
Asymmetric/Symmetric Glass-Fibre-Filled Polyamide 66 Gears—A Systematic Fatigue Life Study

 , ,
, ,
Abstract
1. Introduction
2. Methodology
3. Results and Discussions
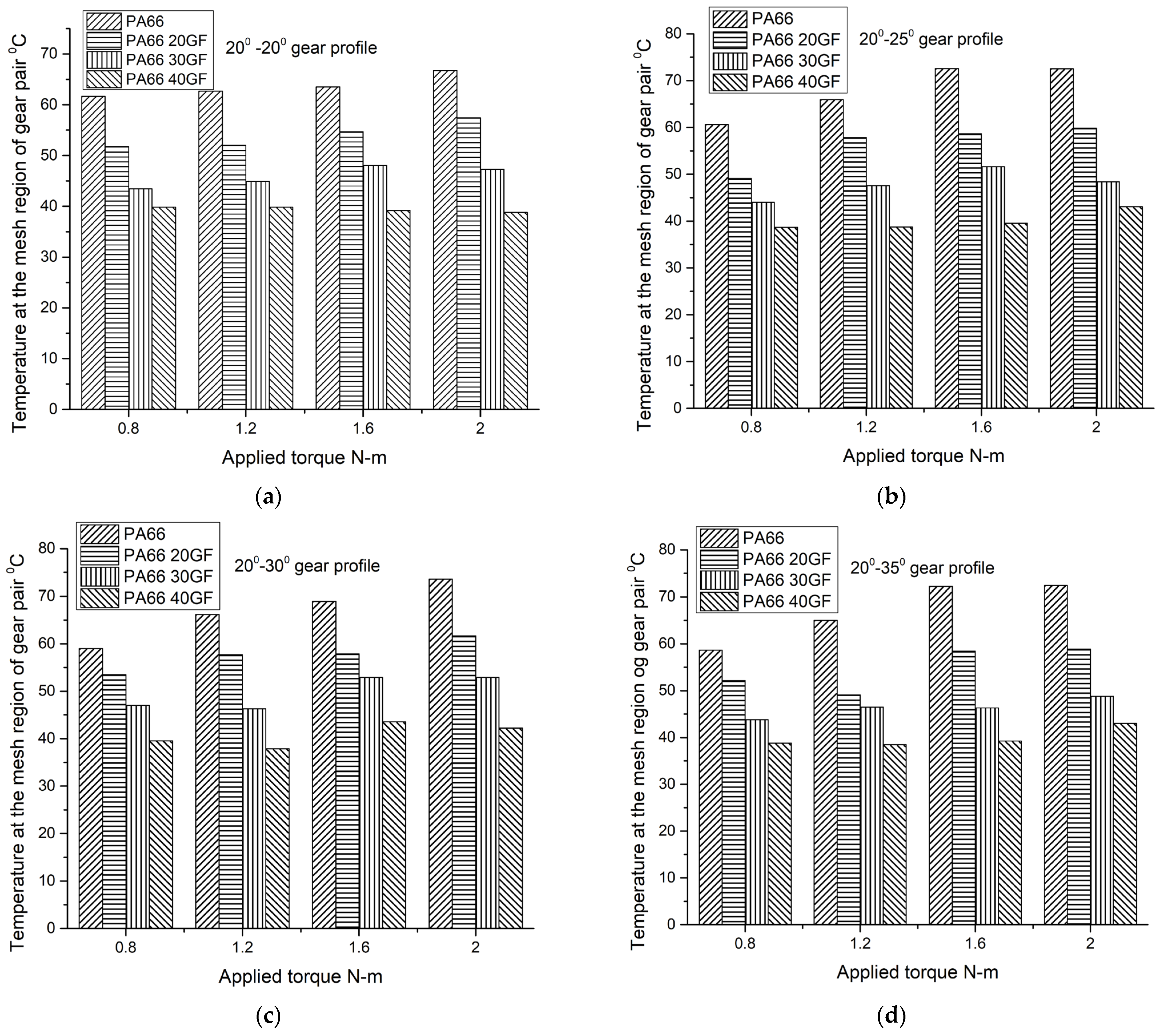
3.1. Thermal Behaviour of Gears
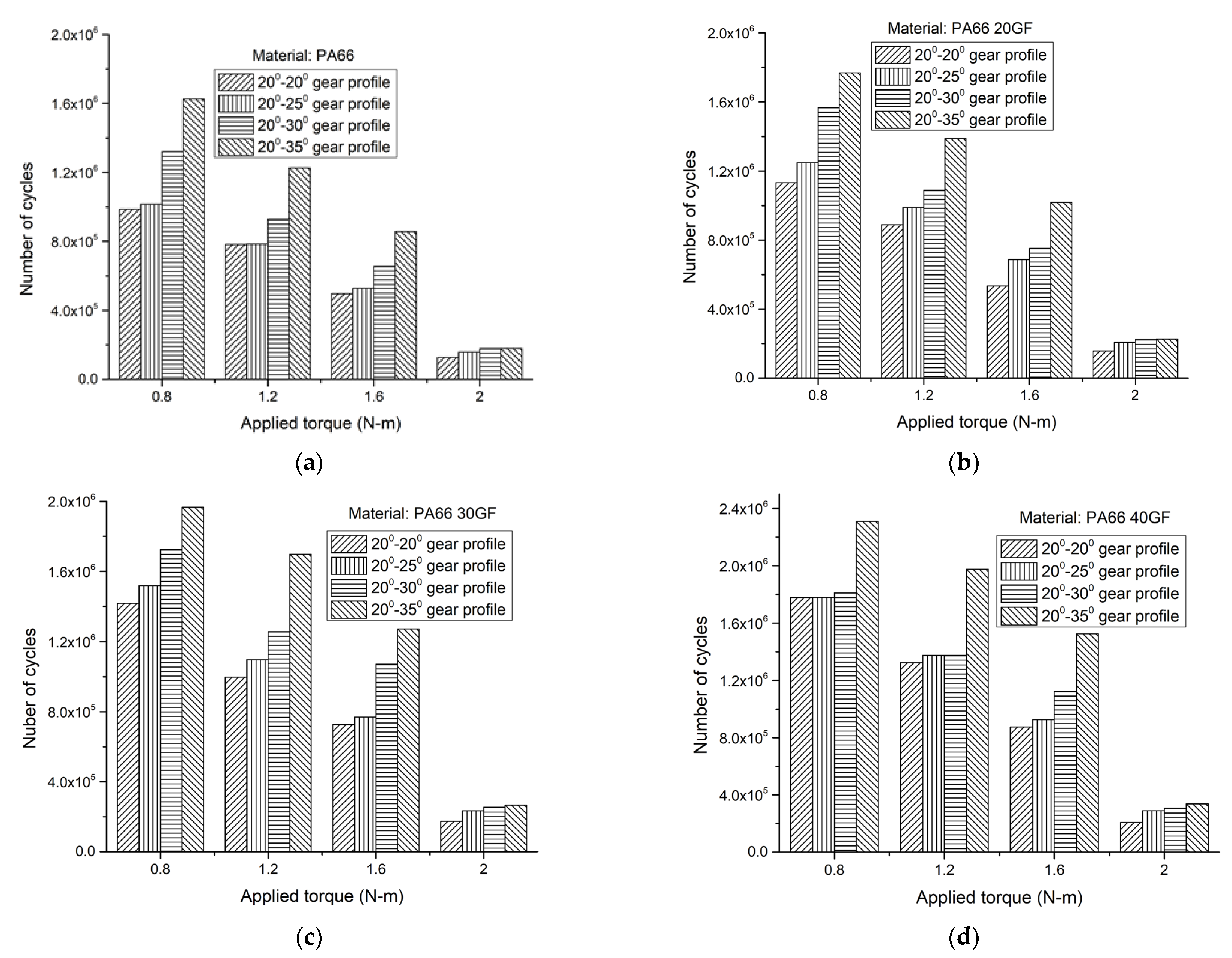
3.2. Gear Fatigue Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| PA | Polyamides; |
| PAGF | Glass-fibre-reinforced polyamides; |
| PA66/20GF | Polyamide 66 with 20 wt. % glass fibre; |
| PA66/30GF | Polyamide 66 with 30 wt. % glass fibre; |
| PA66/40GF | Polyamide 66 with 40 wt. % glass fibre; |
| 20°/20° | Pressure angle coast side/pressure angle drive side; |
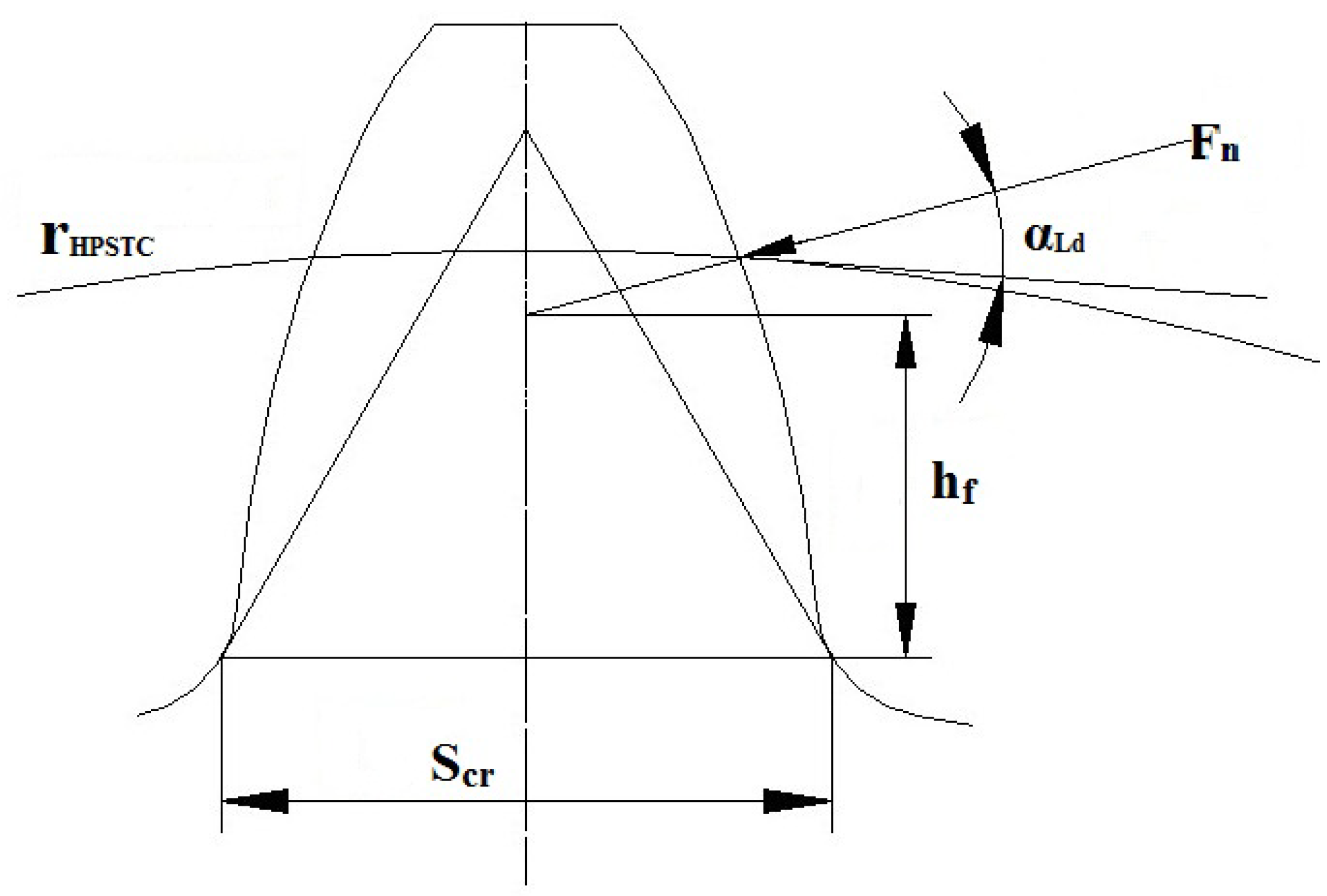
| Bending stress at the fillet region of gear tooth in N/mm2; | |
| m | Module, b- face width in mm; |
| hF | Height of bending moment arm in mm; |
| αLd | Load angle on the drive side in deg.; |
| Scr | Gear tooth thickness at critical section in mm; |
| HPSTC | Highest point of single-tooth contact; |
| r HPSTC | Radius at highest point of single-tooth contact. |
References
- Starzhinsky, V.E. Polymer Gears. In Encyclopedia of Tribology; Wang, Q.J., Chung, Y.-W., Eds.; Springer: Boston, MA, USA, 2013; pp. 2592–2602. ISBN 978-0-387-92897-5. [Google Scholar]
- Bravo, A.; Toubal, L.; Koffi, D.; Erchiqui, F. Gear fatigue life and thermomechanical behavior of novel green and bio-composite materials VS high-performance thermoplastics. Polym. Test. 2018, 66, 403–414. [Google Scholar] [CrossRef]
- Liu, G.; Wei, P.; Chen, K.; Liu, H.; Lu, Z. Polymer gear contact fatigue reliability evaluation with small data set based on machine learning. J. Comput. Des. Engineering 2022, 9, 583–597. [Google Scholar] [CrossRef]
