifi, F. Theory and applications of HVAC control systems—A review of model predictive control (MPC). Build. Environ. 2014, 72, 343–355. [Google Scholar] [CrossRef]
- Sreekumar, T.; Jiji, K. Comparison of Proportional-Integral (PI) and Integral-Proportional (IP) controllers for speed control in vector controlled induction Motor drive. In Proceedings of the 2012 2nd International Conference on Power, Control and Embedded Systems, Allahabad, India, 17–19 December 2012; pp. 1–6. [Google Scholar]
- Desborough, L.; Miller, R. Increasing Customer Value of Industrial Control Performance Monitoring-Honeywell’s Experience. In Proceedings of the 2002 6th International Conference on Chemical Process Control, Tucson, AZ, USA, 7–12 January 2001; American Institute of Chemical Engineers: New York, NY, USA, 2002; Volume 326, pp. 172–192. [Google Scholar]
- Foley, M.W.; Julien, R.H.; Copeland, B.R. A comparison of PID controller tuning methods. Can. J. Chem. Eng. 2005, 83, 712–722. [Google Scholar] [CrossRef]
- Seborg, D.E.; Edgar, T.F.; Mellichamp, D.A.; Doyle, F.J., III. Process Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Nwokah, O.D. Pseudo-derivative feedback control. In Proceedings of the 1987 American Control Conference, Minneapolis, MN, USA, 10–12 June 1987; pp. 1811–1814. [Google Scholar]
- Wang, J.; Yan, J.D.; Jiang, L. Pseudo-derivative-feedback current control for three-phase grid-connected inverters with LCL filters. IEEE Trans. Power Electron. 2015, 31, 3898–3912. [Google Scholar] [CrossRef]
- Al Seyab, R.K.S. Nonlinear Model Predictive Control Using Automatic Differentiation. Ph.D. Thesis, Cranfield University, Bedford, UK, 2006. Available online: https://dspace.lib.cranfield.ac.uk/handle/1826/1491 (accessed on 1 February 2024).
- Gidon, D.; Graves, D.B.; Mesbah, A. Model predictive control of thermal effects of an atmospheric pressure plasma jet for biomedical applications. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 4889–4894. [Google Scholar]
- Johansen, T.A. Introduction to nonlinear model predictive control and moving horizon estimation. Sel. Top. Constrained Nonlinear Control 2011, 1, 1–53. [Google Scholar]
- Bonzanini, A.D.; Paulson, J.A.; Graves, D.B.; Mesbah, A. Toward safe dose delivery in plasma medicine using projected neural network-based fast approximate NMPC. IFAC-PapersOnLine 2020, 53, 5279–5285. [Google Scholar] [CrossRef]
- Papik, K.; Molnar, B.; Schaefer, R.; Dombovari, Z.; Tulassay, Z.; Feher, J. Application of neural networks in medicine—A review. Med. Sci. Monit. 1998, 4, 538–546. [Google Scholar]
- Sharifahmadian, A. Numerical Models for Submerged Breakwaters: Coastal Hydrodynamics and Morphodynamics; Butterworth-Heinemann: Oxford, UK, 2015. [Google Scholar]
- Zhao, S.K.; Kim, M.W.; Han, Y.S.; Jeon, S.Y.; Lee, Y.K.; Han, S.S. Radial basis function network for endpoint detection in plasma etch process. In Advances in Neural Network Research and Applications; Springer: Berlin/Heidelberg, Germany, 2010; pp. 253–263. [Google Scholar]
