
Inland Water Quality Monitoring Using Airborne Small Cameras: Enhancing Suspended Sediment Retrieval and Mitigating Sun Glint Effects

 , ,
, ,  , and
, and 
Abstract
1. Introduction
2. Materials and Methods
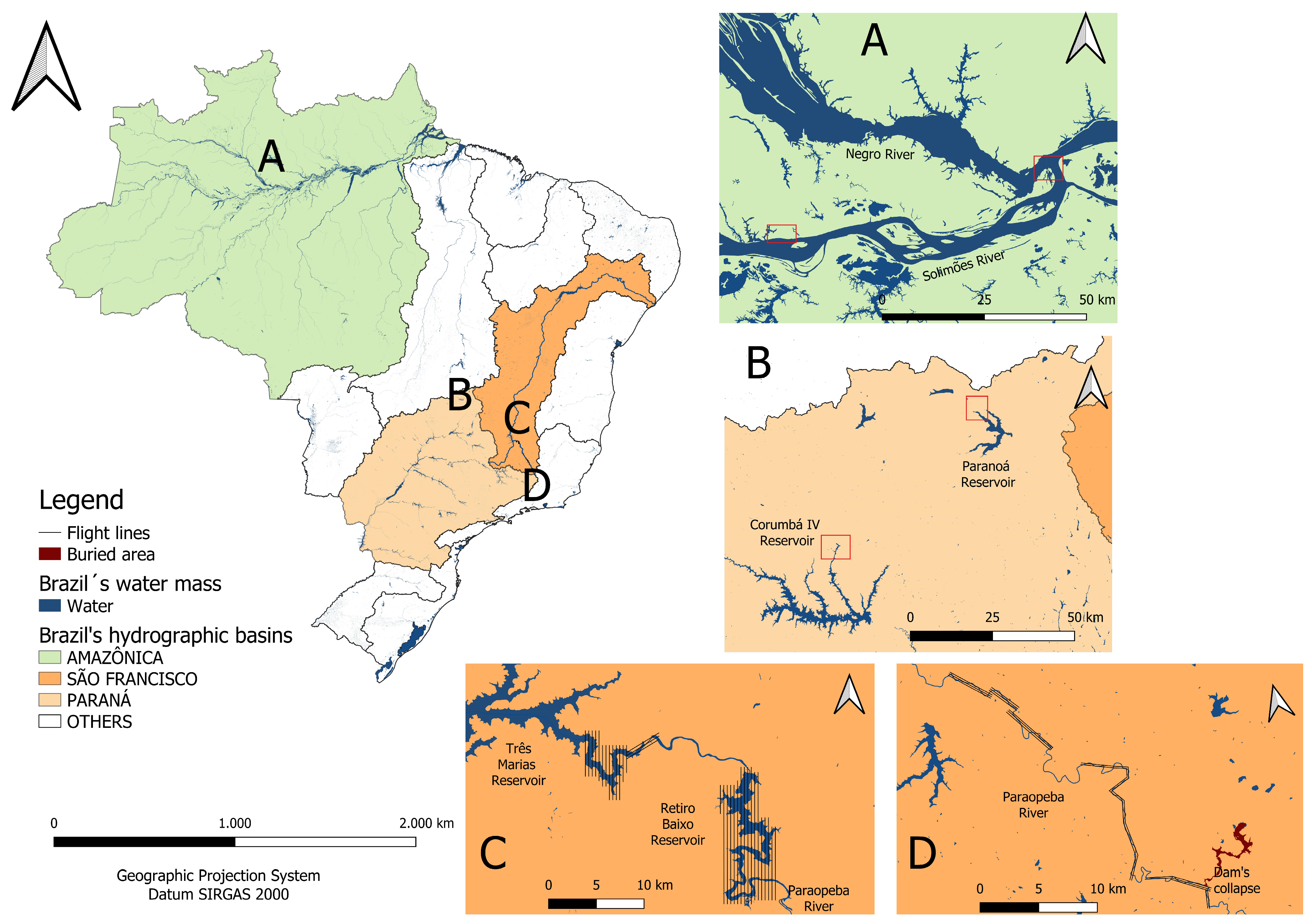
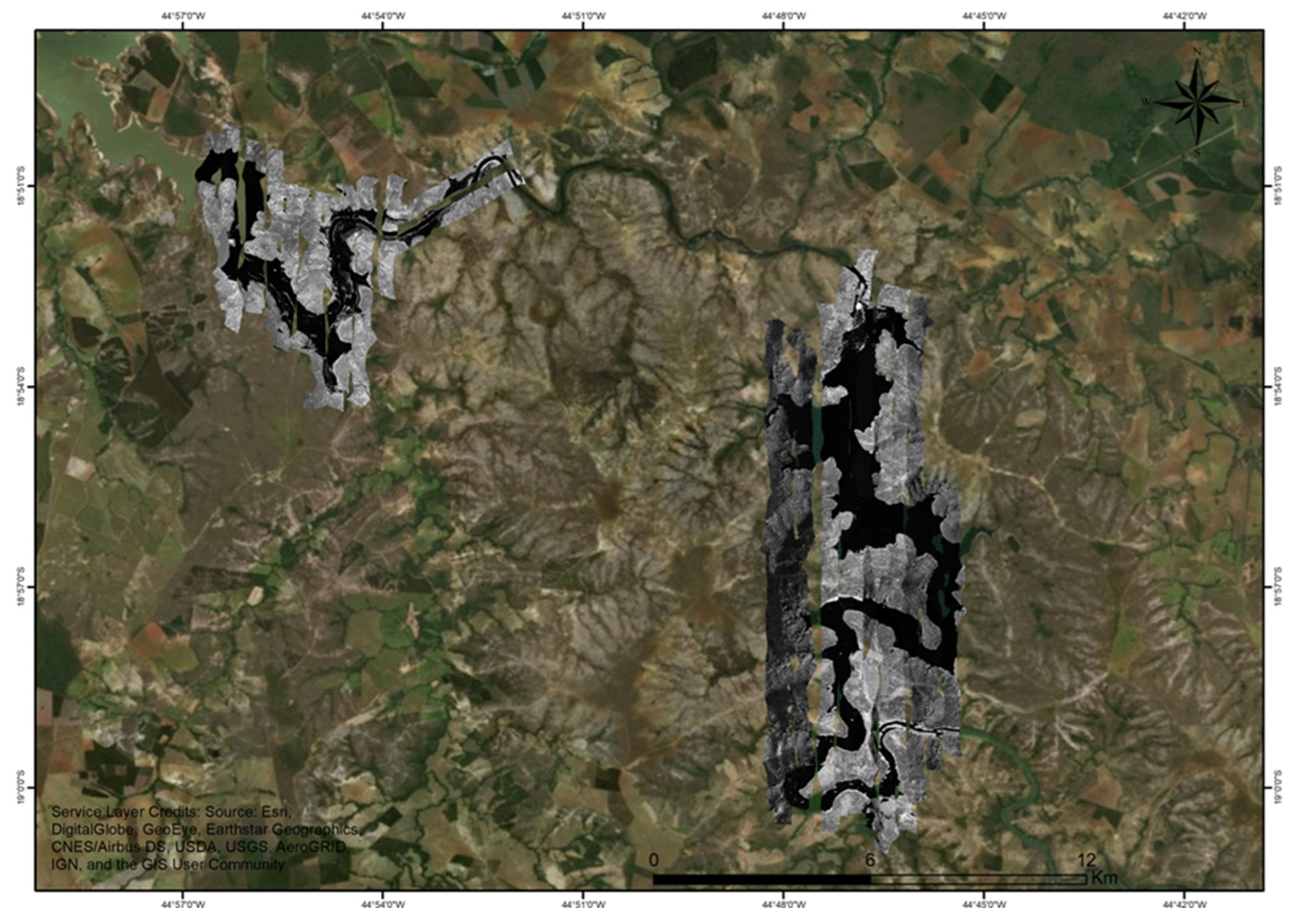
2.1. Study Area
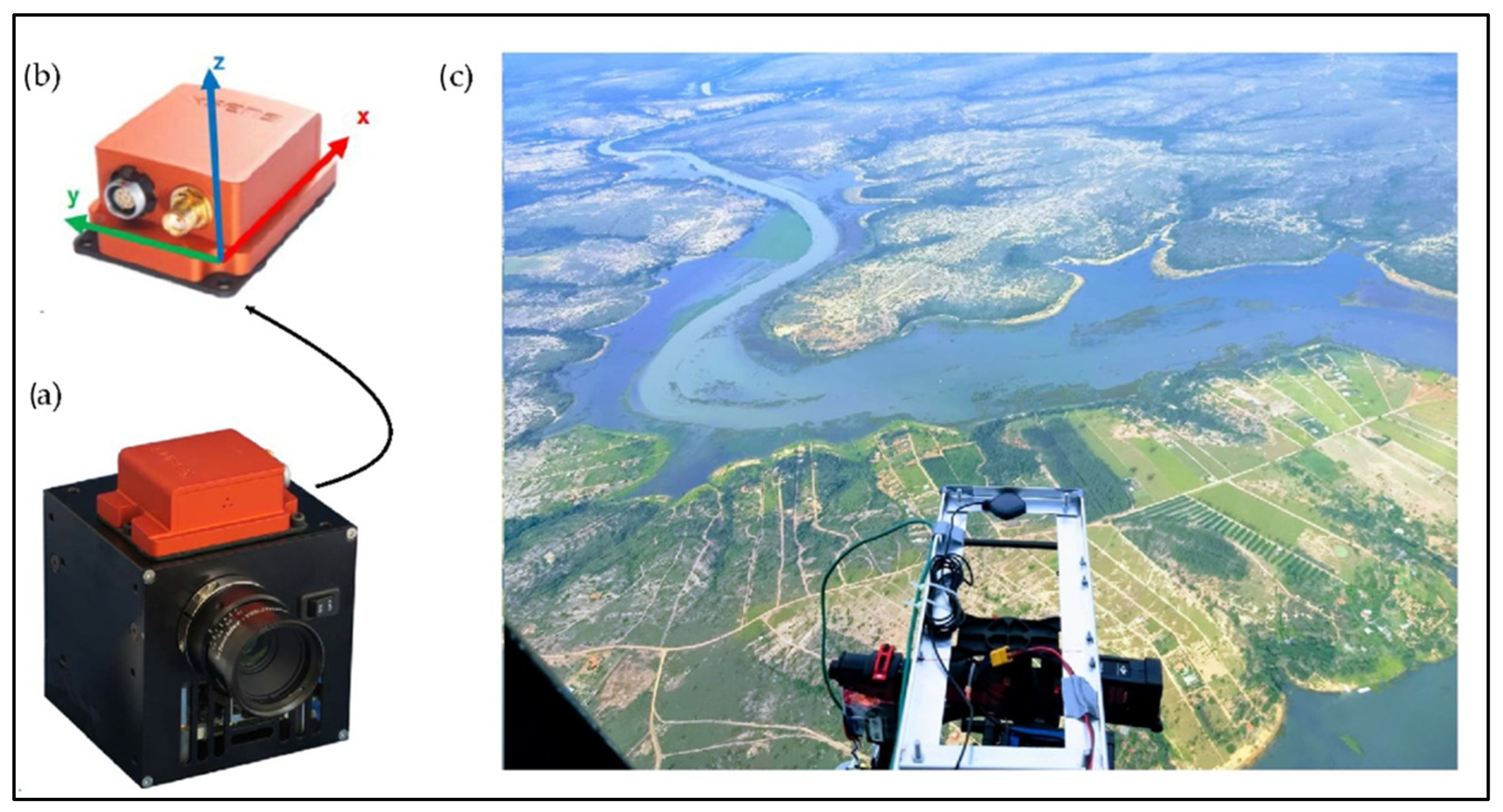
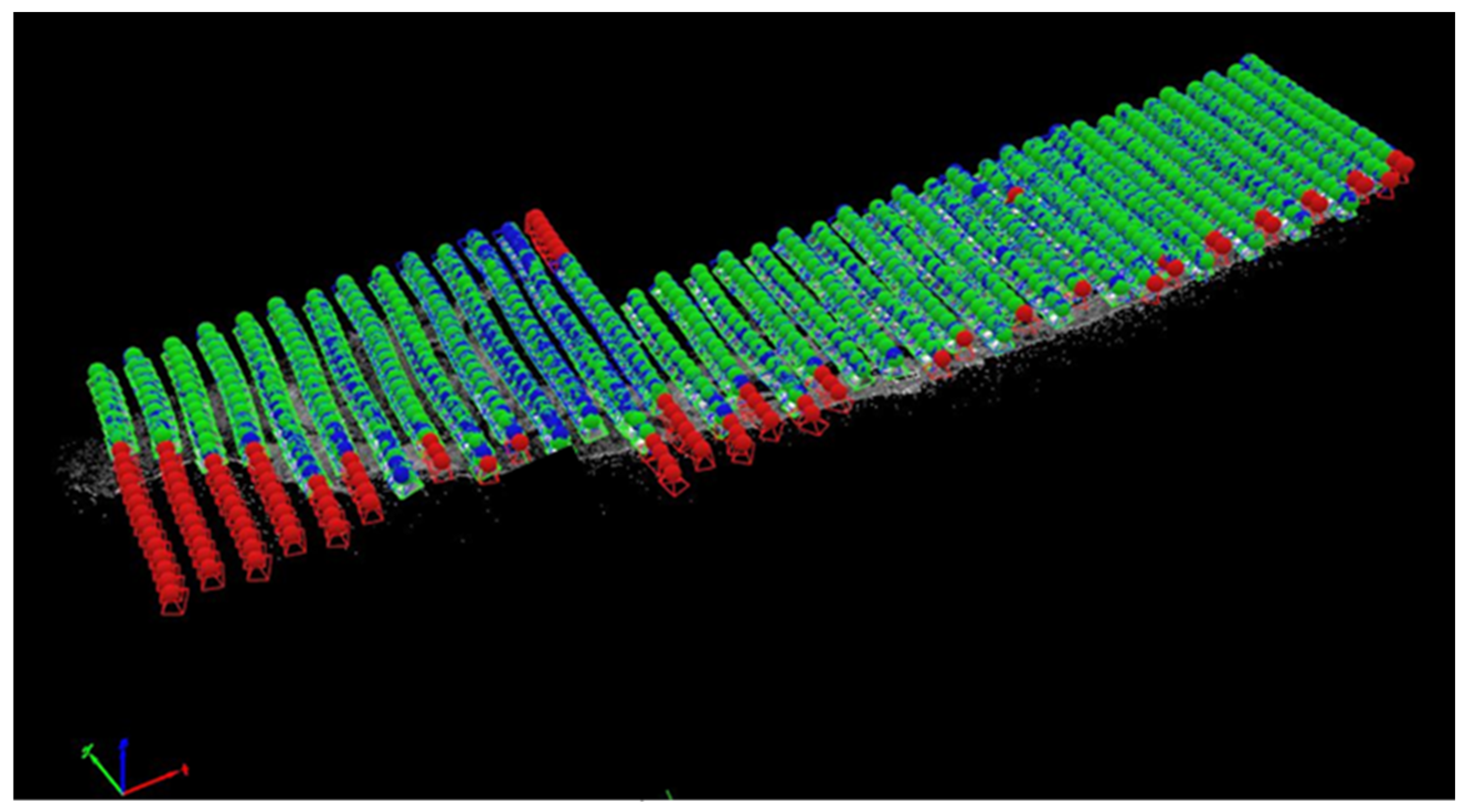
2.2. Multispectral Platform: Data Collection and Processing
2.3. Hyperspectral Platform: Data Collection and Processing
2.4. Data Collection and Analysis
3. Results and Discussion
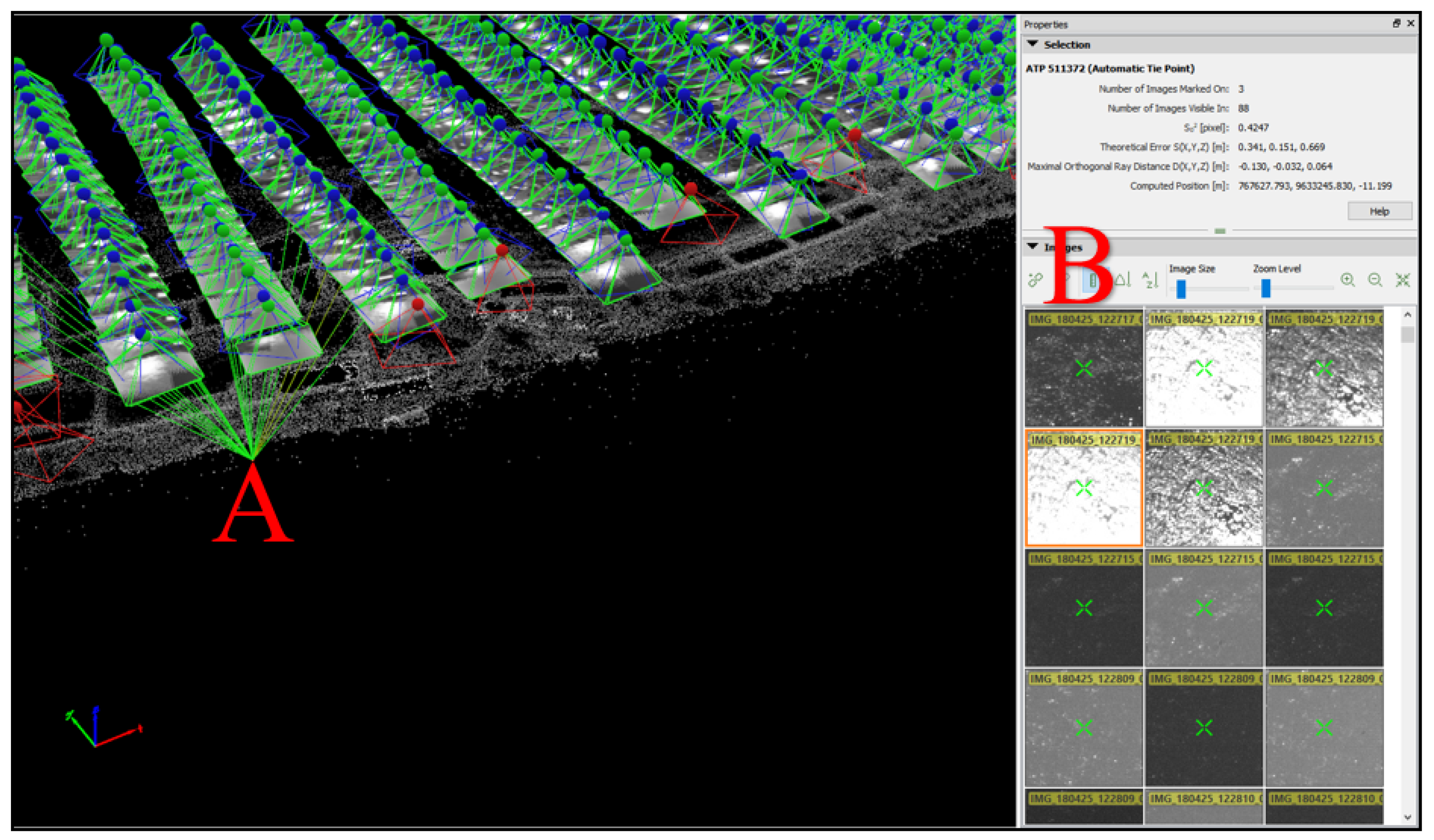
