Innovation Potentials and Pathways Merging AI, CPS, and IoT


1
University of Twente, Department of Industrial Engineering and Business Information Systems (IEBIS), Drienerlolaan 5, 7522 NB Enschede, The Netherlands
2
FOM University of Applied Sciences, Institute for Logistics and Service Management, Leimkugelstr. 6, 45141 Essen, Germany
Appl. Syst. Innov. 2018, 1(1), 5; https://doi.org/10.3390/asi1010005
Submission received: 11 December 2017
/
Revised: 19 January 2018
/
Accepted: 22 January 2018
/
Published: 24 January 2018
(This article belongs to the Special Issue Applications of Advanced Sensors on Applied System Innovation of IoT (Internet of Things))
Abstract
:Recent advances in the areas of Artificial Intelligence (AI) in the informatics field, Cyber-Physical Systems (CPS) in the production field, and Internet of Things (IoT) in the logistics and transportation field have induced a tremendous growth and innovation potential for global value chain setups. The question is not if further innovation and automation will happen but when—sooner than later—and how. Independent of physical production innovations (additive manufacturing) the information integration and decision autonomy tendencies themselves will drive new supply chain and customer interaction designs and business models. This article presents a technology forecast model based on extensive descriptions of developments by field as well as interaction traits. Results suggest that the crucial element in AI and technology application in logistics will be the human factor and human-artificial cooperation capacities and attitudes.
1. Introduction
Innovation advances in the areas of Cyber-Physical Systems (CPS) and Industry 4.0 in the production area [1,2,3,4,5], Physical Internet (PI) and Internet of Things (IoT) in the logistics and transportation area [6,7,8,9,10] as well as Artificial Intelligence (AI) in the informatics field [11,12,13,14,15,16] have brought about a tremendous growth and innovation potential for global value chain setups. The question is not if further innovation and automation will happen, but when—sooner than later—and in which specific way. Independent of physical production innovations (e.g., additive manufacturing) information integration and decision autonomy tendencies will drive new supply chain and customer interaction designs and business models.
But it is a core interest of research and business technology forecasting to identify important developments as early as possible as in this way adequate preparation (e.g., training, investment) can be secured. Therefore, as specific technologies and applications are not yet known, it is prudent and the only way forward to use existing descriptions and state-of-the-art technology concepts as basis for extrapolation methods.
This article presents a technology forecast result based on extensive descriptions of developments by field as well as interaction traits. Therefore, three intertwined research questions are pursued, namely
- RQ1: How can the status and state-of-the-art of development in the areas of production (CPS, additive manufacturing, Industry 4.0, etc.), transportation (PI, IoT) and artificial intelligence (AI) be described?
- RQ2: Applying the method of technology forecasting and evaluation, what looming innovations and prognoses can be derived from that?
- RQ3: What interactions and innovation potentials can be assumed bringing the three areas of production, transportation and artificial intelligence together?
To comply with these objectives, the contribution is structured as follows within the subsequent sections: Section 2 provides an extensive state of the art and literature analysis for the three sectors addressed (RQ1). Section 3 outlines the method of technology forecasting and evaluation and applies that to the three sectors discussed herein (RQ2). Section 4 brings together a brainstorming including the interactions and linkages between the three areas towards new innovation fields and concepts (RQ3). Section 5 describes the suggested innovations with the example of autonomous truck driving and maintenance. Section 6 concludes with an outlook.
2. State of the Art and Recent Advances
2.1. Production
Cyber-Physical Systems (CPS) have emerged along the connected Industry 4.0 concept in production as recent technological advances. CPS is characterized by the integration of information and data technologies as well as communication (“cyber”) with physical and real-world engineering processes and tasks, see e.g., [17,18]. Recent challenges include security questions [19,20,21,22,23] as well as complexity handling, including the notion to reduce complexity within the models used to simulate CPS systems [24].
The implications include many crucial industry and manufacturing as well as society infrastructure nodes and systems e.g., in the energy, health or communications sectors [25]. This also hints at the central role of interconnections and links between such sectors such as e.g., manufacturing and transportation, hitherto separated in the past.
Furthermore, CPS are usually designed as a network of interacting elements with physical input and output as well as digital input (and possibly output). This is closely tied robotics and sensor network innovations with intelligence mechanisms and computational intelligence or artificial intelligence such as e.g., neural network applications. Further developments will enable improvements in-between computational and physical elements by means of intelligent mechanisms, increasing their adaptability, autonomy, efficiency, functionality, resilience, safety, and usability. This in turn will enlarge the application potential of CPS in several domains (besides traditional manufacturing e.g., traffic control, firefighting, exploration and safety, energy appliances, healthcare). Applications of CPS largely adhere to sensor-based communication-enabled autonomous systems in different fields. Many wireless sensor networks for example monitor some aspect of the environment and relay the processed information to a central node. Other examples of CPS include smart energy grids, autonomous automotive systems for cars and trucks, medical monitoring in health care, process control systems in manufacturing, distributed robotics, and automatic pilot avionics in planes and helicopters.
A current challenge for innovation and development regarding CPS is the large difference in design thinking and practice between disciplines involved, e.g., software and mechanical engineering: A common language in terms of concepts and practice that is common to all involved disciplines is missing. Designing and deploying a CPS could for example be based on the 5C architecture (connection, conversion, cyber, cognition, configuration). In the connection domain, devices are designed to self-connect and self-sensing. Regarding conversion, data from self-connected devices and sensors are analyzing the status of critical issues with self-aware capabilities, machines can use the self-aware information to self-predict potential issues based on experience ore preset thresholds. In the cyber field, each active item is creating its own twin by using instrumented features and further characterize the machine health pattern—the established twin in the cyber space can perform self-compare for peer-to-peer performance for future enhancement. Regarding cognition, the outcomes of self-assessment and self-evaluation can be presented with an infographic meaning to show the content and context of potential issues. In the configuration level, an active item such as a machine or production system can be reconfigured based on risk criteria and priorities to achieve resilience and adaptability.
2.2. Transportation
Autonomous road driving for cars and trucks is on the verge of general application as e.g., Bernhart et al. [26], Hjälmdahl et al. [27] or Bertoncello and Wee [28] describe. This is connected to the fact that on the one hand an increased number of sensors are employed in vehicles (infrared, radar, laser, lidar, visual cameras etc.). On the other hand, former independent systems are connected and cooperating in order to perform self-sufficiency in driving. For example, the cruise control system was known for many years in trucks and cars, maintaining a constant pre-set speed for the vehicle. This is now coupled with further intelligent applications, e.g., with the GPS navigation and the automated gearbox, allowing vehicles to deploy dynamic cruise control. This is structured in three sub-level steps, today implemented in the trucking sector:
- In the first generation of cruise control applications, the system steadily maintained a constant, preset speed level. This was only steering the gas and propulsion system of the truck.
- Second, the system was able to follow a preceding vehicle with a present distance length with varying speed, therefore already combing the management of gas, automated gearshift and brake.
- Third is the competence of current dynamic cruise control systems to anticipate the route characteristics via GPS positioning in combination with map material. This allows the system e.g., to decelerate and upshift before downhill passages or accelerate and downshift before uphill road segments. This combines gas, brake, gearshift as well as GPS and navigation capabilities. The driver is furthermore only steering and supervising the comprehensive system.
This is a small but significant development on the pathway towards automated vehicle driving as described also for cars [29,30]. Finally, this will lead to automated road transportation with the existing truck driver playing only a supervisory role. A step in the middle is the truck platooning system, where trucks “hook up” for a specified part of the route (e.g., on motorways) and couple automatically such as a “train”; in this situation only the heading truck driver is obliged to steer and control, whereas the following drivers can rest or work in other capacities, only supervising the automated platooning systems in their trucks. The platooning concept also saves significant amounts of fuel due to reduced drag [31,32,33].
Altogether, the innovation speed is astounding in a long-term perspective: Whereas in 2004 none of 15 started autonomous vehicles made it through a simple 140 miles desert track in the DARPA Grand Challenge contest, already twelve years later in 2016 the first public road delivery by a beer trailer from the start-up company OTTO travelled 120 miles autonomously without major problems [34]. This lends to the hypothesis that the next 10-15 years will see major and widespread applications of autonomous trucking at least in some countries and with specific application areas, especially on long-haul distances.
2.3. Artificial Intelligence
Artificial Intelligence (AI) can be captured in short as ‘solving tasks like humans’. The concept is more than sixty years old as the term was coined at Dartmouth in 1956 by McCarthy and colleagues [35]. At that time, a new science field was envisioned for AI as “science and engineering of making intelligent machines.” (see [36,37], p. S37). But the core missions of making machines ‘understand, think, and learn in a similar way to human beings” was in the first four decades blocked by many technical hardware and software hindrances—the time was just not yet ripe and therefore many expectations and projects were huge disappointments (cp. [35], p. 410). But since about two decades, slow and increasing success is imminent in different fields, making it one of the most promising research fields today. For further analysis and connections towards logistics and supply chain management, it is informative to reconsider the literature distinction between ‘strong’ and ‘weak’ AI: Whereas strong AI should be able to solve a large number or even more tasks like human beings, weak AI is supposed to be able to solve one specific task similarly or better than humans, such as playing chess for example. As can be recognized from many applications already today, weak AI is a reality in our everyday lives when machines play chess, navigate cars, compose music or suggest shopping items as well as social contacts and places to go. Strong AI on the other hand is currently yet a vision for the future, recognizable roughly in major movies such as ‘Chappie’, ‘Automata’ or ‘Ex Machina’—where AI robots are capable of complex bundles of activities such as understanding language, speaking, recognizing other persons and devising plans of their own actions. This point of artificial intelligence reaching human intelligence levels is labelled ‘Artificial General Intelligence (AGI)’ or strong AI. The point in time where such AGI entities are reached is called “singularity” (see [38]). After this point, we might expect the entity featuring AGI to self-improve further (also called a ‘take-off’), reaching a state of ‘Artificial Super Intelligence’ (ASI). Such an ASI entity would be unfathomable and unpredictable to us humans—such we humans are utmost incomprehensible for an ant or a mouse.
Furthermore, it has to be recognized that ‘tasks’ in the nutshell definition usually involve a complex bundle of information, analysis, decision and activity processes. This is surely true for logistics processes such as for example order picking, route scheduling or truck driving. Therefore, usually AI innovations are happening in “jumps” and breakthroughs rather than as a continuous development—which makes predictions in this field very hard and sketchy (cp. [39,40,41]).
In order to outline the technological and innovation advance of AI, the following Table 1 is providing details regarding the capability development in human games.
As indicated in Figure 1, weak AI applications have been able to increasingly master single tasks or clearly restricted bundles of tasks such as playing chess or other accomplishments. This is indicated chronologically in Table 1 for some gaming examples–showing that beside the point that this list will ever grow longer and longer, the process can also be recognized to accelerate.
