

UAV–UGV Formation for Delivery Missions: A Practical Case Study

 ,
,  , and
, and 
Abstract
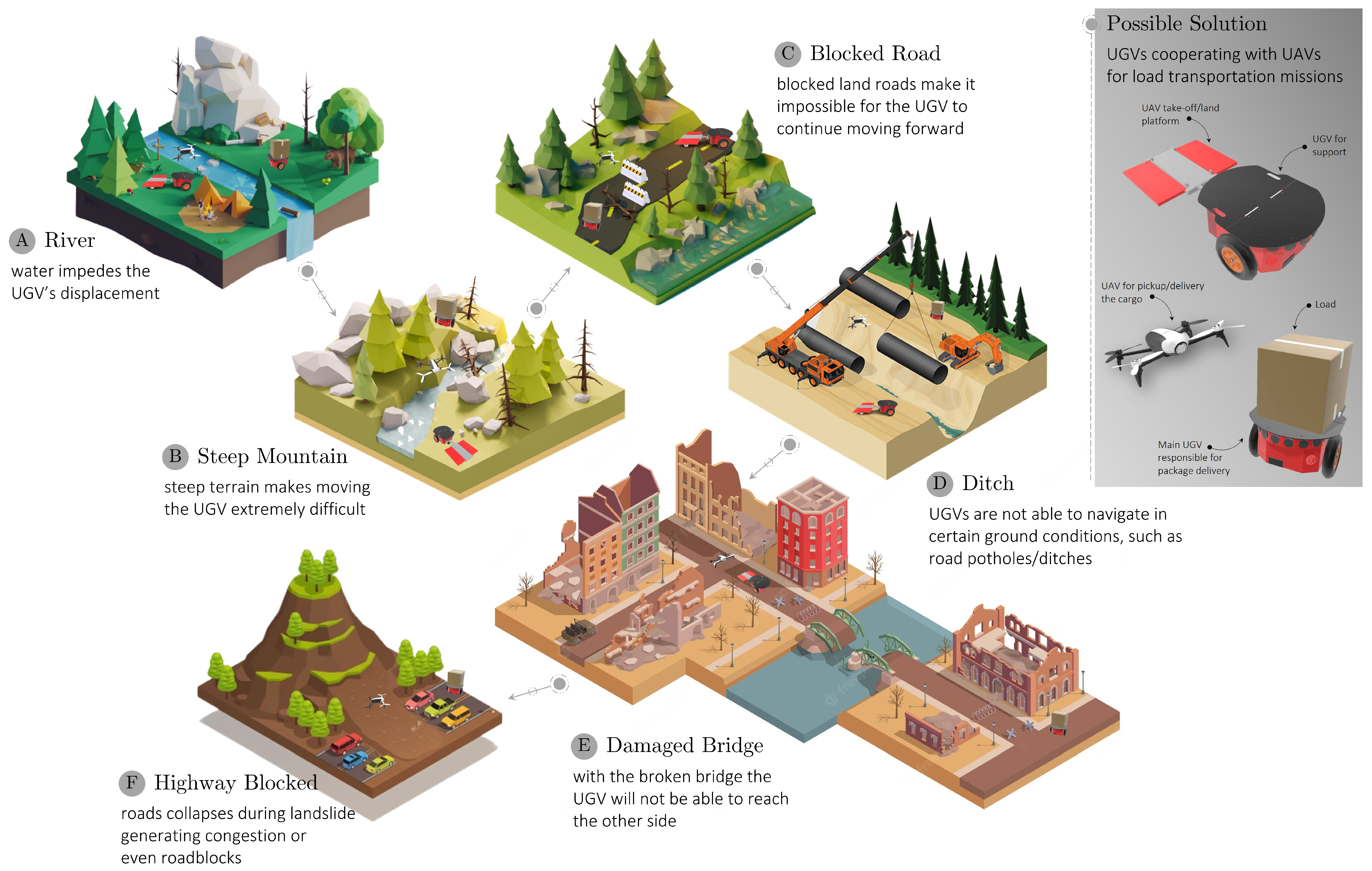
1. Introduction
1.1. Related Works
1.2. Aims and Contributions of the Work
- High-level decentralized mission planning for a UGV–UAV formation cooperatively working in transportation missions under environment constraints.
- The development of a lightweight electromagnet actuator driven by an Arduino Nano microcontroller.
- Validation in real-world experiments, allowing for success in accomplishing the picking/delivery of cargo from/on moving UGVs.
