
A Semi-Autonomous Aerial Platform Enhancing Non-Destructive Tests

 ,
,  ,
,  and
and
Abstract
1. Introduction
2. Related Works
2.1. In-Contact Inspections
2.2. Teleoperation and Shared-Control
2.3. Contribution
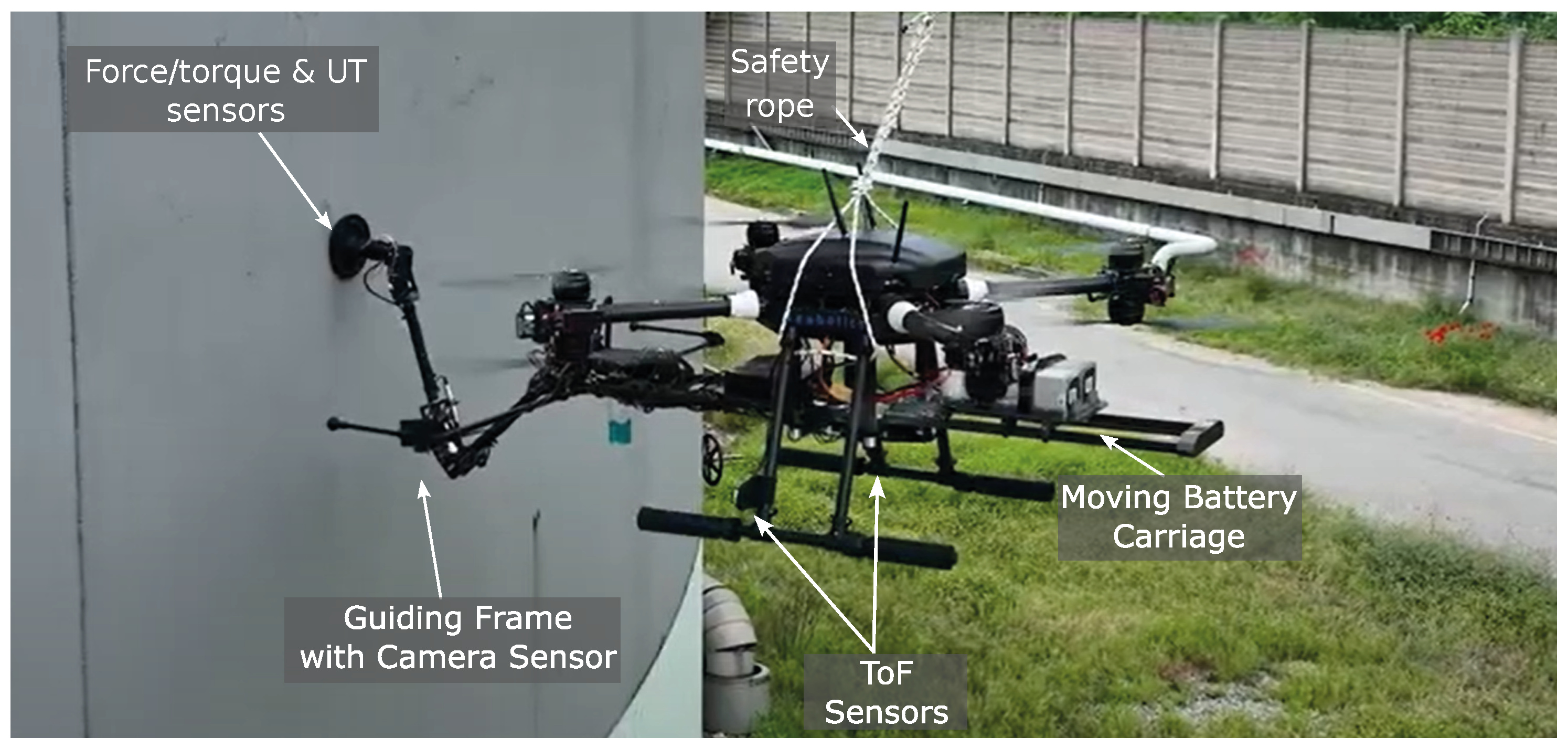
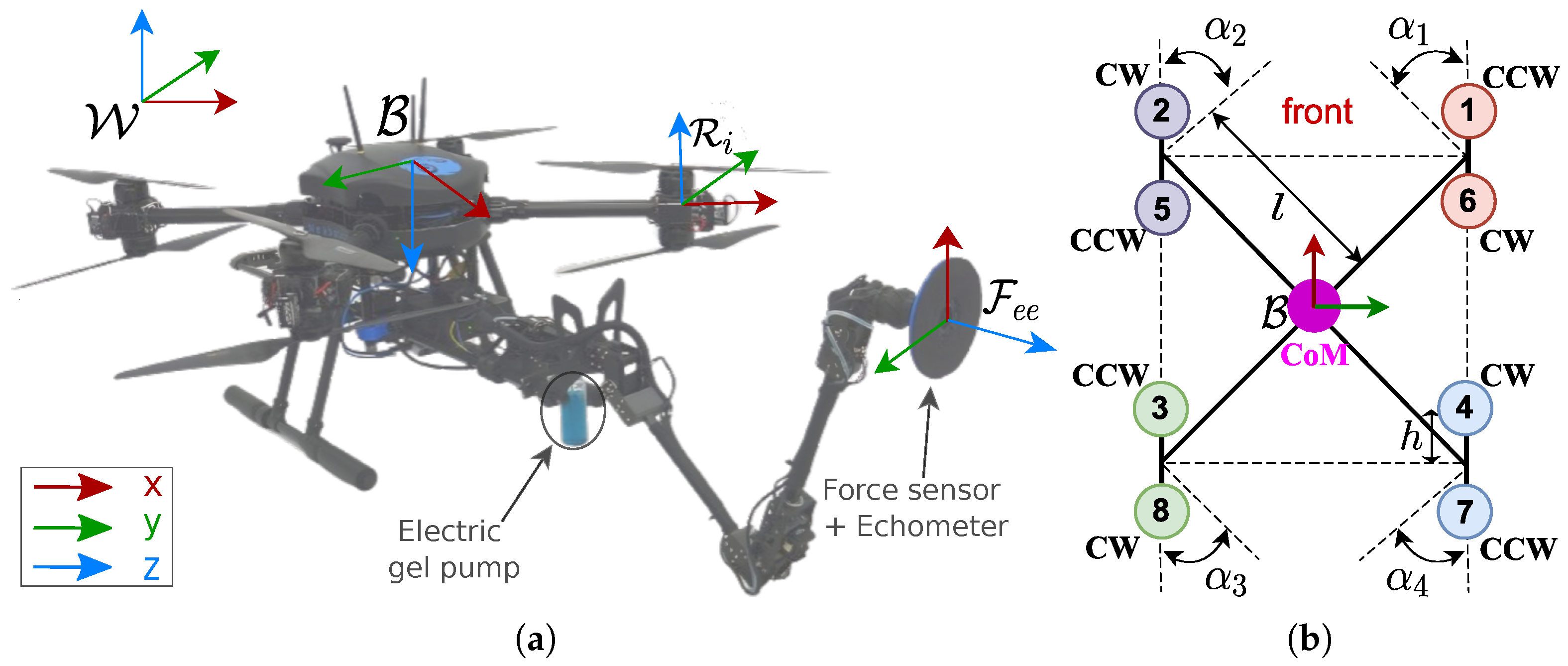
- A multi-functional platform design: The paper’s primary contribution relies on the proposed platform design (see Figure 1). In the past, it has been presented solely in operational contexts. This paper now delves into the comprehensive detailing of its constituent components and the seamless hardware and software integration. This shift in focus is crucial, as it allows for a thorough exploration of how each platform component contributes to its overall functionality and performance. The aerial robot comprises an omnidirectional UAV combined with a fully actuated robotic arm. A key innovation is the mass-shifting mechanism, which dynamically and autonomously adjusts the drone’s CoM when the robotic arm extends. This feature ensures stability and maneuverability, which are crucial for maintaining control during contact-based inspections.
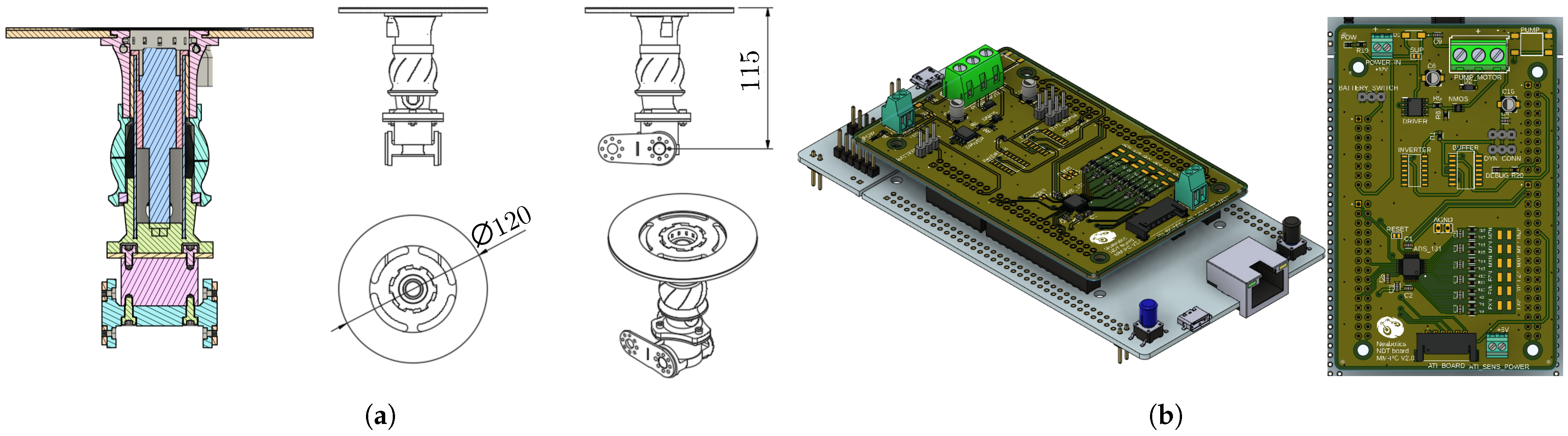
- Different hardware and software enhancements: The platform’s hardware improvements include enhanced sensor suites for improved environmental awareness and task execution. The changes involve both sensors responsible for the navigation and the introduction of a different force sensor on the E-E tip. This is the reason at the basis of the new printed circuit board (PCB) development whose features are detailed in Section 3.2. On the software front, refinements to the control algorithms and the introduction of a robust state machine architecture ensure smoother operation and increased reliability during semi-autonomous missions.
- A semi-autonomous control paradigm: The implemented control paradigm enables semi-autonomous operation, leveraging both automated routines and human intervention for optimal task execution. A state machine governs the operation, orchestrating transitions between different control modes based on real-time sensor feedback and operator commands. It ensures coherent and efficient operation by defining states for different phases of the inspection process, including initialization, task execution, and completion. This approach enhances flexibility and adaptability in varying operational scenarios, ensuring robust performance in dynamic industrial environments.