For the last line in this table taken from Bostrom ([14], pp. 12–13) we again recognize how hard future prognosis are in this field: Bostrom posits in 2014 that ‘Go’ as a very strategic and intuitive game may be mastered by AI on superhuman levels (meaning leaving human players no real chance as you may try with any free chess app on your smartphone already today) “in about a decade”; this would indicate about 2024. But in reality, this level was already reached when the AI program AlphaGo beat the human go world champion Lee Sedol in March 2016, [42,43]—eight years earlier than predicted just two years before. As can be seen from the text in Table 1, a typical human error led to this understated prognosis as AI development was perceived at a ’linear’ rate (“at a rate of about 1 dan/year in recent years”). In reality, the AI evolution takes on progressively—leading to a situation where already in 2017—one year later—the further improved AI instance Alpha Go Zero was able to teach itself the ability to beat the old AlphaGo system without human examples or help [13]. The same happened with the first chess AI from 1997—up to a state where today easy-to-use and free smartphone applications for chess leave no chance to even the best human players. Therefore, it would be prudent if we truly take this lesson to our hearts: Technology and especially AI development is advancing progressive, not linear; prognosis and expectations have to take that into account and avoid the ‘trap of linear extrapolation’. This can be connected to the innovation s-curve concept, indicating exponential and not linear innovation speed in many processes.
In general, nevertheless especially for business applications as for example in logistics, a series of expectations or expected advantages are connected to the development and implementation of AI applications in transportation, intralogistics and supply chain steering. These foreseen advantages of AI applications in production and transportation include:
- Cost savings: AI applications are expected to achieve cost savings, especially in the area of personnel costs as robotics and automated intralogistics and transportation applications are expected to provide faster and durable—and therefore finally cheaper—solutions in the logistics domain.
- Earnings increases: In many cases AI applications are expected also to increase revenue volumes—whether directly by increasing available product items at the point of sale (avoiding out of stock situations), or indirectly by allowing retailers to match customer preferences and expectations better and therefore increase customer satisfaction and re-buy rates. This is already partly obvious in the online shopping environment as well as with new automated customer support systems such as ‘Google Home/Assistant‘ or ‘Amazon Alexa/Echo’ [47,48].
- Increased speed: Obviously especially in logistics and transportation contexts, an area of great expectations is also the dimension of speed, especially by a more aligned cooperation of different actors within operations and transportation processes—e.g., between picking, production, packing and outbound transportation. This may significantly decrease lead times and time to market rates with the application of AI and automation.
- Increased flexibility: Finally, especially with speedy AI applications, most logistics and SCM managers also expect increasing flexibility for intralogistics as well as transportation setups; this is a very valuable asset in logistics environments and can be especially crucial in peak times. For example especially in delay and ‘troubleshooting’ situations very complex and fast decisions have to be taken e.g., for or against express transportation, re-shipments or others—in such situations, AI decision support could be crucial for maintaining customer satisfaction and competitiveness for logistics service providers as well as manufacturers and retailers.
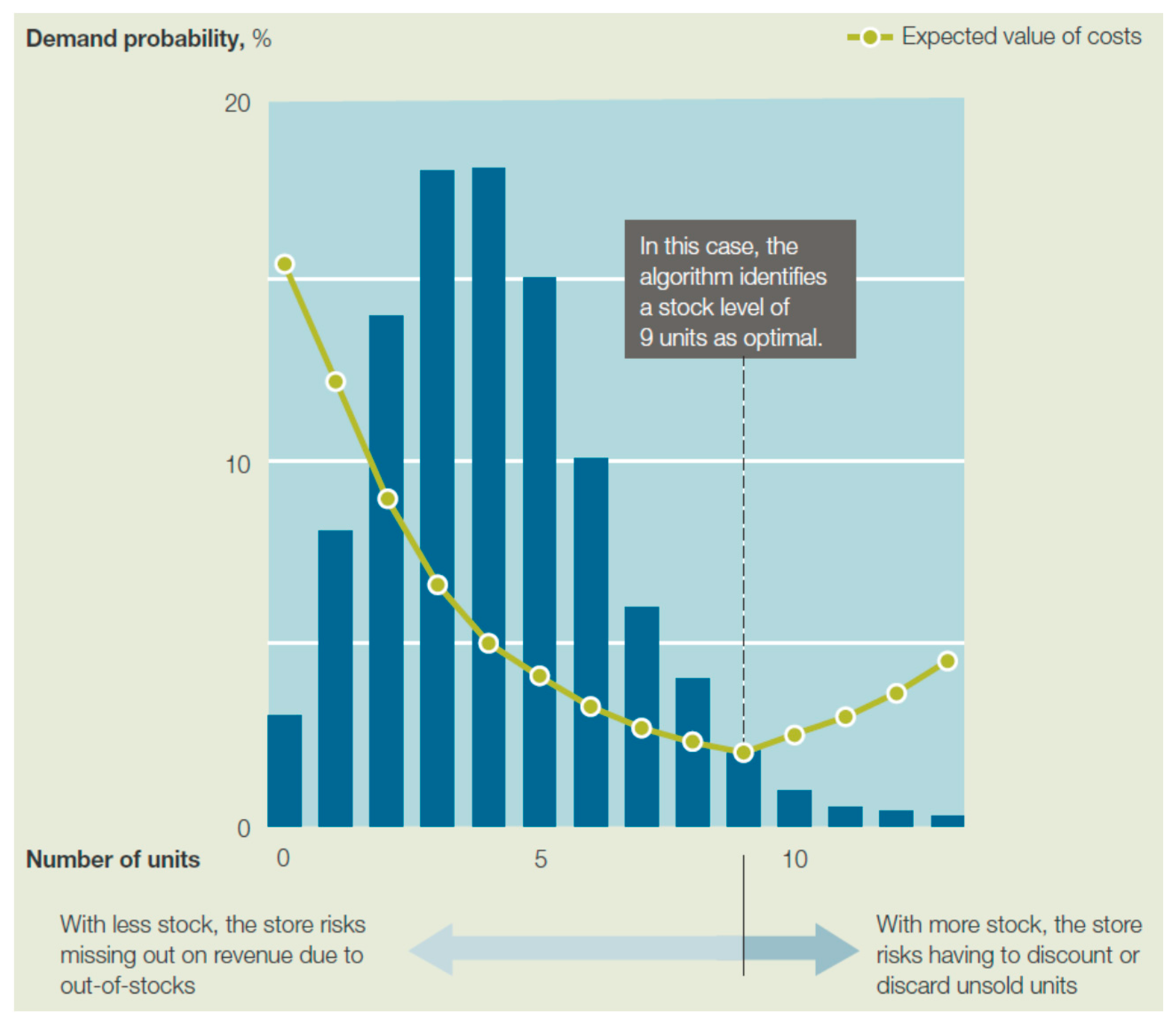
As an example for the expected cost savings as well as earnings increases by AI applications in supply chains, an example from the retail sector is provided by Glatzel et al. [49], in detail depicted in Figure 1. The AI application addressed the classical ‘out of stock’ problem and replenishment planning in retail and point of sale operations. By identifying the optimal solution regarding the specific replenishment lot size, the application is able to avoid lost earnings as well as too high cost levels for storage, transport as well as discarding unsellable items.
Altogether regarding RQ1 it can be stated that there are a multitude of technological advances in the outlined three areas of CPS, IoT and AI—but the advances are more or less still restricted to specific instances of application (CPS: specific manufacturing sites and applications; IoT: specific testbeds and company surroundings; AI: specific applications in games and e.g., picture and pattern recognition). Second, it is important to acknowledge that future inventions can be anticipated—their impacts on the contrary are not foreseeable as highlighted e.g., by Norman:
“In 1963, Dennis Gabor, Nobel laureate for his invention of the holograph, said ‘The future cannot be predicted, but futures can be invented’ (Gabor, 1963). This statement has become a mantra in recent times, attributed to many who are simply rephrasing Gabor. Alas, the slogan, wonderful though it may sound, is false. The most successful inventions transform the world in ways that are impossible to foresee at the time of the invention. The statement should really be yet another of my laws: My law of prediction: ‘The future cannot be predicted, not even by trying to invent it. Although inventions can change the future, their long-term impact cannot be predicted.’ So, invent all you like, just don’t try to predict the impact several decades later.”[50]
3. Technology Forecasting and Evaluation
3.1. Theory and Method Framework
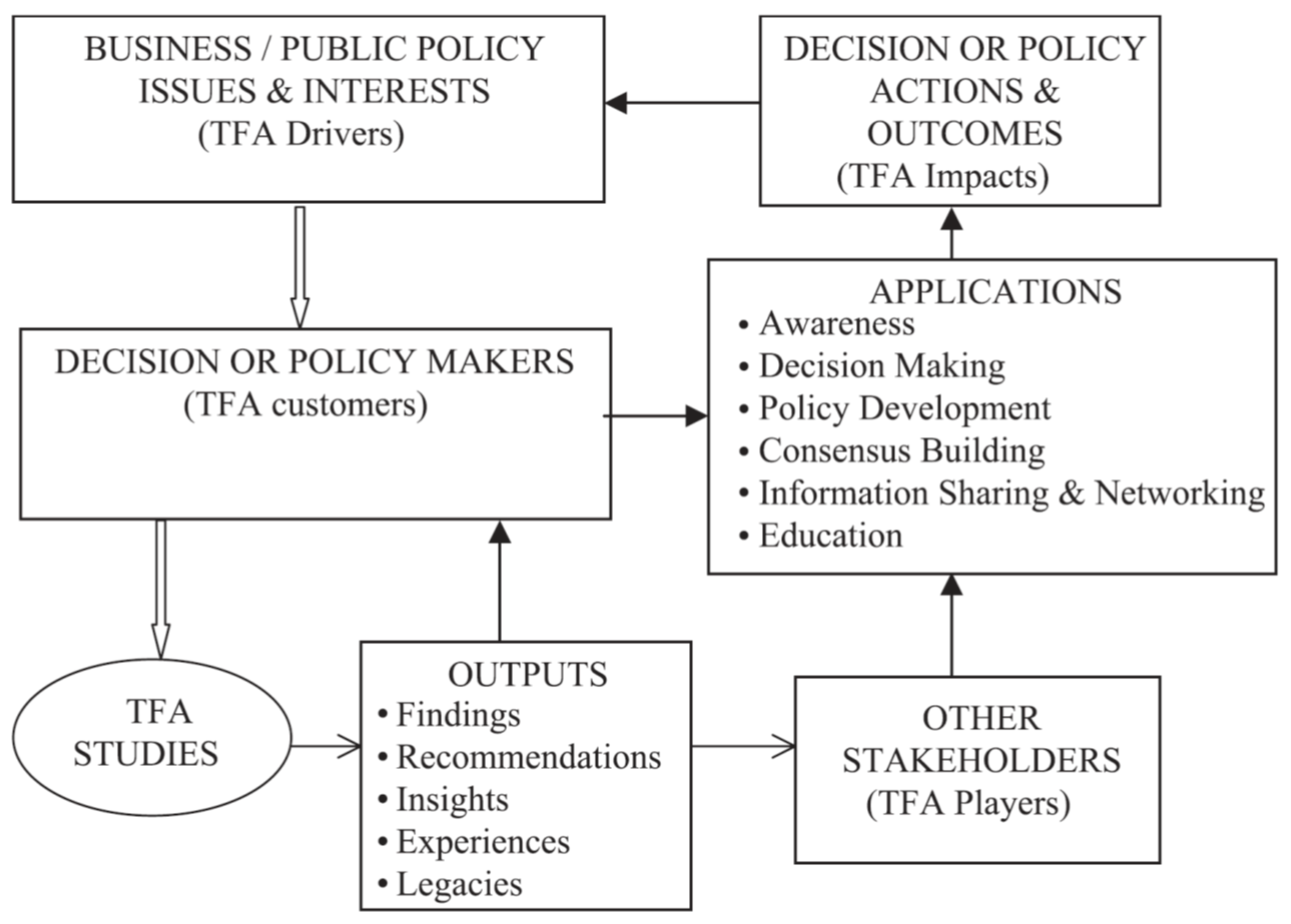
Technology forecasting and prognosis or technologies future analysis (TFA) are characterized by a fuzzy set of objectives, actors, processes and methods. This is depicted in the following Figure 2 with a theoretical TFA framework by Porter et al. [51].