2. Mission Planning for Last-Mile Delivery Application
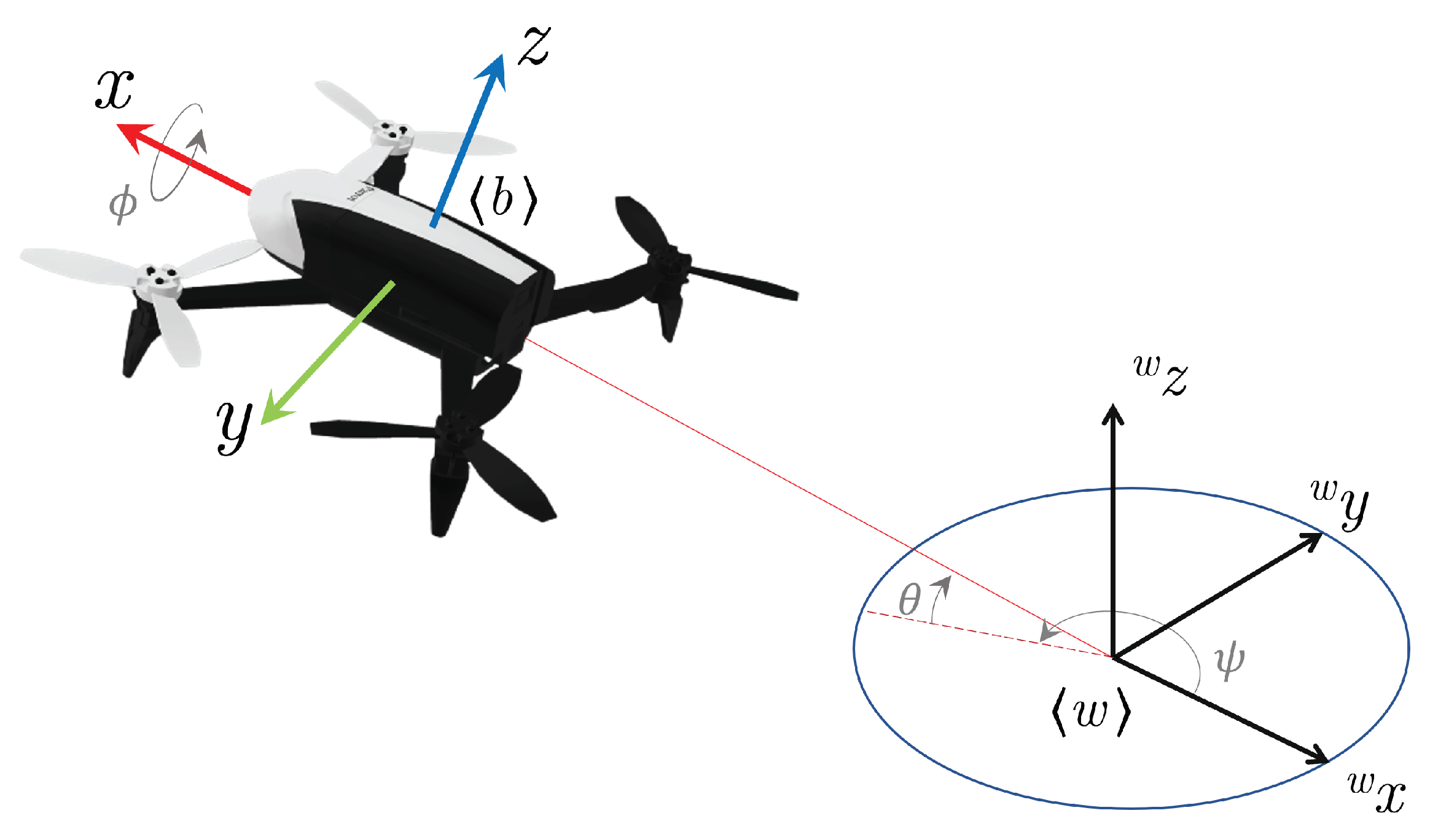
2.1. Robot Modeling and Control
2.1.1. The Pioneer P3-Dx UGV
2.1.2. The Parrot Bebop 2 UAV
2.2. The Proposed Case Study for the Last-Mile Multi-Robot System
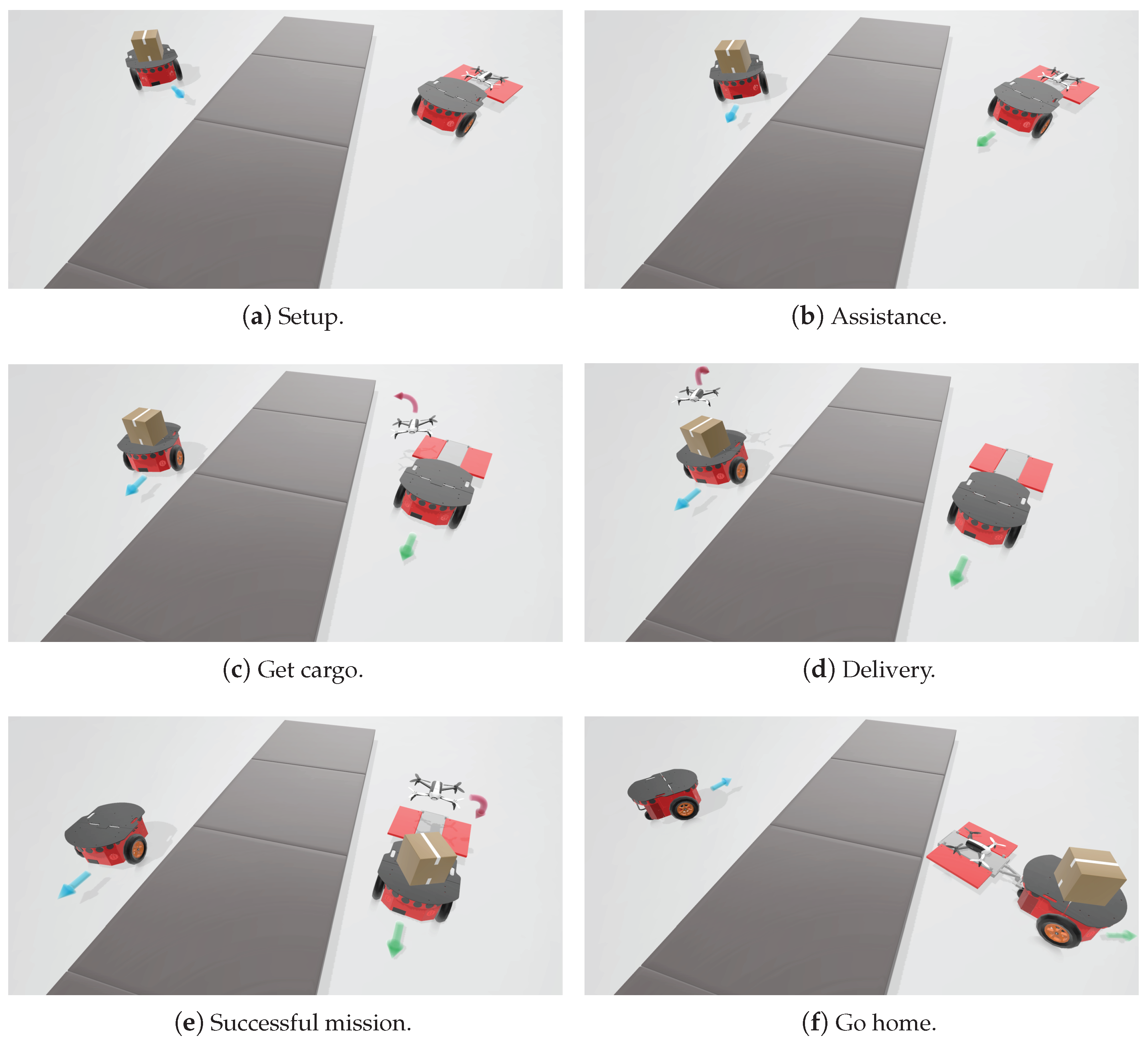
2.3. The Cooperative Load Transportation Strategy
- (i)
- Setup, Figure 8a: In the first step, UGV A receives its mission and initializes its movement with the load onboard. UGV B still waits for its task allocation;
- (ii)
- Assistance, Figure 8b: UGV A faces an obstacle ahead and emits a request for assistance. While it reduces its velocity, a meeting request is sent to UGV B;
- (iii)
- Collect Cargo, Figure 8c: UAV collects the load on UGV A, while both the UGVs remain in motion. UAV takes off from UGV B and moves toward UGV A to identify and pick up the transported load;
- (iv)
- Delivery, Figure 8d: UAV collects the load and transports it to the moving UGV B, estimating its instantaneous position and velocity to delivery the load on it with precise accuracy;
- (v)
- Successful Mission, Figure 8e: Once its pickup-and-delivery mission is successfully completed, UAV delivers the load on top of UGV B and prepares to land on the trailer. Meanwhile, UGV A continues its movement;
- (vi)
- Go Home, Figure 8f: UGV A and B return to their GCS or perform a last-mile delivery mission.
