1. Introduction
With the rapid advancement of wireless communication technologies, the demand for ubiquitous, reliable, and high-capacity wireless services has surged to meet the requirements of emerging applications, including autonomous driving, smart cities, and the Internet of Things (IoT) [
1].
Integrated sensing and communication (ISAC) has recently emerged as a groundbreaking framework that facilitates the concurrent design and operation of communication and sensing functions over a shared wireless infrastructure and spectrum [
2]. By enabling the reuse of hardware components and spectral resources, ISAC substantially improves spectral efficiency, reduces latency, and simplifies system architecture. This integrated approach is expected to empower diverse applications such as high-accuracy localization, environmental sensing, and secure vehicular communication. Concurrently, unmanned aerial vehicles (UAVs) have attracted significant interest from both research and industry sectors owing to their distinctive advantages, including high mobility, flexible deployment capabilities, and inherent LoS links [
3]. UAVs are particularly advantageous in dynamic or remote environments where traditional ground-based infrastructure is unavailable or suboptimal.
The convergence of ISAC and UAV technologies opens up promising opportunities for enhancing system-level performance across multiple dimensions. On one hand, UAVs can serve as mobile base stations or airborne sensors to improve the coverage and reliability of wireless networks [
4]. On the other hand, the mobility of UAVs can be intelligently exploited to optimize sensing geometry, reduce communication blockage, and dynamically adjust service provisioning. Despite its advantages, the realization of UAV-enabled ISAC systems also entails significant technical challenges [
5]. These include accurate user tracking in dynamic environments, robust and secure communication under uncertain channel conditions, and the design of efficient algorithms for trajectory planning, beamforming, and power allocation [
6]. Addressing these challenges is essential to fully unlock the potential of UAV-assisted ISAC and to meet the stringent performance requirements of future wireless ecosystems.
In the field of ISAC, numerous studies have investigated the joint design of radar and communication functionalities to enhance overall system performance [
7,
8,
9,
10,
11,
12]. For instance, Ref. [
7] examined a dual-function multi-input multi-output (MIMO) system that serves both radar sensing and multi-user communication, where a unified beamforming strategy was developed to simultaneously meet the requirements of both tasks. In terms of sensing performance, Ref. [
8] focused on MIMO beamforming design under joint radar and communication constraints, employing the Cramér–Rao bound (CRB) as the key metric for target estimation accuracy, considering both point and extended targets. Moreover, energy-efficient beamforming for ISAC was studied in [
9], where the waveform was optimized to support multi-user communication and sensing within power and performance limits. A Pareto-based optimization framework was introduced to balance communication-centric and sensing-centric energy efficiency, providing insights into the trade-off between these competing objectives.
Extending ISAC paradigms to UAV-enabled platforms, numerous studies have explored the integrated design of UAV trajectory planning and beamforming to simultaneously enhance communication quality and sensing accuracy. For example, Wang et al. [
13] formulated a network utility maximization framework in a multi-UAV system supporting dual radar–communication functionality. To manage the complexity of joint UAV positioning, user association, and power allocation, a decomposition-based solution was proposed. Similarly, Zhang et al. [
14] designed a comprehensive strategy integrating UAV trajectory planning, user association, and beamforming to maximize the weighted communication sum-rate while meeting radar detection constraints. In another contribution, Cheng et al. [
15] investigated a coordinated approach to UAV trajectory optimization and transmit beamforming in networked ISAC scenarios tailored to low-altitude economic environments. Meng et al. [
16] further developed a throughput-oriented optimization algorithm for UAV-assisted ISAC systems by jointly refining UAV flight paths and allocating communication resources efficiently. In the broader context of space–air–ground integrated networks, Mao et al. [
17] studied UAV-assisted communication strategies aimed at mobile user tracking and dynamic beamforming. Meanwhile, Li et al. [
18] tackled the challenge of covert communications under stringent energy constraints in ISAC systems by proposing a deep reinforcement learning-based framework, which jointly optimized UAV trajectory and bandwidth allocation. Furthermore, Pan et al. [
19] formulated a joint optimization problem for UAV path planning and resource distribution, with the objective of minimizing the Cramér–Rao lower bound for target localization while maintaining user-specific quality-of-service requirements. To solve this, they proposed a pattern search algorithm for UAV path tracking and utilized the Hungarian algorithm for dynamic user association. Additionally, an alternating optimization framework, combined with successive convex approximation, was introduced to iteratively adjust power and bandwidth allocation. Likewise, Al-habob et al. [
20] presented a predictive beamforming architecture tailored for secure ISAC in environments with multiple mobile aerial eavesdroppers. They designed a maximum likelihood-based channel estimation technique that leverages echo signals to jointly infer the parameters of each UAV, effectively addressing physical-layer security risks.
