1. Introduction
1.1. Background and Motivation
The rapid development of urban air mobility (UAM) and the increasing use of unmanned aerial vehicles (UAVs) for various applications such as surveillance, cargo delivery, emergency response, and infrastructure monitoring demand the creation of structured and safe aerial traffic systems [
1]. Air corridors have emerged as a practical solution to organize UAV movement in controlled and predictable paths, especially in urban environments where airspace is limited, and ground-based risks are significant (
Figure 1).
The rapid evolution of unmanned aerial vehicles (UAVs) has broadened the scope of aerial technologies far beyond traditional applications. UAVs now include a new generation of electric vertical takeoff and landing (eVTOL) aircraft designed not only for cargo delivery and surveillance but also for transporting people in densely populated urban areas. These advancements are driving the emergence of urban air mobility (UAM) systems—an integrated aerial transport layer envisioned to coexist with existing ground transport systems. As these systems mature, their successful operation increasingly hinges on the reliability of underlying infrastructure, particularly robust and fault-tolerant communication networks.
A key differentiator of modern UAM systems is the stringent safety requirements inherited from general aviation. Catastrophic failure probabilities must meet extremely low thresholds—on the order of 10
−9 failures per flight hour for critical systems such as propulsion or flight control modules [
2]. These requirements are essential for public trust, regulatory compliance, and insurance frameworks.
Although many UAV deployments—especially in logistics—operate in environments with relatively resilient ground infrastructure, the assumption of “near-zero failure” in communication systems is not universally valid. This is particularly true when UAVs operate in constrained airspaces, during emergency deployments, or in extreme weather or military scenarios. Furthermore, in UAM settings where aircraft navigate autonomously or semi-autonomously through complex urban environments, reliable and redundant communication with ground-based systems is critical not just for operational efficiency, but for the prevention of catastrophic failures. As highlighted in recent work by Faiçal et al. [
3], communication reliability is one of the primary enablers and safety barriers for drone-based last-mile delivery systems, which are foundational elements of future UAM networks.
Against this background, the growing scale of UAM applications adds urgency to the analysis. Market projections anticipate a dramatic surge in demand for passenger UAV services. For example, the ASSURE A36 report [
4] forecasts that, by 2045, U.S. domestic UAM operations will exceed 85 million flights annually, with cumulative flights reaching over 500 million between 2024 and 2045. The widespread deployment of these services will intensify the demand for scalable, fault-tolerant communication architectures to manage air traffic, support onboard autonomy, and maintain safety in increasingly congested urban skies.
In this context, the relevance of evaluating failure-tolerant deployment strategies—even under idealized or high-failure scenarios—is not only methodological but also anticipatory. As the operational and regulatory requirements evolve, analytical tools that allow flexible reliability assessments will play a vital role in UAM planning and infrastructure investment decisions.
A recent study by Swanke and Jahns [
5] demonstrates the good applicability of Markov chains to UAM systems in quantifying the reliability of fault-tolerant aviation architectures. They show that redundancy strategies and repair dynamics significantly influence system-level catastrophic failure rates and must be modeled explicitly, even when individual component failure rates are already low.
To analyze the impact of communication node reliability on mission success, this paper proposes a Markov-based framework for assessing repeater deployment strategies and system-level robustness. It is important to clarify that the modeling assumptions, including component failure probabilities, do not claim to simulate real-world failure rates directly. Instead, the models are designed to support sensitivity analyses—exploring the effectiveness of various deployment configurations and redundancy strategies across a range of conditions. The failure probabilities in the Markov chains are adjustable parameters—allowing the approach to be tailored for environments with both low and high infrastructure failure risks.
A fundamental requirement in civil aviation—for both manned and unmanned operations—is the maintenance of continuous, reliable communication between aircraft and ground control [
6]. This communication is typically conducted over very high-frequency (VHF) radio channels, which operate effectively only within line-of-sight conditions. While this constraint is manageable in conventional aviation at cruising altitudes, it poses a significant challenge for UAM systems operating at lower altitudes within complex urban environments. Tall buildings, narrow corridors, and rapidly changing altitudes in urban canyons can obstruct line-of-sight paths, leading to signal degradation or temporary communication loss [
7]. As a result, UAM systems must incorporate enhanced communication architectures to ensure compliance with aviation safety regulations and to preserve continuous situational awareness in high-density, obstacle-rich environments.
This imposes strict requirements on the continuity and reliability of the communication infrastructure. A momentary loss of connection may result in navigation errors, mission failure, or even safety incidents, particularly when multiple UAVs operate in shared airspace.
To address this challenge, one promising approach involves deploying a network of radio repeater stations (RS) along the UAV flight corridor. These stations serve as communication relays that maintain continuous contact with UAVs as they traverse the corridor [
8]. However, the question of how to best deploy these repeaters to balance reliability, cost, and redundancy remains open.
This study is motivated by the need to systematically analyze and compare different deployment strategies of repeater stations to ensure communication reliability under various operational scenarios. By evaluating the performance and resource implications of each strategy, this research aims to support the design of resilient and scalable UAV corridor infrastructure. Ultimately, the findings contribute to safer integration of UAVs into the airspace and more robust implementation of the air mobility concept in both urban and non-urban settings.
1.2. Related Works
In designing advanced drone systems, maintaining the connection between the aircraft and the control center represents a fundamental challenge. Standard affordable wireless components suffer from limited range and vulnerability to physical obstructions. Implementing relay networks offers an effective solution to these limitations, significantly enhancing drone communication capabilities during beyond-line-of-sight operations and when navigating environments with obstacles blocking direct transmission paths.
The study [
8] develops and tests a communication relay system for beyond-line-of-sight operations involving UAVs, specifically using one quadrotor to relay radio communications to another. The process involved constructing UAVs as airborne platforms, selecting and assembling hardware for the relay system, and developing software for mission control and communication.
The paper [
9] focuses on optimizing the placement of relay UAVs to maximize end-to-end packet delivery ratio in multi-hop networks. It discusses dynamic relay positioning and proposes a distributed method for optimal placement, improving data throughput by up to 15%
The article [
10] reviews the evolution of UAM expected to address the challenges of traditional ground-based transportation such as congestion and high infrastructure costs. It highlights the impact of drones and the collaboration between aviation and automotive industries to develop UAM, which promises to be an environmentally friendly, cost-effective, and faster alternative.
Cellular networks, owing to their widespread base station infrastructure, have emerged as strong candidates for delivering these connectivity solutions to UAVs operating in airspace [
11]. However, traditional cellular networks are inherently optimized for terrestrial users. Specifically, base station antennas are generally down-tilted to provide optimal coverage at ground level, resulting in inconsistent and often inadequate coverage at higher altitudes where aerial vehicles operate [
12,
13].
In addition to coverage issues, UAVs can introduce substantial uplink interference due to their line-of-sight visibility to multiple base stations simultaneously operating on the same frequencies. This phenomenon can disrupt cellular services for users on the ground [
14,
15]. Hence, while cellular networks hold the potential for supporting UAM, their use demands specialized optimization strategies to ensure reliable aerial coverage while preserving the integrity of ground-level services.
Ultra-reliable urban air mobility networks are described in the study [
16]. It proposes solutions like optimal antenna tilting, frequency reuse with narrow beams, and assistive transmission from a master UAM to improve link reliability to 99.9%
A novel probability model for urban air mobility is discussed in [
17]. This study introduces a line-of-sight probability model that accounts for urban topography and dynamic ground vehicle positioning to improve interference prediction and ensure reliable communication in high-density aerial traffic.
The conventional terrestrial networks for communication support in UAM, reliant on fixed base stations, are limited in their ability to offer continuous coverage. Additionally, remote or underdeveloped regions, such as mountainous terrains or oceanic expanses, often lack the necessary infrastructure for reliable network access [
18].
To overcome these limitations and realize the expansive vision of sixth-generation (6G) mobile communication technology, researchers are turning their focus to a next-generation architecture known as space–air–ground integrated networks (SAGINs). SAGINs integrate terrestrial networks (TNs) with non-terrestrial networks (NTNs), combining satellites, aerial platforms (such as UAVs or high-altitude platforms), and ground-based infrastructure into a unified, layered network with high mobility and broad spatial reach [
19]. In recent years, SAGINs have emerged as a prominent research direction in the mobile communication landscape. To support its development, the 3rd Generation Partnership Project has been actively working on standardizing critical technologies, including satellite radio access, NTN core systems, and NTN-supported Internet of Things (IoT) applications [
20]. As a key technological pillar of future 6G networks, SAGINs are anticipated to reshape the foundational architecture of global communication systems.
Despite its potential, the advancement of SAGIN faces considerable challenges. One major issue stems from the vulnerability of end-to-end communication between space and ground segments. These links can be severely impacted by adverse weather conditions and space weather phenomena such as solar storms, compromising connectivity and reliability. In densely built urban environments, additional challenges arise, as satellite-ground signals are often weakened or blocked due to building penetration losses and signal attenuation caused by obstacles [
20,
21].
The paper [
22] provides a systematic review of UAV-assisted SAGINs, which are enhanced with 6G technology to offer seamless coverage and efficient connectivity by integrating terrestrial, aerial, and satellite networks. It explores the hierarchical architecture, the dynamic characteristics of SAGINs, and the specific roles of UAVs within this framework.
The paper [
23] explores the development of UAM, a burgeoning aviation sector that leverages electric vertical takeoff and landing aircraft for secure, efficient, and environmentally friendly transportation in urban, suburban, and remote areas. The paper highlights challenges such as inadequate wireless coverage in dense urban areas and disconnected rural settings, which complicate large-scale deployment of UAM. It also addresses issues in air-to-ground connectivity that could overload terrestrial networks and impact link reliability during the immediate recovery phase. It discusses the necessity of high connectivity to manage eVTOL traffic in crowded urban skies.
The study [
24] addresses the challenges facing UAV-assisted air-to-ground data transmissions, including issues with terminal mobility, channel fading, resource constraints, and specific transmission requirements.
The multi-link communication model offers significant advantages overrelying on a single data link [
25,
26,
27]. One of its primary benefits is the increase in redundancy, which enhances system reliability. Additionally, it improves the overall performance of the communication network, ensuring that various applications can function effectively even under differing or dynamic operational conditions.
1.3. Research Gap, Contributions, and Paper Structure
The rapid evolution of UAM necessitates the design of reliable communication infrastructures to ensure the safe, coordinated operation of UAVs in structured air corridors. While previous studies have addressed relay-based communication and aerial network planning, a major gap remains in the quantitative comparison of repeater deployment strategies under realistic reliability constraints. Existing works do not provide a unified modeling framework for evaluating communication availability based on redundancy configurations, coverage overlap, and corridor topology. Additionally, there is a lack of guidance for the strategic placement of radio repeater stations tailored to urban UAV corridor scenarios with varying reliability demands.
This paper addresses the above gap by proposing a systematic framework for designing and evaluating communication strategies for UAV corridors. The main contributions are as follows:
Four deployment strategies (non-overlapping, fully overlapping, alternating redundant, and fully duplicated coverage) are defined and analyzed based on redundancy level, resource cost, and applicability.
The study introduces a set of continuous-time Markov chain models to quantify communication availability and unavailability under different deployment strategies, accounting for UAV traffic load and radio station failure/repair dynamics.
The paper compares strategies in terms of both infrastructure requirements and achieved reliability, demonstrating exponential gains in availability with increasing redundancy and identifying optimal strategies for different operational scenarios.
The proposed framework is applied to a case study in the Greenline district of Astana, Kazakhstan, demonstrating how strategy selection and repeater placement can be adapted to real corridor geometry and urban communication challenges.
A step-by-step methodology is presented for planning repeater-based UAV corridor networks, supporting segmented deployment, non-linear path layouts, and strategy optimization.
While some forms of communication redundancy, such as overlapping coverage and relay-based transmission, have been discussed in prior works on UAV networking and ground communication infrastructure, the four deployment strategies presented in this paper are, to the best of the authors’ knowledge, the first to be formalized and comparatively analyzed within a unified Markov modeling framework specific to structured air mobility corridors. These strategies—ranging from non-overlapping coverage to full duplication—represent an adaptation and extension of existing redundancy concepts, tailored specifically to the operational and geometric constraints of urban UAV corridors.
Strategy 1 reflects the minimal baseline seen in legacy point-to-point radio systems, while Strategy 2 aligns with standard dual-coverage designs used in high-reliability applications. Strategy 3 introduces a novel alternating redundancy configuration that balances resource use and fault tolerance and is not found in prior literature in this form. Strategy 4 builds on principles from critical system engineering, combining full overlap and physical duplication, akin to fail-operational designs in aviation-grade systems.
By articulating these configurations as discrete, comparable strategies, this work provides a structured design space and evaluation methodology for planners and system integrators working on UAM communication infrastructure.
The remainder of this paper is organized as follows.
Section 2 describes the proposed communication strategies and the Markov modeling approach for analyzing communication availability.
Section 3 presents the quantitative results comparing the deployment strategies, including resource requirements, reliability performance, and a detailed case study implementation in Astana.
Section 4 discusses practical implications, system design guidelines, adaptation to complex corridor layouts, and future research directions.
Section 5 concludes the paper by summarizing the key findings and outlining the broader relevance of the proposed approach for urban air mobility communication infrastructure design.