In the field of technology forecasting and foresight a multitude of methods is applied in different settings and for different addressed questions. Among the methods applied, there are for example the following [51,52,53,54]:
- Delphi method (expert interviews);
- Analytical hierarchy process AHP (expert opinions/prioritization);
- Patent analysis;
- Bibliometric analysis;
- Relevance trees;
- Growth curve;
- Extrapolation;
- Case studies;
- Scenario writing.
For each methodology a short description is added in the following Table 2 in order to outline the specific advantages and disadvantages. This also motivated the selection of used methods for the question at hand and therefore is a crucial backdrop for the whole analysis.
For the technology development forecast interesting here regarding CPS, AI and IoT systems, the extrapolation as well as the later applied case study methods are selected due to the limited prognostic value of historic information regarding the development i.e., for the AI field (basis e.g., for bibliometric and patent analysis as well as the Delphi and AHP methods).
3.2. Application
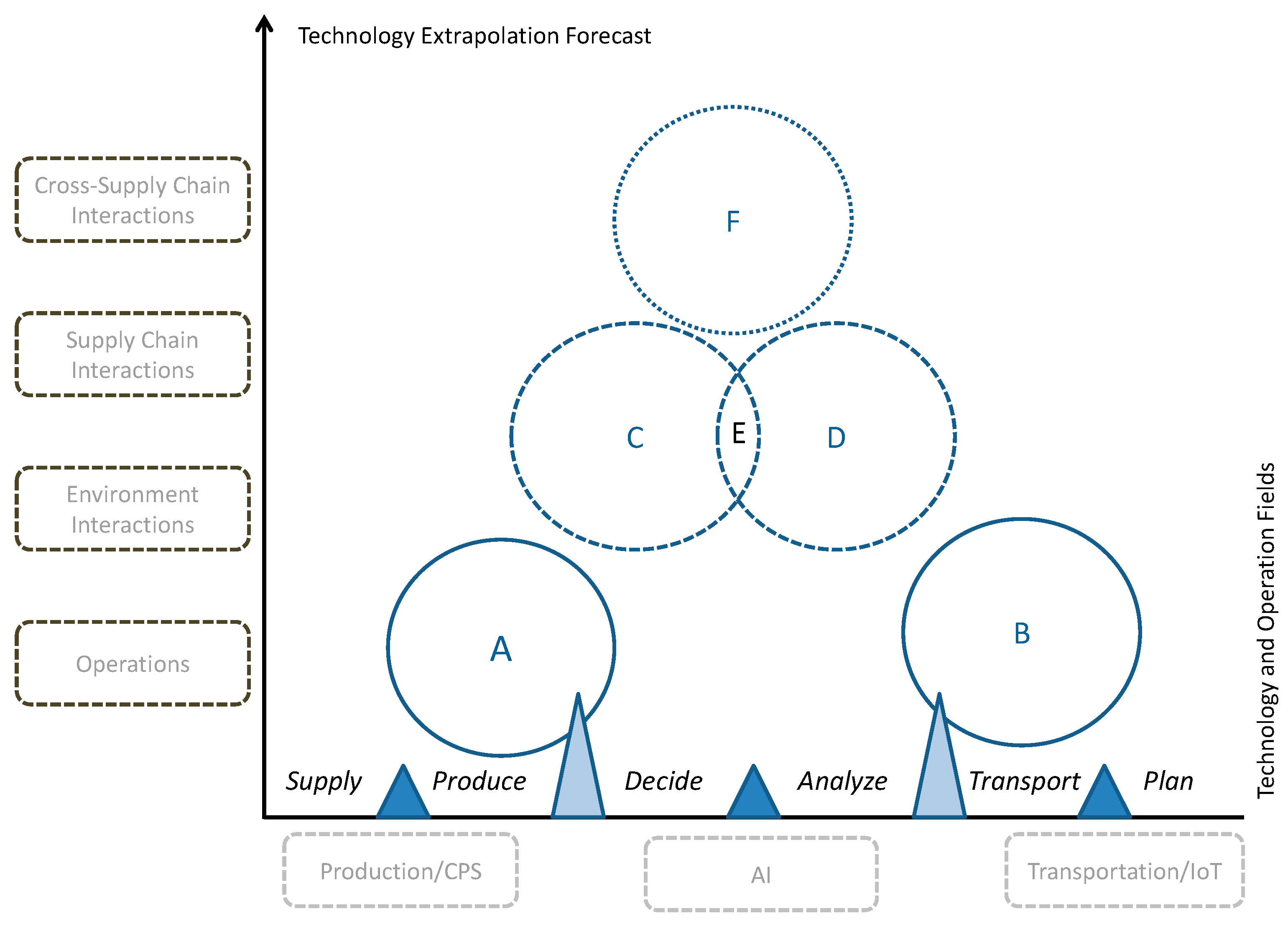
Within the following Figure 3, the extrapolation method is applied to the fields of APS, AI and IoT/Transportation, introduction the following elements: On the ‘x axis’ we find the three technological and operations areas of ‘Production/CPS’, ‘AI’, and ‘Transportation/IoT’. Also along the x axis we recognize triangle symbols for typical separators between different technology areas, be it organizational, regarding the mindset or the education and science discipline columns (e.g., informatics graduates or researchers working in the AI field but without preoccupation or knowledge in the production or transportation fields). These separators for example divide the production field into the typical ‘supply’ perspective (responsible for the availability of materials and service necessary for manufacturing) and the ‘production’ perspective. Further intra-production fields and separate views could for example also be ‘maintenance’ or ‘costumer order/services’. In a similar form, also separate fields exist in the AI (‘decide’ applications and questions; ‘analyze’ applications and questions) as well as the transportation areas (e.g., transport operations, blue collar; transport planning; white collar).
On the y axis we experience an extrapolation dimension denominating a merging development from ‘operations’ as separate fields and independent action fields such as historically production and transport towards ‘environmental interactions’ (e.g., the mentioned automated and dynamic cruise control systems taking into account terrain features in advance). This could proceed towards ‘supply chain interactions’ and last ‘cross-supply chain interactions’. The respective technology extrapolation fields A to F are explained in detail in the following section 4.
The data source for this extrapolation were the referenced sources in Section 2 as well as author experiences and cooperation with different logistics, supply and manufacturing firms in Germany.
4. Discussion of Innovation Fields
4.1. Field A—‘Advanced CPS’
Within Figure 3, the technology extrapolation field ‘A’ denominates an area of increasingly autonomous CPS systems in manufacturing and supply functions. Such systems would first overcome the internal field separations e.g., between manufacturing and supply processes, e.g., by coupling scheduling decisions on the availability of required material in the immediate vicinity of the manufacturing site–but also within an increasing ‘foresight radius’ e.g., within adjunct warehouses or neighboring manufacturing or material stations. This includes also an increasing use of AI applications in the CPS domain, e.g., with multi-objective decision support systems enhanced by machine learning. The obvious problem and challenge in this development phase will be to integrate, motivate and train the human co-workers in the manufacturing domain as the decisions and actions of such advanced CPS systems will not be transparent and understandable to human workers. For example, workers might have to trust the CPS system deciding to start a production run without the obvious availability of all required raw materials in the immediate vicinity of the manufacturing site–but the CPS system might plan with material SKUs outside the immediate view or reach of the manufacturing workers (cp. [55,56]).
4.2. Field B—‘Advanced Transportation Planning’
In a similar development, for the transportation and IoT domain, increasingly autonomous action may be implemented by advanced IoT and transportation planning systems: An example may be the advanced internet shared services platform for warehousing the international logistics service provider ‘Imperial’ from South Africa is rolling out in Europe [57]. In this case, open warehouse facilities are automatically offered and matched with specific warehousing demand. Also, execution and added services such as insurance are also partly automated. In such advanced systems, existing segmentation e.g., between planning and execution as formerly white- and blue-collar work areas will be overcome and analytical capacities of AI instances will be included. So for example traditional freight forwarding and transportation platforms will be more automated, executing search and matching operations with AI help automatically to the point where the individual operators such as small trucking businesses will have nothing to do than to operate their trucks according to the communications of such platform applications, without their own searching, sales or contract negotiation operations and employees (see e.g., [58]).
4.3. Field C—‘Expert/AI CPS’
In a further development step according to this technology extrapolation, AI and machine learning will be embedded so deeply into CPS and manufacturing processes that automation is reaching new, supply chain levels: In this case, automated systems will align supply chain operations along a specific product value chain, e.g., match manufacturing and sourcing capacities across several steps in the value chain process, also across different locations and countries (cp. [59,60]). This requires a high level of standardization internationally but will also free enormous efficiency potential–for example such Expert/AI CPS systems might decide to increase the production of one supply location in China in order to optimize the manufacturing schedule for a plant in the USA—though the Chinese location is not directly delivering to the US location but through intermediate production steps in locations in Germany and Tunisia. Such global setting are standard today—but require a huge amount of human work in coordinating manufacturing capacities, lot size decisions and shipping orders and executions. This might change rapidly with AI implementation—to a point where white-collar manufacturing planning and supply chain management design activities are reduced to a minimum with only sparsely occurring troubleshooting caused by interruptions.
4.4. Field D—‘Expert/AI Transportation Systems’
Analogously, for expert/AI transportation systems the integration of AI applications will enable new functions hitherto unthinkable: Large fleets of vehicles e.g., in airport ground operations, large manufacturing and warehousing sites or even cities will autonomously steer and optimize their route and speed [61,62]. Such transportation systems will also actively interact with manufacturing tasks, e.g., speeding up or slowing down vehicles (trucks, trains, ships) when the manufacturing schedule demands faster or slower delivery of materials to production nodes. Supporting structures such as maintenance within the transportation system will be fully automated, e.g., planes, ships, trains and trucks will automatically demand maintenance stops and materials as well as service support. Similarly, insurance and bookkeeping will be fully automated in transportation, leading to a scenario that especially white-collar jobs in this sector are significantly reduced–and partly taken over by driving personnel who have free capacities only supervising autonomous driving systems.
4.5. Field E—‘Integrated SCM Sytems’
The technologies and systems described with the fields ‘C’ and ‘D’ will also increasingly start to merge. Such ‘integrated SCM systems’ will be characterized by the real-time analysis, simulation and decision from both sides, manufacturing and transportation/warehousing perspectives. This will enable a new level of supply chain optimization where for example marginal cost information for required warehousing or transportation capacities will be taken into account together with the marginal cost rates and technology situation in manufacturing (cp. [63,64]). Therefore, new decisions might emerge where for example scheduling decisions in manufacturing are based on high warehousing costs of specific raw materials (prioritizing the production schedule for those products with higher cost-levels in warehousing their specific raw materials). Also, in another scenario, production schedules might dynamically change due to rising transportation prices for specific raw materials. Therefore, a new total cost and quality (as well as possibly sustainability, [65]) perspective throughout the whole supply chain will be possible by applying such integrated SCM systems with the help of AI analysis and decision.