- Cooperate with the UAV to perform a last-mile delivery directly to the customer.
- Navigate back to the GCS or a designated hub to transfer the packages for further processing or delivery.
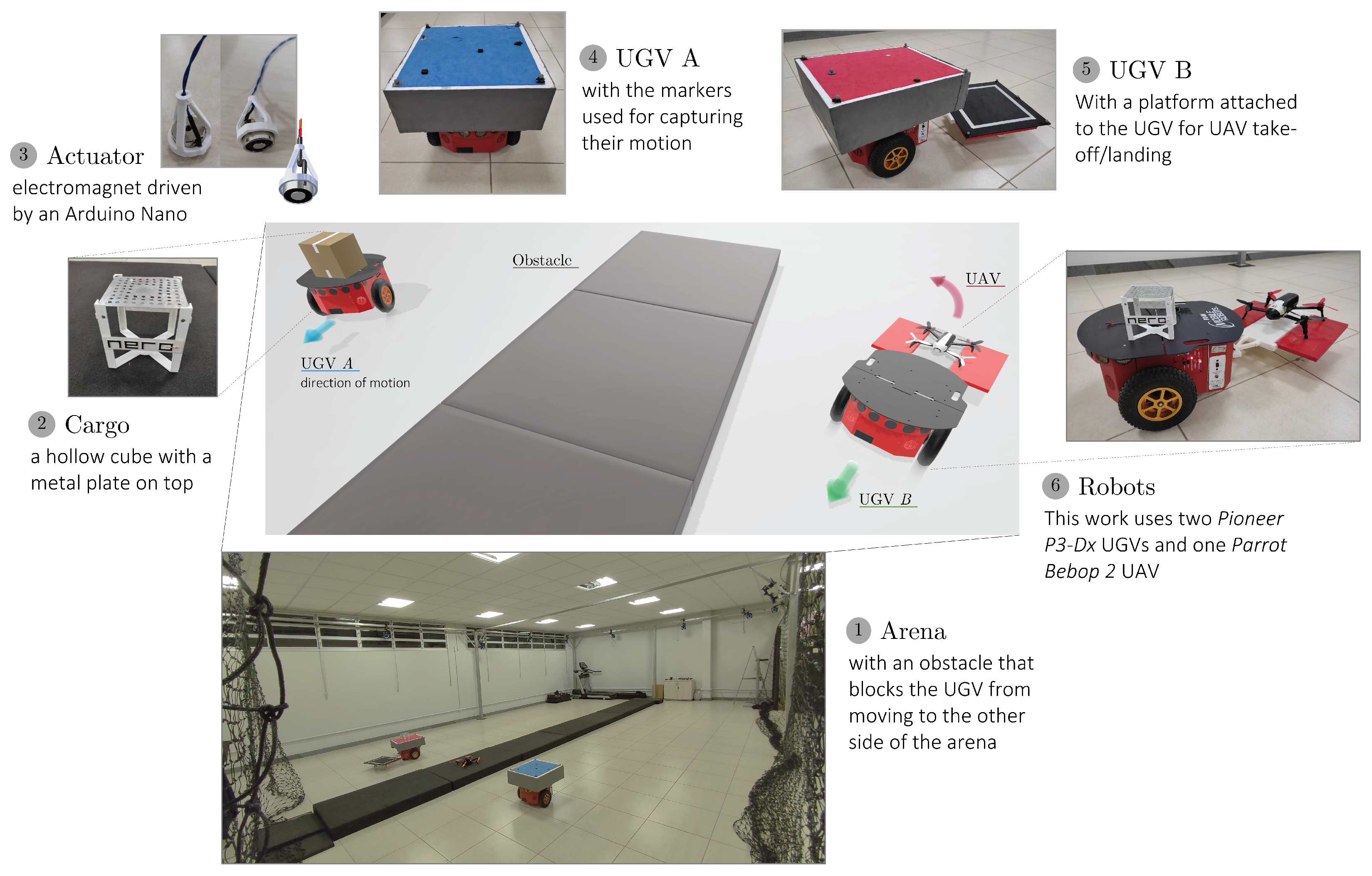
3. Experimental Setup
3.1. Electronic Module of the Actuation System
3.2. Path Parameters for the Robots
4. Results and Discussion
4.1. Robots’ Behavior During Navigation
4.2. Practical Issues Related to Perception and Navigation
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gupta, A.; Afrin, T.; Scully, E.; Yodo, N. Advances of UAVs toward future transportation: The State-of-the-Art, challenges, and Opportunities. Future Transp. 2021, 1, 326–350. [Google Scholar] [CrossRef]
- Cortes, J.D.; Suzuki, Y. Last-mile delivery efficiency: En route transloading in the parcel delivery industry. Int. J. Prod. Res. 2022, 60, 2983–3000. [Google Scholar] [CrossRef]
- Barakou, S.C.; Tzafestas, C.S.; Valavanis, K.P. A Review of Real-Time Implementable Cooperative Aerial Manipulation Systems. Drones 2024, 8, 196. [Google Scholar] [CrossRef]
- Nguyen, V.S.; Jung, J.; Jung, S.; Joe, S.; Kim, B. Deployable hook retrieval system for UAV rescue and delivery. IEEE Access 2021, 9, 74632–74645. [Google Scholar] [CrossRef]
- Estevez, J.; Garate, G.; Lopez-Guede, J.M.; Larrea, M. Review of aerial transportation of suspended-cable payloads with quadrotors. Drones 2024, 8, 35. [Google Scholar] [CrossRef]
- Ollero, A.; Tognon, M.; Suarez, A.; Lee, D.; Franchi, A. Past, present, and future of aerial robotic manipulators. IEEE Trans. Robot. 2021, 38, 626–645. [Google Scholar] [CrossRef]
- Villa, D.K.; Brandão, A.S.; Sarcinelli-Filho, M. Load transportation using quadrotors: A survey of experimental results. In Proceedings of the 2018 International conference on unmanned aircraft systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 84–93. [Google Scholar]
- Pizetta, I.H.B.; Brandão, A.S.; Sarcinelli-Filho, M. Cooperative load transportation using three quadrotors. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 644–650. [Google Scholar]
- Jin, X.; Hu, Z. Adaptive Cooperative Load Transportation by a Team of Quadrotors With Multiple Constraint Requirements. IEEE Trans. Intell. Transp. Syst. 2022, 24, 801–814. [Google Scholar] [CrossRef]
- Michael, N.; Fink, J.; Kumar, V. Cooperative manipulation and transportation with aerial robots. Auton. Robot. 2011, 30, 73–86. [Google Scholar] [CrossRef]
- Sreenath, K.; Kumar, V. Dynamics, control and planning for cooperative manipulation of payloads suspended by cables from multiple quadrotor robots. Robot. Sci. Syst. 2013. [Google Scholar]
- Tang, S.; Sreenath, K.; Kumar, V. Multi-robot trajectory generation for an aerial payload transport system. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1055–1071. [Google Scholar]
- Ritz, R.; D’Andrea, R. Carrying a flexible payload with multiple flying vehicles. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3465–3471. [Google Scholar]
- Augugliaro, F.; Lupashin, S.; Hamer, M.; Male, C.; Hehn, M.; Mueller, M.W.; Willmann, J.S.; Gramazio, F.; Kohler, M.; D’Andrea, R. The flight assembled architecture installation: Cooperative construction with flying machines. IEEE Control Syst. Mag. 2014, 34, 46–64. [Google Scholar]