Ensuring physical layer security in the presence of eavesdroppers remains a pivotal challenge in UAV-assisted ISAC systems [
21]. For example, Ref. [
22] developed a secure joint transmit beamforming scheme for ISAC to maximize the secrecy sum-rate while adhering to radar signal-to-noise ratio (SNR) requirements. However, their study did not take into account the mobility of users, which restricts its effectiveness in time-varying or dynamic application scenarios. Likewise, Ref. [
23] addressed PLS enhancement where the sensing target may act as a potential eavesdropper. Yet, their work is limited to a single-eavesdropper context, lacking investigation into more generalized or multi-adversary conditions. Moreover, Ref. [
24] presented a real-time UAV trajectory optimization method for secure ISAC communication, but assumed omnidirectional transmission, thereby neglecting the additional secrecy and efficiency gains that can be achieved through directional beamforming strategies and detailed modeling of antenna radiation characteristics.
To address the limitations observed in prior studies, this work explores a dynamic scenario involving mobile users and introduces a unified optimization framework that jointly designs robust beamforming and UAV trajectory for an ISAC-enabled UAV system. The objective is to enhance the secrecy rate of communications between the UAV and multiple legitimate users, while simultaneously suppressing the risk of information leakage to potential eavesdroppers. The proposed optimization problem incorporates several practical constraints, including UAV mobility restrictions, total transmission power limitations, and sensing accuracy requirements for multiple targets. Due to the non-convex nature of the formulated problem, an efficient alternating optimization algorithm is proposed. In this framework, the robust beamforming component is addressed using a successive convex approximation approach, whereas the UAV trajectory is refined via constrained optimization by a linear approximation technique. This hybrid method facilitates the convergence toward a high-quality, near-optimal solution. Extensive simulation results validate the effectiveness and superiority of the proposed approach in comparison with existing benchmark schemes.
In this work, we use the following notation conventions. The symbols and represent the transpose and Hermitian transpose (conjugate transpose) of a matrix, respectively. The operator stands for the absolute value when applied to a scalar, and the modulus when applied to a complex number. The Euclidean norm (-norm) and Frobenius norm of vectors or matrices are denoted as and , respectively. For a square matrix, its trace is indicated by . The set of all complex-valued matrices of dimension is expressed as . The real part of a complex variable is written as . The expectation operator in the statistical sense is denoted by .
2. System Model
As illustrated in
Figure 1, we consider a UAV-enabled secure ISAC system, where a UAV transmits communication signals and simultaneously receives echo signals from the sensing targets, while simultaneously mitigating signal exposure to the eavesdropper. This dual-functional operation leverages the UAV’s mobility and flexible deployment capabilities to meet both performance and security requirements in dynamic wireless environments.
The UAV is assumed to fly at a fixed altitude H, whereas all ground nodes, including users, targets, and the eavesdroppers, are located at ground level (i.e., height zero). At time slot t, the UAV’s position is given by , and the location of user is denoted as . For simplicity, the positions of the target and eavesdropper are assumed to be static, denoted by and , respectively.
The total operation time T is divided into Q equal time slots, each with duration . This duration is assumed to be short enough to ensure that the channel state information (CSI) for both radar sensing and communication remains approximately constant and can be accurately estimated using pilot signals.
2.1. Mobility Model of UAV
At time slot
t, the UAV is allowed to maneuver freely in the horizontal plane, with a displacement distance denoted by
, where
represents the maximum displacement that the UAV can achieve within one time slot. This maximum displacement is determined by the UAV’s maximum flight speed and the duration of each time slot. Accordingly, the UAV’s trajectory can be modeled as a cumulative sum of its successive horizontal displacements, which is mathematically expressed as follows:
where
denotes the horizontal displacement vector at time slot
t, with
and
representing the movement components along the
x- and
y-axes, respectively. The magnitude of the horizontal displacement satisfies the following constraint:
2.2. Transmit Antenna Model
The UAV is equipped with a uniform planar array (UPA) deployed on the XOY plane for signal transmission. The array consists of antenna elements along the x-axis and antenna elements along the y-axis, resulting in a total of elements. The corresponding steering vector is denoted by , which characterizes the spatial response of the antenna array towards the target direction. Specifically, the steering vector is parameterized by the elevation angle and the azimuth angle , which are determined by the relative positions of the UAV located at and the k-th user located at .
