1. Introduction
The Advanced Aerial Mobility (AAM) concept envisions a significant expansion in how aviation impacts daily life. This includes short-range passenger transportation around major metropolitan areas using electrified vertical takeoff and landing air taxis, the regional transportation of people and cargo via electrified aircraft, and the widespread use of small drones for urban deliveries [
1]. Due to their small size, relatively slow flight speeds compared to wind speeds, and light wing loading, which amplifies turbulence effects [
2], drones are more susceptible to flow features in the urban environment than heavier, faster-moving, manned aircraft [
3]. Therefore, small fixed-wing drones are the focus of the current work. Many technological challenges must be overcome before vast quantities of drones are deployed in urban areas [
4]. However, the economic appeal of improving logistics and efficiency in last-mile deliveries is strong [
5]. To some extent, this future is already here: major companies have recently navigated technical and regulatory challenges within the United States to meet the growing demands of e-commerce. They are using drones for small parcel deliveries in limited suburban areas [
6], marking an early step in the road map toward widespread drone delivery in major cities worldwide.
Urban environments present unique challenges, characterized by complex wind patterns resulting from buildings and varying terrain, which result in rapid changes in wind velocity and direction, which are especially impactful for drone platforms [
7]. Safe vehicle-operating envelopes are often explored using flight dynamics simulation frameworks, designed to understand vehicle dynamics and control system responses. In simulation environments, it is common to specify turbulence intensity using von Kármán or Dryden models, as per the guidance in military specifications and civil aviation standards such as Refs. [
8,
9], respectively. Spectral turbulence model intensity (
) scales, as a function of altitude based on atmospheric model expectations, and length scale (
L) values are recommended, which further modify the impact of turbulence on the drone. Favorable comparison data are available to show that such atmospheric models replicate the turbulence seen in open-air environments, such as the data presented in Ref. [
10]. However, many key assumptions of common Dryden and von Kármán models are violated within urban environments, in which large structures strongly influence the flow [
11].
Within the roughness zone near structures, turbulent airflow impacts a drones’s navigational accuracy and creates demands on its flight control system to reject these disturbances [
12]. Understanding how delivery drones interact with these dynamic wind conditions is essential for ensuring safe and efficient operations. The research community has developed atmospheric models using computational means; for example, Galeway et al. [
13] used a Reynolds Average Navier–Stokes (RANS) approach to capture the urban wind effects. The atmospheric modeling community has moved more recently towards using higher-fidelity approaches, such as Large-Eddy Simulation (LES) for urban wind models, which offer more accurate and reliable results [
14,
15].
There are few studies in which realistic urban turbulence is coupled with a dynamic model of a drone navigating a cityscape. One example is the work by Mohamed et al. [
16], using a two-dimensional frozen turbulent field (i.e., no temporal variation). Another example is provided by the work of Galway et al. [
13], in which the authors rely on a preexisting aerodynamic model of the Aerosonde platform. A comprehensive simulation environment is outlined by Cybyk et al. [
17], which has many of the same features as the simulation environment demonstrated herein.
This work expands the scope of previous studies in many ways. We developed a comprehensive urban wind model for a notional cityscape using high-fidelity LES CFD and represent the time- and spatially varying winds for several separate inflow azimuth cases. We present wind data for each case, including the turbulent kinetic energy (TKE) atmospheric metric for the resulting wind fields. For comparison, we also present a case in which the city is absent, based on the same precursor flow simulation used to generate an atmospheric boundary layer profile at the inflow condition. Next, we coupled an efficient aerodynamic solver capable of accommodating arbitrary fixed-wing drone platforms by simply specifying the geometric and mass properties. For flight control, we utilized the open-source Ardupilot software version 4.5.5, the most common flight control software on drone platforms. The vehicle model and control architecture enable the rapid deployment of a wide range of configurations and facilitate the efficient computation of their response in complex, time-varying urban winds. After establishing the preliminaries, we used our simulation environment to study the flight performance of a representative delivery drone in realistic urban wind fields. To fully sample the urban wind field, the drone navigates patterns shaped like a wagon wheel, centered at points distributed throughout the city.
