1. Introduction
The trajectory tracking of quadcopters remains a significant challenge due to their underactuated nature and complex dynamics. Researchers are increasingly focusing on designing controllers that can effectively manage these complexities to improve trajectory-tracking performance. Despite the challenges of underactuated systems, the simplified configurations, energy efficiency, agility, and versatility of quadcopters make them essential in various applications such as education [
1], mapping and data collection [
2,
3], search and rescue operations [
4,
5], agricultural practices [
6,
7], military operations [
8], and disaster response [
9,
10]. The widespread interest in quadcopters within the UAV research domain is driven by their simple design, ease of operation, robustness, and compact size. However, the nonlinear dynamics of quadcopters, influenced by aerodynamics, complicate the development of accurate trajectory-tracking control.
To address the trajectory-tracking control of quadcopter drones, various control techniques have been explored by researchers, each aiming to enhance performance and robustness in dynamic environments. For instance, in [
11], the authors implemented a PID-based control scheme to regulate both the altitude and attitude of the quadrotor. A more advanced approach is presented in [
12], where a quaternion-based tracking controller, utilizing the pseudo-linear feedback linearization method, was proposed for the attitude and altitude regulation of quadrotor drones. In another study, ref. [
13] introduced physics-informed neural networks for estimating UAV dynamic models, effectively addressing uncertain data, non-linearities, and noise. Once trained, their neural network provides robust control with fast computation, eliminating the need for retraining. Furthermore, in [
14], the authors proposed an image-based visual servoing control structure for UAV target tracking, combining a sliding-mode controller for tracking and disturbance rejection with a controller to correct velocity errors due to UAV dynamics.
Among the various strategies, the sliding-mode control (SMC) technique has gained prominence for controlling the nonlinear dynamics of quadcopter drones, making it a common choice in the literature. Numerous studies have applied SMC and its advanced variants to address the challenges of quadcopter control. In [
15], the authors developed a sliding-mode control approach based on the backstepping method, effectively handling high-order nonholonomic constraints and incorporating essential physical phenomena into the dynamic model of a quadcopter. To further enhance SMC, ref. [
16] proposed an integrated control strategy, combining integral SMC and backstepping SMC within a dual-loop framework, which significantly improved trajectory-tracking accuracy. In continuation of this, ref. [
17] demonstrated the efficacy of nonlinear adaptive control through a modified adaptive SMC strategy, particularly for mini-drone quadcopters. Additionally, ref. [
18] introduced an integral adaptive SMC scheme, which ensured robustness against nonlinear dynamics and external disturbances. Further advancements were made by [
19], who integrated an adaptive super-twisting integral terminal sliding-mode control with a barrier function to address quadcopter attitude and altitude challenges. This approach was refined in [
20] with a conditioned adaptive barrier-based double-integral super-twisting SMC designed to ensure robust trajectory tracking. To further improve trajectory tracking, ref. [
21] employed a double-integral SMC approach, while ref. [
22] introduced an adaptive SMC strategy with an adaptive switching gain to achieve rapid response against parameter uncertainties and disturbances. In [
23], the authors addressed mass and inertia uncertainties using adaptive laws to compensate for input saturation, incorporating a disturbance observer to counter external disturbances. In another study [
24], the authors proposed a sliding-mode controller for quadrotor attitude, integrating adaptive fuzzy gain scheduling to mitigate chattering, along with a PD controller for position control. Similarly, in [
25], the authors introduced an adaptive distributed sliding-mode control strategy with a prescribed performance function, ensuring both transient and steady-state performance.