- Hribersek, M.; Erjavec, M.; Hlebanja, G.; Kulovec, S. Durability testing and characterization of POM gears. Eng. Fail. Anal. 2021, 124, 105377. [Google Scholar] [CrossRef]
- Singh, P.K.; Siddhartha; Singh, A.K. An investigation on the thermal and wear behavior of polymer based spur gears. Tribol. Int. 2018, 118, 264–272. [Google Scholar] [CrossRef]
- Zorko, D. Investigation on the high-cycle tooth bending fatigue and thermo-mechanical behavior of polymer gears with a progressive curved path of contact. Int. J. Fatigue 2021, 151, 106394. [Google Scholar] [CrossRef]
- Singh, A.K.; Siddhartha; Singh, P.K. Polymer spur gears behaviors under different loading conditions: A review. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2018, 232, 210–228. [Google Scholar] [CrossRef]
- Zorko, D.; Tavčar, J.; Bizjak, M.; Šturm, R.; Bergant, Z. High cycle fatigue behaviour of autoclave-cured woven carbon fibre-reinforced polymer composite gears. Polym. Test. 2021, 102, 107339. [Google Scholar] [CrossRef]
- Černe, B.; Petkovšek, M.; Duhovnik, J.; Tavčar, J. Thermo-mechanical modeling of polymer spur gears with experimental validation using high-speed infrared thermography. Mech. Mach. Theory 2020, 146, 103734. [Google Scholar] [CrossRef]
- Md Ghazali, W.; Nafiz, D.; Sofian, A.; Siregar, J.; Aziz, I. A review on failure characteristics of polymer gear. MATEC Web Conf. 2017, 90, 01029. [Google Scholar] [CrossRef]
- Lu, Z.; Liu, H.; Zhu, C.; Song, H.; Yu, G. Identification of failure modes of a PEEK-steel gear pair under lubrication. Int. J. Fatigue 2019, 125, 342–348. [Google Scholar] [CrossRef]