4.6. Field F—‘Global Meta-SCM Systems’
Finally, field ‘E’ denominates an area of cross-supply chain integration. This entails the notion that already discussed information gaps and improvement potentials (see e.g., [66]) are by far exceeded by inter-value chain optimization potentials. If an integrated meta-SCM system with AI capability could analyze and optimize several supply chain situations together, in the case of material shortages within one value chain hindering efficient production existing stored volumes of this specific material in a completely different value chain for another product might be used. This is also true for today competing supply chains, where often troubleshooting and very expensive express transportation is required due to missing parts within one OEM—but the missed parts are available with a nearby competing OEM e.g., in the automotive industry. Such situations could be detected and exploited by global AI systems optimizing manufacturing and transport with insights and data transparency across different value chains and industry sectors.
5. Case Analysis Autonomous Truck Driving and Maintenance
5.1. Theory Framework
It is interesting to compare the development of autonomous (road) driving with existing technologies and concepts in other areas of transportation: Within the airline as well as rail and shipping industries, partly automated and autonomous piloting is a long-standing and accepted situation (see e.g., [67,68]). Therefore, it is astounding that current expectations regarding autonomous driving within road transportation and trucking are on the one hand met with many reservations and on the other hand extreme job losses are feared—in spite of the fact that in the airline, railway or shipping business such job losses have never been happened.
5.2. Description Status Quo
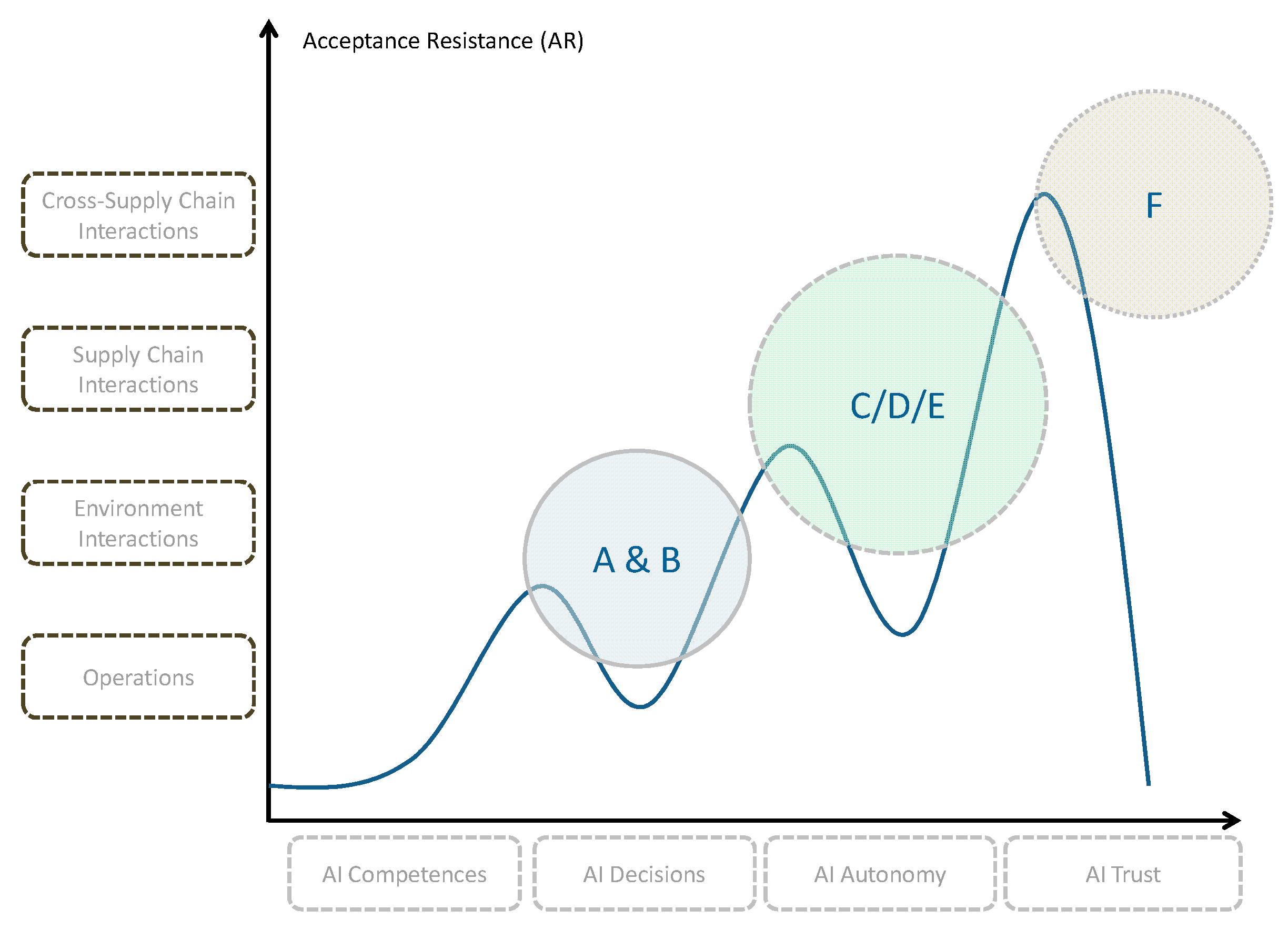
According to many regulatory demands and authorities, a human person will be on board due to security reasons at least in public traffic environments for the near future. This allows for the observation, that in the future humans will not be employed for their ‘know-how’ but their ‘know-why’. The competence to actively gear and steer e.g., the truck will be implemented by a technology application—whereas the driver is supposed to understand the know-why of all systems and especially when to interrupt the automated system (therefore also: ‘know-when’). Human interaction towards AI applications and automation as human-computer interaction (HCI, see [69,70,71,72,73]) can be characterized by three hurdles or areas of resistance. Once an area is overcome, acceptance may settle in. This is depicted in the following Figure 4.
The three signified hurdle areas are connected to three increasing AI functional areas and induce also an increasing level of resistance throughout this development in line with an increasing level of personal intrusion (PI, x-axis): AI Competences: Automation and AI applications are increasingly acquiring competences in specified fields (compare Table 1), from playing chess or poker to forecasting market demand in value chains. As separate competences, these are new for humans to get accustomed to but are comparatively less frightening and therefore the resistance level towards them is relatively low. For logistics, this may include for example the automated gearbox in truck driving, automated routing and navigation systems as well as automated intralogistics applications systems such as picking and warehouse transportation systems.
These systems have in common that usually any final decision e.g., regarding the travelled street in reality are still taken by humans—and in many cases as a lot of people know personally the AI suggestions for example from navigation systems are not followed through by humans, an obvious sign of resistance. AI Decisions: Further, AI applications are suggesting and applying single decisions, which usually rises greater anxiety and resistance levels with humans. This happens for example in cruise control applications in cars and trucks–with three development distinctions: maintaining constant speed, maintaining constant distance to front-vehicle and finally variation of speed according to anticipated terrain features. In such cases, the automated device is taking a single or a row of decisions within a limited area of action (e.g., vehicle speed, vehicle gear). Such developments have already happened in the past for example for car and truck motor management (increasingly automated) or also in the leisure area for smartphone and social media applications. In these cases, humans are accepting automated applications without any security or fraud mistrust, at least not on a day-to-day basis (only incident-based e.g., with data fraud scandals or leaks).
Understandably, this sort of AI application is usually also raising higher levels of rejection among humans, requiring a longer period of adaption before acceptance can settle in (e.g., [74]). AI Autonomy: Finally, AI applications are taking a multitude of differentiated decisions, leading to autonomous behavior as e.g., in actively steering cars and trucks for longer periods and with interaction towards other participants in road traffic. In these cases, humans usually take over a passive controlling role (supervision; [75]). These applications are at the doorstep to industrial and real-world application, in production (autonomously moving robots with human interaction), traffic (autonomous cars and trucks) as well as health care (surgery as well as care robotics). These levels or hurdles can be seen throughout a sequential level of personal intrusion (x-axis), arriving at a completely new situation after the three hurdle areas: The situation of trust towards an AI application, where humans are inclined to actively and trustfully cooperate with automated applications (compare e.g., [76,77,78,79,80]).
5.3. Technology Forecasting
The following Figure 5 is finally combining the technology extrapolation exercise (Figure 3) and the outlined case for autonomous driving (Figure 4).
The outlined development in Figure 5 provides a general but instructive scheme for the future of AI applications in CPS and IoT environments: Extrapolation fields ‘A’ and ‘B’ as described in Section 4 are characterized by the AI decisions profile—human users will have to adapt to the existence and superiority of AI decisions in order to work efficiency in such manufacturing and transportation environments (compare e.g., [56,81]). In this area e.g., with cruise control applications in truck driving as described above, the resistance level may be on a medium level. It will also be necessary to train the drivers using such cruise control systems (level 3 with GPS application) in order for them to be able to understand the system. This is mainly directed at their necessary competence to recognize failures in the system and possible dangers from the AI application. This could for example be the fact that lower gears are used for braking effects on downhill sections—an AI application may shift up in order to save fuel.
Regarding the extrapolation fields of ‘C’, ‘D’, and ‘E’, it is important to recognize that a double challenge awaits for the construction and implementation of such systems: On the one hand, different actors in supply chains such as manufacturers, suppliers, logistics service providers and transportation operators along with other adjunct service providers (IT, insurance, finance) have to be integrated with their data and decisions into such systems—requiring a high level or corporate trust and standards in terms of information exchange. On the other hand, all users and cooperating personnel will have to accept and embrace AI autonomy on a full day-to-day scale. This may be hard to learn as many operative decisions such as e.g., order lot sizes will have to be accepted which are not understandable to the relevant personnel, not even on a management level. But still, having mastered those two challenges, the cooperating personnel such as truck drivers as well as managers in the supply chain oversight role will have to acquire a ‘know-why’—competence regarding the AI systems in place in order to recognize when something is wrong, when security and management overrides could become necessary. Therefore, it will be a completely new game for management research and education to employ routines and signals for these operating personnel to rely on with this important task. Acceptance and even trust of drivers towards such automated systems will therefore play an important role for the competitiveness of road transportation companies from several perspectives: First, if the driver allows the AI application to do its job, it may be more efficient and cost saving than the human driver (saving fuel, reduced travelled distance, and reduced truck wear). Second, as drivers may assume further company tasks and processes instead of driving while travelling, this may save costs at other places (e.g., administrative personnel). Third, driving personnel may also be more effective and efficient due to a motivation boost within an AI application scenario.
