In order to increase the likelihood of exchanging and transmitting information from/to moving objects (including USV) that do not have guaranteed connections to the Internet or to a control station, usually in typical routers with several external WAN channels, in small networks, the following three solutions (either their complete or limited combination) are used:
Although video transmission consumes the largest amount of bandwidth, control signals are prioritized to ensure operational safety and immediate responsiveness in critical scenarios.
By assessing these types of traffic, bandwidth is allocated, data flows are prioritized, and transmission protocols are optimized to ensure reliable USV performance and mission success. Critical data streams, such as control signals and telemetry, are prioritized due to their impact on operational stability, while video transmission is managed to prevent network congestion.
3.1. Evaluation of Traffic Generation from Devices to the Internet
Experimental results indicate that, in Roaming mode, the Starlink upload speed varies between 4 and 6 Mbps under good environmental conditions. It is necessary to adjust settings so that Upload stream from video cameras, on average, is not higher than 4 Mbps. Modern IP-video cameras have a resolution of 2 Mpx and above and form multiple streams of video transmission at the same time. However, in most cameras, there are settings that reduce the resolution of the main stream to 1 Mpx (
Table 5).
The results confirm that the proposed hybrid system provides an optimal balance between communication range, transmission stability, and bandwidth while minimizing packet loss and latency.
During the experiments, it was found that the quality acceptable for the operator was achieved by transmitting video images from a moving USV at a frame rate of 12 to 15 frames per second, with a resolution ranging from 640 × 480 to 1280 × 720 pixels. Evaluate the traffic generated by IP cameras with the following input parameters:
Channel capacity of 3 Mbps;
The H.264 and H.265 video compression algorithms were applied based on standard camera configurations. H.264 provides broader compatibility and low computational requirements, making it suitable for real-time applications with limited processing power. In contrast, H.265 provides higher compression efficiency, reducing bandwidth consumption while maintaining video quality, making it ideal for bandwidth-constrained environments.
H.265 is preferred for traffic minimization due to its superior compression efficiency, reducing bandwidth usage by up to 50% compared to H.264 while maintaining video quality. It is known [
21] that the preference for the volume of traffic is better to give the compression protocol H.265, as it provides better compression. But when switching from channel to channel, it has been determined that the recovery time of the video transmission in the case of H.265 may be 1–2 s longer than in the case of H.264 cameras. The two cameras transmit data simultaneously over three independent channels, providing redundancy and load balancing. The following values for IP cameras are taken:
To calculate the bitrate for USV camera streams, three key parameters were taken into account: resolution, frame rate, and compression ratio. Based on these parameters, the following approximate bitrate values were used for H.265 video encoding:
Camera 1: 1280 × 720 to 1920 × 1080 resolution, main stream: 1280 × 720, 15 fps, H.265–0.7 Mbps per camera; Secondary stream: 640 × 480, 10 fps, H.265–0.3 Mbps per camera;
Camera 2: 640 × 480 resolution, main stream: 640 × 480, 15 fps, H.265–0.4 Mbps.
Total bitrate calculation:
Main stream (2 cameras): 1280 × 720, 15 fps = 0.7 Mbps × 2 = 1.4 Mbps;
Secondary stream (2 cameras): 640 × 480, 10 frames per second = 0.3 Mbps × 2 = 0.6 Mbps;
Primary stream (1 camera): 640 × 480, 15 frames per second = 0.4 Mbps;
Total cumulative bitrate: 1.4 Mbps + 0.6 Mbps + 0.4 Mbps = 2.4 Mbps.
The required bandwidth for OpenVPN transmission was calculated as 2.6 Mbps = 1.08 × 2.4 Mbps, ensuring sufficient capacity for video data streams. The selection of cameras and their configuration directly impact bandwidth requirements. In our setup, adaptive encoding dynamically adjusts stream quality to optimize performance under varying network conditions.