3.1. Acquisition Geometry Systems of Small Cameras: Insights into Monitoring Inland Water Quality
3.2. Sun Glint: Definition and Correction Approaches
3.3. Radiometric Accuracy and TSS Monitoring by Multispectral and Hyperspectral Cameras
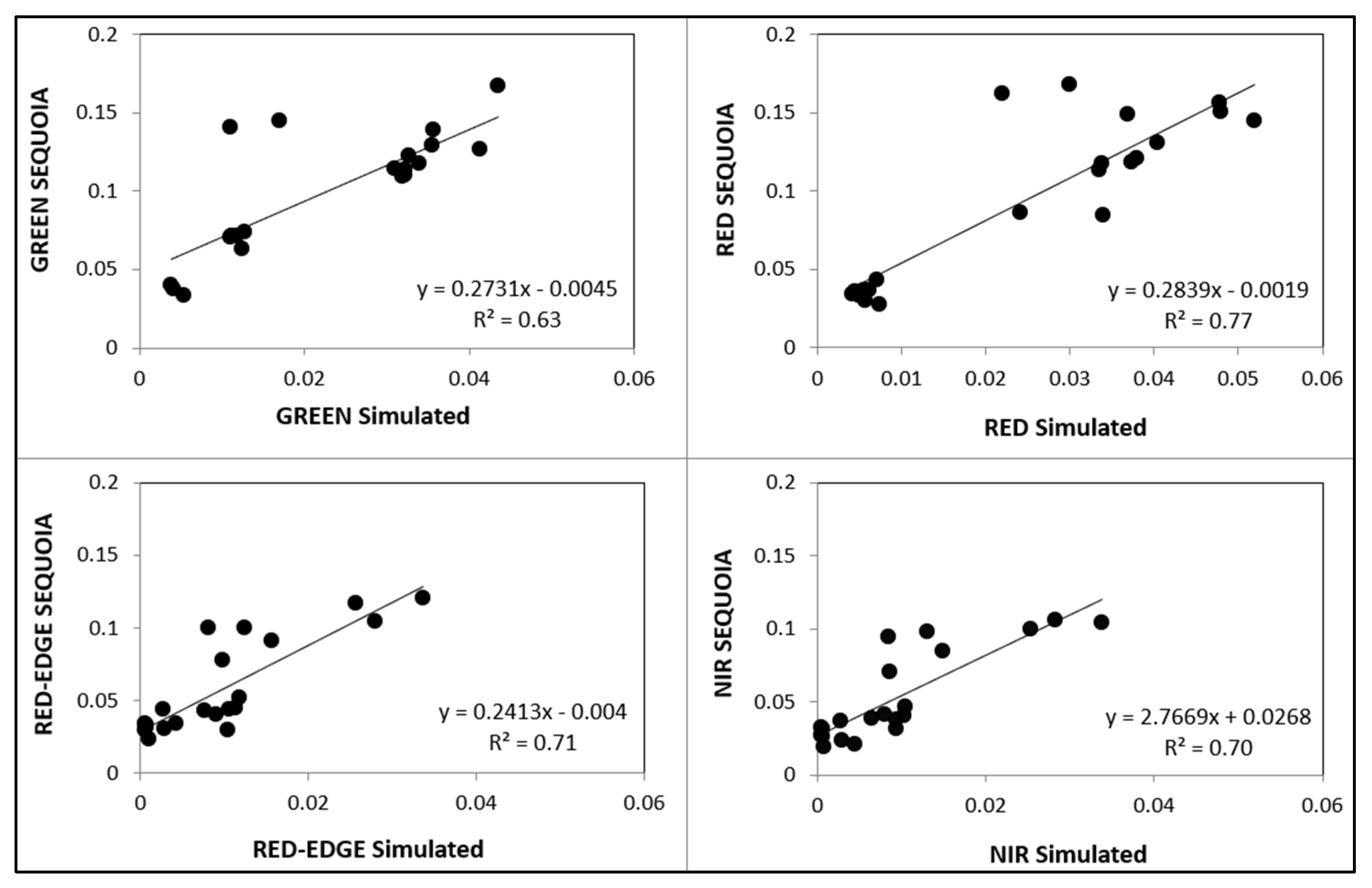
3.3.1. Multispectral Camera
3.3.2. Hyperspectral Camera
4. Final Considerations: Guidance for Mitigating Sun Glint Effects and Optimizing UAV Platforms in TSS Monitoring
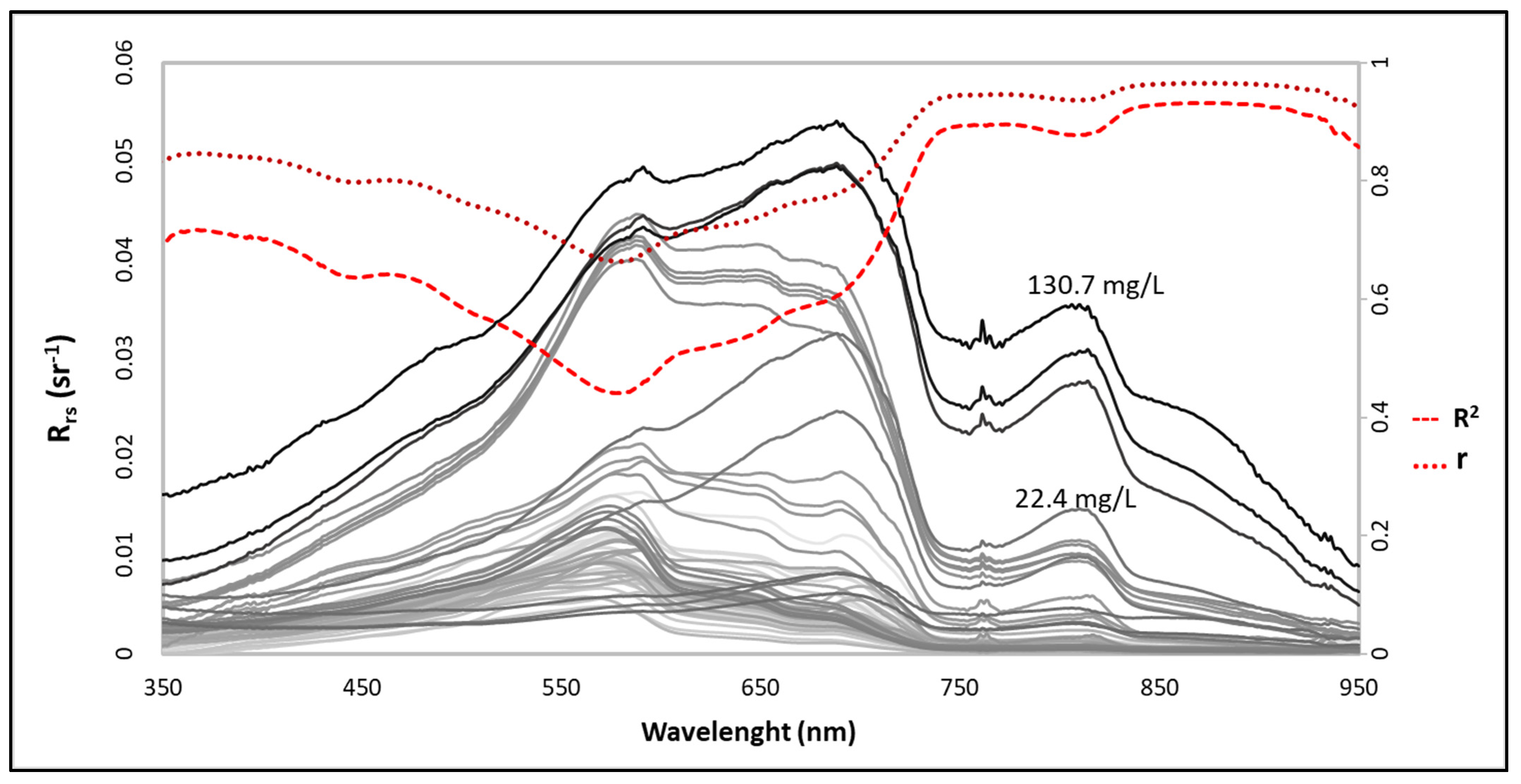
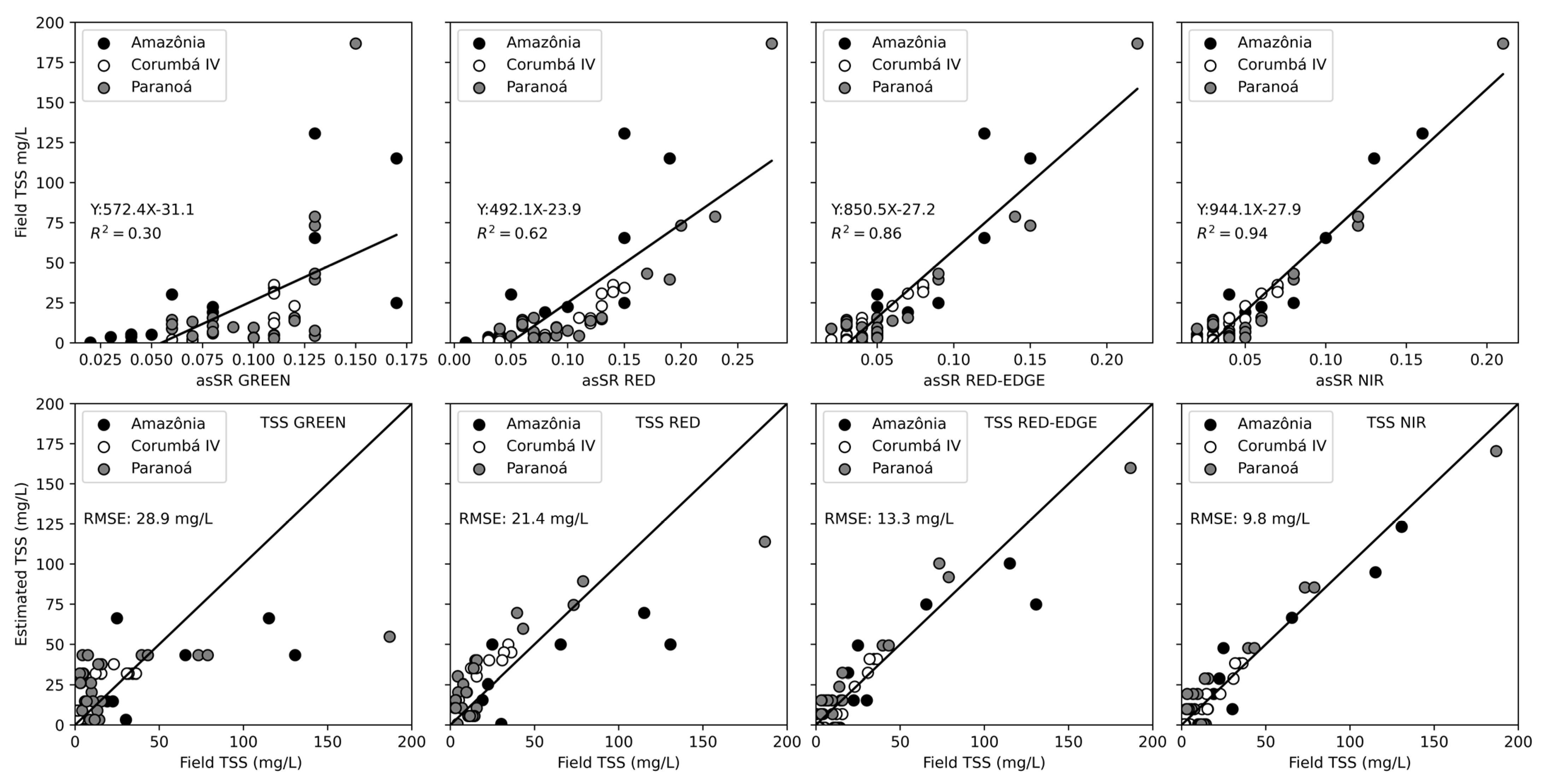