- Munasinghe, I.; Perera, A.; Deo, R.C. A Comprehensive Review of UAV-UGV Collaboration: Advancements and Challenges. J. Sens. Actuator Netw. 2024, 13, 81. [Google Scholar] [CrossRef]
- Vu, Q.; Raković, M.; Delic, V.; Ronzhin, A. Trends in development of UAV-UGV cooperation approaches in precision agriculture. In Proceedings of the Interactive Collaborative Robotics: Third International Conference, ICR 2018, Leipzig, Germany, 18–22 September 2018; Proceedings 3. Springer: Berlin/Heidelberg, Germany, 2018; pp. 213–221. [Google Scholar]
- Chen, Z.; Hou, S.; Wang, Z.; Chen, Y.; Hu, M.; Ikram, R.M.A. Delivery Route Scheduling of Heterogeneous Robotic System with Customers Satisfaction by Using Multi-Objective Artificial Bee Colony Algorithm. Drones 2024, 8, 519. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, J.; Sun, N. A review of collaborative air-ground robots research. J. Intell. Robot. Syst. 2022, 106, 60. [Google Scholar] [CrossRef]
- Chai, R.; Guo, Y.; Zuo, Z.; Chen, K.; Shin, H.S.; Tsourdos, A. Cooperative motion planning and control for aerial-ground autonomous systems: Methods and applications. Prog. Aerosp. Sci. 2024, 146, 101005. [Google Scholar] [CrossRef]
- Chiang, W.C.; Li, Y.; Shang, J.; Urban, T.L. Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization. Appl. Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Schneider, D. The delivery drones are coming. IEEE Spectr. 2020, 57, 28–29. [Google Scholar] [CrossRef]
- Huang, H.; Hu, C.; Zhu, J.; Wu, M.; Malekian, R. Stochastic Task Scheduling in UAV-Based Intelligent On-Demand Meal Delivery System. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13040–13054. [Google Scholar] [CrossRef]
- She, R.; Ouyang, Y. Efficiency of UAV-based last-mile delivery under congestion in low-altitude air. Transp. Res. Part C Emerg. Technol. 2021, 122, 102878. [Google Scholar] [CrossRef]
- Ghamry, K.A.; Dong, Y.; Kamel, M.A.; Zhang, Y. Real-time autonomous take-off, tracking and landing of UAV on a moving UGV platform. In Proceedings of the 24th Mediterranean Conference on Control and Automation, MED, Athens, Greece, 21–24 June 2016; pp. 1236–1241. [Google Scholar] [CrossRef]
- Bai, X.; Cao, M.; Yan, W.; Ge, S.S. Efficient Routing for Precedence-Constrained Package Delivery for Heterogeneous Vehicles. IEEE Trans. Autom. Sci. Eng. 2020, 17, 248–260. [Google Scholar] [CrossRef]
- Das, D.N.; Sewani, R.; Wang, J.; Tiwari, M.K. Synchronized truck and drone routing in package delivery logistics. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5772–5782. [Google Scholar] [CrossRef]
- Bacheti, V.P.; Brandao, A.S.; Sarcinelli-Filho, M. A Path-Following Controller for a UAV-UGV Formation Performing the Final Step of Last-Mile-Delivery. IEEE Access 2021, 9, 142218–142231. [Google Scholar] [CrossRef]
- Sawadsitang, S.; Niyato, D.; Tan, P.S.; Wang, P. Joint ground and aerial package delivery services: A stochastic optimization approach. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2241–2254. [Google Scholar] [CrossRef]