- Faria, R.d.R.; Capron, B.D.O.; Secchi, A.R.; de Souza, M.B., Jr. Where reinforcement learning meets process control: Review and guidelines. Processes 2022, 10, 2311. [Google Scholar] [CrossRef]
- Witman, M.; Gidon, D.; Graves, D.B.; Smit, B.; Mesbah, A. Sim-to-real transfer reinforcement learning for control of thermal effects of an atmospheric pressure plasma jet. Plasma Sources Sci. Technol. 2019, 28, 095019. [Google Scholar] [CrossRef]
- Bonzanini, A.D.; Shao, K.; Stancampiano, A.; Graves, D.B.; Mesbah, A. Perspectives on machine learning-assisted plasma medicine: Toward automated plasma treatment. IEEE Trans. Radiat. Plasma Med. Sci. 2021, 6, 16–32. [Google Scholar] [CrossRef]
- Graves, D.B. Lessons from tesla for plasma medicine. IEEE Trans. Radiat. Plasma Med. Sci. 2018, 2, 594–607. [Google Scholar] [CrossRef]
- Beck, R.B. Constant current versus constant voltage plasma anodization techniques. Appl. Surf. Sci. 1987, 30, 32–39. [Google Scholar] [CrossRef]
- Xiao, T.; Wu, Z.; Christofides, P.D.; Armaou, A.; Ni, D. Recurrent neural-network-based model predictive control of a plasma etch process. Ind. Eng. Chem. Res. 2021, 61, 638–652. [Google Scholar] [CrossRef]
- Bellido-González, V.; Daniel, B.; Counsell, J.; Monaghan, D. Reactive gas control of non-stable plasma conditions. Thin Solid Film. 2006, 502, 34–39. [Google Scholar] [CrossRef]
- Poulsen, R. Plasma etching in integrated circuit manufacture—A review. J. Vac. Sci. Technol. 1977, 14, 266–274. [Google Scholar] [CrossRef]
- Goodlin, B.E.; Boning, D.S.; Sawin, H.H. Quantitative Analysis and Comparison of Endpoint Detection Based on Multiple Wavelength Analysis. In Proceedings of the 201st Meeting of the Electrochemical Society, International Symposium on Plasma Processing XIV, Abs, Philadelphia, PA, USA, 12–17 May 2002; Volume 415, pp. 1–30. [Google Scholar]
- Kim, C.S.; Lee, H.J.; Roh, H.R.; Park, T.; Lee, Y.; Han, J.; Kwon, S.; Lee, C.; Sun, J.; Yoon, K.; et al. Improvement of Plasma Etching Endpoint Detection with Data-driven Wavelength Selection and Gaussian Mixture Model. IEEE Trans. Semicond. Manuf. 2023, 36, 389–397. [Google Scholar] [CrossRef]
- Stevenson, J.O.; Ward, P.P.; Smith, M.L.; Markle, R.J. A plasma process monitor/control system. Surf. Interface Anal. 1998, 26, 124–133. [Google Scholar] [CrossRef]
- Ibbotson, D.E.; Lee, T.C.; Maynard, H.L.; Rietman, E.A. Active Neural Network Determination of Endpoint in a Plasma Etch Process. U.S. Patent 5,653,894, 5 August 1997. [Google Scholar]
- Frye, R.C.; Harry, T.R.; Lory, E.R.; Rietman, E.A. Active Neural Network Control of Wafer Attributes in a Plasma Etch Process. U.S. Patent 5,467,883, 6 June 1995. [Google Scholar]
- Woelfel, C.; Oberberg, M.; Berger, B.; Engel, D.; Brinkmann, R.; Awakowicz, P.; Lunze, J.; Schulze, J. The Multipole Resonance Probe-based controller: A technology to investigate plasma-based deposition. J. Instrum. 2019, 14, P10007. [Google Scholar] [CrossRef]
- Schulz, C.; Styrnoll, T.; Awakowicz, P.; Rolfes, I. The planar multipole resonance probe: Challenges and prospects of a planar plasma sensor. IEEE Trans. Instrum. Meas. 2014, 64, 857–864. [Google Scholar] [CrossRef]
