
A Comparison of Surrogate Modeling Techniques for Global Sensitivity Analysis in Hybrid Simulation


Abstract
:1. Introduction
2. Surrogate Modeling Methods
2.1. Polynomial Chaos Expansion
2.1.1. Polynomial Basis
2.1.2. Truncation Schemes
2.1.3. PCE Coefficient Calculation
2.2. Kriging
2.2.1. Trend Families
2.2.2. Autocorrelation Functions
2.2.3. Hyperparameter Estimation
2.2.4. Optimization Methods
2.3. Polynomial Chaos Kriging
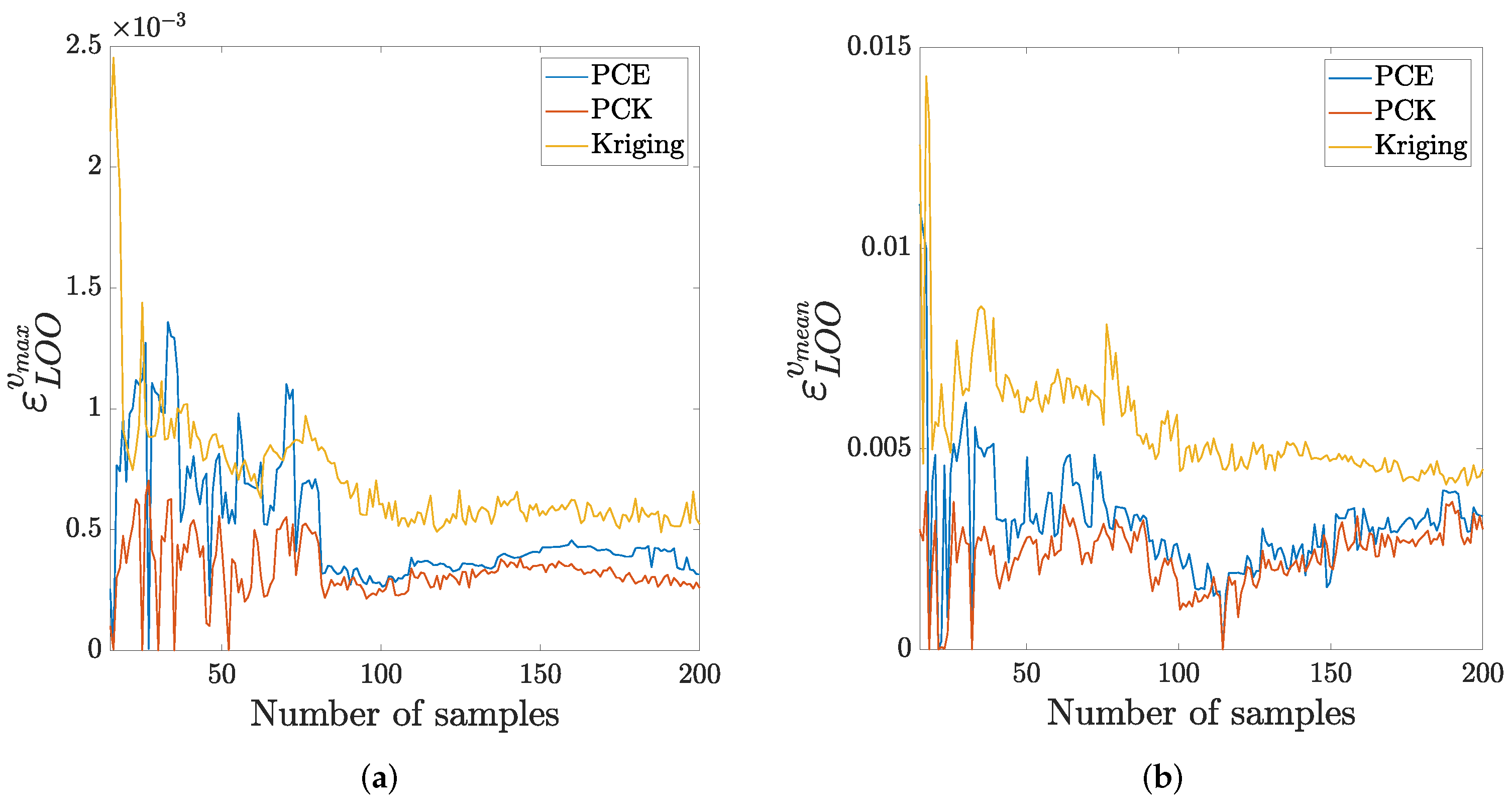
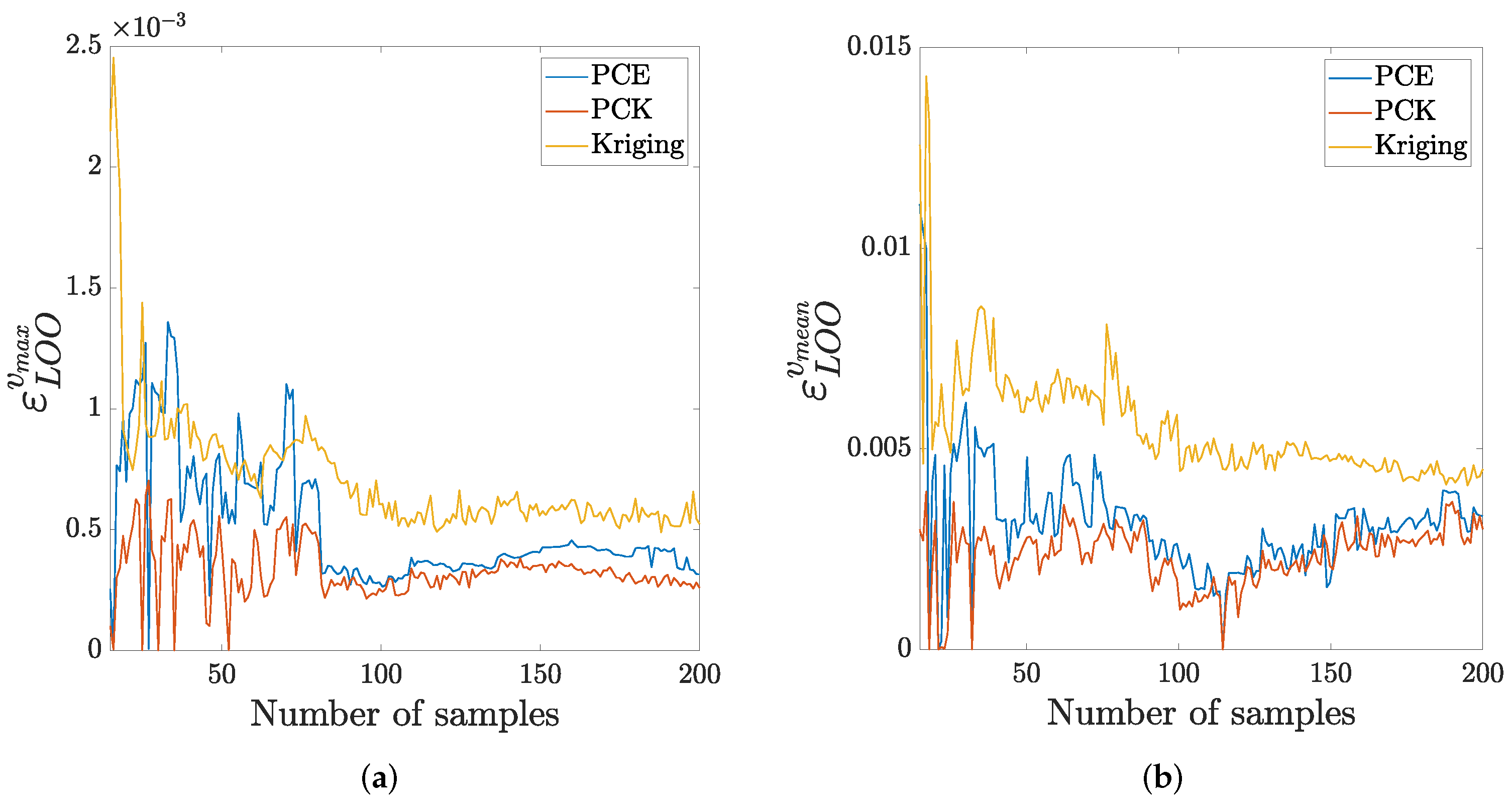
2.4. Leave-One-Out Cross-Validation Error
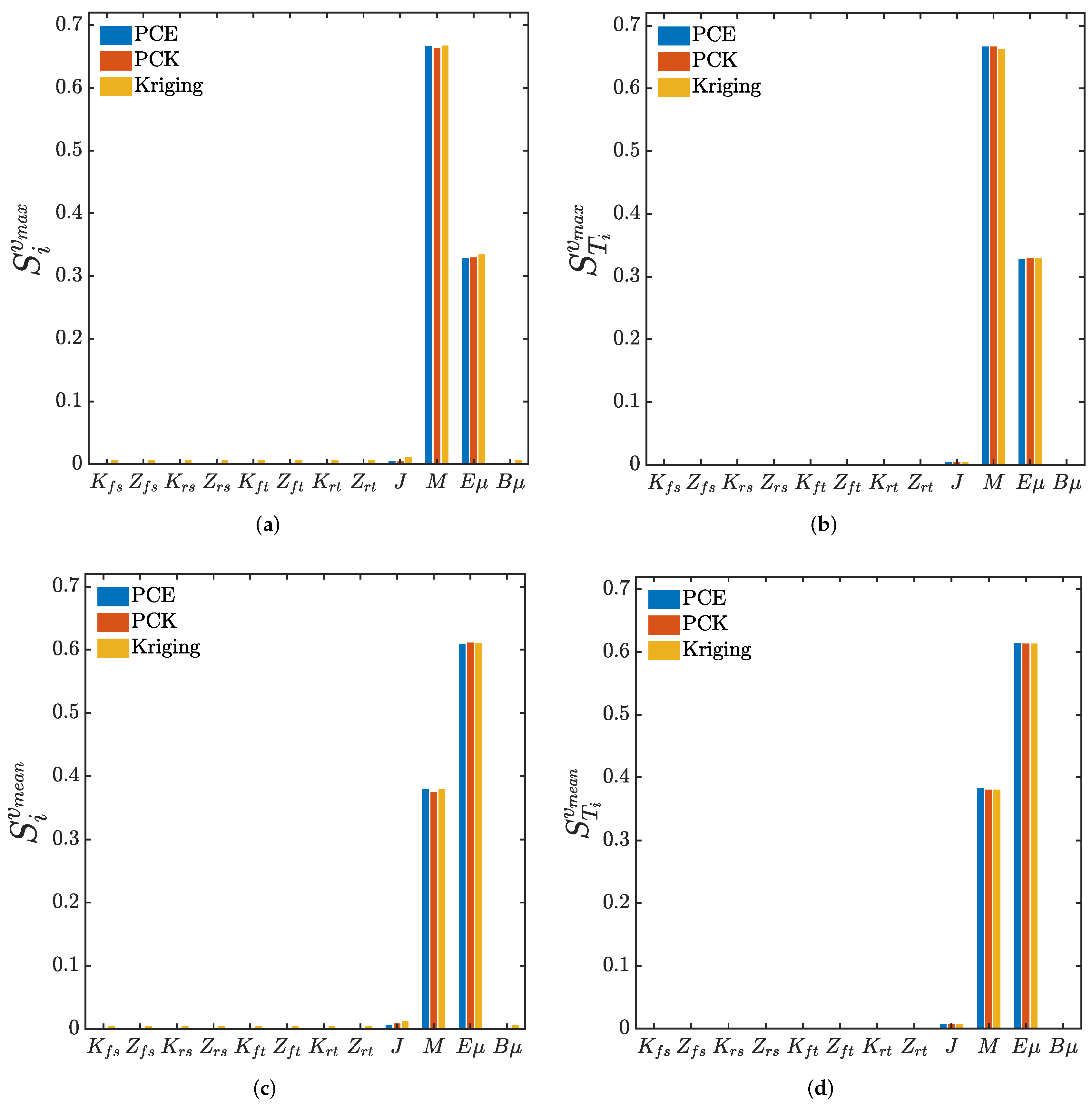
3. Global Sensitivity Analysis with Sobol’ Indices
3.1. Sobol’–Hoeffding Decomposition
3.2. Sobol’ Indices
3.3. Sobol’ Indices Estimation
3.3.1. Monte Carlo-Based Estimation
3.3.2. Sobol’ Indices from Polynomial Chaos Expansion
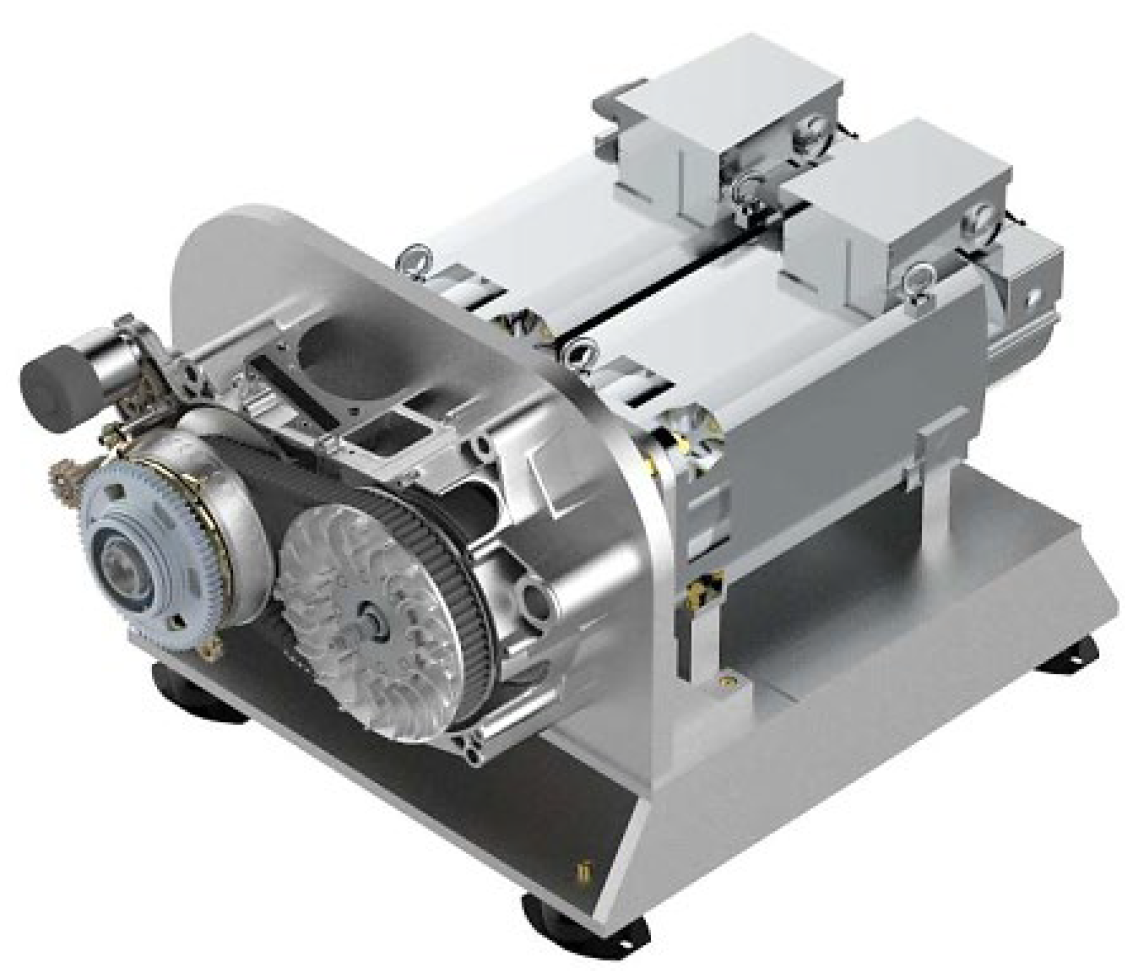
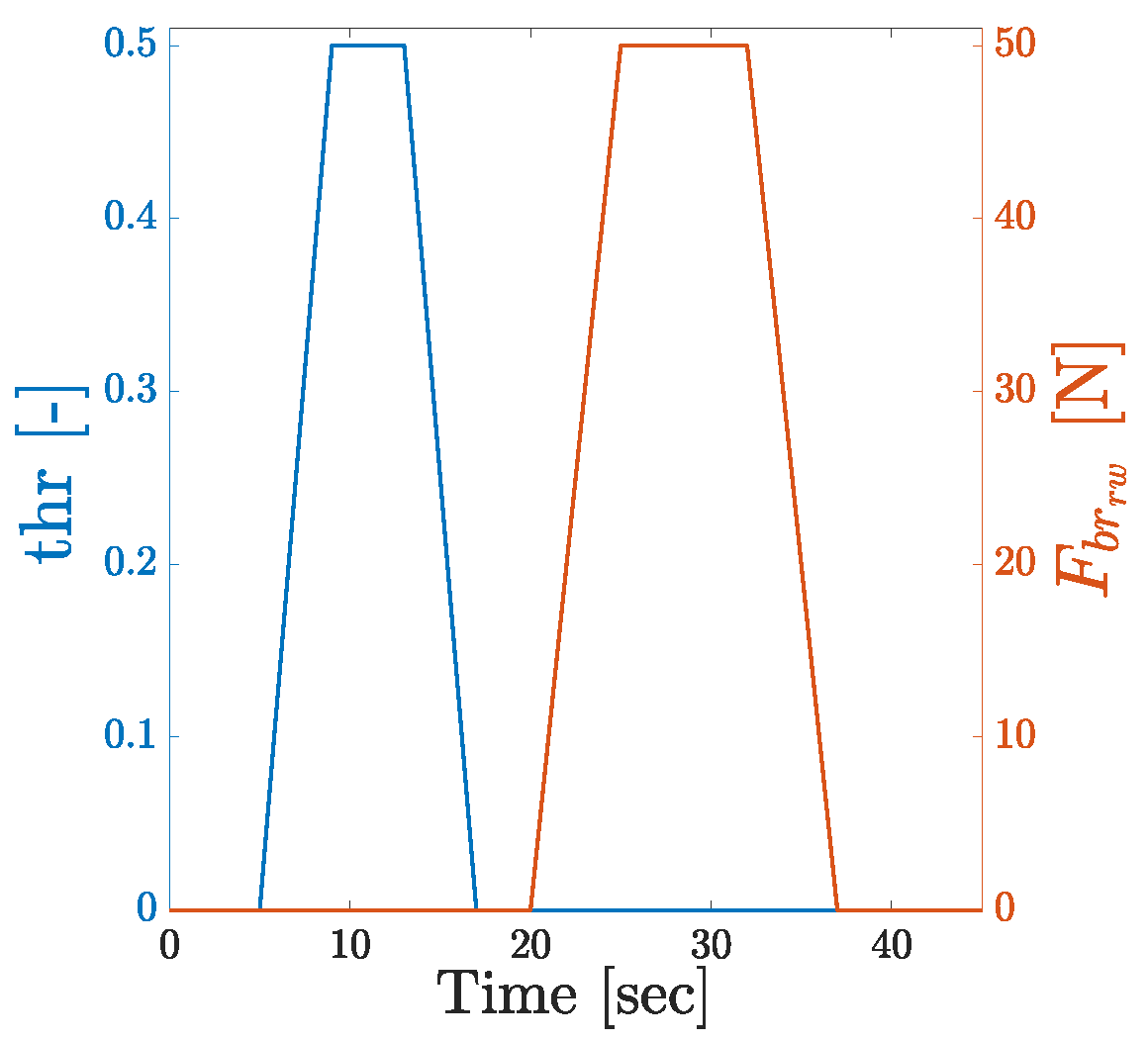
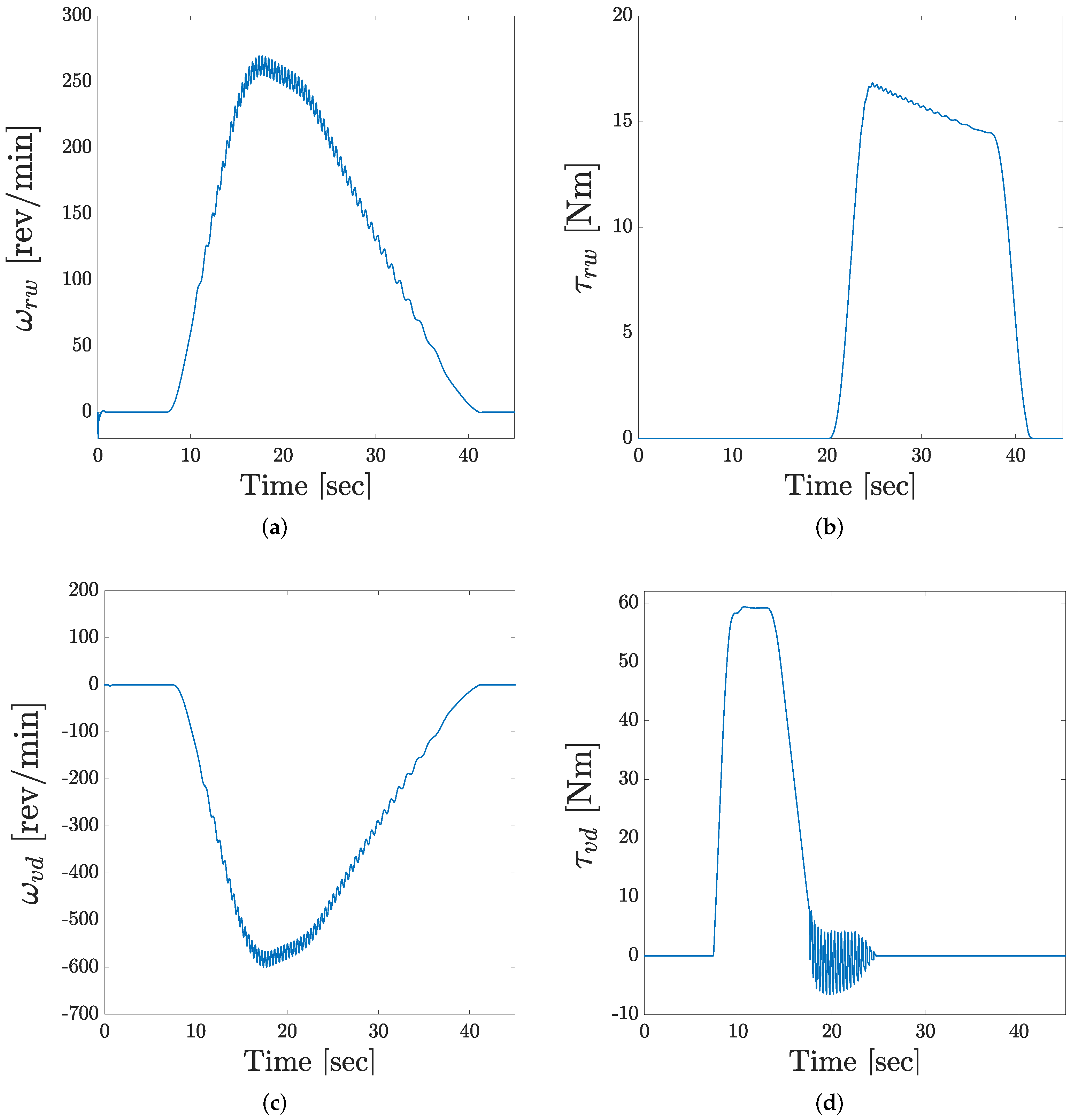
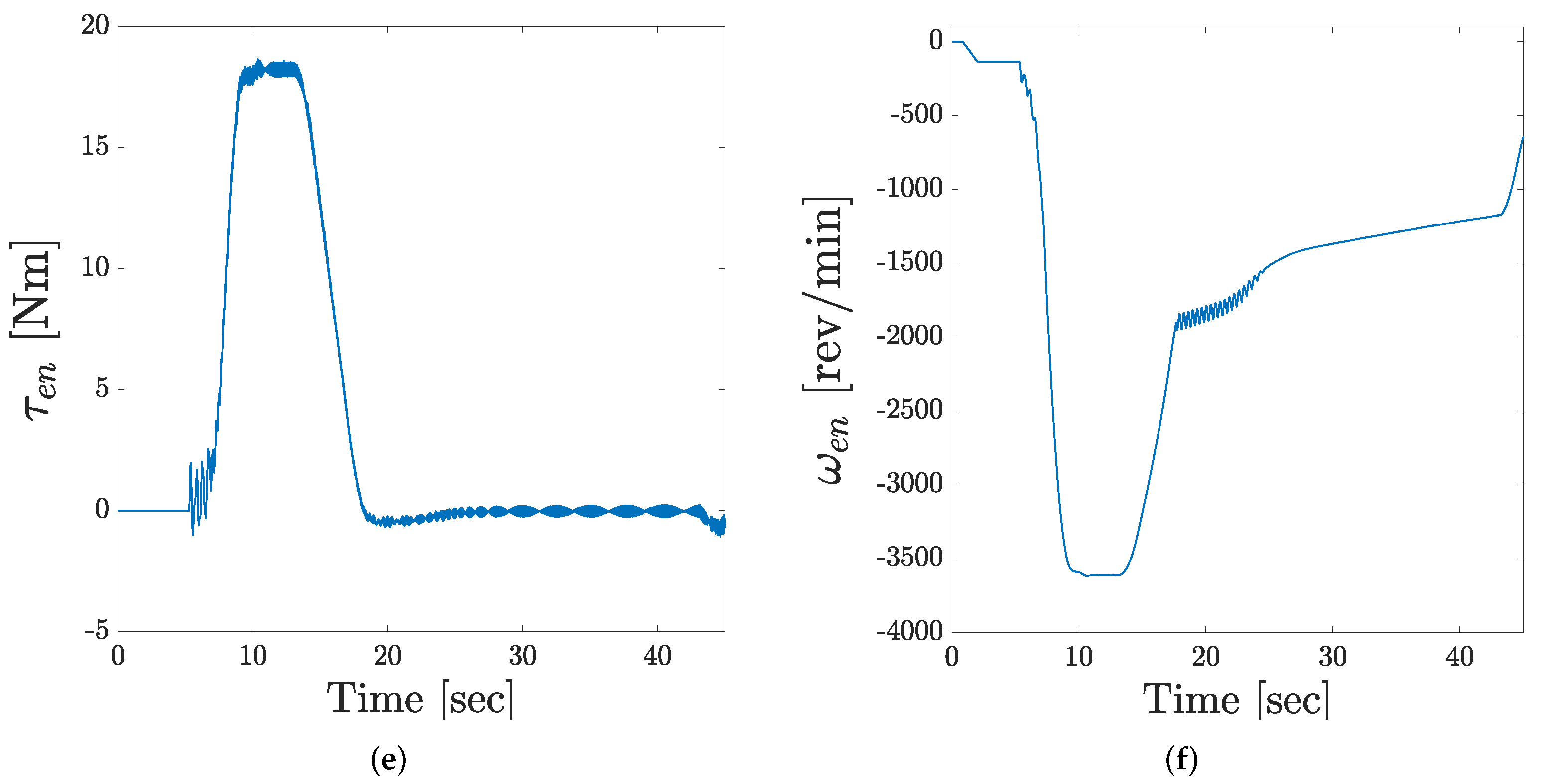
4. Case Study
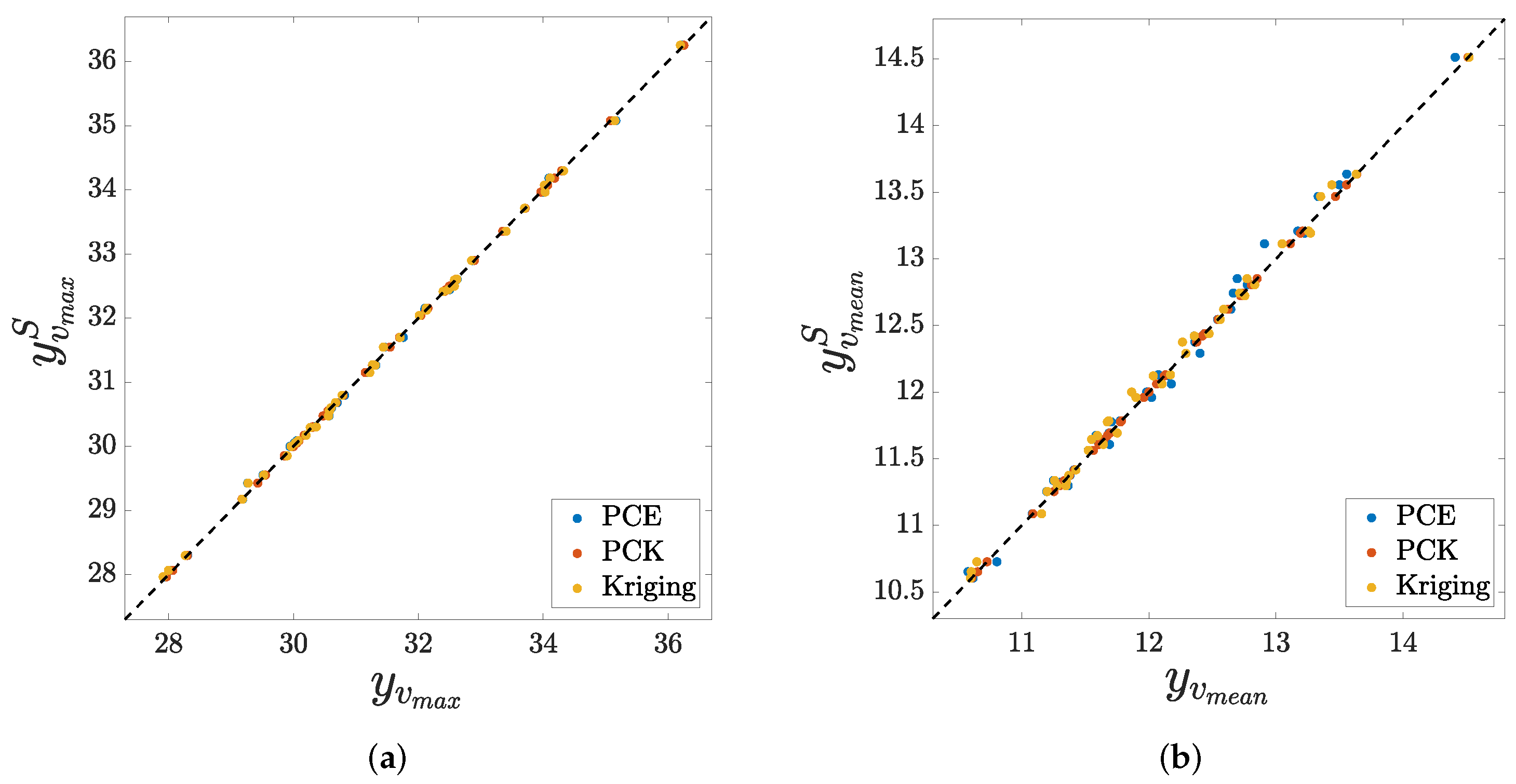
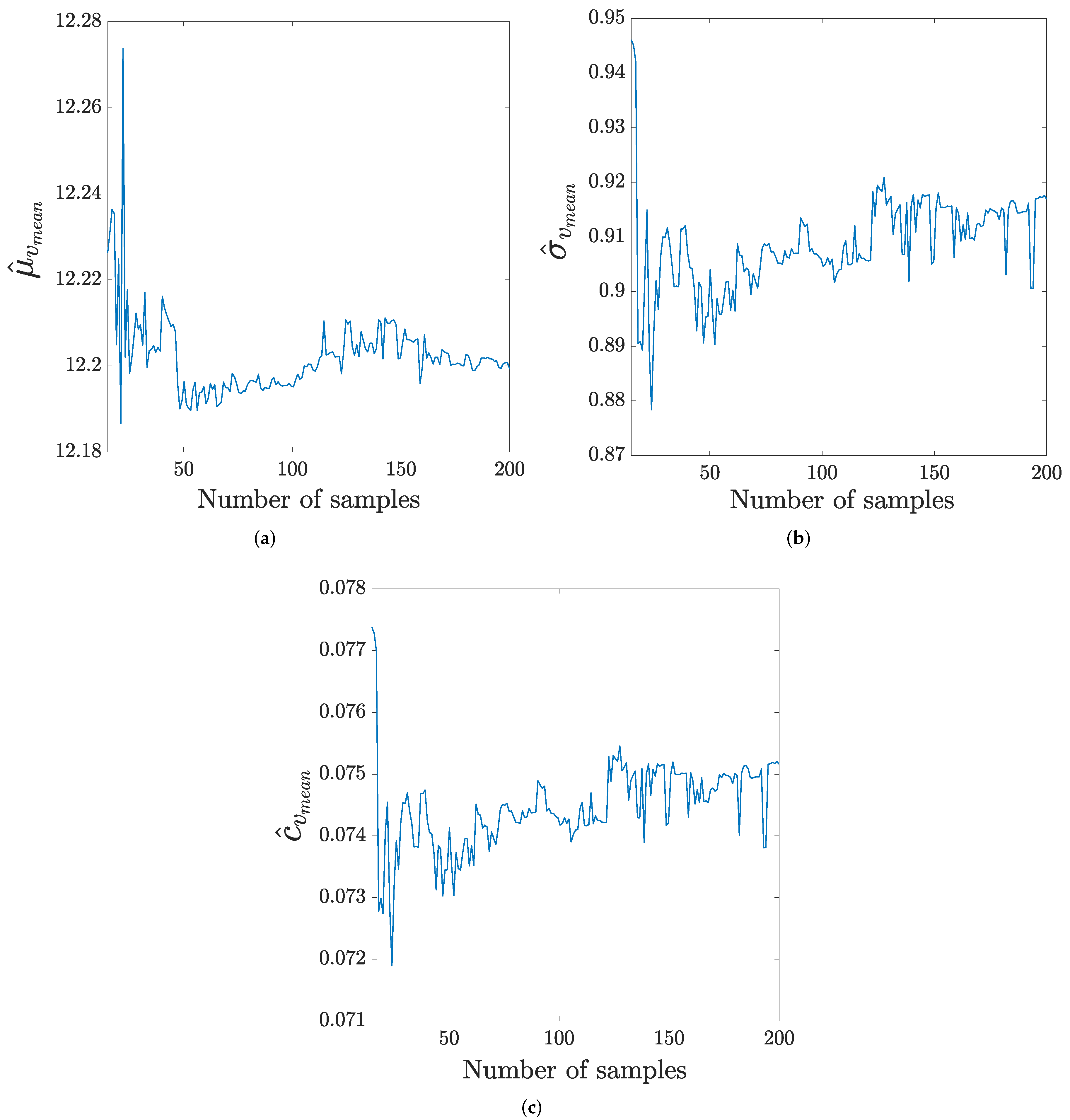
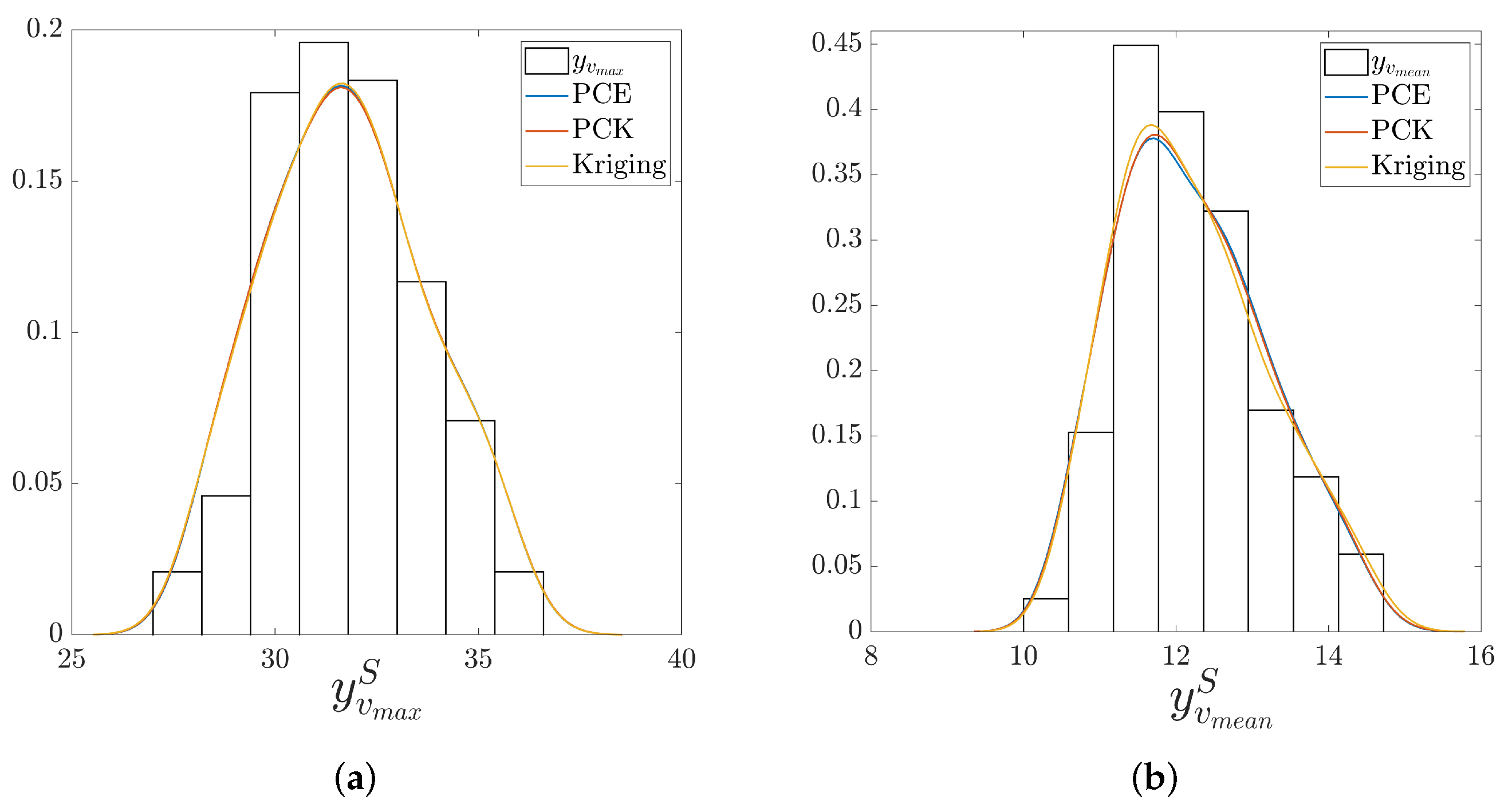
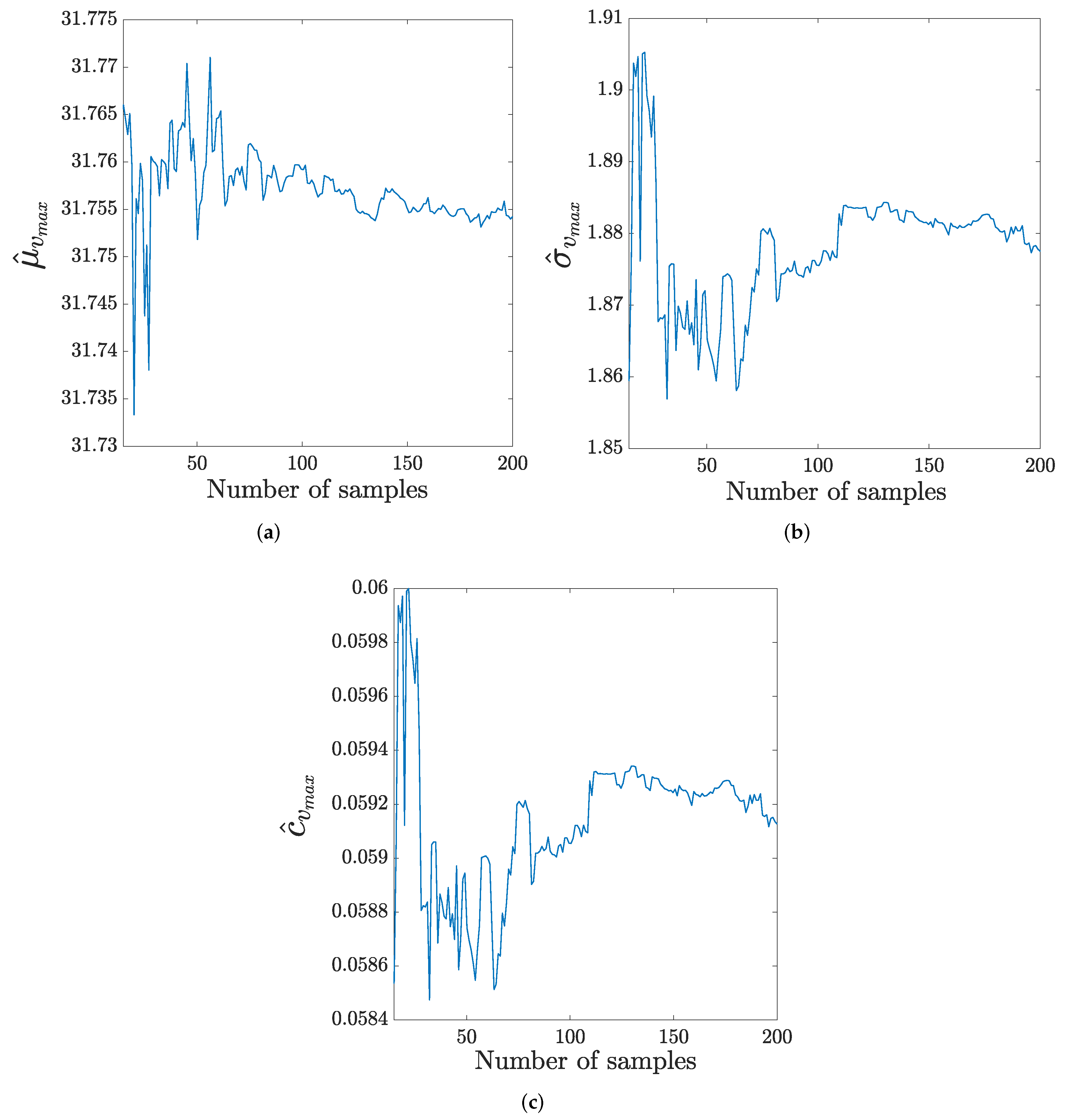
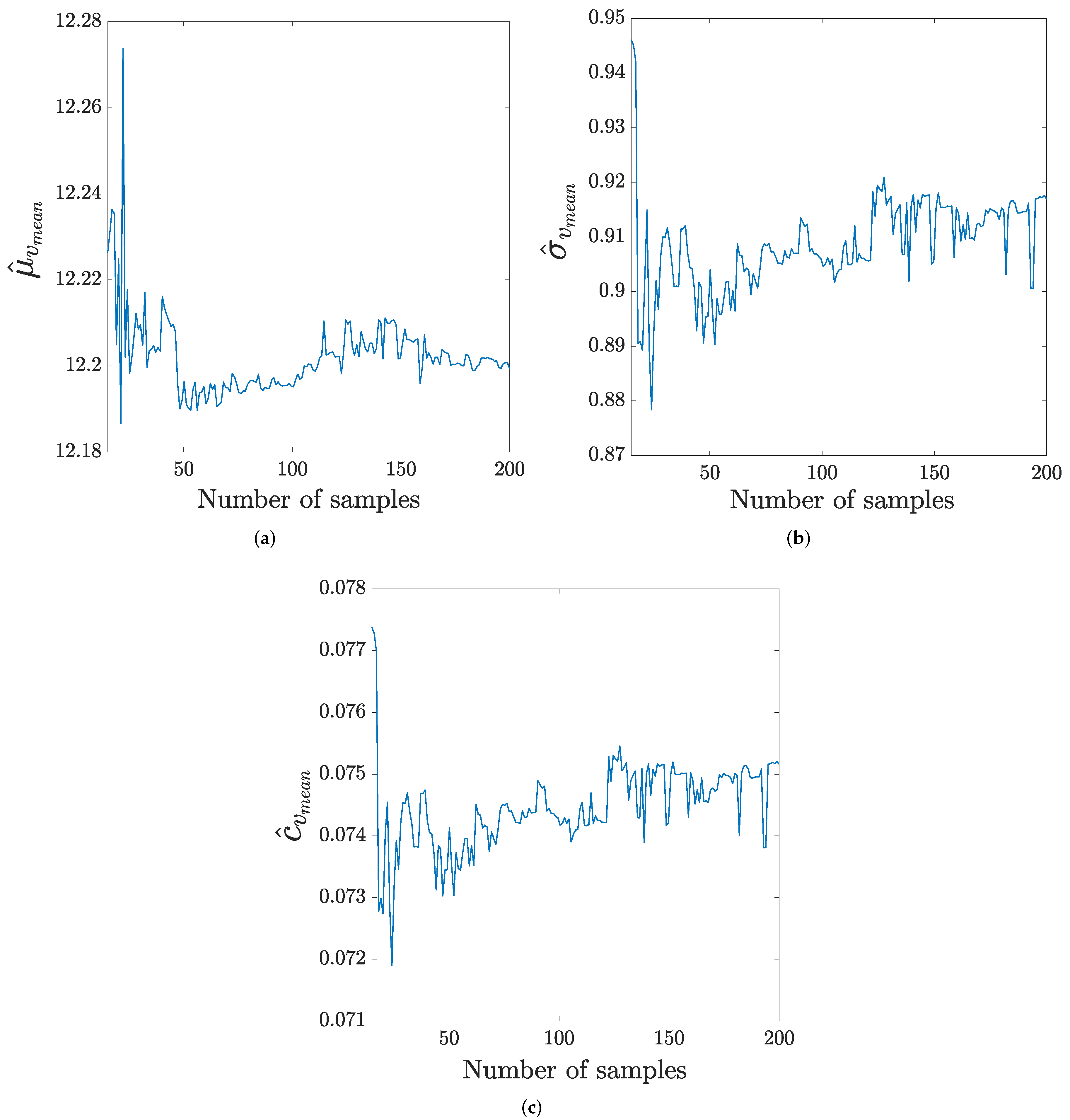
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tsokanas, N.; Wagg, D.; Stojadinović, B. Robust Model Predictive Control for Dynamics Compensation in Real-Time Hybrid Simulation. Front. Built Environ. 2020, 6, 127. [Google Scholar] [CrossRef]
- Tsokanas, N.; Pastorino, R.; Stojadinovic, B. Adaptive model predictive control for actuation dynamics compensation in real-time hybrid simulation. engrXiv 2021. [Google Scholar] [CrossRef]
