



A Novel HGW Optimizer with Enhanced Differential Perturbation for Efficient 3D UAV Path Planning


Abstract
1. Introduction
- (1)
- A novel SDPGWO algorithm has been developed to address the challenges of 3D UAV path planning.
- (2)
- The SDPGWO algorithm simplifies GWO to decrease computational complexity and incorporates a differential perturbation strategy to boost its global search capabilities.
- (3)
- The efficacy of our proposed algorithm for 3D UAV path planning is demonstrated through simulations, which show its superior performance compared with other related algorithms.
2. UAV Path Planning
2.1. Problem Description
2.2. Path Representation

2.3. Objective Function
2.4. Path Smoothing
3. Improved Gray Wolf Optimizer Algorithm
3.1. Standard GWO Algorithm
| Algorithm 1 Pseudocode of the GWO method |
|
3.2. The Proposed SDPGWO Algorithm
| Algorithm 2 Pseudocode of the SDPGWO method |
Initial
Optimize
|
3.3. Application of SDPGWO in UAV Path Planning
- Define the UAV flight scenario in 3D space. Load UAV mission parameters and environmental information, including the waypoints, the UAV’s initial and target positions, obstacle positions, and the flight constraints.
- Initialize UAV flight path information. First, transform the coordinate system according to Equation (1). In the new coordinate system, randomly assign initial positions to the gray wolf population, which will represent the initial trajectory of the UAV. Calculate the fitness value of each individual using the objective function , and select the best individual to set as .
- Output the optimal solution. Once the algorithm reaches the maximum iteration limit, conclude the search process and present the best solution found. Otherwise, if the maximum iteration limit has not been reached, the algorithm returns to Step 3 to continue the optimization process.