Finally, looking at the extrapolation field ‘F’ with the two-sided requirements of enabling and applying cross-supply chain decisions as well as a full scale of ‘AI trust’, the gap towards existing technologies as well as competences of human personnel regarding cooperation with such a system become obvious: For autonomous truck driving, driver personnel would have to anticipate and accept that CPS and IoT systems merge with the support of AI applications; this implied that e.g., transportation routing will change on a last-minute basis, depending on global-scale environments regarding prices, material availabilities and manufacturing scheduling. This in turn will face severe challenges not only in human acceptance but also in physical constraints such as driver working times and location or return bases. In such a setup, also the required trust is absolute in the sense that no single human will be able to ever anticipate, understand and fully control the actions of such an autonomous system, spanning several supply chains in a meta-perspective. Therefore, it would for example be a good idea to incorporate specific check-up breaks into the system where teams of experts are installed to thoroughly analyze and secure the system; because during the running operations in supply chain manufacturing and transportation a real-time checking will not be feasible for humans. Therefore, this will be in a way akin to formula 1 racing, where the pilots racing on the track have to trust the technology in the car fully, whereas the pit stops are a highly advanced technology-based team effort to check and service the technology for further race laps. Similar routines will possibly be necessary for such fully integrated global AI CPS systems as outlined here.
6. Conclusions and Outlook
The contribution has shown the state of the art in the areas of CPS, IoT and AI in order to hint towards the upcoming trends and innovation possibilities, especially in the linkage and interconnection areas. It was shown that crucial success factors might be adaptive and change management-oriented concepts of human-computer interaction as well as the development and implementation of security concepts in order to prevent resistance and accidental security leaks significantly diminishing the performance and efficiency of future AI-enhanced CPS and IoT systems.
For a final outlook towards the impact of especially future AI developments [82,83,84,85,86,87,88,89] in the supply chain and business domain a metaphor might be adapted: Bostrom started his 2014 book about superintelligence—hence AI—with a fable of sparrows looking out for an owl, symbolizing humans on the verge of developing AI instances (see [14], p. v). However, this unfinished fable lacks three important features: First, sparrows and owls are–though quite different–still both quite similar bird species. In reality, we have to expect a new AI or superintelligence to be much more different from humans and how we ourselves think. Second, the image of an owl for a AI instance may obscure the distributed nature such an instance may have within the depths of the internet–quite probably it will lack the physical nature of any species to compare to, instead being in a true sense “global” and maybe soon also interplanetary as it may only have to rely on communications and electronics, devoid from biological constraints we humans face. And third, it is hard to believe that there will be only one AI instance—and that we recognize it as such as we see it. It would be more prudent to expect a herd or family of AI instances. Also, it might be too narrow—minded that we humans really develop or “discover” an AI as in the ant fable—it might me an alternate and more probable way to expect the AI to find us (much in the way that we expect outer space aliens more to find us than vice versa, at least if we assume them to be technologically more knowledgeable. We may be in for a surprise as we might only recognize it in hindsight–possibly something is already there in the internet domain ….
An alternative fable—though surely also with embedded constraints—might be a similar search of ants (humans) on the lookout for a strong ‘helping hand’. Moreover, they might end up with elephants (AI), a very different species from themselves. As with another known fable different ants may encounter different parts of an elephant and recognize it for something distributed and not connected (the legs, the ears, the trunk). This is connected to the fact that for an ant, an elephant might be of ‘incomprehensible’ size. Still, the elephant might be of help to an ant society–but at the same time it is hard to imagine how the ants “teach” an elephant how to work for them, how to interact and cooperate. Even harder is the notion to expect the ants to control the actions and impacts of elephants. However, that is exactly the question we face with a real self-motivated and independent AI or superintelligence in the future. Applied to the logistics and supply chain management domain this implies that it could be wise to keep specific areas separated and not connected to each other and the internet in order to prevent too much damage applied by the first ‘elephants’ to emerge. Until proper control options are explored, it would be wise and sound to establish ‘Chinese walls’ and decoupling points to separate specific areas in supply chains and transportation–alas not to explore all possible potentials in the merging of different sectors yet, especially with the notion that we might discover and recognize one or several first AGI instances only sometime after the fact of genesis [90]. In this case, the human trait of anxiousness should keep the upper hand over the also very human trait of curiosity, at least in some elementary arenas of global supply chains and their essential interlinks as our physical survival depends on them.
Conflicts of Interest
The author declares no conflict of interest.
References
- Mikusz, M. Towards an Understanding of Cyber-Physical Systems as Industrial Software-Product-Service Systems. Procedia CIRP 2014, 16, 385–389. [Google Scholar] [CrossRef]
- Zhang, J.; Ding, G.; Zou, Y.; Qin, S.; Fu, S. Review of job shop scheduling research and its new perspectives under Industry 4.0. J. Intell. Manuf. 2017, 1–22. [Google Scholar] [CrossRef]
- Riedl, M.; Zipper, H.; Meier, M.; Diedrich, C. Cyber-physical systems alter automation architectures. Annu. Rev. Control 2014, 38, 123–133. [Google Scholar] [CrossRef]
- Bordel, B.; Alcarria, R.; Robles, T.; Martin, D. Cyber-physical systems: Extending pervasive sensing from control theory to the Internet of Things. Pervasive Mob. Comput. 2017, 40, 156–184. [Google Scholar] [CrossRef]
- Frazzon, E.M.; Hartmann, J.; Makuschewitz, T.; Scholz-Reiter, B. Towards Socio-Cyber-Physical Systems in Production Networks. Procedia CIRP 2013, 7, 49–54. [Google Scholar] [CrossRef]
- Meech, J.; Parreira, J. An interactive simulation model of human drivers to study autonomous haulage trucks. Procedia Comput. Sci. 2011, 6, 118–123. [Google Scholar] [CrossRef]
- Merat, N.; de Waard, N. Human factors implications of vehicle automation: Current understanding and future directions. Trans. Res. Part F Traffic Psychol. Behav. 2014, 27, 193–195. [Google Scholar] [CrossRef]
- Montreuil, B. Towards a Physical Internet: Meeting the Global Logistics Sustainability Grand Challenge. Logist. Res. 2011, 3, 71–87. [Google Scholar] [CrossRef]
- Gunsekaran, A.; Ngai, E.W.T. Expert systems and artificial intelligence in the 21st century logistics and supply chain management. Expert Syst. Appl. 2014, 41, 1–4. [Google Scholar] [CrossRef]
- Zhang, S.; Lee, C.K.M.; Chan, H.K.; Choy, K.L.; Zhang, W. Swarm intelligence applied in green logistics: A literature review. Eng. Appl. Artif. Intell. 2014, 37, 154–169. [Google Scholar] [CrossRef]
- Klumpp, M. Automation and Artificial Intelligence in Business Logistics Systems: Human Reactions and Collaboration Requirements. Int. J. Logist. 2017, 1–19. [Google Scholar] [CrossRef]
- Armstrong, S.; Bostrom, N.; Shulman, C. Racing to the precipice: A model of artificial intelligence development. AI Soc. 2016, 31, 201–206. [Google Scholar] [CrossRef]
- Silver, D.; Schrittwieser, J.; Smionyan, K.; Antonoglou, I.; Huang, A.; Guez, A.; Hubert, T.; Baker, L.; Lai, M.; Bolton, A.; et al. Mastering the game of Go without human knowledge. Nature 2017, 550, 354–359. [Google Scholar] [CrossRef] [PubMed]
- Bostrom, N. Superintelligence—Paths, Dangers, Strategies; Oxford University Press: Oxford, UK, 2014. [Google Scholar]
- Kosir, A.; Strle, G. Emotion Elicitation in a Socially Intelligent Service: The Typing Tutor. Computers 2017, 6, 14. [Google Scholar] [CrossRef]
- Klumpp, M. Artificial Divide: The New Challenge of Human-Artificial Performance in Logistics. In Innovative Produkte und Dienstleistungen in der Mobilität; Proff, H., Fojcik, T.M., Eds.; Springer Gabler: Heidelberg/Berlin, Germany, 2017; pp. 583–593. [Google Scholar]
- Müller, C.; Grunewald, M.; Spengler, T.S. Redundant configuration of automated flow lines based on “Industry 4.0”-technologies. J. Bus. Econ. 2017, 87, 877–898. [Google Scholar] [CrossRef]
- Liu, X.F.; Shahriar, M.K.; Al Sunny, S.M.N.; Leu, M.C.; Hu, L. Cyber-physical manufacturing cloud: Architecture, virtualization, communication, and testbed. J. Manuf. Syst. 2017, 43, 352–364. [Google Scholar] [CrossRef]
- Shames, I.; Farokhi, F.; Summers, T.H. Security analysis of cyber-physical systems using H2 norm. IET Control Theory Appl. 2017. [Google Scholar] [CrossRef]
- Shoukry, Y.; Nuzzo, P.; Puggelli, A.; Sangiovanni-Vincentelli, A.L.; Seshia, S.A.; Tabuada, P. Secure state estimation for cyber physical systems under sensor attacks: A satisfiability modulo theory approach. IEEE Trans. Autom. Control 2017, 62, 4917–4932. [Google Scholar] [CrossRef]
- Babiceanu, R.F.; Seker, R. Trustworthiness requirements for manufacturing cyber-physical systems. Procedia Manuf. 2017, 11, 973–981. [Google Scholar] [CrossRef]
- Abdo, H.; Kaouk, M.; Flaus, J.-M.; Masse, F. A safety/security risk analysis approach of Industrial Control Systems: A cyber bowtie—Combining new version of attack tree with bowtie analysis. Comput. Secur. 2018, 72, 175–195. [Google Scholar] [CrossRef]
- Alcaraz, C.; Lopez, J.; Choo, K.-K.R. Resilient interconnection in cyber-physical control systems. Comput. Secur. 2017, 71, 2–14. [Google Scholar] [CrossRef]
- Akkaya, I.; Derler, P.; Emoto, S.; Lee, E.A. Systems engineering for cyber-physical systems using aspects. Proc. IEEE 2016, 104, 997–1012. [Google Scholar] [CrossRef]
- Zanero, S. Cyber-Physical Systems. Computer 2017, 50, 15–16. [Google Scholar] [CrossRef]
- Bernhart, W.; Winterhoff, M.; Hoyes, C.; Chivukuly, V.; Garrelfs, J.; Jung, S.; Galander, S. Autonomous Driving; Roland Berger: Munich, Germany, 2014. [Google Scholar]
- Hjälmdahl, M.; Krupenia, S.; Thorslund, B. Driver behaviour and driver experience of partial and fully automated truck platooning—A simulator study. Eur. Transp. Res. Rev. 2017, 9, 8. [Google Scholar] [CrossRef]
- Bertoncello, M.; Wee, D. Ten Ways Autonomous Driving Could Redefine the Automotive World; McKinsey & Company: New York, NY, USA, 2015. [Google Scholar]
- Tylor, P. Data Mining for Vehicle Telemetry. Appl. Artif. Intell. 2016, 30, 233–256. [Google Scholar] [CrossRef]
- Fors, C.; Kircher, K.; Ahlström, C. Interface design of eco-driving support systems—Truck drivers’ preferences and behavioural compliance. Trans. Res. Part C 2015, 58, 706–720. [Google Scholar] [CrossRef]
- Sugimachi, T.; Fukao, T.; Suzuki, Y.; Kawashima, H. Development of Autonomous Platooning System for Heavy-duty Trucks. In Proceedings of the 7th IFAC Symposium on Advances in Automotive Control, Tokyo, Japan, 4–6 September 2013; Volume 46, pp. 52–57. [Google Scholar]
- Zhang, B.; Wilschut, E.S.; Willemsen, D.M.C.; Alkim, T.; Martens, M.H. The Effect of See-Through Truck on Driver Monitoring Patterns and Responses to Critical Events in Truck Platooning. In Advances in Human Aspects of Transportation, Proceedings of the International Conference on Applied Human Factors and Ergonomics, Los Angeles, CA, USA, 17–21 July 2017; Advances in Intelligent Systems and Computing; Stanton, N., Ed.; Springer: Cham, UK, 2018; Volume 597, pp. 842–852. [Google Scholar]
- Bishop, R.; Bevly, D.; Humphreys, L.; Boyd, S.; Murray, D. Evaluation and Testing of Driver-Assistive Truck Platooning—Phase 2 Final Results. Trans. Res. Rec. 2017, 2615. [Google Scholar] [CrossRef]
- Price, D.A. Robots for the long haul. Econ Focus 2017, 1, 13–15. [Google Scholar]
- Pan, Y. Heading toward Artificial Intelligence 2.0. Engineering 2016, 2, 409–413. [Google Scholar] [CrossRef]
- Norman, D. Design, Business Models, and Human-Technology Teamwork. Res.-Technol. Manag. 2017, 60, 26–30. [Google Scholar] [CrossRef]
- Hamet, P.; Tremblay, J. Artificial intelligence in medicine. Metabolism 2017, 69, S36–S40. [Google Scholar] [CrossRef] [PubMed]
- Hanson, R. Economics of the Singularity. IEEE Spectr. 2008, 45, 45–50. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Armstrong, S. Smarter than Us—The Rise of Machine Intelligence; MIRI: Berkeley, CA, USA, 2014. [Google Scholar]
- Barrat, J. Our Final Invention—Artificial Intelligence and the End of the Human Era; Griffin: New York, NY, USA, 2013. [Google Scholar]
- Silver, D.; Huang, A.; Maddison, C.J.; Guez, A.; Sifre, L.; van den Driessche, G. Mastering the game of Go with deep neural networks and tree search. Nature 2016, 529, 484–489. [Google Scholar] [CrossRef] [PubMed]
- Borowiec, S. AlphaGo Seals 4-1 Victory Over Go Grandmaster Lee Sedol. Available online: https://www.theguardian.com/technology/2016/mar/15/googles-alphago-seals-4-1-victory-over-grandmaster-lee-sedol (accessed on 30 October 2017).