- Li, H.; Maghareh, A.; Montoya, H.; Condori Uribe, J.W.; Dyke, S.J.; Xu, Z. Sliding mode control design for the benchmark problem in real-time hybrid simulation. Mech. Syst. Signal Process. 2021, 151, 107364. [Google Scholar] [CrossRef]
- Simpson, T.; Dertimanis, V.K.; Chatzi, E.N. Towards Data-Driven Real-Time Hybrid Simulation: Adaptive Modeling of Control Plants. Front. Built Environ. 2020, 6, 158. [Google Scholar] [CrossRef]
- Tsokanas, N.; Simpson, T.; Pastorino, R.; Chatzi, E.; Stojadinovic, B. Model Order Reduction for Real-Time Hybrid Simulation: Comparing Polynomial Chaos Expansion and Neural Network methods. engrXiv 2021. [Google Scholar] [CrossRef]
- Miraglia, G.; Petrovic, M.; Abbiati, G.; Mojsilovic, N.; Stojadinovic, B. A model-order reduction framework for hybrid simulation based on component-mode synthesis. Earthq. Eng. Struct. Dyn. 2020, 49, 737–753. [Google Scholar] [CrossRef]
- Schellenberg, A.H.; Mahin, S.A.; Fenves, G.L. Advanced Implementation of Hybrid Simulation; Technical Report PEER 2009/104; Pacific Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 2009. [Google Scholar]
- Tsokanas, N. Real-Time and Stochastic Hybrid Simulation. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2021. [Google Scholar] [CrossRef]
- Abbiati, G.; Lanese, I.; Cazzador, E.; Bursi, O.S.; Pavese, A. A computational framework for fast-time hybrid simulation based on partitioned time integration and state-space modeling. Struct. Control Health Monit. 2019, 26, e2419. [Google Scholar] [CrossRef]