The impact of the urban environment on the drone’s response is investigated in terms of the maximum g-load imposed on the vehicle, and flight dynamic characteristics are explored. In this context, g-loading serves as a quantitative measure of the aerodynamic disturbances and control demands imposed on the airframe. The response in the urban environment is compared to the LES wind field without buildings present and to a case where the traditional von Kármán model is utilized, with von Kármán turbulence intensity scaled to the simulated inflow and higher scaling parameters representing light and medium turbulence from applicable military specifications. The vehicle impacts in the realistic LES winds around the cityscape are significantly more pronounced than those in the flat terrain LES model or any of the von Kármán comparison cases. Finally, we associate the location of the maximum vehicle impact in the domain with the location in which the TKE metric exhibits abrupt transitions. Evaluating the stability of drone platforms is essential—particularly for delivery drones, where the center of gravity can vary significantly depending on the payload configuration—and remains a critical factor in achieving robust and reliable platform designs [
18]. The proposed framework supports this evaluation, enabling the systematic assessment of platform response under complex urban wind conditions.
2. Materials and Methods
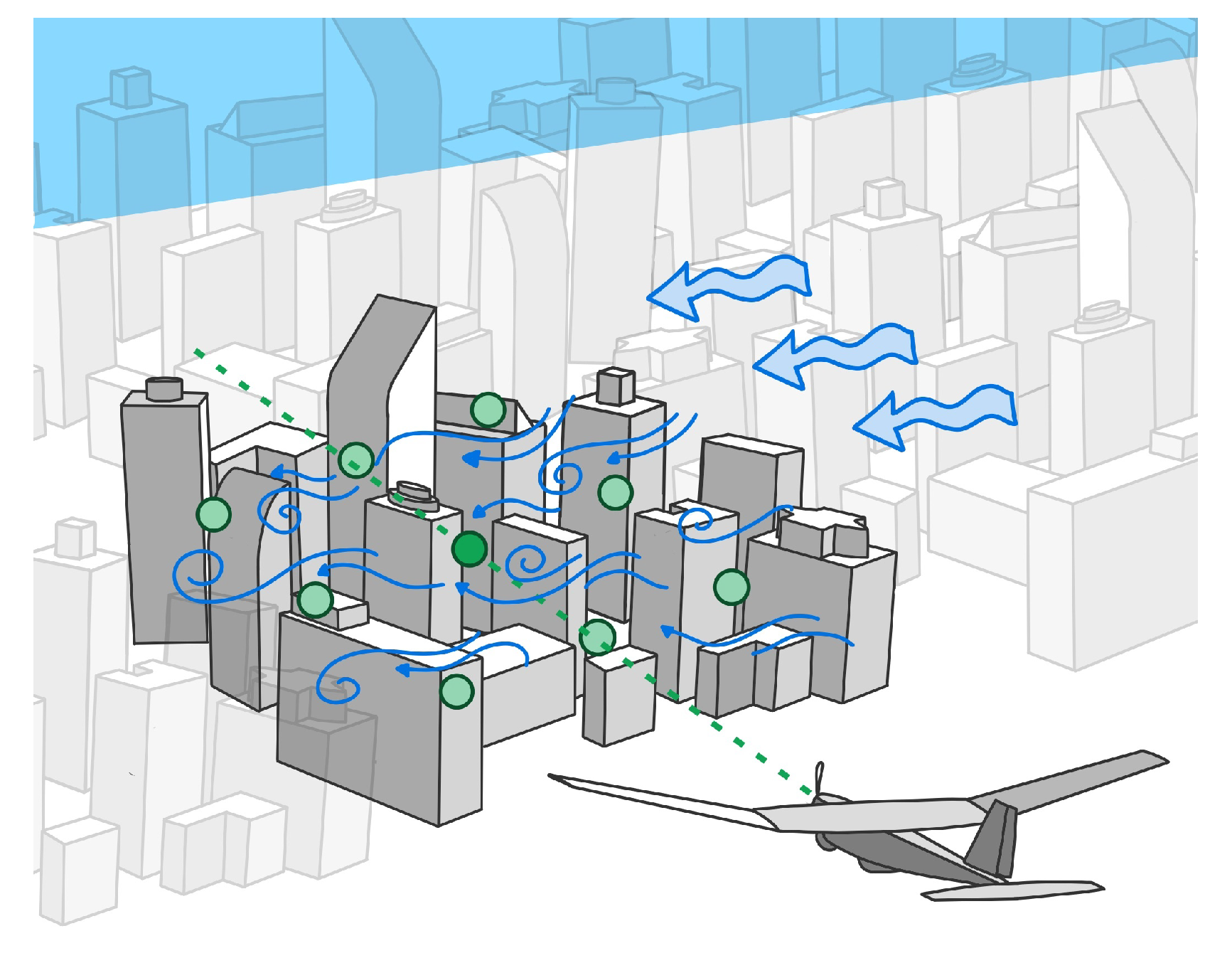
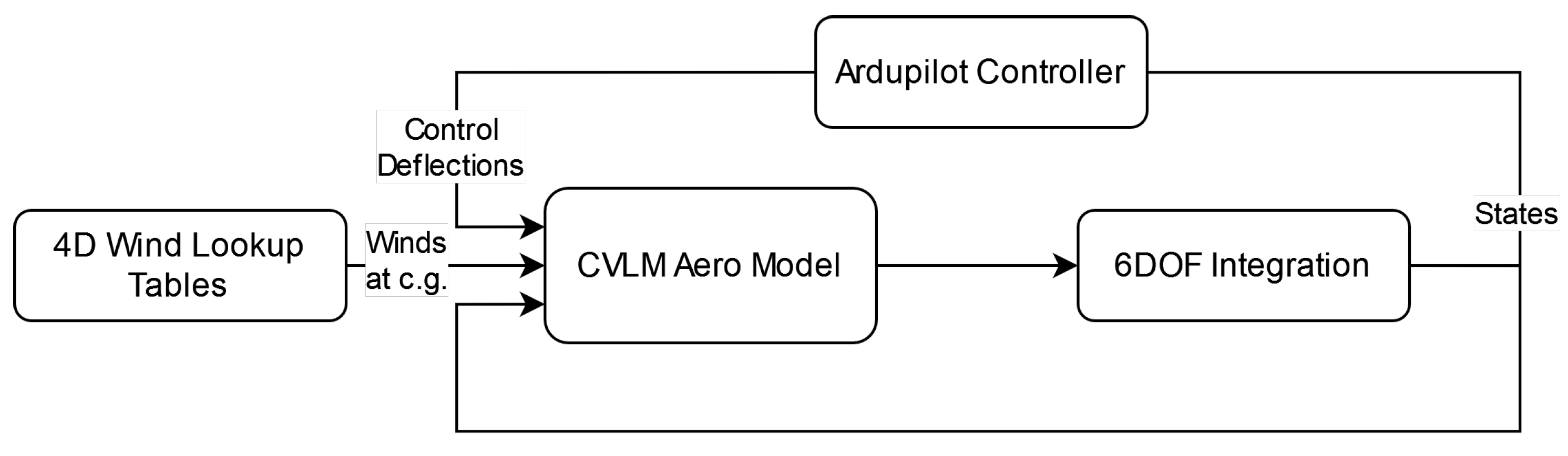
The primary objective of this paper is to develop a simulation environment capable of evaluating drone responses to arbitrary urban wind field models, as shown in
Figure 1. This environment integrates aerodynamic modeling, flight dynamics, and atmospheric modeling to capture drone interactions with urban wind conditions. A Compact Vortex Lattice Method (CVLM) was employed to efficiently compute aerodynamic forces and moments. The aerodynamic model was implemented in MATLAB R2024b and integrated with a Simulink-based simulation framework that incorporates wind data interpolation, six-degree-of-freedom (6DOF) dynamics, and autopilot implementation via ArduPilot. High-fidelity wind fields were generated using Large Eddy Simulation (LES) within OpenFOAM, providing a temporally and spatially varying atmospheric environment. The simulation framework was further enhanced by Unreal Engine 5 visualizations, enabling a comprehensive analysis of drone behavior in urban turbulence conditions. This section details the implementation of these components and their role in creating the simulation environment.
2.1. Compact Vortex Lattice Aerodynamic Model
The aerodynamic forces and moments were calculated using a compact formulation of the classical vortex lattice method (CVLM), as outlined by Bunge [
19,
20]. This approach is suitable for low-speed, low-to-moderate angle-of-attack modeling and enables the rapid simulation of various configurations. CVLM captures the dominant inviscid nonlinear effects, cross-coupling, and configuration-specific aerodynamic factors like aspect ratio’s influence on lift curve slope and induced drag. These advantages make CVLM ideal for generating the large datasets required to analyze the dynamic responses of a drone in spatially and temporally varying urban wind fields.
The classical vortex lattice method solves the Laplace equation (Equation (
1)) derived from the linearized Navier–Stokes equations using a superposition of simplified potential flow sources, most commonly horseshoe vortices or vortex ring components:
Based on the geometry of a drone’s planform, potential flow elementary flows, represented as vortex rings, are superimposed along mean camber lines, as represented by sets of vortices, and the circulation strength vector (
) is calculated using the non-penetrative boundary condition (Equation (
2)):
Here, is the aerodynamic influence coefficient matrix and is the normal velocity at control points, derived from freestream conditions, drone motion, and turbulent gusts. Once is found, aerodynamic forces and moments are computed.
For moderate vortex counts, recalculating
at each time step impacts the simulation run time. CVLM mitigates this by precomputing matrices
and
, which are unique to the aerodynamic lattice discretization. Forces and moments are then efficiently calculated using the following equations:
In these equations,
and
refer to the
ith force or moment component,
is air density, and
X is the vector containing the three body-axis translational velocity components (
V) and the three body-axis angular velocity components (
). By avoiding the recalculation of
and directly computing forces and moments, CVLM significantly reduces computation time at each simulation frame. Bunge and Kroo creatively incorporated control surface deflection effects by adjusting the normal vectors at the control points associated with the control surfaces. A slightly modified
X vector, which includes control surface deflection angles, retains the computational efficiency of the aerodynamic force and moment calculations, as reflected in Equations (
3) and (
4), and is described in Ref. [
19]. The CVLM aerodynamic force calculation methodology was implemented in our simulation framework using Quadair [
20]. Readers seeking further details on the formulation of CVLM and the construction of the
and
matrices are referred to Ref. [
19].
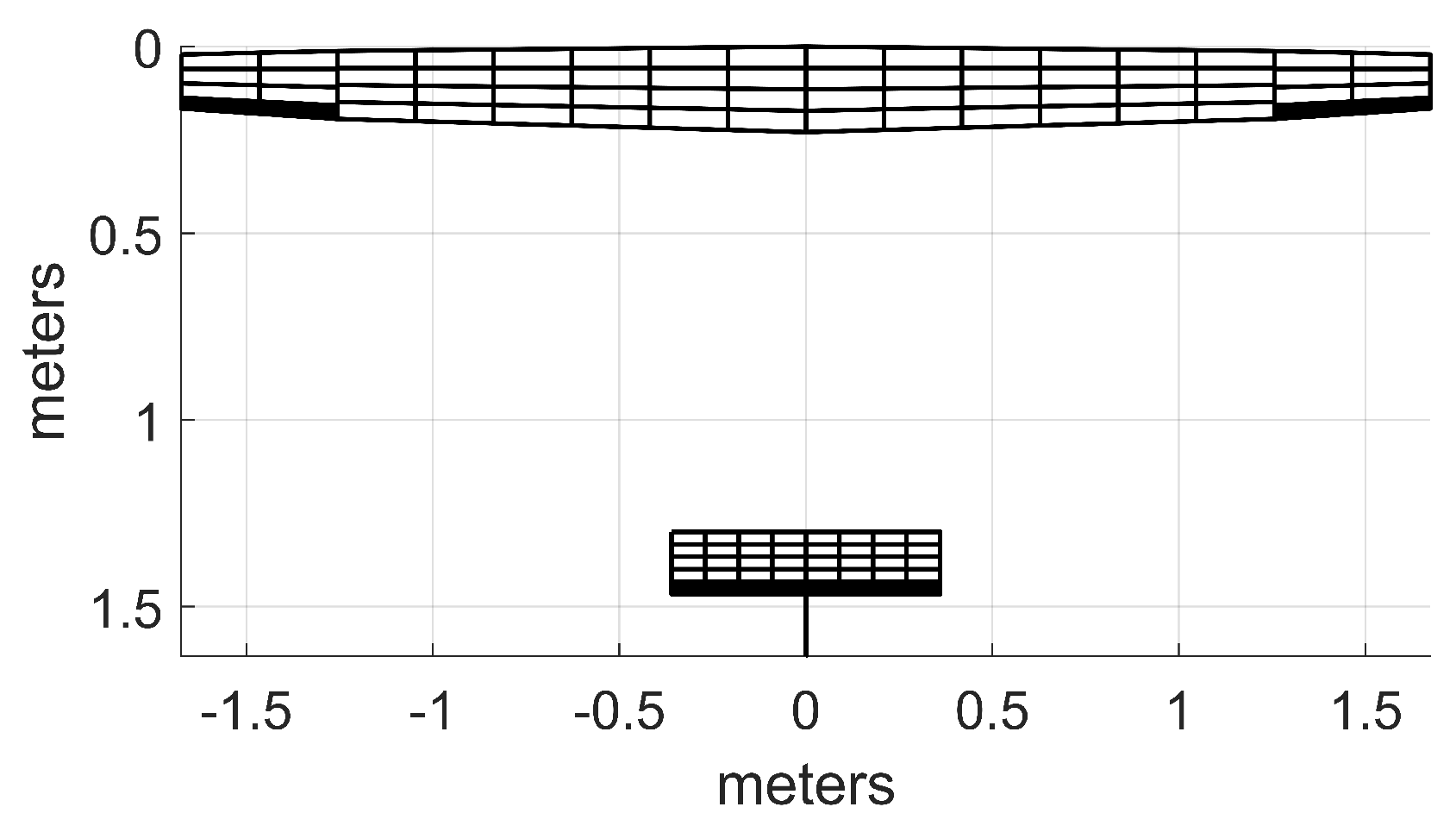
The aerodynamic grid of the planform used to generate the results of this paper is shown in
Figure 2, with inertia properties and other considerations listed in
Table 1. This configuration is based on the Zipline delivery drone [
21] and was created based on photographs and publicly available information, including estimates of airspeed and total mass. The v-tail ruddervator featured on the original drone was projected into the body frame to simplify the control surface allocation logic. With the aerodynamic grid and inertia properties defined, Quadair was utilized in conjunction with an integration scheme in Simulink to simulate the response of the configuration through the urban wind field.