The direction-of-arrival (DoA) information, including both elevation and azimuth angles, is calculated based on the relative geometry between the UAV and the
k-th target as follows:
The steering vector of the UPA can be expressed as the Kronecker product of the steering vectors along the
x- and
y-axes, given by the following:
where
denotes the inter-element spacing normalized by the carrier wavelength, ensuring phase coherence across the array elements.
2.3. Channel Model
In this work, the air-to-ground (A2G) channel between the UAV and the
k-th ground user is modeled based on a widely-adopted probabilistic framework, following the methodology presented in [
25]. This model jointly considers both Line-of-Sight and Non-Line-of-Sight (NLOS) propagation conditions, which are critical for accurately capturing the characteristics of UAV-ground communications under various environments.
At each time slot
t, the average path loss
is expressed as a weighted combination of the LOS and NLOS path losses, given by the following:
where
and
represent the instantaneous path loss under LOS and NLOS conditions, respectively. Specifically, these path losses can be formulated as follows:
where
and
denote the additional attenuation factors accounting for shadowing, scattering, and other environment-specific losses beyond the free-space path loss.
The probability of establishing an LOS link is modeled as a function of the UAV’s elevation angle using a modified sigmoid function, which effectively captures the statistical variation in LOS probability with respect to different propagation conditions:
where
denotes the elevation angle at time slot
t, while
and
are environment-dependent constants that characterize the urban, suburban, or rural scenarios.
Consequently, the A2G channel vector between the UAV and the
k-th ground user at time slot
t can be expressed as follows:
where
denotes the steering vector corresponding to the current azimuth and elevation angles, as previously defined.
2.4. ISAC Model
Following the ISAC beamforming matrix modeling approach proposed in [
7], we adopt a unified framework in which the joint transmitter solely employs precoded communication symbols for simultaneous sensing and communication operations.
Under this modeling paradigm, as illustrated in
Figure 2, the transmitted signals are pre-processed by a carefully designed beamforming matrix that serves both communication and sensing functionalities, thereby enabling efficient resource utilization while maintaining the integrated system performance.
where
contains
K unit-power data streams intended for the users with
. The matrix
is the beamformer for communication and radar sensing, where
represents the
i-th column of matrix
W.
2.4.1. Communication Metrics
Based on the aforementioned communication channel model, the received signal of the
k-th user can be written as follows:
where
denotes the additive white Gaussian noise (AWGN). Thus, the Signal-to-Interference-plus-Noise ratio (SINR) of the
k-th communication user can be calculated as
And the communication rate for the
k-th ground user can be calculated as
In addition to reliably serving legitimate GUs, the UAV-enabled wireless communication system must also address potential security vulnerabilities posed by passive eavesdroppers attempting to intercept confidential information. Assuming that the spatial location of an eavesdropper is known or can be estimated, the A2G channel from the UAV to the eavesdropper can be modeled in a manner analogous to that of legitimate users. Specifically, the channel vector between the UAV and the eavesdropper at time slot
t is represented as follows:
Let
denote the beamforming vector designed for ground user
k. The SINR at the eavesdropper when attempting to decode the message intended for user
k can be expressed as follows:
where
denotes the AWGN power at the eavesdropper. The numerator represents the power of the confidential signal as received by the eavesdropper, while the denominator accounts for the total interference from other users’ signals as well as background noise.
Based on this SINR, the eavesdropper’s achievable data rate for decoding the signal of user
k is given by the following:
To measure the communication security performance, the instantaneous secrecy rate of ground user
k at time
t is defined as the difference between the legitimate communication rate and the maximum achievable rate at the eavesdroppers:
where the positive secrecy rate implies successful protection of confidential information, while a non-positive secrecy rate indicates a potential breach of communication privacy. In the subsequent analysis, we will demonstrate that this secrecy rate formulation provides an effective and tractable performance metric for constraining the information leakage to potential eavesdroppers.
