
Neural Network-Based Path Planning for Fixed-Wing UAVs with Constraints on Terminal Roll Angle



Abstract
1. Introduction
- Neural Network Planner for Fixed-Wing UAVs: We develop a neural-network-based path planner capable of generating feasible flight trajectories in real time. The neural network is trained offline and rapidly predicts trajectories, thus eliminating the need for iterative online optimization.
- Incorporation of Terminal Roll-Angle Constraints: Our approach explicitly incorporates terminal roll-angle constraints into the path-planning process. Unlike previous approaches that may overlook terminal attitude constraints, our method ensures that UAVs reliably attain the desired roll angle upon arrival at the target location.
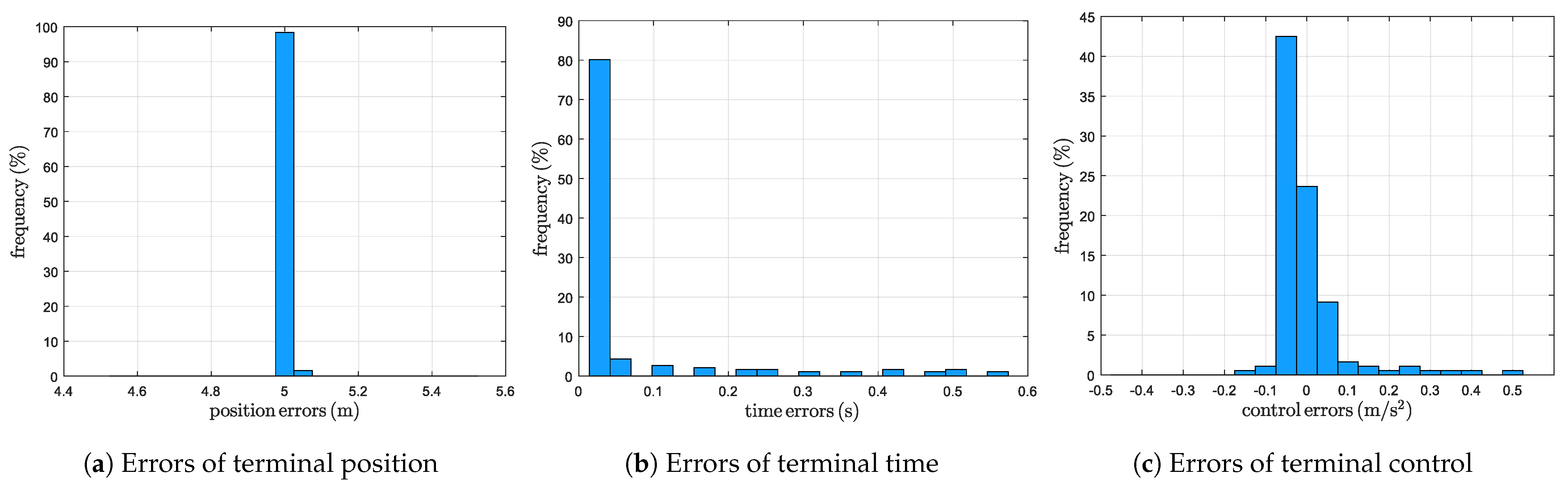
- Robust Performance Validation: The proposed method has been validated through extensive Monte Carlo simulations involving thousands of randomized initial conditions. Simulation results demonstrate that the neural network-based planner consistently produces feasible and accurate trajectories, satisfying terminal roll constraints in all tested scenarios. The results demonstrate the robustness and reliability of the proposed framework for real-time fixed-wing UAV path planning.