- Coordinate system inverse transformation. Apply the coordinate system inverse transformation to the optimal path obtained in Step 4. Perform a smoothing operation on the transformed path to generate the final UAV flight path.
4. Simulation Example
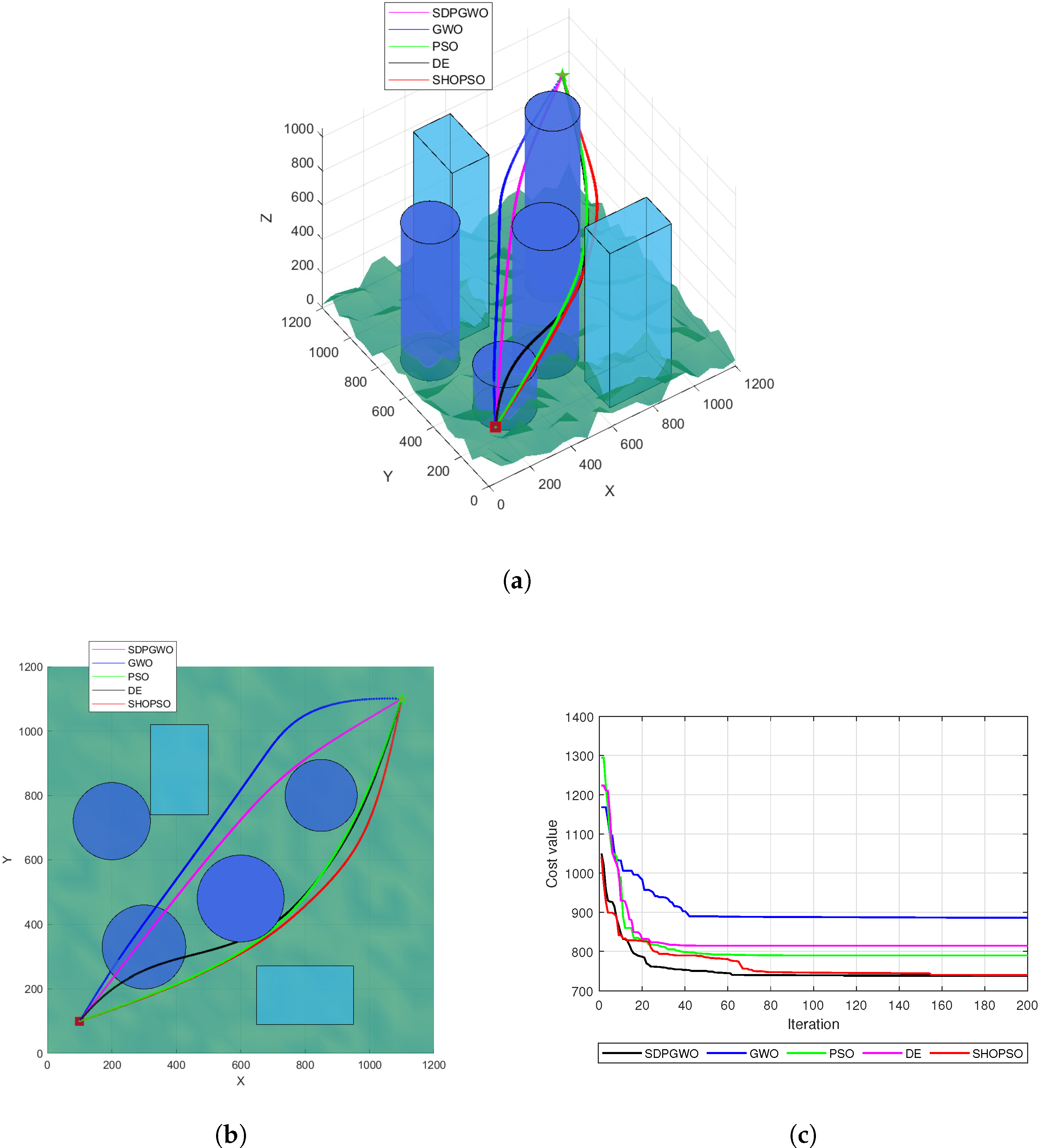
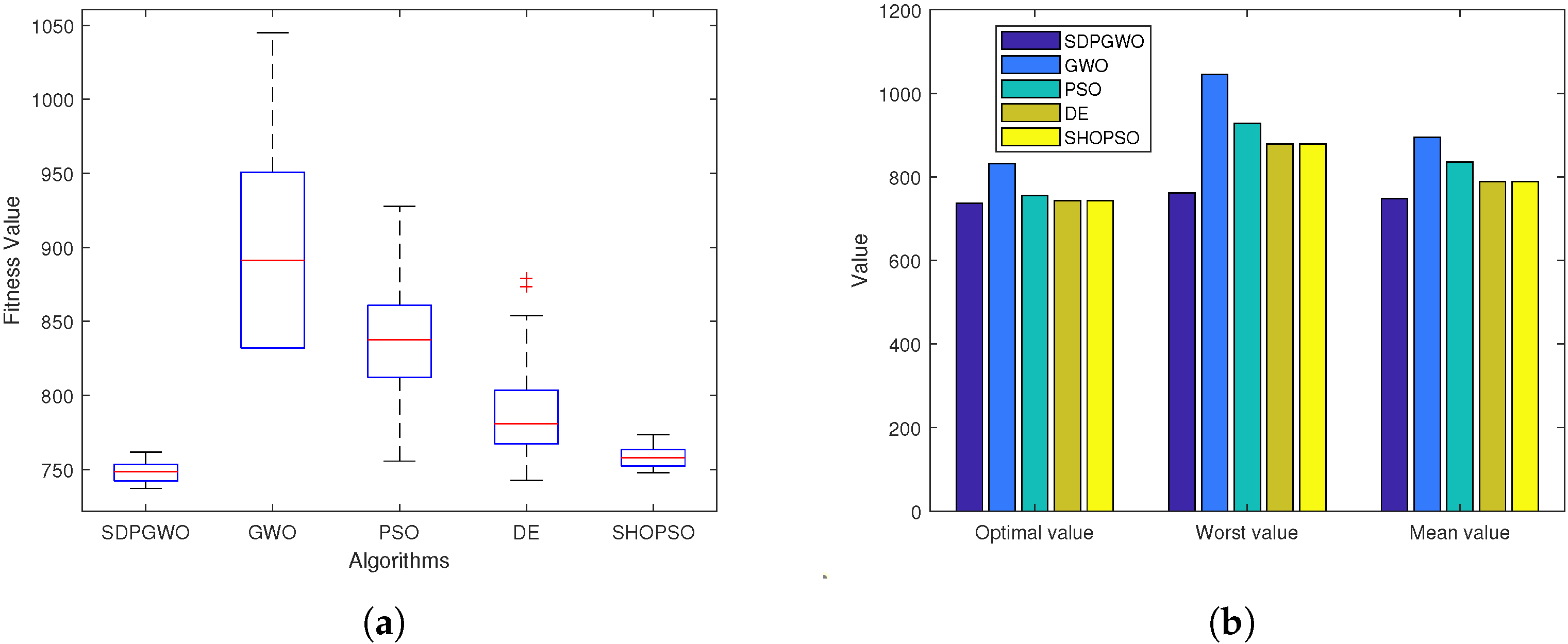
4.1. Experimental Results in Map 1
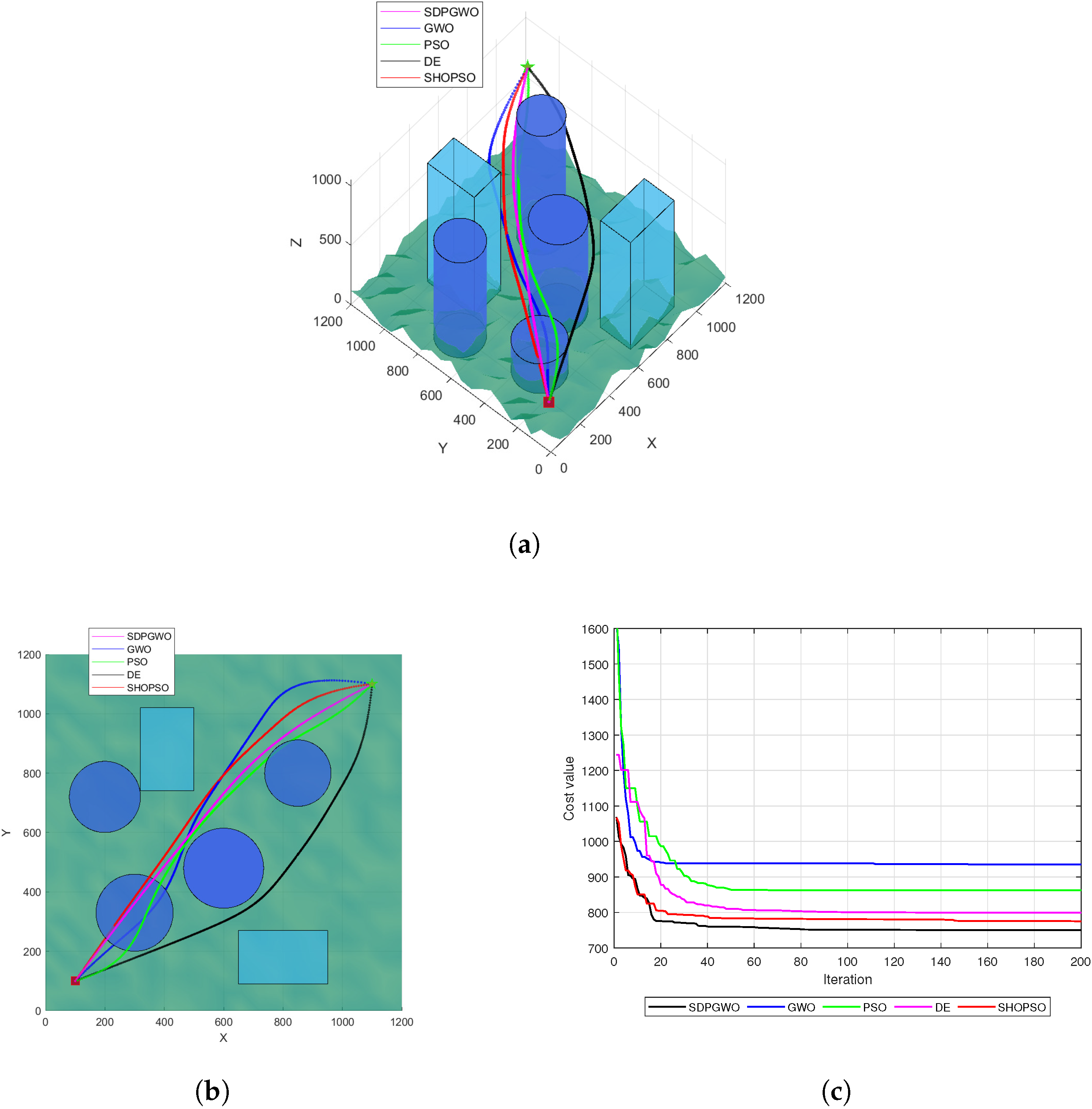
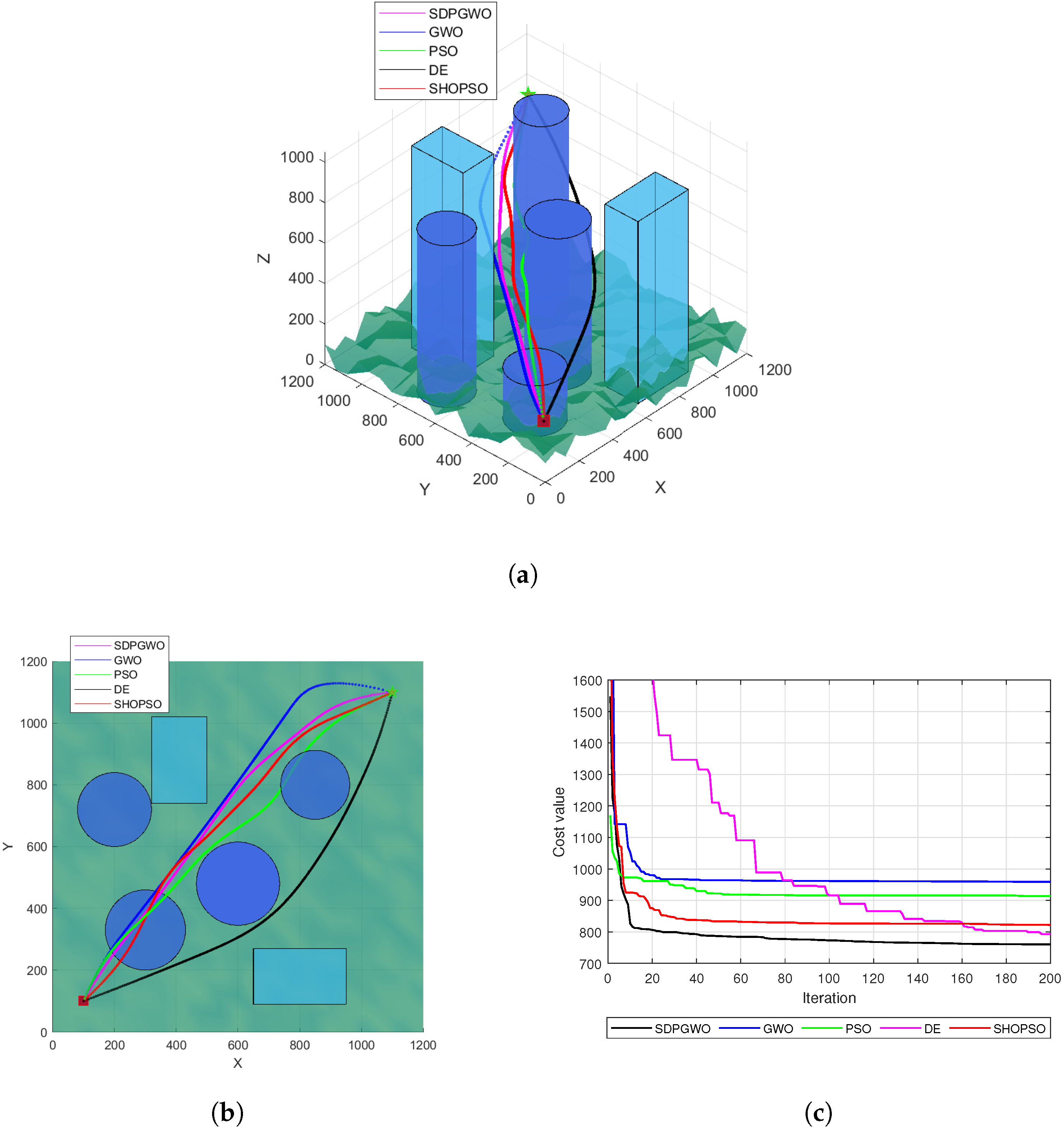
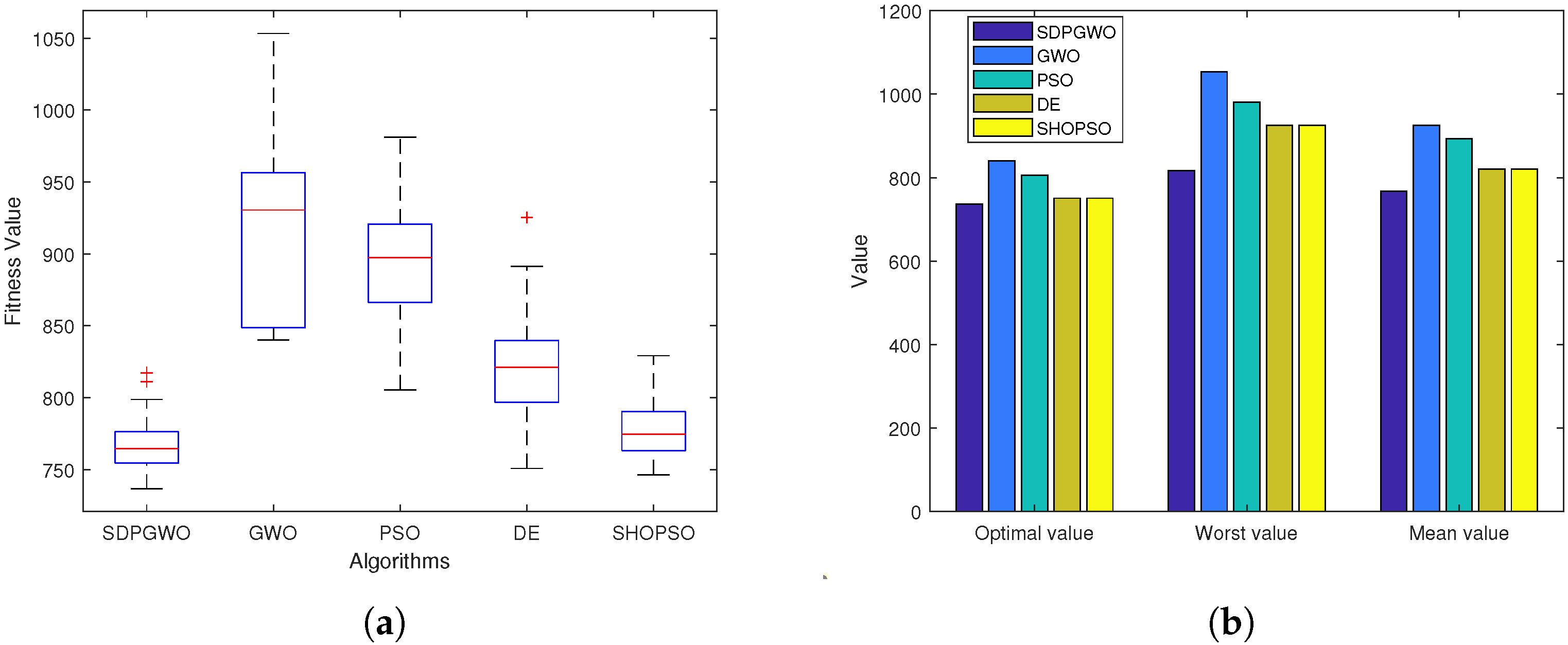
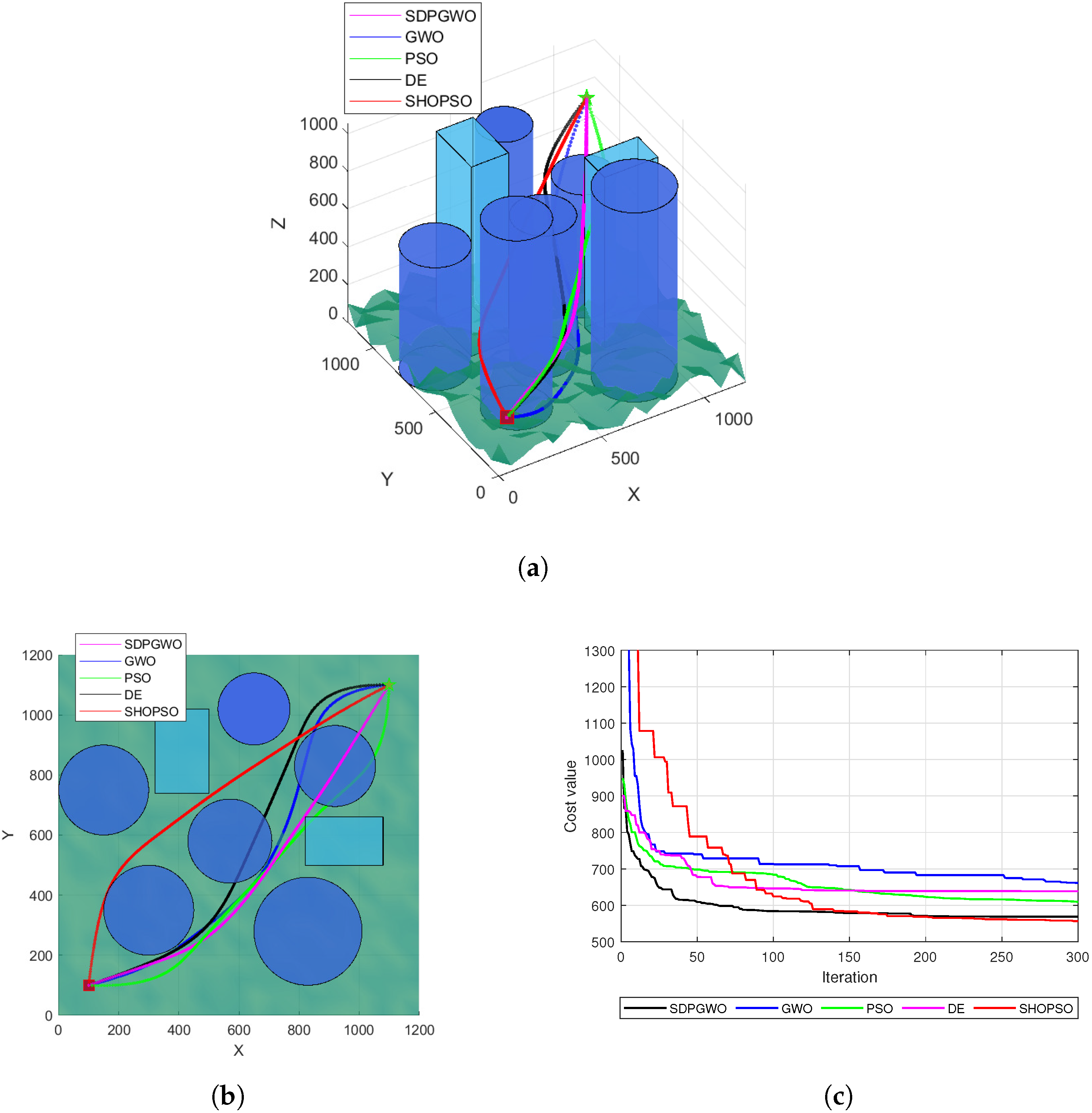
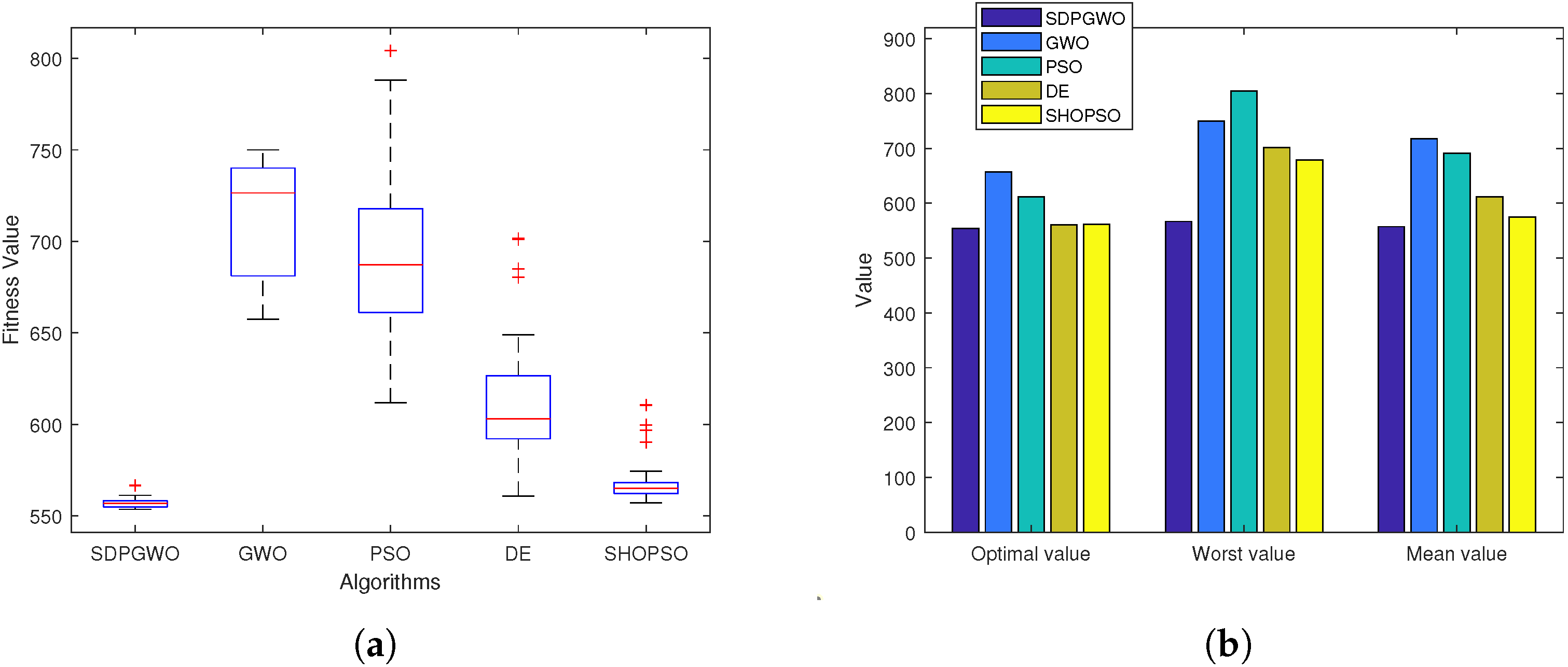
4.2. Experimental Results in Map 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Qu, L.D.; Jia, Y.J.; Li, X.Q.; Fan, J.K. Two-stage control model based on enhanced elephant clan optimization for path planning of unmanned combat aerial vehicle. J. Supercomput. 2024, 80, 24938–24974. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervas. Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.C.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Zhen, Z.Y.; Xing, D.J.; Gao, C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Yang, P.; Tang, K.; Lozano, J.A.; Cao, X.B. Path planning for single unmanned aerial vehicle by separately evolving waypoints. IEEE Trans. Robot. 2015, 31, 1130–1146. [Google Scholar] [CrossRef]
- Qadir, Z.; Zafar, M.H.; Moosavi, S.K.R.; Le, K.N.; Mahmud, M.A.P. Autonomous UAV path-planning optimization using metaheuristic approach for predisaster assessment. IEEE Internet Things 2021, 9, 12505–12514. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, J.X.; Wang, J. Sequential convex programming for nonlinear optimal control problems in UAV path planning. Aerosp. Sci. Technol. 