2.4.2. Sensing Metric
In the considered ISAC-UAV system, a dual-functional transmit waveform is employed to simultaneously support both communication and radar sensing tasks. The transmitted signal is exploited to illuminate the target region of interest, requiring sufficient directional energy to ensure reliable detection performance. To characterize this energy distribution, we define the transmit signal covariance matrix as follows:
where the matrix
captures the spatial power distribution of the transmitted signal and plays a key role in shaping the sensing beam pattern. To evaluate the system’s sensing performance toward the
m-th target, the beam pattern gain at time slot
t is defined as follows [
14,
26,
27]:
where
represents the steering vector toward the direction of the
m-th target. The resulting beampattern gain quantifies the amount of energy directed along the target’s direction, serving as a fundamental indicator of radar detection capability in the integrated sensing and communication framework.
4. Simulation Results
To validate the performance of the proposed secure ISAC-UAV framework, extensive simulations are carried out using the system parameters detailed in
Table 1. The UAV is configured with a 4 × 4 uniform planar antenna array and maintains a constant flight altitude of 100 m throughout a mission duration of 30 s. This time span is uniformly divided into 30 discrete intervals for analysis.
System performance is evaluated in terms of the achievable secrecy sum-rate under various conditions, including transmit power, number of users, radar sensing thresholds, and key statistical characteristics such as the mean and standard deviation.
The initial UAV position is randomly assigned but constrained to be within a reasonable distance from legitimate users. If the initial location is set too far from the users, the secrecy sum-rate may fall below zero during the initial time slots, indicating the inability to establish effective secure communication due to significant signal leakage to eavesdroppers. To facilitate a more comprehensive performance analysis, three scenarios with different numbers of users are designed. All optimization procedures are reproducible using either CVX solvers in MATLAB 2020b or CVXPY in Python 3.11.0.
To investigate the performance of the beamforming optimization stage, we first consider a single time slot scenario in which only the beamforming matrix is optimized. Multiple legitimate users are placed at a horizontal distance of 50 m from the UAV, while sensing targets and eavesdroppers are positioned at a horizontal distance of 150 m. The performance of the beamforming algorithm is analyzed by varying the transmit power and the radar sensing threshold constraints.
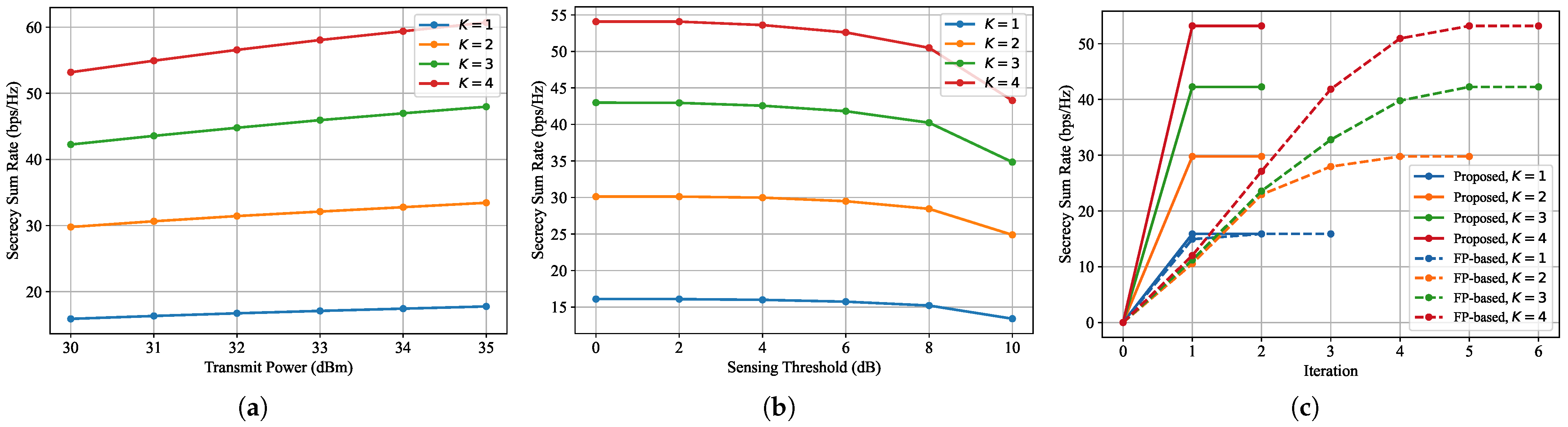
Figure 5a illustrates the relationship between the total transmit power and the achievable secrecy sum-rate under different numbers of legitimate users (
). The transmit power ranges from 30 dBm to 35 dBm, and the secrecy performance is evaluated using the proposed joint robust beamforming optimization algorithm. It can be observed that the secrecy sum-rate increases monotonically with the transmit power across all cases. This is because higher transmit power enhances the signal strength at the legitimate users, thereby improving the achievable communication rates. Additionally, the performance is significantly influenced by the number of ground users. When
, the system achieves the lowest sum-rate due to limited degrees of freedom in beamforming. As
K increases, the sum-rate rises steadily, with the case of
achieving the highest throughput. This is attributed to multi-user diversity, where more users provide greater flexibility in beam allocation. However, this also introduces additional challenges in interference management and secrecy protection. The results in this figure verify the scalability and robustness of the proposed framework, demonstrating its ability to support an increasing number of users without significant degradation in secrecy performance, especially when sufficient power is provisioned.