- Abbiati, G.; Covi, P.; Tondini, N.; Bursi, O.S.; Stojadinović, B. A Real-Time Hybrid Fire Simulation Method Based on Dynamic Relaxation and Partitioned Time Integration. J. Eng. Mech. 2020, 146, 04020104. [Google Scholar] [CrossRef]
- Song, W.; Sun, C.; Zuo, Y.; Jahangiri, V.; Lu, Y.; Han, Q. Conceptual Study of a Real-Time Hybrid Simulation Framework for Monopile Offshore Wind Turbines Under Wind and Wave Loads. Front. Built Environ. 2020, 6, 129. [Google Scholar] [CrossRef]
- Idinyang, S.; Franza, A.; Heron, C.M.; Marshall, A.M. Real-time data coupling for hybrid testing in a geotechnical centrifuge. Int. J. Phys. Model. Geotech. 2018, 19, 208–220. [Google Scholar] [CrossRef]
- Tsokanas, N.; Abbiati, G.; Kanellopoulos, K.; Stojadinovic, B. Multi-Axial Hybrid Fire Testing based on Dynamic Relaxation. Fire Saf. J. 2021, 126, 103468. [Google Scholar] [CrossRef]
- Tsokanas, N.; Stojadinovic, B. A stochastic real-time hybrid simulation of the seismic response of a magnetorheological damper. In Proceedings of the 17th World Conference on Earthquake Engineering (17WCEE 2020), Sendai, Japan, 13–18 September 2020. [Google Scholar] [CrossRef]
- Tsokanas, N.; Stojadinovic, B. Design of an Actuation Controller for Physical Substructures in Stochastic Real-Time Hybrid Simulations. In Model Validation and Uncertainty Quantification; Mao, Z., Ed.; Society for Experimental Mechanics Series; Springer International Publishing: Cham, Switzerland, 2020; Volume 3, pp. 69–82. [Google Scholar] [CrossRef]
- Abbiati, G.; Marelli, S.; Tsokanas, N.; Sudret, B.; Stojadinović, B. A global sensitivity analysis framework for hybrid simulation. Mech. Syst. Signal Process. 2021, 146, 106997. [Google Scholar] [CrossRef]