This calculation ensures efficient bandwidth allocation while maintaining high video quality for mission-critical operations. The overhead costs of data transmission were calculated. We used encryption (encapsulation) of video traffic through a VPN tunnel. This gives overhead in the range from 4 to 10%, depending on the type of VPN protocol. Note that the WireGuard VPN protocol adds headers to each data pack of 60–80 bytes. Thus, if necessary, in a standard data package of 1500 bytes, we have a payload of 1420 bytes and the Wireguard protocol encryption overhead is 80/1420 × 100 = 5.6%.
For the OpenVPN VPN protocol, we have the following. OpenVPN header—60–80 bytes, AES encryption header—16 bytes, Message Authentication code—16 bytes. Total 112 bytes. The payload is 1388 bytes and the OpenVPN encryption overhead is 112/1388 × 100 = 8%.
3.2. Simple Option to Create a Tunnel Without Encryption
A VPN tunnel was created using a combination of protocols L2TP + GRE. The main overhead costs of this option are as follows:
Thus, the total overhead for L2TP + GRE is approximately 56–64 bytes. The remaining payload is 1500 − 64 = 1436 bytes. The overhead of tunnelling using the L2TP + GRE option is (64/1436) = 0.044 × 100% = 4.4%, and in general, we obtain a speed of 2.4 Mbps × 1.08 = 2.6 Mbps.
With selected resolutions and settings from three IP cameras and using H.265 video compression protocol, the expected total transmission flow will be up to three Mbps, which is required to solve the problem of creating the system.
If H.264 video streaming compression is used, the video transfer traffic is about 30% higher than H.265. In the course of the experiments, recommendations on the use of RTCP video data stream and minimizing the size of the data cache in the settings of the media player were tested [
21]. The disadvantage of this option is that in practice, after changing and switching data channels, a constant part of the lag of the video image is obtained.
Table 6 contains the standards of mobile network data transmission, which are present in Ukraine.
Table 6 shows summary data of possible maximum speeds in different generations of data transmission standards of mobile operators from GSM GPRS to LTE [
21,
22,
23].
The difference between 3 G and LTE technology, in relation to equipment, is that 3 GH technology usually uses a fixed channel width of 5 MHz, and the equipment built on LTE 4 G technology is supported by MIMO technology. Hence, it is possible to use Scalable Bandwidth and organize strip transmission channels of 5, 10, 15, and 20 MHz. If the LTE modem supports channel aggregation technology, higher data rates will be available. Thus, we define that it is permissible to use equipment that operates in standards not only of standard 4 G, but also in standards 3.5 Gta even and 3 G. The main we found during the use of RUTs was the slow switching from one type of communication channel to another type of communication channel, and the operating system of the router RUT “does not see” that the WireGuardVPN (v0.5.3) server tunnel was installed. It was determined that the industrial products of the RUT200 Teltonika Series routers, RUT500 have a long time of reconnecting the data and video communication routing [
22,
23,
24,
25]. Due to limitations of the software of the manufacturer, it is impossible to reduce the period of the Internet connection check interval to less than 30 s.
The results of the research are presented based on the implementation of both dynamic and static data traffic routing protocols. These protocols were evaluated in terms of their effectiveness in ensuring stable communication and minimizing data transmission delays. It was found that using the default settings of a variety of routers and IP cameras resulted in transmission delays that ranged from 10 to 40 s when two IP cameras were installed on a USV.
We estimated the criticality of the video delay in the management of USVs, relative to the path passed at a constant speed (s = v × t, where s—distance travelled, m, v—speed USV, m/s, t–time delay of transmission in video image, c, from the real location of the device). At cruising speed of 40 km/h (11.1 m/s), we found that for 10 s of communication delay the difference in the real location (actual position) and the feed received from the IP cameras video is more than 100 m (s = 11.1 m/s × 10 s = 111 m).