- Senthilvelan, S.; Gnanamoorthy, R. Damping characteristics of unreinforced, glass and carbon fiber reinforced nylon 6/6 spur gears. Polym. Test. 2006, 25, 56–62. [Google Scholar] [CrossRef]
- Singh, A.K.; Singh, P.K.; Siddhartha; Yadav, S. A Comparative Analysis of Transmission Efficiency of Polyamide 66 Spur Gears Meshing with Similar and Dissimilar Gear Material. In Recent Advances in Mechanical Engineering; Lecture Notes in Mechanical Engineering; Muzammil, M., Chandra, A., Kankar, P.K., Kumar, H., Eds.; Springer: Singapore, 2021; pp. 291–297. [Google Scholar]
- Chandran, K.S.R. Mechanical fatigue of polymers: A new approach to characterize the SN behavior on the basis of macroscopic crack growth mechanism. Polymer 2016, 91, 222–238. [Google Scholar] [CrossRef]
- Hriberšek, M.; Kulovec, S. Thermal and durability characterization of polyacetal and polyamide gear pairs. J. Mech. Sci. Technol. 2021, 35, 3389–3394. [Google Scholar] [CrossRef]
- Trobentar, B.; Hriberšek, M.; Kulovec, S.; Glodež, S.; Belšak, A. Noise Evaluation of S-Polymer Gears. Polymers 2022, 14, 438. [Google Scholar] [CrossRef]
- Marimuthu, P.; Muthuveerappan, G. Investigation of load carrying capacity of asymmetric high contact ratio spur gear based on load sharing using direct gear design approach. Mech. Mach. Theory 2016, 96, 52–74. [Google Scholar] [CrossRef]
- Ml, P.; Goud, M. Static contact behavior of asymmetric spur gear. Mater. Today Proc. 2021, 47, 3095–3104. [Google Scholar] [CrossRef]
- Masuyama, T. Evaluation of load capacity of gears with an asymmetric tooth profile. Int. J. Mech. Mater. Eng. 2016, 9, 11. [Google Scholar] [CrossRef]