- Tsokanas, N.; Zhu, X.; Abbiati, G.; Marelli, S.; Sudret, B.; Stojadinović, B. A Global Sensitivity Analysis Framework for Hybrid Simulation with Stochastic Substructures. Front. Built Environ. 2021, 7, 154. [Google Scholar] [CrossRef]
- Saltelli, A.; Ratto, M.; Andres, T.; Campolongo, F.; Cariboni, J.; Gatelli, D.; Saisana, M.; Tarantola, S. Global Sensitivity Analysis. The Primer; John Wiley & Sons, Ltd.: Chichester, UK, 2007; Volume 76. [Google Scholar]
- Sudret, B. Global sensitivity analysis using polynomial chaos expansions. Reliab. Eng. Syst. Saf. 2008, 93, 964–979. [Google Scholar] [CrossRef]
- Le Gratiet, L.; Marelli, S.; Sudret, B. Metamodel-Based Sensitivity Analysis: Polynomial Chaos Expansions and Gaussian Processes. In Handbook of Uncertainty Quantification; Ghanem, R., Higdon, D., Owhadi, H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 1289–1325. [Google Scholar]
- Ghanem, R.; Spanos, P.D. Polynomial Chaos in Stochastic Finite Elements. J. Appl. Mech. 1990, 57, 197–202. [Google Scholar] [CrossRef]
- Xiu, D.; Karniadakis, G.E. The Wiener–Askey Polynomial Chaos for Stochastic Differential Equations. SIAM J. Sci. Comput. 2002, 24, 619–644. [Google Scholar] [CrossRef]
- Spiridonakos, M.D.; Chatzi, E.N. Metamodeling of dynamic nonlinear structural systems through polynomial chaos NARX models. Comput. Struct. 2015, 157, 99–113. [Google Scholar] [CrossRef]
- Torre, E.; Marelli, S.; Embrechts, P.; Sudret, B. Data-driven polynomial chaos expansion for machine learning regression. J. Comput. Phys. 2019, 388, 601–623. [Google Scholar] [CrossRef] [Green Version]