- Sensor integration and feedback mechanisms: Critical to the platform’s functionality is the seamless integration of sensors for environment perception and task execution. High-precision sensors facilitate accurate localization, obstacle detection, and surface interaction monitoring. Real-time feedback from these sensors informs decision-making processes within the control system, enabling adaptive responses to environmental changes and operational contingencies.
3. System Overview
3.1. Tilting UAM Mechatronic Development
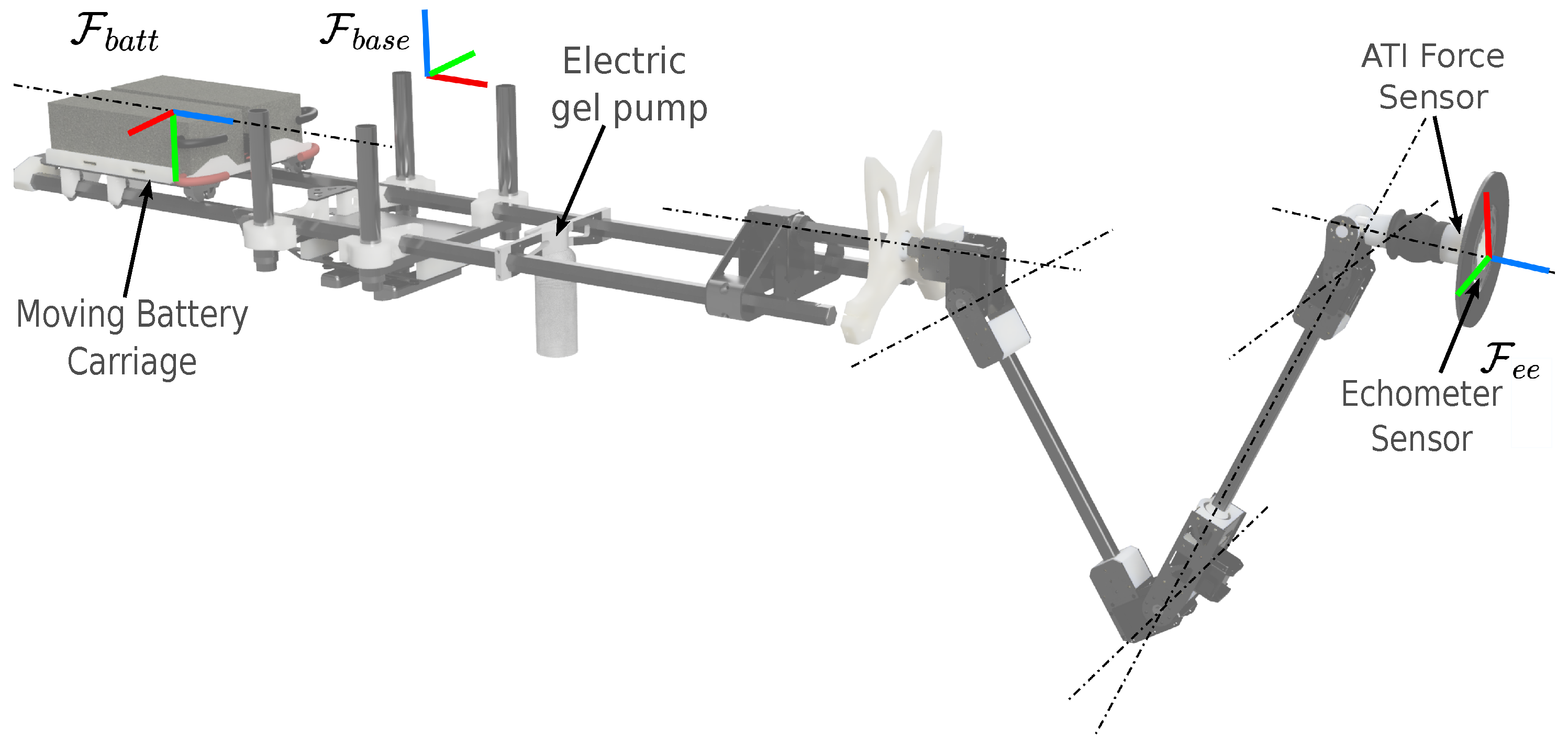
3.2. Robotic Arm
Moving Battery Carriage
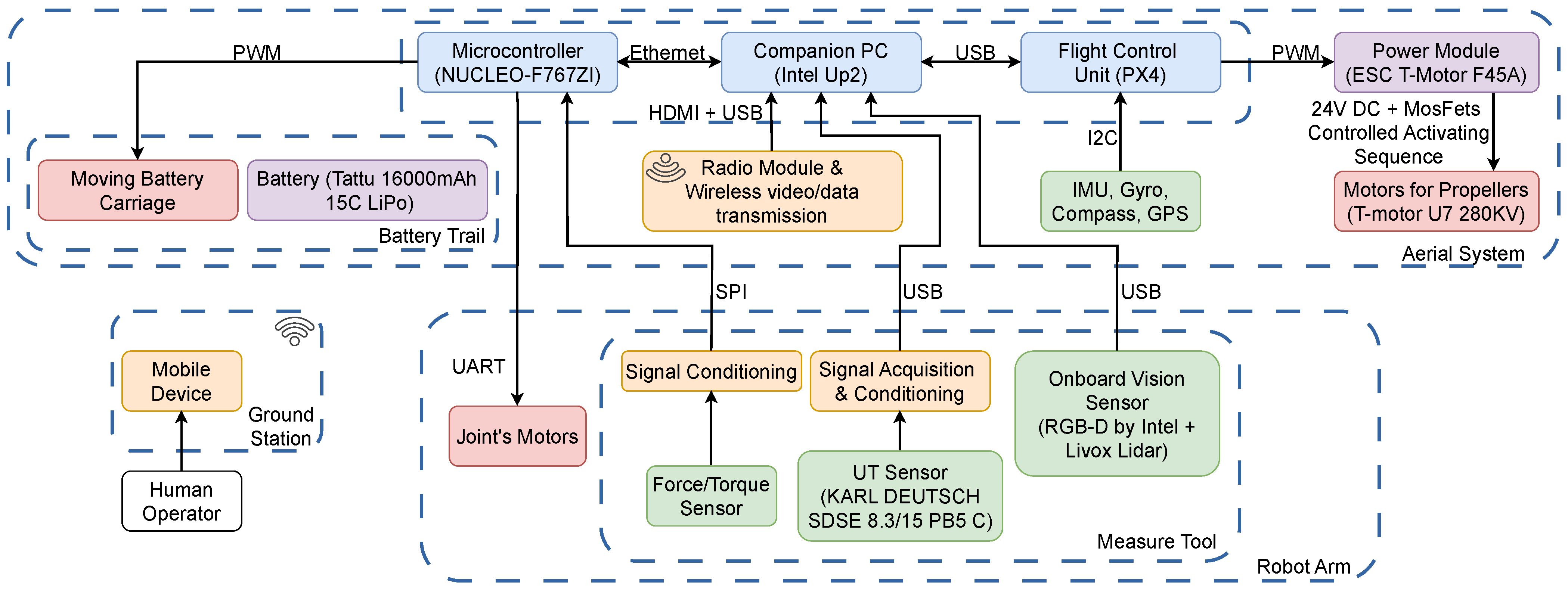
3.3. Electronics and Components
4. System Modeling
4.1. Control Allocation Problem