- Stajic, J. Artificial intelligence masters poker. Science 2017, 356, 497. [Google Scholar] [CrossRef] [PubMed]
- Moravčík, M.; Schmid, M.; Burch, N.; Lisý, V.; Morrill, D.; Bard, N.; Davis, T.; Waugh, K.; Johanson, M.; Bowling, M. DeepStack: Expert-Level Artificial Intelligence in No-Limit Poker. Science 2017, 356, 508–513. [Google Scholar] [CrossRef] [PubMed]
- Riley, T. Artificial intelligence goes deep to beat humans at poker. Science 2017. [Google Scholar] [CrossRef]
- Clauser, G. Wirecutter—What Is Alexa? Available online: https://thewirecutter.com/reviews/what-is-alexa-what-is-the-amazon-echo-and-should-you-get-one/ (accessed on 30 October 2017).
- Smart Home—7 Things Amazon Echo Can Do That Google Home Can’t. Available online: https://www.cnet.com/how-to/amazon-echo-things-alexa-can-do-that-google-home-cant (accessed on 30 October 2017).
- Glatzel, C.; Hopkins, M.; Lange, T.; Weiss, U. The Secret to Smarter Fresh-Food Replenishment? Machine Learning. Perspectives on Retail and Consumer Goods, 5/McKinsey Report. 2016. Available online: http://www.mckinsey.com/industries/retail/our-insights/the-secret-to-smarter-fresh-food-replenishment-machine-learning (accessed on 30 October 2017).
- Norman, D. Designing for People. Available online: http://www.jnd.org (accessed on 30 October 2017).
- Porter, A.L.; Ashton, B.; Clar, G.; Coates, J.F.; Cuhls, K.; Cunningham, S.W.; Ducatel, K.; van der Duin, P.; Georghiou, L.; Gordon, T.; et al. Technology futures analysis: Towards integration of the field and new methods. Technol. Forecast. Soc. Chang. 2004, 71, 287–303. [Google Scholar]
- Eto, H. The suitability of technology forecasting/foresight methods for decision systems and strategy—A Japanese view. Technol. Forecast. Soc. Chang. 2003, 70, 231–249. [Google Scholar] [CrossRef]
- Cheng, A.-C.; Chen, C.-J.; Chen, C.-Y. A fuzzy multiple criteria comparison of technology forecasting methods for predicting the new materials development. Technol. Forecast. Soc. Chang. 2008, 75, 131–141. [Google Scholar] [CrossRef]
- Daim, T.U.; Rueda, G.; Martin, H.; Gerdsri, P. Forecasting emerging technologies—Use of bibliometrics and patent analysis. Technol. Forecast. Soc. Chang. 2006, 73, 981–1012. [Google Scholar] [CrossRef]
- Canbolat, Y.B.; Gupta, G.; Matera, S.; Chelst, K. Analysing risk in sourcing design and manufacture of components and sub-systems to emerging markets. Int. J. Prod. Res. 2008, 46, 5145–5164. [Google Scholar] [CrossRef]
- Liu, C.; Cao, S.; Tse, W.; Xu, X. Augmented Reality-assisted Intelligent Window for Cyber-Physical Machine Tools. J. Manuf. Syst. 2017, 44, 280–286. [Google Scholar] [CrossRef]
- Imperial Logistics International. Available online: https://www.imperial-international.com (accessed on 30 October 2017).
- Han, J.H.; Wang, Y.; Naim, M. Reconceptualization of information technology flexibility for supply chain management: An empirical study. Int. J. Prod. Econ. 2017, 187, 196–215. [Google Scholar] [CrossRef]
- Huang, S.H.; Sheroan, S.K.; Keskar, H. Computer-assisted supply chain configuration based on supply chain operations reference (SCOR) model. Comput. Ind. Eng. 2005, 48, 377–394. [Google Scholar] [CrossRef]
- Mori, M.; Kobayashi, R.; Samejima, M.; Komoda, N. Risk-cost optimization for procurement planning in multi-tier supply chain by Pareto Local Search with relaxed acceptance criterion. Eur. J. Oper. Res. 2017, 261, 88–96. [Google Scholar] [CrossRef]
- Bijjahalli, S.; Ramasamy, S.; Sabatini, R. A Novel Vehicle-Based GNSS Integrity Augmentation System for Autonomous Airport Surface Operations. J. Intell. Robot. Syst. 2017, 87, 379–403. [Google Scholar] [CrossRef]
- Ding, K.; Jiang, P.; Su, S. RFID-enabled social manufacturing system for inter-enterprise monitoring and dispatching of integrated production and transportation tasks. Robot. Comput.-Integr. Manuf. 2018, 49, 120–133. [Google Scholar] [CrossRef]
- Zijm, W.M.H.; Klumpp, M. Logistics and supply chain management: Trends and developments. In Logistics and Supply Chain Innovation; Zijm, W.H.M., Klumpp, M., Clausen, U., ten Hompel, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1–20. [Google Scholar]
- Phan, M.-H.; Kim, K.H. Negotiating truck arrival times among trucking companies and a container terminal. Trans. Res. Part E 2015, 75, 132–144. [Google Scholar] [CrossRef]
- Carter, C.R.; Dale, S.R. A framework of sustainable supply chain management: Moving toward new theory. Int. J. Phys. Distrib. Logist. Manag. 2008, 38, 360–387. [Google Scholar] [CrossRef]
- Forslund, H.; Jonsson, P. The impact of forecast information quality on supply chain performance. Int. J. Oper. Prod. Manag. 2007, 27, 90–107. [Google Scholar] [CrossRef]
- Nürnberger, K.; Hochstrasser, M.; Holzapfel, F. Execution time analysis and optimization techniques in the model-based development of a flight control software. IET Cyber-Phys. Syst. Theory Appl. 2017, 2, 57–64. [Google Scholar] [CrossRef]
- Lyons, J.B.; Ho, N.; Koltai, K.; Masequesmay, G.; Skoog, M.; Cacanindin, A.; Johnson, W. A trust-based analysis of an Air Force collision avoidance system: Test pilots. Ergon. Des. 2016, 24, 9–12. [Google Scholar] [CrossRef]
- Hengstler, M.; Enkel, E.; Duelli, S. Applied artificial intelligence and trust—The case of autonomous vehicles and medical assistance devices. Technol. Forecast. Soc. Chang. 2016, 105, 105–120. [Google Scholar] [CrossRef]
- Jamson, A.H.; Merat, N.; Carsten, O.M.; Lai, F.C. Behavioural changes in drivers experiencing highly-automated vehicle control in varying traffic conditions. Trans. Res. Part C Emerg. Technol. 2013, 30, 116–125. [Google Scholar] [CrossRef]
- Lee, J.D.; See, K.A. Trust in technology: Designing for appropriate reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Hess, T.J.; Valacich, J.S. Why do we trust new technology? A study of initial trust formation with organizational information systems. J. Strateg. Inf. Syst. 2008, 17, 39–71. [Google Scholar] [CrossRef]
- Lee, H.-D.; Lee, B.-K.; Kim, W.-S.; Han, J.-S.; Shin, K.-S.; Han, C.-S. Human–robot cooperation control based on a dynamic model of an upper limb exoskeleton for human power amplification. Mechatronics 2014, 24, 168–176. [Google Scholar] [CrossRef]
- Weyer, J.; Fink, R.D.; Adelt, F. Human-machine cooperation in smart cars: An empirical investigation of the loss-of-control thesis. Saf. Sci. 2015, 72, 199–208. [Google Scholar] [CrossRef]
- Rauffet, P.; Lassalle, J.; Leroy, B.; Coppin, G.; Chauvina, C. The TAPAS project: Facilitating cooperation in hybrid combat air patrols including autonomous UCAVs. Procedia Manuf. 2015, 3, 974–981. [Google Scholar] [CrossRef] [Green Version]
- Rousseau, D.M.; Sitkin, S.B.; Burt, R.S.; Camerer, C. Not so different after all: A cross discipline view of trust. Acad. Manag. Rev. 1998, 23, 393–404. [Google Scholar] [CrossRef]
- Onnasch, L.; Wickens, C.D.; Li, H.; Manzey, D. Human performance consequences of stages and levels of automation: An integrated meta-analysis. Hum. Factors 2014, 56, 476–488. [Google Scholar] [CrossRef] [PubMed]
- Niedober, D.; Ho, N.; Masequesmay, G.; Koltai, K.; Skoog, M.; Cacanindin, A.; Johnson, W.; Lyons, J.B. Influence of cultural, organizational and automation factors on human-automation trust: A case study of Auto-GCAS engineers and developmental history. Int. Conf. Hum.-Comput. Interact. 2014, 8512, 473–484. [Google Scholar]
- König, M.; Neumayr, L. Users’ resistance towards radical innovations: The case of the self-driving car. Trans. Res. Part F Traffic Psychol. Behav. 2017, 44, 42–52. [Google Scholar] [CrossRef]
- Koo, J.; Kwac, J.; Ju, W.; Steinert, M.; Leifer, L.; Nass, C. Why did my car just do that? Explaining semi-autonomous driving actions to improve driver under-standing, trust, and performance. Int. J. Interact. Des. Manuf. 2015, 9, 269–275. [Google Scholar] [CrossRef]
- Richert, A.; Müller, S.; Schröder, S.; Jeschke, S. Anthropomorphism in social robotics: Empirical results on human–robot interaction in hybrid production workplaces. AI Soc. 2017, 1–12. [Google Scholar] [CrossRef]
- Chen, H.; Long, C.; Jiang, H.-B. Building a Belief-Desire-Intention Agent for Modeling Neural Networks. Appl. Artif. Intell. 2015, 29, 753–765. [Google Scholar] [CrossRef]
- Goertzel, B.; Pitt, J. Nine ways to bias open-source AGI toward friendliness. J. Evol. Technol. 2012, 22, 116–131. [Google Scholar]
- Gurkaynak, G.; Yilmaz, I.; Haksever, G. Stifling artificial intelligence: Human perils. Comput. Law Secur. Rev. 2016, 32, 749–758. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Makridakis, S. The forthcoming artificial intelligence (AI) revolution: Its impact on society and firms. Futures 2017, 90, 46–60. [Google Scholar] [CrossRef]
- Pyle, D.; San Jose, C. An Executive’s Guide to Machine Learning. McKinsey Q. June 2015. Available online: http://www.mckinsey.com/industries/high-tech/our-insights/an-executives-guide-to-machine-learning (accessed on 30 October 2017).