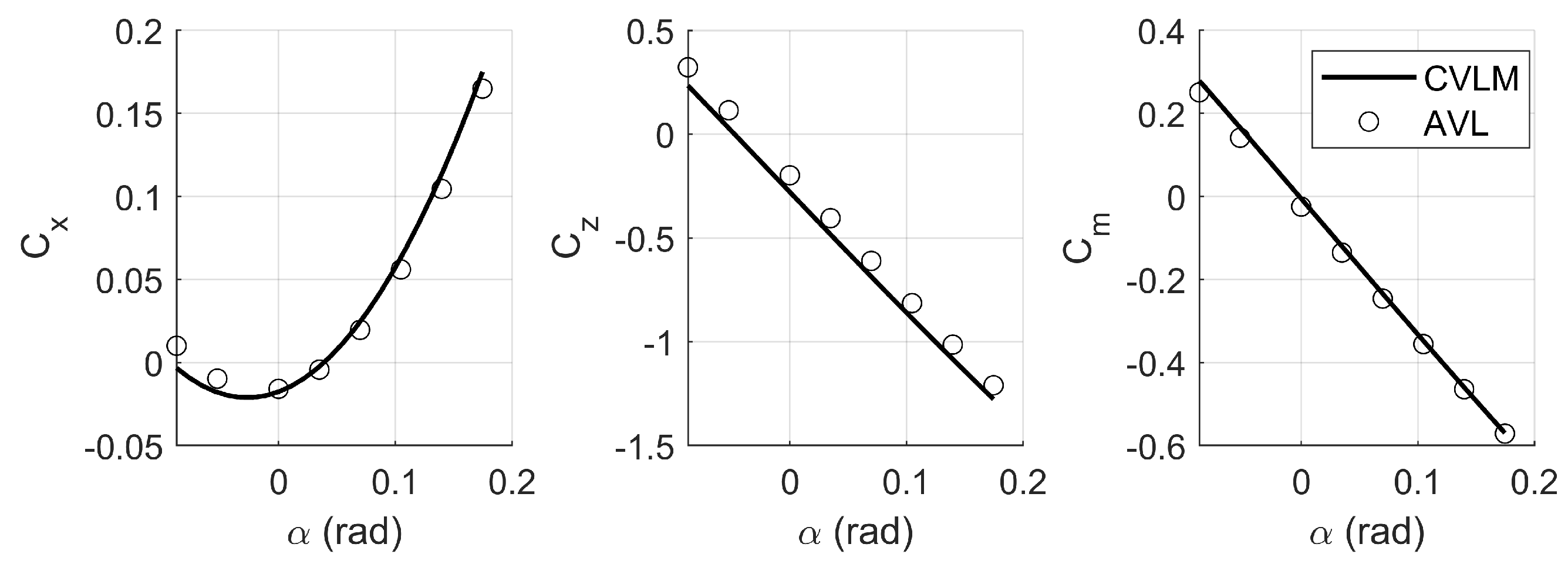
A comparison of the aerodynamic outputs between Quadair and AVL [
22], a widely recognized vortex lattice method code, is presented in
Figure 3 to validate the implementation of the Quadair codebase. Linear stability and control derivatives were extracted, and the short-period and phugoid dynamic modes were identified. The characteristics of these modes are summarized in
Table 2. Notably, the frequency of the fastest mode, the short period, is 0.5 Hz, supporting the choice of a 1-s sampling rate for the wind field implemented in the simulation environment.
2.2. Simulink Simulation Environment
Figure 4 summarizes the Simulink environment used to navigate the delivery drone through the wind fields. This simulation environment was created and executed on a modest consumer-grade desktop. The specifications of this desktop are listed in
Table 3.
Wind data were integrated into the simulation environment using built-in n-D Lookup Table blocks, with each block corresponding to one of the primary wind velocity components. The wind data were loaded into MATLAB as four-dimensional arrays, which were then passed to the n-D Lookup Tables. The dimensions of these arrays represent time, the North position, the East position, and altitude, enabling both spatial and temporal interpolation of the wind field. Each wind field domain occupied approximately 29 GB of storage when discretized onto a 3D rectilinear grid with 1 m spacing along all axes. The total size of the 4D arrays for each domain is 151 × 350 × 300 × 120. Before running the simulation, these values are compiled and allocated into RAM by Simulink. For the results presented in this paper, 30 m altitude chunks were loaded into the n-D Lookup Tables, keeping RAM usage well below the system’s capacity. Larger domain sizes can be accommodated by this simulation environment, particularly if RAM capacity is increased—modern consumer desktops support up to 192 GB.
At each time step, the wind vector is combined with the drone’s body velocities to form the state information matrix, as shown in Equation (
5), incorporating the wind effects into the CVLM force and moment calculations. This combination of the wind vectors is described by Equations (
6) and (
7), consistent with Ref. [
23] and captures the instantaneous change in the aerodynamic angles. This is achieved by projecting the wind magnitudes described in the inertial axis onto the drone body frame using the rotation matrix (
). The wind velocities described in the body axis (
) are then subtracted from the drone body velocities to define the velocities of the drone relative to the air (
), which are used for the calculation of the aerodynamic forces and moments.
The Euler attitude representation of the 6DOF block native to the Aerospace Blockset is then used to integrate the equations of motion forward to find the updated states of the vehicle. Simulink handles the selection of the integration scheme and time step automatically. The states are then sent to ArduPilot using Transmission Control Protocol (TCP) network communication [
24], and control input pulse-width modulation (PWM) signals are received. These signals are converted to commanded deflections, and actuator dynamics are applied. The actuator dynamics are represented using the transfer functions provided in
Table 4, provided by Schulze et al. [
25] for a representative small UAS platform.
ArduPilot version 4.5 [
26], an open-source autopilot software suite that is widely used in the drone community, was integrated with Simulink to enable waypoint tracking and navigation. This integration was achieved by running the autopilot software concurrently with Simulink and exchanging data over TCP. The states of the drone (attitude, position, velocity, etc.) are sent from Simulink to ArduPilot, which in turn sends control deflection inputs back to Simulink. The network communication protocol is implemented using Simulink blocks available on the GitHub repository repository hosting the ArduPilot codebase [
27].
The ArduPlane control architecture consists of nested PID control loops. The Total Energy Control System (TECS) runs concurrently and manages airspeed and altitude by adjusting throttle and pitch. Due to the TCP’s communication with the software, sensor fusion is turned off and the outputs from the simulation environment are accepted as the states.