- Styrnoll, T.; Harhausen, J.; Lapke, M.; Storch, R.; Brinkmann, R.; Foest, R.; Ohl, A.; Awakowicz, P. Process diagnostics and monitoring using the multipole resonance probe in an inhomogeneous plasma for ion-assisted deposition of optical coatings. Plasma Sources Sci. Technol. 2013, 22, 045008. [Google Scholar] [CrossRef]
- Piejak, R.; Godyak, V.; Garner, R.; Alexandrovich, B.; Sternberg, N. The hairpin resonator: A plasma density measuring technique revisited. J. Appl. Phys. 2004, 95, 3785–3791. [Google Scholar] [CrossRef]
- Peterson, D.J.; Kraus, P.; Chua, T.C.; Larson, L.; Shannon, S.C. Electron neutral collision frequency measurement with the hairpin resonator probe. Plasma Sources Sci. Technol. 2017, 26, 095002. [Google Scholar] [CrossRef]
- Godyak, V.; Sternberg, N. Plasma density distribution and its perturbation by probes in axially symmetrical plasma. J. Appl. Phys. 2024, 135, 013302. [Google Scholar] [CrossRef]
- Godyak, V.; Alexandrovich, B. Comparative analyses of plasma probe diagnostics techniques. J. Appl. Phys. 2015, 118, 233302. [Google Scholar] [CrossRef]
- Cho, K.; Shao, K.; Mesbah, A. Run-indexed time-varying Bayesian optimization with positional encoding for auto-tuning of controllers: Application to a plasma-assisted deposition process with run-to-run drifts. Comput. Chem. Eng. 2024, 185, 108653. [Google Scholar] [CrossRef]
- Tuck, J.L. Review of Controlled Thermonuclear Research at Los Alamos for Mid 1958; Technical Report INIS-XU–022; United Nations: Geneva, Switzerland, 1958. [Google Scholar]
- Haines, M. The Joule heating of a stable pinched plasma. Proc. Phys. Soc. 1960, 76, 250. [Google Scholar] [CrossRef]
- Phillips, J.A.; Tuck, P.S.J. Magnetic fusion. Los Alamos Sci. 1983, 4, 64–67. [Google Scholar]
- De Tommasi, G. Plasma magnetic control in tokamak devices. J. Fusion Energy 2019, 38, 406–436. [Google Scholar] [CrossRef]
- Degrave, J.; Felici, F.; Buchli, J.; Neunert, M.; Tracey, B.; Carpanese, F.; Ewalds, T.; Hafner, R.; Abdolmaleki, A.; de Las Casas, D.; et al. Magnetic control of tokamak plasmas through deep reinforcement learning. Nature 2022, 602, 414–419. [Google Scholar] [CrossRef] [PubMed]
- Kurihara, K.; Lister, J.; Humphreys, D.; Ferron, J.; Treutterer, W.; Sartori, F.; Felton, R.; Brémond, S.; Moreau, P.; Contributors, J.E. Plasma control systems relevant to ITER and fusion power plants. Fusion Eng. Des. 2008, 83, 959–970. [Google Scholar] [CrossRef]
- Sotnikova, M. Plasma stabilization based on model predictive control. Int. J. Mod. Phys. A 2009, 24, 999–1008. [Google Scholar] [CrossRef]
- Trosan, D.; Walther, P.; McLaughlin, S.; Salvi, D.; Mazzeo, A.; Stapelmann, K. Analysis of the effects of complex electrode geometries on the energy deposition and temporally and spatially averaged electric field measurements of surface dielectric barrier discharges. Plasma Process. Polym. 2023, 21, e2300133. [Google Scholar] [CrossRef]
- Xu, L.; Liu, D.; Liu, W.; Xing, D. Self-Tuning Sinusoidal Power Supply For Atmospheric Pressure Air Surface Dielectric Barrier Discharge. In Proceedings of the 2023 IEEE 6th International Electrical and Energy Conference (CIEEC), Hefei, China, 12–14 May 2023; pp. 1959–1965. [Google Scholar]