2018, 76, 280–290. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Sun, T.; Sun, W.; Sun, C.; He, R. Multi-UAV Formation Path Planning Based on Compensation Look-Ahead Algorithm. Drones 2024, 8, 251. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, S.B.; Hu, X.T. Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments. IEEE Internet Things 2020, 8, 4906–4919. [Google Scholar]
- He, W.J.; Qi, X.G.; Liu, L.F. A novel hybrid particle swarm optimization for multi-UAV cooperate path planning. Appl. Intell. 2021, 51, 7350–7364. [Google Scholar] [CrossRef]
- Xu, L.; Cao, X.B.; Du, W.B.; Li, Y.M. Cooperative path planning optimization for multiple UAVs with communication constraints. Knowl.-Based Syst. 2023, 260, 110164. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Energy-efficient UAV routing for wireless sensor network. IEEE Trans. Veh. Technol. 2019, 69, 1741–1750. [Google Scholar] [CrossRef]
- Baumann, M.; Léonard, S.; Croft, E.A.; Little, J.J. Path planning for improved visibility using a probabilistic road map. IEEE Trans. Robot. 2010, 26, 195–200. [Google Scholar] [CrossRef]
- Kothari, M.; Postlethwaite, I. A probabilistically robust path planning algorithm for UAVs using rapidly-exploring random trees. J. Intell. Robot. Syst. 2013, 71, 231–253. [Google Scholar] [CrossRef]
- Liu, X.H.; Zhang, D.G.; Zhang, T.; Cui, Y.Y.; Chen, L.; Liu, S. Novel best path selection approach based on hybrid improved A* algorithm and reinforcement learning. Appl. Intell. 2021, 51, 9015–9029. [Google Scholar] [CrossRef]