The tuning of the control law gains was handled using the Autotune mode in ArduPilot. During simulation, the drone was flown using a control stick, and the software automatically adjusted the gains based on the drone’s response to pitch, roll, and yaw commands. All parameters in ArduPilot were reset to their default values before tuning, including the AUTOTUNE_LEVEL parameter, which dictates the aggressiveness of the tuning. The default value of AUTOTUNE_LEVEL is 6, corresponding to a medium level of tuning. The gains obtained from the autotune and used to generate the results of this paper are outlined in
Appendix A.
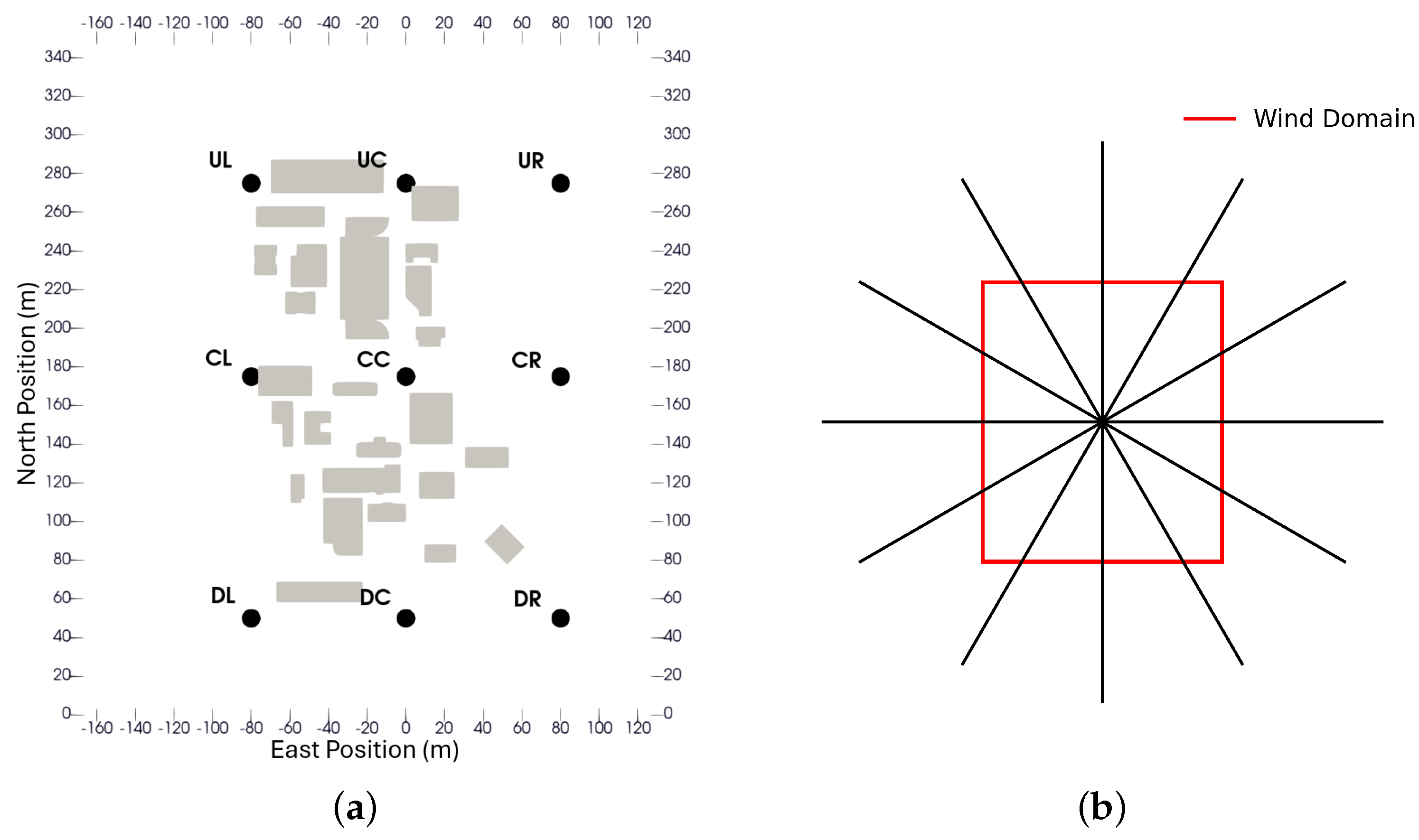
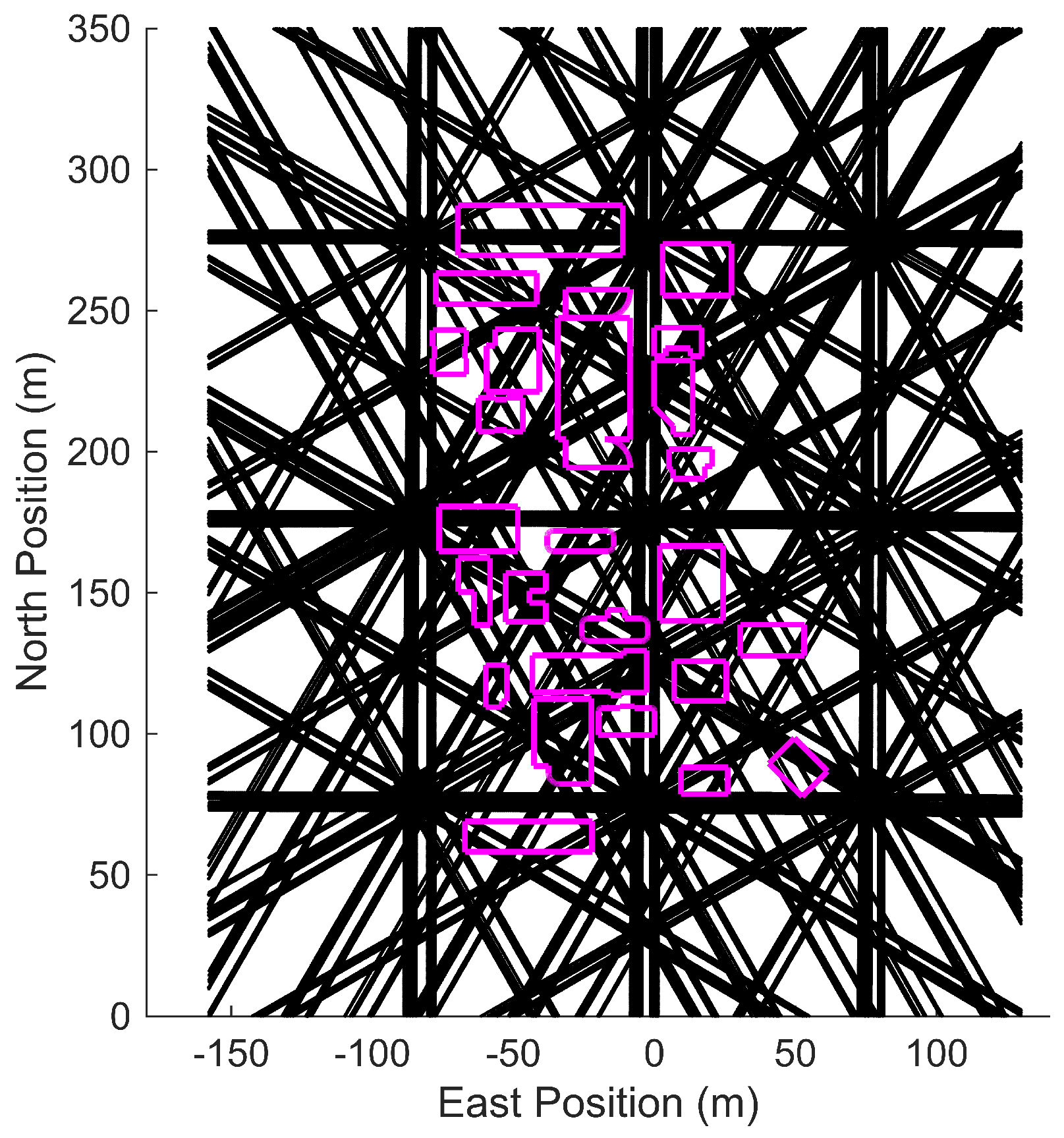
ArduPilot executed the mission profiles depicted in
Figure 5. To capture distinct wind structures and spatial variations in the environment, these azimuths were flown around nine central locations (
Figure 5a). Center points, labeled with identifiers such as UL, UC, and UR, define a grid over the cityscape to enhance the spatial diversity of the airspace sampled for vehicle impact analysis. Azimuths were varied in increments of
(
Figure 5b) to ensure the configuration interacted with the wind field from different orientations as each center point was approached. The Mission Planner interface, shown in
Figure 6, was then used to begin the test plan and collect the results.