- De Tommasi, G.; Maviglia, F.; Neto, A.; Lomas, P.; McCullen, P.; Rimini, F.G.; Contributors, J.E. Plasma position and current control system enhancements for the JET ITER-like wall. Fusion Eng. Des. 2014, 89, 233–242. [Google Scholar] [CrossRef]
- Hussein, R.; Zhang, P.; Nie, X.; Xia, Y.; Northwood, D. The effect of current mode and discharge type on the corrosion resistance of plasma electrolytic oxidation (PEO) coated magnesium alloy AJ62. Surf. Coatings Technol. 2011, 206, 1990–1997. [Google Scholar] [CrossRef]
- Shin, H.; King, C.C.; Horiuchi, T.; Hu, C. Thin oxide charging current during plasma etching of aluminum. IEEE Electron Device Lett. 1991, 12, 404–406. [Google Scholar] [CrossRef]
- Taylor, S.; Eccleston, W.; Barlow, K. Theory for the plasma anodization of silicon under constant voltage and constant current conditions. J. Appl. Phys. 1988, 64, 6515–6522. [Google Scholar] [CrossRef]
- Peeters, J.; Li, L. A new model for the plasma anodization of silicon at constant current. J. Appl. Phys. 1992, 72, 719–724. [Google Scholar] [CrossRef]
- Nastuta, A.V.; Gerling, T. Cold atmospheric pressure plasma jet operated in Ar and He: From basic plasma properties to vacuum ultraviolet, electric field and safety thresholds measurements in plasma medicine. Appl. Sci. 2022, 12, 644. [Google Scholar] [CrossRef]
- Ohtsu, Y.; Nagamatsu, K. Atmospheric-pressure plasma jet system for silicon etching without fluorocarbon gas feed. Jpn. J. Appl. Phys. 2017, 57, 01AB01. [Google Scholar] [CrossRef]
- Tümmel, S.; Mertens, N.; Wang, J.; Viöl, W. Low temperature plasma treatment of living human cells. Plasma Process. Polym. 2007, 4, S465–S469. [Google Scholar] [CrossRef]
- Van Gils, C.; Hofmann, S.; Boekema, B.; Brandenburg, R.; Bruggeman, P. Mechanisms of bacterial inactivation in the liquid phase induced by a remote RF cold atmospheric pressure plasma jet. J. Phys. Appl. Phys. 2013, 46, 175203. [Google Scholar] [CrossRef]
- Kang, S.; Kim, H.; Yun, G.; Lee, J. Portable microwave air plasma device for wound healing. Plasma Sources Sci. Technol. 2015, 24, 035020. [Google Scholar] [CrossRef]
- Koo, J.; Park, D.; Ryu, S.; Kim, G.H.; Lee, Y.W. Design of a self-tuning adaptive model predictive controller using recursive model parameter estimation for real-time plasma variable control. Comput. Chem. Eng. 2019, 123, 126–142. [Google Scholar] [CrossRef]
- Heimann, R.B. Plasma-Spray Coating: Principles and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Jelil, R.A. A review of low-temperature plasma treatment of textile materials. J. Mater. Sci. 2015, 50, 5913–5943. [Google Scholar] [CrossRef]
- Kembaiyan, K.; Keshavan, K. Combating severe fluid erosion and corrosion of drill bits using thermal spray coatings. Wear 1995, 186, 487–492. [Google Scholar] [CrossRef]
- Sandhu, H.S.; Phull, G.S.; Saini, M.S.; Preet Singh, J.I.; Gulati, P. A review: Bio-compatible thermal spray coating on bio-implant. In Recent Trends in Engineering Design: Select Proceedings of ICAST 2020; Springer: Singapore, 2021; pp. 71–77. [Google Scholar]