- Hernández-Orallo, J. Evaluation in artificial intelligence: From task-oriented to ability-oriented measurement. Artif. Intell. Rev. 2017, 48, 397–447. [Google Scholar] [CrossRef]
- Zhang, M.; Shaukat, A.; Yue, T.; Norgren, R.; Okaritz, O. Uncertainty-Wise Cyber-Physical System test modeling. Softw. Syst. Model. 2017, 1–40. [Google Scholar] [CrossRef]
- Hawking, S. AI Will be ‘Either Best or Worst Thing’ for Humanity. Available online: https://www.theguardian.com/science/2016/oct/19/stephen-hawking-ai-best-or-worst-thing-for-humanity-cambridge (accessed on 30 October 2017).
Figure 1.
Example for AI Application Expectations Optimizing Retail SKU and Turnover ([49], p. 3).
Figure 1.
Example for AI Application Expectations Optimizing Retail SKU and Turnover ([49], p. 3).
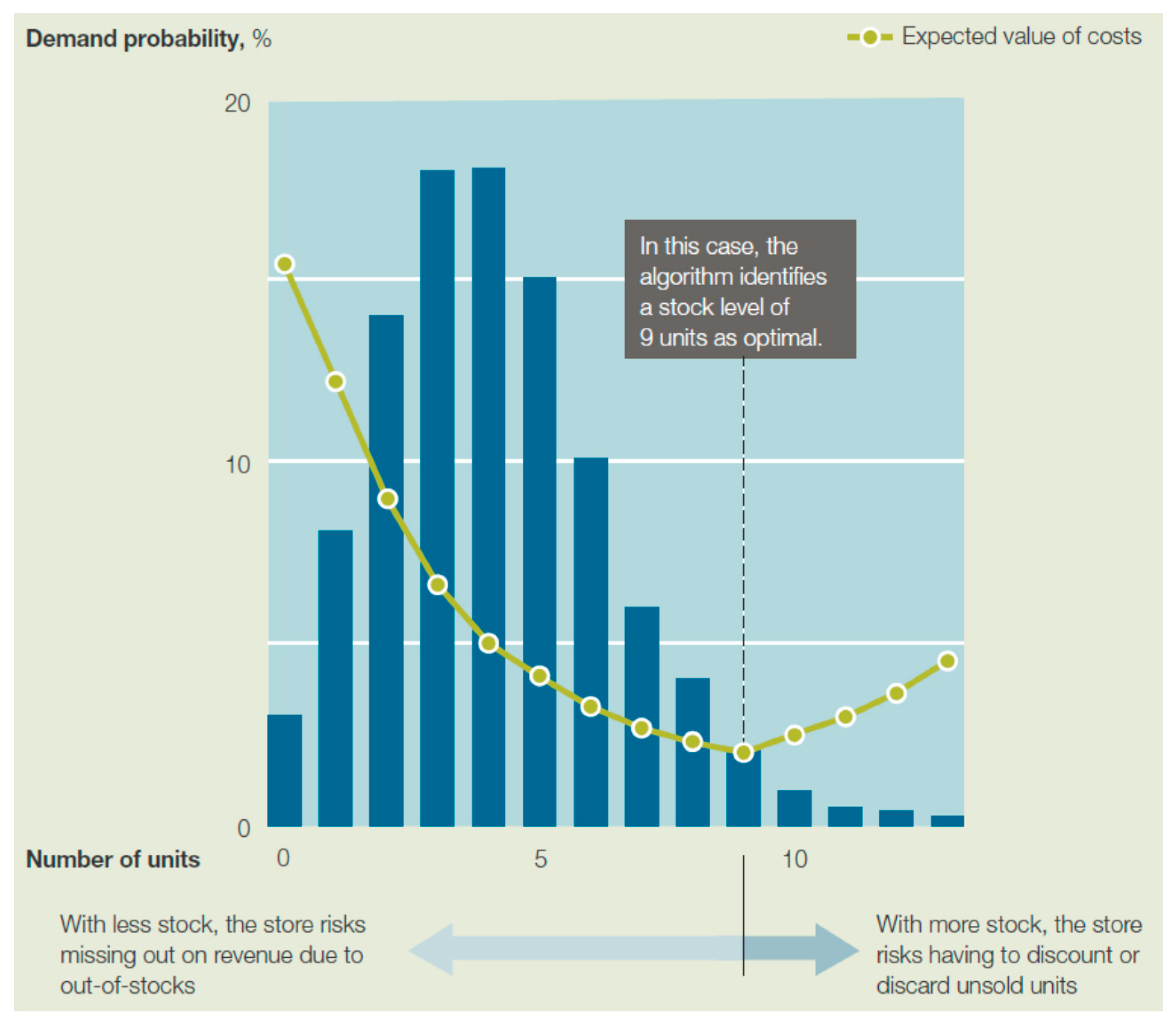
Figure 2.
TFA Framework (from [51], p. 288).
Figure 2.
TFA Framework (from [51], p. 288).
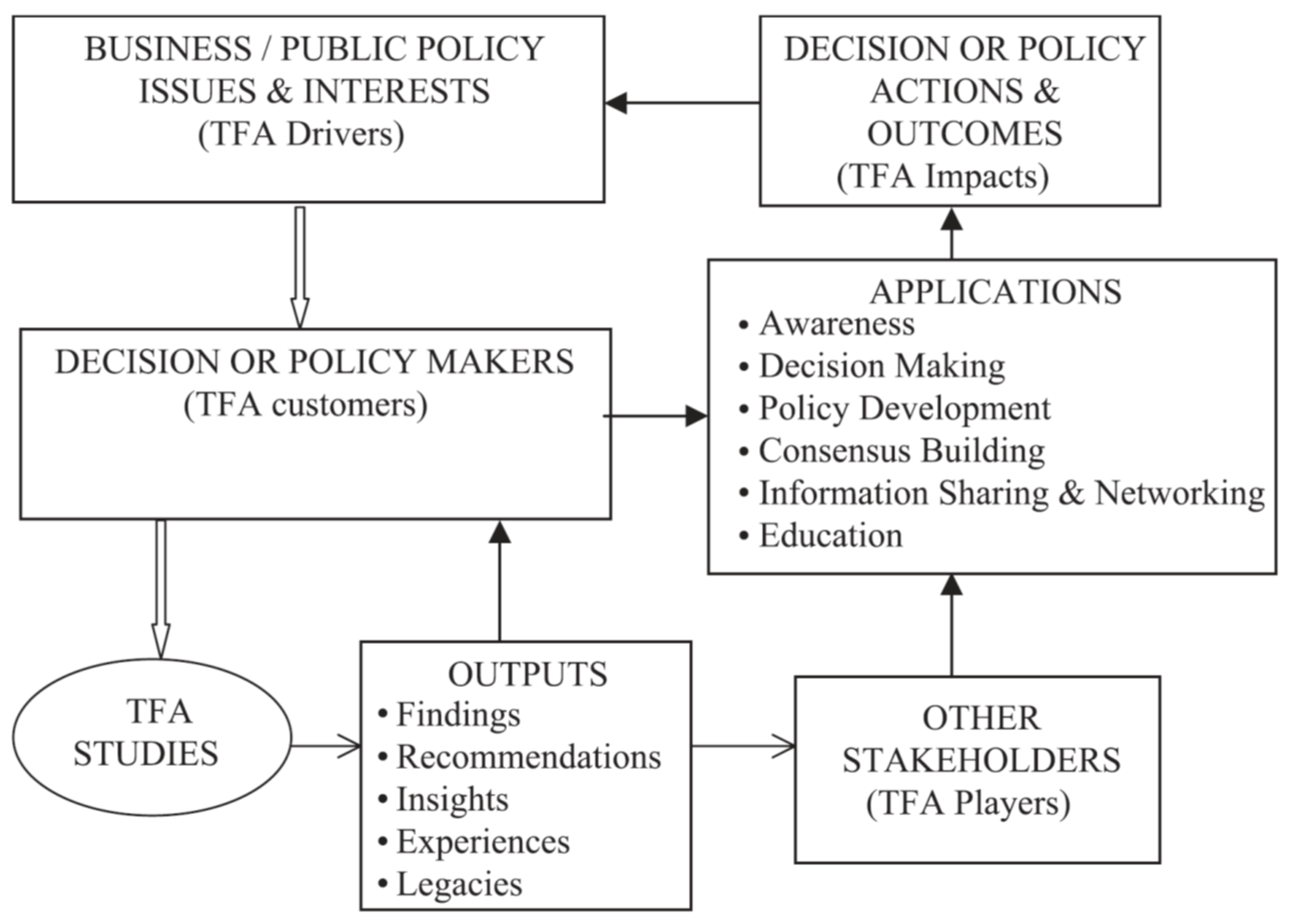
Figure 3.
Technology Extrapolation Forecast for the Fields CPS, AI, and IoT (author’s creation).