The simulation environment supports the ability to visualize the simulation using Unreal Engine 5 (UE5). This ability is optional and can be ignored if all computational resources are necessary to run the simulation. Custom environments and drones can easily be created using UE5 and Computer-Aided Design (CAD) tools.
Figure 7 demonstrates these capabilities, where the city used to create the LES wind fields and a representation of a delivery drone are integrated into the simulation environment.
2.3. Atmospheric Modeling
A realistic atmospheric wind field was generated using computational fluid dynamics (CFD) solver Open-source Field Operation and Manipulation (OpenFOAM) [
28]. OpenFOAM could be characterized as a numerical solver toolbox used to perform CFD simulations for various fluid flow problems like turbulence modeling, combustion, and multi-phase flow problems [
29]. Large-Eddy Simulation (LES) methodology for turbulence modeling was used to generate an atmospheric boundary layer with turbulent wind flow to interact with a typical urban landscape with buildings.
2.3.1. Governing Equations
In this study, we simulated the wind field by solving the incompressible Navier–Stokes equations, using the Boussinesq approximation to account for buoyancy effects in a Cartesian coordinate system. We employed a Large-Eddy Simulation (LES) framework coupled with a Subgrid-Scale (SGS) turbulence model to capture turbulent scales that remain unresolved. Detailed descriptions of the continuity and momentum equations, numerical methods, and the SGS model are provided briefly here. For further details, readers may refer to our previous work [
15].
Filtering the above equations, and after simplification, we obtained the following:
It is impossible to determine the quantity
, but the quantity
is known. Substituting
yields
where
(with
) denotes the velocity components, and
represents the sub-grid scale stress tensor.
When combined with the Boussinesq hypothesis, the sub-grid stress can be written as follows:
where,
For LES Sub-Grid-Scale (SGS) closure, the Wall-Adaptive Local Eddy viscosity (WALE) model [
30] was used. The effects of turbulent wall surface and momentum transfer were considered, setting it apart from the traditional Smagorinsky model of turbulence closure. The turbulent viscosity was computed using the following:
where
is the filter scale determined by the lengths of the element in
x,
y,
z directions,
, and
is computed using
Here,
2.3.2. Simulation Setup and Domain
To generate a dynamically evolving turbulent inflow for the LES simulation, we specify not only the inlet velocity field but also the associated Reynolds stress components and eddy length scales. These turbulent inflow conditions were obtained from a precursor Reynolds-Averaged Navier–Stokes (RANS) simulation, as recommended in [
15,
31]. In this setup, the RANS domain’s outlet dimensions are matched to the LES inlet to ensure consistency between the simulations. A streamwise domain length of 5 km was chosen, and the inlet wind profile was defined using a logarithmic law with a reference height (
), at which the wind speed was set to 8 m/s, following [
15,
31]. The LES inlet boundary condition was implemented using OpenFOAM’s
atmBoundaryLayer method, with a ground-plane surface roughness length (
) of 0.33 m [
32].
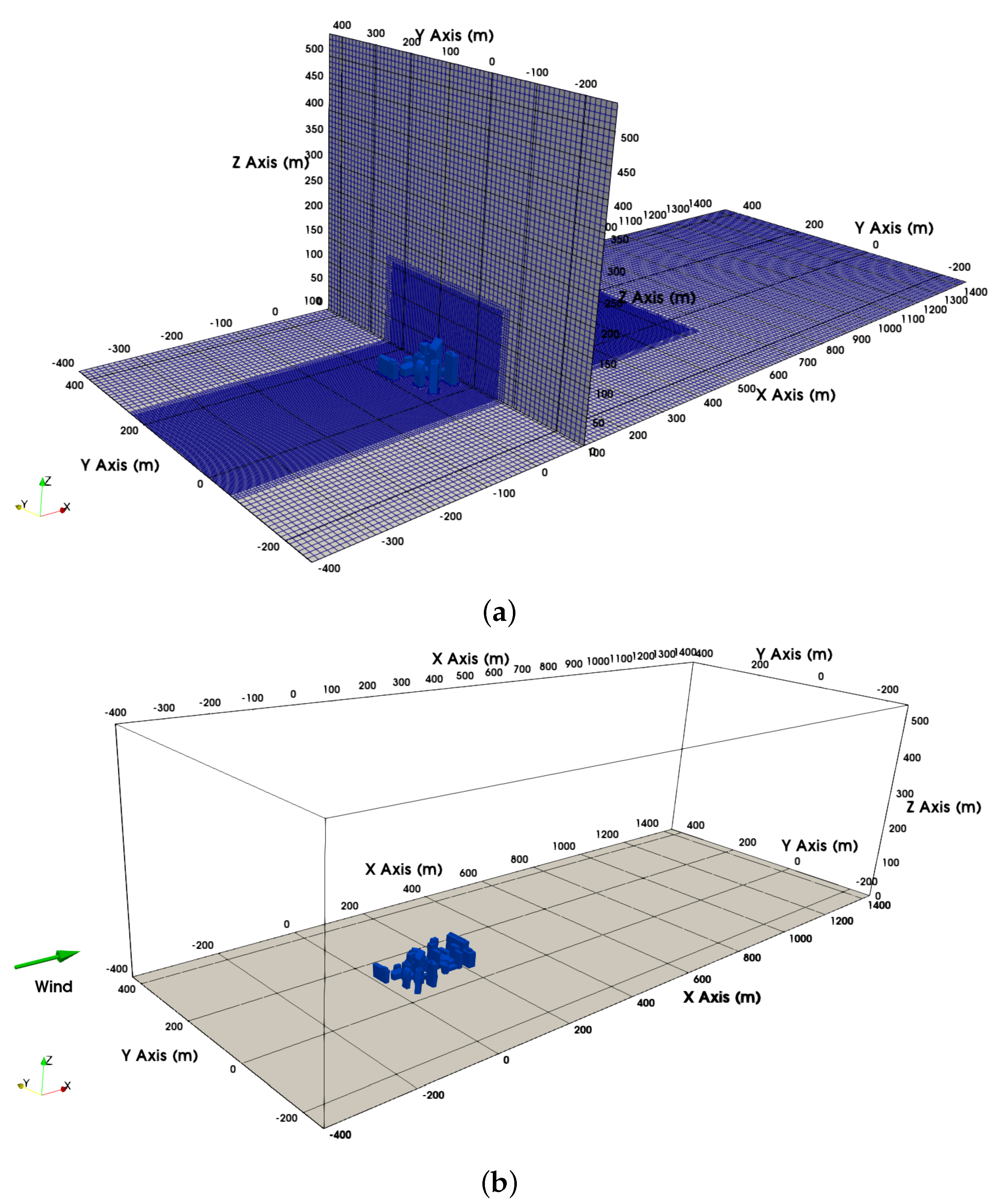
The LES simulation domain, shown in
Figure 8, was selected based on the recommendations of Frank et al. [
33] to ensure that the blockage ratio remained below 3%. The blockage ratio was calculated by assuming that the buildings, which occupy the entire designated area, form a continuous obstruction. The domain dimensions were defined relative to the height of the tallest building (
): the domain was
high,
wide, and
long, with an upstream extension of approximately
and a downstream extension of about
.
4. Discussion
The results underscore the inadequacy of existing turbulence models in replicating urban environmental conditions. As highlighted in
Table 5, the von Kármán turbulence model, with a magnitude of 15.43 m/s at 6 m altitude, severely underpredicts the maximum g-loading experienced in the LES wind at the 60 m target altitude. This discrepancy is concerning because the 15.43 m/s is typically categorized as medium-level turbulence, yet it fails to represent the LES wind conditions at 6 m altitude, which were found to be 2.28 m/s. This mismatch between traditional turbulence model categorizations and actual urban wind conditions can lead to an underestimation of g-loadings during the preliminary design phase, posing significant challenges for the certification process. These findings highlight an urgent need to develop new turbulence models specifically designed for certifying drones in urban environments.
