

Surface Change and Stability Analysis in Open-Pit Mines Using UAV Photogrammetric Data and Geospatial Analysis


Abstract
1. Introduction
2. Materials and Methods
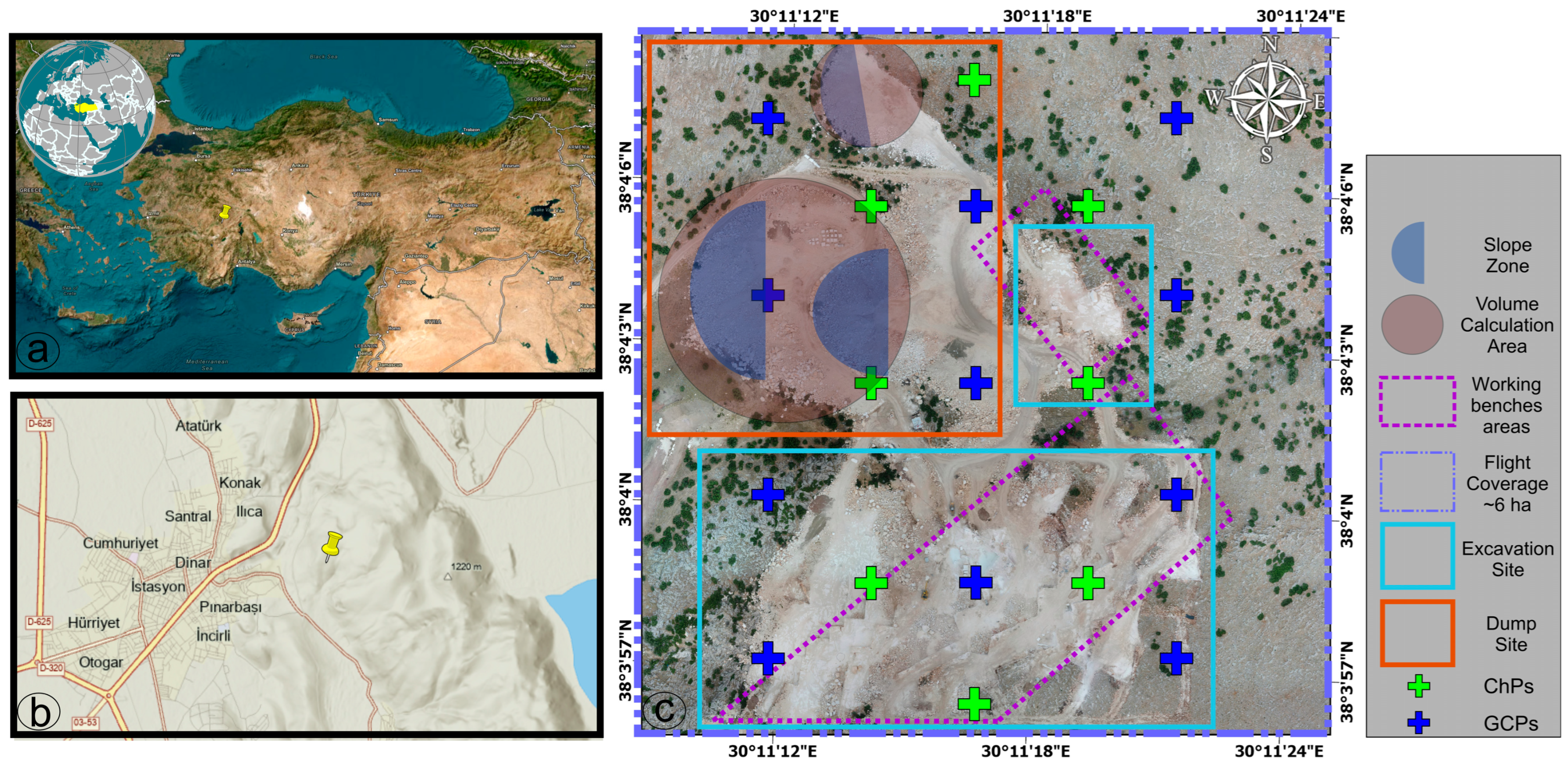
2.1. Study Area
2.2. Data Collection and UAV Photogrammetry
2.3. Accuracy Analysis and Workflow Overview
2.4. Change Detection and Metric Analysis
2.4.1. Change Detection
2.4.2. Volume Calculation and Surface Area (Dump, Excavation, Stable)
2.5. Risk Analysis
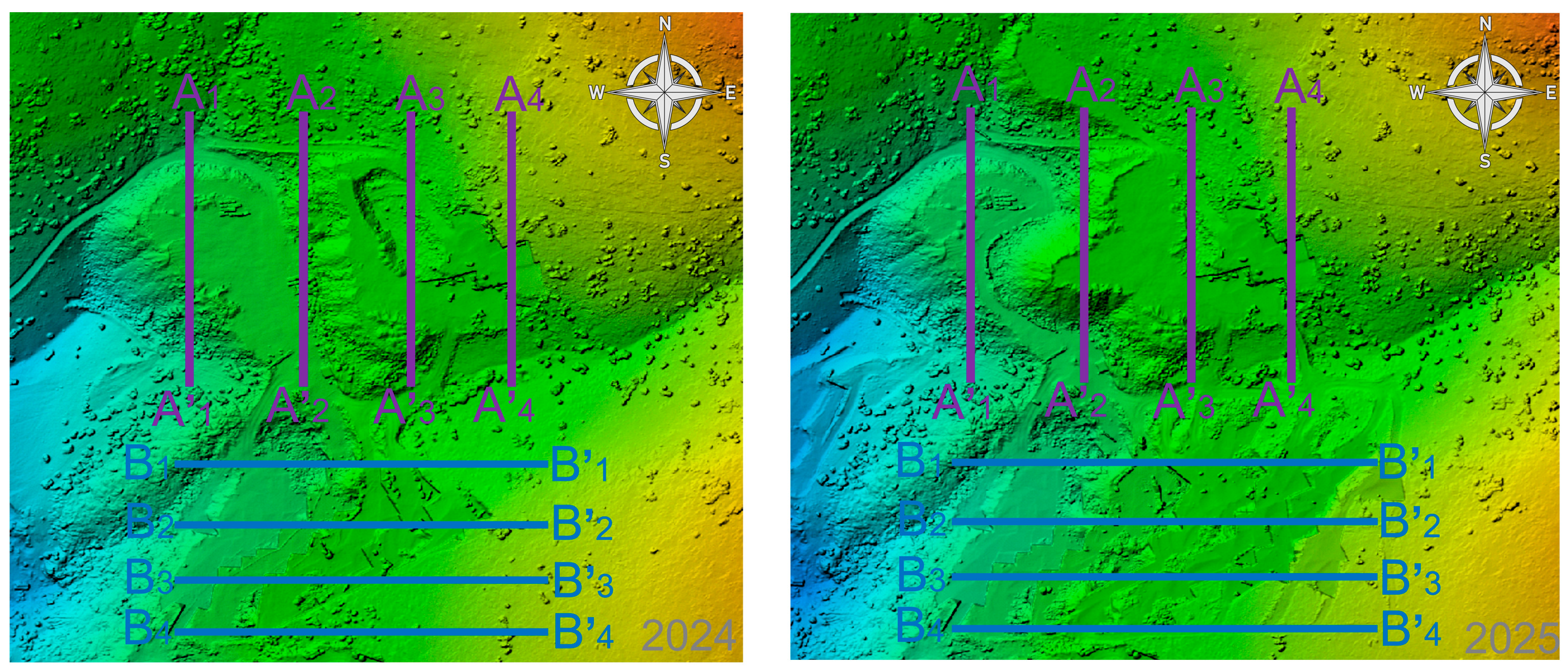
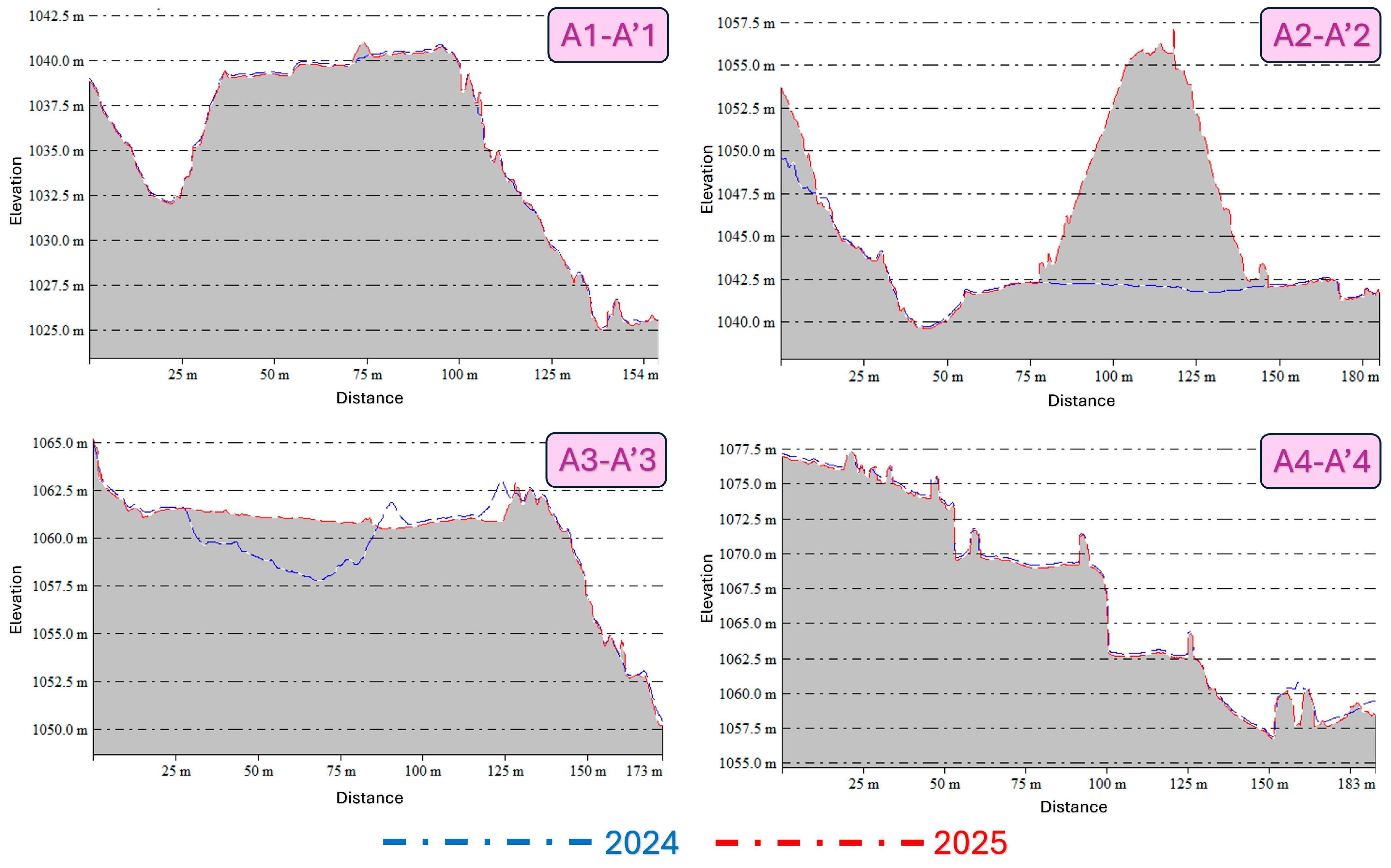
2.5.1. Surface Morphological Variation Analysis
2.5.2. Slope and Verticality Analysis
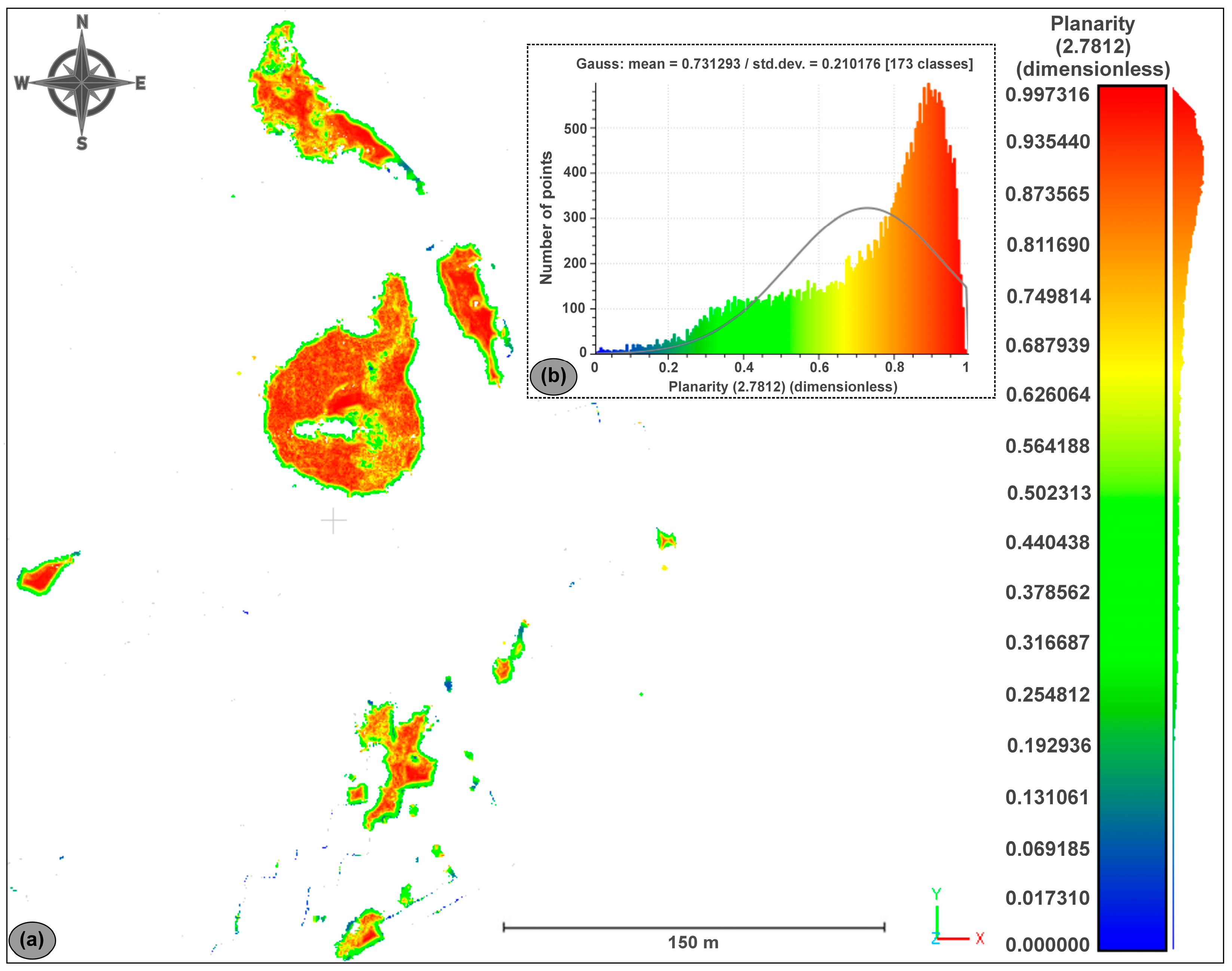
2.5.3. Planarity and Linearity-Based Risk Zone Classification
3. Results
3.1. Photogrammetric Data and Accuracy Analysis
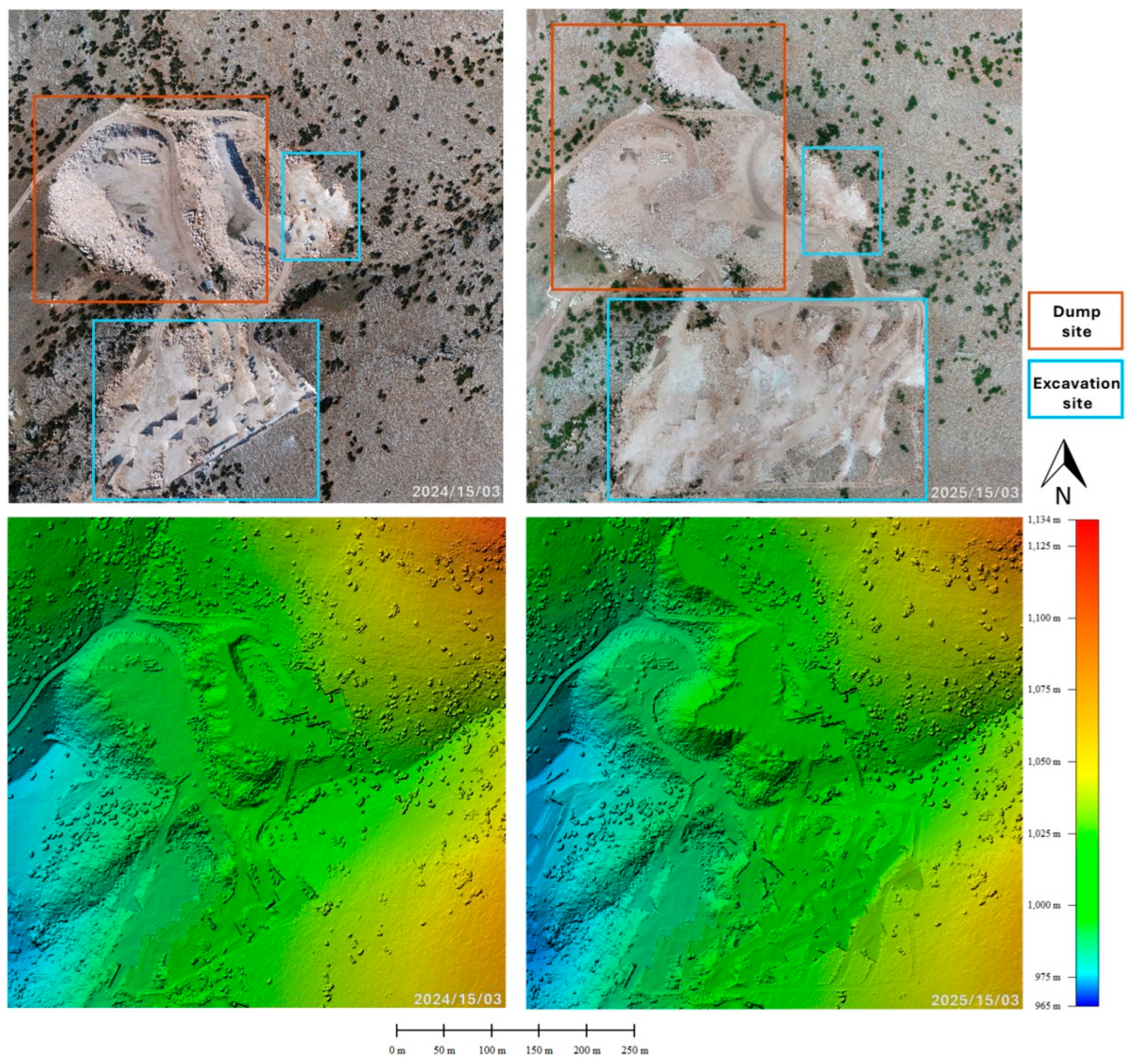
3.2. Change Detection, Volume and Surface Area Metric Analysis
3.3. Risk Analysis Results
4. Discussion, Limitations, and Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Badri, A.; Nadeau, S.; Gbodossou, A. Integration of OHS into Risk Management in an Open-Pit Mining Project in Quebec (Canada). Minerals 2011, 1, 3–29. [Google Scholar] [CrossRef]
- Khrais, S.K.; Yared, T.E.; Saifan, N.M.; Al-Hawari, T.H.; Dweiri, F. Occupational Safety Assessment for Surface Mine Systems: The Case in Jordan. Safety 2024, 10, 40. [Google Scholar] [CrossRef]
- Fabris, M.; Monego, M. A Drone-Based Structure from Motion Survey, Topographic Data, and Terrestrial Laser Scanning Acquisitions for the Floodgate Gaps Deformation Monitoring of the Modulo Sperimentale Elettromeccanico System (Venice, Italy). Drones 2024, 8, 598. [Google Scholar] [CrossRef]
- Liu, W.; Sheng, G.; Kang, X.; Yang, M.; Li, D.; Wu, S. Slope Stability Analysis of Open-Pit Mine Considering Weathering Effects. Appl. Sci. 2024, 14, 8449. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A Review of UAV Monitoring in Mining Areas: Current Status and Future Perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef]
- Oliveros-Sepúlveda, D.; Bascompta-Massanés, M.; Franco-Sepúlveda, G. Environmental and Closure Costs in Strategic Mine Planning, Models, Regulations, and Policies. Resources 2025, 14, 41. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Zapico, I.; Laronne, J.B.; Sánchez Castillo, L.; Martín Duque, J.F. Improvement of Workflow for Topographic Surveys in Long Highwalls of Open Pit Mines with an Unmanned Aerial Vehicle and Structure from Motion. Remote Sens. 2021, 13, 3353. [Google Scholar] [CrossRef]
- Leal-Alves, D.C.; Weschenfelder, J.; Albuquerque, M.D.G.; Espinoza, J.M.D.A.; Ferreira-Cravo, M.; Almeida, L.P.M.D. Digital elevation model generation using UAV-SfM photogrammetry techniques to map sea-level rise scenarios at Cassino Beach, Brazil. SN Appl. Sci. 2020, 2, 2181. [Google Scholar] [CrossRef]