- Significant coverage of the NIR region (approximately 700–900 nm) due to its strong correlation with TSS concentrations. More precisely narrower spectral bands between 830 and 870 nm are advisable due to the high robust correlation with TSS;
- Adequate coverage of the visible spectrum, including the RED and GREEN bands, to effectively address low TSS concentrations (below 20 mg/L−1);
- Consideration of spectral bands and resolutions that address the saturation issue in cases of extremely high TSS concentrations (above 600 mg/L−1).
- (1)
- Small water bodies, primarily encompassing small to medium-sized rivers, fishponds, small water reservoirs or lakes, and specific portions of larger lakes and reservoirs like confluence areas with tributary rivers, an optimal setup involves:
- UAV Type: Multi-rotor UAVs due to their enhanced stability and safer take-off and landing capabilities over water.
- Camera Type: frame cameras are better adapted, preferably with a global shutter imaging mechanism. This choice is facilitated by the capability of digital photogrammetry software to construct orthomosaics from images captured in heterogeneous environments.
- (2)
- Large water bodies, encompassing significant rivers like the main rivers within Brazilian hydrographic basins, as well as complete or partial sections of medium to large lakes and reservoirs. The following approach is recommended:
- UAV Type: Fixed-wing UAVs provide superior autonomy compared to electric multirotor. However, they come with trade-offs such as lower stability and reduced safety during take-off and landing. Vertical Take-Off and Landing (VTOL) UAVs offer the advantage of both high flight autonomy and safe take-off and landing in multi-rotor mode. While their fixed-wing mode may have lower stability, it ensures longer flight autonomy.