2. Materials and Methods
2.1. Radio Network Architectures for Corridor Coverage
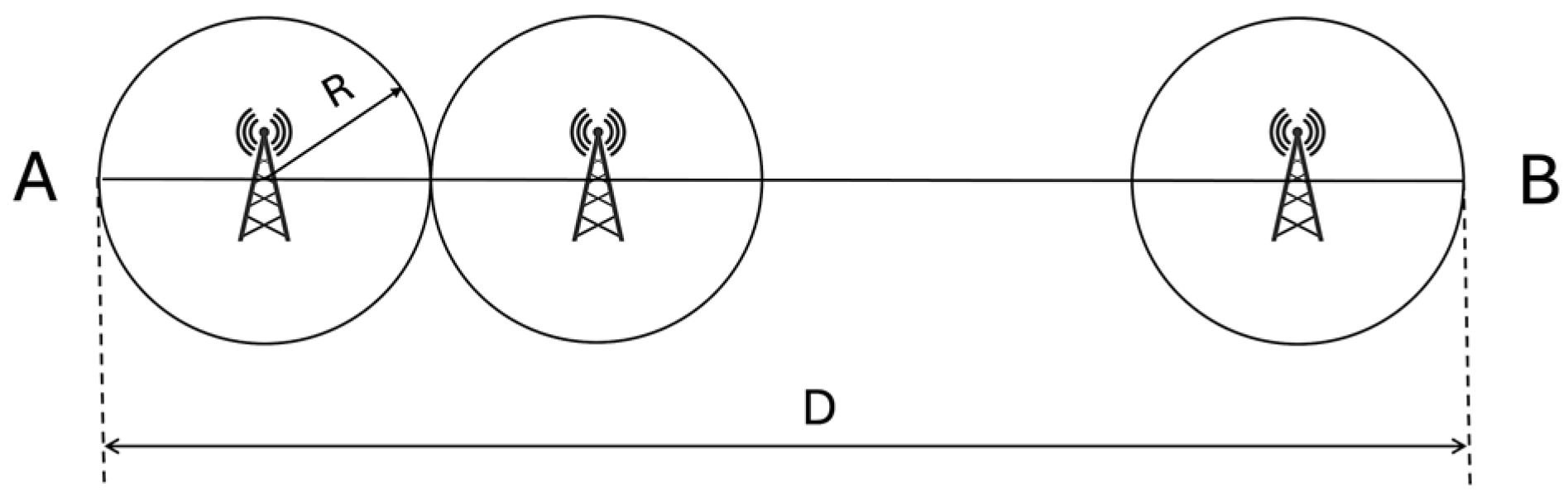
This study examines four distinct strategies for deploying radio repeater stations along UAV air corridors to ensure continuous and reliable communication between UAVs and ground control systems. The analysis focuses on the spatial arrangement of repeaters, the extent of coverage overlap, and the resulting level of communication redundancy. Each strategy is represented graphically and conceptually, using a simplified model of a straight corridor between two points, A and B, with a total length, . The coverage radius of each radio repeater is denoted as .
The deployment strategies are defined as follows.
Strategy 1. Non-overlapping coverage (single coverage).
In the first deployment strategy, radio repeater stations are arranged along the UAV flight corridor at regular intervals such that their coverage zones, each with a radius,
, are adjacent but do not intersect (
Figure 2).
The distance between two neighboring repeaters is exactly , which ensures that the entire corridor is covered without any gaps but also without any redundancy. At any given point along the corridor, a UAV is within a communication range of only one radio station.
The total number of repeaters
for the first strategy is
This configuration is the most efficient in terms of the number of repeaters required to span the full corridor length, making it cost-effective and simple to implement. However, it lacks resilience: if any single repeater fails, communication is completely lost within its segment, potentially compromising UAV safety and control. As a result, this strategy is suitable only for low-risk environments where the likelihood and consequence of communication loss are minimal.
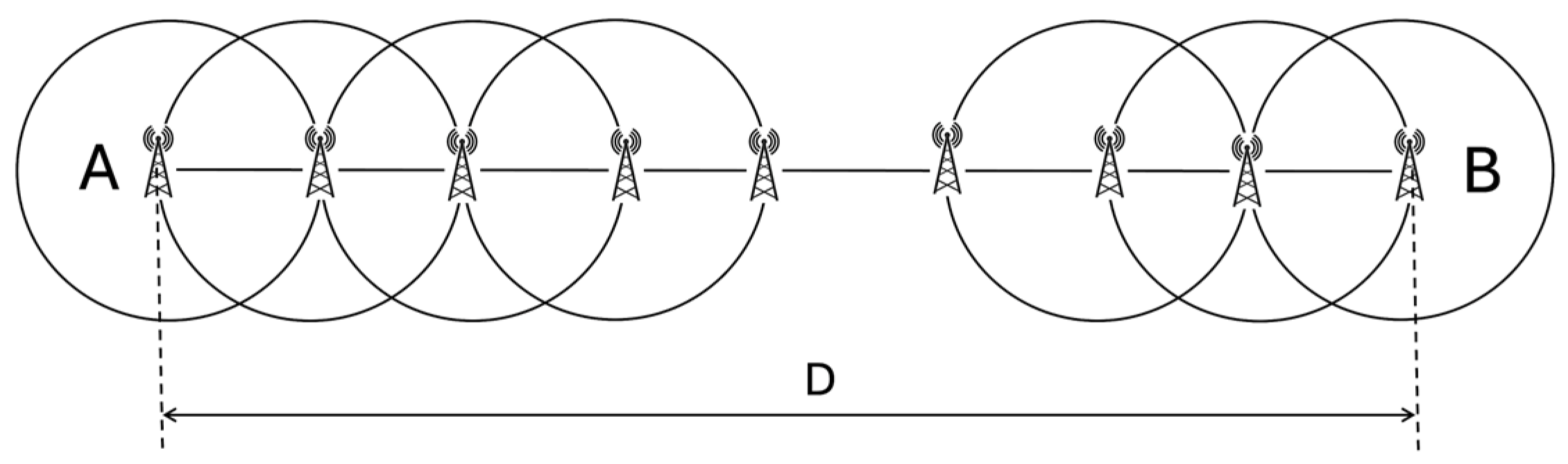
Strategy 2. Fully overlapping coverage (dual coverage).
The second strategy improves reliability by positioning the radio repeater stations closer together so that each coverage zone overlaps fully with the next (
Figure 3).
In this case, the spacing between adjacent stations is reduced to , meaning that the edge of one station’s coverage area reaches the center of the next. This design ensures that every point along the UAV corridor is simultaneously covered by two radio stations. If one repeater fails, the other can continue to maintain communication with any UAV in the affected zone. This overlapping configuration significantly enhances redundancy and fault tolerance, making it highly reliable for urban environments or critical operations where communication must always be preserved. The trade-off is an increased number of repeater stations required to cover the same corridor length, resulting in higher installation and maintenance costs. Nevertheless, this strategy is often justified in scenarios where safety and uninterrupted data exchange are top priorities.
The total number of repeaters
for the first strategy is
Since the distance between stations is , twice as many repeaters are needed compared to Strategy 1 for the same corridor length, ensuring each point is within range of two stations.
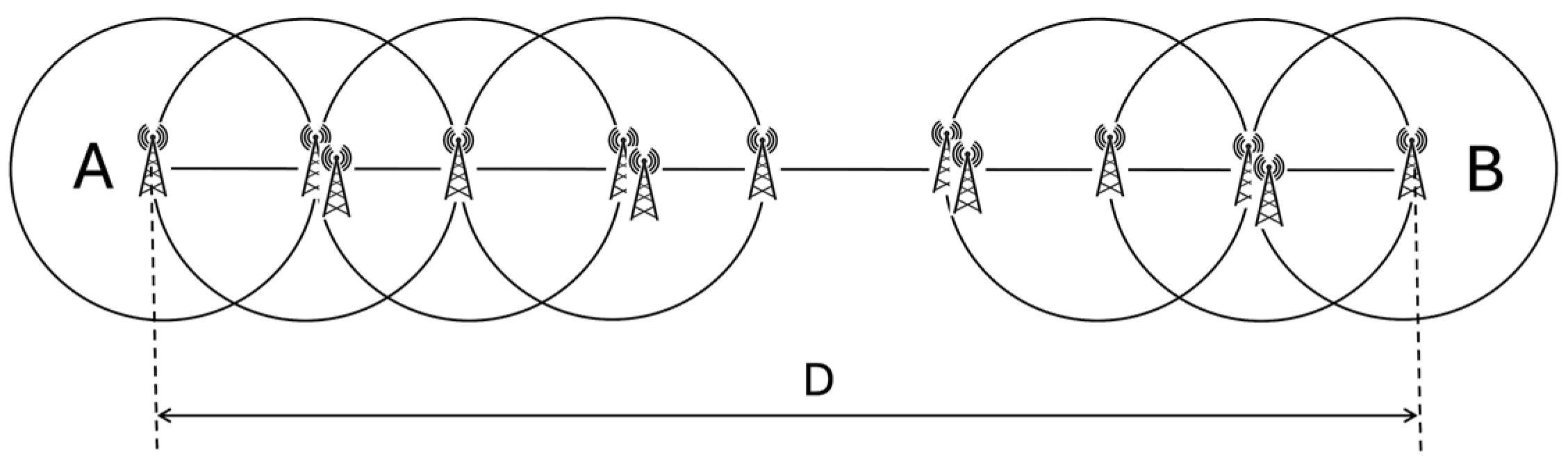
Strategy 3. Alternating redundant coverage (mixed redundancy).
The third strategy introduces a balanced approach that provides enhanced communication reliability while optimizing resource use. In this configuration, repeater stations are spaced at intervals of
, like Strategy 2, but redundancy is added selectively. Every second station along the corridor is duplicated, forming alternating patterns of single stations and paired stations (
Figure 4).
This creates a “single–pair–single–pair” arrangement that results in overlap by three stations of coverage zones across the corridor. The design ensures that even if two adjacent stations fail, communication can still be maintained by a functioning repeater within range.
Let
be the number of base positions spaced at
intervals
Out of these base positions, approximately half are duplicated
For simplicity, we can approximate
This staggered redundancy pattern provides a high level of fault tolerance. Strategy 3 is particularly useful for corridors where operational risk is moderate to high, but where budget or logistical constraints are present.
Strategy 4. Fully overlapping coverage with complete duplication.
In this strategy, radio repeater stations are placed along the UAV flight corridor at intervals of
, as in Strategy 2, ensuring full overlap between the coverage zones of adjacent stations. However, unlike Strategy 2, each of these positions is occupied by two fully independent and redundant radio repeaters (
Figure 5). This means that every planned location along the corridor contains a pair of co-located repeaters working in parallel.
Strategy 4 requires the same number of locations as Strategy 2, but twice the number of actual repeater units:
As a result, each point along the corridor is covered by at least four independent radio units—two from the local station and two from the adjacent one—significantly increasing the overall communication reliability.
2.2. Markov Modeling of Communication Reliability and Estimation of Availability Metrics
To evaluate and compare the communication reliability of different radio repeater deployment strategies within the UAV corridor, this subsection presents a modeling approach based on continuous-time Markov chains (CTMCs). Each strategy is characterized by a distinct configuration of radio station redundancy and spatial arrangement, which directly affects the probability of communication availability at any given point along the corridor.
The reliability analysis in this study is formulated using the CTMC model, which is a standard method for evaluating system availability and mean time to failure in fault-tolerant architectures. Each state in the model represents a discrete operational mode of the communication system, characterized by the number of active repeaters remaining functional. Transitions between states occur due to failure or repair events, governed by exponential probability distributions with constant failure,
, and repair,
, rates. The derivation of the steady-state probabilities and system availability,
, follows the classical balance equation approach described in standard references such as [
28,
29]. Specifically, the Kolmogorov forward equations are solved to determine the long-run state probabilities, which are then used to compute the system’s availability as the sum of probabilities of all operational states. This analytical framework is well established in communication system reliability studies and is adapted here to evaluate the performance of various repeater deployment strategies under fault scenarios.
This section presents the general form of the Markov models, discusses the derivation of stationary state probabilities, and introduces the mathematical formulations for evaluating communication availability and unavailability across the corridor.
2.2.1. Markov State-Transition Diagrams for Different Deployment Strategies
Strategy 1.
The system is modeled as a continuous-time Markov chain where each state,
, describes the status of a single radio station and the number of UAVs currently connected to it for communication (
Figure 6).
Each system state is denoted as , where indicates the failure status of the radio station (0 for operational, 1 for failed), and represents the number of UAVs currently engaged in communication within the station’s coverage area. The model assumes a maximum number of simultaneously supported UAV sessions, denoted as .
Communication requests from UAVs are modeled as a Poisson process with an average interarrival time , resulting in an arrival rate of . The duration of each communication session follows an exponential distribution with a mean of , corresponding to a service rate of . The communication load on the system is characterized by the traffic intensity parameter of , which indicates the expected number of concurrent sessions in a stable system.
The reliability of the radio station itself is captured through two additional parameters: the failure rate , and the repair rate , both expressed as exponential rates. These parameters govern the transitions between the operational and failed states of the repeater. Together, this set of parameters enables the construction of a two-dimensional continuous-time Markov chain that captures both system availability and communication capacity dynamics.
Strategy 2.
The Markov chain shown in
Figure 7 models the communication reliability for Strategy 2, where each point in the UAV corridor is simultaneously covered by two independent radio stations. Communication is considered available as long as at least one of the two stations is operational.
This Markov model accounts for redundant coverage, allowing UAVs to maintain communication even if one station fails. Communication becomes unavailable only in states , where both radio stations are failed (i.e., ).
Strategy 3.
The transition graph shown in
Figure 8 models the system behavior under Strategy 3, where radio repeater stations are deployed with alternating redundancy: every second station is duplicated, while others are single. At any given point along the UAV corridor, a UAV may be covered by up to three independent radio stations depending on its position relative to the station layout.
This model reflects the key feature of Strategy 3—mixed redundancy, where coverage alternates between full, partial, and minimal redundancy based on the position in the corridor. In the worst-case scenario, communication becomes unavailable only when all three covering stations fail, i.e., in states .