Figure 5b illustrates the impact of the radar sensing threshold Γ on the achieved secrecy sum-rate under different numbers of legitimate users. As the sensing requirement becomes increasingly stringent, the system is compelled to allocate greater transmit power and beamforming resources toward the sensing direction. Consequently, it becomes essential to configure the minimum transmit beamforming gain according to specific scene requirements to achieve a balanced trade-off between sensing quality and communication performance. The figure reveals a clear trend: as Γ increases from 0 to 10 dB, the secrecy sum-rate degrades gradually across all user configurations. This is due to the increased power and spatial focus required to satisfy the sensing constraint, which in turn limits the degrees of freedom available for optimizing secure communication. Notably, the performance degradation is more pronounced when the number of users
K is larger. For instance, in the case of
, the secrecy sum-rate drops from approximately 54 bps/Hz at Γ = 0 dB to around 44 bps/Hz at Γ = 10 dB. Similarly, for
, the sum-rate drops from about 16 bps/Hz to below 14 bps/Hz over the same range. This trend underscores the trade-off between sensing reliability and communication security in UAV-enabled ISAC systems. Overall, the results highlight the importance of jointly optimizing sensing and communication under practical constraints. The proposed algorithm effectively balances both objectives, maintaining robust secrecy rates even under tightening sensing requirements.
Figure 5c depicts the convergence performance of the proposed robust beamforming algorithm in comparison to the traditional fractional programming (FP)-based method, which is detailed in
Appendix A. The results are shown for varying numbers of ground users
, with the secrecy sum-rate (in bps/Hz) plotted over successive iterations. It can be observed that the proposed algorithm achieves rapid and stable convergence within two iterations across all tested user configurations. For instance, when
, the proposed method converges to a secrecy sum-rate of approximately 54 bps/Hz after just one step. Similarly, for
, the performance stabilizes at around 16 bps/Hz. In contrast, the FP-based scheme requires more iterations to achieve convergence. The rapid convergence of the proposed algorithm can be attributed to the application of the SCA method, which linearizes a part of the objective function via first-order Taylor expansion to construct a convex lower bound. Moreover, since the iterative process progressively reduces the interference and noise terms, initializing the intermediate optimization variables as zero vectors provides a favorable starting point, further accelerating convergence. The figure underscores the fast convergence and robustness of the proposed algorithm, making it suitable for real-time UAV-enabled ISAC deployments, especially in dynamic environments.