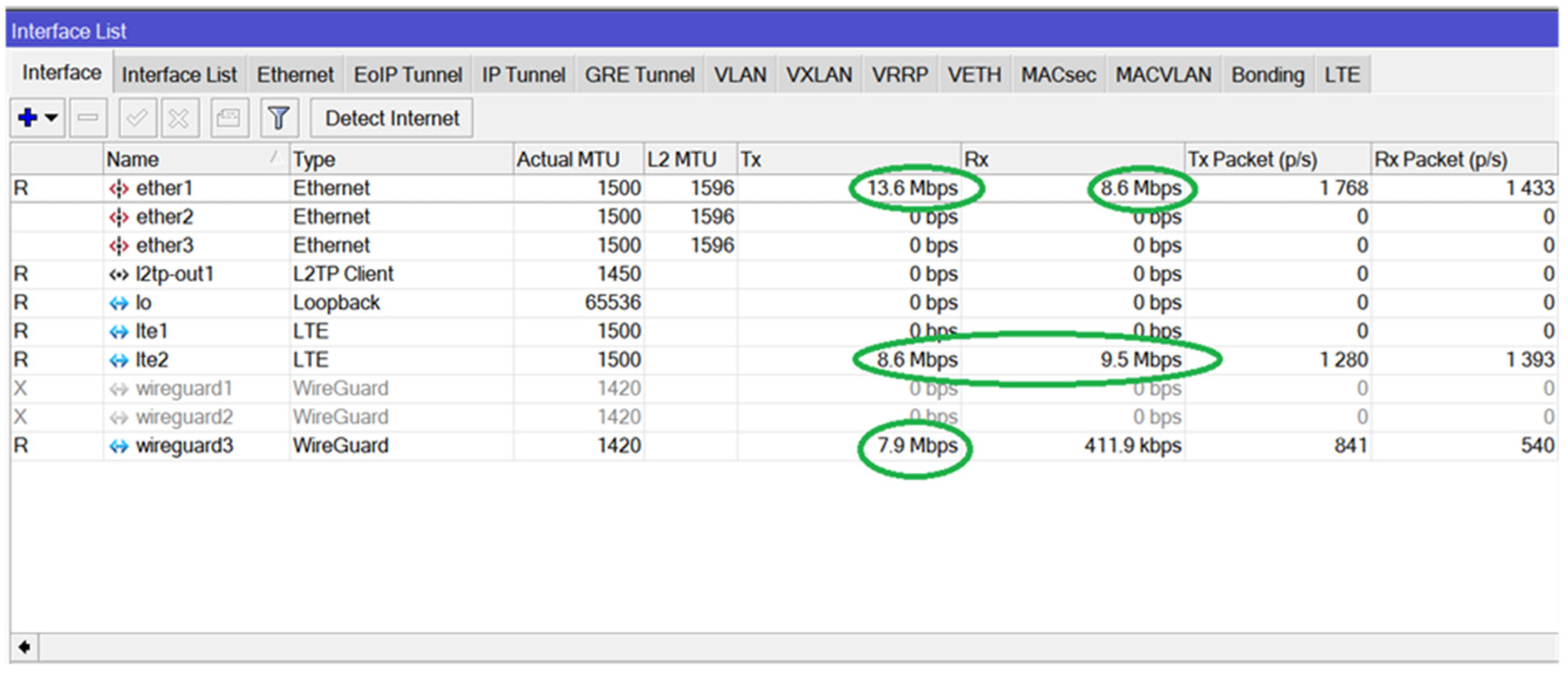
Figure 2 shows the values that are obtained without optimizing the video stream from IP cameras. As can be seen, the traffic of the LAN attainable port was 13.6 Mbps via the TX channel (sending) and 8.6 Mbps via the RX channel (receiving), and the traffic on the modem (interface) LTE2 was 8.6 Mbps by TX 9.5 Mbps by RX. During the experiments, it was also found that the Starlink moving object system (40 km/h) gives the average Upload stream speed of 4–5 Mbps. Therefore, it is necessary to assess the possibility of [
23,
24,
25,
26,
27] subsettings for those channel parameters that are available during the performance of the USV mission, that is, to make the IP-camera settings so as not to exceed the data stream of 4 Mbps.