- Camera Type: In cases where the camera’s FOV captures homogeneous water areas exclusively, such as those described above, the use of frame camera images with digital photogrammetry software to construct orthomosaics is not feasible. Instead, pushbroom cameras coupled with high-flying UAVs present a viable solution.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Matthews, M.W. A Current Review of Empirical Procedures of Remote Sensing in Inland and Near-Coastal Transitional Waters. Int. J. Remote Sens. 2011, 32, 6855–6899. [Google Scholar] [CrossRef]
- Dekker, A.G.; Vos, R.J.; Peters, S.W.M. Analytical Algorithms for Lake Water TSM Estimation for Retrospective Analyses of TM and SPOT Sensor Data. Int. J. Remote Sens. 2002, 23, 15–35. [Google Scholar] [CrossRef]
- Giardino, C.; Bresciani, M.; Braga, F.; Cazzaniga, I.; De Keukelaere, L.; Knaeps, E.; Brando, V.E. Bio-Optical Modeling of Total Suspended Solids. In Bio-Optical Modeling and Remote Sensing of Inland Waters; Elsevier: Amsterdam, The Netherlands, 2017; pp. 129–156. [Google Scholar]
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. A Comprehensive Review on Water Quality Parameters Estimation Using Remote Sensing Techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [PubMed]
- Dörnhöfer, K.; Oppelt, N. Remote Sensing for Lake Research and Monitoring—Recent Advances. Ecol. Indic. 2016, 64, 105–122. [Google Scholar] [CrossRef]
- Palmer, S.C.J.; Kutser, T.; Hunter, P.D. Remote Sensing of Inland Waters: Challenges, Progress and Future Directions. Remote Sens. Environ. 2015, 157, 1–8. [Google Scholar] [CrossRef]
- Olmanson, L.G.; Brezonik, P.L.; Bauer, M.E. Remote Sensing for Regional Lake Water Quality Assessment: Capabilities and Limitations of Current and Upcoming Satellite Systems. In Advances in Watershed Science and Assessment; The Handbook of Environmental Chemistry Series; Springer: Cham, Switzerland, 2015; Volume 33, pp. 111–140. [Google Scholar] [CrossRef]
- Olmanson, L.G.; Brezonik, P.L.; Bauer, M.E. Geospatial and Temporal Analysis of a 20-Year Record of Landsat-Based Water Clarity in Minnesota’s 10,000 Lakes. J. Am. Water Resour. Assoc. 2014, 50, 748–761. [Google Scholar] [CrossRef]
- Giardino, C.; Bresciani, M.; Cazzaniga, I.; Schenk, K.; Rieger, P.; Braga, F.; Matta, E.; Brando, V.E. Evaluation of Multi-Resolution Satellite Sensors for Assessing Water Quality and Bottom Depth of Lake Garda. Sensors 2014, 14, 24116–24131. [Google Scholar] [CrossRef] [PubMed]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Olson, D.; Anderson, J. Review on Unmanned Aerial Vehicles, Remote Sensors, Imagery Processing, and Their Applications in Agriculture. Agron. J. 2021, 113, 971–992. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.J.; Tiede, D.; Seifert, T. UAV-Based Forest Health Monitoring: A Systematic Review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Ramón, A.; Adán, A.; Javier Castilla, F. Thermal Point Clouds of Buildings: A Review. Energy Build. 2022, 274, 112425. [Google Scholar] [CrossRef]
- Videras Rodríguez, M.; Melgar, S.G.; Cordero, A.S.; Márquez, J.M.A. A Critical Review of Unmanned Aerial Vehicles (UAVs) Use in Architecture and Urbanism: Scientometric and Bibliometric Analysis. Appl. Sci. 2021, 11, 9966. [Google Scholar] [CrossRef]
- Stilla, U.; Xu, Y. Change Detection of Urban Objects Using 3D Point Clouds: A Review. ISPRS J. Photogramm. Remote Sens. 2023, 197, 228–255. [Google Scholar] [CrossRef]
- Dronova, I.; Kislik, C.; Dinh, Z.; Kelly, M. A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data. Drones 2021, 5, 45. [Google Scholar] [CrossRef]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in Support of Algal Bloom Research: A Review of Current Applications and Future Opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef]
- Rhee, D.S.; Kim, Y.D.; Kang, B.; Kim, D. Applications of Unmanned Aerial Vehicles in Fluvial Remote Sensing: An Overview of Recent Achievements. KSCE J. Civ. Eng. 2018, 22, 588–602. [Google Scholar] [CrossRef]
- Sibanda, M.; Mutanga, O.; Chimonyo, V.G.P.; Clulow, A.D.; Shoko, C.; Mazvimavi, D.; Dube, T.; Mabhaudhi, T. Correction: Sibanda et al. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drones 2021, 5, 84. Drones 2022, 6, 131. [Google Scholar] [CrossRef]
- Windle, A.E.; Silsbe, G.M.; Moses, W. Evaluation of unoccupied aircraft system (UAS) remote sensing reflectance retrievals for water quality monitoring in coastal waters. Front. Environ. Sci. 2021, 9, 674247. [Google Scholar] [CrossRef]
- Zeng, C.; Richardson, M.; King, D.J. The Impacts of Environmental Variables on Water Reflectance Measured Using a Lightweight Unmanned Aerial Vehicle (UAV)-Based Spectrometer System. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correctionworkflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- dos S. Vergilio, C.; Lacerda, D.; de Oliveira, B.C.V.; Sartori, E.; Campos, G.M.; de S. Pereira, A.L.; de Aguiar, D.B.; da S. Souza, T.; de Almeida, M.G.; Thompson, F.; et al. Metal Concentrations and Biological Effects from One of the Largest Mining Disasters in the World (Brumadinho, Minas Gerais, Brazil). Sci. Rep. 2020, 10, 5936. [Google Scholar] [CrossRef]
- Thompson, F.; de Oliveira, B.C.; Cordeiro, M.C.; Masi, B.P.; Rangel, T.P.; Paz, P.; Freitas, T.; Lopes, G.; Silva, B.S.; Cabral, A.S.; et al. Severe Impacts of the Brumadinho Dam Failure (Minas Gerais, Brazil) on the Water Quality of the Paraopeba River. Sci. Total Environ. 2020, 705, 135914. [Google Scholar] [CrossRef] [PubMed]