- Arbanas, B.; Ivanovic, A.; Car, M.; Haus, T.; Orsag, M.; Petrovic, T.; Bogdan, S. Aerial-ground robotic system for autonomous delivery tasks. In Proceedings of the 2016 IEEE international conference on robotics and automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5463–5468. [Google Scholar]
- Arbanas, B.; Ivanovic, A.; Car, M.; Orsag, M.; Petrovic, T.; Bogdan, S. Decentralized planning and control for UAV–UGV cooperative teams. Auton. Robot. 2018, 42, 1601–1618. [Google Scholar] [CrossRef]
- Guérin, F.; Guinand, F.; Brethé, J.F.; Pelvillain, H. UAV-UGV cooperation for objects transportation in an industrial area. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 547–552. [Google Scholar]
- Brandão, A.S.; Sarcinelli-Filho, M.; Carelli, R. Leader-following control of a UAV-UGV formation. In Proceedings of the 2013 16th International Conference on Advanced Robotics (ICAR), Montevideo, Uruguay, 25–29 November 2013; pp. 1–6. [Google Scholar]
- De La Cruz, C.; Carelli, R. Dynamic model based formation control and obstacle avoidance of multi-robot systems. Robotica 2008, 26, 345–356. [Google Scholar] [CrossRef]
- Martins, F.N.; Sarcinelli-Filho, M.; Carelli, R. A velocity-based dynamic model and its properties for differential drive mobile robots. J. Intell. Robot. Syst. 2017, 85, 277–292. [Google Scholar] [CrossRef]
- de Carvalho, K.B.; Villa, D.K.D.; Sarcinelli-Filho, M.; Brandão, A.S. Gestures-teleoperation of a heterogeneous multi-robot system. Int. J. Adv. Manuf. Technol. 2022, 118, 1999–2015. [Google Scholar] [CrossRef]
- Tang, S.; Kumar, V. Autonomous flight. Annu. Rev. Control. Robot. Auton. Syst. 2018, 1, 29–52. [Google Scholar] [CrossRef]
- Pinto, A.O.; Marciano, H.N.; Bacheti, V.P.; Moreira, M.S.M.; Brandão, A.S.; Sarcinelli-Filho, M. High-Level Modeling and Control of the Bebop 2 Micro Aerial Vehicle. In Proceedings of the The 2020 International Conference on Unmanned Aircraft Systems, Athens, Greece, 1–4 September 2020; pp. 939–947. [Google Scholar] [CrossRef]
- Lieret, M.; Kogan, V.; Döll, S.; Franke, J. Automated in-house transportation of small load carriers with autonomous unmanned aerial vehicles. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 1010–1015. [Google Scholar]
- Orgeira-Crespo, P.; Rey, G.; Pousada, P.R.; Aguado-Agelet, F. Transport of Light Parts for Logistics Supply in Industrial Manufacturing Plants by Means of UAV. In Applying Drones to Current Societal and Industrial Challenges; Springer: Berlin/Heidelberg, Germany, 2024; pp. 155–180. [Google Scholar]
- Miranda, V.R.; Rezende, A.M.; Rocha, T.L.; Azpúrua, H.; Pimenta, L.C.; Freitas, G.M. Autonomous navigation system for a delivery drone. J. Control. Autom. Electr. Syst. 2022, 33, 141–155. [Google Scholar] [CrossRef]
- Stein, A.; Vexler, D.; Singh, T. ArUco Based Reference Shaping for Real-time Precision Motion Control for Suspended Payloads. In Proceedings of the 2024 American Control Conference (ACC), Toronto, ON, Canada, 10–12 July 2024; pp. 4390–4395. [Google Scholar]
- Lebedev, I.; Erashov, A.; Shabanova, A. Accurate autonomous uav landing using vision-based detection of aruco-marker. In Proceedings of the International Conference on Interactive Collaborative Robotics, Athens, Greece, 21–24 June 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 179–188. [Google Scholar]