2. Problem Formulation
2.1. Kinematics
2.2. Optimal Control Problem
3. Characterization of Optimal Solutions
3.1. Necessary Conditions for Optimality
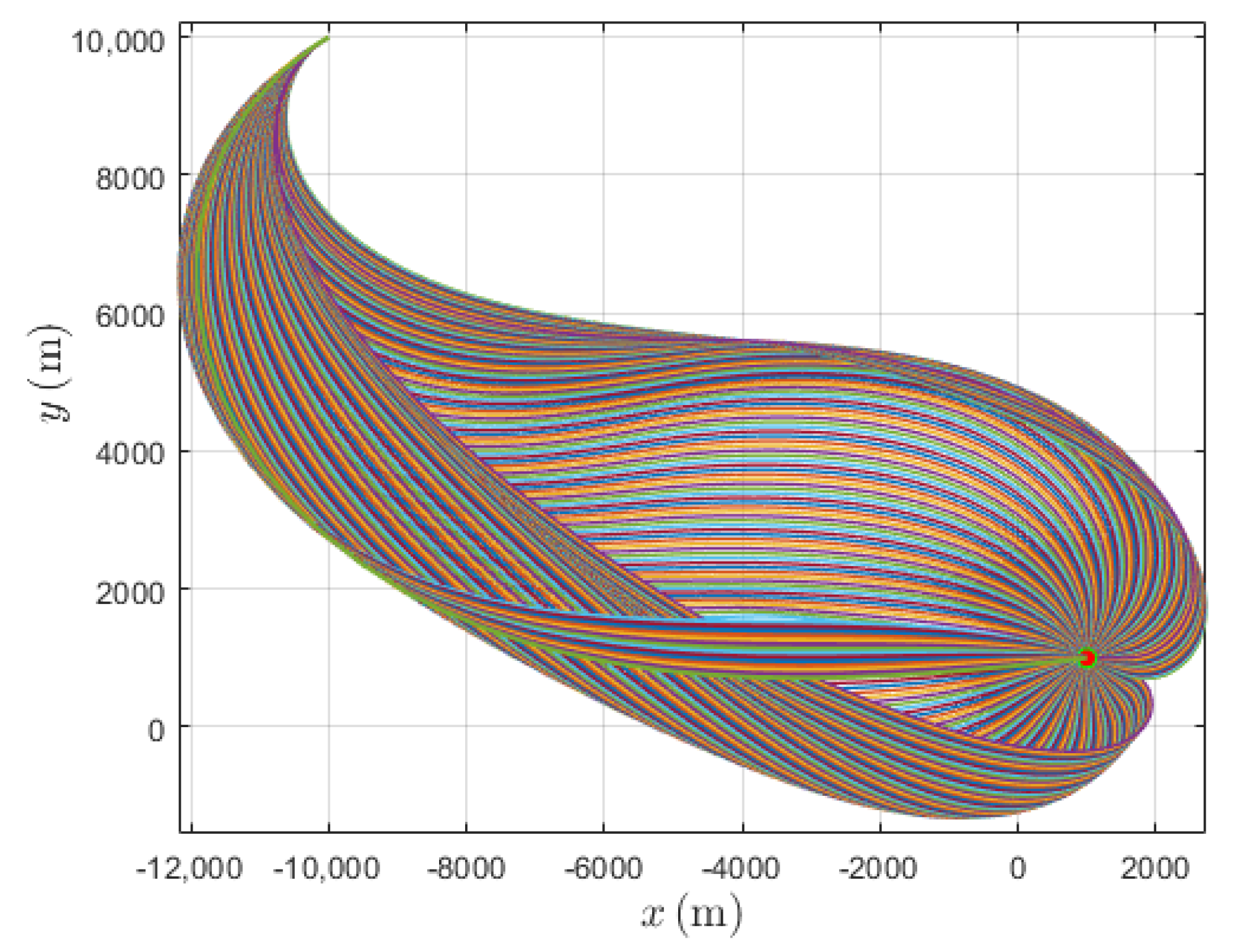
3.2. Parameterization of Extremal Trajectories
4. Real-Time Solutions via Neural Networks
4.1. Scheme for Real-Time Solution via Neural Network
4.2. Dataset Generation for Training Neural Network
| Algorithm 1 Dataset Generation Procedure |
Input: Positive values , T, and step size Output: Dataset for
to step do for to step do for to step do Set Integrate the system using Equation (13) with the parameter Extract the trajectory and control for if for then Add to dataset end if end for end for end for Return
|
5. Numerical Simulations
5.1. Comparisons with Optimization Methods
5.2. Monte Carlo Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Malamiri, H.R.G.; Aliabad, F.A.; Shojaei, S.; Morad, M.; Band, S.S. A study on the use of UAV images to improve the separation accuracy of agricultural land areas. Comput. Electron. Agric. 2021, 184, 106079. [Google Scholar] [CrossRef]
- Darbari, V.; Gupta, S.; Verma, O.P. Dynamic motion planning for aerial surveillance on a fixed-wing UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 488–497. [Google Scholar]
- Anand, T.P.; Abishek, K.; Kailash, R.K.; Nithiyanantham, K. Development and automation of fixed wing UAV for reconnaissance mission with FPV capability. INCAS Bull. 2022, 14, 111–118. [Google Scholar] [CrossRef]
- Sujit, P.; Saripalli, S.; Sousa, J.B. Unmanned aerial vehicle path following: A survey and analysis of algorithms for fixed-wing unmanned aerial vehicless. IEEE Control Syst. Mag. 2014, 34, 42–59. [Google Scholar]
- Ghambari, S.; Golabi, M.; Jourdan, L.; Lepagnot, J.; Idoumghar, L. UAV path planning techniques: A survey. RAIRO-Oper. Res. 2024, 58, 2951–2989. [Google Scholar] [CrossRef]
- Chen, P.; Zhang, G.; Li, J.; Chang, Z.; Yan, Q. Path-following control of small fixed-wing UAVs under wind disturbance. Drones 2023, 7, 253. [Google Scholar] [CrossRef]
- Cui, Z.; Wang, Y. Nonlinear adaptive line-of-sight path following control of unmanned aerial vehicles considering sideslip amendment and system constraints. Math. Probl. Eng. 2020, 2020, 4535698. [Google Scholar] [CrossRef]
- Qi, W.; Tong, M.; Wang, Q.; Song, W.; Ying, H. Curved-line path-following control of fixed-wing unmanned aerial vehicles using a robust disturbance-estimator-based predictive control approach. Appl. Sci. 2023, 13, 11577. [Google Scholar] [CrossRef]
- Nelson, D.R.; Barber, D.B.; McLain, T.W.; Beard, R.W. Vector field path following for miniature air vehicles. IEEE Trans. Robot. 2007, 23, 519–529. [Google Scholar] [CrossRef]
- Wilhelm, J.P.; Clem, G. Vector field UAV guidance for path following and obstacle avoidance with minimal deviation. J. Guid. Control Dyn. 2019, 42, 1848–1856. [Google Scholar] [CrossRef]
- Medeiros, F.L.L.; Da Silva, J.D.S. A Dijkstra algorithm for fixed-wing UAV motion planning based on terrain elevation. In Proceedings of the Advances in Artificial Intelligence–SBIA 2010: 20th Brazilian Symposium on Artificial Intelligence, São Bernardo do Campo, Brazil, October 23–28, 2010; Proceedings 20; Springer: Berlin/Heidelberg, Germany, 2010; pp. 213–222. [Google Scholar]
- Babel, L. Curvature-constrained traveling salesman tours for aerial surveillance in scenarios with obstacles. Eur. J. Oper. Res. 2017, 262, 335–346. [Google Scholar] [CrossRef]