- Marelli, S.; Sudret, B. UQLab User Manual—Polynomial Chaos Expansions; Technical Report # UQLab-V1.3-104; Risk, Safety and Uncertainty Quantification, ETH Zurich: Zurich, Switzerland, 2019. [Google Scholar]
- Blatman, G.; Sudret, B. Adaptive sparse polynomial chaos expansion based on least angle regression. J. Comput. Phys. 2011, 230, 2345–2367. [Google Scholar] [CrossRef]
- Berveiller, M.; Sudret, B.; Lemaire, M. Stochastic finite element: A non intrusive approach by regression. Eur. J. Comput. Mech. 2006, 15, 81–92. [Google Scholar] [CrossRef] [Green Version]
- Eldred, M.; Webster, C.; Constantine, P. Evaluation of Non-Intrusive Approaches for Wiener-Askey Generalized Polynomial Chaos. In Proceedings of the 49th AIAA Structures, Structural Dynamics, and Materials Conference, Schaumburg, IL, USA, 7–10 April 2008. [Google Scholar]
- Zhang, J.; Yue, X.; Qiu, J.; Zhuo, L.; Zhu, J. Sparse polynomial chaos expansion based on Bregman-iterative greedy coordinate descent for global sensitivity analysis. Mech. Syst. Signal Process. 2021, 157, 107727. [Google Scholar] [CrossRef]
- Santner, T.J.; Williams, B.J.; Notz, W.I. The Design and Analysis of Computer Experiments; Springer Series in Statistics; Springer: New York, NY, USA, 2003. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning (Adaptive Computation and Machine Learning); The MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Lataniotis, C.; Wicaksono, D.; Marelli, S.; Sudret, B. UQLab User Manual —Kriging (Gaussian Process Modeling); Technical Report # UQLab-V1.3-105; Risk, Safety and Uncertainty Quantification, ETH Zurich: Zurich, Switzerland, 2019. [Google Scholar]
