Abstract
In recent years, the rapid development of lightweight Unmanned Aerial Vehicle (UAV) technology under 250 g has begun to challenge the validity of existing mass-based safety classifications. The commonly used 250 g threshold for defining “harmless” UAVs has become a subject requiring more detailed evaluations, especially as new models with increased speed and performance enter the market. This study aims to reassess the adequacy of the current 250 g mass limit by conducting a comprehensive analysis using human-centered injury metrics, including kinetic energy, Blunt Criterion (BC), Viscous Criterion (VC), and the Abbreviated Injury Scale (AIS). Within this scope, an extensive dataset of commercial UAV models under 500 g was compiled, with a particular focus on the sub-250 g segment. For each model, KE, BC, VC, and AIS values were calculated using publicly available technical data and validated physical models. The results were compared against established injury thresholds, such as 14.9 J (AIS-3 serious injury), 25 J (“harmless” threshold), and 33.9 J (AIS-4 severe injury). Furthermore, new recommendations were developed for regulatory authorities, including energy-based classification systems and mission-specific dynamic threshold mechanisms. According to the findings of this study, most UAVs under 250 g continue to remain below the current “harmless” threshold values. However, some next-generation high-speed UAV models are approaching or exceeding critical KE levels, indicating a need to reassess existing regulatory approaches. Additionally, the strong correlation between both BC and VC metrics with AIS outcomes demonstrates that these indicators are complementary and valuable tools for assessing injury risk. In this context, the adoption of an energy-based supplementary classification and dynamic, mission-based regulatory frameworks is recommended.
1. Introduction
Unmanned Aerial Vehicles (UAVs), also commonly known as drones, are emerging as a rapidly evolving technological domain with increasing strategic significance in both military and civilian sectors [1,2,3,4]. These systems, which have the potential to enhance operational effectiveness on modern battlefields, are also opening the door to versatile civilian applications that address the needs of increasingly urbanized societies [5,6]. The current level of technological maturity now enables the integration of UAVs into civilian airspace [7,8], making them an integral component of future urban infrastructure and public services.
In recent years, numerous studies have demonstrated the contributions of UAVs to scientific and operational applications [1,3,9,10,11,12]. Although preferences regarding specific UAV missions may vary, it is evident that UAV usage will continue to grow steadily on a global scale. Today, these vehicles are effectively employed in a wide range of public services, including border security [13], wildlife monitoring [14], military training operations [15], meteorological observation [16], and law enforcement activities [17].
UAVs are not only transforming existing industries but are also poised to shape the technological and economic dynamics of the future by driving the creation of new market segments. Commercial sectors such as precision agriculture, logistics operations, and infrastructure inspections are increasingly benefiting from the advantages offered by UAV technology, integrating these systems into their operational processes [18].
Future technological advancements will primarily focus on enhancing UAV operational endurance, expanding payload capacity, and making human-UAV interaction more intuitive and effective. In this context, the development of comprehensive legal frameworks and regulatory protocols to support safe and secure UAV operations is of critical importance [19,20].
Moreover, integrating artificial intelligence technologies into UAV systems will enable these platforms to automate decision-making processes and achieve greater operational autonomy [21]. This integration will elevate UAV autonomy levels, facilitating the development of intelligent systems capable of adapting rapidly to environmental conditions, executing tasks more efficiently, and performing complex missions independently of human intervention. Consequently, UAVs are expected to evolve from mere observation or transport tools into decision-making components of the future technological ecosystem.
UAVs are strategic platforms not only from a technological perspective but also in terms of their economic potential. For equipment manufacturers, investors, and service providers, the UAV sector offers significant commercial opportunities, thanks to its rapidly expanding and diversifying range of applications. According to a 2024 report, the global commercial UAV market was valued at USD 30.02 billion in 2024 and is projected to reach USD 54.64 billion by 2030, with a compound annual growth rate (CAGR) of 10.6% over the 2025–2030 period [22].
Projections from the Association for Unmanned Vehicle Systems International (AUVSI) indicate that over 100,000 new jobs are expected to be created in the UAV sector by 2025. This growth is driving demand for a highly skilled workforce; individuals will need to pursue training programs offered by higher education institutions or specialized technical institutes to effectively utilize UAV technologies and meet industry needs [23].
As of 2024, UAVs under 25 kg constituted the largest segment of the commercial UAV market, accounting for 80.5% of revenue. This strong market position is attributed to their operational flexibility and user-friendly functionality. Their low takeoff weights ensure compliance with stringent regulations and suitability for a wide range of applications. Additionally, their maneuverability in confined spaces and efficient flight performance are driving demand for this class. Notably, their role in transporting medical supplies, conducting search and rescue operations, and supporting disaster response efforts during the COVID-19 pandemic further underscored the importance of this segment.
By product type, rotary-wing UAVs accounted for over 78% of the commercial UAV market in 2024 and are expected to maintain their dominant position. However, the hybrid UAV segment, which combines the advantages of fixed-wing and rotary-wing designs, is projected to be the fastest-growing segment, with a CAGR exceeding 18%. Geographically, the Asia-Pacific region represented the largest regional market in 2024, with a 30.8% market share, driven by supportive regulations and government adoption of commercial UAV applications in countries such as Japan and China.
To sustain this growth in the UAV sector, it is essential to establish comprehensive legal frameworks and institutional structures that govern UAV operations. One of the fundamental steps in supporting the development of UAV regulations is the creation of an appropriate classification system. An effective classification system enables the definition of distinct regulatory requirements for each UAV category based on its associated risk level.
A newly developed UAV classification system will be a critical component that directly impacts all stakeholders in the sector. These classifications will redefine design criteria, material selection, and system integration for equipment manufacturers; transform operational scenarios, mission types, and responsibilities for service providers; prompt investors to reassess risk and return analyses based on class-based distinctions. Regulatory bodies (e.g., FAA and EASA) will shape inspection and licensing processes according to classifications. Training and certification institutions will adapt pilot training programs to specific classes, while software developers will create control algorithms and data processing systems tailored to different UAV classes. Insurance companies will structure risk assessments by class, and security and defense units will replan operational scenarios accordingly. Additionally, end users in sectors such as agriculture, construction, media, and cargo will need to align their operational permits and boundaries with classification criteria. Therefore, any work influencing UAV classification should be designed to encompass all stakeholders, considering not only technical specifications but also mission profiles, operational risks, societal impacts, and legal responsibilities.
UAVs under 250 g are generally considered low-risk due to their lightweight nature and are subject to more flexible regulatory rules in many countries. These micro and nano-class drones are well-suited for hobby use, indoor flights, and low-risk commercial missions. Their low kinetic energy minimizes the likelihood of causing serious injury or property damage upon impact. As a result, many civil aviation authorities apply lighter regulations to such UAVs, often exempting them from registration requirements or applying more lenient flight restrictions [24].
Today, small drones are readily available at affordable prices in toy stores, supermarkets, and online marketplaces. These lightweight and compact devices are typically used for personal entertainment in backyards, sports fields, or parking lots. In most cases, such drones pose minimal danger to nearby individuals. However, existing aviation regulations in many countries treat these small drones under the same regulatory framework as larger and more powerful hobby or professional drones, leading to a legal gray area for their operation. This uncertainty has prompted some aviation authorities to consider introducing a weight-based threshold to create a dedicated “harmless” category for these drones [25].
Nevertheless, a universal standard for UAV classification has yet to be established. The defense sector develops specialized classification systems tailored to its needs, while civilian applications favor more flexible and evolving categories. Generally, UAVs are grouped based on technical characteristics such as size, range, and flight duration, with multi-layered classification models used particularly in military contexts. This leads to the possibility of the same UAV model being categorized differently under various classification systems, causing confusion in the classification process [26].
Various criteria are considered in UAV classification, including the Maximum Takeoff Weight (MTOW), physical dimensions, operational environment, and system capabilities, or combinations thereof. While some of these criteria do not directly contribute to the system’s safety performance, they play important roles in other aspects of the regulatory framework, such as operational and administrative evaluations [27,28].
MTOW is an effective metric frequently used by regulatory agencies to classify both manned and unmanned aircraft, as it is directly related to the potential kinetic energy upon impact [27]. This relationship is critical for operational safety and is well-supported in the literature [29,30,31].
However, current MTOW-based classification systems, such as AC 23.1309 [32], encompass broad categories and are inadequate for capturing the nuances of very small UAVs. This highlights the need for more precise and detailed classifications for lightweight UAVs [27].
With the rapid pace of technological advancement, the continued relevance of the 250 g threshold in UAV regulations has become a significant topic of debate. Initially established to minimize safety risks by assuming low potential kinetic energy upon impact, this threshold is now being challenged as UAVs under 250 g are increasingly equipped with sophisticated technologies such as high-resolution cameras, advanced sensors, autonomous flight capabilities, and data transmission systems. These advancements enable their use not only in recreational or low-risk tasks but also in critical missions such as surveillance, data collection, and logistics. Therefore, it is essential to reassess the adequacy of the current threshold to provide a robust safety and regulatory framework in light of technological developments. Reevaluating the 250 g limit based on technical capabilities and operational risks is now a critical necessity for both safety and commercial sustainability.
This study aims to reassess the validity of the globally adopted 250 g threshold by regulatory authorities using risk-based approaches, in the context of the rapid proliferation and technological evolution of UAVs in civilian applications. Focusing on drone models widely used in manufacturing and civilian sectors, technical data from open sources were analyzed using human-centered metrics, including parameters such as kinetic energy upon impact, impact potential, and operational safety. The primary objective is to evaluate the adequacy of the 250 g threshold in terms of regulatory and safety considerations, based on the current technological capabilities and potential risks of sub-250 g UAVs, and to provide a scientific foundation for future classification frameworks. In the present study, the terms “Unmanned Aerial Vehicle (UAV)” and “drone” are used interchangeably to refer to the same class of aircraft systems.
The remainder of this paper is structured as follows: Section 2 provides a comprehensive review of existing literature and compares different approaches used in UAV safety assessments to date. Section 3 discusses current state-of-the-art methods in UAV classification, examining the limitations of mass-based classifications and exploring next-generation energy-focused alternatives. Section 4 details the human-centered safety criteria underpinning this study—Kinetic Energy (KE), Blunt Criterion (BC), Viscous Criterion (VC), and the Abbreviated Injury Scale (AIS). Section 5 presents the research methodology, including data processing, calculation methods, and analysis procedures. Section 6 describes the data collection process, the UAV datasets used, and the sources of the analyzed parameters. Section 7 presents the comprehensive analysis results, discusses the validity of the current 250 g “harmless” threshold, and offers forward-looking regulatory recommendations. The final section provides general conclusions, policy recommendations, and highlights directions for future research.
2. Literature Review
In recent years, sub-250 g UAVs have attracted increasing interest from both UAV manufacturers and users. This trend is primarily driven by the assumption, reflected in the regulatory frameworks of many countries, that UAVs under this weight threshold pose a very low risk of causing serious injury or fatal accidents. This perception has paved the way for more flexible regulatory frameworks and broader commercial opportunities, thereby promoting the development and widespread adoption of UAVs in this category.
Since UAVs were initially developed for military purposes, classification approaches have largely evolved according to the tactical needs of individual countries. Consequently, there is a lack of consensus in the literature regarding the criteria used for UAV classification and their definitions. In this context, Cai et al. [33] defined Mini UAVs as micro aerial vehicles (MAVs) with a wingspan or rotor diameter of less than 15 cm. Furthermore, instead of MTOW, this class was characterized by a payload capacity of several tens of kilograms. However, despite analyses of various UAV systems in production, there is still no terminological or structural consistency in defining the Mini UAV or Mini UAS category.
The absence of standardized operational parameters—such as range, flight endurance, operational altitude, total mass, physical dimensions, and payload capacity—has resulted in significant variations across different classification schemes [34]. These differences are largely influenced by national defense strategies, force structures (air, land, and sea), and specific operational environment requirements. Similarly, differing needs across civilian applications make it difficult to standardize classification frameworks. This clearly highlights the need to establish a comprehensive and consistent UAV classification system for both military and civilian domains.
In a comprehensive study by Maziar A. [34], various norms were employed for UAV classification. Criteria such as performance characteristics, payload endurance, range, maximum altitude, wing loading, engine type, and power/thrust ratio were used for this purpose.
Villa et al. [35], in adopting the US Department of Defense’s five-tier classification system, did not provide detailed parameters specific to Mini UAVs. Similarly, Marin et al. [36] defined classification criteria based on size, weight, endurance, range, and flight altitude, but categorized Mini UAVs as having a weight of 25–150 kg, range of less than 10 km, flight altitude of 150–300 m, and endurance of less than 2 h.
Gupta et al. [37] classified Mini UAVs as having a weight of 2–20 kg, a flight altitude of 3000 feet, and a range of 25 km, while somewhat unusually listing endurance as “2 days.”
Hazim et al. [9], in their study of civilian applications, classified UAVs only as Low-Altitude Platforms (LAP) and High-Altitude Platforms (HAP), defining LAP with vague parameters such as altitude below 5 km, range under 200 km, and “tens of kilograms” in weight.
Hartanto et al. [38] highlighted the absence of a global standard in current classification norms. Wang et al. [39] defined Mini UAVs as having a wingspan of 100–300 cm and weight below 50 kg, while classifying Micro UAVs as having a wingspan of 15–100 cm and weight below 1 kg, though omitting range, endurance, and operational altitude.
Weed [40] analyzed the strengths and weaknesses of Mini UAVs in military operations using systems such as Pointer, Scout, Exodrone, and Cypher; however, the lack of clearly defined parameters illustrates that ambiguities in this category persist over time.
Hsu [41] provided a general classification of Chinese UAVs but used only ambiguous criteria such as low altitude, short endurance, and short range to define Mini UAVs. Lee et al. [42] defined Mini UAVs as man-portable systems, using only a wingspan of at least 1 m as the defining parameter.
A report by the UK Parliament [43] classified Mini UAVs solely by weight, using a range of 2–20 kg, while Rawat et al. [44] included a helicopter with a 12-pound weight, 30 min flight endurance, and 15-pound payload capacity in this category.