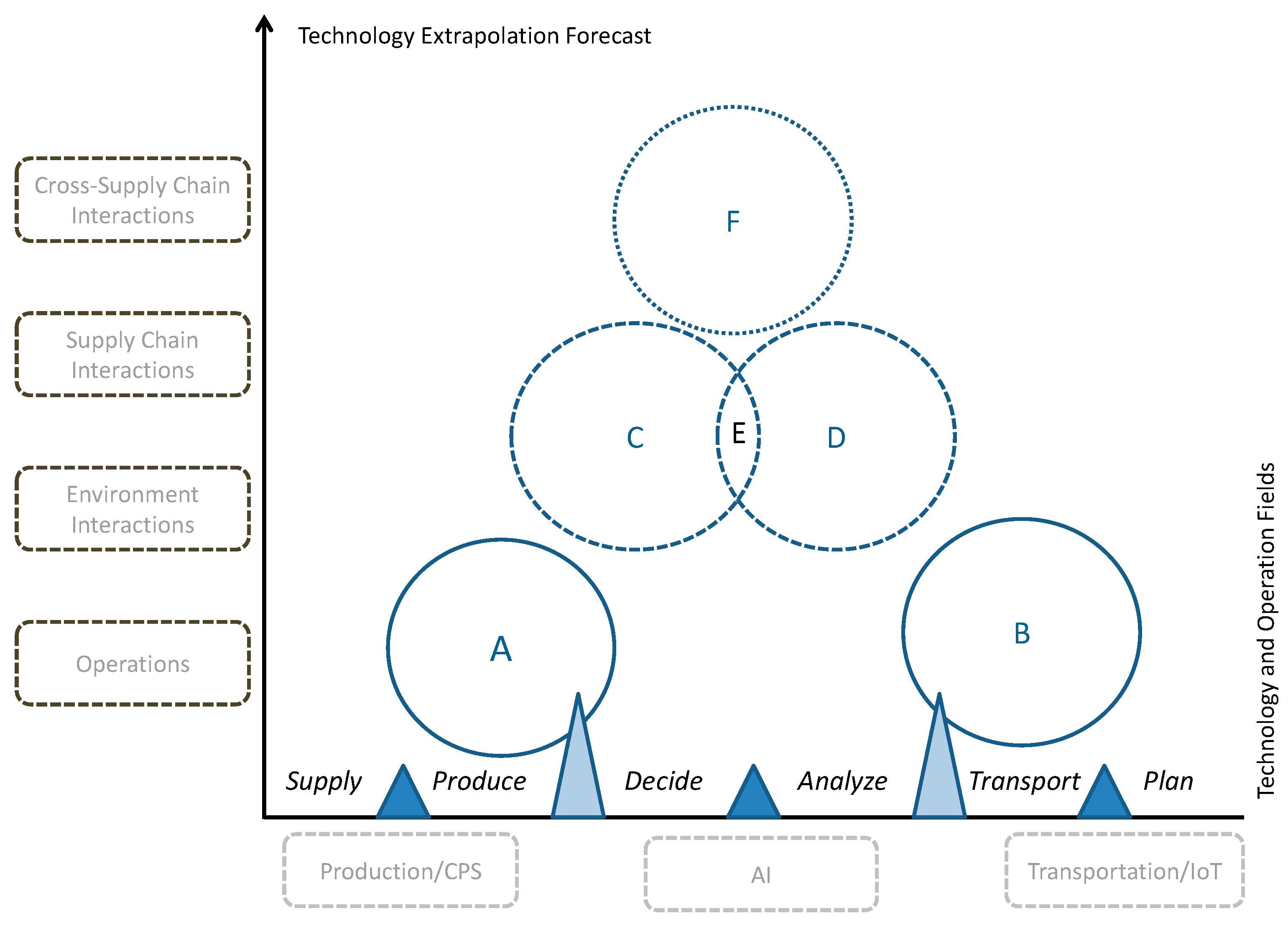
Figure 4.
Human acceptance resistance model (from [11]).
Figure 4.
Human acceptance resistance model (from [11]).
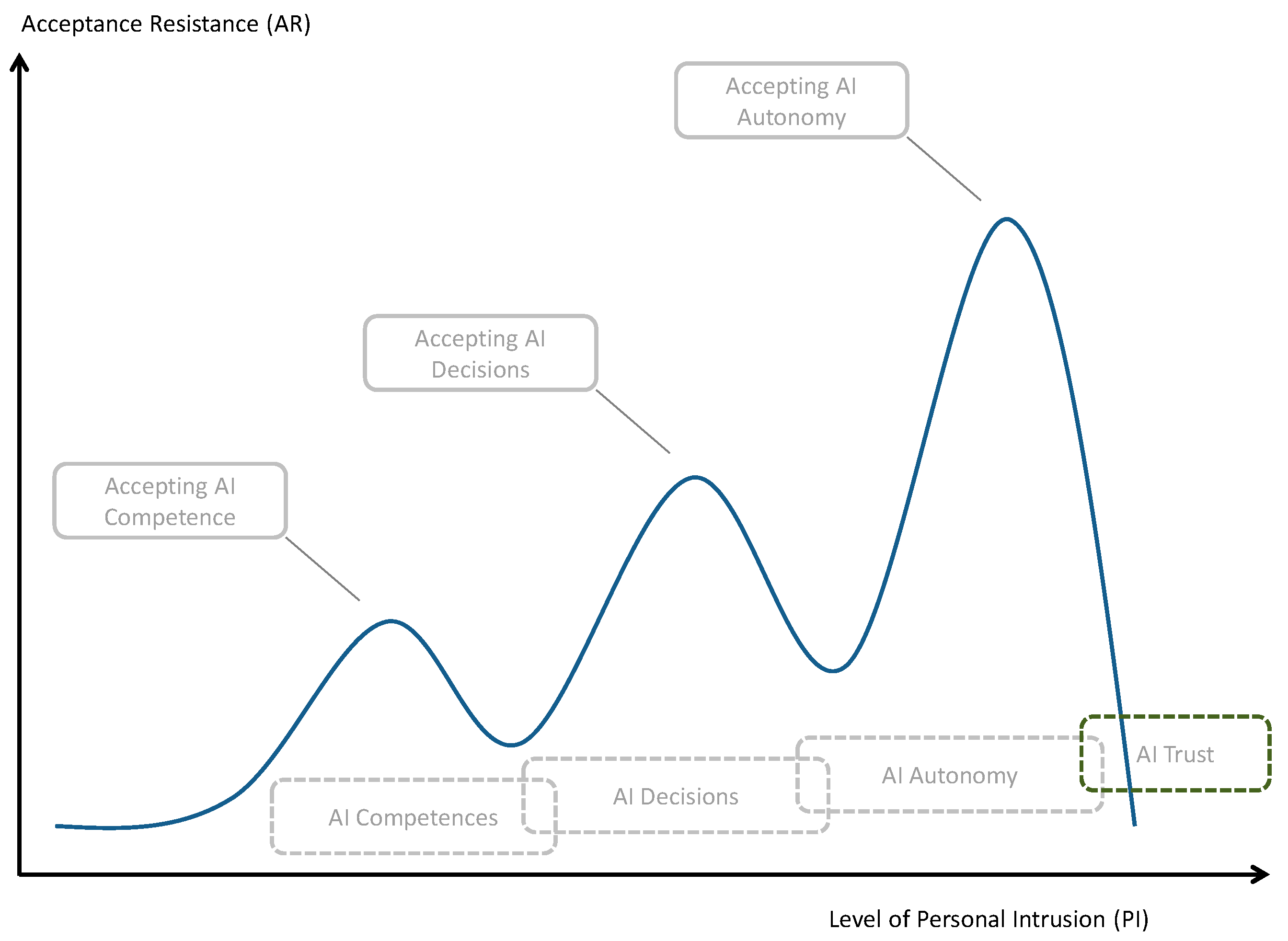
Figure 5.
Technology Forecasting and AI Acceptance in CPS, AI and IoT Areas (author’s creation).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Advances in AI Game Applications (from [14], pp. 12–13 and author additions).
Table 1.
Advances in AI Game Applications (from [14], pp. 12–13 and author additions).
| Game | Chronological Development |
|---|---|
| Backgammon | 1979: The backgammon program BKG by Hans Berliner defeats the world champion—the first computer program to defeat (in an exhibition match) a world champion in any game—though Berliner later attributes the win to luck with the dice rolls. 1992: The backgammon program TD-Gammon by Gerry Tesauro reaches championship level ability, using temporal differences learning (a form of reinforcement learning) and repeated plays against itself to improve. In the years since, backgammon programs have far surpassed the best human players. |
| Chess | 1997: Deep Blue beats the world chess champion, Garry Kasparov. Kasparov claims to have seen glimpses of true intelligence and creativity in some of the computer’s moves. Since then, chess engines have continued to improve. |
| Scrabble | As of 2002, Scrabble-playing software surpasses the best human players. |
| Jeopardy! | 2010: IBM’s Watson defeats the two all-time-greatest human Jeopardy! Champions, Ken Jennings and Brad Rutter. Jeopardy! Is a televised game show with trivia questions about history, literature, sports, geography, pop culture, science, and other topics. Questions are presented in the form of clues, and often involve wordplay. |
| Go | As of 2012, the Zen series of go-playing programs has reached rank 6 dan in fast games (the level of a very strong amateur player), using Monte Carlo tree search and machine learning techniques. Go-playing programs have been improving at a rate of about 1 dan/year in recent years. If this rate of improvement continues, they might beat the human world champion in about a decade. * * Addendum: AI application AlphaGo beat human world champion Lee Sedol in March 2016, [42,43]. Addendum II: The further improved AI application AlphaGo Zero was trained during 2017 without prior human knowledge, only with the game rules and by playing against itself—it is now unbeatable by humans and the strongest AI application regarding the game of Go [13]. |
| Poker | Addendum III: In 2017, also the first AI program was able to beat human players at head-up no-limit poker, in contrast to the above mentioned games of e.g., chess and go a non-perfect information setting [ 44,45,46]. Similarly to e.g., jeopardy! in this case it was expected to take much longer for AI instances to master such ‘human’ game settings including incomplete information and cheating. |
Table 2.
Technology Forecasting Method Overview.
| Method | Desription | Advantages |
|---|---|---|
| Delphi method | Repeated implementation of expert interviews in a qualitative setting describing and evaluating the probability of situations in the future |
|
| Analytical hierarchy process | Pairwise comparisons of hierarchical decision criteria by experts; quantitative method requiring a predetermined hierarchy of criteria as well as group of experts applying the comparisons |
|
| Patent analysis | Tool for studying the information attached to patents as intellectual property, e.g., by using spreadsheet-based data analysis or software-based patent analysis tools |
|
| Bibliometric analysis | Statistical analysis of available (scientific) books and articles; citation analysis is based on constructing the citation graph, a network or graph representation of the citations between documents; many research fields use bibliometric methods to explore the impact of specific researchers, papers or ideas and thought schools |
|
| Relevance tree | Starting from an objective, the most appropriate path of the tree has to be identified by arranging the objectives, subobjectives and tasks in a hierarchical order; this should ensure that all possible ways of achieving the objectives are found; the relevance of individual tasks and subobjectives to the overall objective is evaluated |
|
| Growth curve | Application of a standard innovation and expansion model to nascent technologies e.g., by assuming specific growth rates or historical growth data |
|
| Extrapolation | Extension of existing (quantitative) data or (qualitative) knowledge based on historical events and data/knowledge |
|
| Case studies | Extended description of operational implementation based on an existing company or organizational setting |
|
| Scenario writing | Extended description of a comprehensive situation or application starting from a known point and technological status in time |
|
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Klumpp, M. Innovation Potentials and Pathways Merging AI, CPS, and IoT. Appl. Syst. Innov. 2018, 1, 5. https://doi.org/10.3390/asi1010005
AMA Style
Klumpp M. Innovation Potentials and Pathways Merging AI, CPS, and IoT. Applied System Innovation. 2018; 1(1):5. https://doi.org/10.3390/asi1010005
Chicago/Turabian StyleKlumpp, Matthias. 2018. "Innovation Potentials and Pathways Merging AI, CPS, and IoT" Applied System Innovation 1, no. 1: 5. https://doi.org/10.3390/asi1010005