In addition, several researchers have explored various second-order and third-order sliding-mode control methods to further enhance the performance of quadcopters. For instance, ref. [
26] developed a second-order sliding-mode control incorporating nonholonomic constraints and employed a sigmoid function to reduce chattering, effectively addressing position and attitude tracking challenges, while ref. [
27] improved it by integrating the super-twisting algorithm, enhancing tracking accuracy. Further advancements include the work of [
28], who introduced an adaptive proportional-integral-derivative-based SMC strategy to stabilize the attitude and position of quadrotor UAVs amid parameter uncertainties and external disturbances. Similarly, ref. [
29] presented a robust adaptive second-order sliding-mode controller to enhance tracking performance for both attitude and altitude under such disturbances and uncertainties. In parallel, ref. [
30] proposed a super-twisting algorithm-based second-order SMC method for trajectory tracking and ref. [
31] introduced an improved adaptive sliding-mode control framework that integrates an adaptive switching gain for rapid adaptation and robustness against external disturbances. Moreover, third-order sliding-mode control has been applied to various engineering domains. Notably, ref. [
32] proposed a novel adaptive integral terminal third-order sliding-mode control strategy for motion tracking in piezoelectric-driven nano-positioning systems, while ref. [
33] utilized a third-order sliding-mode control based on a super-twisting algorithm for trajectory tracking in quadcopters. These contributions collectively demonstrate the ongoing development and versatility of sliding-mode control techniques in addressing complex control challenges, particularly in the context of quadcopter trajectory tracking.
Furthermore, recent studies have widely applied fractional-order sliding-mode control (FOSMC) techniques to enhance the performance of quadrotor systems. For instance, in [
34], the authors proposed a FOSMC method specifically designed for fractional-order quadrotor systems, aiming to improve system stability and control accuracy. Similarly, in [
35], a fractional-order sliding-mode control approach was introduced to address disturbances in quadrotor systems, just as in [
36], where the author designed a proportional-derivative sliding-mode controller specifically to handle disturbances in a quadrotor system. This approach incorporates an adaptive strategy to estimate disturbance bounds, which significantly contributes to the robustness of the system. Additionally, in [
37], a robust fractional-order sliding-mode control method was developed for quadrotor tracking under external disturbances, with the added objective of stabilizing the attached slung load system.
Additionally, several surveys have been conducted on control strategies for quadcopters, as detailed in [
38], providing an overview of various approaches implemented for system control. Among these, sliding-mode control (SMC) techniques have gained significant attention, particularly for trajectory tracking, where they have proven effective in rejecting disturbances. While SMC has been successfully applied to path following in fixed-wing UAVs, its application in quadrotor path following remains largely unexplored. Another survey by the authors in [
39] discusses recent advancements in motion control theory for multi-rotor aerial vehicles (MAVs), focusing on position and attitude control. The survey reviews control strategies for MAVs, emphasizing the importance of position and attitude controllers in ensuring stability and achieving desired movement. The authors highlight sliding-mode control as a widely researched nonlinear control method known for managing system dynamics using a discontinuous control signal that forces the system to “slide” along a trajectory. Initially proposed for attitude control, SMC has since been applied to position control, with real-world validation occurring in the past decade.
While the sliding-mode control approach is widely recognized for addressing the control challenges of quadcopters, certain aspects of the existing literature present opportunities for further enhancement. For example, several studies, including [
20,
22,
23,
30,
31,
40], employed a PD-based function to select the sliding surface, which may limit the controller flexibility. Additionally, works such as [
15,
16,
23] have developed SMC controllers without thoroughly addressing the chattering phenomenon, which could potentially impact performance under specific operational conditions. Moreover, studies such as [
15,
16,
21,
30,
31] show that there exists potential for further exploration in optimizing the gain parameters, which could lead to a more robust and efficient system performance. Furthermore, research including [
19,
20,
23] has addressed the issue of control signal saturation, an area that still presents opportunities for further investigation to enhance the performance of the controller under specific constraints. Furthermore, many of these studies primarily focus on simulation-based evaluations, with only a few, such as [
20,
40,
41], demonstrating their implementations on physical hardware or through hardware-in-the-loop (HIL) testing. This highlights valuable opportunities for advancing the design, optimization, and real-world application of quadcopter control systems.