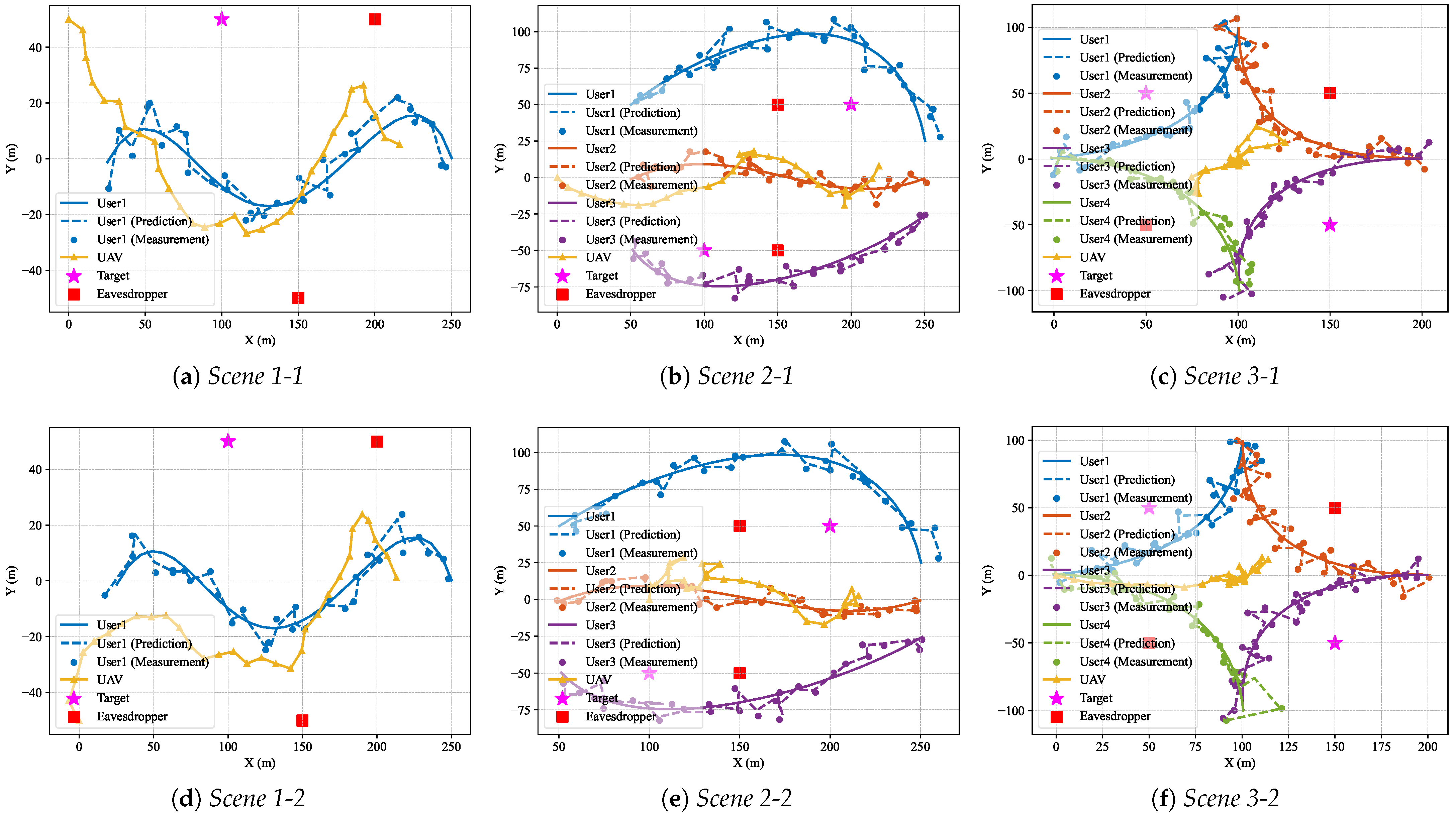
Figure 6 illustrates the UAV flight trajectories and user movements in three secure ISAC scenarios. The system aims to maximize the secrecy sum-rate while guaranteeing radar sensing performance and minimizing exposure to the eavesdropper.
Figure 6a illustrates the actual trajectory of a single user (solid line), the predicted positions (dashed line), and the measured positions (scattered markers) in
Scene 1. The UAV trajectory, initialized at (0, 50, 100) and depicted by a yellow line with triangular markers, dynamically adapts to the user’s predicted positions. It hovers near optimal locations that enhance secure communication while minimizing signal leakage to the eavesdropper (red square) and maintaining sufficient sensing performance for the designated target (magenta star). It can be observed that the UAV gradually moves closer to the legitimate user during the optimization process to improve the overall secrecy rate. Eventually, the UAV’s trajectory tends to align with the user’s movement pattern.
Figure 6d presents another UAV trajectory in
Scene 1, where the UAV starts from a different randomly initialized position (0, −50, 100). Despite this variation, the optimization process over time leads to a similar trajectory in the final time slots, demonstrating the robustness of the proposed approach to different initializations.