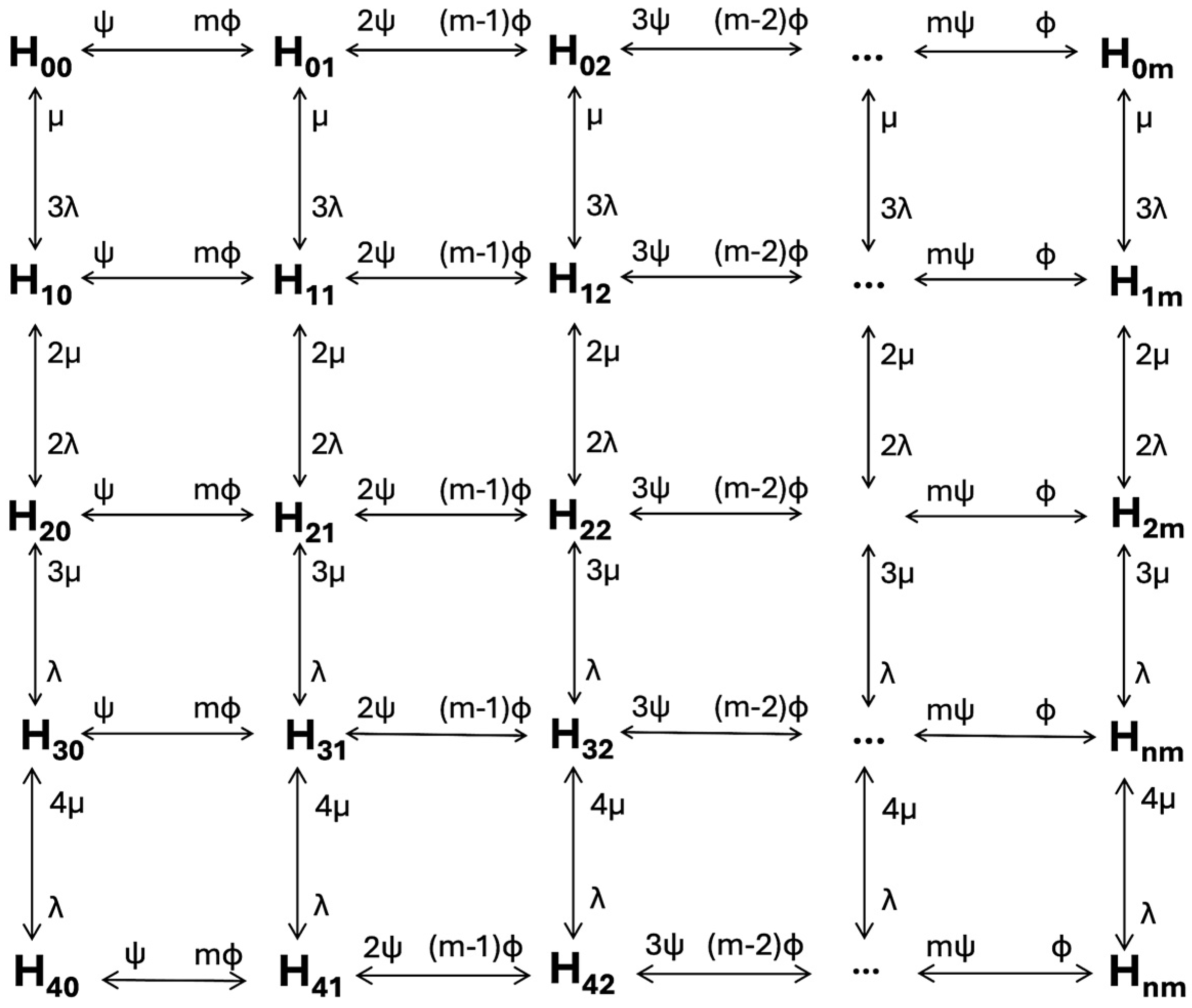
Strategy 4.
The transition graph shown in
Figure 9 represents Strategy 4, in which each radio repeater station in the UAV corridor is duplicated, and these stations are placed at intervals of
, providing full overlapping coverage. This means each point in the corridor is simultaneously covered by four independent radio units—two at the current location and two from the adjacent one. The system is designed to provide maximum reliability and remain operational even if multiple stations fail.
2.2.2. Reliability of Communication Service Estimation
Based on the state-transition diagrams presented in
Figure 6,
Figure 7,
Figure 8 and
Figure 9, the system of Chapman–Kolmogorov equations can be constructed in accordance with standard modeling principles [
30]. These equations describe the dynamics of the Markov process governing the system behavior under each strategy.
For the continuous-time Markov chains used in this study, state transitions are governed by an infinitesimal generator matrix , where each element represents the instantaneous transition rate from state to state .
Assuming each point in the corridor is covered by nnn radio stations and can serve up to mmm UAVs simultaneously, the transition rates are defined as follows:
UAV arrival (increasing load): , where is the arrival rate and reflects the number of operational stations available to accept new UAV connections.
UAV departure (releasing load): , where is the UAV service rate, and is the number of active connections.
Station failure (loss of communication capacity): , where is the per-unit failure rate.
Station repair (recovery of capacity): , where is the per-unit repair rate.
Let
denote the steady-state probability of being in state
. These probabilities satisfy the global balance equations:
By solving the resulting system of steady-state equations, we derive an expression for the stationary probabilities, , of being in state , where the following applies:
is the number of failed radio stations ().
is the number of UAVs currently in communication ().
is the number of radio stations covering each point of the corridor:
for Strategy 1 (single coverage).
for Strategy 2 (fully overlapping coverage).
for Strategy 3 (alternating redundancy).
for Strategy 4 (complete duplication with full overlap).
The stationary probabilities
are given as
where
,
,
,
is the stationary probability of the system being in state
(all stations operational, no active UAV sessions).
To determine
, the normalization condition is used:
Substituting the expressions for
and solving the resulting equation yields
The availability,
, of the communication channel is defined as the probability that at least one station is operational and that the system has sufficient capacity to serve the incoming UAVs. This is calculated as
where
To complement this measure, the unavailability,
, is introduced as a direct indicator of the risk of communication interruption or service denial at a given point in the corridor:
This parameter represents the total probability of the system being in a failed or blocked state, making it a key indicator in evaluating the reliability and continuity of communication service for UAVs across different strategies.
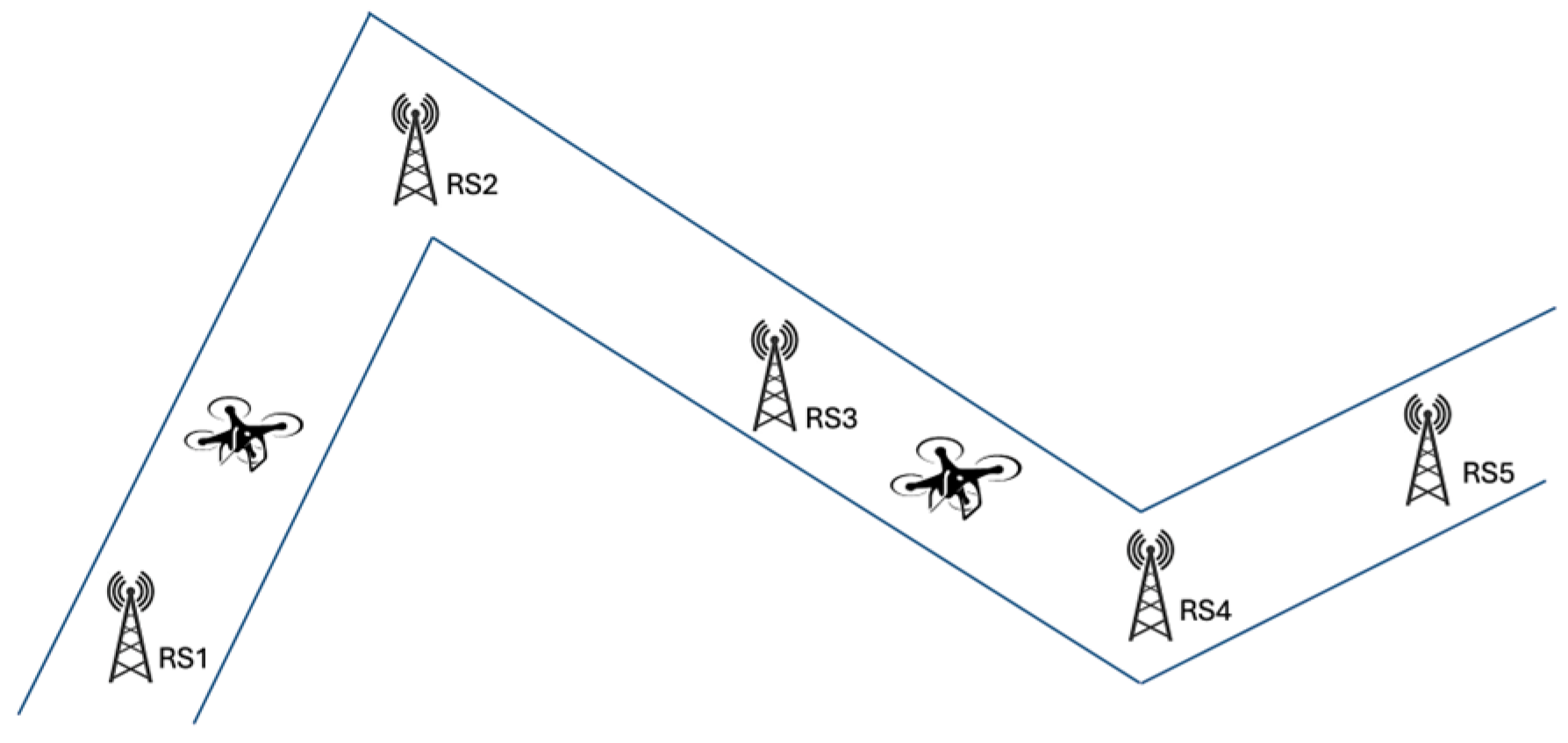
2.3. Adapting Air Mobility Communication Design in Broken-Line UAV Corridor Topologies
The preceding analysis has focused on idealized linear corridors. However, real-world UAV air corridors in urban environments frequently follow non-linear paths with multiple bends and segments, as illustrated in
Figure 10. This section extends the deployment strategies and reliability analysis to these more complex corridor configurations.
For non-linear corridors with multiple segments, the deployment strategy requires strategic adaptation of the principles established earlier. Radio stations must be positioned at each bend or node of the corridor (as shown with RS2 and RS4 in
Figure 10), serving both as communication hubs and critical navigation reference points. These strategically located stations provide essential coverage at decision points where UAVs must change direction while establishing reliable reference points for navigation using radio direction finder techniques like those long employed in traditional aviation.
Adjacent radio stations must operate on different frequencies to prevent interference while enabling UAVs to distinguish between signals from multiple sources. This frequency separation allows UAVs to determine their relative position through signal strength comparisons, navigate accurately along the intended path, and transition smoothly between corridor segments by homing in on the next node’s frequency. Each straight segment between nodes is treated as an individual linear corridor where the previously analyzed deployment strategies can be applied, with the selection varying between segments based on length, criticality, environmental conditions, population density beneath the segment, and expected UAV traffic volume.
The reliability analysis for non-linear corridors builds upon the Markov modeling approach established earlier, with particular attention to node criticality. Nodes represent potential single points of failure if not properly reinforced, as UAVs must receive clear signals to execute direction changes, and loss of node coverage could affect multiple corridor segments. To address this vulnerability, radio stations at nodes should implement Strategy 4 (complete duplication) regardless of which strategies are used for the connecting segments.
From a reliability modeling perspective, the communication availability of each segment can be calculated independently using the formulas derived in
Section 2.2. The overall corridor reliability then becomes the product of the availability values for all segments
where
is the availability of segment
, and
is the total number of segments in the corridor.
Special consideration must be given to the transitional zones where UAVs move from one segment to another, as communication availability in these zones depends on the overlap of coverage from stations in both segments, the reliability of the node station, and the UAV’s ability to successfully transition between frequencies.
Based on these considerations, a hierarchical approach to deploying communication infrastructure for non-linear corridors is recommended. This begins with critical node reinforcement using Strategy 4 at all corridor nodes, followed by segment classification based on length relative to repeater coverage radius, proximity to sensitive urban areas, expected traffic density, and environmental challenges to signal propagation. The appropriate deployment strategy can then be applied to each segment: Strategy 4 for highest-risk segments, Strategy 3 for moderate-risk segments, Strategy 2 for lower-risk segments, and Strategy 1 only for experimental or temporary deployments in minimal-risk areas. A comprehensive frequency allocation plan ensures adjacent stations operate on different frequencies, minimizes potential interference, and accommodates future corridor expansions.
The deployed radio stations serve not only for communication but also as navigation aids, like traditional aviation very high-frequency omnidirectional range (VOR) stations. This dual-purpose functionality enables UAVs to navigate by homing toward the signal from the next node station, determine their precise position through signal strength triangulation from multiple stations, and maintain position within corridor boundaries through signal strength thresholds. This radio-based navigation approach is particularly valuable in urban canyons where GPS signals may be unreliable due to multipath effects or signal blockage by buildings.
It is important to emphasize that the failure probabilities applied in the Markov chain analysis are configurable parameters introduced for the purpose of sensitivity evaluation and comparative robustness analysis. The model is not intended to reflect exact empirical failure rates, which may indeed be near zero in stable ground-based communication infrastructures. Instead, the objective is to examine the behavior of different repeater deployment strategies under rare but safety-critical degradation scenarios, including power outages, signal interference, cyber–physical disruptions, or long-term hardware aging. This approach is particularly relevant to the requirements of UAM and last-mile delivery UAV applications, where the maximum tolerable probability of catastrophic subsystem failure is often constrained to 10−9 per flight hour. By allowing the failure rate parameters to be adjusted, the proposed model remains applicable across a range of system reliability targets and regulatory compliance levels.
By extending the deployment strategies and reliability analysis to non-linear corridors, this approach provides a comprehensive framework for designing robust communication infrastructure that supports safe UAV operations in complex urban environments while maintaining optimal resource utilization.