Anderson et al. [45] described Mini UAVs as “low and slow” systems, typically with weights under 20 kg, a few hours of flight endurance, and limited range.
Cai et al. [33] provided limited parameters, including size under 5 m, MTOW of 10 kg, altitude under 1200 feet AGL (above ground level), range up to 25 km, and endurance up to 48 h, and they used the term “small tactical UAV” instead of “mini.”
Aswini et al. [46] defined Mini UAVs using only two parameters: weight of 2–20 kg and altitude of 300 feet. Abdelwahid et al. [47] used an MTOW of 7 kg, altitude of 300 feet, and endurance of 1 h.
In summary, it is evident that a wide range of differing criteria are used in UAV classification. Tables reflecting this diversity are provided, for example, in studies [3,6,24,34], and [48], enabling a comparative analysis of different classification approaches.
Overall, there is notable diversity in the definitions of Mini UAVs in literature. Core parameters such as the weight, speed, range, endurance, altitude, and wingspan are addressed with widely varying thresholds and combinations across different studies. This results in both terminological and operational inconsistencies, making it difficult to standardize UAV classifications on a global scale.
In particular, evaluating the 250 g threshold—widely adopted by many regulatory bodies around the world as a safety and risk-based reference—takes on added significance in this context. With technological advancements, the functionality and potential risks of sub-250 g UAVs are increasing; thus, reassessing the relevance of this threshold from both regulatory and scientific perspectives is now a critical necessity.
2.1. The UAV Classification Dilemma
Classification is not a subject unique to UAV regulations; rather, it is one of the fundamental components of human cognition and scientific methodologies. Disciplines, organizations, and societies develop and utilize classification systems in a wide array of contexts—from everyday life to scientific taxonomies, and from legal codifications to statistical analyses. At its core, classification is a descriptive and analytical endeavor aimed at distinguishing similarities and differences, serving as an epistemological and methodological tool across many disciplines [49].
Classification systems are not static; they must be reshaped over time in response to changing conditions, emerging new data, and practical deficiencies [50]. Classification is not merely the act of grouping objects into clusters, but also an intellectual process that questions whether these clusters are meaningful and whether intergroup distinctions are genuinely valid. Therefore, the validity of a classification must be assessed not only through structural consistency but also through conceptual appropriateness and functional relevance. UAV classification should be considered within this general framework, with constant evaluation of how well the chosen parameters align with operational requirements, safety objectives, and technological developments [51].
Classifying UAVs requires a multi-layered approach, starting from the analysis of the technical characteristics of these platforms and extending to the development and application of classification schemes. However, most existing classification efforts have regarded this process merely as a practical regulatory tool, often neglecting the underlying conceptual foundations, criteria for similarities and differences, and contextual validity. Yet the role of classification is directly influential, particularly in establishing critical safety standards such as airworthiness [52]. Consequently, studies on UAV classification require an in-depth methodological assessment; the purpose, validity, and application contexts of classification must be addressed in a multidimensional manner [53].
Regulatory regimes for UAV systems are expected to show significant structural similarities to traditional aviation norms. The long-established institutional knowledge and regulatory experience—developed and applied for over a century in the domain of conventional aircraft—constitute an invaluable and instructive foundation [50]. In this regard, UAVs are not revolutionary to the extent that they would fundamentally transform existing aviation law; rather, they are expected to be adaptable within current legal and technical frameworks [30,37].
Nevertheless, one of the main challenges in UAV-related regulatory efforts is defining customized safety standards for different UAV types and operational scenarios. In particular, the need to develop flexible regulations that allow certain UAV categories with low-risk profiles to be partially or fully exempt from general airworthiness requirements is a crucial aspect of this process [51].
Certification regimes for conventional aircraft are based on national civil aviation authorities applying airworthiness standards, as defined in Annex 8 of the Chicago Convention, to ensure compliance with specific technical specifications. Within this framework, the classification schemes employed in national certification processes are largely shaped by basic parameters such as the aircraft’s weight or mass. Weight is typically considered an indirect indicator of passenger-carrying capacity, making it a fundamental criterion in determining operational risk levels [54].
Accordingly, traditional systems classify aircraft according to threshold values such as <600 kg and <5760 kg, assigning them to specific regulatory codes. For example, Ultralight aircraft fall under the <600 kg category, aircraft under Part 23 are classified below 5760 kg, and those under Part 25 exceed 5760 kg, each subject to corresponding airworthiness requirements [30]. This framework enables aircraft to be grouped according to generally homogeneous technical and operational characteristics, providing designers, manufacturers, and users with well-defined and predictable certification requirements.
Moreover, this classification system offers a more straightforward, practical, and manageable regulatory structure by grouping aircraft with similar technical characteristics among the wide variety of vehicles available in the market. Another important aspect is that these certification regimes have evolved in parallel with technological advancements [55]. Evolving engineering practices, operational needs, and accumulated experience necessitate the continuous updating of relevant standards and classification practices, playing a critical role in ensuring both technical compliance and the maintenance of a robust safety culture [51].
It is widely acknowledged that a “one-size-fits-all” approach is not applicable in UAV regulations [50,56]. However, given the increasing number and technological diversity of UAVs, evaluating each operation individually would impose an unsustainable burden on regulatory authorities. Guided by ICAO and based on Article 31 of the Chicago Convention, there is a growing trend toward applying a certification framework for UAVs similar to that used for conventional aircraft [57]. In this context, classifying low-risk systems—such as sub-250 g UAVs—into smaller, more homogeneous subgroups is a critical step for enhancing regulatory efficiency and optimizing resource allocation. Within modern regulatory thinking, such classifications should be regarded not only as tools for ensuring technical compliance but also as fundamental mechanisms for fostering communication among stakeholders and facilitating international harmonization.
Without an effective and universally accepted UAV classification scheme, it becomes exceedingly difficult to consistently define and implement regulations, standards, and certification requirements, and achieving regulatory harmonization at the international level becomes virtually impossible. Classification involves not only distinguishing systems based on technical features but also determining how these features relate to regulatory frameworks, safety standards, and operational conditions. Literature and regulatory bodies consistently emphasize that classification is a prerequisite for standard development and airworthiness assessment; various studies have shown that the absence of classification leads to uncertainty and arbitrariness in regulatory processes. In this regard, classification should be regarded not merely as a technical sorting method, but as a foundational element of regulatory logic.
2.2. A Review of State-of-the-Art UAV Classification Approaches
This section aims to examine how classification is structured and implemented within existing regulatory frameworks. This analysis provides both a theoretical and practical foundation that will support the more in-depth exploration of UAV classifications in subsequent sections. The approaches reviewed here have been selected from examples that have had significant influence in the regulatory domain and are considered references in the literature; they include both classical works reflecting historical development and contemporary initiatives representing current regulatory trends. In this way, the evolution of classification in the regulatory context can be assessed from a multidimensional perspective.
2.2.1. FAA
In the United States, UAV regulations are undergoing a dynamic transformation as the Federal Aviation Administration (FAA) works to implement the mandates set forth in the FAA Modernization and Reform Act (FMRA) of 2012 [58]. This transitional process is characterized by the absence of a fully established, comprehensive, and definitive regulatory framework, leading the FAA to adopt case-by-case evaluations based on operational needs. In this context, the FAA evaluates both public and private UAV operations on an individual application basis, granting specific exemptions for certain types of operations and thereby creating a flexible regulatory environment.
However, the FMRA itself provides the FAA with a legal framework for developing a classification system for UAVs. This legal framework serves as a key reference point for shaping the FAA’s future regulations and is critical for systematizing regulatory practices. The practical implications of the United States’ approach to UAV system (UAS) classification are particularly evident in the “Notice of Proposed Rulemaking” (NPRM) documents issued by the FAA. The NPRM document concerning small UAVs presents a classification scheme for UAVs intended for civil use, developed based on specific technical and operational criteria, as shown in Table 1 below [50,59]. This classification aims to serve core regulatory objectives such as ensuring flight safety, integrating UAVs into airspace, and clarifying areas of responsibility.

Table 1.
FAA NPRM classification scheme [51].
The FAA’s classification strategy in this regard is shaped by the need to maintain a balance between flexibility—so as to respond to technological advancements—and the structural coherence required to preserve regulatory consistency.
The FMRA 2 set the upper weight limit for the “small UAS” (small Unmanned Aircraft Systems) category at 55 pounds (approximately 24.9 kg), a threshold that can be understood within a historical context based on model aircraft regulations. Another notable aspect of the FMRA is the explicit specification of a 2 kg limit for publicly owned UAS systems. This limit indicates the need to develop distinct regulatory requirements for smaller systems intended for public safety operations. However, the FMRA does not provide a clear definition of a “micro UAS” class for private or commercial use, and thus does not explicitly mandate such a classification.
The concept of a micro UAS class is instead based on recommendations from the Small UAS Aviation Rulemaking Committee (sUAS ARC), established by the FAA in 2009 [60]. This report, in conjunction with the FAA’s later Notice of Proposed Rulemaking (NPRM), served as the foundation for determining proposed operational limits for the micro UAS class. Both documents propose certain restrictions for micro UAS, including operational limitations such as restricted speed, altitude, and flight within Visual Line of Sight (VLOS). Additionally, they emphasize physical requirements such as “frangible” designs intended to minimize harm in the event of a collision. While these recommendations reflect a risk-based approach to classification, the empirical, experimental, or statistical data used to define these weight thresholds are not clearly documented. This represents a transparency gap regarding the scientific basis of the thresholds used in UAV classification.
Furthermore, the FAA’s NPRM indicates that the “small UAS” category is intended to be subdivided into subcategories based on a more functional and risk-oriented approach. In this regard, the FAA is considering dividing systems under 24 kg into five subcategories according to their weight, operational capabilities, and the environmental contexts in which they operate. Similarly, the sUAS ARC report proposes an alternative classification scheme for UAS under 25 kg, emphasizing the need to create differentiated regulatory frameworks that reflect the diversity of these systems and their varied use cases. Thus, the U.S. classification approach is a multi-layered structure that takes into account not only technical thresholds but also the operational context in terms of safety, liability, and compliance (Table 2).
Table 2.
sUAS ARC classification scheme [50].
In recent years, technological advancements in digital communications, control systems, navigation, and autonomy have made these systems more accessible in terms of size and cost. These developments have enabled operational capabilities that were once only imagined. Nevertheless, the use of UAVs in professional applications beyond recreational activities remains limited. Existing regulations, particularly for operations requiring Beyond Visual Line of Sight (BVLOS), have been restrictive.
In recognition of these potential benefits, the Federal Aviation Administration (FAA) established a new regulatory framework under Part 107 of Title 14 of the Code of Federal Regulations (14 CFR), providing a legal basis for the routine operation of UAVs within the National Airspace System (NAS) [61]. This regulation restricts sUAS operations to unrestricted airspace up to 400 feet (approximately 122 m) above ground level or up to 400 feet above a fixed structure. Moreover, operations must be conducted within the Visual Line of Sight (VLOS) of the remote pilot in command (PIC) or a visual observer who is in effective communication with the PIC (pilot in command). While exemptions from the VLOS requirement can be granted in certain cases, transitioning to routine BVLOS operations will ultimately be essential to fully realize the potential of UAVs.
The most fundamental approach to UAV classification is based on the Maximum Takeoff Weight (MTOW). This method follows a structure similar to that used in piloted aircraft classification systems. The weight-based UAV classification adopted by the FAA is summarized in Table 3, with primary sources including FAA Order 7360.1B [43], recent regulations related to sUAS [61,62], and proposed rules for operations over people [63].
Table 3.
FAA UAS categorization by weight [24].
While weight-based classifications can provide some insight into the general performance and structural complexity of UAS systems, this approach is insufficient for fully capturing the multidimensional technical and operational characteristics of UAS platforms, such as operational capability, mission profile, navigation capability, or level of automation. Systems within the same weight class can exhibit substantial differences; this demonstrates that weight alone is not an adequate distinguishing factor.
Therefore, while weight serves as a useful initial classification criterion, the evolution of UAS technologies and operational scenarios underscores the need for more comprehensive and multi-criteria classification approaches.
2.2.2. EASA
The European Union Aviation Safety Agency (EASA) has introduced an innovative classification approach for UAV systems as part of its effort to define airworthiness requirements and shape the regulatory framework. This approach is articulated through the EASA Advance Notice of Proposed Amendment (A–NPA) and subsequent Policy Statement. Rather than adopting a purely mass-based, one-dimensional classification, EASA’s proposed framework is structured around a broader risk assessment perspective. In particular, it offers two alternative methods for evaluating how different types of UAVs should be treated under existing EASA Certification Specifications (CS), which are the European counterparts to systems, such as FAR Part 23 and Part 25.
The first approach (Proposal 1) proposes a comparison methodology based on the kinetic energy of UAS. In this method, the potential impact energy of UAV systems is compared with that of conventional manned aircraft, and the applicability of existing CS codes is evaluated for UAVs with similar energy profiles. This approach does not establish a direct classification scheme; instead, it uses “application zones” based on two potential collision scenarios (unexpected vertical descent and loss of control) to classify UAVs according to kinetic energy thresholds derived from tested levels in conventional aircraft. The goal of this method is to maintain consistency with existing systems while integrating UAVs into certification processes.
The second approach (Proposal 2) presents a more holistic safety assessment methodology. In this approach, not only mass but also parameters such as ground impact potential, lethal contact surface area, kinetic energy, and the environmental context of flight (e.g., population density) are considered. Based on these criteria, a redefinition of existing CS standards is proposed. Specific safety targets are established for each UAV platform and are then mapped to the appropriate certification requirements. However, this second proposal lacks detailed methodological explanations, leaving some uncertainty regarding its practical implementation [64].