- Battulwar, R.; Winkelmaier, G.; Valencia, J.; Naghadehi, M.Z.; Peik, B.; Abbasi, B.; Parvin, B.; Sattarvand, J. A Practical Methodology for Generating High-Resolution 3D Models of Open-Pit Slopes Using UAVs: Flight Path Planning and Optimization. Remote Sens. 2020, 12, 2283. [Google Scholar] [CrossRef]
- Qi, J.; Lin, E.S.; Tan, P.Y.; Zhang, X.; Ho, R.; Sia, A.; Waykool, R. Applying 3D Spatial Metrics for Landscape Planning: Creating and Measuring Landscape Scenarios by a Point Cloud-Based Approach. Ecol. Inform. 2024, 79, 102436. [Google Scholar] [CrossRef]
- Liu, B.; Liu, X.; Wan, H.; Ma, Y.; Lu, L. Long-Term Quantitative Analysis of the Temperature Vegetation Dryness Index to Assess Mining Impacts on Surface Soil Moisture: A Case Study of an Open-Pit Mine in Arid and Semiarid China. Appl. Sci. 2025, 15, 1850. [Google Scholar] [CrossRef]
- Zhang, L.; Zhai, Z.; Zhou, Y.; Liu, S.; Wang, L. The Landscape Pattern Evolution of Typical Open-Pit Coal Mines Based on Land Use in Inner Mongolia of China during 20 Years. Sustainability 2022, 14, 9590. [Google Scholar] [CrossRef]
- Krzyszowska Waitkus, A. Sustainable Reclamation Practices for a Large Surface Coal Mine in Shortgrass Prairie, Semiarid Environment (Wyoming, USA): Case Study. Int. J. Coal Sci. Technol. 2022, 9, 32. [Google Scholar] [CrossRef]
- Wang, S.; Bai, Z.; Lv, Y.; Zhou, W. Monitoring Extractive Activity-Induced Surface Subsidence in Highland and Alpine Opencast Coal Mining Areas with Multi-Source Data. Remote Sens. 2022, 14, 3442. [Google Scholar] [CrossRef]
- Kabadayı, A. Maden Sahasının İnsansız Hava Aracı Yardımıyla Fotogrametrik Yöntemle Haritalanması. Türkiye İn-sansız Hava Araçları Dergisi 2022, 4, 19–23. [Google Scholar] [CrossRef]
- Frid, M.; Frid, V. A Case Study of the Integration of Ground-Based and Drone-Based Ground-Penetrating Radar (GPR) for an Archaeological Survey in Hulata (Israel): Advancements, Challenges, and Applications. Appl. Sci. 2024, 14, 4280. [Google Scholar] [CrossRef]
- Almohsen, A.S. Challenges Facing the Use of Remote Sensing Technologies in the Construction Industry: A Review. Buildings 2024, 14, 2861. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Kalacska, M.; Arroyo-Mora, J.P.; Lucanus, O. Comparing UAS LiDAR and Structure-from-Motion Photogrammetry for Peatland Mapping and Virtual Reality (VR) Visualization. Drones 2021, 5, 36. [Google Scholar] [CrossRef]
- Bartlett, B.; Santos, M.; Dorian, T.; Moreno, M.; Trslic, P.; Dooly, G. Real-Time UAV Surveys with the Modular Detection and Targeting System: Balancing Wide-Area Coverage and High-Resolution Precision in Wildlife Monitoring. Remote Sens. 2025, 17, 879. [Google Scholar] [CrossRef]