3. Results
3.1. Resource Requirements for Different Repeater Deployment Strategies
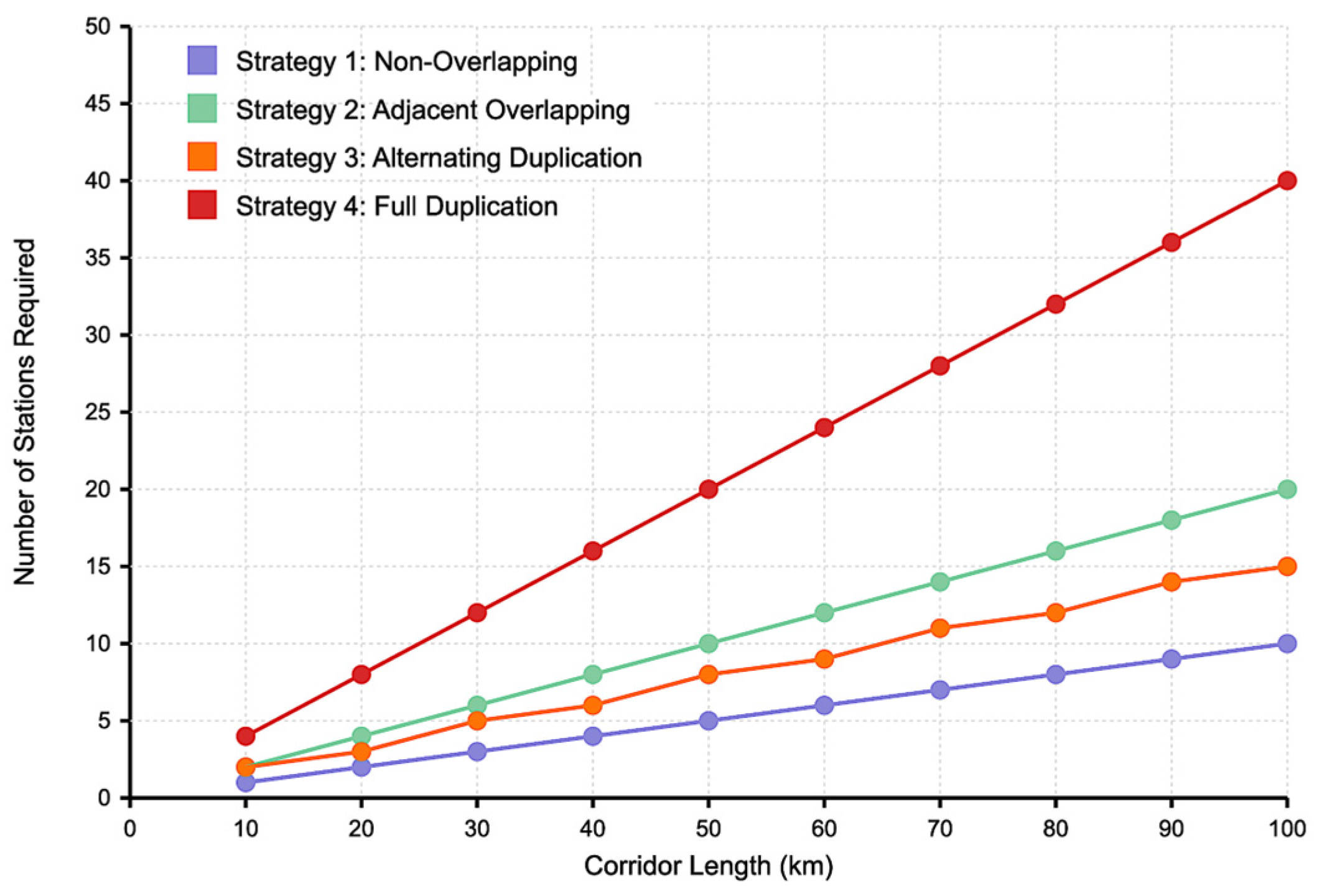
This subsection analyzes the resource demands of each of the four proposed strategies for radio station deployment along the UAV flight corridor. The key metric considered is the total number of radio repeater units required to ensure uninterrupted coverage, depending on the corridor length and coverage radius of each repeater. The analysis is based on the mathematical expressions derived earlier for each strategy in
Section 2.1.
Figure 11 illustrates the relationship between the corridor length and the number of radio stations required for each strategy, assuming a fixed coverage radius of
km.
As expected, the number of stations increases linearly with the corridor length for all strategies. However, the rate of increase varies significantly. Strategy 1 consistently requires the fewest stations. Strategy 2 approximately doubles the requirement due to full overlap. Strategy 3 falls between Strategies 2 and 4, offering a balance of redundancy and resource use. Strategy 4 results in the highest demand, doubling the number of physical units at each location.
This comparison highlights the trade-off between reliability and infrastructure cost, where more fault-tolerant strategies demand greater physical deployment.
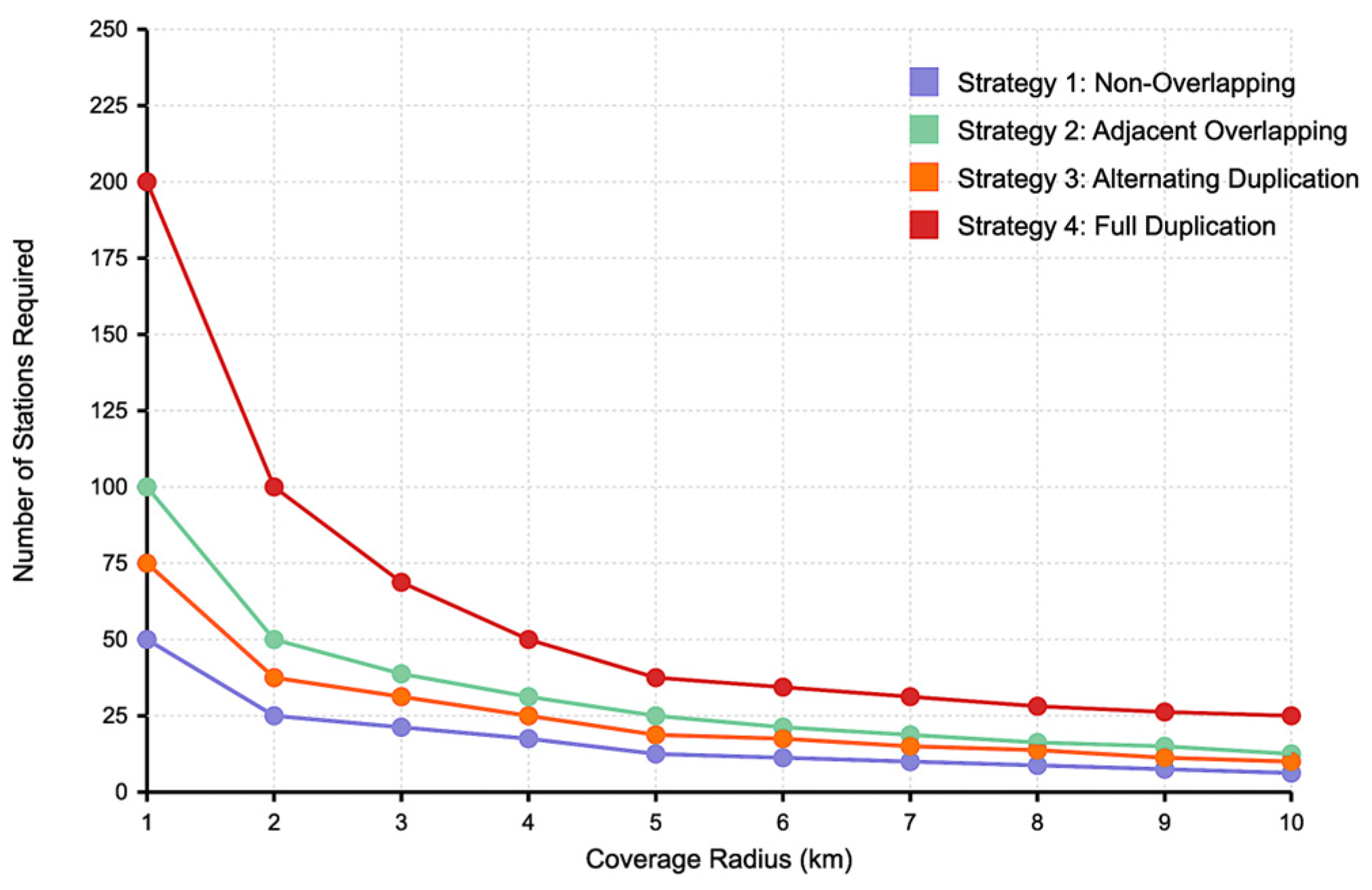
Figure 12 presents the relationship between the coverage radius and the number of stations required, assuming a fixed corridor length of
km.
As the coverage radius increases, the number of required stations decreases sharply across all strategies. The trend is particularly steep between km and km, after which the reduction becomes more gradual. Strategy 1 benefits most from an increased radius, requiring the fewest units overall. In contrast, Strategy 4 remains the most resource-intensive, even as increases.
These results emphasize the importance of optimizing repeater coverage radius during corridor design, as it significantly influences resource efficiency across all deployment strategies.
3.2. Communication Reliability Assessment Across Deployment Strategies
To evaluate the performance and reliability of the proposed UAV communication corridor, the theoretical Markov model introduced in
Section 2.2 is instantiated using practical deployment parameters. The values of λ and μ are selected based on realistic assumptions from telecommunications-grade outdoor repeater installations. For the simulations in this study,
is varied from
to
failures/hour and
from 0.01 to 0.1 repairs/hour. These reflect mean time to failure (MTTF) of 10,000–100,000 h and mean time to repair (MTTR) of 10–100 h, aligning with urban communication infrastructure performance.
This subsection evaluates the communication reliability of the four proposed deployment strategies in terms of channel unavailability
, which quantifies the probability that UAVs at a given point in the corridor are unable to establish a communication link due to station failure or channel overload. The analysis is based on the previously derived Markov models described in
Section 2.2.
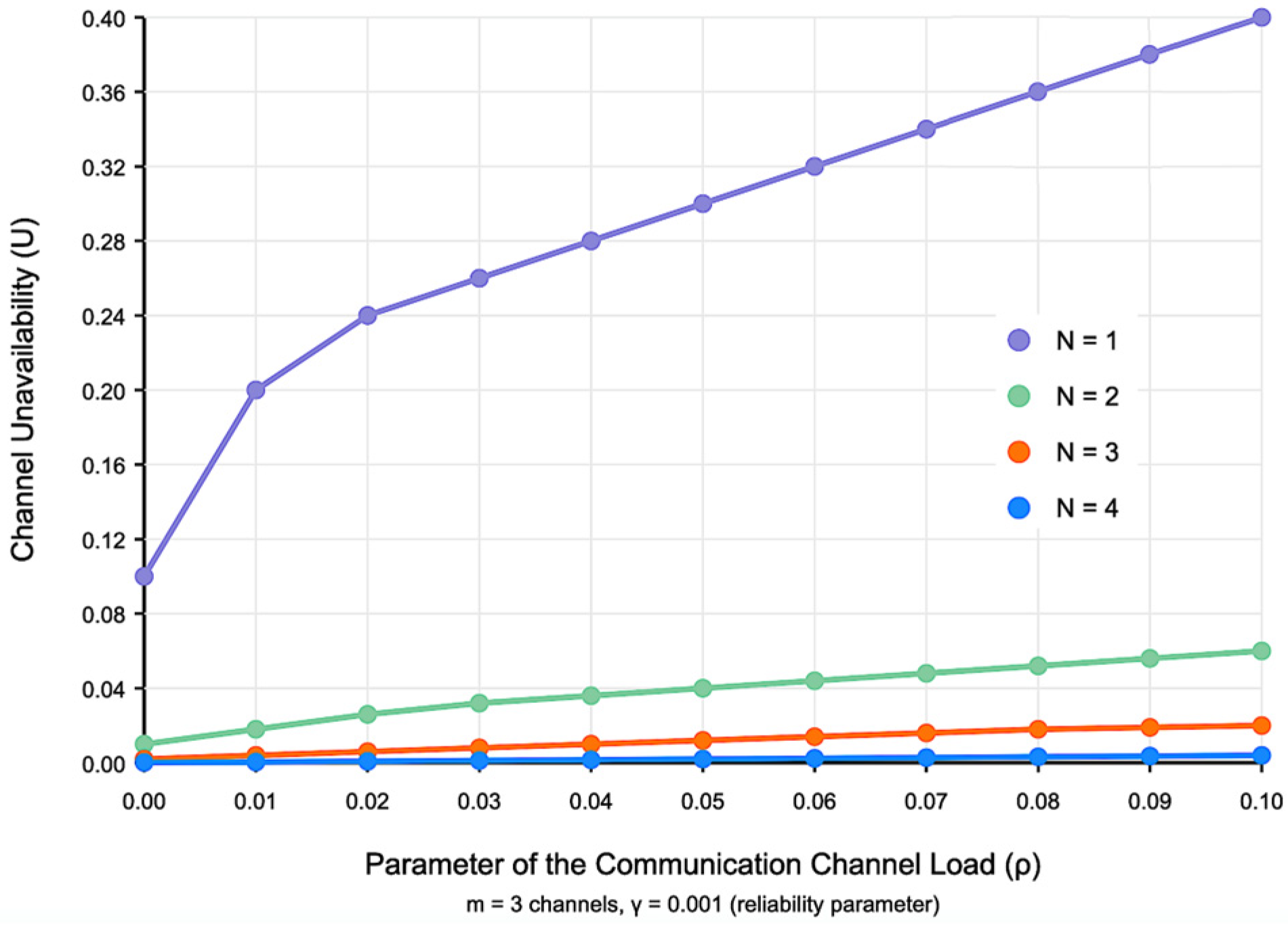
Figure 13 shows the unavailability,
, as a function of the channel load,
, for different strategies.
The results clearly demonstrate that increasing redundancy (higher ) significantly reduces channel unavailability. For example, when (Strategy 1), unavailability reaches over 35% at moderate load levels, when (Strategy 4), unavailability remains close to 0%, even at higher traffic loads. This confirms that strategies with greater redundancy offer substantial gains in communication reliability.
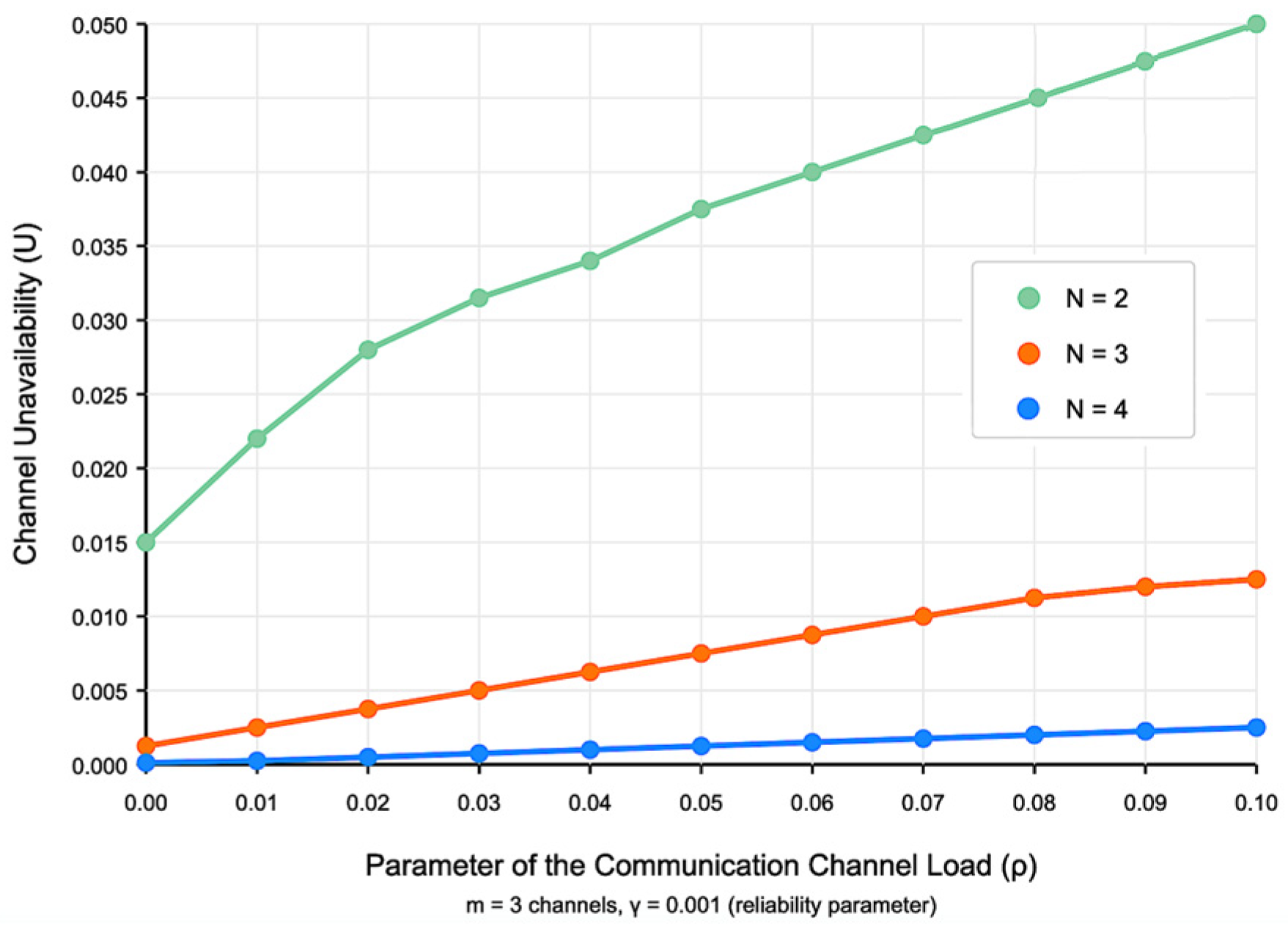
Figure 14 provides a closer look at the performance of Strategies 2 to 4, corresponding to over the same load range.