4.2. Robotic Arm
5. Task-Oriented Control Pipeline
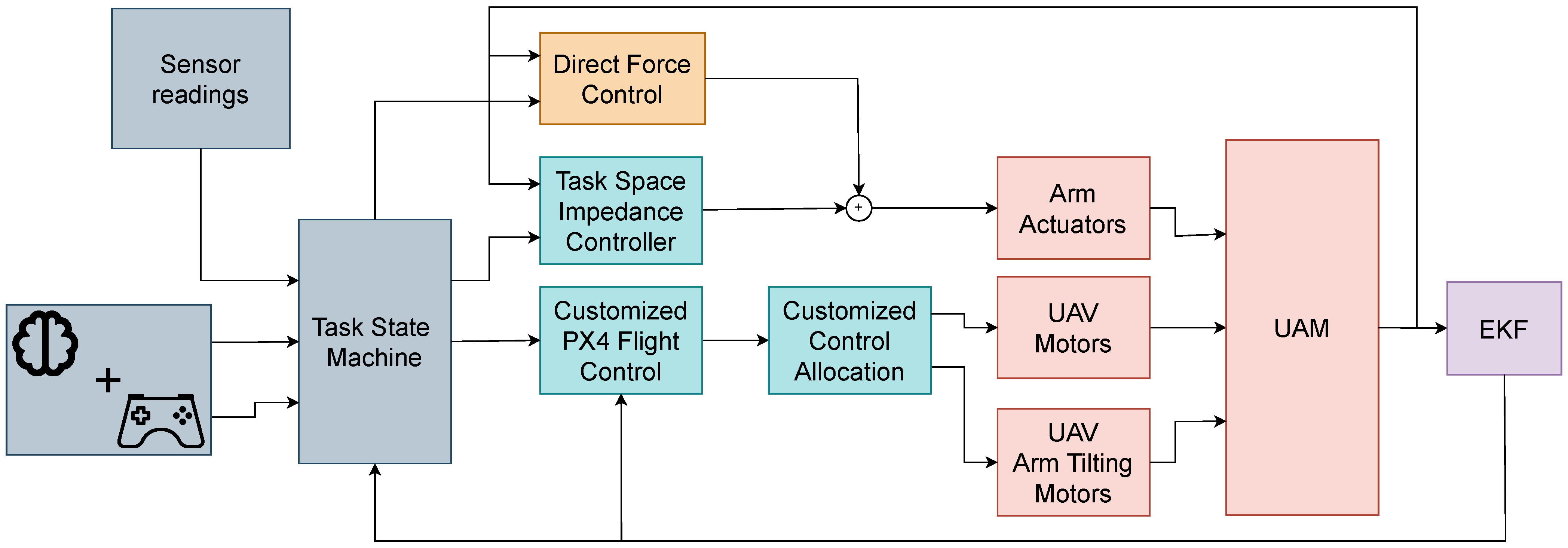
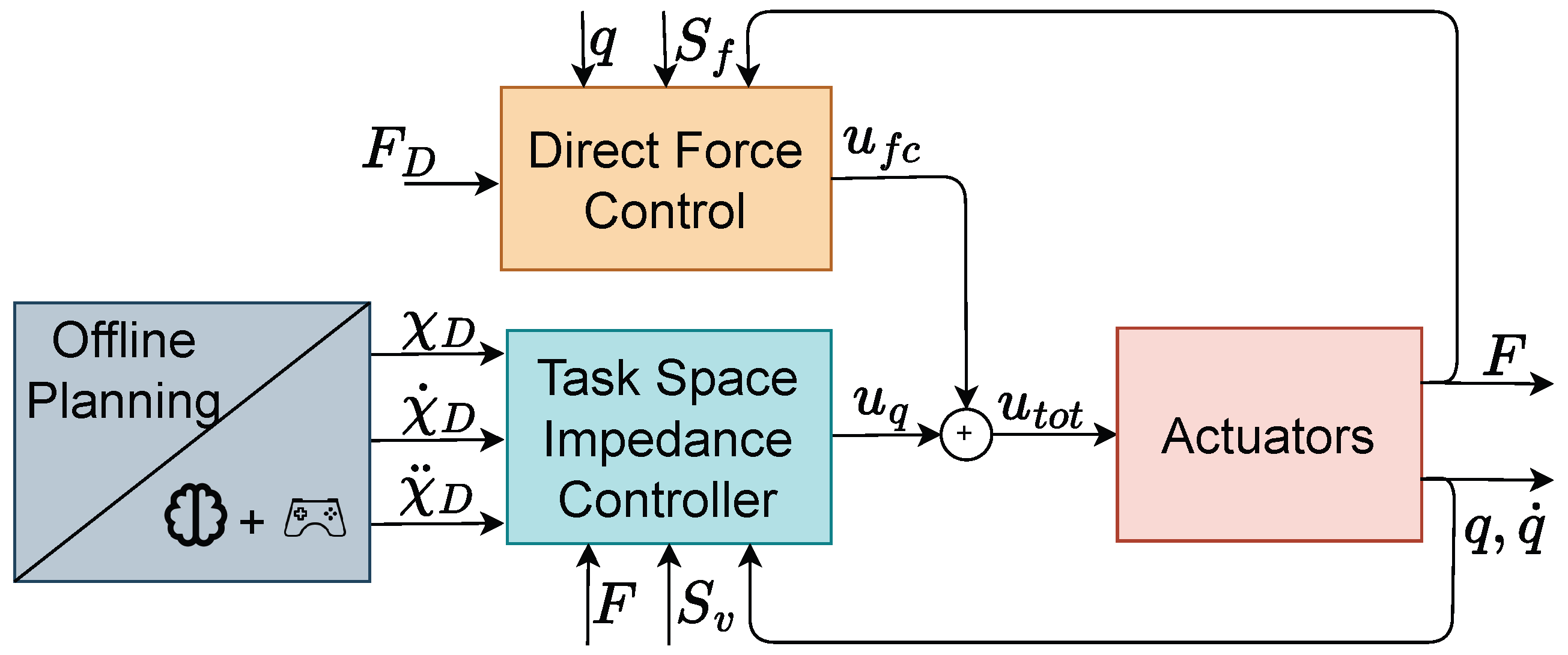
5.1. Controller Design
- Concurrently, the E-E pose is controlled in the task space with an inverse Jacobian approach, ensuring the rejection of all external disturbances. A parallel impedance-force control is developed to ensure motion and force tracking simultaneously.
5.2. Shared-Control and Task State Machine
5.3. Safety Layers
- Position, velocity, and acceleration of the joints: constraints are applied to the movement of each joint to prevent unsafe or excessive motion.