The technical details of the kinetic energy-based classification approach are only partially documented in publicly available sources, and there is limited information about how the groups were formed. Based on available information, it is understood that EASA created a comparative sample set consisting of both conventional manned aircraft and various UAS-AC examples during this process. These examples were subjected to kinetic energy calculations based on two different collision scenarios—unexpected descent and loss of control—and the resulting kinetic energy values were plotted graphically for each aircraft. Subsequently, clusters were defined around the energy distributions of conventional aircraft, visually enclosed in “boxes.” The positional overlap of UAS-AC examples with these boxes allowed for a visual analysis of whether they shared similar kinetic energy profiles with conventional systems. In this way, it was indirectly determined under which CS (Certification Specification) each UAS should be evaluated.
By contrast, although EASA’s second proposal had not yet become a regulatory priority at the time, it offers significant methodological potential and a more comprehensive classification structure. This approach considers not only kinetic energy but also multidimensional risk factors such as ground effect, potential impact surface, and operational environment (e.g., population density). The second proposal outlines a five-stage evaluation system designed to provide a quantitative analysis of risk profiles for both conventional aircraft and UAS-AC examples. The resulting matching matrix enables the mapping of example UAV platforms to suitable certification requirements, representing a technical application of the risk-based classification concept.
In this regard, while the second proposal demands more calculations and data, it offers a strong framework for long-term regulatory sustainability by incorporating criteria based on operational safety as well as physical similarity.
For regulatory purposes, EASA proposes the establishment of three operational categories, each corresponding to distinct regulatory regimes [65]. Within the Open category, operations are further subdivided into subcategories according to varying risk levels. Each subcategory is defined based on the UAV class, the area of operation, and the competency of the remote pilot. UAV classes are primarily determined by Maximum Takeoff Mass (MTOM) or kinetic energy, while technical requirements such as electronic identification (ID) and geo-awareness (geo-fencing) are also taken into account (Table 4). The subcategories within the Open category are summarized in Table 5.
Table 4.
EASA UAS operation categorization [65].
Table 5.
EASA UAS open subcategories classification [65].
The review indicates that the EASA-proposed Open category broadly corresponds, in terms of aircraft size, to routine operations under the U.S. FAA Part 107 framework. However, the Open subcategories (Table 5) proposed by EASA appear to be more restrictive than the FAA’s corresponding categories with respect to operations over people, and they do not offer manufacturers the same degree of flexibility in meeting performance-based impact energy transfer standards through a wider range of design solutions [24].
2.3. A Review of Technical Approaches to UAV Classification
Clothier and colleagues [56] have conducted extensive research on UAV (UAS) regulations since 2006, focusing particularly on the quantitative assessment of risks through the concept of Equivalent Level of Safety (ELOS). Their early studies proposed the integration of systems engineering and statistical approaches to analyze the operational risks of UAS, while later work highlighted the fundamental role of classification within regulatory frameworks. In their 2010 and 2011 studies [52], the objective was to make aircraft certification processes more objective, systematic, and justifiable, advocating for classification processes to be supported by data-driven risk analyses.
In particular, the researchers evaluated the physical characteristics of more than 500 UAS using metrics such as kinetic energy and potential impact surface area, and proposed that classification should be restructured based on this empirical data. They emphasized that traditional classification systems are particularly inadequate for aircraft exceeding 20 kg, and through the use of more objective approaches and data clustering algorithms, derived more functional classes. Using this method, disproportionately large systems initially grouped in Category 4 were divided into five distinct clusters, demonstrating that more precise classification is achievable (Table 6).
Table 6.
Clothier et al. [56] kinetic energy classification scheme.
A study by Dalamagkidis, Valavanis, and Piegl [31] represents one of the pi-oneering scientific examinations of regulatory approaches for Unmanned Aircraft Systems (UAS), beginning around 2008, and particularly emphasizes the critical role of UAS clas-sification in the regulatory process. We have revised the sentence as follows: Dalamagkidis, Valavanis, and Piegl [31] represent one of the pioneering scientific contributions to regulatory approaches for Unmanned Aircraft Systems (UAS), dating back to around 2008. Their work notably underscores the pivotal role of UAS classification within the regulatory framework.
In their study, historical safety data from conventional aviation were used to establish Equivalent Level of Safety (ELOS) requirements for UAS, proposing that the fatality rate for ground collisions should be no greater than 1 × per year. Based on this, a risk model was developed utilizing the physical characteristics of UAS—such as size, weight, and kinetic energy—and it was argued that this model should be designed to remain within the accepted safety boundaries of conventional aviation.
Furthermore, the authors identified an approximately linear relationship between UAS mass and the required level of reliability, and recommended that classification be structured around MTOW. This risk analysis was subsequently refined by the authors in later years, supported by more detailed classification schemes [66] (Table 7).
Table 7.
Dalamagkidis et al. [66] initial classification scheme.
The study conducted by Fraser and Donnithorne-Tait [67] on behalf of the Canadian Centre for Unmanned Vehicle Systems aimed to develop an objective and mathematically rigorous approach to UAS classification (Table 8), proposing an internationally harmonized framework based on a mass-based risk metric. In this study, risk profiles were constructed by considering factors such as UAS mass, speed, reliability, and the population density of operational areas, with particular emphasis placed on the 500 kg mass threshold as a critical dividing line between unmanned and manned aircraft.
Table 8.
Fraser and Donnithorne-Tait [67] classification scheme.
This classification approach follows a data-driven and analytical foundation, aligning closely with the work of Clothier et al., and reinforces the central role of classification in regulatory development processes. The authors also identified that many existing and proposed UAS weight limits lack sufficient analytical or rational justification, strongly advocating for more scientific and data-focused approaches within regulatory processes.
In a comprehensive study on the integration of Unmanned Aircraft Systems (UAS) into civil airspace, Weibel and Hansman [30] developed a UAS classification scheme (Table 9). As part of the study, physical and performance data for a limited number of fixed-wing UAS were collected and analyzed, with the aim of identifying “natural threshold points” that could serve as the foundation for a classification system. Five distinct UAS classes were defined based on the research data and insights from the military literature; however, no specific airworthiness rules were established within the scope of this classification effort.
Table 9.
Weibel and Hansman [30] classification scheme.
Although the study does not provide a detailed methodological explanation of how the classes were determined, it is understood that the authors grouped class clusters through visual observation of performance parameters such as MTOW, range, altitude, and speed. Building on the work of earlier researchers such as Clothier and Dalamagkidis, an ELOS value corresponding to a fatality rate of 1 × per hour was calculated. Based on this value, prototype UAS models representing each class were used to map operational areas across USA population data. This mapping served to identify regions where the proposed classification would allow ELOS levels to be maintained.
A notable inconsistency can be observed in the methods used to develop various UAS classification schemes found in the literature and regulatory documents. Some classification efforts appear not to be grounded in systematic data analysis or statistical foundations. In such approaches, it is evident that empirical evidence or analytical tools were not utilized in defining classification criteria, and methodological justifications are lacking. In other cases, UAS data were examined visually, and clusters were defined based on graphical distributions derived from these data; however, mathematical modeling or algorithmic clustering techniques were not employed in these processes.
In contrast, more recent studies have increasingly adopted structured approaches that employ statistical analyses and algorithmic classification techniques in order to produce more objective and reproducible results. These methods enhance the methodological robustness of the classification process and offer a significant advantage in regulatory decision-making by promoting objectivity and explainability.
In structuring a classification system, the first step is to clearly define the underlying criteria or distinguishing features to be used. Once these criteria have been established, the threshold values—that is, the boundaries that will differentiate the classes—must be carefully determined. Defining these boundaries is a critical step that carries not only technical but also regulatory, economic, and operational implications. In this context, determining which UAV falls into which class translates into different rights, responsibilities, and financial obligations for manufacturers, designers, and operators. As such, class boundary determination is one of the most contested elements of the regulatory framework. However, there is currently no global consensus on the method or rationale that should be used to establish such boundaries.
An examination of the classification systems proposed in the existing literature and regulatory efforts reveals significant differences, particularly in the definition of weight-based thresholds. This diversity largely stems from the fact that the design parameters and operational capabilities of UAVs span a much wider range than those of conventional aircraft. This is directly reflected in the methods used to develop classification schemes (Figure 1). The approaches proposed in the literature generally fall into five basic categories [51]:
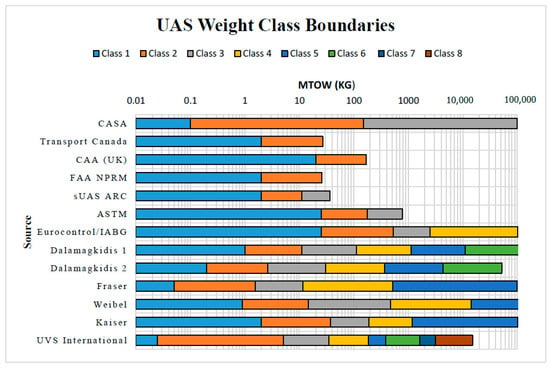
Figure 1.
UAS weight class boundary comparison based on current approaches [51].
- Directly adopting weight thresholds from conventional aircraft regulations;
- Adapting these thresholds specifically for UAVs;
- Proposing threshold values without empirical or scientific justification;
- Redefining thresholds based on various risk analyses;
- Defining thresholds based on naturally observed statistical clusters in existing UAV data.
Each of these approaches significantly shapes the structure and scope of the classification system. Therefore, the way in which class boundaries are determined is not merely a technical decision but a strategic choice that directly influences the integrity and effectiveness of the regulatory system.
A general assessment of existing classification schemes reveals a notable degree of diversity among the approaches adopted by different institutions and researchers. In particular, classification schemes developed by regulatory authorities frequently rely on weight-based thresholds derived from traditional aviation regulations, with certain limits (e.g., 25 kg, 150 kg, and 600 kg) being repeatedly used. However, it is often observed that these thresholds lack robust scientific or empirical justification, and in many cases, the methodological decisions underlying the classification process are not clearly documented.
In contrast, studies that employ statistical analyses of UAS data to identify natural groupings have revealed the existence of more refined class structures beyond the conventional standard weight thresholds. Practices such as simplifying the results of mathematical clustering and rounding them to convenient values raise questions regarding the scientific validity of the proposed classification schemes.
Another important point of debate concerns the determination of the appropriate number of classes to be used in a classification scheme. There is considerable variation in the number of classes proposed in literature. For example, some approaches suggest only three basic classes, while others propose five or six classes. Certain reports emphasize the need for more detailed subclassifications within weight ranges that are densely populated with small UAS, with some proposing as many as four distinct classes for systems under 25 kg.
This variability underscores the need for more granular classification to adequately reflect the structural, operational, and technological differences among small UAS within regulatory schemes. However, a careful balance must be struck between increasing the number of classes and avoiding excessive complexity in the classification scheme. It is worth noting that in many cases, this balancing process is not informed by systematic analyses, nor are mathematical decision-support methods sufficiently utilized.
Although the widely accepted 250 g threshold has been incorporated into the legal frameworks of many countries over time, the extent to which this threshold is scientifically grounded in terms of human safety remains a subject of debate. Previous classifications proposed by researchers such as Clothier [52], Dalamagkidis [66], and Fraser [67] have largely been based on systems engineering, mass, and kinetic energy-based risk analyses. However, many of these classifications focus primarily on larger and military UAS and do not sufficiently reflect the unique safety dynamics of very small UAS.
Similarly, researchers such as Weibel and Hansman [30] have proposed classifications based on MTOW and operational data; however, their approaches offer a more limited human-centered perspective compared to studies that directly address the likelihood of human injury or fatality.
In this context, the present study’s evaluation based on human safety-centered metrics seeks to scientifically question whether the 250 g threshold remains valid in light of current technological advancements and the growing diversity of micro-UAS. This represents a critical area of decision-making for regulatory frameworks.
3. Human-Centered Safety Criteria
In current civil aviation regulations, UAVs under 250 g are generally considered “harmless” and are often exempt from regulatory requirements. However, due to technological advancements, UAV models within this segment are rapidly increasing in speed, maneuverability, and structural resilience, necessitating a reassessment of existing thresholds from a human safety perspective. In this context, the Blunt Criterion (BC) model, which is widely used in sectors such as the automotive and defense industries to estimate injury severity based on UAV mass and impact velocity, has emerged as a valuable tool. The BC model is an empirical method that predicts injury severity based on parameters such as the kinetic energy of the impacting object and its contact area. The use of such criteria allows for a more scientific and realistic evaluation of evolving UAS technologies within the existing regulatory framework.
Accordingly, this study aims to reassess the widely adopted 250 g threshold in light of human-centered safety criteria, considering the latest generation of UAV models with advanced aerodynamic, structural, and performance characteristics. The study combines metrics from literature, including Blunt Criterion (BC), Viscous Criterion (VC), the Abbreviated Injury Scale (AIS), and kinetic energy-based indicators—to analyze the validity and relevance of current regulatory approaches and thresholds.
This comprehensive approach will enable a realistic evaluation of modern UAV systems, which feature diverse structural designs and collision dynamics, and will contribute to grounding both current and future air traffic management and safety policies on a more scientific basis.
3.1. Kinetic Energy
Kinetic energy is the energy possessed by an object in motion and serves as a fundamental parameter for determining the potential injury risk to the human body upon collision. Kinetic energy is defined by the following general equation [51]:
Here, E represents kinetic energy (Joules), m denotes mass (kg), and v is velocity (m/s).
Kinetic energy measurement is widely used to estimate the maximum force and potential damage a UAS may impart upon impact [68]. This criterion serves as a significant reference in regulatory assessments due to its applicability across different aircraft types and its practicality during the design process. However, when considered in isolation, kinetic energy cannot comprehensively capture all risk factors without accounting for other variables such as structural shape and fragility.
Burke [69] addresses key challenges in calculating kinetic energy at the moment of impact. The mass of a UAV may vary depending on configuration and during the flight itself, while velocity fluctuates as potential energy is converted into kinetic energy during descent, thereby complicating the calculation. Burke recommends using the UAV’s MTOW in kinetic energy calculations.
For UAVs, airspeed directly influences the risk posed both to airborne objects and to people and property on the ground in relation to impact forces. UAVs can operate at speeds outside the typical range of conventional aircraft—both significantly lower and higher—which introduces a wider operational envelope and necessitates different design standards. Moreover, airspeed is directly related to the vehicle’s ability to detect its environment and avoid collisions. The fact that airspeed is a measurable and technically defined parameter makes it a practical variable for setting operational constraints. In particular, for lightweight UAVs, airspeed may serve as an indicator of collision severity alongside mass.