It is evident that Strategy 2 results in moderate unavailability (up to 5% at high load), Strategy 3 consistently maintains unavailability below 1%, and Strategy 4 provides very high availability across all traffic scenarios. These insights support the use of Strategy 3 or 4 in mission-critical applications where high reliability is essential.
3.3. Case Study: Hybrid UAV Corridor for Urban Air Mobility for Infrastructure Inspection and Security Monitoring in Astana’s Greenline District
As cities continue to evolve into smart, dynamic ecosystems, the demand for agile and responsive urban management tools becomes increasingly critical. Among these tools, UAM powered by UAVs is emerging as a transformative solution.
This case study explores how the communication strategies developed in this paper can be applied to the Greenline district in Astana (Kazakhstan) to support a hybrid UAV air corridor, combining different monitoring use cases.
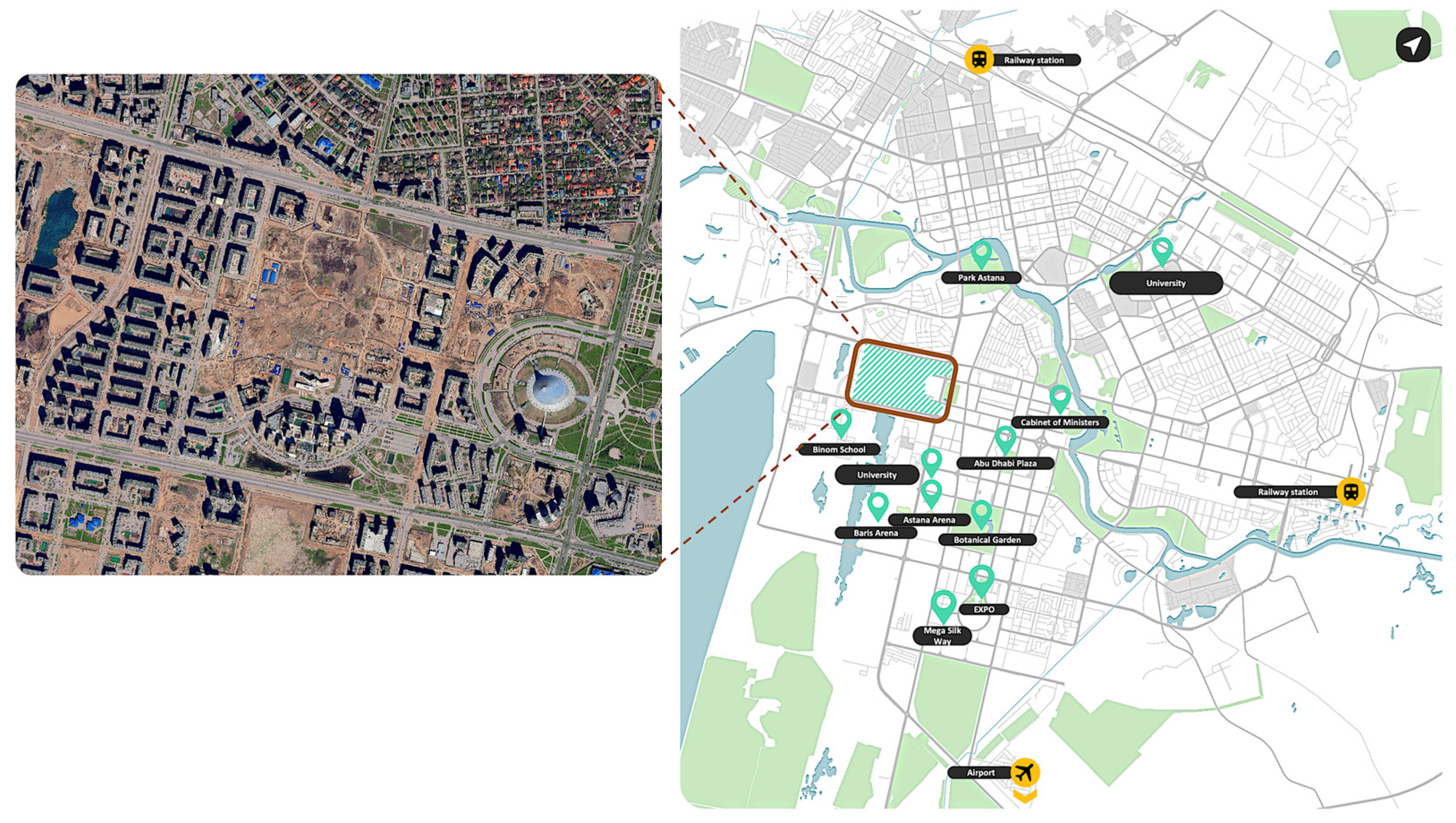
The Greenline development in Astana, Kazakhstan, represents a dynamic urban environment with a mix of residential, commercial, educational, and recreational infrastructure (
Figure 15). The district is currently undergoing intensive development, including transport planning, urban traffic modeling, and smart city initiatives. A key component of this transformation is the integration of UAV-based monitoring within the special urban air mobility corridors.
Urban infrastructure in dense districts like Greenline requires frequent monitoring to ensure operational safety. UAVs offer a fast, non-invasive alternative to traditional ground inspections. Integrated into the proposed communication corridor, UAVs can autonomously capture high-resolution and thermal imagery of rooftops, facades, lighting systems, and smart mobility sensors. Operations can be scheduled during off-peak hours and coordinated via Strategy 3, offering reliable connectivity for non-critical but data-rich missions.
Beyond inspection, UAVs enhance public safety through aerial monitoring of key sites such as Quantum STEM School, Green Mall, and Abu Dhabi Plaza. During public events or emergencies, UAVs equipped with real-time video streaming can support crowd management, anomaly detection, and rapid response coordination. These mission-critical tasks rely on Strategy 4 to maintain uninterrupted communication even under high load or partial system failure. UAVs’ unobtrusive presence, mobility, and AI-enhanced analytics make them ideal for real-time situational awareness.
These dual functions—inspection and security—are synergistic. A single UAV platform, managed via centralized scheduling and the same corridor infrastructure, can switch tasks throughout the day. This integration supports predictive maintenance, incident response, and enhanced service transparency, reducing costs while increasing responsiveness.
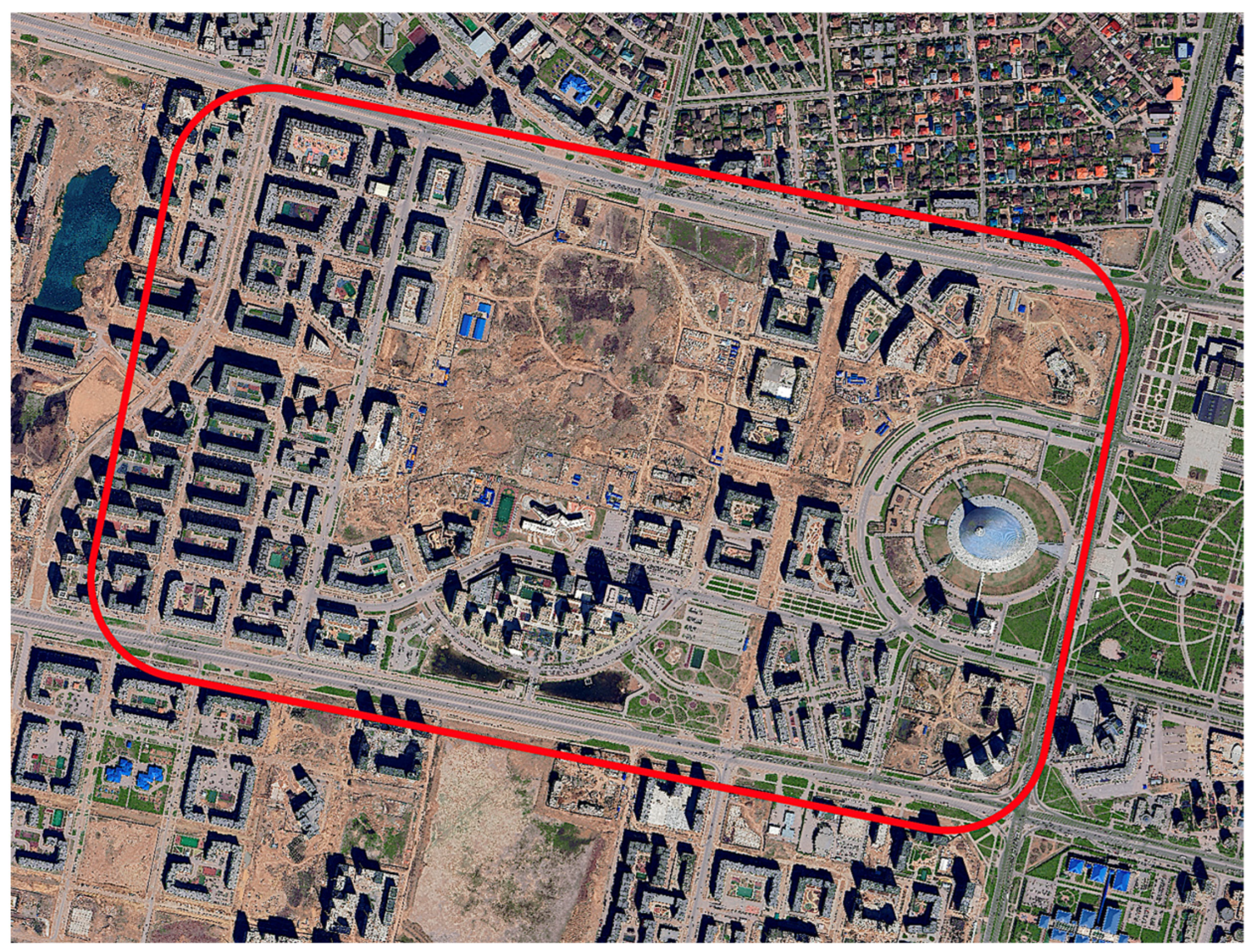
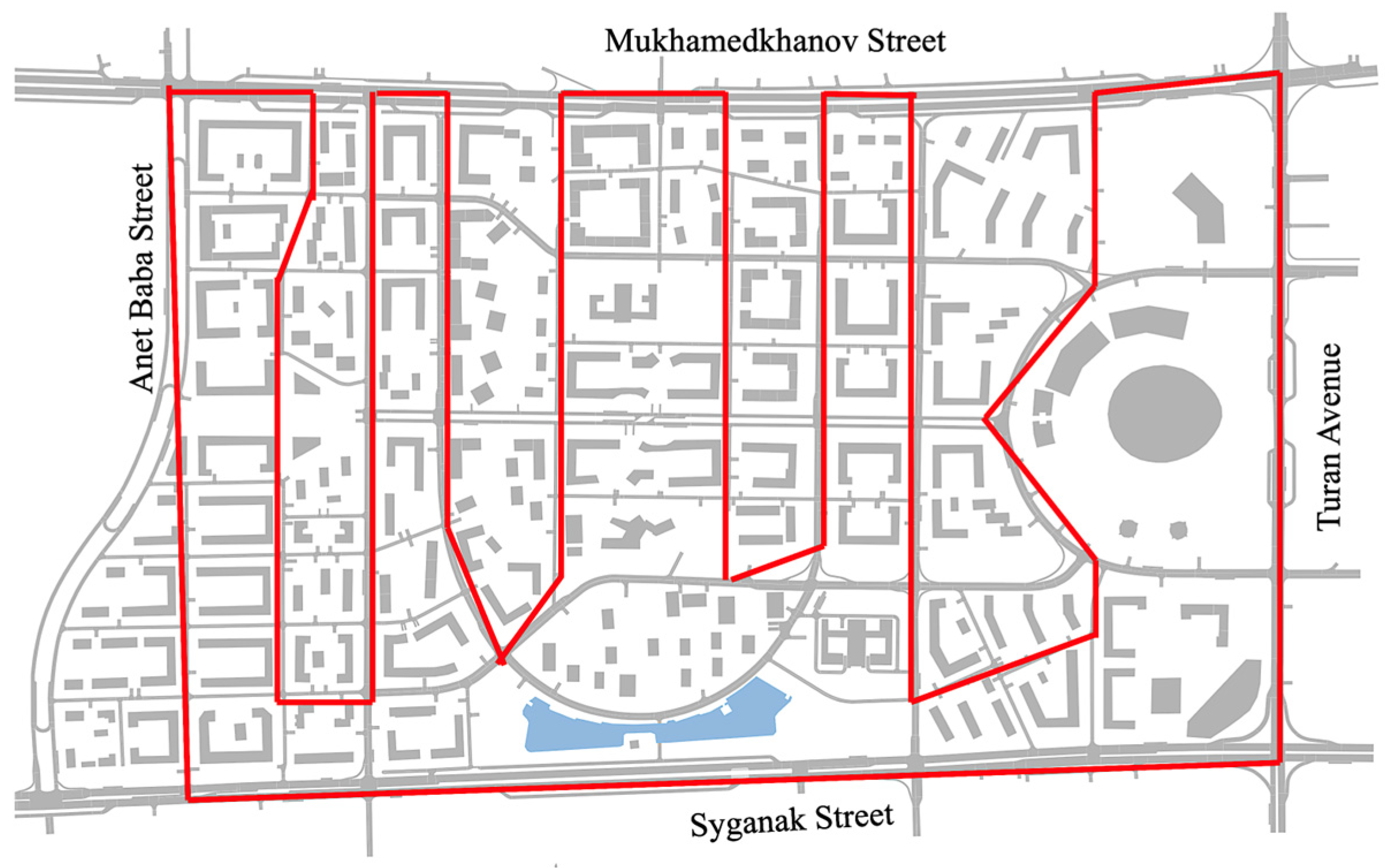
Astana’s Greenline district offers a suitable testbed for UAV corridor deployment. The area features dynamic traffic conditions, high-priority facilities, and prior UAV-based traffic data collection. A pilot loop along Turan Avenue, Syganak Street, Anet Baba Street, and Mukhamedkhanov Street—anchored by the Quantum STEM School—will support both infrastructure and security missions (
Figure 16). This deployment will demonstrate how a structured UAV communication network can enable scalable, dual-purpose aerial services as part of smart urban governance.