- Silva Arantes, J.; Silva Arantes, M.; Motta Toledo, C.F.; Trindade Júnior, O.; Williams, B.C. Heuristic and genetic algorithm approaches for UAV path planning under critical situation. Int. J. Artif. Intell. Tools 2017, 26, 1760008. [Google Scholar] [CrossRef]
- Gao, C.; Zhen, Z.Y.; Gong, H.J. A self-organized search and attack algorithm for multiple unmanned aerial vehicles. Aerosp. Sci. Technol. 2016, 54, 229–240. [Google Scholar] [CrossRef]
- Shao, S.K.; Peng, Y.; He, C.L.; Du, Y. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization. ISA Trans. 2020, 97, 415–430. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, Y.Q.; Li, Z.M.; Pan, W. Grey wolf optimizer for unmanned combat aerial vehicle path planning. Adv. Eng. Softw. 2016, 99, 121–136. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Duan, H.B. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Zhao, R.X.; Wang, Y.L.; Xiao, G.; Liu, C.; Hu, P.; Li, H. A method of path planning for unmanned aerial vehicle based on the hybrid of selfish herd optimizer and particle swarm optimizer. Appl. Intell. 2022, 52, 16775–16798. [Google Scholar] [CrossRef]
- Meng, Q.; Chen, K.; Qu, Q. PPSwarm: Multi-UAV Path Planning Based on Hybrid PSO in Complex Scenarios. Drones 2024, 8, 192. [Google Scholar] [CrossRef]
- Gupta, H.; Verma, O.P. A novel hybrid Coyote-Particle Swarm Optimization Algorithm for three-dimensional constrained trajectory planning of Unmanned Aerial Vehicle. Appl. Soft Comput. 2023, 147, 110776. [Google Scholar] [CrossRef]
- Yu, Z.H.; Si, Z.J.; Li, X.B.; Wang, D.; Song, H.B. A novel hybrid particle swarm optimization algorithm for path planning of UAVs. IEEE Internet Things 2022, 9, 22547–22558. [Google Scholar] [CrossRef]
- Qu, C.Z.; Gai, W.D.; Zhang, J.; Zhong, M.Y. A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning. Knowl.-Based Syst. 2020, 194, 105530. [Google Scholar] [CrossRef]