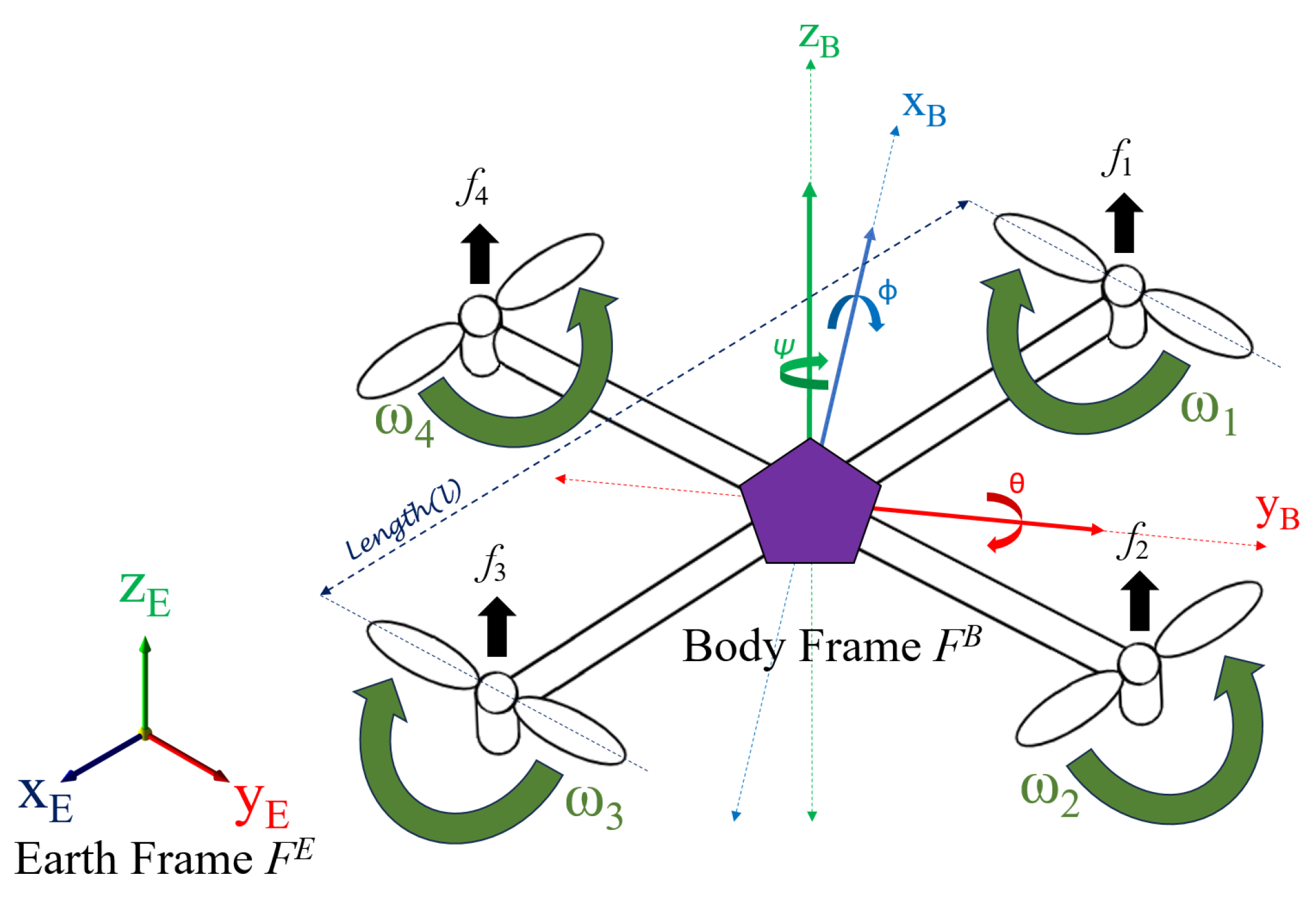
In this study, we investigate the trajectory-tracking control problem of a quadcopter and design a controller to regulate its attitude, heading, position, and altitude. The cross configuration of the quadcopter is selected for its superior maneuverability. To enhance the robustness of traditional sliding-mode control (SMC), a third-order sliding-mode controller is used, incorporating a two-stage dynamic sliding surface. This approach is particularly effective for nonlinear systems, as it offers a flexible method for handling complex dynamics. In contrast, ref. [
20] employs a simpler, single-stage sliding surface, where a PD sliding surface is used. Additionally, a barrier function is integrated to regulate excessive gain and ensure convergence to the origin. The integral terminal sliding-mode technique, in conjunction with the super-twisting reaching law, is used to mitigate chattering effects. To ensure continuous control actions, enable smoother transitions, and minimize chattering, a saturation function is used instead of the traditional signum function, as implemented in [
20]. Additionally, Particle Swarm Optimization (PSO) is used to fine-tune the controller’s gain parameters, with Integral Time Absolute Error (ITAE) as the objective function. In contrast to [
20], which uses Improved Grey Wolf Optimization (IGWO) with Integral Square Error (ISE) as the objective function, PSO with ITAE effectively minimizes both transient and steady-state errors. While ISE primarily focuses on steady-state error, it may not capture transient dynamics as effectively as ITAE.
Optimization of control strategies and the overall system is crucial for achieving optimal performance. To enhance controller performance, various optimization techniques have been employed by researchers. For instance, in [
20], an Improved Grey Wolf Optimization technique was used to fine-tune the gain parameters of the controller. In contrast, ref. [
36] employed a genetic algorithm for tuning the parameters of the controller. Meanwhile, ref. [
41] used the Redfox algorithm for the same purpose. Among the numerous optimization methods, Particle Swarm Optimization (PSO) is particularly favored for its versatility and robustness. As highlighted in [
42], PSO has been successfully applied in chemometrics for tasks such as metaparameter selection, signal warping, robust PCA, and variable selection. Similarly, ref. [