- Yang, K.; Sukkarieh, S. Real-time continuous curvature path planning of UAVs in cluttered environments. In Proceedings of the 2008 5th International Symposium on Mechatronics and Its Applications, Amman, Jordan, 27–29 May 2008; pp. 1–6. [Google Scholar]
- Lee, D.; Shim, D.H. RRT-based path planning for fixed-wing UAVs with arrival time and approach direction constraints. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 317–328. [Google Scholar]
- Xu, J.; Shi, M.; Tang, F.; Sun, X.; Yue, J.; Lin, B.; Qin, K. Dubins-A*: A new global path planning scheme for fixed-wing UAV with irregular obstacles avoidance. In Proceedings of the 2024 7th International Conference on Electronics Technology (ICET), Chengdu, China, 17–20 May 2024; pp. 636–641. [Google Scholar]
- Airlangga, G. Advancing UAV path planning system: A software pattern language for dynamic environments. Bul. Ilm. Sarj. Tek. Elektro 2023, 5, 475–497. [Google Scholar] [CrossRef]
- Arifianto, O.; Farhood, M. Optimal control of fixed-wing uavs along real-time trajectories. In Proceedings of the Dynamic Systems and Control Conference; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 45295, pp. 205–214. [Google Scholar]
- Din, A.F.U.; Mir, I.; Gul, F.; Mir, S.; Alhady, S.S.N.; Al Nasar, M.R.; Alkhazaleh, H.A.; Abualigah, L. Robust flight control system design of a fixed wing UAV using optimal dynamic programming. Soft Comput. 2023, 27, 3053–3064. [Google Scholar] [CrossRef]
- De Marinis, A.; Iavernaro, F.; Mazzia, F. A minimum-time obstacle-avoidance path planning algorithm for unmanned aerial vehicles. Numer. Alg. 2022, 89, 1639–1661. [Google Scholar] [CrossRef]
- Forkan, M.; Rizvi, M.M.; Chowdhury, M.A.M. Optimal path planning of Unmanned Aerial Vehicles (UAVs) for targets touring: Geometric and arc parameterization approaches. PLoS ONE 2022, 17, e0276105. [Google Scholar] [CrossRef]
- Na, Y.; Li, Y.; Chen, D.; Yao, Y.; Li, T.; Liu, H.; Wang, K. Optimal energy consumption path planning for unmanned aerial vehicles based on improved particle swarm optimization. Sustainability 2023, 15, 12101. [Google Scholar] [CrossRef]
- Ryu, S.K.; Moncton, M.; Choi, H.L.; Frew, E. Path planning in 3D with motion primitives for wind energy-harvesting fixed-wing aircraft. arXiv 2023, arXiv:2311.10915. [Google Scholar]
- Techy, L.; Woolsey, C.A. Minimum-time path planning for unmanned aerial vehicles in steady uniform winds. J. Guid. Control Dyn. 2009, 32, 1736–1746. [Google Scholar] [CrossRef]
- Horn, J.F.; Schmidt, E.M.; Geiger, B.R.; DeAngelo, M.P. Neural network-based trajectory optimization for unmanned aerial vehicles. J. Guid. Control Dyn. 2012, 35, 548–562. [Google Scholar] [CrossRef]
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP algorithm for large-scale constrained optimization. SIAM Rev. 2005, 47, 99–131. [Google Scholar] [CrossRef]
- Phillips, T.; Stölzle, M.; Turricelli, E.; Achermann, F.; Lawrance, N.; Siegwart, R.; Chung, J.J. Learn to path: Using neural networks to predict Dubins path characteristics for aerial vehicles in wind. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 1073–1079. [Google Scholar]
- Airlangga, G.; Bata, J.; Nugroho, O.I.A.; Sugianto, L.F. Neural network architectures for UAV path planning: A comparative study with A* algorithm as benchmark. Int. J. Robot. Control Syst. 2025, 5, 625–639. [Google Scholar] [CrossRef]