- Position, velocity, and acceleration in the operative space: limits are set on the overall motion of the arm within its working environment, avoiding trespassing in the field-of-view of other sensors, or near the propellers.
- Effort, temperature, and power consumption of the actuators: monitoring and restricting these parameters helps prevent overheating, overexertion, and excessive power usage, possibly leading to system failure.
- Forces and torques read via the tip sensor: these constraints ensure that the forces and torques exerted via and on the arm remain within safe limits, preventing damage to the arm.
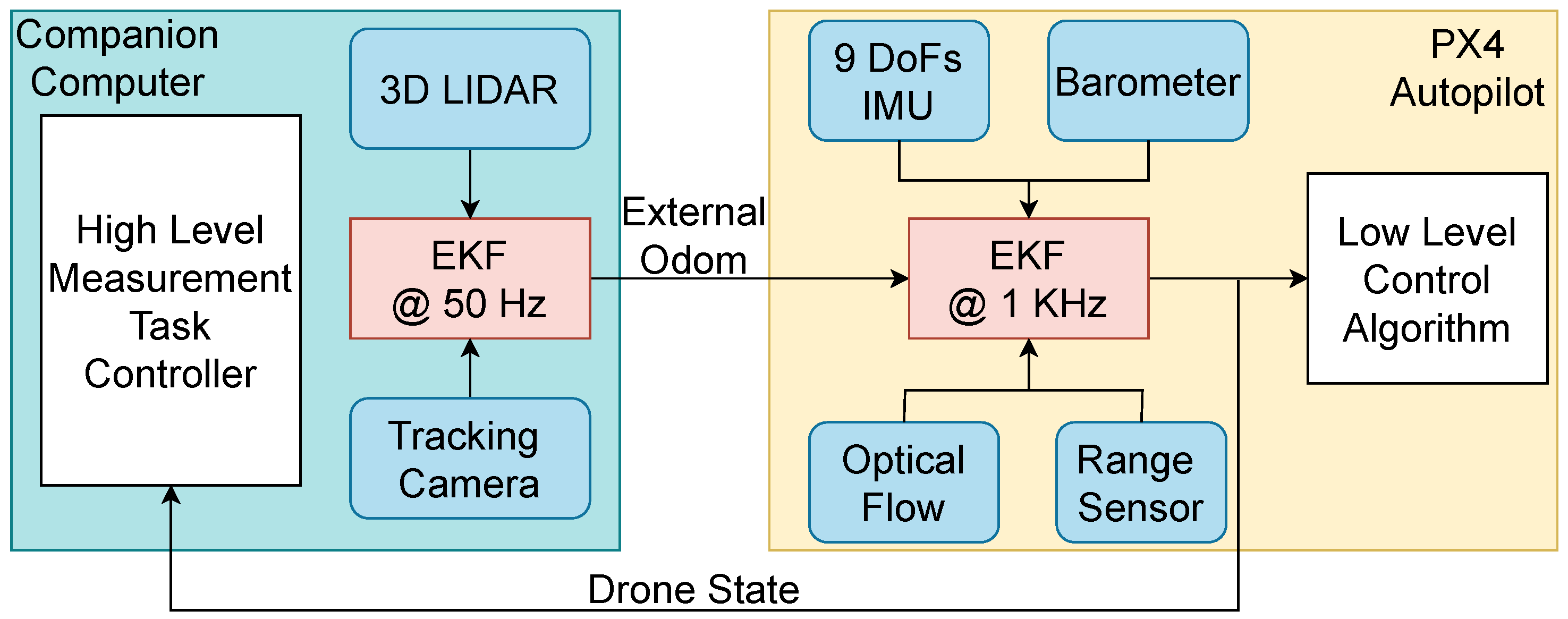
5.4. Localization and Navigation
- Unilidar L1 PM (Unitree Robotics, Hangzhou, China): a 3D LIDAR sensor providing detailed point cloud data for accurate odometry and mapping.