- Deng, G.; Nakanishi, T.; Inoue, K. Bending Load Capacity Enhancement Using an Asymmetric Tooth Profile. JSME Int. J. Ser. C 2003, 46, 1171–1177. [Google Scholar] [CrossRef][Green Version]
- Namboothiri, N.V.; Marimuthu, P. Investigation of fracture behaviour of asymmetric spur gear. Theor. Appl. Fract. Mech. 2021, 114, 102991. [Google Scholar] [CrossRef]
- Vaghela, P.; Prajapati, J. Parametric analysis of asymmetric involute spur gear tooth. Int. J. Powertrains 2019, 8, 292. [Google Scholar] [CrossRef]
- Mallesh, G. Parametric analysis of Asymmetric Spur Gear Tooth. In Proceedings of the 14th National Conference on Machines and Mechanis, Durgapur, India, 17–18 December 2009; p. 6. [Google Scholar]
- Demet, S.M.; Ersoyoğlu, A.S. An analysis of the effect of pressure angle change on bending fatigue performance in asymmetrical spur gears. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2021, 235, 2142–2150. [Google Scholar] [CrossRef]
- Senthilvelan, S.; Gnanamoorthy, R. Effect of gear tooth fillet radius on the performance of injection molded Nylon 6/6 gears. Mater. Des. 2006, 27, 632–639. [Google Scholar] [CrossRef]
- Lu, Z.; Liu, H.; Zhang, R.; Zhu, C.; Shen, Y.; Xin, D. The simulation and experiment research on contact fatigue performance of acetal gears. Mech. Mater. 2021, 154, 103719. [Google Scholar] [CrossRef]
- Kalin, M.; Kupec, A. The dominant effect of temperature on the fatigue behaviour of polymer gears. Wear 2017, 376–377, 1339–1346. [Google Scholar] [CrossRef]
- Zorko, D.; Kulovec, S.; Tavčar, J.; Duhovnik, J. Different teeth profile shapes of polymer gears and comparison of their performance. J. Adv. Mech. Des. Syst. Manuf. 2017, 11, JAMDSM0083. [Google Scholar] [CrossRef]