- Dong, R.; Pan, X.; Wang, T.; Chen, G. UAV path planning based on deep reinforcement learning. In Artificial Intelligence for Robotics and Autonomous Systems Applications; Springer: Berlin/Heidelberg, Germany, 2023; pp. 27–65. [Google Scholar]
- Li, J.; Liu, Y. Deep reinforcement learning based adaptive real-time path planning for UAV. In Proceedings of the 2021 8th International Conference on Dependable Systems and Their Applications (DSA), Yinchuan, China, 11–12 September 2021; pp. 522–530. [Google Scholar]
- Babel, L. Online flight path planning with flight time constraints for fixed-wing UAVs in dynamic environments. Int. J. Intell. Unmanned Syst. 2022, 10, 416–443. [Google Scholar] [CrossRef]
- Ji, X.; Wang, T. Energy minimization for fixed-wing UAV assisted full-duplex relaying with bank angle constraint. IEEE Wirel. Commun. Lett. 2023, 12, 1199–1203. [Google Scholar] [CrossRef]
- Betts, J.T. Survey of numerical methods for trajectory optimization. J. Guid. Control Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Roberts, S.; Shipman, J. Continuation in shooting methods for two-point boundary value problems. J. Math. Anal. Appl. 1967, 18, 45–58. [Google Scholar] [CrossRef]
- Guelman, M.; Shinar, J. Optimal guidance law in the plane. J. Guid. Control Dyn. 1984, 7, 471–476. [Google Scholar] [CrossRef]
- Chen, Z.; Shima, T. Nonlinear optimal guidance for intercepting a stationary target. J. Guid. Control Dyn. 2019, 42, 2418–2431. [Google Scholar] [CrossRef]
- Wang, K.; Chen, Z.; Wang, H.; Li, J.; Shao, X. Nonlinear optimal guidance for intercepting stationary targets with impact-time constraints. J. Guid. Control Dyn. 2022, 45, 1614–1626. [Google Scholar] [CrossRef]
- Wu, F.; Chen, Z.; Shao, X.; Wang, K. Nonlinear optimal guidance with constraints on impact time and impact angle. arXiv 2024, arXiv:2406.04707. [Google Scholar]
- Zou, F.; Li, J.; Niu, Y. Time-coordinated path following for multiple agile fixed-wing UAVs with end-roll expectations. Guid. Navig. Control 2023, 3, 2350020. [Google Scholar] [CrossRef]
- Chen, Z.; Caillau, J.B.; Chitour, Y. L1-minimization for mechanical systems. SIAM J. Control Optim. 2016, 54, 1245–1265. [Google Scholar] [CrossRef]
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robot. 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Conditions | Control Effort () | ||||||
|---|---|---|---|---|---|---|---|
| UAV | (km) | (km) | (m/s) | (°) | |||
| #1 | 250 | ||||||
| #2 | 3 | 6 | 250 | ||||
| #3 | 10 | 8 | 250 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Q.; Wu, F.; Chen, Z. Neural Network-Based Path Planning for Fixed-Wing UAVs with Constraints on Terminal Roll Angle. Drones 2025, 9, 378. https://doi.org/10.3390/drones9050378
Xu Q, Wu F, Chen Z. Neural Network-Based Path Planning for Fixed-Wing UAVs with Constraints on Terminal Roll Angle. Drones. 2025; 9(5):378. https://doi.org/10.3390/drones9050378
Chicago/Turabian StyleXu, Qian, Fanchen Wu, and Zheng Chen. 2025. "Neural Network-Based Path Planning for Fixed-Wing UAVs with Constraints on Terminal Roll Angle" Drones 9, no. 5: 378. https://doi.org/10.3390/drones9050378
APA StyleXu, Q., Wu, F., & Chen, Z. (2025). Neural Network-Based Path Planning for Fixed-Wing UAVs with Constraints on Terminal Roll Angle. Drones, 9(5), 378. https://doi.org/10.3390/drones9050378