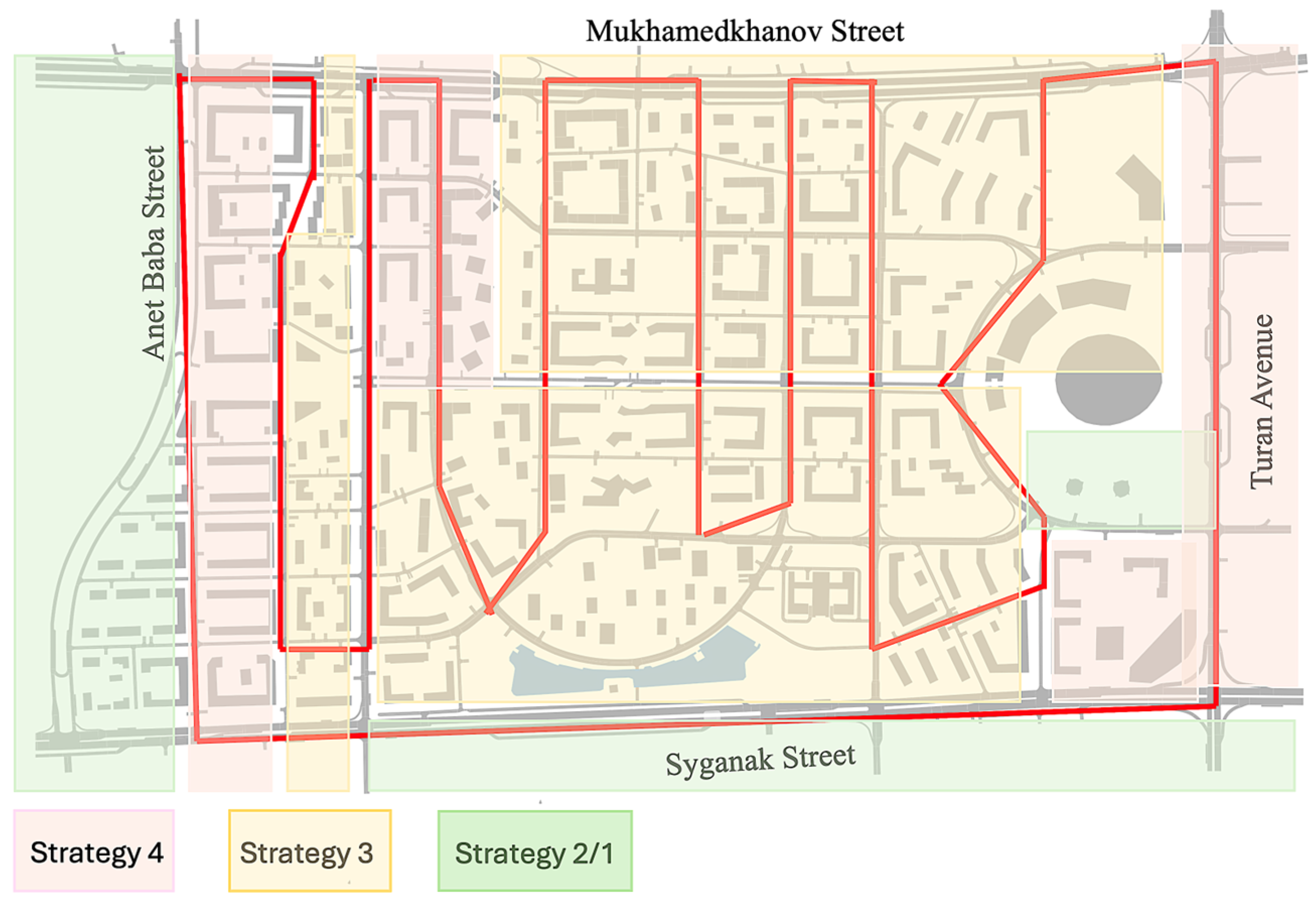
This area is broken down into segments based on use case priority and urban complexity, with each segment assigned a communication strategy according to its reliability needs (
Table 1).
This segmentation ensures a context-aware deployment, balancing communication reliability with infrastructure investment.
To ensure effective UAV operations within the Greenline air mobility corridor, it is essential to deploy drones that are optimized for urban conditions, such as narrow airspace, variable signal environments, and high-resolution sensing needs.
Table 2 demonstrates some commercially available UAV platforms that are well suited to infrastructure inspection and real-time security monitoring in cities like Astana.
Reliable communication is the backbone of any urban air mobility (UAM) corridor. In the context of the Greenline UAV deployment, repeater stations must ensure continuous, low-latency, and fault-tolerant links between UAVs and control systems—even in dense, signal-blocked environments.
Table 3 demonstrates some commercial-grade systems that provide flexible deployment options (fixed or drone-mounted) and support redundant, secure, and scalable mesh networking.
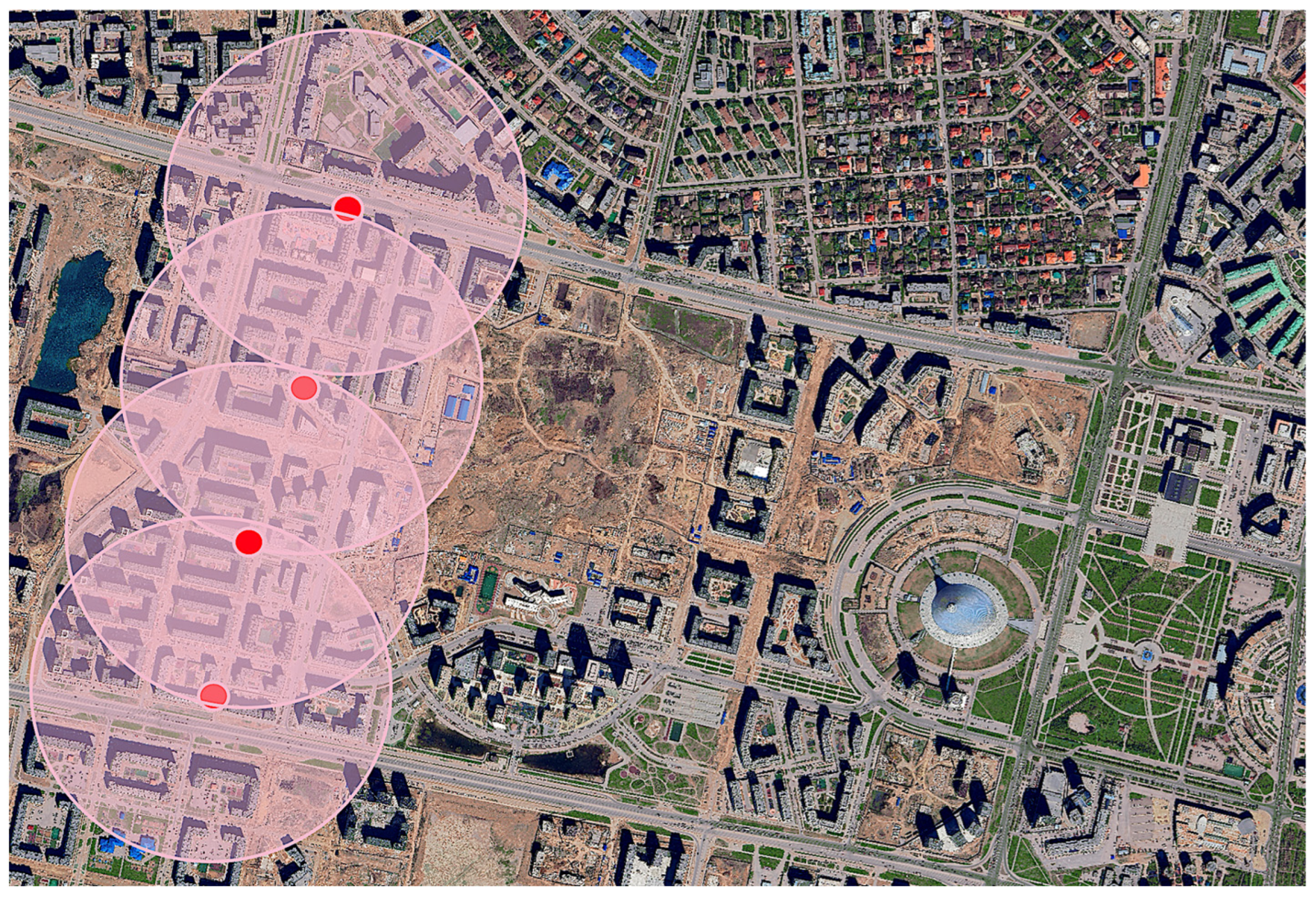
The implementation of the UAV communication corridor in the Greenline district is supported by spatial analysis and scenario modeling that highlight its feasibility and utility.
Figure 17 presents a GIS-based overview of the district’s built environment, showing building density and transport layout—key inputs for corridor route planning. The selected route aligns with major arterial roads and service zones, maximizing coverage and minimizing conflicts with existing infrastructure.
Flight path segmentation and task allocation along the corridor are illustrated in
Figure 18. Each segment is designated for specific UAV operations—such as infrastructure inspection, public safety monitoring, or logistics support—based on proximity to key urban assets. This zoning enables load balancing across the corridor and supports prioritization of mission-critical flights.
To assess network resilience,
Figure 19 compares corridor performance under different repeater deployment strategies. The results confirm that Strategy 4 offers the highest operational continuity, particularly in segments with dense vertical obstructions or critical security needs. For lower-risk zones or scheduled data collection, Strategy 3 remains sufficient and more cost-efficient.
One of the practical applications of the UAV corridor system is illustrated in
Figure 20, which captures real-time traffic monitoring at the intersection of Mukhamedkhanov Street and Anet Baba Street. This area is part of a designated UAV corridor that runs along a major urban artery and has been equipped with communication infrastructure based on Strategy 4 deployment.
In this example, aerial data were collected using UAVs flying along the corridor, capturing vehicle speed and density at high resolution. The figure displays real-time velocity indicators for each vehicle, showing speeds in kilometers per hour as the UAV travels along the corridor path.
This implementation demonstrates how urban UAV corridors can not only serve aerial monitoring and inspection tasks but also actively contribute to smart urban planning through real-time sensing and data integration.
4. Discussion
4.1. Comparative Analysis of Communication Availability in the Air Mobility Corridor
A key performance criterion for reliable UAV operation within an air mobility corridor is the availability, , of the communication service at every point along the flight path. To evaluate this, we analyze the channel unavailability, , across all four proposed deployment strategies, which correspond to different levels of redundancy.
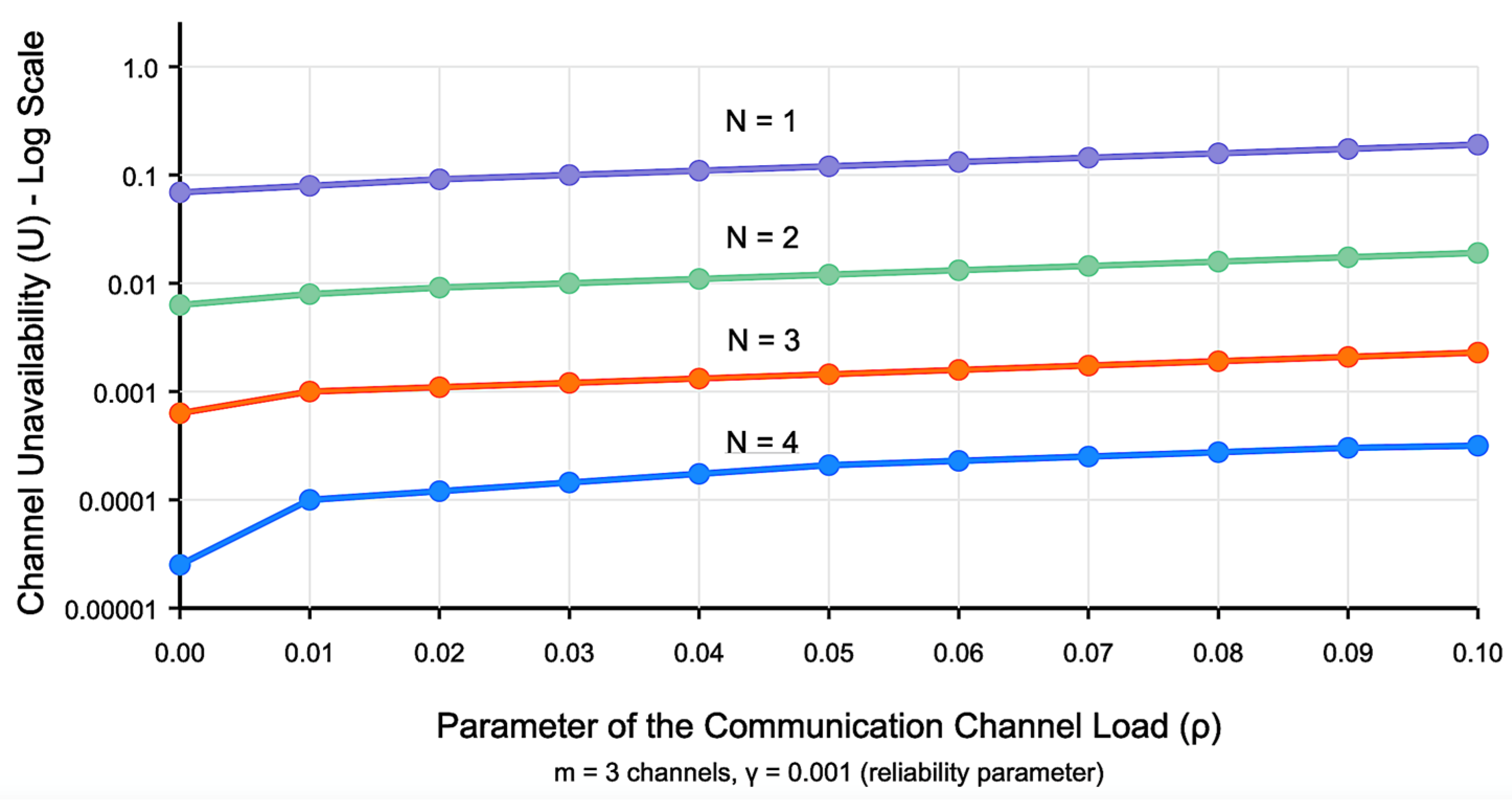
The results of this comparative analysis are presented in
Figure 21, which shows unavailability as a function of the communication channel load parameter,
, using a logarithmic scale.