Figure 6b illustrates the UAV trajectory in
Scene 2, where three legitimate users are located at (50, −50, 0), (50, 0, 0), and (50, 50, 0). The UAV is initialized at (0, 0, 100) and optimizes its trajectory to serve all users fairly while maintaining secure communication in the presence of two eavesdroppers and ensuring sufficient sensing quality for two targets. The UAV adaptively balances its position between the three users, as reflected in its curved flight path, which avoids proximity to the eavesdroppers (red squares) and remains within effective sensing range of the targets (magenta stars).
Figure 6e presents the same scenario as in
Figure 6b, but with a different UAV initialization at (100, 0, 100). Although the initial trajectory differs significantly, the UAV eventually converges to a similar serving pattern, positioning itself closer to the users and away from high-risk regions. This again demonstrates the adaptability and robustness of the proposed trajectory optimization method under varying initial conditions.
Figure 6c corresponds to
Scene 3, where four users are located at (0, 0, 0), (100, 100, 0), (100, −100, 0), and (200, 0, 0). The UAV starts from (100, 0, 100) and is required to jointly serve all users while satisfying security and sensing constraints. Compared with previous scenarios, the UAV path in this case exhibits more dynamic and distributed movement due to the wider spatial distribution of users. The trajectory is shaped to prioritize both the central users and those located at the edges, ensuring balanced performance.
Figure 6f shows the result of
Scene 3 with a different UAV initial position at (0, 0, 100). Similar to previous observations, although the UAV starts from a suboptimal location, the optimization algorithm quickly adjusts its path, steering the UAV towards more favorable positions that optimize the secrecy sum-rate and radar sensing performance. The final trajectory aligns closely with the distribution of user positions, confirming the effectiveness of the proposed approach under complex and asymmetrical user layouts.
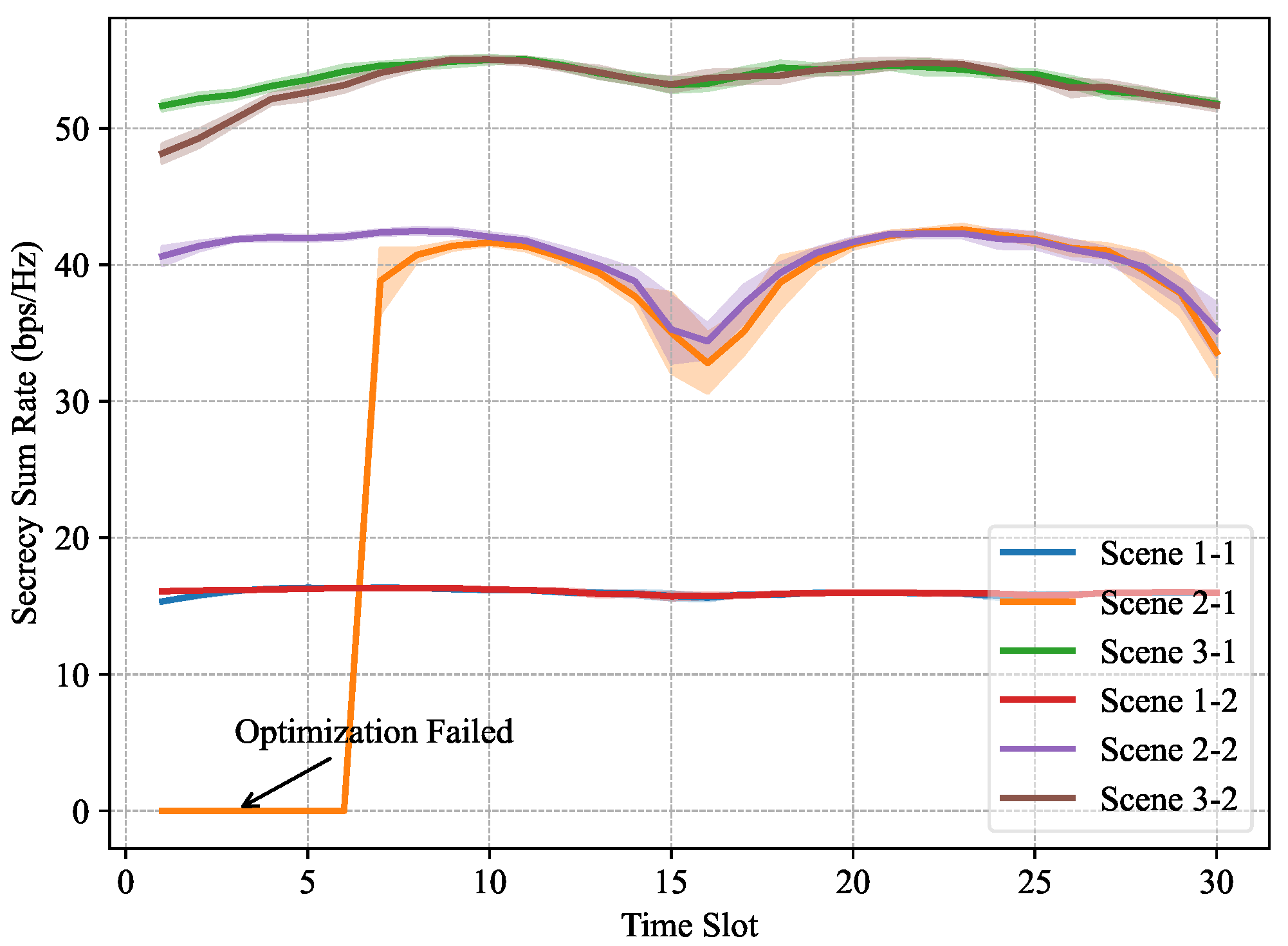
Figure 7 presents the secrecy sum-rate evolution across all 30 time slots under six different configurations, covering three scene settings and two UAV initial positions per scene. The figure highlights the strong correlation between the UAV’s proximity to legitimate users and the achieved secrecy rate: scenarios where the UAV quickly converges toward users (e.g.,
Scene 3-1 and
Scene 3-2) consistently yield higher secrecy performance. In