- Miler, D.; Hoić, M. Optimisation of cylindrical gear pairs: A review. Mech. Mach. Theory 2021, 156, 104156. [Google Scholar] [CrossRef]
- Mao, K. A new approach for polymer composite gear design. Wear 2007, 262, 432–441. [Google Scholar] [CrossRef]
- Singh, A.K.; Sharma, S. Thermal and Wear Behavior of Glass Fiber-Filled Functionally Graded Material-Based Polyamide 66 Spur Gears Manufactured by a Novel Technique. J. Tribol. 2018, 140, 021601. [Google Scholar] [CrossRef]
- İmrek, H. Performance improvement method for Nylon 6 spur gears. Tribol. Int. 2009, 42, 503–510. [Google Scholar] [CrossRef]
- Düzcükoğlu, H. Study on development of polyamide gears for improvement of load-carrying capacity. Tribol. Int. 2009, 42, 1146–1153. [Google Scholar] [CrossRef]
- Mertens, A.J.; Senthilvelan, S. Effect of Mating Metal Gear Surface Texture on the Polymer Gear Surface Temperature. Mater. Today Proc. 2015, 2, 1763–1769. [Google Scholar] [CrossRef]
- Mertens, A.J.; Senthilvelan, S. Durability of polymer gear-paired with steel gear manufactured by wire cut electric discharge machining and hobbing. Int. J. Precis. Eng. Manuf. 2016, 17, 181–188. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear Specifications | Values |
|---|---|
| Gear teeth | 18 |
| Module | 2 |
| Face width of gear (mm) | 6 |
| Coast-side pressure angle (deg) | 200 |
| Drive-side pressure angle (deg) | 20° to 35° in steps of 5° |
| Property, Units | Values |
|---|---|
| Density, g/cm3 | 2.50 |
| Modulus of elasticity, GPa | 73 |
| Fiber diameter, μm | 8 |
| Tensile strength, MPa | 3250 |