43] explored PSO as a robust solution for large-scale nonlinear problems and its applications in power systems. In [
44,
45], PSO was employed to optimize controller gain values. Additionally, in [
46], PSO was combined with an enumeration method to derive candidate chassis layout schemes for Unmanned Surface Vehicles, showcasing its adaptability across various engineering fields. Further applications of PSO include [
47], where enhanced PSO methods were applied for UAV localization in GPS-denied environments. These studies highlight the diversity of optimization techniques, with PSO standing out as a powerful tool for enhancing control system performance and efficiency.
The primary limitations of SMC-based control laws include high control gains, increased computational load, chattering effects, and control input saturation. However, these limitations can be alleviated through the utilization of advanced SMC techniques. In this study, we implement a third-order SMC approach to address the trajectory-tracking control problem, utilizing the cross configuration of the quadcopter. The key contributions of this research are as follows:
The control input is regulated near the sliding surface through the integral terminal super-twisting technique, mitigating chattering and enhancing control performance.
Dynamic selection of the sliding surface is utilized to optimize the performance of the control algorithm.
The barrier function regulates excessive gain, improves control performance and increases robustness by protecting the system from uncertainties.
The barrier function effectively adapts to variations in time-varying systems.
The saturation function promotes smoother transitions and helps reduce chattering.
Particle Swarm Optimization is employed to optimize the gain parameters, further improving the overall performance of the controller.
Table 1 provides a comparative summary of the proposed approach and existing methods, highlighting the key differences.
This article is organized as follows:
Section 2 introduces the dynamic mathematical model for the quadcopter.
Section 3 describes the design of the third-order sliding-mode control technique, including the optimization of controller gain parameters through Particle Swarm Optimization. In
Section 4, the numerical simulation results are presented, followed by a comparative analysis of control laws in
Section 5.