- Wang, J.; Wang, W.C.; Hu, X.X.; Qiu, L.; Zang, H.F. Black-winged kite algorithm: A nature-inspired meta-heuristic for solving benchmark functions and engineering problems. Artif. Intell. Rev. 2024, 57, 98. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.K.; Yue, Y.G. Heuristic optimization algorithm of black-winged kite fused with osprey and its engineering application. Biomimetics 2024, 9, 595. [Google Scholar] [CrossRef]
- Abbasi, S.; Rahmani, A.M.; Balador, A.; Sahafi, A. A fault-tolerant adaptive genetic algorithm for service scheduling in internet of vehicles. Appl. Soft Comput. 2023, 143, 110413. [Google Scholar] [CrossRef]
- Fan, J.Y.; Zhou, X. Optimization of a hybrid solar/wind/storage system with bio-generator for a household by emerging metaheuristic optimization algorithm. J. Energy Storage 2023, 73, 108967. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Wang, S.W.; Zhu, D.L.; Zhou, C.J.; Sun, G.J. Improved grey wolf algorithm based on dynamic weight and logistic mapping for safe path planning of UAV low-altitude penetration. J. Supercomput. 2024, 80, 25818–25852. [Google Scholar] [CrossRef]
- Miao, Z.M.; Yuan, X.F.; Zhou, F.Y.; Qiu, X.J.; Song, Y.; Chen, K. Grey wolf optimizer with an enhanced hierarchy and its application to the wireless sensor network coverage optimization problem. Appl. Soft Comput. 2020, 96, 106602. [Google Scholar] [CrossRef]
- Yu, X.B.; Wu, X.J. Ensemble grey wolf Optimizer and its application for image segmentation. Expert. Syst. Appl. 2022, 209, 118267. [Google Scholar] [CrossRef]
- Wang, Z.D.; Dai, D.H.; Zeng, Z.Y.; He, D.J.; Chan, S. Multi-strategy enhanced Grey Wolf Optimizer for global optimization and real world problems. Cluster Comput. 2024, 27, 10671–10715. [Google Scholar] [CrossRef]