- Chen, G.; Chen, Z.; Wang, Z.; Obenchain, R.; Wen, D.; Li, H.; Wirz, R.E.; Gu, Z. Portable air-fed cold atmospheric plasma device for postsurgical cancer treatment. Sci. Adv. 2021, 7, eabg5686. [Google Scholar] [CrossRef]
- Shi, X.; Liu, S.; Jiang, R.; Chen, J.; Jin, S.; Mei, D.; Zhou, R.; Fang, Z.; Cullen, P.J. Development and characterization of touchable air plasma jet device for inactivation of oral bacteria. Results Phys. 2022, 36, 105405. [Google Scholar] [CrossRef]
- Chabert, P.; Braithwaite, N. Physics of Radio-Frequency Plasmas; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Kogelheide, F.; Offerhaus, B.; Bibinov, N.; Krajinski, P.; Schücke, L.; Schulze, J.; Stapelmann, K.; Awakowicz, P. Characterisation of volume and surface dielectric barrier discharges in N2–O2 mixtures using optical emission spectroscopy. Plasma Process. Polym. 2020, 17, 1900126. [Google Scholar] [CrossRef]
- Neretti, G.; Ricco, M. Self-tuning high-voltage and high-frequency sinusoidal power supply for dielectric barrier discharge plasma generation. Electronics 2019, 8, 1137. [Google Scholar] [CrossRef]
- Semmler, M.L.; Bekeschus, S.; Schäfer, M.; Bernhardt, T.; Fischer, T.; Witzke, K.; Seebauer, C.; Rebl, H.; Grambow, E.; Vollmar, B.; et al. Molecular mechanisms of the efficacy of cold atmospheric pressure plasma (CAP) in cancer treatment. Cancers 2020, 12, 269. [Google Scholar] [CrossRef] [PubMed]
- Lynn, S.A.; MacGearailt, N.; Ringwood, J.V. Real-time virtual metrology and control for plasma etch. J. Process. Control 2012, 22, 666–676. [Google Scholar] [CrossRef]
- Strong, F.F. High-Frequency Currents; Rebman: London, UK, 1908. [Google Scholar]
- Eberhart, N.M. A Working Manual of High Frequency Currents; New Medicine Publishing Company: Chicago, IL, USA, 1913. [Google Scholar]
- Crook, H.E. High Frequency Currents: Their Production, Physical Properties, Physiological Effects, and Therapeutical Uses; Baillière, Tindall and Cox: Reading, UK, 1906. [Google Scholar]
- Collet, G.; Robert, E.; Lenoir, A.; Vandamme, M.; Darny, T.; Dozias, S.; Kieda, C.; Pouvesle, J.M. Plasma jet-induced tissue oxygenation: Potentialities for new therapeutic strategies. Plasma Sources Sci. Technol. 2014, 23, 012005. [Google Scholar] [CrossRef]
- Heuer, K.; Hoffmanns, M.A.; Demir, E.; Baldus, S.; Volkmar, C.M.; Röhle, M.; Fuchs, P.C.; Awakowicz, P.; Suschek, C.V.; Opländer, C. The topical use of non-thermal dielectric barrier discharge (DBD): Nitric oxide related effects on human skin. Nitric Oxide 2015, 44, 52–60. [Google Scholar] [CrossRef] [PubMed]
- Laroussi, M. Sterilization of contaminated matter with an atmospheric pressure plasma. IEEE Trans. Plasma Sci. 1996, 24, 1188–1191. [Google Scholar] [CrossRef]
- Miller, V.; Lin, A.; Fridman, G.; Dobrynin, D.; Fridman, A. Plasma stimulation of migration of macrophages. Plasma Process. Polym. 2014, 11, 1193–1197. [Google Scholar] [CrossRef]
- Morrison, C.F., Jr. Electrosurgical Method and Apparatus for Initiating an Electrical Discharge in an Inert Gas Flow. U.S. Patent 4,040,426, 9 August 1977. [Google Scholar]