| Temperature at Mating Zone | Gear Material | ||||
|---|---|---|---|---|---|
| PA66 | PA66/20GF | PA66/30GF | PA66/40GF | ||
| Gear’s profile (Deg) | 20°–20° | increased by 7.64% | increased by 9.93% | increased by 8.04% | No substantial change |
| 20°–25° | increased by 16.37% | increased by 17.91% | increased by 9.13% | increased by 10.26% | |
| 20°–30° | increased by 19.85% | increased by 13.25% | increased by 11.15% | increased by 6.26% | |
| 20°–35° | increased by 19.10% | increased by 11.40% | increased by 10.29% | increased by 9.74% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dhaduti, S.C.; Sarganachari, S.G.; Patil, A.Y.; Budapanahalli, S.H.; Kumar, R. Asymmetric/Symmetric Glass-Fibre-Filled Polyamide 66 Gears—A Systematic Fatigue Life Study. J. Compos. Sci. 2023, 7, 345. https://doi.org/10.3390/jcs7090345
Dhaduti SC, Sarganachari SG, Patil AY, Budapanahalli SH, Kumar R. Asymmetric/Symmetric Glass-Fibre-Filled Polyamide 66 Gears—A Systematic Fatigue Life Study. Journal of Composites Science. 2023; 7(9):345. https://doi.org/10.3390/jcs7090345
Chicago/Turabian StyleDhaduti, Sandeep C., S. G. Sarganachari, Arun Y. Patil, Shridhar H. Budapanahalli, and Raman Kumar. 2023. "Asymmetric/Symmetric Glass-Fibre-Filled Polyamide 66 Gears—A Systematic Fatigue Life Study" Journal of Composites Science 7, no. 9: 345. https://doi.org/10.3390/jcs7090345
APA StyleDhaduti, S. C., Sarganachari, S. G., Patil, A. Y., Budapanahalli, S. H., & Kumar, R. (2023). Asymmetric/Symmetric Glass-Fibre-Filled Polyamide 66 Gears—A Systematic Fatigue Life Study. Journal of Composites Science, 7(9), 345. https://doi.org/10.3390/jcs7090345