This figure reveals a systematic exponential improvement in reliability as redundancy increases. Specifically, the following patterns are observed.
With N=1 (non-redundant deployment), unavailability ranges between 10% and 35%, depending on the traffic load. This level is inadequate for any application requiring consistent or safe UAV operation.
Increasing to N = 2 already brings about a 10-fold reduction in unavailability, making the system moderately reliable but still sensitive to congestion under high load conditions.
For N = 3, the system achieves high reliability with unavailability values in the order of , corresponding to 99.9% availability at low loads and 99.5% at higher loads—suitable for demanding UAV missions.
Finally, N = 4 achieves unavailability below , approaching “five nines” reliability. This makes it a strong candidate for mission-critical or autonomous UAV operations where service disruption is unacceptable.
The near-linear behavior in the logarithmic domain highlights an important engineering insight. Each additional radio station at a point of coverage provides approximately one order of magnitude improvement in communication availability.
This principle is instrumental for system designers when balancing between infrastructure costs and reliability requirements. While Strategy 4 offers the best performance, Strategy 3 may be optimal in many cases, offering excellent reliability with significantly lower resource demands.
4.2. Resource-Reliability Trade-Off for UAV Communication Strategies
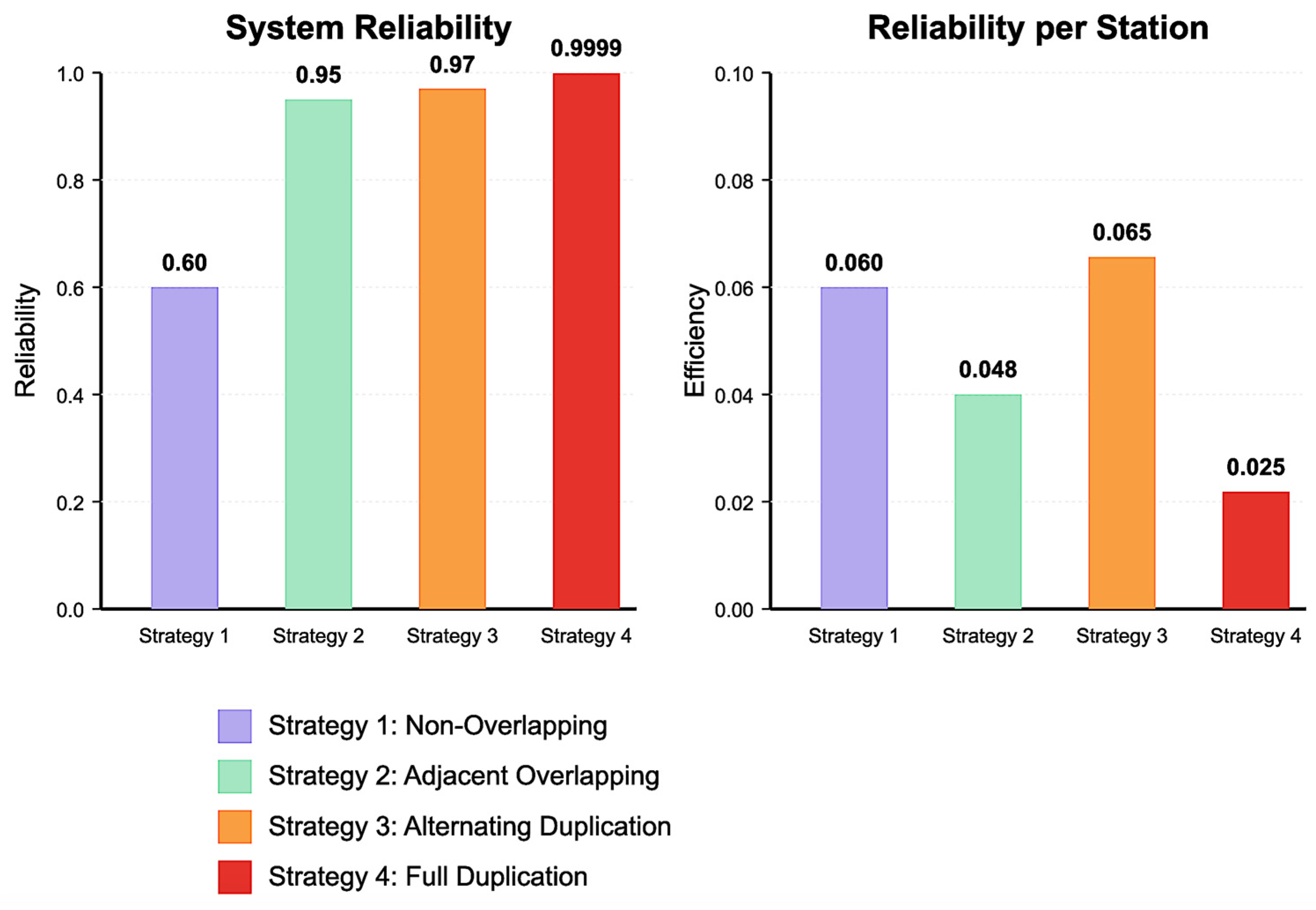
The evaluation of different UAV communication strategies reveals a fundamental trade-off between system reliability and resource efficiency, as illustrated in
Figure 22. This trade-off represents one of the key considerations when designing air mobility corridors with the appropriate level of communication redundancy.
As shown in the left panel of
Figure 22, the overall system reliability (
) increases substantially when moving from Strategy 1 to Strategy 2, with more modest improvements when advancing to Strategy 3 and Strategy 4. However, these reliability gains come at varying resource costs, with Strategy 4 requiring four times the infrastructure of Strategy 1.
The right panel of the
Figure 22 reveals a more nuanced perspective by examining resource efficiency. The efficiency is calculated by dividing the system reliability (
) by the number of stations required for each strategy.
Here, Strategy 3 emerges as the most efficient (0.065), followed closely by Strategy 1 (0.060), while Strategy 4 shows the lowest efficiency (0.025) despite its superior absolute reliability. This indicates that Strategy 3, with its alternating duplication approach, optimizes the balance between reliability and resource utilization.
These findings suggest that the selection of an appropriate communication strategy should be context dependent. For critical UAV operations where safety is paramount and resource constraints are secondary (such as emergency medical transport), Strategy 4 near-perfect reliability may justify its higher resource requirements. Conversely, for commercial applications with moderate reliability requirements but significant cost sensitivity, Strategy 3 offers the most favorable balance. In resource-limited environments or for non-critical operations, Strategy 1 might provide a minimally acceptable reliability level while conserving infrastructure.
The relationship between communication load and these efficiency metrics further complicates the selection process, as higher loads tend to reduce the relative advantages of more complex strategies. System designers must, therefore, consider not only the current communication demands but also anticipated future traffic increases when selecting the optimal strategy for long-term deployment.
To systematically explore how redundancy levels can be optimized through sensitivity analysis, this section examines the parametric relationships between key system parameters and the effectiveness of different deployment strategies. The analysis focuses on identifying optimal redundancy configurations under varying operational conditions and constraints.
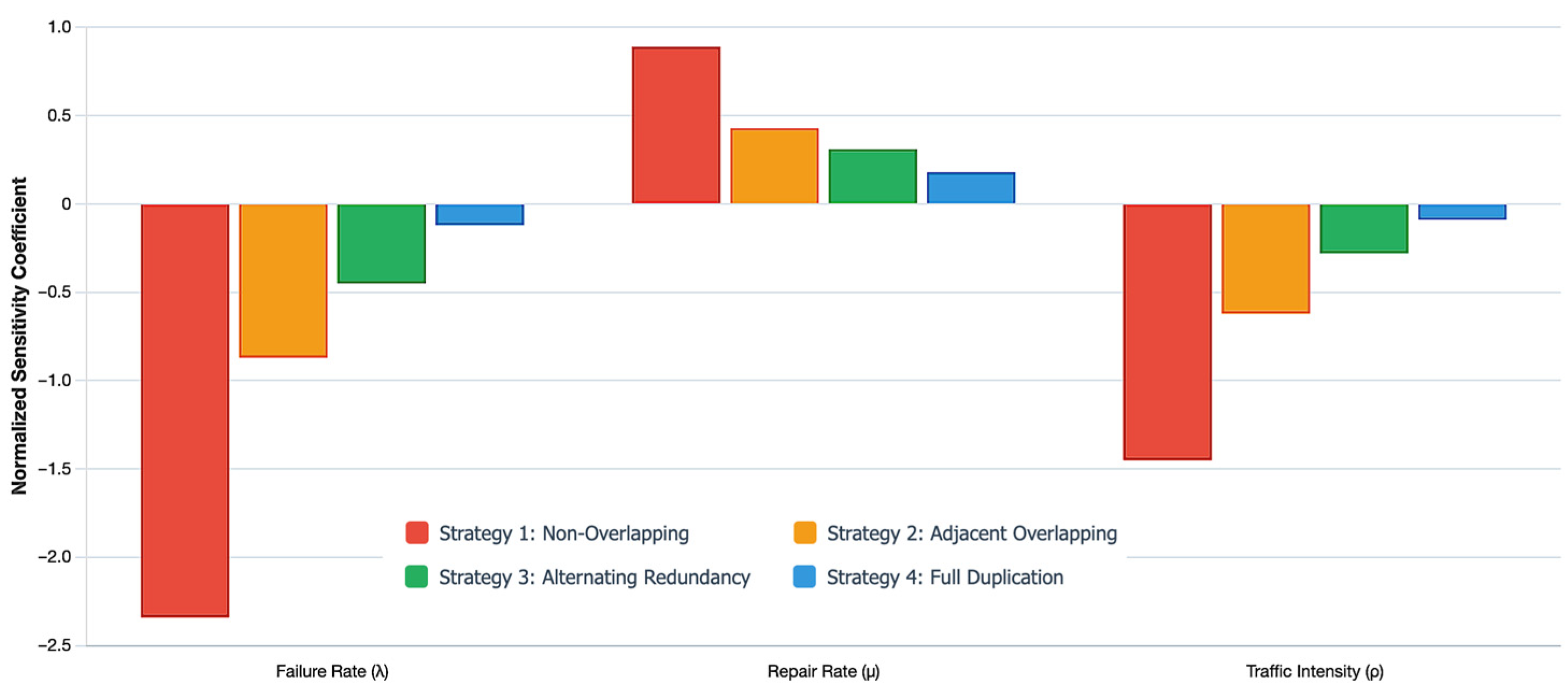
The sensitivity of system availability,
, to key parameters is quantified using normalized partial derivatives with respect to the failure rate,
, the repair rate,
, and the traffic intensity,
. For each deployment strategy,
, the sensitivity coefficients are defined as follows:
This normalized form allows the direct comparison of sensitivity across parameters with different units and magnitudes.
Figure 23 illustrates the sensitivity analysis results for the four deployment strategies, showing how system availability responds to a 10% variation in each parameter. Strategy 1 exhibits the highest sensitivity to failure rate changes
, indicating that single-station coverage is highly vulnerable to equipment failures. Strategy 2 demonstrates reduced sensitivity
, showing the stabilizing effect of dual redundancy. Strategy 3 achieves balanced sensitivity across all parameters
, suggesting robust performance under parameter variations. Strategy 4 exhibits the lowest failure rate sensitivity of
, but it offers only marginal improvements over Strategy 3.
Redundancy optimization involves balancing multiple competing objectives: maximizing availability, minimizing infrastructure costs, and maintaining operational efficiency. A multi-objective optimization framework is formulated as follows:
: maximize availability.
: minimize cost.
: maximize performance margin.
These are subject to the following:
where
is the redundancy configuration vector (e.g., number of stations or level of overlap),
is system availability,
is the total infrastructure cost,
is the traffic intensity at which availability drops below the required threshold, and
and
are availability and cost constraints, respectively.