- Favre, T.C.; Fernandez, M.A.; Christina, L.; Holsbach, N.; José, R.; Souza, D.P.; Pieri, O.S.; Aparecida, S.; Thiengo, C. Assessment of schistosomiasis in the semi-arid Northeast region of Brazil: The São Francisco River large-scale water transposition project. Rev. Soc. Bras. Med. Trop. 2016, 49, 252–257. [Google Scholar] [CrossRef] [PubMed]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ Photogrammetry: A Low-Cost, Effective Tool for geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Pyo, J.C.; Kwon, Y.H.; Duan, H.; Cho, K.H.; Park, Y. Drone-Based Hyperspectral Remote Sensing of Cyanobacteria Using Vertical Cumulative Pigment Concentration in a Deep Reservoir. Remote Sens. Environ. 2020, 236, 111517. [Google Scholar] [CrossRef]
- Vydhyanathan, A.; Bellusci, G. XSens Mti-G White Paper: The Next Generation Xsens Motion Trackers for Industrial Applications. Xsens: Enschede, The Netherlands, 2018; pp. 1–10. [Google Scholar]
- Smith, G.M.; Milton, E.J. The Use of the Empirical Line Method to Calibrate Remotely Sensed Data to Reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662. [Google Scholar] [CrossRef]
- Mobley, C.D. Estimation of the Remote-Sensing Reflectance from above-Surface Measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef]
- Martinez, J.; Espinoza-Villar, R.; Armijos, E.; Moreira, L.S. The optical properties of river and floodplain waters in the Amazon River Basin: Implications for satellite-based measurements of suspended particulate matter. J. Geophys. Res. Earth Surf. 2015, 120, 1274–1287. [Google Scholar] [CrossRef]
- APHA—Association American Public Health. Standard Methods for the Examination of Water and Wastewater; Rice, E.W., Bridgewater, L., American Public Health Association, Eds.; American Public Health Association: Washington, DC, USA, 2012. [Google Scholar]
- Shang, S.; Lee, Z.; Lin, G.; Hu, C.; Shi, L.; Zhang, Y.; Li, X.; Wu, J.; Yan, J. Sensing an Intense Phytoplankton Bloom in the Western Taiwan Strait from Radiometric Measurements on a UAV. Remote Sens. Environ. 2017, 198, 85–94. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; López-Fernández, L.; Rodriguez-Gonzalvez, P.; Hernandez-Lopez, D.; Guerrero, D.; Remondino, F.; Menna, F.; Nocerino, E.; Toschi, I.; Ballabeni, A.; et al. GRAPHOS—Open-Source Software for Photogrammetric Applications. Photogramm. Rec. 2018, 33, 11–29. [Google Scholar] [CrossRef]
- Byrne, D.J.; Laefer, D. Variables Effecting Photomosaic Reconstruction and Ortho-Rectification from Aerial Survey Datasets. arXiv 2016, arXiv:1611.03318. [Google Scholar]
- Varshosaz, M.; Sajadian, M.; Pirasteh, S.; Moghimi, A. Automated Two-Step Seamline Detection for Generating Large-Scale Orthophoto Mosaics from Drone Images. Remote Sens. 2024, 16, 903. [Google Scholar] [CrossRef]
- Ortega-Terol, D.; Hernandez-Lopez, D.; Ballesteros, R.; Gonzalez-Aguilera, D. Automatic Hotspot and Sun Glint Detection in UAV Multispectral Images. Sensors 2017, 17, 2352. [Google Scholar] [CrossRef] [PubMed]
- Cox, C.; Munk, W. Measurement of the Roughness of the Sea Surface from Photographs of the Sun’s Glitter. J. Opt. Soc. Am. 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun Glint Correction of High and Low Spatial Resolution Images of Aquatic Scenes: A Review of Methods for Visible and near-Infrared Wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Harmel, T.; Chami, M.; Tormos, T.; Reynaud, N.; Danis, P.A. Sunglint Correction of the Multi-Spectral Instrument (MSI)-SENTINEL-2 Imagery over Inland and Sea Waters from SWIR Bands. Remote Sens. Environ. 2018, 204, 308–321. [Google Scholar] [CrossRef]
- Goodman, J.A.; Lee, Z.; Ustin, S.L. Influence of Atmospheric and Sea-Surface Corrections on Retrieval of Bottom Depth and Reflectance Using a Semi-Analytical Model: A Case Study in Kaneohe Bay, Hawaii. Appl. Opt. 2008, 47, F1–F11. [Google Scholar] [CrossRef]
- Wang, M.; Bailey, S.W. Correction of Sun Glint Contamination on the SeaWiFS Ocean and Atmosphere Products. Appl. Opt. 2001, 40, 4790–4798. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Isaacman, A.; Franz, B.A.; McClain, C.R. Ocean-Color Optical Property Data Derived from the Japanese Ocean Color and Temperature Scanner and the French Polarization and Directionality of the Earth’s Reflectances: A Comparison Study. Appl. Opt. 2002, 41, 974–990. [Google Scholar] [CrossRef] [PubMed]
- Mustard, J.F.; Staid, M.I.; Fripp, W.J. A Semianalytical Approach to the Calibration of AVIRIS Data to Reflectance over Water Application in a Temperate Estuary. Remote Sens. Environ. 2001, 75, 335–349. [Google Scholar] [CrossRef]
- Olivetti, D.; Roig, H.; Martinez, J.-M.; Borges, H.; Ferreira, A.; Casari, R.; Salles, L.; Malta, E. Low-Cost Unmanned Aerial Multispectral Imagery for Siltation Monitoring in Reservoirs. Remote Sens. 2020, 12, 1855. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and Robust Removal of Sun Glint for Mapping Shallow-Water Benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Overstreet, B.T.; Legleiter, C.J. Removing Sun Glint from Optical Remote Sensing Images of Shallow Rivers. Earth Surf. Process. Landf. 2017, 42, 318–333. [Google Scholar] [CrossRef]
- Tiškus, E.; Bučas, M.; Vaičiūtė, D.; Gintauskas, J.; Babrauskienė, I. An Evaluation of Sun-Glint Correction Methods for UAV-Derived Secchi Depth Estimations in Inland Water Bodies. Drones 2023, 7, 546. [Google Scholar] [CrossRef]