- Li, Q.; Ma, Y.; Anderson, J.; Curry, J.; Shan, J. Towards Uniform Point Density: Evaluation of an Adaptive Terrestrial Laser Scanner. Remote Sens. 2019, 11, 880. [Google Scholar] [CrossRef]
- Abegg, M.; Kükenbrink, D.; Zell, J.; Schaepman, M.E.; Morsdorf, F. Terrestrial Laser Scanning for Forest Inventories—Tree Diameter Distribution and Scanner Location Impact on Occlusion. Forests 2017, 8, 184. [Google Scholar] [CrossRef]
- Ferreira, E.; Grilo, V.; Braun, J.; Santos, M.; Pereira, A.I.; Costa, P.; Lima, J. Development of a Low-Cost 3D Mapping Technology with 2D LIDAR for Path Planning Based on the A* Algorithm. In Iberian Robotics Conference; Springer Nature: Cham, Switzerland, 2023; pp. 53–66. [Google Scholar] [CrossRef]
- Shi, B.; Lin, W.; Ouyang, W.; Shen, C.; Sun, S.; Sun, Y.; Sun, L. BA-CLM: A Globally Consistent 3D LiDAR Mapping Based on Bundle Adjustment Cost Factors. Sensors 2024, 24, 5554. [Google Scholar] [CrossRef] [PubMed]
- Hamal, S.N.G.; Ulvi, A. Yersel Lazer Tarama ile Mimari Koruma ve Restorasyon Süreçlerinin Dijitalleştirilmesi. Türkiye Lidar Derg. 2024, 6, 66–73. [Google Scholar] [CrossRef]
- Chidi, C.L.; Zhao, W.; Chaudhary, S.; Xiong, D.; Wu, Y. Sensitivity Assessment of Spatial Resolution Difference in DEM for Soil Erosion Estimation Based on UAV Observations: An Experiment on Agriculture Terraces in the Middle Hill of Nepal. ISPRS Int. J. Geo Inf. 2021, 10, 28. [Google Scholar] [CrossRef]
- Delaney, B.; Tansey, K.; Whelan, M. Satellite Remote Sensing Techniques and Limitations for Identifying Bare Soil. Remote Sens. 2025, 17, 630. [Google Scholar] [CrossRef]
- Fabris, M.; Fontana Granotto, P.; Monego, M. Expeditious Low-Cost SfM Photogrammetry and a TLS Survey for the Structural Analysis of Illasi Castle (Italy). Drones 2023, 7, 101. [Google Scholar] [CrossRef]
- Haghjouei, H.; Kantoush, S.A.; Beiramipour, S.; Rahimpour, M.; Qaderi, K. Experimental Study Demonstrating a Cost-Effective Approach for Generating 3D-Enhanced Models of Sediment Flushing Cones Using Model-Based SFM Photogrammetry. Water 2022, 14, 1588. [Google Scholar] [CrossRef]
- Kasprzak, M.; Jancewicz, K.; Michniewicz, A. UAV and SfM in Detailed Geomorphological Mapping of Granite Tors: An Example of Starościńskie Skały (Sudetes, SW Poland). Pure Appl. Geophys. 2018, 175, 3193–3207. [Google Scholar] [CrossRef]
- Hilgendorf, Z.; Marvin, M.C.; Turner, C.M.; Walker, I.J. Assessing Geomorphic Change in Restored Coastal Dune Ecosystems Using a Multi-Platform Aerial Approach. Remote Sens. 2021, 13, 354. [Google Scholar] [CrossRef]
- Bi, R.; Gan, S.; Yuan, X.; Li, R.; Gao, S.; Yang, M.; Luo, W.; Hu, L. Multi-View Analysis of High-Resolution Geomorphic Features in Complex Mountains Based on UAV–LiDAR and SfM–MVS: A Case Study of the Northern Pit Rim Structure of the Mountains of Lufeng, China. Appl. Sci. 2023, 13, 738. [Google Scholar] [CrossRef]