- Dubourg, V. Adaptive Surrogate Models for Reliability Analysis and Reliability-Based Design Optimization. Ph.D. Thesis, Université Blaise Pascal-Clermont-Ferrand II, Clermont-Ferrand, France, 2011. [Google Scholar]
- Goldberg, D.E.; Holland, J.H. Genetic Algorithms and Machine Learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Schobi, R.; Sudret, B.; Wiart, J. Polynomial-chaos-based Kriging. Int. J. Uncertain. Quantif. 2015, 5, 171–193. [Google Scholar] [CrossRef]
- Schöbi, R.; Sudret, B.; Marelli, S. Rare Event Estimation Using Polynomial-Chaos Kriging. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2017, 3, D4016002. [Google Scholar] [CrossRef] [Green Version]
- Kersaudy, P.; Sudret, B.; Varsier, N.; Picon, O.; Wiart, J. A new surrogate modeling technique combining Kriging and polynomial chaos expansions—Application to uncertainty analysis in computational dosimetry. J. Comput. Phys. 2015, 286, 103–117. [Google Scholar] [CrossRef] [Green Version]
- Schöbi, R.; Marelli, S.; Sudret, B. UQLab User Manual—Polynomial Chaos Kriging; Technical Report # UQLab-V1.3-109; Risk, Safety and Uncertainty Quantification, ETH Zurich: Zurich, Switzerland, 2019. [Google Scholar]
- Sobol’, I.M. Sensitivity analysis for non-linear mathematical models. Math. Model. Comput. Exp. 1993, 1, 407–414. [Google Scholar]
- Marelli, S.; Lamas, C.; Konakli, K.; Mylonas, C.; Wiederkehr, P.; Sudret, B. UQLab User Manual—Sensitivity Analysis; Technical Report # UQLab-V1.3-106; Risk, Safety and Uncertainty Quantification, ETH Zurich: Zurich, Switzerland, 2019. [Google Scholar]