- Zenker, M. Argon plasma coagulation. GMS Krankenhaushygiene Interdiszip. 2008, 3, Doc15. [Google Scholar]
- Metelmann, H.R.; Seebauer, C.; Miller, V.; Fridman, A.; Bauer, G.; Graves, D.B.; Pouvesle, J.M.; Rutkowski, R.; Schuster, M.; Bekeschus, S.; et al. Clinical experience with cold plasma in the treatment of locally advanced head and neck cancer. Clin. Plasma Med. 2018, 9, 6–13. [Google Scholar] [CrossRef]
- Adamovich, I.; Agarwal, S.; Ahedo, E.; Alves, L.L.; Baalrud, S.; Babaeva, N.; Bogaerts, A.; Bourdon, A.; Bruggeman, P.; Canal, C.; et al. The 2022 Plasma Roadmap: Low temperature plasma science and technology. J. Phys. Appl. Phys. 2022, 55, 373001. [Google Scholar] [CrossRef]
- Noh, H.T.; Kim, D.I.; Han, S.S. Real time endpoint detection in plasma etching using Real-Time Decision Making Algorithm. In Proceedings of the 2015 China Semiconductor Technology International Conference, Shanghai, China, 15–16 March 2015; pp. 1–3. [Google Scholar]
- Oh, J.S.; Kojima, S.; Sasaki, M.; Hatta, A.; Kumagai, S. Plasma cell treatment device Plasma-on-Chip: Monitoring plasma-generated reactive species in microwells. Sci. Rep. 2017, 7, 41953. [Google Scholar] [CrossRef]
- Gjika, E.; Pal-Ghosh, S.; Tang, A.; Kirschner, M.; Tadvalkar, G.; Canady, J.; Stepp, M.A.; Keidar, M. Adaptation of operational parameters of cold atmospheric plasma for in vitro treatment of cancer cells. ACS Appl. Mater. Interfaces 2018, 10, 9269–9279. [Google Scholar] [CrossRef]
- Morishita, Y.; Murakami, S.; Kenmochi, N.; Funaba, H.; Yamada, I.; Mizuno, Y.; Nagahara, K.; Nuga, H.; Seki, R.; Yokoyama, M.; et al. First application of data assimilation-based control to fusion plasma. Sci. Rep. 2024, 14, 137. [Google Scholar] [CrossRef] [PubMed]
- Gidon, D.; Graves, D.B.; Mesbah, A. Effective dose delivery in atmospheric pressure plasma jets for plasma medicine: A model predictive control approach. Plasma Sources Sci. Technol. 2017, 26, 085005. [Google Scholar] [CrossRef]
- Chan, K.J.; Makrygiorgos, G.; Mesbah, A. Towards personalized plasma medicine via data-efficient adaptation of fast deep learning-based MPC policies. In Proceedings of the 2023 American Control Conference (ACC), San Diego, CA, USA, 31 May–2 June 2023; pp. 2769–2775. [Google Scholar]
- Hou, Z.; Lee, T.; Keidar, M. Reinforcement learning with safe exploration for adaptive plasma cancer treatment. IEEE Trans. Radiat. Plasma Med. Sci. 2021, 6, 482–492. [Google Scholar] [CrossRef]
- Gidon, D.; Graves, D.B.; Mesbah, A. Predictive control of 2D spatial thermal dose delivery in atmospheric pressure plasma jets. Plasma Sources Sci. Technol. 2019, 28, 085001. [Google Scholar] [CrossRef]
- Hofmann, S.; van Gils, K.; van der Linden, S.; Iseni, S.; Bruggeman, P. Time and spatial resolved optical and electrical characteristics of continuous and time modulated RF plasmas in contact with conductive and dielectric substrates. Eur. Phys. J. D 2014, 68. [Google Scholar] [CrossRef]
- Dubreuil, P.; Belharet, D. Plasma impedance monitoring for real time endpoint detection of bulk materials etched in ICP tool. Microelectron. Eng. 2010, 87, 2275–2281. [Google Scholar] [CrossRef]