Experiments with the study of various protocols, both dynamic routing and static routing of data traffic, showed important findings. Under conditions of situational uncertainty on unstable data transmission channels, solving the specific problem of data transmission from USV (real-time video stream from two IP cameras with minimization of video delay + telemetry) and data transmission to USV (USV management) required additional measures. These experiments highlighted the need to create a software script. This script would analyze the current situation and evaluate the performance of existing WAN channels of the selected equipment.
An algorithm for data delivery optimization was designed based on the available equipment capabilities, functionalities, and operational limitations.
Table 7 outlines the key parameters considered in algorithm development, ensuring efficient routing and adaptive traffic management.
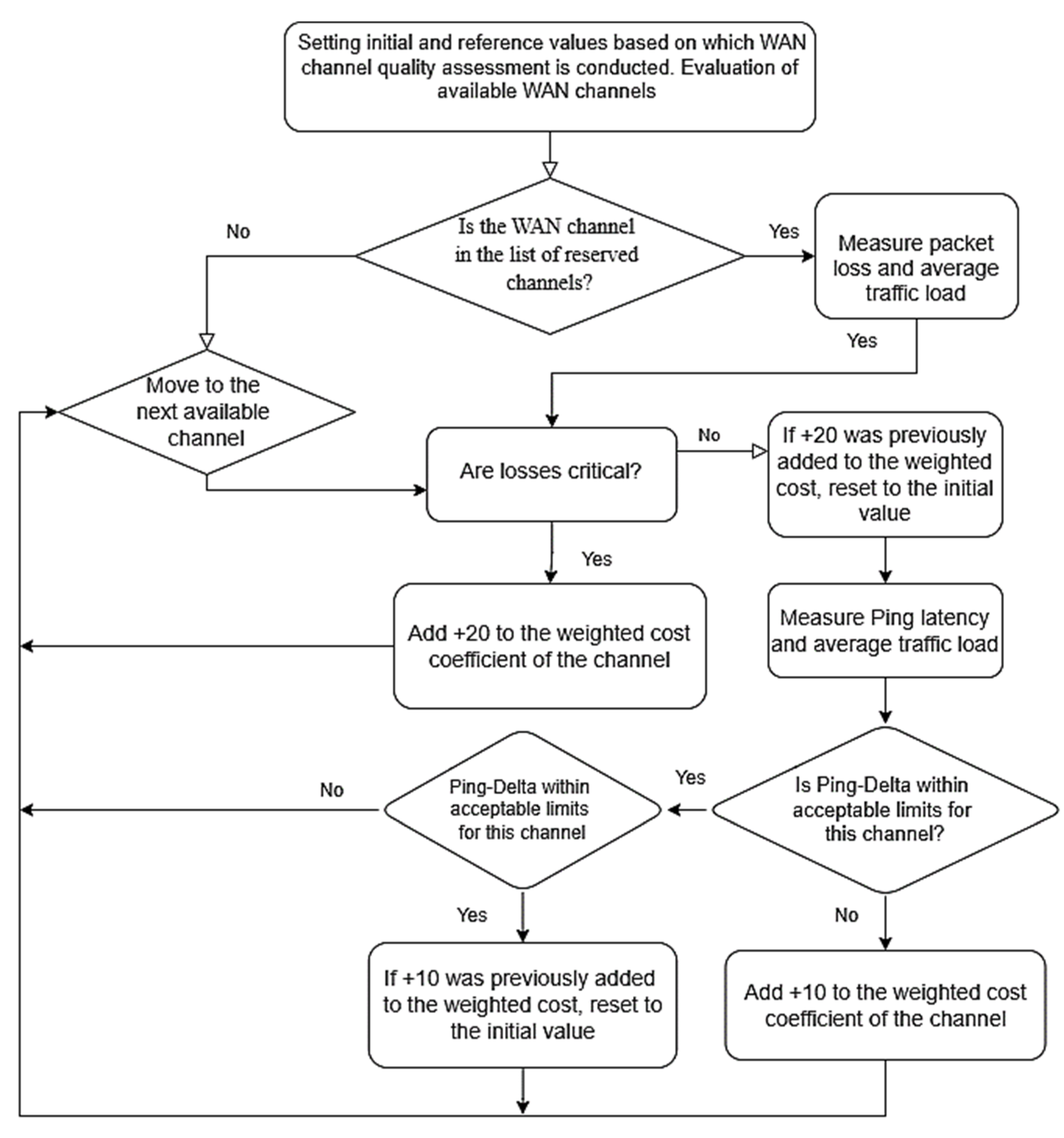
Based on the parameters listed in
Table 7, an algorithm was constructed (
Figure 3) to evaluate the data traffic passing through the external WAN channel of the router by continuously monitoring key metrics such as ping delay, packet loss rate, and channel availability. Initial weight coefficients are assigned to each WAN channel based on predefined performance criteria. The algorithm measures ping delay and packet loss, assesses channel availability and applies penalties if thresholds are exceeded. The channel with the lowest weighted score is selected for primary data transmission, with automatic switching if instability is detected. Weight coefficients are reset if the channel’s performance improves and stabilizes within acceptable limits.
The algorithm involves the following commands and parameters: the initial priority of using a WAN channel, the current ping value (delay signal in the channel), the average reported ping value, the permissible short-term deviation from the ping value, which is equal to delta-ping (delta-tolerance) or, the total number of packets in the current WAN-channel measurement cycle, the allowable number of packet losses in the WAN-channel, the time of the period of blocking one of the services when the parameters of all available channels exceed the permissible parameters, including or excluding the WAN-channel into the quality measurement cycle [
25,
26]. The simplified code to explain the work of the proposed algorithm is as follows:
Thus, the initial static routing weights will be adjusted depending on the current characteristics of the channels, which gives a more efficient control over the routing of traffic. The penalty values (10 and 20) were chosen based on empirical testing to create a balance between channel switching sensitivity and stability. Lower values led to slower reactions, while higher values caused excessive switching.