- Tu, Q.; Chen, X.C.; Liu, X.C. Multi-strategy ensemble grey wolf optimizer and its application to feature selection. Appl. Soft Comput. 2019, 76, 16–30. [Google Scholar] [CrossRef]
- Preeti; Deep, K. A random walk Grey wolf optimizer based on dispersion factor for feature selection on chronic disease prediction. Expert Syst. Appl. 2022, 206, 117864. [Google Scholar] [CrossRef]
- Dereli, S. A new modified grey wolf optimization algorithm proposal for a fundamental engineering problem in robotics. Neural Comput. Appl. 2021, 33, 14119–14131. [Google Scholar] [CrossRef]
- Amirsadri, S.; Mousavirad, S.J.; Ebrahimpour-Komleh, H. A Levy flight-based grey wolf optimizer combined with back-propagation algorithm for neural network training. Neural Comput. Appl. 2018, 30, 3707–3720. [Google Scholar] [CrossRef]
- Zhang, X.M.; Lin, Q.Y.; Mao, W.T.; Liu, S.W.; Dou, Z.; Liu, G.Q. Hybrid Particle Swarm and Grey Wolf Optimizer and its application to clustering optimization. Appl. Soft Comput. 2021, 101, 107061. [Google Scholar] [CrossRef]
- Tu, B.B.; Wang, F.; Huo, Y.; Wang, X.T. A hybrid algorithm of grey wolf optimizer and harris hawks optimization for solving global optimization problems with improved convergence performance. Sci. Rep. 2023, 13, 22909. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.B.; Jiang, N.J.; Wang, X.M.; Li, M.Y. A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning. Expert Syst. Appl. 2023, 215, 119327. [Google Scholar] [CrossRef]
- Qu, C.Z.; Gai, W.D.; Zhong, M.Y.; Zhang, J. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning. Appl. Soft Comput. 2020, 89, 106099. [Google Scholar] [CrossRef]