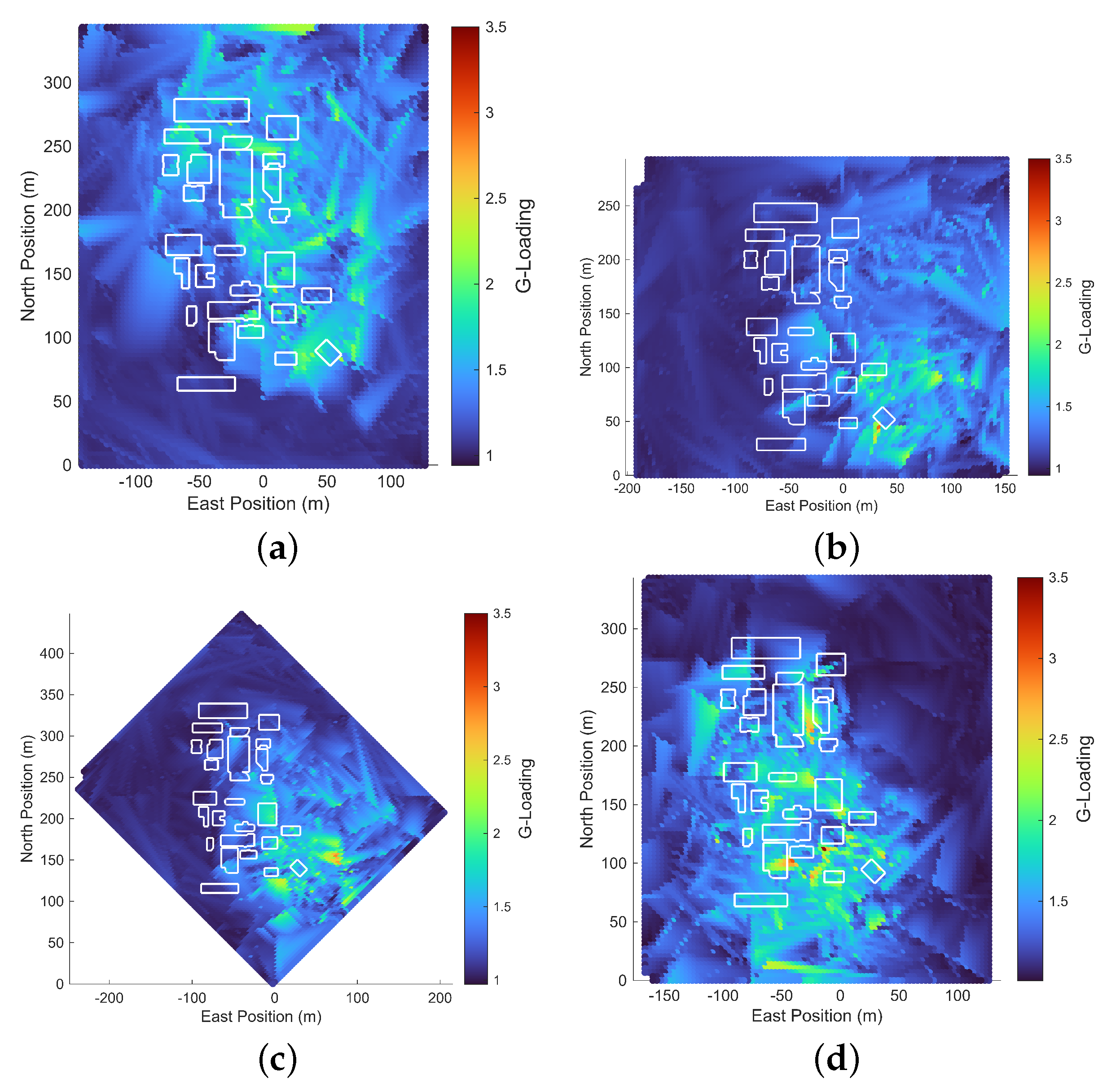
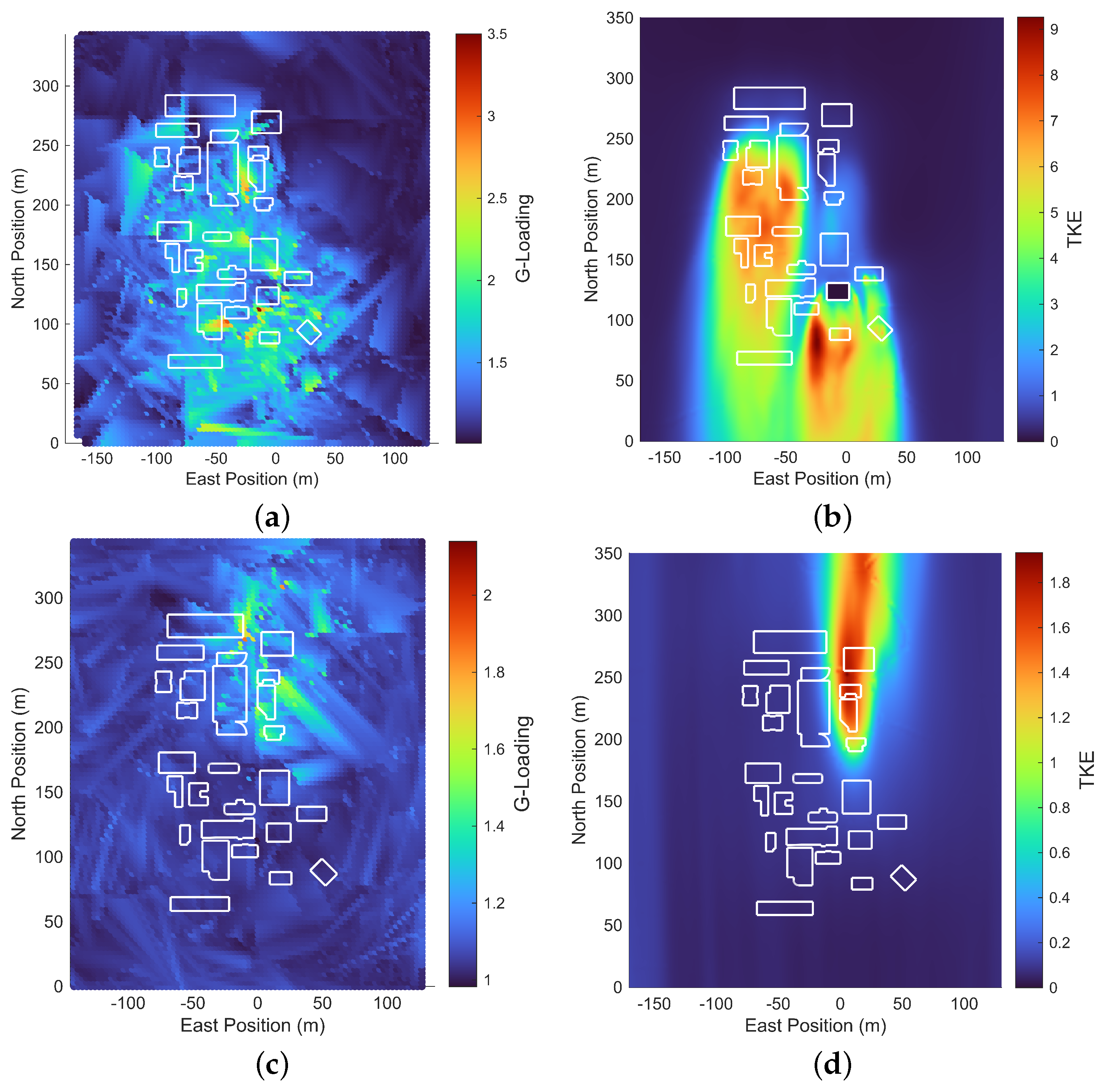
Traditional turbulence models lack spatial significance, which limits their applicability to urban environments. In contrast, the methodology described above allows drone responses to be modeled spatially, enabling the zoning of urban areas based on expected maximum g-loading, as illustrated in figures such as
Figure 15a,c. This approach identifies challenging locations for drone navigation and categorizes them according to the inflow conditions. With a sufficiently large database, this information can be leveraged to optimize mission paths through urban environments, particularly for applications like package delivery.