- Qin, J.; Li, M.; Gruen, A.; Li, D.; Gong, J.; Liao, X. Assessment of Sun Glint Correction Methods in Unmanned Aerial Vehicle-Based Ocean Optical Remote Sensing. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 6034–6038. [Google Scholar]
- Qin, J.; Li, M.; Zhao, J.; Zhong, J.; Zhang, H. Revolutionize the Oceanic Drone RGB Imagery with Pioneering Sun Glint Detection and Removal Techniques. In Proceedings of the 2024 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2024; pp. 8311–8320. [Google Scholar]
- Kirk, J.T.O. (Ed.) Light and Photosyntesis in Aquatic Ecosystems; Cambridge University Press: Cambridge, UK, 2011; ISBN 978-0-521-15175-7. [Google Scholar]
- Ruddick, K.G.; De Cauwer, V.; Park, Y.-J.; Moore, G.F. Seaborne Measurements of near Infrared Water-Leaving Reflectance: The Similarity Spectrum for Turbid Waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef]
- Ritchie, J.C.; Schiebe, F.R.; McHenry, J.R. Remote Sensing of Suspended Sediments in Surface Waters. Photogramm. Remote Sens 1976, 42, 1539–1545. [Google Scholar]
- Kutser, T.; Paavel, B.; Verpoorter, C.; Ligi, M.; Soomets, T.; Toming, K.; Casal, G. Remote Sensing of Black Lakes and Using 810 nm Reflectance Peak for Retrieving Water Quality Parameters of Optically Complex Waters. Remote Sens. 2016, 8, 497. [Google Scholar] [CrossRef]
- Kallio, K.; Kutser, T.; Hannonen, T.; Koponen, S.; Pulliainen, J.; Pyhalahti, T. Retrieval of Water Quality from Airborne Imaging Spectrometry of Various Lake Types in Different Seasons. Sci. Total Environ. 2001, 268, 59–77. [Google Scholar] [CrossRef] [PubMed]
- Martins, V.S.; Barbosa, C.C.F.; de Carvalho, L.A.S.; Jorge, D.S.F.; de L. Lobo, F.; de Moraes Novo, E.M.L. Assessment of Atmospheric Correction Methods for Sentinel-2 MSI Images Applied to Amazon Floodplain Lakes. Remote Sens. 2017, 9, 322. [Google Scholar] [CrossRef]
- Borges, H.D.; Cicerelli, R.E.; De Almeida, T.; Roig, H.L.; Olivetti, D. Monitoring Cyanobacteria Occurrence in Freshwater Reservoirs Using Semi-Analytical Algorithms and Orbital Remote Sensing. Mar. Freshw. Res. 2020, 71, 569–578. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Local | In Situ Data | Aerosurveys | RS * Platform | |||
|---|---|---|---|---|---|---|---|
| N * | OAP * | TSS (mg/L) | Multi. | Hyper. | |||
| 08/05/2015 | Paranoá | 6 | Rrs | 2.8–12.4 | - | - | In situ |
| 28/05/2015 | Paranoá | 7 | Rrs | 1.6–4.1 | - | - | In situ |
| 17/06/2015 | Paranoá | 5 | Rrs | 0.6–7.8 | - | - | In situ |
| 21/08/2015 | Paranoá | 10 | Rrs | 0.2–3.1 | - | - | In situ |
| 29/06/2016 | Paranoá | 6 | Rrs | 2.1–5.9 | - | - | In situ |
| 03/10/2016 | Paranoá | 6 | Rrs | 0.7–37.5 | - | - | In situ |
| 05/05/2017 | Paranoá | 14 | Rrs | 0.6–3.4 | - | - | In situ |
| 14/06/2017 | Paranoá | 6 | Rrs | 0.9–1.8 | - | - | In situ |
| 25/10/2017 | Paranoá | 8 | Rrs | 0.6–12.6 | - | - | In situ |
| 02/03/2018 | Paranoá | 5 | - | 23–36.2 | Sequoia | - | UAV/Multirotor |
| 29/03/2018 | Corumbá IV | 5 | Rrs | 5.0–15.6 | Sequoia | - | UAV/Fixed Wing |
| 24/04/2018 | Manacapuru | 1 | Rrs | 130.7 | Sequoia | - | UAV/Fixed Wing |
| 25/04/2018 | Manaus | 7 | Rrs | 3.6–115.1 | Sequoia | - | UAV/Multirotor |
| 18/05/2018 | Corumbá IV | 5 | Rrs | 1.0–2.2 | Sequoia | - | UAV/Fixed Wing |
| 12/09/2018 | Paranoá | 7 | - | 8.8–15.6 | Sequoia | - | UAV/Multirotor |
| 31/10/2018 | Paranoá | 1 | - | 186.8 | Sequoia | - | UAV/Multirotor |
| 02/11/2018 | Paranoá | 12 | - | 2.7–43.2 | Sequoia | - | UAV/Multirotor |
| 09/11/2018 | Paranoá | 1 | - | 73.2 | Sequoia | - | UAV/Multirotor |
| 11/11/2018 | Paranoá | 1 | - | 78.8 | Sequoia | - | UAV/Multirotor |
| 05/12/2018 | Paranoá | 1 | - | 68.2 | Sequoia | - | UAV/Multirotor |
| 11/05/2019 | Três Marias | 2 | Rrs | 0.6–2.8 | - | Nano | Helicopter |
| 12/05/2019 | Retiro Baixo | 6 | Rrs | 0.6–11.2 | Nano | Helicopter | |
| 13/05/2019 | Retiro Baixo | 6 | Rrs | - | Nano | Helicopter | |
| 14/05/2019 | Paraopeba | 2 | Rrs | 29.6–31.2 | Nano | Helicopter | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olivetti, D.; Roig, H.L.; Martinez, J.-M.; Ferreira, A.M.R.; Marinho, R.R.; Mincato, R.L.; Martins, E.S.P.R. Inland Water Quality Monitoring Using Airborne Small Cameras: Enhancing Suspended Sediment Retrieval and Mitigating Sun Glint Effects. Drones 2025, 9, 173. https://doi.org/10.3390/drones9030173
Olivetti D, Roig HL, Martinez J-M, Ferreira AMR, Marinho RR, Mincato RL, Martins ESPR. Inland Water Quality Monitoring Using Airborne Small Cameras: Enhancing Suspended Sediment Retrieval and Mitigating Sun Glint Effects. Drones. 2025; 9(3):173. https://doi.org/10.3390/drones9030173
Chicago/Turabian StyleOlivetti, Diogo, Henrique L. Roig, Jean-Michel Martinez, Alexandre M. R. Ferreira, Rogério R. Marinho, Ronaldo L. Mincato, and Eduardo Sávio P. R. Martins. 2025. "Inland Water Quality Monitoring Using Airborne Small Cameras: Enhancing Suspended Sediment Retrieval and Mitigating Sun Glint Effects" Drones 9, no. 3: 173. https://doi.org/10.3390/drones9030173
APA StyleOlivetti, D., Roig, H. L., Martinez, J.-M., Ferreira, A. M. R., Marinho, R. R., Mincato, R. L., & Martins, E. S. P. R. (2025). Inland Water Quality Monitoring Using Airborne Small Cameras: Enhancing Suspended Sediment Retrieval and Mitigating Sun Glint Effects. Drones, 9(3), 173. https://doi.org/10.3390/drones9030173