As a function of both speed and mass, kinetic energy plays a critical role in predicting potential damage upon impact. This characteristic makes kinetic energy a more informative metric than purely mass-based approaches. Nevertheless, despite this advantage, kinetic energy calculations are complex in practice. Since velocity continuously changes during flight, it must be modeled using either average or maximum values. In addition, potential energy (altitude) should also be taken into account. The nature of the collision—whether elastic or inelastic—and the degree of structural frangibility will also determine the final level of damage. Therefore, a multidimensional assessment that includes the energy components and characteristics of the impacted area provides a more accurate evaluation than relying solely on kinetic energy.
In this study, to simplify the analysis and provide a focused evaluation, UAVs are assumed to be fully rigid (non-frangible) structures. Thus, during a collision, the UAV’s energy is considered to act solely upon the human body, excluding the responses of other impacted objects (such as buildings, vehicles, or infrastructure elements) and potential secondary effects (collapse, explosion, etc.) from the model. Furthermore, it is assumed that impacted objects are inert and that no additional dynamics influencing energy transfer are present in the system. This approach is intended to focus specifically on the relationship between UAVs and human injury, providing clear insights within the scope of human-centered safety criteria.
3.2. Blunt Criterion (BC)
The Blunt Criterion (BC) is a long-established parameter used in the biomechanical assessment of blunt impacts, particularly to the thoracic (chest) region. The parameter is fundamentally based on research conducted in the 1970s under the sponsorship of the U.S. military, during which existing blunt impact injury data for the thorax were systematically collected and correlated [70]. The resulting five-parameter model was later expanded and standardized in subsequent studies [71].
In this equation, m [kg] represents the mass of the impacting object, v [m/s] its velocity, D [cm] its diameter; W [kg] denotes the mass of the impacted object (target body), and T [cm] represents the thickness of the body wall. Figure 2 provides a visual representation of the impact scenario and the associated parameters.
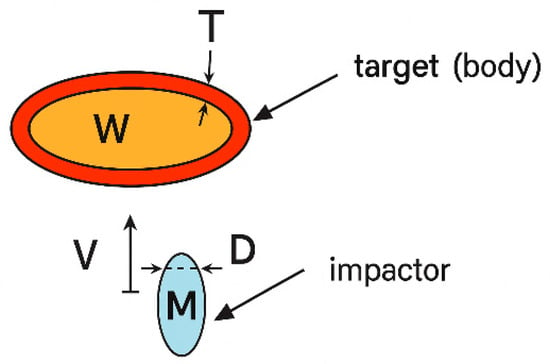
Figure 2.
Physical parameters for the BC [72].
BC, in line with the prevailing contemporary understanding, acknowledges that impact energy alone is not a sufficient predictor of injury severity. BC relates the kinetic energy of the impacting object to the tolerance capacity of the target body. In the equation, the numerator represents the kinetic energy of the impacting object, while the denominator provides a semi-empirical expression of the body’s (or the relevant body region’s) capacity to absorb this energy. In this scaling process, body mass and the thickness of protective tissues surrounding vulnerable organs (such as ribs and soft tissues) are considered. In addition, the diameter of the impacting object is incorporated into the model as a critical parameter defining the contact area during energy transfer. Originally developed for assessing thoracic impacts, the BC criterion has more recently also been applied to impacts involving the head region [73].
From the perspective of aircraft safety certification, a study [74] employed blunt ballistic impact-based biomechanical models to evaluate the injury potential of small UAVs up to 15 kg. The study demonstrated that injury severity from UAV impacts on the human body is directly related to both the kinetic energy at the moment of impact and the diameter of the component in contact with the body.
Using the empirical BC developed by Bir and Viano [75], the relationship between aircraft mass and injury severity was evaluated. BC essentially scales kinetic energy according to the impact area, the mass of the impacting object, and the thickness of the target’s body wall. VC is also proposed as an effective metric for evaluating the risk of impact-induced injuries. These criteria have been noted to make important contributions toward the development of safer and more controlled non-lethal munitions.
Radi [72] developed a model for predicting the severity of UAV-induced blunt impacts based on BC and proposed several safety design recommendations. According to this study, an impact by a 400 g drone traveling at 15 m/s (approximately 40 J of kinetic energy) was identified as reaching the threshold for serious injury. Burke [69], in a separate study, suggested that an impact involving a 2 lb (approximately 907 g) object and 66 J of kinetic energy could be considered “non-lethal”.
3.3. Viscous Criterion (VC)
Injuries caused by impacts from small objects have been extensively studied in the literature for many years [76,77,78,79]. These studies cover a broad range of scenarios, including impacts from small-caliber bullets and explosive fragments, debris from accidents, non-lethal (less-lethal) munitions, sharp and penetrating melee weapons, behind-armor trauma, and sports-related impact injuries [25]. Viano and King [80] provided a comprehensive review of the biomechanics of impacts to the chest and abdominal regions.
One of the key findings emerging from this extensive body of literature is that mass and kinetic energy alone are insufficient to predict injury severity. Different regions of the human body respond differently to impact forces, and injuries are primarily associated not with the total kinetic energy of the impacting object, but with the amount of energy absorbed by body tissues.
Accordingly, more accurate and experimentally validated models have been developed. For assessing UAV-induced chest impacts, an appropriate model is the VC parameterization proposed by Viano and Lau [81], which is based on a lumped-mass model of the ribcage. In this model, VC is defined as the ratio of the chest compression velocity to the compression depth. The value of the VC parameter calculated for a given impact has been shown to strongly correlate with injury severity. VC is used to evaluate the risk of internal organ damage from an impact to the chest, accounting for both the velocity of impact and the degree of chest deformation [81].
Here, v(t) represents velocity, and C(t) denotes chest deformation.
The VC value is essentially calculated based on a given kinetic energy and velocity. Assuming an impact scenario directed at the thoracic (chest) region, it is assumed that the total kinetic energy (E) at the moment of impact is entirely absorbed by the ribcage. In this case, the kinetic energy can be expressed as follows:
Here, c is a damping coefficient (dashpot parameter) typically ranging around 500 N/(m/s), representing the viscoelastic properties of the ribcage. v denotes the velocity at the moment of impact, while d corresponds to the amount of deformation occurring in the ribcage as a result of the impact.
Kinetic energy is also calculated using the classical formula (1/2)·· 2. By equating these two expressions, it is demonstrated that the deformation amount (d) is directly related to the mass (m) of the impacting object, the impact velocity (v), and the damping coefficient (c):
This relationship demonstrates that the amount of deformation experienced by the ribcage depends on both the kinetic energy of the impacting object and the biomechanical properties of the ribcage; it also forms the fundamental basis for calculating the VC parameter.
At the peak of the impact, this is measured as V which is defined as follows:
Here,
- E: Kinetic energy (Joules)
- c: Dashpot parameter (≈500 N/(m/s))
- D: Chest depth (typically ≈ 0.25–0.30 m for an adult)
Similarly, the BC model [53] is used to predict the severity of blunt impact-related injuries based on the ratio of the impact’s kinetic energy to the physical characteristics of the target tissue (mass, thickness, contact area). These models constitute key methodological components of contemporary studies evaluating the injury risk posed by UAVs to the human body.
3.4. AIS (Abbreviated Injury Scale)
One of the most widely used anatomical scales for quantitatively assessing the severity of traumatic injuries is the Abbreviated Injury Scale (AIS). Internationally recognized, this scale was developed by the Association for the Advancement of Automotive Medicine to classify specific individual injuries and to define the level of threat these injuries pose to life [82]. First introduced in 1971, AIS has become one of the most commonly used tools for classifying injuries based on medical diagnosis [81]. AIS systematically categorizes types of injuries according to their severity level, and this classification is also directly correlated with the probability of survival.
AIS does not measure the overall clinical severity of an injury but rather its relationship to life-threatening potential. The scale ranges from one to six, with the lowest level (AIS = 1) representing minor injuries that typically do not require medical intervention, and the highest level (AIS = 6) indicating a 100% probability of fatality, as shown in Table 10 [83,84]. Injuries classified at AIS ≥ 3 are clinically considered life-threatening.
Table 10.
Abbreviated Injury Scale [84].
Therefore, incorporating the AIS scale as a reference alongside VC and BC criteria will become an important practice in assessing the potential injury effects of UAV impacts.
The relationship between BC and AIS is defined through a direct mathematical equation [75]:
The kinetic energy (E) required for calculating the BC value can be derived from Equation (1) and computed using the following fundamental formula [71]:
Here,
- k is a gender-based constant → typically 0.6 for females and 0.7 for males.
- W is the body mass of the impacted person (expressed in kg).
- D is a measurement, such as of chest wall thickness or diameter (expressed in cm).
- exp(BC) is the exponential function of the BC value.
This formula demonstrates that as the BC value increases, the required kinetic energy grows exponentially. When used together, these two formulas [(7) and (8)] allow the calculation of kinetic energy (E) based on a given AIS value.
As a result, this method enables the scientific prediction of injury severity and the required kinetic energy for a UAV impact through the transformation AIS → BC → E. In other words, once the BC value at the moment of impact is known, the corresponding AIS level—indicating injury severity—can be easily determined. The AIS scale ranges from one to six and specifies the severity of injury that may occur in the body. In this context, a higher BC value corresponds to a more severe and higher-risk injury level (AIS value).
By applying this relationship, it is possible to perform a risk analysis from a human safety perspective based on the measured or calculated BC value for UAV impacts, allowing for the prediction of potential injury effects. Accordingly, UAV design criteria and operational limits can also be shaped based on such biomechanical thresholds.
In an assessment conducted by the Range Safety Group Risk Committee [85], it was suggested that a kinetic energy threshold of 33.9 J (25 ft-lb) is applicable to prevent fatal injuries (AIS Level 4) caused by debris impacts. Furthermore, a lower threshold of 14.9 J (11 ft-lb) was deemed suitable for preventing serious but survivable injuries (AIS Level 3). Both of these thresholds are interpreted in the literature as representing a 1% probability threshold—meaning there is a 1% likelihood of an AIS Level 3 or 4 injury occurring as a result of the impact.
4. Methodology
In this study, based on the VC, BC, and AIS models proposed in the existing literature, the potential injury effects of small Unmanned Aerial Vehicles (UAVs) under 250 g on the human body were comprehensively evaluated. With the rapid increase in the number of lightweight and commercially available UAVs released in recent years, the question of whether such UAVs can still be considered “harmless” has regained importance. These UAVs, often classified as “harmless,” are typically exempt from aviation regulations or flight restrictions in many countries. Furthermore, they are generally not subject to mandatory registration or tracking requirements, which limits oversight and accountability. However, global trends indicate that the most significant growth in UAV usage is occurring within this segment of sub-250 g drones. This widespread and relatively unregulated use raises important concerns regarding safety, public awareness, and the adequacy of current classification systems based solely on weight.
In this context, velocity, mass, and kinetic energy data from various UAV models were used to calculate VC and BC values, which were then compared against corresponding AIS threshold levels. The commonly referenced thresholds of 14.9 J, 25 J, and 33.9 J found in the literature were considered to assess their applicability to modern UAVs under 250 g. It was assumed that UAVs impact the human body at their maximum velocities, as specified in Appendix A. Scenarios such as free-fall or loss of control—where additional vertical or horizontal acceleration might occur due to flight altitude and aerodynamic factors—were intentionally excluded from the analysis. This assumption was made to maintain methodological consistency and to enable a standardized evaluation of kinetic energy levels against the commonly accepted threshold values of 14.9 J, 25 J, and 33.9 J found in literature.
To simplify the analysis, it was assumed that the UAVs were rigid (non-frangible) and that the entirety of the impact energy was transferred to the human body. Secondary environmental effects during collisions were not considered. As a related limitation, the study does not include any experimental or real-world validation of the predicted injury outcomes. While the analysis is based on established human-centered metrics such as KE, BC, and VC, the results remain theoretical and have not yet been empirically confirmed through physical testing or observational data.
The overall analysis was structured according to a four-stage methodological framework, as schematically illustrated in Figure 3. This figure presents the sequential flow of the study’s core analytical steps, from kinetic energy calculation to injury severity prediction. In addition, Figure 4 provides a schematic representation of the human-centered safety metrics employed throughout the study, including KE, BC, VC, and AIS. These metrics serve as the foundation for evaluating potential injury outcomes. The details and rationale for each stage and metric are explained in the sections below.
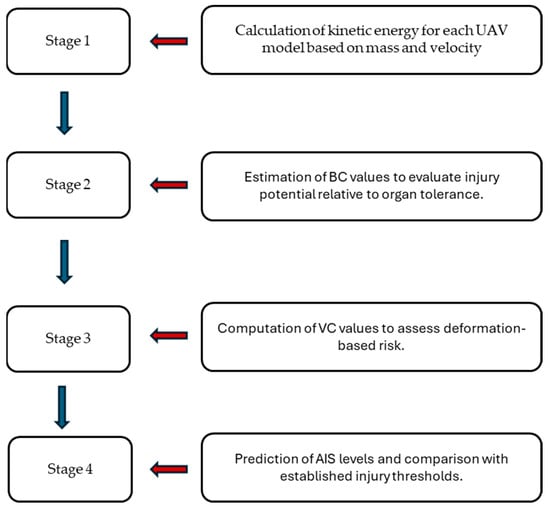
Figure 3.
Schematic representation of the four-stage methodological framework.