- Pinheiro, S.M. Motorcycle Modeling for eCVT-in-the-Loop Real-Time Hybrid Testing. Master’s Thesis, University of Porto, Porto, Portugal, 2020. [Google Scholar]
- Kimishima, T.; Nakamura, T.; Suzuki, T. The Effects on Motorcycle Behavior of the Moment of Inertia of the Crankshaft. SAE Trans. 1997, 106, 1993–2003. [Google Scholar]
- Tanelli, M. Modelling, Simulation and Control of Two-Wheeled Vehicles; John Wiley & Sons: New, York, NY, USA, 2014. [Google Scholar]
- Sharp, R.; Evangelou, S.; Limebeer, D. Advances in the Modelling of Motorcycle Dynamics. Multibody Syst. Dyn. 2004, 12, 251–283. [Google Scholar] [CrossRef] [Green Version]
- Jia, S.; Li, Q. Friction-induced vibration and noise on a brake system. In Proceedings of the 2013 IEEE International Conference on Information and Automation (ICIA), Yinchuan, China, 26–28 August 2013; pp. 489–492. [Google Scholar] [CrossRef]
- Mckay, M.D.; Beckman, R.J.; Conover, W.J. A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 2000, 42, 55–61. [Google Scholar] [CrossRef]
- Marelli, S.; Sudret, B. UQLab: A Framework for Uncertainty Quantification in Matlab. In Proceedings of the 2nd International Conference on Vulnerability, Risk Analysis and Management (ICVRAM2014), Liverpool, UK, 13–16 July 2014; pp. 2554–2563. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Param. | Prob. Distrib. | Mean Value | Stand. Dev. | CV (%) | Parameter Description | Units |
|---|---|---|---|---|---|---|
| Unif. | 58,570 | 11,714 | 20 | Vertical stiffness rear tire | ||
| Unif. | 11,650 | 3495 | 30 | Vertical damping rear tire | ||