This simple algorithm allows dynamic adjustment of load coefficients of routes depending on the current characteristics of the channels, ensuring a higher priority use of channels with less packet loss and delays.
In the full script, taking into account the hysteresis (delta)—value of the delay ring, and return the initial weighting coefficients of routing the channel if the channel meets the specified initial requirements (for delay of data passage and packet loss). Only a subset of the proposed methods has been implemented in this iteration. The ’full script’ refers to the complete automation framework, which includes additional optimization modules not yet deployed.
One critical aspect of USV communication is security. As cyber threats in maritime networks increase, our system integrates encrypted VPN tunnels and dynamic firewall policies to prevent unauthorized access. Future work will explore AI-based anomaly detection for real-time cyber threat mitigation.
Implementation of the proposed algorithm, according to the block of the decision-making scheme, is made using a software script for analyzing the states of WAN-channels based on the rules of static routing for routers of the Routerboard from series manufacturer MikroTik (Rīga, Latvia).
The proposed algorithm involves the methods listed below, the implementation of which is used in the full script.
Penalty Method. In this method to the target function are added penalty coefficients of violation of restrictions. In the event that the loss of packets or delay exceeds the permissible thresholds, the penalty coefficients are added to the weight of the route.
Adaptive Algorithms. These algorithms change the parameters of the system depending on the conditions. The proposed algorithm adapts the weight coefficients of the routes depending on the packet loss and delay.
Linear programming. Linear programming is often used to optimize routing in networks. The modified algorithm, although not strictly linear programming, uses linear weight changes depending on the conditions.
Heuristic Methods. Heuristic methods are often used when the exact solution is difficult or impossible to find. The proposed approach uses some heuristic elements because it uses simple rules to adjust the weight of the routes.
Quality of Service, QoS. In network technology, QoS methods are used to manage traffic priorities. The proposed algorithm resembles the approaches of QoS, where routes with better characteristics acquire greater priority.