- Villarreal, M.L.; Bishop, T.B.; Sankey, T.T.; Smith, W.K.; Burgess, M.A.; Caughlin, T.T.; Yao, E.H. Applications of Unoccupied Aerial Systems (UAS) in Landscape Ecology: A Review of Recent Research, Challenges and Emerging Opportunities. Landsc. Ecol. 2025, 40, 43. [Google Scholar] [CrossRef]
- Bartmiński, P.; Siłuch, M.; Kociuba, W. The Effectiveness of a UAV-Based LiDAR Survey to Develop Digital Terrain Models and Topographic Texture Analyses. Sensors 2023, 23, 6415. [Google Scholar] [CrossRef] [PubMed]
- Panara, Y.; Menegoni, N.; Finkbeiner, T.; Zühlke, R.; Vahrenkamp, V. High-Resolution Analysis of 3D Fracture Networks from Digital Outcrop Models, Correlation to Plate-Tectonic Events and Calibration of Subsurface Models (Jurassic, Arabian Plate). Mar. Pet. Geol. 2024, 167, 106998. [Google Scholar] [CrossRef]
- Hasegawa, H.; Sujaswara, A.A.; Kanemoto, T.; Tsubota, K. Possibilities of Using UAV for Estimating Earthwork Volumes during Process of Repairing a Small-Scale Forest Road, Case Study from Kyoto Prefecture, Japan. Forests 2023, 14, 677. [Google Scholar] [CrossRef]
- Kim, Y.H.; Shin, S.S.; Lee, H.K.; Park, E.S. Field Applicability of Earthwork Volume Calculations Using Unmanned Aerial Vehicle. Sustainability 2022, 14, 9331. [Google Scholar] [CrossRef]
- Trepekli, K.; Balstrøm, T.; Friborg, T.; Fog, B.; Allotey, A.N.; Kofie, R.Y.; Møller-Jensen, L. UAV-Borne, LiDAR-Based Elevation Modelling: A Method for Improving Local-Scale Urban Flood Risk Assessment. Nat. Hazards 2022, 113, 423–451. [Google Scholar] [CrossRef]
- Lee, K.; Lee, W.H. Earthwork Volume Calculation, 3D Model Generation, and Comparative Evaluation Using Vertical and High-Oblique Images Acquired by Unmanned Aerial Vehicles. Aerospace 2022, 9, 606. [Google Scholar] [CrossRef]
- Meng, X.; Wang, T.; Cheng, D.; Su, W.; Yao, P.; Ma, X.; He, M. Enhanced Point Cloud Slicing Method for Volume Calculation of Large Irregular Bodies: Validation in Open-Pit Mining. Remote Sens. 2023, 15, 5006. [Google Scholar] [CrossRef]
- Jia, H.; Zhu, G.; Guo, L.; He, J.; Liang, B.; He, S. An Improved Point Clouds Model for Displacement Assessment of Slope Surface by Combining TLS and UAV Photogrammetry. Appl. Sci. 2022, 12, 4320. [Google Scholar] [CrossRef]
- Hao, J.; Zhang, X.; Wang, C.; Wang, H.; Wang, H. Application of UAV Digital Photogrammetry in Geological Investigation and Stability Evaluation of High-Steep Mine Rock Slope. Drones 2023, 7, 198. [Google Scholar] [CrossRef]
- Ajayi, O.G.; Ajulo, J. Investigating the applicability of unmanned aerial vehicles (UAV) photogrammetry for the estimation of the volume of stockpiles. Quaest. Geogr. 2021, 40, 25–38. [Google Scholar] [CrossRef]