- Jiang, W.; Lyu, Y.X.; Li, Y.F.; Guo, Y.C.; Zhang, W.G. UAV path planning and collision avoidance in 3D environments based on POMPD and improved grey wolf optimizer. Aerosp. Sci. Technol. 2022, 121, 107314. [Google Scholar] [CrossRef]
- Huo, L.S.; Zhu, J.H.; Li, Z.M.; Ma, M.H. A hybrid differential symbiotic organisms search algorithm for UAV path planning. Sensors 2021, 21, 3037. [Google Scholar] [CrossRef]
- Ibrahim, R.A.; Abd Elaziz, M.; Lu, S.F. Chaotic opposition-based grey-wolf optimization algorithm based on differential evolution and disruption operator for global optimization. Expert Syst. Appl. 2018, 108, 1–27. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Obstacle | Map 1 | Map 2 | ||
|---|---|---|---|---|
| Threat Location | Height | Threat Location | Height | |
| Cylinders | (200, 720, 120) | 800 | (150, 750, 150) | 650 |
| (850, 800, 120) | 1000 | (920, 830, 135) | 650 | |
| (300, 330, 130) | 250 | (300, 350, 150) | 1000 | |
| (650, 480, 140) | 750 | (570, 580, 140) | 750 | |
| NA | NA | (830, 280, 180) | 1000 | |
| NA | NA | (650, 1020, 120) | 900 | |
| Cuboids | (650, 90)–(950, 270) | 900 | (820, 500)–(1080, 660) | 900 |
| (410, 810)–(590, 1090) | 1000 | (320, 740)–(500, 1020) | 1000 | |
| Algorithm | Parameter |
|---|---|
| DE | , |
| PSO | , |
| GWO | |
| SHOPSO | , , |
| SDPGWO | , |
| Case | Indicators | SDPGWO | SHOPSO | GWO | PSO | DE |
|---|---|---|---|---|---|---|
| Optimal | ||||||
| Worst | ||||||
| Mean | ||||||
| Std | ||||||
| Optimal | ||||||
| Worst | ||||||
| Mean | ||||||
| Std | ||||||
| Optimal | ||||||
| Worst | ||||||
| Mean | ||||||
| Std |
| Case | Indicators | SDPGWO | SHOPSO | GWO | PSO | DE |
|---|---|---|---|---|---|---|
| Path length | 1594.85 | 1621.37 | 1683.72 | 1654.28 | 1632.72 | |