- Ohno, S.; Takasawa, N.; Sato, Y.; Yoshikawa, M.; Suzuki, K.; Frach, P.; Shigesato, Y. Photocatalytic TiO2 films deposited by reactive magnetron sputtering with unipolar pulsing and plasma emission control systems. Thin Solid Films 2006, 496, 126–130. [Google Scholar] [CrossRef]
- Behmani, D.; Keidar, M.; Bhattacharjee, S. Frequency-locked measurement of floating potential fluctuations in cold micro-plasma jets: Interactive surface feedback effects on reactive species generation. Phys. Plasmas 2024, 31, 033505. [Google Scholar] [CrossRef]
- Sapareto, S.A.; Dewey, W.C. Thermal dose determination in cancer therapy. Int. J. Radiat. Oncol. Biol. Phys. 1984, 10, 787–800. [Google Scholar] [CrossRef]
- Gidon, D.; Abbas, H.S.; Bonzanini, A.D.; Graves, D.B.; Velni, J.M.; Mesbah, A. Data-driven LPV model predictive control of a cold atmospheric plasma jet for biomaterials processing. Control Eng. Pract. 2021, 109, 104725. [Google Scholar] [CrossRef]
- Lyu, Y.; Lin, L.; Gjika, E.; Lee, T.; Keidar, M. Mathematical modeling and control for cancer treatment with cold atmospheric plasma jet. J. Phys. D Appl. Phys. 2019, 52, 185202. [Google Scholar] [CrossRef]
- Trieschmann, J.; Vialetto, L.; Gergs, T. Machine learning for advancing low-temperature plasma modeling and simulation. J. Micro/Nanopatterning Mater. Metrol. 2023, 22, 041504. [Google Scholar] [CrossRef]
- Gidon, D.; Pei, X.; Bonzanini, A.D.; Graves, D.B.; Mesbah, A. Machine learning for real-time diagnostics of cold atmospheric plasma sources. IEEE Trans. Radiat. Plasma Med. Sci. 2019, 3, 597–605. [Google Scholar] [CrossRef]
- Kaelbling, L.P.; Littman, M.L.; Moore, A.W. Reinforcement learning: A survey. J. Artif. Intell. Res. 1996, 4, 237–285. [Google Scholar] [CrossRef]
- Shao, K.; Romeres, D.; Chakrabarty, A.; Mesbah, A. Preference-Guided Bayesian Optimization for Control Policy Learning: Application to Personalized Plasma Medicine. In Proceedings of the NeurIPS 2023 Workshop on Adaptive Experimental Design and Active Learning in the Real World, New Orleans, LA, USA, 14 December 2023. [Google Scholar]
- Tang, W.M.; Chan, V. Advances and challenges in computational plasma science. Plasma Phys. Control. Fusion 2005, 47, R1. [Google Scholar] [CrossRef]
- Miklos, D.B.; Remy, C.; Jekel, M.; Linden, K.G.; Drewes, J.E.; Hübner, U. Evaluation of advanced oxidation processes for water and wastewater treatment–A critical review. Water Res. 2018, 139, 118–131. [Google Scholar] [CrossRef]
- Ranieri, P.; Sponsel, N.; Kizer, J.; Rojas-Pierce, M.; Hernández, R.; Gatiboni, L.; Grunden, A.; Stapelmann, K. Plasma agriculture: Review from the perspective of the plant and its ecosystem. Plasma Process. Polym. 2021, 18, 2000162. [Google Scholar] [CrossRef]
- Weng, L.; Zhang, S.; Shi, X.; Zheng, L.; Ye, Q.; Qi, K.; Liu, Y. Experimental study and application analysis of pulsed corona discharge plasma technology for odor control. In Proceedings of the 2021 Power System and Green Energy Conference (PSGEC), Shanghai, China, 20–22 August 2021; pp. 257–261. [Google Scholar]