- Duarte, J.; Rodrigues, M.F.; Santos Baptista, J. Data Digitalisation in the Open-Pit Mining Industry: A Scoping Review. Arch. Comput. Methods Eng. 2021, 28, 3167–3181. [Google Scholar] [CrossRef]
- Bill, R.; Blankenbach, J.; Breunig, M.; Haunert, J.H.; Heipke, C.; Herle, S.; Werner, M. Geospatial Information Research: State of the Art, Case Studies and Future Perspectives. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2022, 90, 349–389. [Google Scholar] [CrossRef]
- Zupancich, A.; Mutri, G.; Caricola, I.; Carra, M.L.; Radini, A.; Cristiani, E. The Application of 3D Modeling and Spatial Analysis in the Study of Groundstones Used in Wild Plants Processing. Archaeol. Anthropol. Sci. 2019, 11, 4801–4827. [Google Scholar] [CrossRef]
- Hamal, S.N.G.; Ulvi, A. 3B Kent Modelleri Oluşturma Sürecinde İHA Fotogrametrisi ve CBS Entegrasyonu: Mersin Üniversitesi Çiftlikköy Kampüsü Örneği. Türkiye Coğrafi Bilgi Sist. Derg. 2022, 4, 97–105. [Google Scholar] [CrossRef]
- Kyriou, A.; Nikolakopoulos, K.G.; Koukouvelas, I.K. Timely and Low-Cost Remote Sensing Practices for the Assessment of Landslide Activity in the Service of Hazard Management. Remote Sens. 2022, 14, 4745. [Google Scholar] [CrossRef]
- Gudowicz, J.; Paluszkiewicz, R. MAT: GIS-Based Morphometry Assessment Tools for Concave Landforms. Remote Sens. 2021, 13, 2810. [Google Scholar] [CrossRef]
- Hu, X.; Xia, B.; Guo, Y.; Yin, Y.; Chen, H. Comprehensive Monitoring of Construction Spoil Disposal Areas in High-Speed Railways Utilizing Integrated 3S Techniques. Appl. Sci. 2025, 15, 762. [Google Scholar] [CrossRef]
- Kölle, M.; Walter, V.; Sörgel, U. Building a Fully-Automatized Active Learning Framework for the Semantic Segmentation of Geospatial 3D Point Clouds. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2024, 92, 131–161. [Google Scholar] [CrossRef]
- Dong, Y.; Li, Y.; Hou, M. The Point Cloud Semantic Segmentation Method for the Ming and Qing Dynasties’ Official-Style Architecture Roof Considering the Construction Regulations. ISPRS Int. J. Geo Inf. 2022, 11, 214. [Google Scholar] [CrossRef]
- Pellerin Le Bas, X.; Froideval, L.; Mouko, A.; Conessa, C.; Benoit, L.; Perez, L. A New Open-Source Software to Help Design Models for Automatic 3D Point Cloud Classification in Coastal Studies. Remote Sens. 2024, 16, 2891. [Google Scholar] [CrossRef]
- Chand, K.; Mankar, A.K.; Koner, R.; Naresh, A.R.V.S. Dump Slope Change Detection and Displacement Monitoring Using UAV Close-Range Photogrammetry. Sādhanā 2024, 49, 277. [Google Scholar] [CrossRef]
- Bamford, T.; Medinac, F.; Esmaeili, K. Continuous Monitoring and Improvement of the Blasting Process in Open Pit Mines Using Unmanned Aerial Vehicle Techniques. Remote Sens. 2020, 12, 2801. [Google Scholar] [CrossRef]