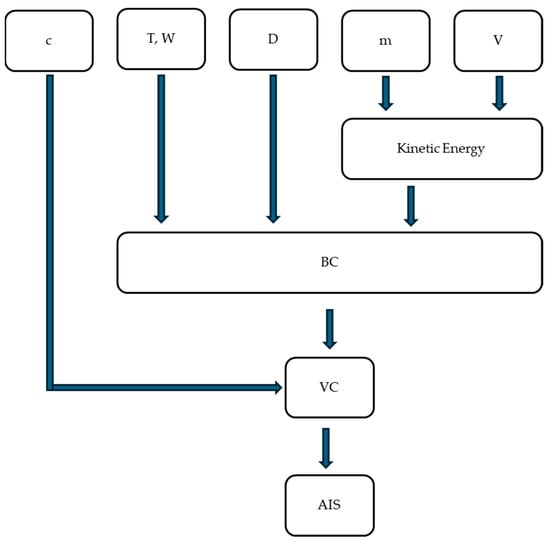
Figure 4.
Schematic representation of the human-centered safety metrics employed in the study.
In the first stage, for each UAV model, mass (m), maximum flight speed (V), and relevant geometric parameters (e.g., contact diameter D) were used to calculate kinetic energy using Equation (1). Under the assumption that UAVs are fully rigid and non-frangible, it was accepted that the entire amount of kinetic energy (KE) would be transferred to the human body upon impact. This simplifying assumption allowed us to apply a consistent and controlled framework for injury risk assessment. Scenarios involving free-fall or loss of control—where additional vertical or horizontal acceleration could occur due to flight altitude, gravitational forces, or aerodynamic effects—were deliberately excluded from the scope of the analysis. The decision to omit these dynamic conditions was made in order to maintain methodological consistency and focus on a standardized evaluation of kinetic energy across various UAV models. This also ensured comparability with widely accepted injury threshold values found in the literature, particularly 14.9 J, 25 J, and 33.9 J, which are commonly used to represent serious, harmless, and severe injury risks, respectively.
Kinetic energy was used as a central metric in the study because it is directly associated with the mechanical energy transferred during impact, and serves as a fundamental parameter in existing injury models such as AIS, BC, and VC. Its quantifiable nature also allows for direct comparison across UAV types, regardless of their structural or operational differences.
In the second stage, BC values were calculated for each UAV. BC is based on the principle of scaling KE against the tolerance capacity of target organs and was computed using Equation (2). Here, W represents the mass of the target body region (assumed to be a 70 kg male in this study), and D is the UAV impact diameter (set at 2 cm). The BC → AIS level mapping was performed using the mathematical relationship defined in Equation (7), which provides a validated correlation between blunt criterion values and injury severity levels.
BC was selected in the study because it provides a simplified yet effective method for translating kinetic energy values into injury severity estimates. Its formulation allows for the incorporation of both impact energy and anatomical vulnerability, making it particularly useful for evaluating the potential risk of blunt trauma from UAV impacts. Additionally, BC has been widely used in prior UAV safety research, enabling comparability with existing studies and supporting the validity of the current analysis.
In the third stage, the VC parameter was evaluated using Equation (6), which models the relationship between kinetic energy and viscous response to estimate thoracic injury risk. VC is used to estimate injury risk based on the rate of body deformation and is particularly applicable for the chest (thorax). While other body regions—such as the head and extremities—may also be at risk during UAV-related impacts, the study focuses on thoracic injuries due to the availability of well-established biomechanical criteria (i.e., BC and VC) specifically calibrated for the chest.
Here, c, representing the dashpot parameter for the viscous resistance of body tissue, was set at 500 N/(m/s). The VC value was modeled in relation to KE and calculated for each UAV.
VC was chosen in the study because it captures the dynamic response of soft tissues during high-rate impacts, which is particularly relevant in UAV collision scenarios involving the thoracic region. Unlike energy-based models alone, VC accounts for both deformation velocity and tissue damping characteristics, providing a more physiologically accurate representation of potential injury. Its inclusion complements the BC model by offering an additional dimension of injury assessment, especially in scenarios where time-dependent deformation plays a critical role.
In the final stage, AIS levels were directly predicted using the calculated KE, BC, and VC values. The resulting AIS levels were compared against widely accepted thresholds in the literature: 14.9 J (AIS ≥ 3, serious injury), 25 J (harmless threshold), and 33.9 J (AIS ≥ 4, severe and potentially fatal injury). Based on these thresholds, injury profiles of UAVs were derived, and the effectiveness of the current 250 g mass limit was re-evaluated in this context.
AIS was selected as the reference injury classification system because it provides a standardized and internationally recognized method for quantifying injury severity. Its ordinal scale enables the translation of biomechanical parameters into clinically meaningful outcomes, which is essential for informing policy decisions, regulatory thresholds, and public safety assessments. By using AIS, the study bridges the gap between technical UAV impact metrics and real-world human injury implications.
Throughout the analysis, a comprehensive dataset of commercial UAV models under 500 g was used, with a particular focus on the sub-250 g segment. The analysis was conducted using Python 3.11, with pandas version 2.1.4 and matplotlib version 3.8.2. Additionally, results were visualized with kinetic energy vs. AIS, kinetic energy vs. BC, and kinetic energy vs. VC graphs. This methodology supports the development of more precise, energy-based, and mission-oriented regulatory approaches within the scope of human-centered safety criteria (Figure 3).
The objective is to objectively determine whether UAVs under 250 g pose a risk of causing serious injury in collision scenarios. This analysis is important both for re-evaluating the validity of the current 250 g mass threshold and for contributing to the development of future regulatory frameworks.
Unlike many earlier studies that focus on theoretical models or limited prototype data, this research directly addresses a current gap in the literature by systematically analyzing a wide range of actively marketed, lightweight commercial UAVs. Given the rapid growth and widespread use of sub-250 g drones in professional, industrial, and recreational applications—particularly in 2024–2025—the study offers timely and practical insights.
Moreover, by presenting a clearly structured, multi-stage methodology based on well-established human-centered injury metrics (KE, BC, VC, and AIS), the study serves not only as an analytical contribution but also as a methodological reference for future research in the field. The transparency and replicability of the approach can guide other researchers in designing similar risk-based assessments for UAVs or other emerging technologies. Finally, the findings derived from this analysis are expected to be of direct relevance to a broad range of stakeholders, including regulatory authorities, drone manufacturers, academic researchers, and public safety policymakers. By providing an evidence-based framework for evaluating UAV-related injury risks, the study can inform safer design practices, support regulatory decision-making, and contribute to the responsible integration of UAVs into airspace and society.
5. Dataset
In the present study, an up-to-date dataset of UAVs under 500 g was compiled in order to enable a human safety–focused evaluation. As in similar studies in the literature, information was gathered from commercial sources (manufacturer data, product catalogs, open databases, video analyses, etc.) and existing scientific publications. However, in contrast to previous studies, this work is not limited to toy-class UAVs; rather, it includes all commercially produced and utilized UAV models under 250 g available on the global market as of 2025. This ensures that the recent diversification and performance improvements observed in this class of UAVs are also taken into account.
For the UAVs included in the dataset (Appendix A), mass and maximum speed data were obtained directly from technical specifications or manufacturer documentation. In cases where maximum speed data were unavailable, estimated values were derived using methods consistent with those recommended in the literature (e.g., video analyses, comparisons with similar models, and expert judgment). The uncertainty associated with speed and mass parameters was carefully evaluated to ensure the validity of the study, and outlier values were excluded from the model through expert review. Additionally, only typical cruising speeds achievable during powered flight were considered for the analysis; free-fall or aerodynamically brake-decent speeds were excluded from the scope.
6. Analysis
As illustrated in the four-stage analytical framework presented in Figure 3, the injury risk assessment was conducted using the human-centered safety metrics shown in Figure 4. Based on the technical specifications of commercially available UAVs listed in Appendix A, we calculated key parameters—including KE, BC, VC, and AIS values—to evaluate the potential harm posed by sub-250 g UAVs.
In the first stage, the kinetic energy (KE) values for each UAV model were individually calculated using Equation (1). In the subsequent stages, the calculated KE values were used to compute the corresponding BC and VC values, following the methodology defined in Equations (2) and (6), respectively. These calculations were based on the assumed parameters detailed in the methodology section (e.g., body mass W, impact diameter D, and dashpot constant c). Finally, AIS levels were derived by comparing the results with widely accepted threshold values (14.9 J, 25 J, and 33.9 J), as described in the literature, Equation (7).
This stepwise application of the evaluation metrics ensures consistency with the flow model introduced in Figure 3 and allows for a standardized risk-based classification of UAVs under 250 g. Furthermore, the results obtained from the KE, BC, VC, and AIS calculations were comparatively analyzed to identify patterns, evaluate consistencies across metrics, and draw meaningful conclusions regarding UAV safety classification thresholds.
As a first step, we compared the calculated KE values with the corresponding AIS thresholds to assess the potential severity of injuries associated with each UAV model.
According to the analysis results presented in Figure 5, the majority of UAVs under 250 g generate kinetic energy levels that fall below the 25 J threshold, which is commonly associated with the “harmless” classification. Additionally, most of these UAVs also remain under the 33.9 J threshold, which is linked to the risk of serious or potentially fatal injury.
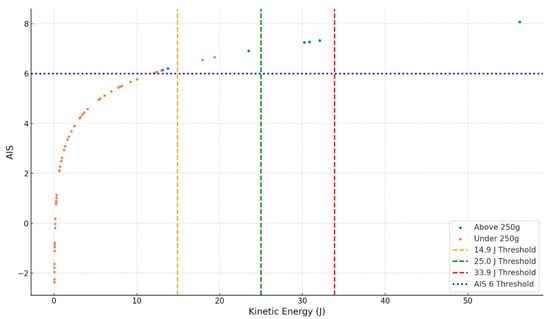
Figure 5.
Relationship between kinetic energy (J) and AIS levels.
Furthermore, it was generally observed that UAVs in this category did not exceed the 14.9 J threshold, which corresponds to AIS Level 3 (serious injury).
However, it is noteworthy that some modern mini drone models weighing 249 g and capable of reaching higher speeds—such as 10 m/s or 12 m/s—approach or, in certain cases, exceed these thresholds. In contrast, exceedances of the 33.9 J threshold were observed predominantly among drones exceeding 250 g, reaffirming the significant influence of both mass and velocity on injury risk.
As a second step, the calculated BC and VC values were compared to assess their alignment with established safety thresholds. The analysis results examining the relationship between kinetic energy and the BC (Figure 6) and VC (Figure 7) parameters indicate that UAVs under 250 g are largely consistent with current “harmless” threshold values. In terms of BC values, the expected trend—an increase in BC with rising kinetic energy—was confirmed. Distinct separations were observed around the 14.9 J, 25 J, and 33.9 J thresholds, with the majority of sub-250 g UAVs remaining below these limits.
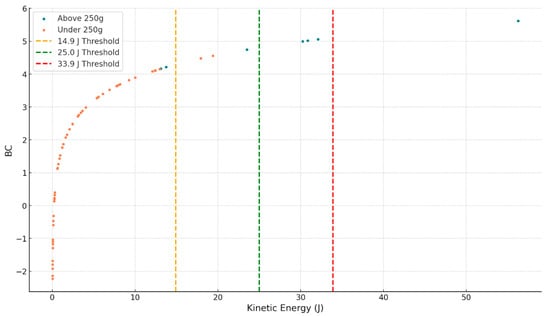
Figure 6.
Relationship between kinetic energy (J) and BC.
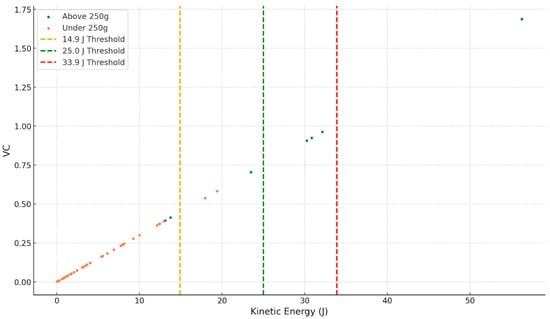
Figure 7.
Relationship between kinetic energy (J) and VC.
However, certain new-generation Mini series drones and high-speed specialized drone models approach these thresholds, and in particular, some scenarios were identified that may pose a threat to the 33.9 J limit.
These findings suggest that while the sub-250 g UAV category generally adheres to existing safety assumptions, technological advancements in propulsion systems and structural design—particularly in newer high-performance models—are beginning to challenge the boundaries of these thresholds. This highlights the need for periodic reassessment of “harmless” classifications, as certain commercial UAVs may now possess the kinetic capacity to exceed traditionally accepted injury limits under specific conditions. Such developments reinforce the relevance of integrating energy-based risk metrics into future regulatory frameworks.
A similar trend was observed for the VC parameter. VC values also increase in parallel with kinetic energy, and overall, UAVs under 250 g generally remain below the 25 J and 33.9 J thresholds for this parameter as well. However, certain high-speed and lightweight small drones were found to have the potential to impose significant loading on the chest region in terms of VC.
In conclusion, with respect to both BC and VC metrics, a substantial proportion of UAVs under 250 g still conform to the “harmless” category. Nevertheless, with rapid technological advancements leading to mini drones equipped with more powerful motors and higher speed capabilities, some models are approaching levels that may pose a risk of AIS-3 or higher injuries. This highlights the need to re-evaluate existing mass and energy thresholds and to develop a more dynamic approach that aligns with current market trends.
VC is a biomechanical parameter that evaluates injury risk based on the rate and extent of chest wall deformation. In blunt impact scenarios such as UAV collisions, the deformation rate of soft tissues and bony structures in the torso region is a critical factor directly influencing injury severity. The AIS serves as a clinical measure of the outcomes of such deformations on the human body.
As a third step in the analysis, the relationship between VC values and corresponding AIS levels was examined to assess how thoracic deformation metrics translate into clinically relevant injury classifications.
According to the analysis results, a positive relationship was observed between VC values and AIS levels (Figure 8); as the VC value increased, the corresponding AIS level also tended to rise. This finding supports the notion that higher deformation rates lead to more severe traumatic injuries. In particular, the majority of drones under 250 g exhibited low VC values, with very few models exceeding the AIS 3 threshold for VC. Nonetheless, some high-speed Mini UAVs recorded VC values approaching levels associated with a potential risk of serious thoracic trauma. This demonstrates that the VC parameter is an effective indicator for assessing torso injuries resulting from UAV impacts.