| Unif. | 25,000 | 5000 | 20 | Vertical stiffness front tire | ||
| Unif. | 2134 | 30 | Vertical damping front tire | |||
| Unif. | 125,000 | 25,000 | 20 | Stiffness rear suspension | ||
| Unif. | 10,000 | 3000 | 30 | Damping rear suspension | ||
| Unif. | 19,000 | 3800 | 20 | Stiffness front suspension | ||
| Unif. | 1250 | 375 | 30 | Damping front suspension | ||
| M | Unif. | 300 | 15 | 5 | Motorcycle mass | |
| J | Unif. | 20 | Engine moment of inertia | |||
| Unif. | 15 | Engine coefficient of viscous friction | ||||
| Unif. | 15 | Brake coefficient of viscous friction |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsokanas, N.; Pastorino, R.; Stojadinović, B. A Comparison of Surrogate Modeling Techniques for Global Sensitivity Analysis in Hybrid Simulation. Mach. Learn. Knowl. Extr. 2022, 4, 1-21. https://doi.org/10.3390/make4010001
Tsokanas N, Pastorino R, Stojadinović B. A Comparison of Surrogate Modeling Techniques for Global Sensitivity Analysis in Hybrid Simulation. Machine Learning and Knowledge Extraction. 2022; 4(1):1-21. https://doi.org/10.3390/make4010001
Chicago/Turabian StyleTsokanas, Nikolaos, Roland Pastorino, and Božidar Stojadinović. 2022. "A Comparison of Surrogate Modeling Techniques for Global Sensitivity Analysis in Hybrid Simulation" Machine Learning and Knowledge Extraction 4, no. 1: 1-21. https://doi.org/10.3390/make4010001
APA StyleTsokanas, N., Pastorino, R., & Stojadinović, B. (2022). A Comparison of Surrogate Modeling Techniques for Global Sensitivity Analysis in Hybrid Simulation. Machine Learning and Knowledge Extraction, 4(1), 1-21. https://doi.org/10.3390/make4010001