- Realsense T265 (Intel Corporation, Santa Clara, CA, USA): a tracking camera with an onboard IMU, offering position and velocity estimates through visual–inertial odometry.
- ArkFlow (ARK Electronics, Salt Lake City, UT USA): an optical flow sensor measuring horizontal velocity and altitude by analyzing ground-facing data.
- Pixhawk 6C (Holybro, Shenzhen, China) internal sensors, comprising the accelerometer, gyroscope, magnetometer, and barometer, support state estimation.
6. Results
Inspection Task Execution
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
DURC Statement
Acknowledgments
Conflicts of Interest
Appendix A. Stability Analysis of the Parallel Force–Impedance Controller
Appendix A.1. Impedance Subsystem Stability
Appendix A.1.1. Free Motion (No Contact)
Appendix A.1.2. Compliant Contact (Elastic Environment)
Appendix A.2. Force Subsystem Stability
Appendix A.3. Combined System Stability
References
- Sun, R.; Zhao, B.; Wu, C.; Qin, X. Research on Inspection Method of Intelligent Factory Inspection Robot for Personnel Safety Protection. Appl. Sci. 2025, 15, 5750. [Google Scholar] [CrossRef]
- Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; Maldague, X.P.V. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones 2021, 5, 106. [Google Scholar] [CrossRef]
- Piccina, A.; Bertoni, M.; Michieletto, G. A Taxonomy on Contact-Aware Multi-Rotors for Interaction Tasks. In Proceedings of the 2025 International Conference on Unmanned Aircraft Systems (ICUAS), Charlotte, NC, USA, 14–17 May 2025; pp. 355–361. [Google Scholar]
- Shaqura, M.; Alzuhair, K.; Abdellatif, F.; Shamma, J.S. Human Supervised Multirotor UAV System Design for Inspection Applications. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Marcellini, S.; D’Angelo, S.; De Crescenzo, A.; Marolla, M.; Lippiello, V.; Siciliano, B. Development of a Semi-autonomous Framework for NDT Inspection with a Tilting Aerial Platform. In Proceedings of the Experimental Robotics, Chiang Mai, Thailand, 26–30 November 2023; Ang, M.H., Jr., Khatib, O., Eds.; Springer: Cham, Switzerland, 2024; pp. 353–363. [Google Scholar]
- Feng, J.; Shang, B.; Hoxha, E.; Hernández, C.; He, Y.; Wang, W.; Xiao, J. Robotic Inspection and Data Analytics to Localize and Visualize the Structural Defects of Concrete Infrastructure. IEEE Trans. Autom. Sci. Eng. 2025; early access. [Google Scholar] [CrossRef]
- Dertien, E.; Stramigioli, S.; Pulles, K. Development of an inspection robot for small diameter gas distribution mains. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5044–5049. [Google Scholar]
- Ross, B.; Bares, J.; Fromme, C. A Semi-Autonomous Robot for Stripping Paint from Large Vessels. Int. Jour. Rob. Res. 2003, 22, 617–626. [Google Scholar] [CrossRef]
- Ollero, A.; Tognon, M.; Suarez, A.; Lee, D.; Franchi, A. Past, Present, and Future of Aerial Robotic Manipulators. IEEE Trans. Robot. 2022, 38, 626–645. [Google Scholar] [CrossRef]
- Praveen, A.; Ma, X.; Manoj, H.; Venkatesh, V.L.; Rastgaar, M.; Voyles, R.M. Inspection-on-the-fly using Hybrid Physical Interaction Control for Aerial Manipulators. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1583–1588. [Google Scholar]
- Ryll, M.; Muscio, G.; Pierri, F.; Cataldi, E.; Antonelli, G.; Caccavale, F.; Bicego, D.; Franchi, A. 6D interaction control with aerial robots: The flying end-effector paradigm. Int. J. Robot. Res. 2019, 38, 1045–1062. [Google Scholar] [CrossRef]
- Tzoumanikas, D.; Graule, F.; Yan, Q.; Shah, D.; Popovic, M.; Leutenegger, S. Aerial Manipulation Using Hybrid Force and Position NMPC Applied to Aerial Writing. arXiv 2020, arXiv:2006.02116. [Google Scholar] [CrossRef]
- Rashad, R.; Bicego, D.; Jiao, R.; Sanchez-Escalonilla, S.; Stramigioli, S. Towards Vision-Based Impedance Control for the Contact Inspection of Unknown Generically-Shaped Surfaces with a Fully-Actuated UAV. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1605–1612. [Google Scholar]
- Bodie, K.; Brunner, M.; Pantic, M.; Walser, S.; Pfndler, P.; Angst, U.; Siegwart, R.; Nieto, J. An Omnidirectional Aerial Manipulation Platform for Contact-Based Inspection. In Proceedings of the Robotics: Science and Systems XV, Freiburg im Breisgau, Germany, 22–26 June 2019; Robotics: Science and Systems Foundation: Los Angeles, CA, USA, 2019. RSS2019. [Google Scholar]
- Peric, L.; Brunner, M.; Bodie, K.; Tognon, M.; Siegwart, R. Direct Force and Pose NMPC with Multiple Interaction Modes for Aerial Push-and-Slide Operations. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 131–137. [Google Scholar]
- Nava, G.; Sablé, Q.; Tognon, M.; Pucci, D.; Franchi, A. Direct Force Feedback Control and Online Multi-Task Optimization for Aerial Manipulators. IEEE Robot. Autom. Lett. 2020, 5, 331–338. [Google Scholar] [CrossRef]