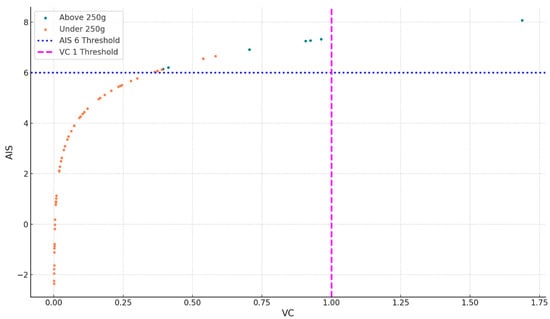
Figure 8.
Relationship between AIS and VC.
These results emphasize the importance of incorporating VC-based evaluation into UAV safety assessments, particularly for potential thoracic injuries. Although most sub-250 g UAVs currently remain within acceptable deformation risk levels, the presence of edge-case models approaching clinically significant thresholds underlines the need for proactive monitoring as UAV speeds and structural capabilities evolve. Integrating VC into design considerations and regulatory frameworks could serve as an early warning system for identifying models that, while light in mass, may pose disproportionate biomechanical risks due to their kinetic profiles.
As a third step, the relationship between BC values and corresponding AIS levels was examined to evaluate how kinetic energy distributed over body mass correlates with injury severity classifications.
BC is an empirical measure developed to estimate the effects of blunt impact energy on the human body, taking into account kinetic energy, contact area, and the physical characteristics of the body wall. In UAV impact scenarios, the BC value directly reflects the target tissue’s tolerance to blunt force trauma. The AIS scale, in turn, qualifies the clinical outcomes of this interaction.
The analysis results demonstrate a strong and positive correlation between BC values and AIS levels (Figure 9). It was clearly observed that as BC values increased, AIS levels also rose. This relationship particularly highlights that high-speed UAVs with small contact areas (such as compact and fast Mini series drones) carry a significant potential for causing serious injuries to the torso.
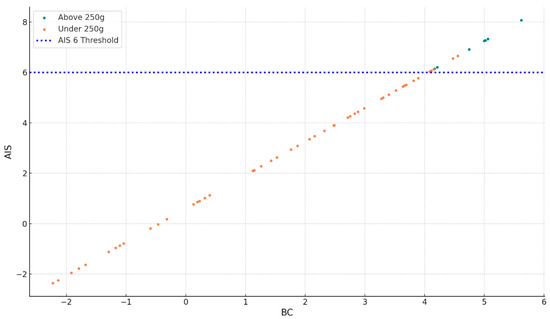
Figure 9.
Relationship between AIS and BC.
According to the BC parameter, the majority of UAVs under 250 g remained below the injury threshold corresponding to AIS Level 3 and above; however, some modern, high-speed small UAVs exhibited BC values that either approached or exceeded this threshold. Therefore, BC serves as a reliable and complementary parameter for injury assessment based on kinetic energy.
Evaluation of KE, VC, and BC values in relation to AIS thresholds provides a comprehensive understanding of injury potential in sub-250 g UAVs. While the majority of UAVs in this category generally fall within “harmless” limits under nominal conditions, the data reveal that certain modern, high-speed, and compact UAVs pose a non-negligible risk, especially in scenarios involving direct chest impacts or concentrated force transmission. Each metric contributes a unique perspective: KE reflects the raw mechanical energy of impact; BC accounts for distributed force over body mass and contact area; VC captures the deformation dynamics of soft tissues. Their combined application enhances the resolution and clinical relevance of UAV injury risk assessments, reinforcing the need for energy-aware regulatory approaches in UAV classification and safety policies.
Risk-Based Classification for Lightweight Drones
Based on the dataset provided in Appendix A, which includes detailed physical and performance characteristics of 62 drones, a human-centered assessment was conducted to evaluate potential injury severity in the event of collisions. This evaluation employed a multi-metric approach, considering KE, AIS, BC, and VC within established safety thresholds.
In accordance with literature-based impact injury criteria, three primary kinetic energy thresholds were considered: 14.9 J (AIS-3, indicating serious injury), 25 J (designated as the upper limit for harmless operation), and 33.9 J (AIS-4, representing severe injury). Additionally, an AIS score of six was used as a critical marker for life-threatening trauma. By integrating these thresholds with the physical profiles of drones under 250 g, a UAV risk classification scheme was developed and proposed, as presented in Table 11.
Table 11.
Risk-based classification of drones under 250 grams.
Low-Risk Class (Green): Drones in this category are characterized by low mass and velocity, yielding minimal kinetic energy and negligible injury potential. Their AIS scores are typically below two. These UAVs are suitable for indoor or recreational use and present minimal threat to bystanders.
Medium-Risk Class (Orange): These drones exhibit moderate kinetic energy and AIS scores, indicating a tangible risk of serious injury. Most fall within the 200–249 g range and are capable of achieving moderate speeds. Operational restrictions such as low-altitude flight and propeller guards are recommended.
High-Risk Class (Red): UAVs in this category pose a severe injury risk (AIS ≥ 6), often associated with both elevated kinetic energy and high-speed impact profiles. They demand strict operational limits, certification, and controlled airspace usage to mitigate harm to people.
Anomaly Risk (Purple): Despite having an AIS score below six, these drones exhibit excessive kinetic energy, often surpassing 50 J. This class warrants special regulatory scrutiny due to its hidden but significant collision potential.
This visualization establishes a risk-based framework for drone classification that is more nuanced than traditional weight-based models, as shown in Figure 10. It empowers aviation authorities, manufacturers, and operators to
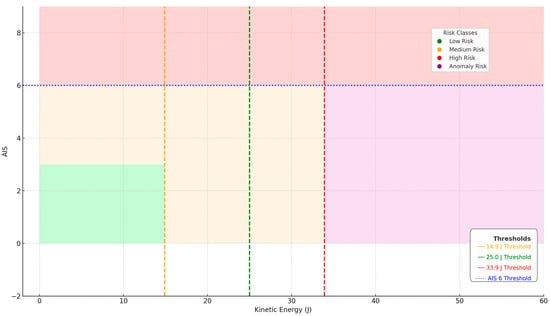
Figure 10.
Human-centered risk classification of lightweight drones.
- Implement graduated regulatory measures based on impact potential
- Encourage the development of injury-mitigating technologies (e.g., speed limiters and propeller guards)
- Prioritize public safety using a scientifically grounded approach
A corresponding visualization (Figure 11) is presented below, illustrating the KE vs. AIS relationship with color-coded classification zones.
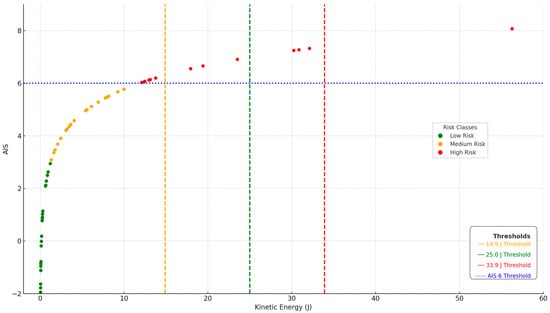
Figure 11.
Risk classification map of UAVs based on KE and AIS.
This analysis clearly demonstrates that drones under 250 g are not inherently low-risk. In particular, some lightweight drones can attain high kinetic energy due to their speed, resulting in a substantial potential for severe injuries. Consequently, regulatory frameworks should not rely solely on mass-based thresholds, but rather adopt impact-driven criteria such as KE and AIS values.
The presented classification and accompanying visual analysis provide a concrete, data-informed foundation for regulators, manufacturers, and operators to make more nuanced and safety-conscious decisions regarding UAV deployment.
According to this classification, out of 62 UAVs:
- A total of 23 drones classified as Low Risk
- A total of 20 drones are classified as Medium Risk
- A total of 19 drones are classified as High Risk
The analysis clearly demonstrates a significant distinction in both KE and AIS between drones weighing under and over 250 g. Results confirm that drones exceeding the 250 g threshold tend to exhibit substantially higher kinetic energy values and AIS scores, reflecting a heightened potential for serious injury in collision scenarios.
However, it is important to underscore that weight alone does not determine safety. As previously illustrated through energy-based risk zoning, a number of drones under the 250 g limit are still capable of generating kinetic energies and impact forces that exceed critical injury thresholds. Thus, a reliance solely on mass-based criteria may overlook key risk dimensions.
Consequently, these results advocate for a more nuanced, multi-metric regulatory framework, where drone classification and restrictions are informed not only by mass, but also by dynamic parameters such as speed, kinetic energy, and biomechanical injury potential. This integrated approach would better align regulatory oversight with actual risk, thereby enhancing both public safety and operational fairness.
7. Conclusions
According to the analysis based on the kinetic energy vs. AIS graph, the majority of UAVs under 250 g currently available on the market remain consistent with established “harmless” threshold values. However, it has also been shown that recently developed mini drone models exhibiting high-speed performance are beginning to challenge these thresholds. Consequently, the continued relevance of current thresholds and the associated safety policies must be re-evaluated, particularly in light of this rapidly evolving product segment.
In this study, a comprehensive and risk-based assessment was conducted for UAVs under 250 g using human-centered injury metrics. The analysis was based on Kinetic Energy (KE), Blunt Criterion (BC), Viscous Criterion (VC), and the Abbreviated Injury Scale (AIS). According to our findings, the vast majority of sub-250 g UAVs currently on the market remain below the 25 J “harmless” threshold and the AIS-3 (~14.9 J) serious injury limit. However, an increasing number of high-speed, next-generation “Mini” UAV models are approaching or exceeding these thresholds—indicating the need to update current regulatory approaches.
The results suggest that mass-based classification systems alone (such as the 250 g threshold) may no longer be sufficient to ensure public safety in the face of increasing technical diversity and speed capabilities. Therefore, we recommend that regulators adopt energy-based classification systems to complement mass-based limits. For example, introducing a new class based on energy levels below 25 J would allow for more accurate management of the real injury potential of high-performance lightweight UAVs. This approach would support technological progress while maintaining robust safety standards.
Furthermore, given the dynamic nature of the UAV market, regulatory frameworks should move toward dynamic threshold systems. In this regard, mission-based permissions (e.g., allowing higher-energy UAVs to fly only in low-risk areas) and scenario-specific regulatory models (e.g., applying different regulations for delivery drones and recreational UAVs) should be developed. Such a framework would establish a flexible and innovative regulatory infrastructure.
Additionally, this study identified the lack of large-scale empirical testing under controlled conditions as a key gap. While current theoretical models (such as BC and VC) are valuable, they must be supported by realistic UAV designs and human body simulations. Therefore, conducting comprehensive crash test campaigns and developing real-time injury risk monitoring systems should be prioritized as future research areas.
In conclusion, while the 250 g mass threshold remains a practical and largely valid “harmless” limit for now, this threshold must soon evolve into a new regulatory framework that incorporates energy awareness. The combination of kinetic energy, BC, VC, and AIS metrics provides a scientifically sound foundation for this transformation. To maintain public confidence and support the sustainable integration of UAV technology, collaboration among regulators, manufacturers, and researchers is essential, with a focus on developing evidence-based dynamic safety systems.
In addition, it is essential that regulatory authorities adopt a dynamic and adaptive approach to UAV safety regulations. Rather than relying solely on static mass thresholds, regulators should be prepared to revise or lower these limits if emerging data and technological developments suggest higher levels of injury risk—even for sub-250 g UAVs. Even if the thresholds themselves remain unchanged, the integration of recognized frameworks such as the Specific Operations Risk Assessment (SORA), developed by JARUS, can significantly enhance operational safety by accounting for contextual and mission-specific factors. These adaptive measures will be crucial in ensuring that regulatory systems remain responsive to evolving UAV capabilities and real-world risk environments.
The findings of the study underscore the importance of transitioning from weight-centric regulatory approaches toward more comprehensive, risk-based frameworks. As detailed in the risk classification analysis (Section 6), even sub-250 g UAVs can generate significant kinetic energy and injury potential, challenging the traditional assumption that lighter drones are inherently safer. By incorporating metrics such as KE and AIS scores, this human-centered evaluation provides a scientifically grounded basis for assessing UAV risks. The proposed classification scheme enables more effective policy development, encouraging technological safeguards and operational protocols that better protect public safety in the evolving airspace ecosystem.
As part of future work, experimental testing is planned to validate the theoretical injury predictions presented in the study. Specifically, the study aims to replicate sub-250 g UAV collision scenarios using anthropomorphic test devices or synthetic human surrogates to evaluate the extent to which kinetic energy, Blunt Criterion (BC), and Viscous Criterion (VC) align with observed injury outcomes. This empirical approach will help refine the current model assumptions—such as full energy transfer and rigid body impacts—and offer a more realistic understanding of human injury risk in UAV-related incidents. The results of such testing are expected to enhance the practical applicability of the framework and provide valuable insights for regulators, drone manufacturers, and public safety agencies.
Future research should prioritize large-scale empirical testing using realistic human body analogs to validate injury predictions and expand the analysis beyond thoracic injuries to include regions such as the head and extremities. In addition, the development of real-time injury risk monitoring systems and adaptive regulatory frameworks will be essential for ensuring safe and comprehensive integration of lightweight UAVs into public airspace.
Funding
This research received no external funding.