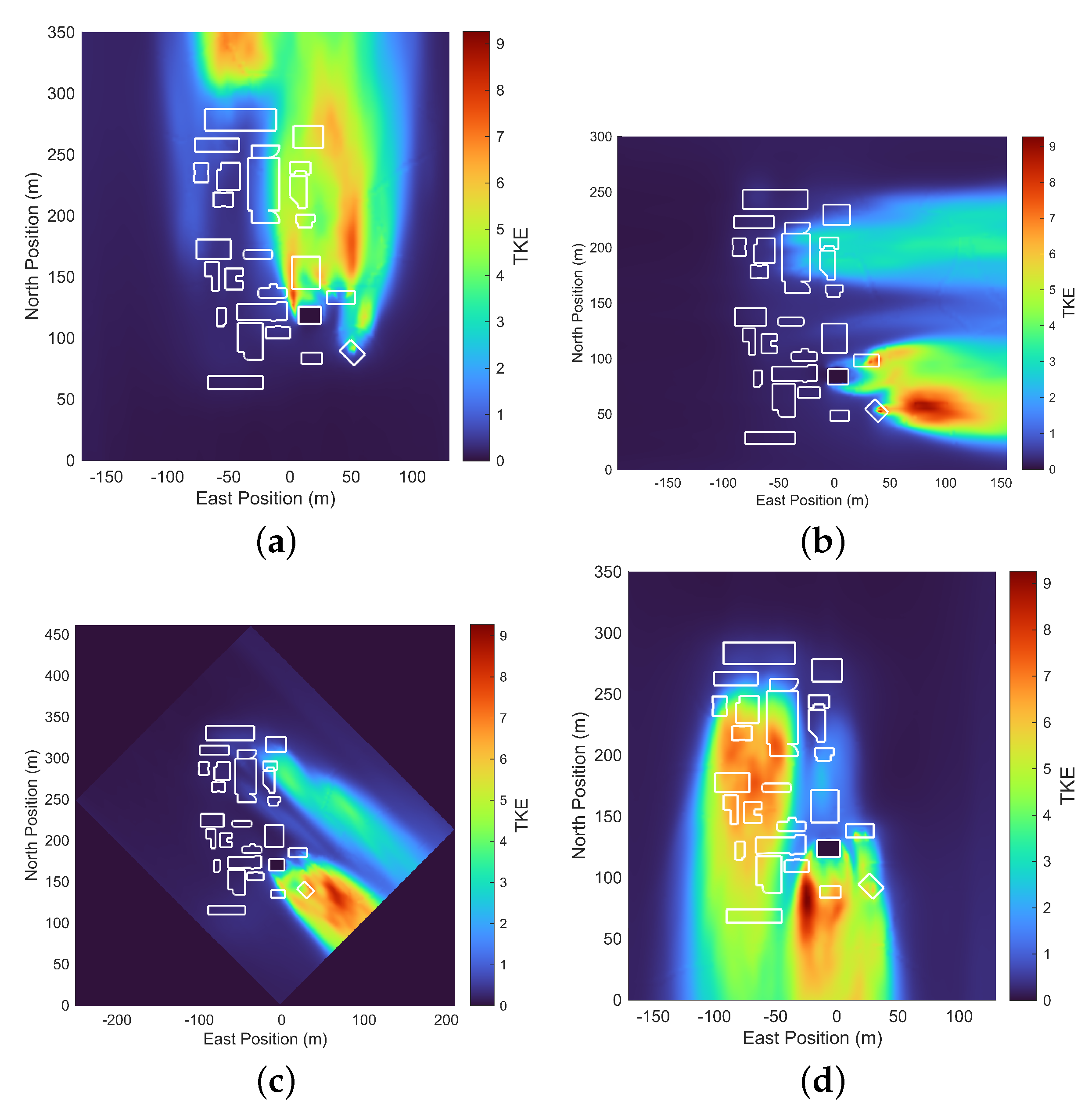
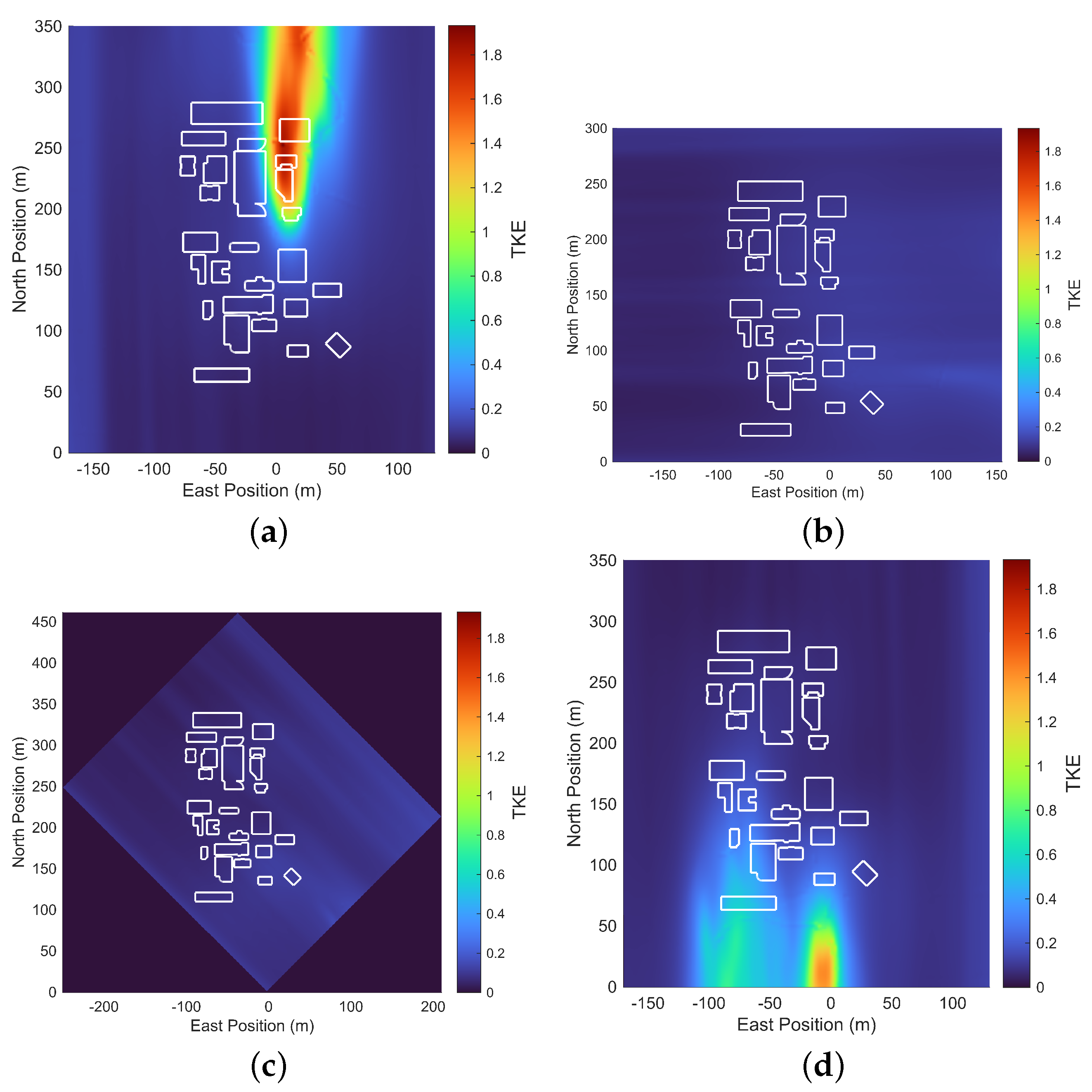
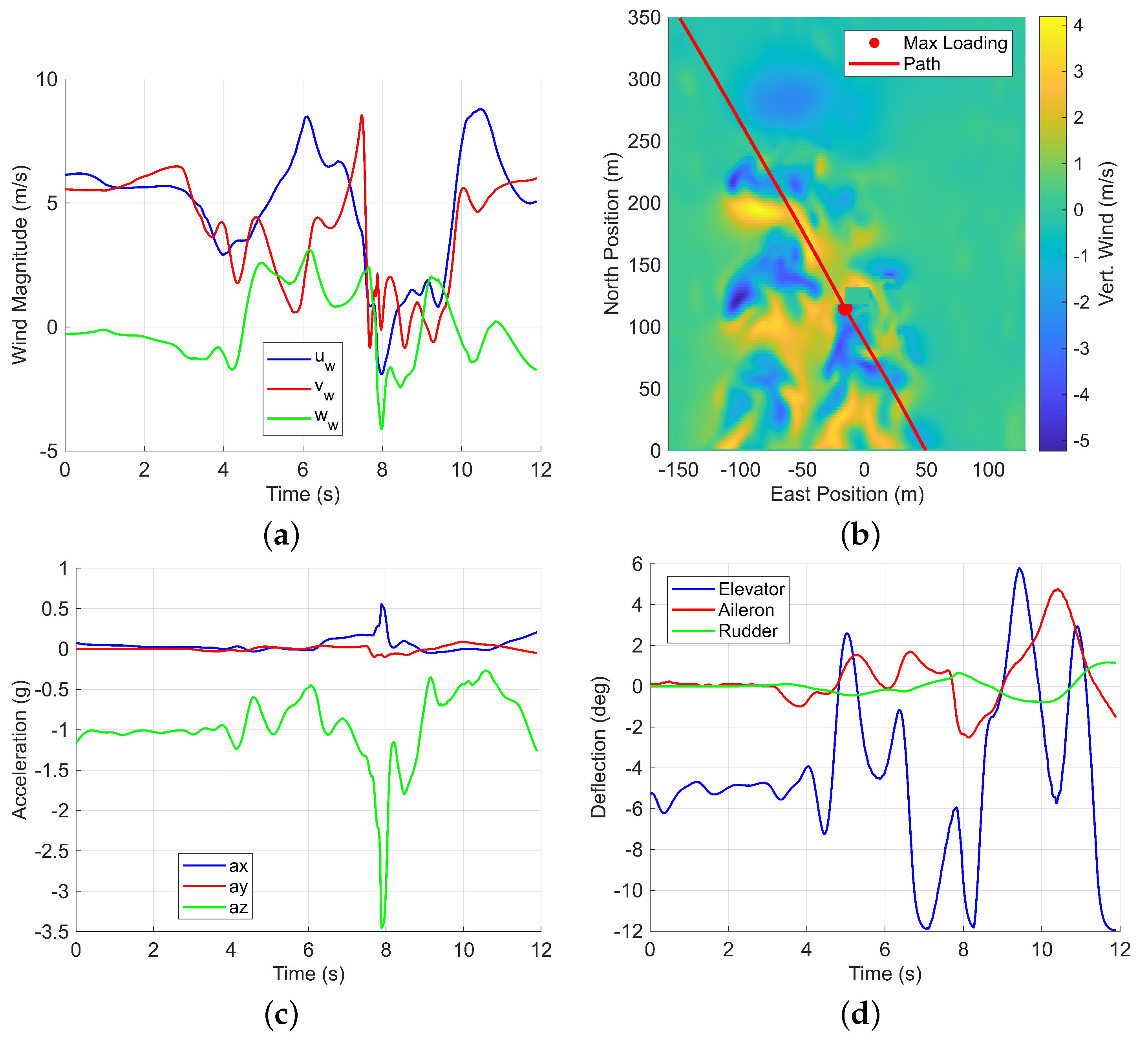
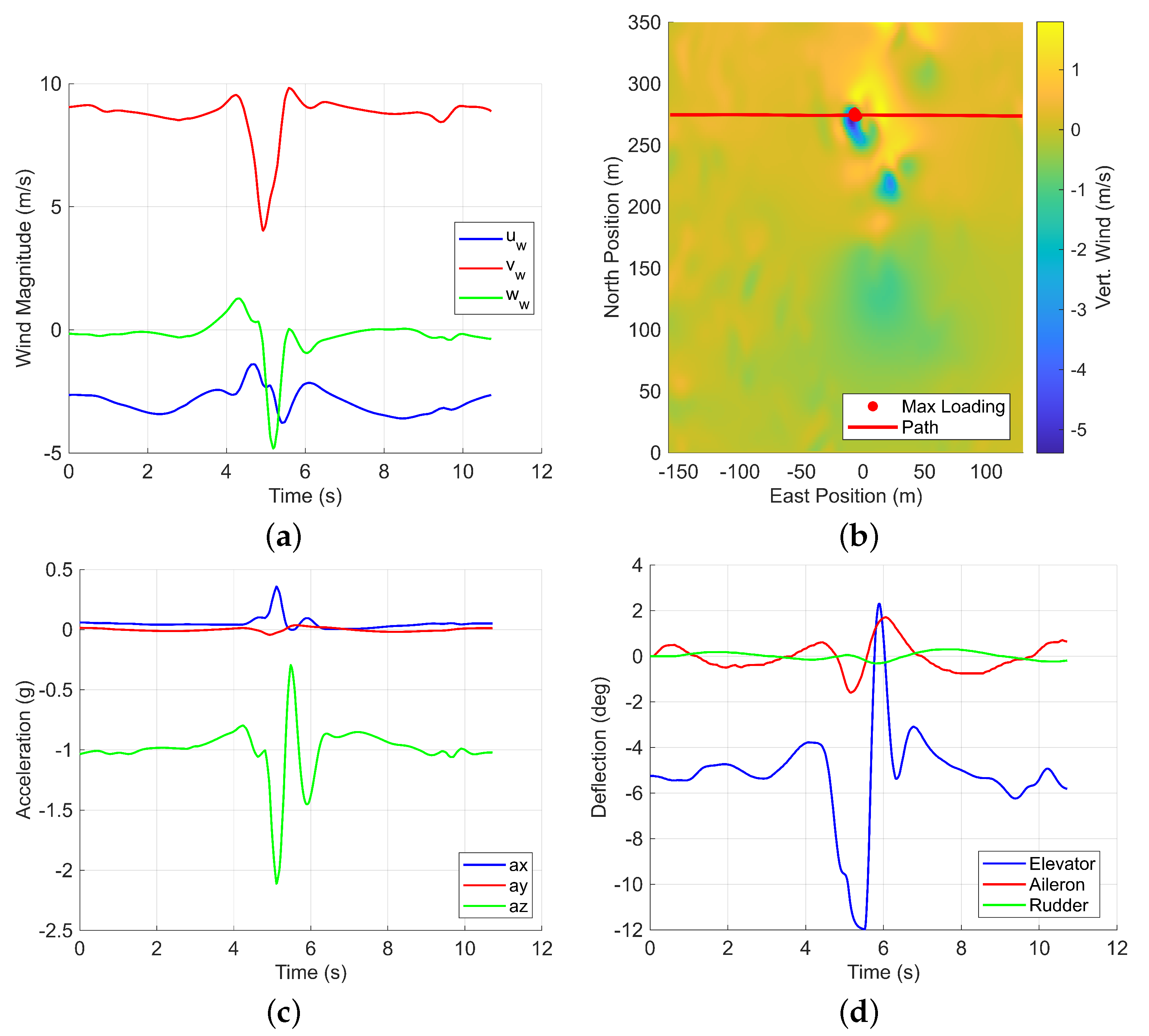
The TKE metric provides valuable insight into the locations of higher g-loads when compared to the maximum g-loading plots. As shown in
Figure 15, maximum g-loadings consistently occur in areas with significant TKE gradients. For instance, these gradients are particularly evident when the drone emerges from the profile of the tallest building, as depicted in
Figure 15a,b. This observation suggests that focusing on paths along these TKE gradients can streamline the identification of the, maximum expected g-loads and their corresponding zones, saving both time and effort. Future work will explore the significance of the TKE metric in this type of analysis in greater detail.
6. Conclusions
A flexible simulation environment, combining vehicle open-loop dynamics models in Simulink and control loop closures via the common drone Ardupilot flight control software, was created to evaluate fixed-wing AAM platforms in challenging wind environments. Due to the lack of existing urban turbulence models, LES CFD simulations of a notional cityscape were generated following the best practices available in the research literature. The urban operational environment was thoroughly explored for constant wind magnitudes through varying wind inflow azimuth and simulating drone flight and wind interactions via a one-way coupling approach. Phenomena, such as the non-repeating wind patterns and temporal/spatial variation in the wind effects, encouraged the thorough sampling of the domain with several initial azimuths, start times, and centralized points, and the response of the drone was recorded for each encounter.
The work presented is novel as it expands upon prior research efforts outlined in the literature through integrating a CVLM aerodynamic solver capable of accommodating arbitrary fixed-wing platforms, rather than relying on preexisting models, which are limited to specific airframes. Unlike previous studies that constrained turbulent interactions to simplified two-dimensional, temporally frozen fields [
16], or an RANS database [
13], this simulation environment captures the full spatiotemporal variation in an LES-generated urban wind field. This allows for the rapid deployment and evaluation of a wide range of fixed-wing AAM configurations, enabling the efficient computation of their dynamic responses to the complex, time-varying wind environments commonly found in urban settings.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}