- Marcellini, S.; Cacace, J.; Lippiello, V. A PX4 Integrated Framework for Modeling and Controlling Multicopters with Til table Rotors. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; pp. 1089–1096. [Google Scholar]
- Bodie, K.; Brunner, M.; Pantic, M.; Walser, S.; Pfändler, P.; Angst, U.; Siegwart, R.; Nieto, J. Active Interaction Force Control for Contact-Based Inspection With a Fully Actuated Aerial Vehicle. IEEE Trans. Robot. 2021, 37, 709–722. [Google Scholar] [CrossRef]
- D’Angelo, S.; Corrado, A.; Ruggiero, F.; Cacace, J.; Lippiello, V. Stabilization and control on a pipe-rack of a wheeled mobile manipulator with a snake-like arm. Robot. Auton. Syst. 2024, 171, 104554. [Google Scholar] [CrossRef]
- Tognon, M.; Chávez, H.A.T.; Gasparin, E.; Sablé, Q.; Bicego, D.; Mallet, A.; Lany, M.; Santi, G.; Revaz, B.; Cortés, J.; et al. A Truly-Redundant Aerial Manipulator System With Application to Push-and-Slide Inspection in Industrial Plants. IEEE Robot. Autom. Lett. 2019, 4, 1846–1851. [Google Scholar] [CrossRef]
- Sumathy, V.; Ghose, D. Quadrotor-Based Aerial Manipulator Robotics. J. Indian Inst. Sci. 2024, 104, 669–690. [Google Scholar] [CrossRef]
- Rasheed, U.; Ordaz, C.; Xu, X.; Hu, Y.; Li, S.; Sutton, T.; Cai, J. Understanding the Impact of Teleoperation Technology on the Construction Industry: Adoption Dynamics, Workforce Perception, and the Role of Broader Workforce Participation. J. Constr. Eng. Manag. 2025, 151, 04025085. [Google Scholar] [CrossRef]
- Berx, N.; Decré, W.; De Schutter, J.; Pintelon, L. A harmonious synergy between robotic performance and well-being in human-robot collaboration: A vision and key recommendations. Annu. Rev. Control 2025, 59, 100984. [Google Scholar] [CrossRef]
- Yang, C.; Zhu, Y.; Chen, Y. A Review of Human–Machine Cooperation in the Robotics Domain. IEEE Trans. Hum.-Mach. Syst. 2022, 52, 12–25. [Google Scholar] [CrossRef]
- Franchi, A.; Secchi, C.; Son, H.I.; Bulthoff, H.H.; Giordano, P.R. Bilateral Teleoperation of Groups of Mobile Robots with Time-Varying Topology. IEEE Trans. Robot. 2012, 28, 1019–1033. [Google Scholar] [CrossRef]
- Lee, D.; Franchi, A.; Son, H.I.; Ha, C.; Bülthoff, H.H.; Giordano, P.R. Semiautonomous Haptic Teleoperation Control Architecture of Multiple Unmanned Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2013, 18, 1334–1345. [Google Scholar] [CrossRef]
- Young, M.; Miller, C.; Bi, Y.; Chen, W.; Argall, B.D. Formalized Task Characterization for Human-Robot Autonomy Allocation. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6044–6050. [Google Scholar]
- Selvaggio, M.; Cacace, J.; Pacchierotti, C.; Ruggiero, F.; Giordano, P.R. A Shared-Control Teleoperation Architecture for Nonprehensile Object Transportation. IEEE Trans. Robot. 2022, 38, 569–583. [Google Scholar] [CrossRef]
- Gioioso, G.; Mohammadi, M.; Franchi, A.; Prattichizzo, D. A force-based bilateral teleoperation framework for aerial robots in contact with the environment. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 318–324. [Google Scholar]
- Allenspach, M.; Lawrance, N.; Tognon, M.; Siegwart, R. Towards 6DoF Bilateral Teleoperation of an Omnidirectional Aerial Vehicle for Aerial Physical Interaction. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 9302–9308. [Google Scholar]
- Coelho, A.; Sarkisov, Y.; Wu, X.; Mishra, H.; Singh, H.; Dietrich, A.; Franchi, A.; Kondak, K.; Ott, C. Whole-Body Teleoperation and Shared Control of Redundant Robots with Applications to Aerial Manipulation. J. Intell. Robot. Syst. 2021, 102, 14. [Google Scholar] [CrossRef]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial Manipulation: A Literature Review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef]
- Barakou, S.C.; Tzafestas, C.S.; Valavanis, K.P. Control Strategies for Real-Time Aerial Manipulation With Multi-Dof Arms: A Survey. In Proceedings of the 2025 International Conference on Unmanned Aircraft Systems (ICUAS), Charlotte, NC, USA, 14–17 May 2025; pp. 139–146. [Google Scholar]
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning and Control; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- D’Angelo, S.; Pagano, F.; Longobardi, F.; Ruggiero, F.; Lippiello, V. Efficient Development of Model-Based Controllers in PX4 Firmware: A Template-Based Customization Approach. In Proceedings of the 2024 International Conference on Unmanned Aircraft Systems (ICUAS), Chania, Greece, 4–7 June 2024; pp. 1155–1162. [Google Scholar]
- eCalc. eCalc—Reliable Electric Drive Simulations. 2025. Available online: https://www.ecalc.ch/ (accessed on 26 June 2025).