- Tucci, G.; Gebbia, A.; Conti, A.; Fiorini, L.; Lubello, C. Monitoring and Computation of the Volumes of Stockpiles of Bulk Material by Means of UAV Photogrammetric Surveying. Remote Sens. 2019, 11, 1471. [Google Scholar] [CrossRef]
- Bar, N.; McQuillan, A. Q-slope Application to Coal Mine Stability. IOP Conf. Ser.: Earth Environ. Sci. 2021, 833, 012043. [Google Scholar] [CrossRef]
- Esposito, G.; Mastrorocco, G.; Salvini, R.; Oliveti, M.; Starita, P. Application of UAV Photogrammetry for the Multi-Temporal Estimation of Surface Extent and Volumetric Excavation in the Sa Pigada Bianca Open-Pit Mine, Sardinia, Italy. Environ. Earth Sci. 2017, 76, 103. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, J.; Sofia, G.; Tian, Y.; Tarolli, P. Open-Pit Mine Geomorphic Changes Analysis Using Multi-Temporal UAV Survey. Environ. Earth Sci. 2018, 77, 1–18. [Google Scholar] [CrossRef]
- Padró, J.C.; Cardozo, J.; Montero, P.; Ruiz-Carulla, R.; Alcañiz, J.M.; Serra, D.; Carabassa, V. Drone-Based Identification of Erosive Processes in Open-Pit Mining Restored Areas. Land 2022, 11, 212. [Google Scholar] [CrossRef]
- Cheng, G.; Huang, Y.; Li, X.; Lyu, S.; Xu, Z.; Zhao, H.; Zhao, Q.; Xiang, S. Change Detection Methods for Remote Sensing in the Last Decade: A Comprehensive Review. Remote Sens. 2024, 16, 2355. [Google Scholar] [CrossRef]
- Zhu, X.; Yang, H.; Bian, H.; Mei, Y.; Zhang, B.; Xue, P. Multi-Scalar Oblique Photogrammetry-Supported 3D webGIS Approach to Preventive Mining-Induced Deformation Analysis. Appl. Sci. 2023, 13, 13342. [Google Scholar] [CrossRef]
- Stilla, U.; Xu, Y. Change Detection of Urban Objects Using 3D Point Clouds: A Review. ISPRS J. Photogramm. Remote Sens. 2023, 197, 228–255. [Google Scholar] [CrossRef]
- Tangadzani, J.P.; Paradzayi, C.; Muromo, T.G. Application of UAV-Based Photogrammetry in Monitoring Slope Deformations in Open Pit Mining Environments: A Systematic Review. In Proceedings of the FIG Working Week 2024, Accra, Ghana, 19–24 May 2024; 12p. [Google Scholar]
- Liu, X.; Zhu, W.; Lian, X.; Xu, X. Monitoring Mining Surface Subsidence with Multi-Temporal Three-Dimensional Unmanned Aerial Vehicle Point Cloud. Remote Sens. 2023, 15, 374. [Google Scholar] [CrossRef]
- Özdaş, N.; Koçak, M.G.; Karakış, S. Examining the accuracy of DEM of difference and 3D point cloud comparison methods: Open pit mine case study. Jeodezi Ve Jeoinformasyon Derg. 2024, 11, 41–50. [Google Scholar] [CrossRef]
- Cirillo, D.; Zappa, M.; Tangari, A.C.; Brozzetti, F.; Ietto, F. Rockfall Analysis from UAV-Based Photogrammetry and 3D Models of a Cliff Area. Drones 2024, 8, 31. [Google Scholar] [CrossRef]
- CloudCompare. Available online: https://www.danielgm.net/cc/ (accessed on 17 April 2025).