| Runtime (s) | 60.78 | 72.92 | 42.48 | 48.52 | 52.37 | |
| SR (%) | 100.0 | 100.0 | 48.0 | 82.0 | 96.0 | |
| Path length | 1598.32 | 1628.36 | 1720.52 | 1673.62 | 1640.50 | |
| Runtime (s) | 65.53 | 78.29 | 48.72 | 51.50 | 55.41 | |
| SR (%) | 100.0 | 100.0 | 46.0 | 64.0 | 90.0 | |
| Path length | 1608.80 | 1630.47 | 1734.95 | 1688.26 | 1645.63 | |
| Runtime (s) | 72.37 | 85.90 | 53.73 | 56.30 | 60.05 | |
| SR (%) | 100.0 | 96.0 | 32.0 | 38.0 | 72.0 |
| NO. | Indicators | SDPGWO | SHOPSO | GWO | PSO | DE |
|---|---|---|---|---|---|---|
| 1 | Optimal | |||||
| 2 | Worst | |||||
| 3 | Mean | |||||
| 4 | Std | 6.9936 | 12.3943 | 27.5461 | 44.0027 | 32.3388 |
| 5 | Path length | 1612.48 | 1653.29 | 1783.50 | 1773.81 | 1688.23 |
| 6 | Runtime (s) | 92.36 | 95.38 | 74.62 | 78.27 | 81.34 |
| 7 | SR (%) | 98.0 | 90.0 | 28.0 | 34.0 | 62.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, L.; Liu, H.; He, R.; Jia, W.; Sun, W. A Novel HGW Optimizer with Enhanced Differential Perturbation for Efficient 3D UAV Path Planning. Drones 2025, 9, 212. https://doi.org/10.3390/drones9030212
Lv L, Liu H, He R, Jia W, Sun W. A Novel HGW Optimizer with Enhanced Differential Perturbation for Efficient 3D UAV Path Planning. Drones. 2025; 9(3):212. https://doi.org/10.3390/drones9030212
Chicago/Turabian StyleLv, Lei, Hongjuan Liu, Ruofei He, Wei Jia, and Wei Sun. 2025. "A Novel HGW Optimizer with Enhanced Differential Perturbation for Efficient 3D UAV Path Planning" Drones 9, no. 3: 212. https://doi.org/10.3390/drones9030212
APA StyleLv, L., Liu, H., He, R., Jia, W., & Sun, W. (2025). A Novel HGW Optimizer with Enhanced Differential Perturbation for Efficient 3D UAV Path Planning. Drones, 9(3), 212. https://doi.org/10.3390/drones9030212