- Khazetdinov, A.; Zakiev, A.; Tsoy, T.; Svinin, M.; Magid, E. Embedded ArUco: A novel approach for high precision UAV landing. In Proceedings of the 2021 International Siberian Conference on Control and Communications (SIBCON), Kazan, Russia, 13–15 May 2021; pp. 1–6. [Google Scholar]
- Wang, J.; McKiver, D.; Pandit, S.; Abdelzaher, A.F.; Washington, J.; Chen, W. Precision uav landing control based on visual detection. In Proceedings of the 2020 IEEE Conference on Multimedia Information Processing and Retrieval (MIPR), Shenzhen, China, 6–8 August 2020; pp. 205–208. [Google Scholar]
- Borges, P.V.; Peynot, T.; Liang, S.; Arain, B.; Wildie, M.; Minareci, M.; Lichman, S.; Samvedi, G.; Sa, I.; Hudson, N.; et al. A Survey on Terrain Traversability Analysis for Autonomous Ground Vehicles: Methods, Sensors, and Challenges. Field Robot. 2022, 2, 1567–1627. [Google Scholar] [CrossRef]
- Trevelyan, J.; Hamel, W.R.; Kang, S.C. Robotics in Hazardous Applications. In Springer Handbook of Robotics; Springer International Publishing: Cham, Switzerland, 2016; pp. 1521–1548. [Google Scholar] [CrossRef]
- Leong, P.Y.; Ahmad, N.S. Exploring Autonomous Load-Carrying Mobile Robots in Indoor Settings: A Comprehensive Review. IEEE Access 2024, 12, 131395–131417. [Google Scholar] [CrossRef]
- Chang, L.; Shan, L.; Jiang, C.; Dai, Y. Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment. Auton. Robot. 2021, 45, 51–76. [Google Scholar] [CrossRef]
- Kim, J.; Yang, G.H. Improvement of dynamic window approach using reinforcement learning in dynamic environments. Int. J. Control. Autom. Syst. 2022, 20, 2983–2992. [Google Scholar] [CrossRef]
- Nekoo, S.; Acosta, J.; Ollero, A. Collision avoidance of SDRE controller using artificial potential field method: Application to aerial robotics. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 551–556. [Google Scholar]
- Sudhakara, P.; Ganapathy, V.; Priyadharshini, B.; Sundaran, K. Obstacle avoidance and navigation planning of a wheeled mobile robot using amended artificial potential field method. Procedia Comput. Sci. 2018, 133, 998–1004. [Google Scholar] [CrossRef]
- Pashna, M.; Yusof, R.; Ismail, Z.H.; Namerikawa, T.; Yazdani, S. Autonomous multi-robot tracking system for oil spills on sea surface based on hybrid fuzzy distribution and potential field approach. Ocean Eng. 2020, 207, 107238. [Google Scholar] [CrossRef]
- Capobianco, S.; Millefiori, L.M.; Forti, N.; Braca, P.; Willett, P. Deep learning methods for vessel trajectory prediction based on recurrent neural networks. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4329–4346. [Google Scholar] [CrossRef]
- Messaoud, K.; Yahiaoui, I.; Verroust-Blondet, A.; Nashashibi, F. Relational recurrent neural networks for vehicle trajectory prediction. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1813–1818. [Google Scholar]
- Debeunne, C.; Vivet, D. A review of visual-LiDAR fusion based simultaneous localization and mapping. Sensors 2020, 20, 2068. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Zhang, L.; Yang, J.; Cao, C.; Wang, W.; Ran, Y.; Tan, Z.; Luo, M. A review of multi-sensor fusion slam systems based on 3D LIDAR. Remote Sens. 2022, 14, 2835. [Google Scholar] [CrossRef]