- Caciora, T.; Ilieș, A.; Herman, G.V.; Berdenov, Z.; Safarov, B.; Bilalov, B.; Ilieș, D.C.; Baias, Ș.; Hassan, T.H. Advanced Semi-Automatic Approach for Identifying Damaged Surfaces in Cultural Heritage Sites: Integrating UAVs, Photogrammetry, and 3D Data Analysis. Remote Sens. 2024, 16, 3061. [Google Scholar] [CrossRef]
- Gress, J.C.; Ferreira, M.; Beeuwsaert, L. A Simple and Economical Procedure for the Design of Capping Layers in Earthworks. In International Conference on Transportation Geotechnics; Springer Nature: Singapore, 2024; pp. 33–39. [Google Scholar] [CrossRef]
- Rezaei, S.; Maier, A.; Arefi, H. Quality Analysis of 3D Point Cloud Using Low-Cost Spherical Camera for Underpass Mapping. Sensors 2024, 24, 3534. [Google Scholar] [CrossRef]
- Tang, Q.; Zhang, L.; Lan, G.; Shi, X.; Duanmu, X.; Chen, K. A Classification Method of Point Clouds of Transmission Line Corridor Based on Improved Random Forest and Multi-Scale Features. Sensors 2023, 23, 1320. [Google Scholar] [CrossRef]
- Michałowska, K.; Pirowski, T.; Głowienka, E.; Szypuła, B.; Malinverni, E.S. Sustainable Monitoring of Mining Activities: Decision-Making Model Using Spectral Indexes. Remote Sens. 2024, 16, 388. [Google Scholar] [CrossRef]
- Li, S.; Wang, R.; Wang, L.; Liu, S.; Ye, J.; Xu, H.; Niu, R. An Approach for Monitoring Shallow Surface Outcrop Mining Activities Based on Multisource Satellite Remote Sensing Data. Remote Sens. 2023, 15, 4062. [Google Scholar] [CrossRef]
- Celik, M.Y.; Sabah, E. Geological and Technical Characterisation of Iscehisar (Afyon-Turkey) Marble Deposits and the Impact of Marble Waste on Environmental Pollution. J. Environ. Manag. 2008, 87, 106–116. [Google Scholar] [CrossRef] [PubMed]
- Kuzu, B. Kurudere Köyü (Emirdağ/Afyonkarahisar) Çevresinde Yer Alan Kireçtaşlarının Jeolojisi ve Mermer Olarak Değerlendirilmesinin Araştırılması. Master’s Thesis, Afyon Kocatepe University, Afyonkarahisar, Turkey, 2022. [Google Scholar]
- Kovanič, Ľ.; Topitzer, B.; Peťovský, P.; Blišťan, P.; Gergeľová, M.B.; Blišťanová, M. Review of Photogrammetric and Lidar Applications of UAV. Appl. Sci. 2023, 13, 6732. [Google Scholar] [CrossRef]
- Mulakala, J. Measurement Accuracy of the DJI Phantom 4 RTK & Photogrammetry. DroneDeploy, Published in Partnership with DJI. 2019. Available online: https://www.gim-international.com/files/23b0ad77f81a0aa56e8c83f8c4300270.pdf (accessed on 5 May 2025).
- Kersten, T.P.; Preuß, F.; Teten, D.; Lindstaedt, M. UAV/UAS photogrammetry for use in cadastral surveying. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2025, 48, 169–175. [Google Scholar] [CrossRef]
- Le, H.T.T.; Nguyen, N.V.; Van Nguyen, T.; Le, H.; Nguyen, T.; Phan, L.T.; Tran, H.T. 3D LoD2 Modelling of Halong City Based on UAV Point Cloud. J. Min. Earth Sci. 2024, 65, 1–8. [Google Scholar] [CrossRef]
- Kavaliauskas, P. Utilization of Photogrammetry and Laser Scanning Technologies for Automated Monitoring of the Progress of Construction Works. Doctoral Dissertation, Kaunas University of Technology, Kaunas, Lithuania, 2024; 196p. [Google Scholar]
- Map Pilot Pro. Aerial Map Processing & Flight Control. Available online: https://www.mapsmadeeasy.com/ (accessed on 17 April 2025).
- Agisoft Helpdesk Portal. Available online: https://agisoft.freshdesk.com/support/solutions/articles/31000148780-micasense-rededge-mx-processing-workflow-including-reflectance-calibration-in-agisoft-metashape-pro (accessed on 17 April 2025).
- Hamal, S.N.G.; Ulvi, A. Investigation of Underwater Photogrammetry Method with Cost-Effective Action Cameras and Comparative Analysis between Reconstructed 3D Point Clouds. Photogramm. Eng. Remote Sens. 2024, 90, 251–259. [Google Scholar] [CrossRef]
- Makineci, H.B.; Karabörk, H.; Durdu, A. Comparison of Digital Elevation Models Produced with Photogrammetric Usage of UAV by Geodetic Techniques. TJRS 2020, 2, 58–69. [Google Scholar]
- Evans, A.D.; Cramer, J.; Scholl, V.; Lentz, E. Pragmatically Mapping Phragmites with Unoccupied Aerial Systems: A Comparison of Invasive Species Land Cover Classification Using RGB and Multispectral Imagery. Remote Sens. 2024, 16, 4691. [Google Scholar] [CrossRef]
- Önal, G.; Fidan, D.; Ulvi, A. Açık Ocak Maden Sahalarının İHA Teknolojisi Kullanılarak Tespiti ve Değerlendirilmesi. Türkiye Fotogram. Derg. 2024, 6, 31–38. [Google Scholar] [CrossRef]
- Anders, N.; Valente, J.; Masselink, R.; Keesstra, S. Comparing Filtering Techniques for Removing Vegetation from UAV-Based Photogrammetric Point Clouds. Drones 2019, 3, 61. [Google Scholar] [CrossRef]
- Over, J.-S.R.; Ritchie, A.C.; Kranenburg, C.J.; Brown, J.A.; Buscombe, D.D.; Noble, T.; Sherwood, C.R.; Warrick, J.A.; Wernette, P.A. Processing Coastal Imagery with Agisoft Metashape Professional Edition, Version 1.6—Structure from Motion Workflow Documentation; US Geological Survey: Reston, VA, USA, 2021. [Google Scholar]
- Hamal, S.N.G. Investigation of Underwater Photogrammetry Method: Challenges and Photo Capturing Scenarios of the Method. Adv. Underw. Sci. 2023, 3, 19–25. [Google Scholar]
- Murtiyoso, A.; Grussenmeyer, P.; Börlin, N.; Vandermeerschen, J.; Freville, T. Open Source and Independent Methods for Bundle Adjustment Assessment in Close-Range UAV Photogrammetry. Drones 2018, 2, 3. [Google Scholar] [CrossRef]
- Verykokou, S.; Ioannidis, C. Exterior Orientation Estimation of Oblique Aerial Images Using SfM-Based Robust Bundle Adjustment. Int. J. Remote Sens. 2020, 41, 7233–7270. [Google Scholar] [CrossRef]