Scene 2-1, the secrecy rate is initially negative due to suboptimal UAV positioning, resulting in excessive signal leakage to eavesdroppers. This phase is labeled as “Optimization Failed” in the figure. However, the algorithm effectively learns a secure trajectory over subsequent slots, and the performance stabilizes to a competitive level. This behavior demonstrates the resilience of the proposed framework, even under poor initial conditions. Additionally, it is evident that differences in the UAV’s initial position only affect the early stage of the optimization. As time progresses, the optimized trajectories across the two variants of each scene converge to similar secrecy performance levels, indicating that the proposed method consistently finds effective flight paths regardless of initialization.
5. Conclusions
In this article, we present a novel unified optimization framework that jointly addresses robust beamforming and UAV trajectory planning for a secure ISAC-UAV system involving mobile users. The overall optimization is decoupled into two interrelated subproblems: the robust beamforming subproblem is tackled using the SCA combined with the SDR approach, while the UAV trajectory subproblem is handled by employing the derivative-free COBYLA algorithm. Simulation results reveal that the proposed approach substantially outperforms conventional benchmark schemes in terms of secrecy sum-rate and convergence efficiency, all while satisfying both radar sensing requirements and UAV mobility constraints. Furthermore, numerical evaluations confirm that the proposed framework achieves near-optimal performance under practical system limitations, offering considerable improvements in secrecy capabilities while preserving high-fidelity sensing performance.
While this study presents promising results, it is currently limited to simulations based on synthetic data and idealized channel models. Future work should validate the proposed framework under real-world deployment conditions, considering practical factors such as hardware impairments and channel measurement noise. The current model also does not account for dynamic parameters, such as user velocity, propagation delay, and Doppler shifts, all of which are critical in high-mobility environments. Incorporating these parameters into the mobility and sensing models would improve the realism and practical relevance of the proposed ISAC-UAV system design.
In particular, the proposed framework holds significant potential for real-world applications in scenarios requiring secure communications and high-accuracy sensing. For example, it can be deployed in military surveillance missions to support covert information transmission and precise target detection in contested environments; in border patrol operations to simultaneously monitor intrusion activities and maintain encrypted communication links and in disaster response scenarios to ensure confidential data exchange and environmental sensing under infrastructure-damaged conditions. These applications highlight the importance of integrated, secure, and adaptive ISAC-UAV designs in future wireless systems.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}