- Zorić, F.; Suarez, A.; Vasiljević, G.; Orsag, M.; Kovačić, Z.; Ollero, A. Performance Comparison of Teleoperation Interfaces for Ultra-Lightweight Anthropomorphic Arms. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 7026–7033. [Google Scholar]
- Hui, T.; Fumagalli, M. Advancing Manipulation Capabilities of a UAV Featuring Dynamic Center-of-Mass Displacement. In Proceedings of the 2025 International Conference on Unmanned Aircraft Systems (ICUAS), Charlotte, NC, USA, 14–17 May 2025; pp. 347–354. [Google Scholar]
- Kotarski, D.; Kasać, J. Generalized Control Allocation Scheme for Multirotor Type of UAVs. In Drones; Dekoulis, G., Ed.; IntechOpen: Rijeka, Croatia, 2018; Chapter 4. [Google Scholar]
- Kamel, M.; Verling, S.; Elkhatib, O.; Sprecher, C.; Wulkop, P.; Taylor, Z.; Siegwart, R.; Gilitschenski, I. The Voliro Omniorientational Hexacopter: An Agile and Maneuverable Tiltable-Rotor Aerial Vehicle. IEEE Robot. Autom. Mag. 2018, 25, 34–44. [Google Scholar] [CrossRef]
- Allenspach, M.; Bodie, K.; Brunner, M.; Rinsoz, L.; Taylor, Z.; Kamel, M.; Siegwart, R.; Nieto, J. Design and optimal control of a tiltrotor micro-aerial vehicle for efficient omnidirectional flight. Int. J. Robot. Res. 2020, 39, 1305–1325. [Google Scholar] [CrossRef]
- Sadien, E.; Roos, C.; Birouche, A.; Carton, M.; Grimault, C.; Romana, L.E.; Basset, M. A detailed comparison of control allocation techniques on a realistic on-ground aircraft benchmark. In Proceedings of the American Control Conference 2019, Philadelphia, PA, USA, 10–12 July 2019. [Google Scholar]
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Schichler, L.; Festl, K.; Solmaz, S. Robust Multi-Sensor Fusion for Localization in Hazardous Environments Using Thermal, LiDAR, and GNSS Data. Sensors 2025, 25, 2032. [Google Scholar] [CrossRef] [PubMed]
- Labbé, M.; Michaud, F. RTAB-Map as an open-source lidar and visual simultaneous localization and mapping library for large-scale and long-term online operation. J. Field Robot. 2019, 36, 416–446. [Google Scholar] [CrossRef]
- D’Angelo, S.; Selvaggio, M.; Lippiello, V.; Ruggiero, F. Semi-autonomous unmanned aerial manipulator teleoperation for push-and-slide inspection using parallel force/vision control. Robot. Auton. Syst. 2025, 186, 104912. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | (m) | (rad) | (m) | (rad) |
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | |||
| 5 | 0 | 0 |
| Task Phase | Timing [s] |
|---|---|
| Free flight and alignment | 0–60 |
| Arm deploy | 60–80 |
| Approach | 80–180 |
| I Pushing | 180–200 |
| II Pushing | 240–260 |
| Retreat and landing | 260–300 |
| Task Phase | Timing [s] |
|---|---|
| Free flight and alignment | 0–100 |
| Arm deploy | 100–120 |
| Approach | 120–150 |
| I Pushing | 150–170 |
| II Pushing | 195–215 |
| III Pushing | 245–265 |
| IV Pushing | 219–315 |
| V Pushing | 390–410 |
| VI Pushing | 450–470 |
| Retreat and landing | 470–500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Angelo, S.; Marcellini, S.; De Crescenzo, A.; Marolla, M.; Lippiello, V.; Siciliano, B. A Semi-Autonomous Aerial Platform Enhancing Non-Destructive Tests. Drones 2025, 9, 516. https://doi.org/10.3390/drones9080516
D’Angelo S, Marcellini S, De Crescenzo A, Marolla M, Lippiello V, Siciliano B. A Semi-Autonomous Aerial Platform Enhancing Non-Destructive Tests. Drones. 2025; 9(8):516. https://doi.org/10.3390/drones9080516
Chicago/Turabian StyleD’Angelo, Simone, Salvatore Marcellini, Alessandro De Crescenzo, Michele Marolla, Vincenzo Lippiello, and Bruno Siciliano. 2025. "A Semi-Autonomous Aerial Platform Enhancing Non-Destructive Tests" Drones 9, no. 8: 516. https://doi.org/10.3390/drones9080516
APA StyleD’Angelo, S., Marcellini, S., De Crescenzo, A., Marolla, M., Lippiello, V., & Siciliano, B. (2025). A Semi-Autonomous Aerial Platform Enhancing Non-Destructive Tests. Drones, 9(8), 516. https://doi.org/10.3390/drones9080516