- Kim, J.H.; Kwon, J.W.; Seo, J. Multi-UAV-based stereo vision system without GPS for ground obstacle mapping to assist path planning of UGV. Electron. Lett. 2014, 50, 1431–1432. [Google Scholar] [CrossRef]
- Hernandez, A.; Copot, C.; Cerquera, J.; Murcia, H.; De Keyser, R. Formation control of UGVs using an UAV as remote vision sensor. IFAC Proc. Vol. 2014, 47, 11872–11877. [Google Scholar] [CrossRef]
- Li, P.; Li, W.; Cui, Z.; Yang, P.; Chen, C.; You, B.; Wang, J. UGV Navigation in Complex Environment: An Approach Integrating Security Detection and Obstacle Avoidance Control. IEEE Trans. Intell. Veh. 2024, 1–14. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Item | PCB |
|---|---|---|
| 2 | Arduino Nano R3.0 | T/R |
| 2 | Wireless Module Nrf24l01 2.4 GHz | T/R |
| 1 | Transistor BC 548 B | R |
| 2 | LED | T |
| 1 | Push Button | T |
| 4 | Resistors | T/R |
| 1 | Electromagnet/Solenoid 20 mm | R |
| - | PCB Pin Header Male/Female Connector | T/R |
| Path-Shape | Description |
|---|---|
| Line | , where and are the desired initial and final position of the path. |
| Super-Ellipse | with m = 5, n = 2, ap = 3, bp = 1, and |
| Land Path | with |
| Seq. | Time | Step | Action | |
|---|---|---|---|---|
| Exp 01 | Exp 02 | |||
| 03:00 | 05:05 | Start | Beginning of the experiment | |
| 1 | 03:04 | 05:10 | Setup | The UGV A starts its mission, transporting the load |
| 2 | 03:05 | 05:12 | Assistance | UGV A meets the obstacle and requests support from UGV B, which initiates its movement towards the point closest to the obstacle |
| 3 | 03:25 | 05:26 | Collect Cargo | The UAV takes off and changes the reference point of the UAV and sends it to an estimated position above the UGV |
| 4 | 03:39 | 05:45 | Delivery | Collect the load and transport it to the top of the UGV B |
| 5 | 04:04 | 06:20 | Successful | While the UGVs are moving, the UAV lands on the trailer coupled to the UGV B |
| 6 | 04:04 | 06:19 | Go Home | UGV A goes to the GCS to finish its mission while UGV B transport the load |
| 7 | 04:12 | 06:29 | Transportation End | UGV B finishes its mission |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fagundes-Júnior, L.A.; Barcelos, C.O.; Silvatti, A.P.; Brandão, A.S. UAV–UGV Formation for Delivery Missions: A Practical Case Study. Drones 2025, 9, 48. https://doi.org/10.3390/drones9010048
Fagundes-Júnior LA, Barcelos CO, Silvatti AP, Brandão AS. UAV–UGV Formation for Delivery Missions: A Practical Case Study. Drones. 2025; 9(1):48. https://doi.org/10.3390/drones9010048
Chicago/Turabian StyleFagundes-Júnior, Leonardo A., Celso O. Barcelos, Amanda Piaia Silvatti, and Alexandre S. Brandão. 2025. "UAV–UGV Formation for Delivery Missions: A Practical Case Study" Drones 9, no. 1: 48. https://doi.org/10.3390/drones9010048
APA StyleFagundes-Júnior, L. A., Barcelos, C. O., Silvatti, A. P., & Brandão, A. S. (2025). UAV–UGV Formation for Delivery Missions: A Practical Case Study. Drones, 9(1), 48. https://doi.org/10.3390/drones9010048