Data Availability Statement
The dataset used in this study is provided in Appendix A.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
| AGL | Above Ground Level |
| AIS | Abbreviated Injury Scale |
| ARC | Aviation Rulemaking Committee |
| AUVSI | Association for Unmanned Vehicle Systems International |
| A–NPA | Advance Notice of Proposed Amendment |
| BC | Blunt Criterion |
| BVLOS | Beyond Visual Line of Sight |
| CAGR | Compound Annual Growth Rate |
| CS | Certification Specifications |
| EASA | European Union Aviation Safety Agency |
| ELOS | Equivalent Level of Safety |
| FAA | Federal Aviation Administration |
| FMRA | FAA Modernization and Reform Act |
| HALE | High Altitude Long Endurance |
| HAP | High Altitude Platform |
| ID | Electronic İdentity |
| JARUS | Joint Authorities for Rulemaking on Unmanned Systems |
| LAP | Low Altitude Platform |
| LTA | Lighter Than Air |
| MALE | Medium-altitude long-endurance |
| MAV | Micro Air Vehicles |
| MTOW | Maximum Take-Off Weight |
| NAS | National Airspace System |
| NPRM | Notice of Proposed Rulemaking |
| PIC | Pilot in Command |
| SORA | Specific Operations Risk Assessment (SORA) |
| TGI | Time between ground impacts |
| UAS | Unmanned Aircraft Systems |
| UAV | Unmanned Aerial Vehicle |
| USA | United States of America |
| VC | Viscous Criterion |
| VLOS | Visual Line of Sight |
Appendix A
| Name | Mass (g) | Speed (m/s) | KE (J) | VC | BC | AIS | |
| 1 | Parrot Bebop 2 | 500 | 15 | 56.25 | 1.69 | 5.62 | 8.08 |
| 2 | X25S Shuttle FPV Racing | 198 | 14 | 19.40 | 0.58 | 4.56 | 6.66 |
| 3 | Parrot AR.Drone 2.0 | 380 | 13 | 32.11 | 0.96 | 5.06 | 7.33 |
| 4 | Lynxmotion Hunter 500 | 365 | 13 | 30.84 | 0.93 | 5.02 | 7.28 |
| 5 | Parrot AR.Drone 2.0 | 420 | 12 | 30.24 | 0.91 | 5.00 | 7.25 |
| 6 | Hubsan FPV Spy Hawk | 180 | 12 | 12.96 | 0.39 | 4.15 | 6.12 |
| 7 | Mini 4 Pro | 249 | 12 | 17.93 | 0.54 | 4.48 | 6.55 |
| 8 | Flip | 249 | 12 | 17.93 | 0.54 | 4.48 | 6.55 |
| 9 | Pantonma | 135 | 11 | 8.17 | 0.25 | 3.69 | 5.51 |
| 10 | Mini 2 | 242 | 10 | 12.10 | 0.36 | 4.08 | 6.03 |
| 11 | Mini 3 | 248 | 10 | 12.40 | 0.37 | 4.11 | 6.06 |
| 12 | Mini 3 Pro | 249 | 10 | 12.45 | 0.37 | 4.11 | 6.07 |
| 13 | EVO Nano | 249 | 10 | 12.45 | 0.37 | 4.11 | 6.07 |
| 14 | ATOM | 249 | 10 | 12.45 | 0.37 | 4.11 | 6.07 |
| 15 | ATOM LT | 249 | 10 | 12.45 | 0.37 | 4.11 | 6.07 |
| 16 | ATOM SE | 249 | 10 | 12.45 | 0.37 | 4.11 | 6.07 |
| 17 | ATOM 2 | 249 | 10 | 12.45 | 0.37 | 4.11 | 6.07 |
| 18 | Wipkviey T28 | 122 | 10 | 6.10 | 0.18 | 3.40 | 5.12 |
| 19 | Wipkviey B12 | 185 | 10 | 9.25 | 0.28 | 3.82 | 5.67 |
| 20 | Wipkviey T25 | 200 | 10 | 10.00 | 0.30 | 3.89 | 5.78 |
| 21 | Wipkviey T26 | 138 | 10 | 6.90 | 0.21 | 3.52 | 5.28 |
| 22 | Wipkviey TY-B15 | 155 | 10 | 7.75 | 0.23 | 3.64 | 5.44 |
| 23 | Wipkviey TY-T18 | 69 | 10 | 3.45 | 0.10 | 2.83 | 4.36 |
| 24 | Wipkviey TY-T6 | 470 | 10 | 23.50 | 0.71 | 4.75 | 6.91 |
| 25 | CX-33W WiFi FPV | 133 | 9 | 5.39 | 0.16 | 3.27 | 4.95 |
| 26 | Raider XL | 100 | 9 | 4.05 | 0.12 | 2.99 | 4.58 |
| 27 | E-Flite UMX Pitts S-1S | 90 | 9 | 3.65 | 0.11 | 2.88 | 4.44 |
| 28 | E-Flite UMX Habu 180 | 76 | 9 | 3.08 | 0.09 | 2.71 | 4.21 |
| 29 | Syma DRO | 100 | 8 | 3.20 | 0.10 | 2.75 | 4.26 |
| 30 | Parrot Mambo | 65 | 8 | 2.08 | 0.06 | 2.32 | 3.69 |
| 31 | Mini 1 | 249 | 8 | 7.97 | 0.24 | 3.67 | 5.48 |
| 32 | Mavic Air 1 | 430 | 8 | 13.76 | 0.41 | 4.21 | 6.20 |
| 33 | Avata | 410 | 8 | 13.12 | 0.39 | 4.16 | 6.14 |
| 34 | E-Flite Blade CX 2 | 227 | 7 | 5.56 | 0.17 | 3.31 | 5.00 |
| 35 | Latrax Alias Q | 100 | 7 | 2.45 | 0.07 | 2.49 | 3.91 |
| 36 | E-Flite UMX Beast 3D | 72 | 7 | 1.76 | 0.05 | 2.16 | 3.47 |
| 37 | E-Flite UMX Carbon Cub | 90 | 6 | 1.62 | 0.05 | 2.07 | 3.36 |
| 38 | FPV Drone F807 | 40 | 6 | 072 | 0.02 | 1.26 | 2.28 |
| 39 | Neo | 135 | 6 | 2.43 | 0.07 | 2.48 | 3.90 |
| 40 | iPhone Flying Bomber | 106 | 5 | 1.33 | 0.04 | 1.87 | 3.09 |
| 41 | BLADE 180 QX HD RTF | 95 | 5 | 1.19 | 0.04 | 1.76 | 2.94 |
| 42 | Parrot Swing | 75 | 5 | 0.94 | 0.03 | 1.53 | 2.63 |
| 43 | Hubsan FPV X4 Plus | 68 | 5 | 0.85 | 0.03 | 1.43 | 2.50 |
| 44 | Hubsan X4 Cam Plus | 50 | 5 | 063 | 0.02 | 1.12 | 2.09 |
| 45 | Silverlit Space Nova | 80 | 4 | 0.64 | 0.02 | 1.14 | 2.12 |
| 46 | Hobby Zone Duet RTF | 38 | 4 | 0.30 | 0.01 | 0.40 | 1.13 |
| 47 | Drone ST4 | 35 | 4 | 0.28 | 0.01 | 0.32 | 1.02 |
| 48 | Hubsan X4 Pus | 32 | 4 | 0.26 | 0.01 | 0.23 | 0.90 |
| 49 | Hubsan X4 H108 | 31 | 4 | 0.25 | 0.01 | 0.20 | 0.86 |
| 50 | Dexterity X100 | 29 | 4 | 0.23 | 0.01 | 0.13 | 0.77 |
| 51 | FPV Drone Hawkeye | 16 | 4 | 0.13 | 0.00 | −0.47 | −0.02 |
| 52 | Traxxas QR-1 | 33 | 3 | 0.15 | 0.00 | −0.32 | 0.18 |
| 53 | Hubsan X4 Spider | 25 | 3 | 0.11 | 0.00 | −0.59 | −0.19 |
| 54 | Nano Quad CX-10D | 16 | 3 | 0.07 | 0.00 | −1.04 | −0.78 |
| 55 | Hubsan X4 | 15 | 3 | 0.07 | 0.00 | −1.11 | −0.87 |
| 56 | Nano Quad CX-10C | 14 | 3 | 0.06 | 0.00 | −1.17 | −0.96 |
| 57 | E-Flite Blade MCX Micro | 28 | 2 | 0.06 | 0.00 | −1.29 | −1.12 |
| 58 | Crazyflie Nano | 19 | 2 | 0.04 | 0.00 | −1.68 | −1.63 |
| 59 | Blade Nano QX RTF | 17 | 2 | 0.03 | 0.00 | −1.79 | −1.78 |
| 60 | Nano Quad CX-10A | 15 | 2 | 0.03 | 0.00 | −1.92 | −1.95 |
| 61 | Estes Proto X Nano | 12 | 2 | 0.02 | 0.00 | −2.14 | −2.25 |
| 62 | Proto X Nano-Sized | 11 | 2 | 0.02 | 0.00 | −2.23 | −2.36 |
References
- Mohsan, S.A.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef] [PubMed]
- Mirza, M.N.; Qaisrani, I.H.; Ali, L.A.; Ali Naqvi, A. Unmanned Aerial Vehicles: A Revolution in the Making. South Asia Stud. 2016, 31, 243–256. [Google Scholar]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Gargalakos, M. The role of unmanned aerial vehicles in military communications: Application scenarios, current trends, and beyond. J. Def. Model. Simul. Appl. Methodol. Technol. 2024, 21, 313–321. [Google Scholar] [CrossRef]
- Kanat, Ö.Ö. The significance of unmanned aerial vehicles (UAVs) in strategic contexts. Anadolu Strat. Derg. 2023, 5, 75–87. [Google Scholar]
- Skiba, R.; Warfare, U. Evolution, Strategies and Mastery of the Modern Conflict Landscape; After Midnight Publishing: London, UK, 2024. [Google Scholar]
- DeGarmo, M.T. Issues concerning integration of unmanned aerial vehicles in civil airspace. Cent. Adv. Aviat. Syst. Dev. 2004, 4, 1–98. [Google Scholar]
- Savas, T.; Usanmaz, O.; Sahin, O.; Çınar, E.; Karaderili, M. Integration effects of UAVs in non-segregated airspace. Aircr. Eng. Aerosp. Technol. 2021, 93, 842–846. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A comprehensive review of recent research trends on unmanned aerial vehicles (uavs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef]
- Ahmed, F.; Mohanta, J.C.; Keshari, A.; Yadav, P.S. Recent Advances in Unmanned Aerial Vehicles: A Review. Arab. J. Sci. Eng. 2022, 47, 7963–7984. [Google Scholar] [CrossRef] [PubMed]
- Koslowski, R.; Schulzke, M. Drones along borders: Border security UAVs in the United States and the European Union. Int. Stud. Perspect. 2018, 19, 305–324. [Google Scholar] [CrossRef]
- Kabir, R.H.; Lee, K. Wildlife monitoring using a multi-uav system with optimal transport theory. Appl. Sci. 2021, 11, 4070. [Google Scholar] [CrossRef]
- Hlotov, V.; Hunina, A.; Kniaziev, S.; Kolesnichenko, V.; Prokhorchuk, O. Analysis of application of the UAVs for military tasks. Сучасні Дoсягнення Геoдезичнoї Науки Та Вирoбництва 2019, 37, 69–77. [Google Scholar] [CrossRef]
- Sziroczak, D.; Rohacs, D.; Rohacs, J. Review of using small UAV based meteorological measurements for road weather management. Prog. Aerosp. Sci. 2022, 134, 100859. [Google Scholar] [CrossRef]
- Wongkrasun, K.; Rakpuangchon, V. Law Enforcement Aviation and Unmanned Aircraft. Ph.D. Thesis, Sukhothai Thammathirat Open University, Nonthaburi, Thailand, 2025. Available online: http://ir.stou.ac.th/handle/123456789/13440 (accessed on 10 June 2025).
- Shuaibu, A.S.; Mahmoud, A.S.; Sheltami, T.R. A review of last-mile delivery optimization: Strategies, technologies, drone integration, and future trends. Drones 2025, 9, 158. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Lee, D.; Hess, D.J.; Heldeweg, M.A. Safety and privacy regulations for unmanned aerial vehicles: A multiple comparative analysis. Technol. Soc. 2022, 71, 102079. [Google Scholar] [CrossRef]
- Kurunathan, H.; Huang, H.; Li, K.; Ni, W.; Hossain, E. Machine learning-aided operations and communications of unmanned aerial vehicles: A contemporary survey. IEEE Commun. Surv. Tutor. 2023, 26, 496–533. [Google Scholar] [CrossRef]
- Commercial Drone Market Size, Share|Industry Report. 2030. Available online: https://www.grandviewresearch.com/industry-analysis/global-commercial-drones-market (accessed on 22 May 2025).
- PricewaterhouseCoopers Global Market for Commercial Applications of Drone Technology Valued at over $127 bn. PwC. Available online: https://www.pwc.pl/en/media/2016/2016-05-09-global-market-for-commercial-applications-of-drone-technology.html (accessed on 22 May 2025).
- Ren, L.; Castillo-Effen, M.; Yu, H.; Johnson, E.; Yoon, Y.; Nakamura, T.; Ippolito, C.A. Small unmanned aircraft system (sUAS) categorization framework for low altitude traffic services. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–10. Available online: https://ieeexplore.ieee.org/abstract/document/8101996/ (accessed on 10 June 2025).
- La Cour-Harbo, A. Mass threshold for ‘harmless’ drones. Int. J. Micro Air Veh. 2017, 9, 77–92. [Google Scholar] [CrossRef]
- Tachinina, O.; Lysenko, A.; Kutiepov, V. Classification of modern unmanned aerial vehicles. Electron. Control Syst. 2022, 4, 79–86. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer Publishing Company, Inc.: New York, NY, USA, 2014. [Google Scholar]
- Ps, R.; Jeyan, M.L. Mini Unmanned Aerial Systems (UAV)—A Review of the Parameters for Classification of a Mini UAV. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 5. [Google Scholar] [CrossRef]
- Haddon, D.R.; Whittaker, C.J. Aircraft airworthiness certification standards for civil UAVs. Aeronaut. J. 2003, 107, 79–86. [Google Scholar] [CrossRef]
- Weibel, R.; Hansman, R.J. Safety Considerations for Operation of Different Classes of UAVs in the NAS. In Proceedings of the AIAA 4th Aviation Technology, Integration and Operations (ATIO) Forum, Chicago, IL, USA, 20–22 September 2004; American Institute of Aeronautics and Astronautics: Chicago, IL, USA, 2004. [Google Scholar] [CrossRef]
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. (Eds.) Thoughts and Recommendations on a UAS Integration Roadmap. In On Integrating Unmanned Aircraft Systems into the National Airspace System; Springer: Dordrecht, The Netherlands, 2009; Volume 36, pp. 109–130. [Google Scholar] [CrossRef]
- AC 23.1309-1E—System Safety Analysis and Assessment for Part 23 Airplanes. Available online: https://www.faa.gov/regulations_policies/advisory_circulars/index.cfm/go/document.information/documentID/1019681 (accessed on 12 June 2025).