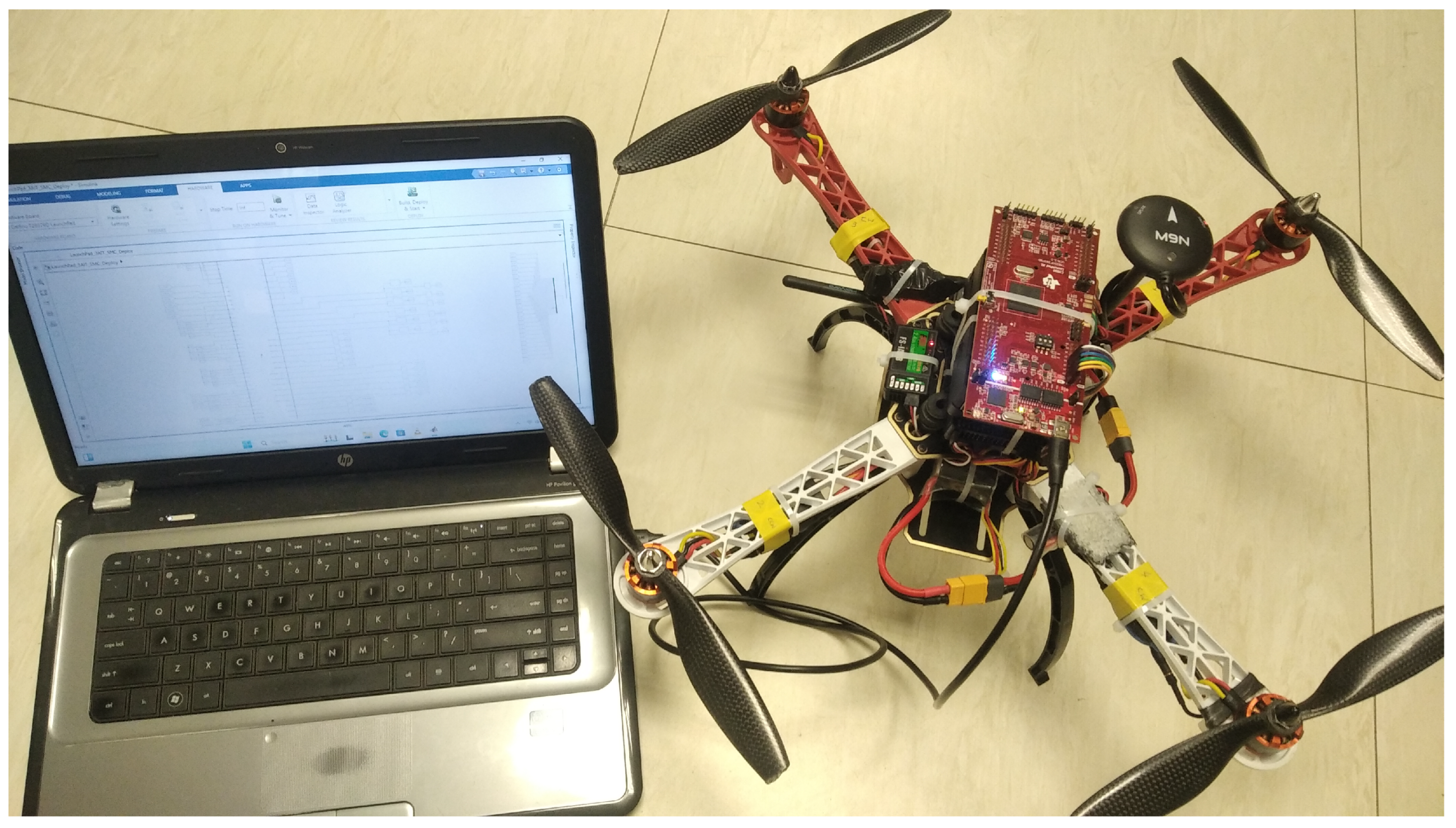
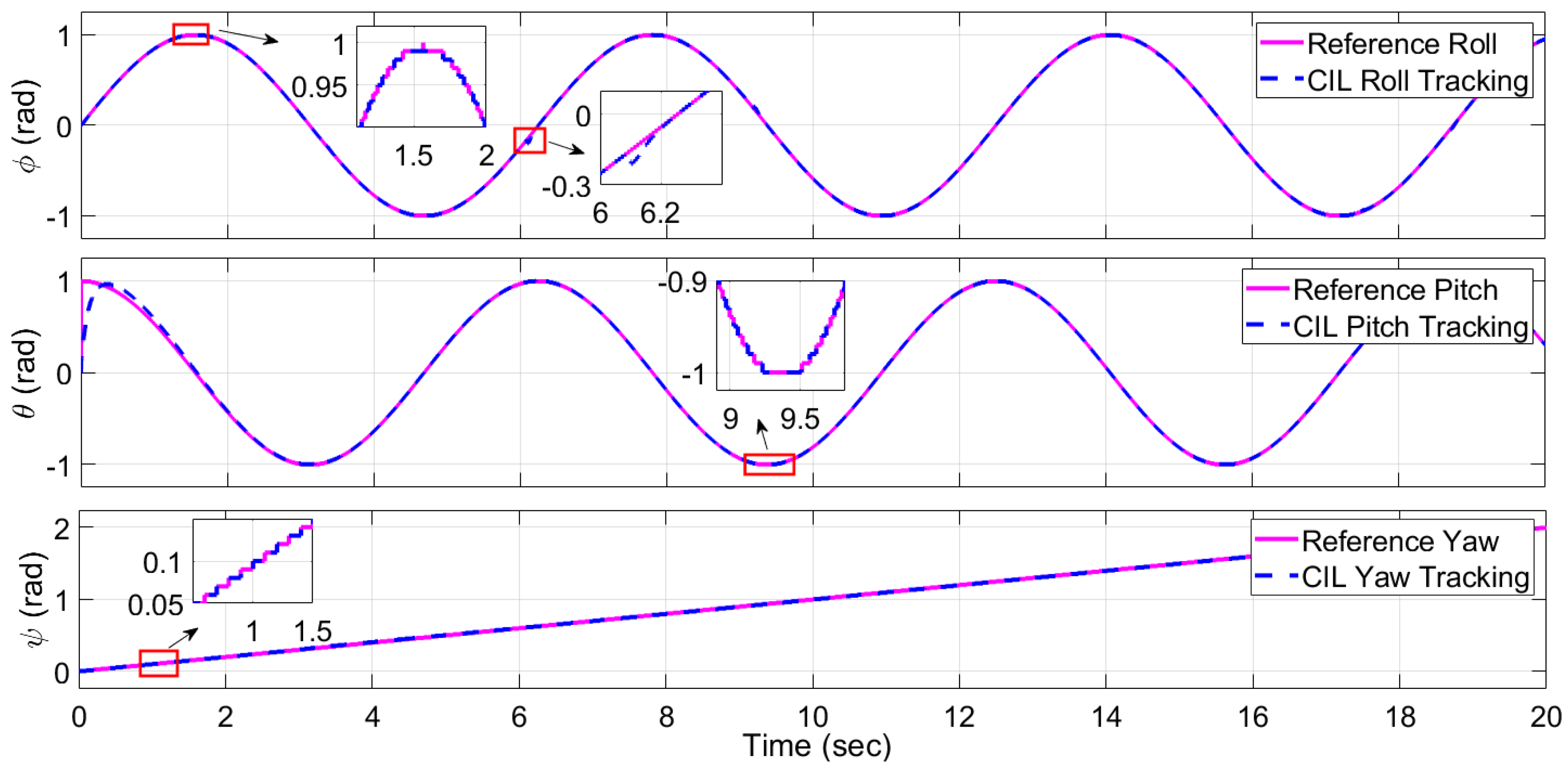
Section 6 outlines the implementation of the controller-in-the-loop experiment, and
Section 7 provides the concluding remarks of the study.



 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}