- Kumari, U.; Rana, S. 3D Modeling: Camera Movement Estimation and Path Correction for SFM Model Using the Combination of Modified A-SIFT and Stereo System. arXiv 2025, arXiv:2503.17668. [Google Scholar]
- Fan, B.; Dai, Y.; Zhang, Z.; Wang, K. Differential SfM and Image Correction for a Rolling Shutter Stereo Rig. Image Vis. Comput. 2022, 124, 104492. [Google Scholar] [CrossRef]
- Park, S.Y.; Seo, D.; Lee, M.J. GEMVS: A Novel Approach for Automatic 3D Reconstruction from Uncalibrated Multi-View Google Earth Images Using Multi-View Stereo and Projective to Metric 3D Homography Transformation. Int. J. Remote Sens. 2023, 44, 3005–3030. [Google Scholar] [CrossRef]
- Karakaya, E.H.; Ulvi, A. İHA Fotogrametrisi Kullanarak Tarihi Alanların Üç Boyutlu Belgelenmesi: Soli Pompeiopolis Antik Kenti Örneği. Türkiye Fotogram. Derg. 2024, 6, 39–47. [Google Scholar] [CrossRef]
- Shi, X.; Liu, T.; Han, X. Improved Iterative Closest Point (ICP) 3D Point Cloud Registration Algorithm Based on Point Cloud Filtering and Adaptive Fireworks for Coarse Registration. Int. J. Remote Sens. 2020, 41, 3197–3220. [Google Scholar] [CrossRef]
- Guan, W.; Li, W.; Ren, Y. Point Cloud Registration Based on Improved ICP Algorithm. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1461–1465. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D Comparison of Complex Topography with Terrestrial Laser Scanner: Application to the Rangitikei Canyon (NZ). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- de Gélis, I.; Lefèvre, S.; Corpetti, T. Change Detection in Urban Point Clouds: An Experimental Comparison with Simulated 3D Datasets. Remote Sens. 2021, 13, 2629. [Google Scholar] [CrossRef]
- Winiwarter, L.; Anders, K.; Schröder, D.; Höfle, B. Full 4D Change Analysis of Topographic Point Cloud Time Series Using Kalman Filtering. Earth Surf. Dyn. Discuss. 2022, 14, 1–25. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Gonçalves, G.R. Surveying Coastal Cliffs Using Two UAV Platforms (Multirotor and Fixed-Wing) and Three Different Approaches for the Estimation of Volumetric Changes. Int. J. Remote Sens. 2020, 41, 8143–8175. [Google Scholar] [CrossRef]
- Wondolowski, M.; Hain, A.; Motaref, S. Experimental Evaluation of 3D Imaging Technologies for Structural Assessment of Masonry Retaining Walls. Results Eng. 2024, 21, 101901. [Google Scholar] [CrossRef]
- Ritter, S.; Staub, K.; Eppenberger, P. Associations between Relative Body Fat and Areal Body Surface Roughness Characteristics in 3D Photonic Body Scans—A Proof of Feasibility. Int. J. Obes. 2021, 45, 906–913. [Google Scholar] [CrossRef]
- Camara, M.; Wang, L.; You, Z. Three-Dimensional Point Cloud Displacement Analysis for Tunnel Deformation Detection Using Mobile Laser Scanning. Appl. Sci. 2025, 15, 625. [Google Scholar] [CrossRef]
- Xiao, Y.; Li, B.; Xu, W.; Zhou, W.; Xu, B.; Zhang, H. Optimization of a Dense Mapping Algorithm with Enhanced Point-Line Features for Open-Pit Mining Environments. Appl. Sci. 2025, 15, 3579. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Chand, M.B.; Watanabe, T. Development of Supraglacial Ponds in the Everest Region, Nepal, between 1989 and 2018. Remote Sens. 2019, 11, 1058. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Scalar Field | Label |
|---|---|---|
| Dump | >+2.0 m | “Dump” |
| Excavation | <−2.0 m | “Excavation” |
| Stable | −2.0 m to +2.0 m | “Stable” |
| Point ID | 2024 | 2025 | Avg. (2024, 2025) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ∆X | ∆Y | ∆Z | RMSE | ∆X | ∆Y | ∆Z | RMSE | RMSE | |
| CP01 | 1.40 | 1.50 | 3.05 | 3.54 | 1.50 | 1.54 | 3.15 | 3.63 | 3.58 |
| CP02 | 1.65 | 1.35 | 3.25 | 3.75 | 1.75 | 1.45 | 3.35 | 3.77 | 3.76 |
| CP03 | 1.45 | 1.30 | 3.10 | 3.52 | 1.55 | 1.40 | 3.20 | 3.61 | 3.57 |
| CP04 | 1.55 | 1.45 | 3.15 | 3.66 | 1.65 | 1.55 | 3.25 | 3.72 | 3.69 |
| CP05 | 1.50 | 1.55 | 3.30 | 3.80 | 1.60 | 1.65 | 3.50 | 3.89 | 3.84 |
| CP06 | 1.65 | 1.40 | 3.45 | 3.92 | 1.75 | 1.50 | 3.55 | 3.95 | 3.93 |
| CP07 | 1.55 | 1.30 | 3.20 | 3.61 | 1.65 | 1.40 | 3.30 | 3.66 | 3.67 |
| CP08 | 1.50 | 1.50 | 3.20 | 3.71 | 1.60 | 1.60 | 3.30 | 3.77 | 3.74 |
| Avg. | 1.53 | 1.42 | 3.21 | 3.66 | 1.63 | 1.51 | 3.32 | 3.82 | 3.85 |
| Class | Surface Area (m2) | Volume (m3) | Description |
|---|---|---|---|
| Stable | 150,104.5 | ±0.00 | Reference region, no change |
| Dump | 7435.75 | +7744.04 | Material dump, south-west intensive |
| Excavation | 7844.50 | –8359.72 | Material removal |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yiğit, A.Y.; Şenol, H.İ. Surface Change and Stability Analysis in Open-Pit Mines Using UAV Photogrammetric Data and Geospatial Analysis. Drones 2025, 9, 472. https://doi.org/10.3390/drones9070472
Yiğit AY, Şenol Hİ. Surface Change and Stability Analysis in Open-Pit Mines Using UAV Photogrammetric Data and Geospatial Analysis. Drones. 2025; 9(7):472. https://doi.org/10.3390/drones9070472
Chicago/Turabian StyleYiğit, Abdurahman Yasin, and Halil İbrahim Şenol. 2025. "Surface Change and Stability Analysis in Open-Pit Mines Using UAV Photogrammetric Data and Geospatial Analysis" Drones 9, no. 7: 472. https://doi.org/10.3390/drones9070472
APA StyleYiğit, A. Y., & Şenol, H. İ. (2025). Surface Change and Stability Analysis in Open-Pit Mines Using UAV Photogrammetric Data and Geospatial Analysis. Drones, 9(7), 472. https://doi.org/10.3390/drones9070472