- Cai, G.; Dias, J.; Seneviratne, L. A Survey of Small-Scale Unmanned Aerial Vehicles: Recent Advances and Future Development Trends. Unmanned Syst. 2014, 2, 175–199. [Google Scholar] [CrossRef]
- Arjomandi, M.; Agostino, S.; Mammone, M.; Nelson, M.; Zhou, T. Classification of unmanned aerial vehicles. Rep. Mech. Eng. Cl. Univ. Adel. Adel. Aust. 2006, 1–48. [Google Scholar]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An overview of small unmanned aerial vehicles for air quality measurements: Present applications and future prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed]
- Govorčin, M.; Geoinf, G.E.; Pribičević, B.; Đapo, A. Comparison and analysis of software solutions for creation of a digital terrain model using unmanned aerial vehicles. In Proceedings of the 14th International Multidisciplinary Scientific Geo Conference SGEM 2014, Albena, Bulgaria, 17–26 June 2014; pp. 99–108. Available online: https://elibrary.ru/item.asp?id=43151823&pf=1 (accessed on 22 May 2025).
- Gupta, S.G.; Ghonge, D.M.; Jawandhiya, P.M. Review of unmanned aircraft system (UAS). Int. J. Adv. Res. Comput. Eng. Technol. IJARCET 2013, 2, 1646–1658. [Google Scholar] [CrossRef]
- Hartanto, R.; Arkeman, Y.; Hermadi, I.; Sjaf, S.; Kleinke, M. Intelligent unmanned aerial vehicle for agriculture and agroindustry. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019; p. 012001. Available online: https://iopscience.iop.org/article/10.1088/1755-1315/335/1/012001/meta (accessed on 22 May 2025).
- Wang, L.; Zhou, W.; Zhao, S. Application of mini-UAV in emergency rescue of major accidents of hazardous chemicals. In Proceedings of the 2013 the International Conference on Remote Sensing, Environment and Transportation Engineering (RSETE 2013), Nanjing, China, 26–28 July 2013; Atlantis Press: Nanjing, China, 2013; pp. 151–154. Available online: https://www.atlantis-press.com/proceedings/rsete-13/8153 (accessed on 22 May 2025).
- Weed, S.C. The Quality of Quantity—Mini-UAVS As An Alternative UAV Acquisition Strategy at the Army Brigade Level. DTIC Doc. 2002. [Google Scholar]
- Hsu, K.; Murray, C.; Cook, J.; Feld, A. China’s Military Unmanned Aerial Vehicle Industry; US-China Economic and Security Review Commission: Washington, DC, USA, 2013. Available online: https://www.uscc.gov/sites/default/files/Research/China%27s%20Military%20UAV%20Industry_14%20June%202013.pdf (accessed on 22 May 2025).
- Lee, S.; Tjahjowidodo, T.; Moon, S.K. Flexible membrane wing warping using tendon-sheath mechanism. In Proceedings of the 2015 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015; pp. 624–629. Available online: https://ieeexplore.ieee.org/abstract/document/7158816/ (accessed on 22 May 2025).
- Brooke-Holland, L. Overview of military drones used by the UK armed forces. House Commons Libr. 2015, 1–54. [Google Scholar]
- Rawat, K.; Lawrence, E. A mini-UAV VTOL platform for surveying applications. IAES Int. J. Robot. Autom. 2014, 3, 259. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Aswini, N.; Kumar, E.K.; Uma, S.V. UAV and obstacle sensing techniques–a perspective. Int. J. Intell. Unmanned Syst. 2018, 6, 32–46. [Google Scholar] [CrossRef]
- Boutemedjet, A.; Samardžić, M.; Rebhi, L.; Rajić, Z.; Mouada, T. UAV aerodynamic design involving genetic algorithm and artificial neural network for wing preliminary computation. Aerosp. Sci. Technol. 2019, 84, 464–483. [Google Scholar] [CrossRef]
- Lykou, G.; Moustakas, D.; Gritzalis, D. Defending airports from UAS: A survey on cyber-attacks and counter-drone sensing technologies. Sensors 2020, 20, 3537. [Google Scholar] [CrossRef] [PubMed]
- Sokal, R.R. Classification: Purposes, Principles, Progress, Prospects: Clustering and other new techniques have changed classificatory principles and practice in many sciences. Science 1974, 185, 1115–1123. [Google Scholar] [CrossRef] [PubMed]
- Maddalon, J.M.; Hayhurst, K.J.; Koppen, D.M.; Upchurch, J.M.; Morris, A.T.; Verstynen, H.A. Perspectives on Unmanned Aircraft Classification for Civil Airworthiness Standards. 2013. Available online: https://ntrs.nasa.gov/citations/20130010930 (accessed on 22 May 2025).
- Nas, M. Classifying Unmanned Aircraft Systems: Developing a Legal Framework for the Purposes of Airworthiness Certification. Ph.D. Thesis, Murdoch University, Murdoch, Australia, 2015. Available online: https://researchportal.murdoch.edu.au/esploro/outputs/graduate/Classifying-unmanned-aircraft-systems-Developing-a/991005542121507891 (accessed on 22 May 2025).
- Clothier, R.; Palmer, J.; Walker, R.; Fulton, N. Definition of airworthiness categories for civil Unmanned Aircraft Systems (UAS). In Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences, Nice, France, 19–24 September 2010; pp. 1–12. Available online: https://eprints.qut.edu.au/32789/ (accessed on 22 May 2025).
- Brennan, T. Classification: An Overview of Selected Methodological Issues. Crime Justice 1987, 9, 201–248. [Google Scholar] [CrossRef]
- Maneschijn, A.; Jones, T.; von Backström, T.W.; Ingham, L.A. A proposed reference framework for unmanned aerial vehicle and system airworthiness requirements. Aeronaut. J. 2007, 111, 345–358. [Google Scholar] [CrossRef]
- Clothier, R.A.; Palmer, J.L.; Walker, R.A.; Fulton, N.L. Definition of an airworthiness certification framework for civil unmanned aircraft systems. Saf. Sci. 2011, 49, 871–885. [Google Scholar] [CrossRef]
- Clothier, R.; Walker, R. Determination and evaluation of UAV safety objectives. In Proceedings of the 21st International Conference on Unmanned Air Vehicle Systems, Athens, Greece, 17–21 February 2025; pp. 18–21. Available online: https://eprints.qut.edu.au/4183/ (accessed on 22 May 2025).
- Plucken, M.A. The Regulatory Approach of ICAO, the United States and Canada to Civil Unmanned Aircraft Systems, in Particular to Certification and Licensing; McGill University: Montréal, QC, Canada, 2012; Available online: https://search.proquest.com/openview/fa8632d7ab408c022e421473a6f0e347/1?pq-origsite=gscholar&cbl=18750 (accessed on 22 May 2025).
- FAA Modernization and Reform Act of 2012. Available online: https://www.congress.gov/bill/112th-congress/house-bill/658/text (accessed on 26 May 2025).
- Unmanned Aircraft Systems (UAS)|Federal Aviation Administration. Available online: https://www.faa.gov/uas (accessed on 26 May 2025).
- Advisory and Rulemaking Committees—Small Unmanned Aircraft Systems (sUAS) ARC Complete File. Available online: https://www.faa.gov/regulations_policies/rulemaking/committees/documents/index.cfm/document/information?documentID=300 (accessed on 26 May 2025).
- Dourado, E.; Hagemann, R.; Thierer, A. Operation and Certification of Small Unmanned Aircraft Systems; Public Interest Comment; Mercatus Center at George Mason University: Arlington, VA, USA, 2015; Available online: https://www.mercatus.org/system/files/Dourado-UAS-PIC.pdf (accessed on 11 November 2024).
- Morris, R.; Thurston, G. Registration and Marking Requirements for Small Unmanned Aircraft. Technical Report RIN 2120-AK82; Federal Aviation Administration: Washington, DC, USA, 2015. [Google Scholar]
- OOP_Final Rule|Federal Aviation Administration. Available online: https://www.faa.gov/newsroom/oopfinal-rule (accessed on 26 May 2025).
- EASA; NPA. 2022-06—Introduction of a Regulatory Framework for the Operation of Drones. Available online: https://www.easa.europa.eu/en/document-library/notices-of-proposed-amendment/npa-2022-06 (accessed on 10 May 2024).
- Easy Access Rules for Unmanned Aircraft Systemsccessed. Available online: https://www.easa.europa.eu/en/document-library/easy-access-rules/easy-access-rules-unmanned-aircraft-systems-regulations-eu (accessed on 10 June 2025).
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. Current Status and Future Perspectives for Unmanned Aircraft System Operations in the US. J. Intell. Robot. Syst. 2008, 52, 313–329. [Google Scholar] [CrossRef]
- Fraser, C.S.R.; Donnithorne-Tait, D. An approach to the classification of unmanned aircraft. In Proceedings of the 26th International Conference on Unmanned Aerial Vehicle Systems (UAVS), Bristol, UK, 11–12 April 2011; pp. 157–211. [Google Scholar]
- Arterburn, D.R.; Duling, C.T.; Goli, N.R. Ground Collision Severity Standards for UAS Operating in the National Airspace System (NAS). In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, Colorado, 5–9 June 2017; American Institute of Aeronautics and Astronautics: Denver, Colorado, 2017. [Google Scholar] [CrossRef]
- Burke, D.A. System Level Airworthiness Tool: A Comprehensive Approach to Small Unmanned Aircraft System Airworthiness; North Carolina State University: Raleigh, NC, USA, 2010; Available online: https://search.proquest.com/openview/f04ec4c66f01d218645b8113060f70aa/1?pq-origsite=gscholar&cbl=18750 (accessed on 11 June 2025).
- Clare, V.R.; Sturdivan, L.M.; Mickiewicz, A.P.; Lewis, J.H. Blunt Trauma Data Correlation. 1975. Available online: https://apps.dtic.mil/sti/pdfs/ADA012761.pdf (accessed on 20 May 2025).
- Sturdivan, L.M.; Viano, D.C.; Champion, H.R. Analysis of injury criteria to assess chest and abdominal injury risks in blunt and ballistic impacts. J. Trauma Acute Care Surg. 2004, 56, 651–663. [Google Scholar] [CrossRef] [PubMed]
- Authority, C.A.S. Human Injury Model for Small Unmanned Aircraft Impacts; Monash University: Melbourne, Australia, 2013; Available online: https://suasnews.com/wp-content/uploads/2016/04/CASA-Publication-1-human-injury-model-small-unmanned-aircraft-impacts.pdf (accessed on 11 June 2025).
- Raymond, D.; Van Ee, C.; Crawford, G.; Bir, C. Tolerance of the skull to blunt ballistic temporo-parietal impact. J. Biomech. 2009, 42, 2479–2485. [Google Scholar] [CrossRef] [PubMed]
- Magister, T. The small unmanned aircraft blunt criterion based injury potential estimation. Saf. Sci. 2010, 48, 1313–1320. [Google Scholar] [CrossRef]
- Bir, C.; Viano, D.C. Design and injury assessment criteria for blunt ballistic impacts. J. Trauma Acute Care Surg. 2004, 57, 1218–1224. [Google Scholar] [CrossRef] [PubMed]
- Henderson, J. Lethality Criteria for Debris Generated from Accidental Explosions; Minist. Def Lond: London, UK, 2010; Available online: https://apps.dtic.mil/sti/citations/ADA532158 (accessed on 20 May 2025).
- Longinow, A.; Wiedermann, A.; Citko, S.; Iwankiw, N. Debris Motion and Injury Relationships in All Hazard Environments. Technical Report; Defence Civil Preparedness Agency: Washington, DC, USA, 1976; Available online: https://apps.dtic.mil/sti/tr/pdf/ADA030815.pdf (accessed on 20 May 2025).
- Widder, J.; Butz, D.; Milosh, J. Assessing the Blunt Trauma Potential of Free Flying Projectiles for Development and Safety Certification of Non-Lethal Kinetic Energy Impactors. In Proceedings of the NLD III Conference, Amsterdam, The Netherlands, 27–28 May 1998; p. 26. Available online: http://www.gbppr.net/mil/mindcontrol/widder.pdf (accessed on 11 June 2025).
- Beklemysheva, K.A.; Danilov, A.A.; Petrov, I.B.; Salamatova, V.Y.; Vassilevski, Y.V.; Vasyukov, A.V. Virtual blunt injury of human thorax: Age-dependent response of vascular system. Russ. J. Numer. Anal. Math. Model. 2015, 30, 259–268. [Google Scholar] [CrossRef]
- Biomechanics of Chest and Abdomen Impact. In Biomedical Engineering Fundamentals; CRC Press: Boca Raton, FL, USA, 2006.
- Viano, D.C.; Lau, I.V. A viscous tolerance criterion for soft tissue injury assessment. J. Biomech. 1988, 21, 387–399. [Google Scholar] [CrossRef] [PubMed]
- Abbreviated Injury Scale (AIS) 2005 Manual. Technical Report, Association for the Advancement of Automotive Medicine. Available online: https://www.aaam.org/abbreviated-injury-scale-ais/ (accessed on 11 June 2025).
- Gennarelli, T.A.; Wodzin, E. AIS 2005: A contemporary injury scale. Injury 2006, 37, 1083–1091. [Google Scholar] [CrossRef] [PubMed]
- Rapsang, A.G.; Shyam, D.C. Scoring systems of severity in patients with multiple trauma. Cirugía Española (Engl. Ed.) 2015, 93, 213–221. [Google Scholar] [CrossRef] [PubMed]
- Range Safety Group. Common Rısk Crıterıa Standards for Natıonal Test Ranges: Supplement. Available online: https://dtic.mil/sti/trecms/pdf/AD1214482.pdf (accessed on 11 June 2025).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).