Generalized conclusions and comparisons obtained by the results of practical experiments on data transmission are summarized in
Table 3.
The experimental results presented in
Table 3 demonstrate significant improvements in VPN performance and latency reduction. Compared to standard configurations, the proposed system achieves a 3× reduction in channel switching time and a 2× improvement in Starlink VPN delay. These findings confirm the system’s robustness in real-world USV operations under high-interference conditions. Thus, it is possible to draw general conclusions from the carried-out improvements of software, experimental, and settlement studies of communication systems with USV.
Future research will focus on AI-assisted optimization for real-time channel selection, allowing the system to dynamically adapt to changing network conditions. Machine learning models can be trained to predict packet loss trends and proactively switch to more stable channels, further improving the reliability of data transmission. In addition, the scalability of the system for different types of USV missions will be analyzed to ensure compatibility with commercial, military, and scientific applications.
Efficient data transmission for USVs in challenging environments requires addressing several critical factors, including hydrometeorological conditions, energy consumption, and communication reliability. Multiple aspects critical in the domain such as hydrometeorological situations, energy demands, and assurance of communication reliability, need to be thoroughly reviewed for efficient data transmission for unmanned surface vehicles (USVs) operating under all these conditions. The results of related studies will become part of the considerations for establishing highly reliable hybrid communication channels. Adaptability of the environment: energy efficiency and reliability of communication are the main aspects for enhancing the communication systems of the USV. Onishchenko and Melnyk (2021) have emphasized hydrometeorological characteristics for real-time decisions [
28,
29]. For this reason, the hybrid contact systems developed should be information-based according to the methods proposed in [
30] for predicting seaworthiness. Energy efficiency has been highlighted by Volyanskaya et al. (2018) as an essential factor in autonomous systems. Multi-ship operations query the emergency transfer of information across these ships using reliable low-latency communication as highlighted in [
31,
32].
The design and development of a highly reliable hybrid data communication system for USVs under interference conditions must utilize advanced technologies and methodologies to ensure reliable communication, safety, and environmental sustainability. Sagin et al. [
33,
34,
35] in their previous studies emphasized methods by which the environmental and operational reliability of marine vessels, including the use of biofuels, can be adapted to the sustainable operation of hybrid USV power systems. Zinchenko et al. [
36,
37,
38] presented intelligent control systems associated with ship devices and solutions for ship rocking prevention, emphasizing the importance of such robust data-driven control mechanisms in terms of the marine environment.
Future improvements to USV communication systems should include methods to address safety and risk management in maritime operations. As noted by Melnyk et al. (2022), the fundamental issues of maritime safety relate to the reliable deployment of USVs [
39]. In addition, Melnyk et al. (2023) proposed an expert judgement-based approach to operational risk assessment, consistent with systematic risk assessment in complex environments [
40].
It is reasonable that the dynamic environment of USVs makes route optimization a vital factor in their operation. Xiao et al. [
41] and Huang et al. [
42] proposed ways in which route optimization can benefit from local weather routing and adverse sea conditions avoidance, aspects that can be immediately borrowed as inputs for real-time path planning, as it is an integral part of USV operations in an interference-resistant environment. Continuous and secure data transmission is one of the biggest obstacles. Harish et al. [
43] presented an exhaustive review article covering the last decade of maritime cybersecurity that emphasizes how important it is to protect communication links from cyber-attacks in hybrid systems.
Thus, to ensure the stability of data transmission, our system uses adaptive channel management algorithms. They analyze the environment parameters and dynamically select the optimal channel (acoustic, optical, or radio wave), minimizing the impact of interference. Importantly, the system balances the load between technologies by switching depending on the communication conditions, which allows us to maintain a stable data flow even in the presence of significant external interference.
Building on these foundations, the proposed system will utilize robust data communication protocols with real-time environmental monitoring and secure communication links to maximize the reliability and performance of USVs in harsh maritime environments.



 ,
, 



{kind=link}
{kind=link}
{kind=link}