- Baleriola, S.; Leroy, A.; Loyer, S.; Devinant, P.; Aubrun, S. Circulation control on a rounded trailing-edge wind turbine airfoil using plasma actuators. J. Phys. Conf. Ser. 2016, 753, 052001. [Google Scholar] [CrossRef]
- Cui, H.; Wang, Q.; Rai, R.; Salvi, D.; Nitin, N. DNA-based surrogates for the validation of microbial inactivation using cold atmospheric pressure plasma and plasma-activated water processing. J. Food Eng. 2023, 339, 111267. [Google Scholar] [CrossRef]
- Ercan, U.K.; Özdemir, G.D.; Özdemir, M.A.; Güren, O. Plasma medicine: The era of artificial intelligence. Plasma Process. Polym. 2023, 20, e2300066. [Google Scholar] [CrossRef]
- Korolov, I.; Donko, Z.; Hübner, G.; Bischoff, L.; Hartmann, P.; Gans, T.; Liu, Y.; Mussenbrock, T.; Schulze, J. Control of electron dynamics, radical and metastable species generation in atmospheric pressure RF plasma jets by voltage waveform tailoring. Plasma Sources Sci. Technol. 2019, 28, 094001. [Google Scholar] [CrossRef]
- Leimberger, E. The control of noble gas-filled low-pressure arc discharges using a grid in the plasma of the discharge. J. Phys. 1941, 117, 621–641. [Google Scholar]
- Brown, I.G.; Compher, A.B.; Ehlers, K.W.; Hopkins, D.B.; Kunkel, W.B.; Rostler, P.S. Feedback-controlled steady-state plasma. Plasma Phys. 1971, 13, 47. [Google Scholar] [CrossRef]
- Hirobe, K.; Tsuchimoto, T. End point detection in plasma etching by optical emission spectroscopy. J. Electrochem. Soc. 1980, 127, 234–235. [Google Scholar] [CrossRef]
- Tsai, C.; Anderson, G.; Thompson, R.; Wacker, B. Control of silicon network structure in plasma deposition. J.-Non-Cryst. Solids 1989, 114, 151–153. [Google Scholar] [CrossRef]
- Moreau, E. Airflow control by non-thermal plasma actuators. J. Phys. D Appl. Phys. 2007, 40, 605. [Google Scholar] [CrossRef]
- Bruggeman, P.J.; Kushner, M.J.; Locke, B.R.; Gardeniers, J.G.E.; Graham, W.G.; Graves, D.B.; Hofman-Caris, R.C.H.M.; Maric, D.; Reid, J.P.; Ceriani, E.; et al. Plasma–liquid interactions: A review and roadmap. Plasma Sources Sci. Technol. 2016, 25, 053002. [Google Scholar] [CrossRef]
- Gorbanev, Y.; Golda, J.; Schulz-von der Gathen, V.; Bogaerts, A. Applications of the COST plasma jet: More than a reference standard. Plasma 2019, 2, 316–327. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thomas, J.E.; Stapelmann, K. Plasma Control: A Review of Developments and Applications of Plasma Medicine Control Mechanisms. Plasma 2024, 7, 386-426. https://doi.org/10.3390/plasma7020022
Thomas JE, Stapelmann K. Plasma Control: A Review of Developments and Applications of Plasma Medicine Control Mechanisms. Plasma. 2024; 7(2):386-426. https://doi.org/10.3390/plasma7020022
Chicago/Turabian StyleThomas, Jonathan E., and Katharina Stapelmann. 2024. "Plasma Control: A Review of Developments and Applications of Plasma Medicine Control Mechanisms" Plasma 7, no. 2: 386-426. https://doi.org/10.3390/plasma7020022
APA StyleThomas, J. E., & Stapelmann, K. (2024). Plasma Control: A Review of Developments and Applications of Plasma Medicine Control Mechanisms. Plasma, 7(2), 386-426. https://doi.org/10.3390/plasma7020022