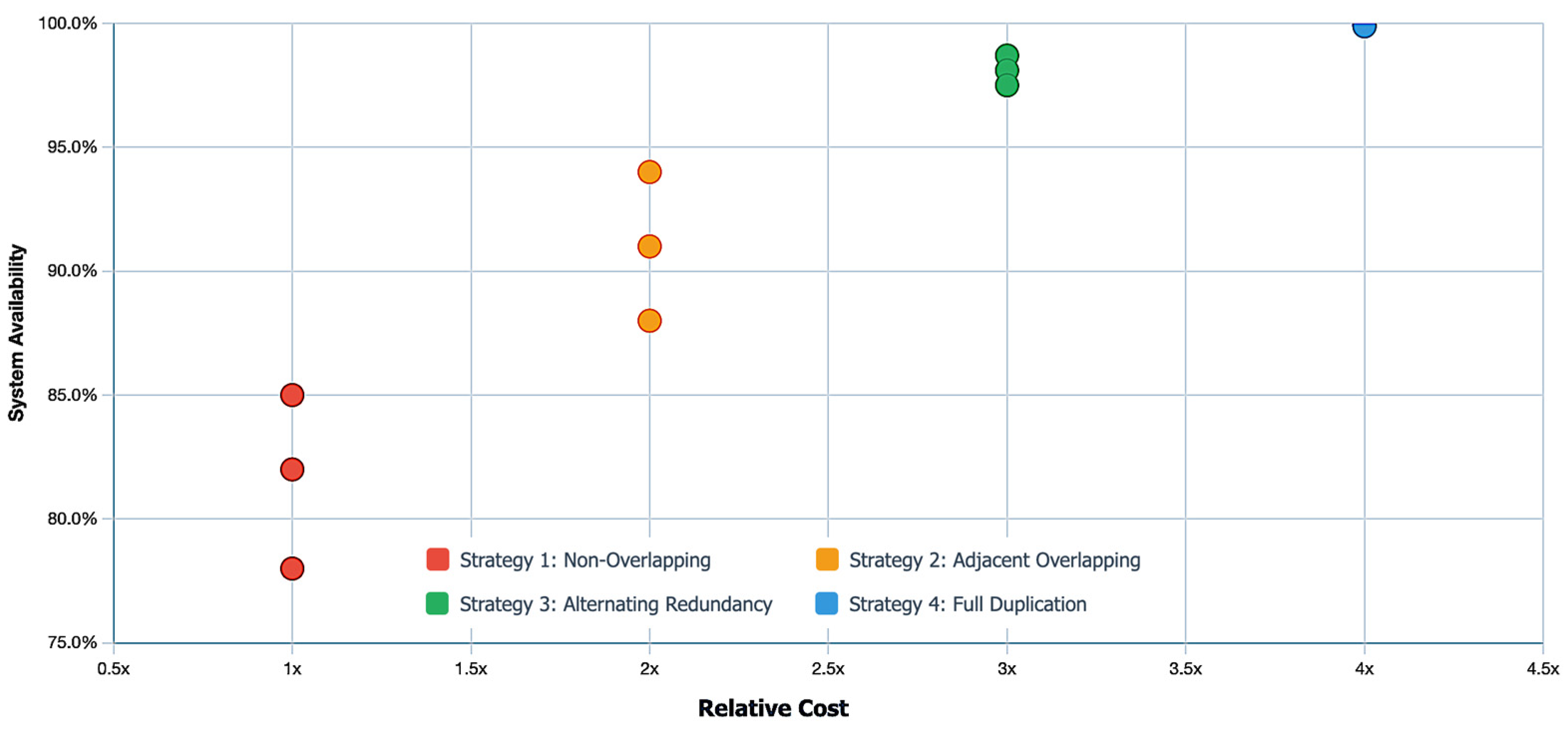
Pareto frontier analysis (
Figure 24) reveals that Strategy 3 consistently lies on the efficient frontier across a wide range of cost-availability trade-off scenarios. For availability requirements between 99.5% and 99.9%, Strategy 3 provides the best cost-effectiveness. Strategy 4 becomes optimal only when availability requirements exceed 99.95% or when traffic intensity
. Strategy 2 represents a compromise for moderate reliability demands (95–99%) under strict budget constraints.
This comprehensive sensitivity analysis framework empowers system designers to make informed decisions about redundancy configurations, based on specific operational goals, infrastructure budgets, and uncertainty margins—ultimately achieving an optimal balance between reliability and resource efficiency throughout the system lifecycle.
4.3. Step-by-Step Procedure for Designing Communication Infrastructure for Reliable UAV Operations in Air Corridors
The design of a robust communication infrastructure is a critical enabler for safe and efficient UAV operations in UAM corridors. This section outlines a step-by-step methodology developed in this study for the selection, placement, and reliability assessment of radio repeater stations within structured air corridors. The methodology supports both linear and non-linear corridor geometries and is adaptable to different operational and environmental conditions.
Step 1. Corridor definition and segmentation.
The first step involves defining the overall geometry and extent of the UAV corridor. In realistic urban environments, corridors often follow segmented or broken-line paths due to terrain, airspace restrictions, or infrastructure layouts. Therefore, the total corridor length,
, is divided into smaller segments,
, such that
Each segment, , is treated independently in the subsequent design process, allowing for differentiated strategies, depending on the segment’s characteristics, such as UAV traffic density, risk level, or physical constraints.
Step 2. Assign repeater stations to corridor nodes.
All directional changes, bends, or nodes along the UAV corridor must first be identified, as these points are critical for maintaining reliable communication and navigational clarity. At each of these nodes, at least one radio repeater station should be installed to ensure uninterrupted signal coverage and seamless transitions between corridor segments. To prevent signal interference and facilitate accurate navigation, each node and its adjoining segment should be treated as an independent communication unit, with appropriate frequency separation assigned between adjacent stations.
Step 3. Selection of repeater deployment strategy.
For each corridor segment, a suitable deployment strategy is selected from among the four predefined architectures:
Strategy 1—non-overlapping coverage: minimum resource use; no redundancy.
Strategy 2—fully overlapping coverage: adjacent station zones overlap; dual redundancy.
Strategy 3—alternating redundancy: every second station is duplicated; balanced reliability.
Strategy 4—full duplication with overlap: all stations are duplicated; highest reliability.
The selection is guided by the segment’s required availability level, criticality of UAV operations, and environmental or regulatory factors.
Step 4. Radio repeater placement and frequency assignment.
Within each segment, the selected strategy determines the number and spacing of radio repeater stations. Placement is carried out using the appropriate geometric layout (e.g., spacing equal to , , or less, depending on the coverage radius and strategy type).
In corridors with directional changes, repeaters are also placed at each bend or navigation node, and alternating operating frequencies are assigned to adjacent repeaters. This follows the principle of non-directional radio beacon navigation used in manned aviation, ensuring clear handoffs and minimal interference during UAV transitions between corridor segments.
Step 5. Estimation of resource requirements.
The total number of repeater units required per segment is calculated based on the coverage radius and the selected deployment architecture. For strategies with internal duplication (Strategies 3 and 4), this includes both primary and redundant units at specific or all repeater locations.
The overall infrastructure requirement for the entire corridor is obtained by summing the resource needs across all segments.
Step 6. Reliability modeling and availability estimation.
For each segment, the availability of the communication service is modeled using continuous-time Markov chains, accounting with general Formula (11) and selected deployment strategy.
Step 7. Comparative evaluation and optimization.
The final stage of the methodology involves comparing the strategies in terms of the following:
Infrastructure efficiency (number of stations);
Achieved communication availability;
Suitability for different corridor segments.
This allows decision-makers to select the most appropriate configuration for each segment based on reliability goals and resource constraints. Optionally, the methodology supports iterative refinement through simulation and sensitivity analysis.
Step 8. Validate the corridor design.
The final step involves validating the designed UAV corridor through simulation and testing. UAV traffic patterns and repeater station performance should be simulated under the modeled conditions to assess system behavior and reliability. Signal coverage must then be evaluated using radio propagation models; where possible, field trials should be conducted to confirm performance in real-world conditions. Lastly, the calculated communication availability metrics should be verified against the defined operational requirements to ensure that the corridor meets the intended reliability and safety standards.
This structured approach enables scalable, cost-effective, and high-reliability communication infrastructure design for UAV operations across diverse corridor types. It ensures consistent service availability through segment-specific strategy selection and engineering-driven placement of repeater stations.
4.4. Limitations and Challenges of the Study
While this study provides a structured and comparative evaluation of communication strategies for UAV operations in air mobility corridors, several limitations and challenges must be acknowledged. These factors highlight areas where further research and refinement are needed to fully translate the findings into real-world deployments.
All strategies assume identical repeater performance characteristics, such as coverage radius, failure rates, and repair times. In practice, these parameters may vary due to hardware diversity, installation conditions, or power supply differences, introducing heterogeneity that could alter availability outcomes.
The Markov models rely on a stationary (steady state) Poisson arrival process and exponential service times. However, UAV communication demand may vary dynamically with time, mission type, and traffic density. These non-stationary effects are not captured in the current framework and may influence short-term availability fluctuations.
The reliability models assume that repeater station failures and repairs are statistically independent. Environmental disruptions (e.g., power outages and weather events) or coordinated cyberattacks could affect multiple stations simultaneously, reducing the effectiveness of spatial redundancy.
While the number of required repeater units is used as a proxy for infrastructure cost, the study does not incorporate installation, maintenance, energy consumption, or operational costs. A full techno-economic assessment would be necessary for decision-making in real-world projects.
These limitations do not diminish the value of the findings but instead underscore the need for a multi-disciplinary, iterative approach to corridor design.
4.5. Adjustment Principles and Technical Challenges in Hybrid Deployment Strategies
In the context of hybrid deployment strategies—where different communication architectures are selectively applied across UAV corridor segments—it is essential to consider both adjustment principles and the technical challenges that arise during implementation. These hybrid strategies are designed to align communication infrastructure with the operational demands and environmental characteristics of each segment. However, their success depends on carefully calibrated deployment logic and technical coordination mechanisms.
Several key principles guide the adjustment of hybrid strategies. First, mission criticality is a primary factor. Segments designated for high-risk or high-priority operations—such as emergency response, crowd monitoring, or navigation over sensitive infrastructure—should adopt high-redundancy configurations (e.g., full duplication with overlap, as in Strategy 4). Conversely, for low-risk inspection zones or routine data collection, resource-efficient strategies (e.g., Strategy 1 or 2) may suffice. Second, the physical characteristics of the corridor must be evaluated, particularly in dense urban settings with tall structures and signal-blocking obstacles. In such environments, overlapping coverage or localized duplication is essential to mitigate line-of-sight limitations.
Temporal variations in UAV traffic intensity also influence strategy selection. During peak operation periods—such as scheduled deliveries, public events, or emergency response scenarios—corridor segments may require temporary upgrades to more robust configurations. This can be achieved through the deployment of mobile or drone-mounted repeaters. Additionally, infrastructure availability plays a role. In segments where power supply, maintenance access, or network backhaul is limited, strategies with fewer components may be favored despite reduced redundancy.
Regulatory and spectrum-related constraints must also be considered. Frequency assignment for adjacent repeater zones must adhere to national spectrum policies, particularly in urban areas with high electromagnetic density. Interference avoidance becomes a design constraint that shapes the practical implementation of overlapping coverage zones.
The implementation of hybrid strategies introduces several technical challenges. One of the most critical is ensuring seamless handover between segments with different redundancy levels. UAVs transitioning from highly redundant to minimally redundant areas must maintain connectivity without triggering safety warnings or experiencing signal loss. This requires precise synchronization of coverage zones and consistent handoff protocols.
Interoperability between repeater types is another challenge. Hybrid systems often involve a mix of fixed, pole-mounted, and mobile repeaters, which must operate under a unified control architecture. Without consistent coordination and time synchronization, such heterogeneity can lead to coverage gaps or signal collisions. Furthermore, real-time monitoring of network status is essential to detect degradation and trigger reconfiguration where necessary. This calls for a robust monitoring system capable of segment-level diagnostics and centralized control logic.
Testing and validation of hybrid strategies also become more complex. Simulations and field tests must account for partial failures, interference, and dynamic traffic loads to ensure corridor resilience under real-world conditions. Digital twins of the UAV corridor can be employed to simulate these scenarios, optimize strategy selection, and guide predictive maintenance and reconfiguration.
While hybrid deployment strategies offer a flexible and efficient approach to UAV corridor design, their implementation requires clear operational principles, advanced monitoring capabilities, and solutions to ensure interoperability, scalability, and regulatory compliance in complex environments.
4.6. Future Directions of Research
The results of this study provide a framework for designing and evaluating radio communication strategies within UAV air mobility corridors. However, to further the operational impact of these findings, several avenues for future research are proposed.
Future work should extend beyond linear corridor models to incorporate realistic 2D and 3D geometries, including altitude layering, turns, intersections, and no-fly zones. Integration with high-resolution urban terrain and building data will enable more accurate simulations of signal propagation, shadowing effects, and radio visibility.
While the current study considers static configurations, future research could explore adaptive strategies that respond to real-time UAV traffic load, environmental conditions, or failure states. Techniques such as dynamic power adjustment, mobile repeater deployment (e.g., via ground vehicles or drones), and AI-based network optimization can significantly improve both efficiency and resilience.
Security threats such as jamming, spoofing, or cyberattacks targeting radio infrastructure pose serious risks to UAV operations. Future models should incorporate adversarial failure modes and analyze the robustness of different deployment strategies under intentional disruption scenarios.
Future work should incorporate detailed cost modeling, including installation, maintenance, energy use, and lifecycle considerations. Multi-objective optimization techniques can be used to find cost-effective configurations that meet target reliability thresholds under budget, space, and regulatory constraints.
To bridge the gap between theoretical modeling and operational deployment, future research should focus on implementing pilot systems or digital twins for corridor segments. Empirical data collection on communication performance, interference, and system behavior under failure conditions will be crucial for model calibration and refinement.
5. Conclusions
This study introduced a systematic framework for designing reliable communication infrastructure to support UAV operations within structured UAM corridors. Recognizing the necessity of uninterrupted and redundant communication links for safe and coordinated UAV missions, four distinct deployment strategies for radio repeater stations were analyzed. Continuous-time Markov models were used to quantify communication availability and unavailability under varying traffic loads and station failure conditions.
The analysis confirmed that increased redundancy, achieved through overlapping coverage and station duplication, substantially enhances communication reliability. Strategy 4, featuring complete duplication with full overlap, achieved near-perfect availability, while Strategy 3, based on alternating redundancy, demonstrated an optimal balance between infrastructure investment and performance. This makes Strategy 3 particularly suitable for urban applications that require high reliability with constrained resources.
A practical application of the proposed framework was demonstrated through a case study in the Greenline district of Astana, Kazakhstan. The study area featured a hybrid UAV air corridor designed to support both infrastructure inspection and public safety monitoring. The zoning of the corridor into segments with differentiated reliability requirements enabled the effective allocation of communication resources. The deployment also integrated commercial-grade UAV platforms and repeater technologies, emphasizing the feasibility of real-world implementation.
In addition to performance modeling and strategy assessment, a structured design methodology was outlined, suitable for both linear and non-linear air corridor geometries. This methodology facilitates adaptive deployment planning, taking into account urban complexity, environmental conditions, and operational priorities.
The findings provide a foundational basis for developing scalable, resilient, and context-aware communication systems that not only enable safe UAV operations but also support smart city functions. Further research is recommended to incorporate dynamic traffic behavior, heterogeneous communication technologies, and large-scale experimental validation for enhanced applicability.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}