
Near- and Far-Field Acoustic Characteristics and Sound Source Localization Performance of Low-Noise Propellers with Gapped Gurney Flap



Abstract
1. Introduction
2. Materials and Methods
2.1. Drone and Propller
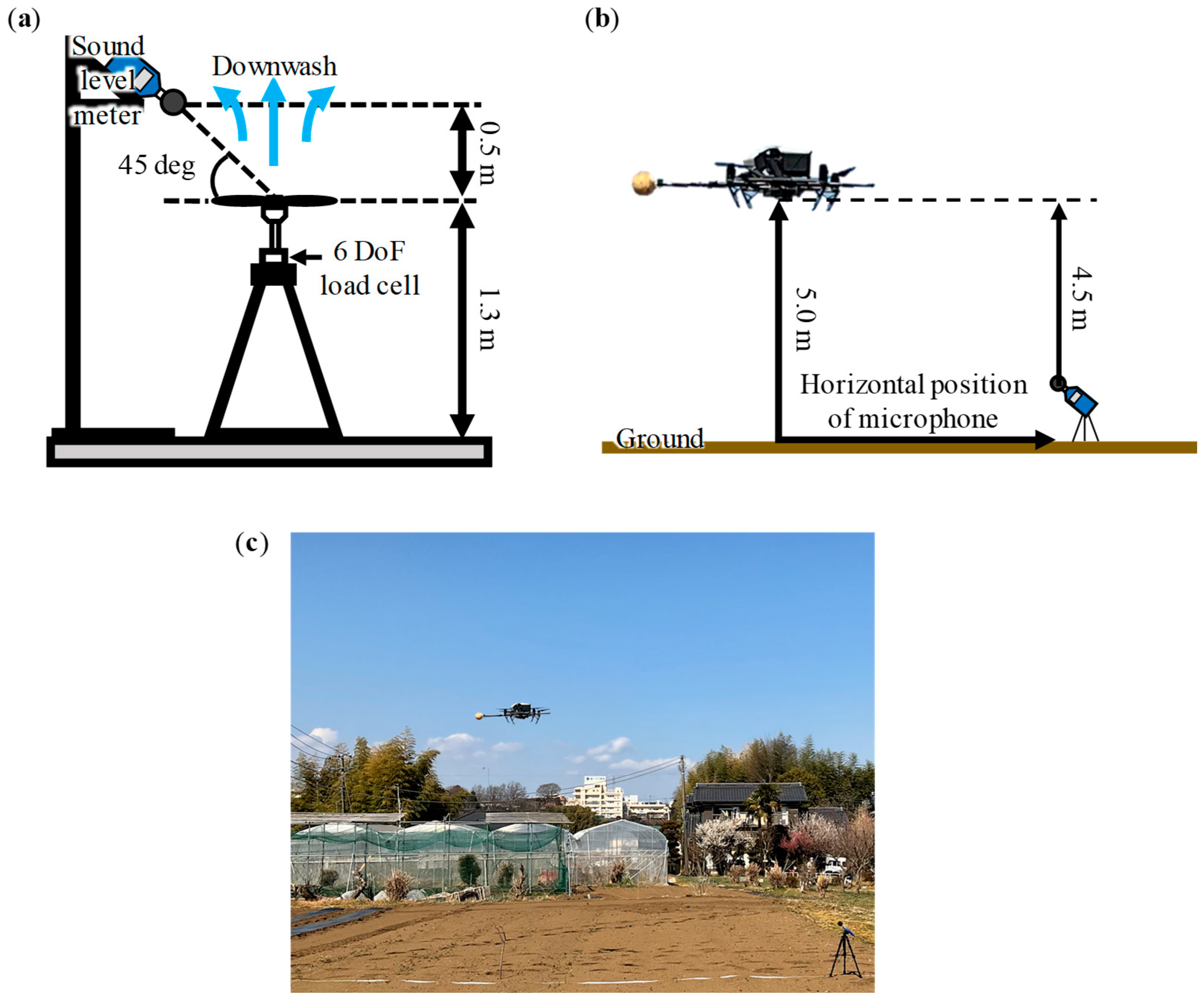
2.2. Simultaneous Measurement of Force and Noise of a Single Propeller and Far-Field Noise Measurement In-Flight
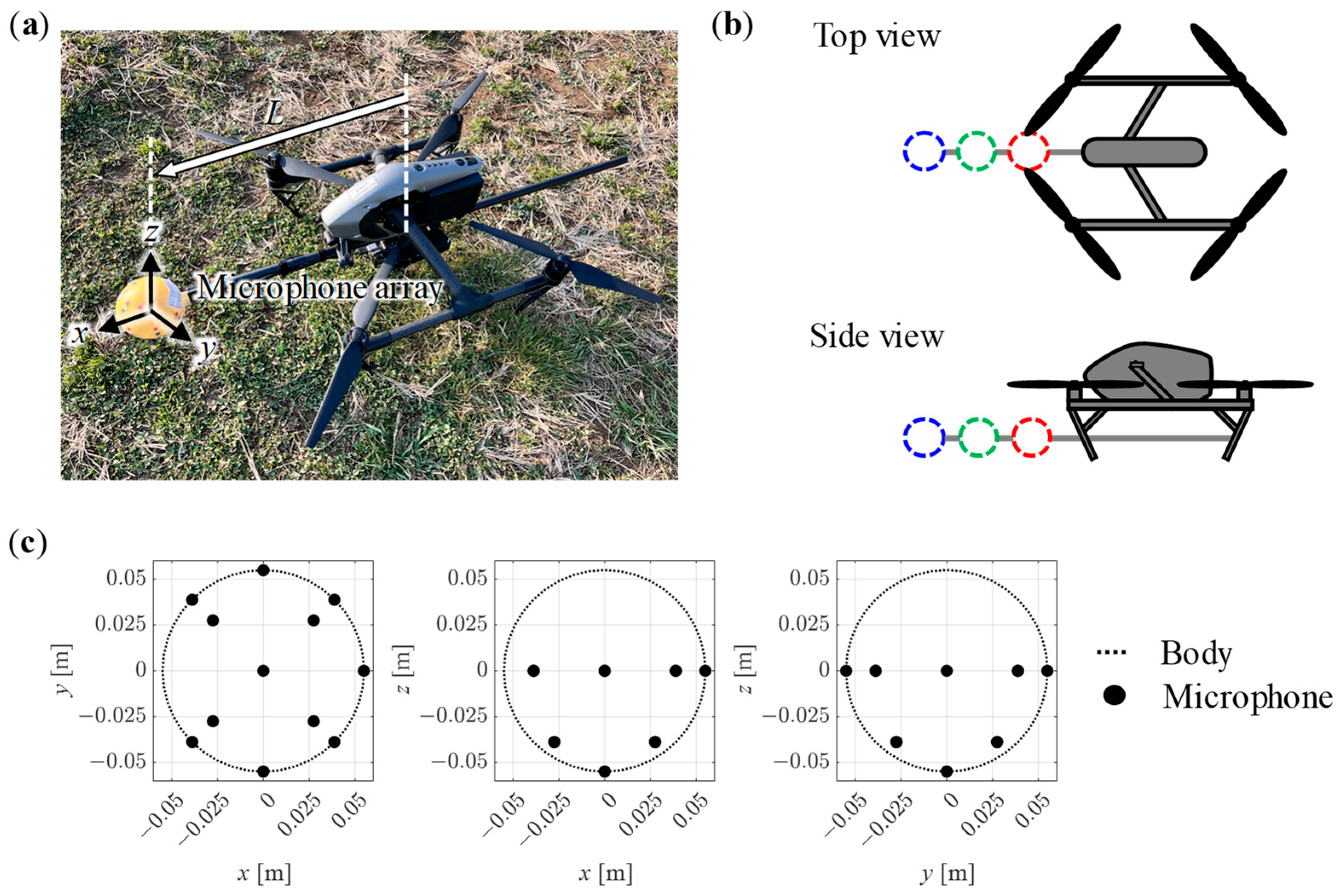
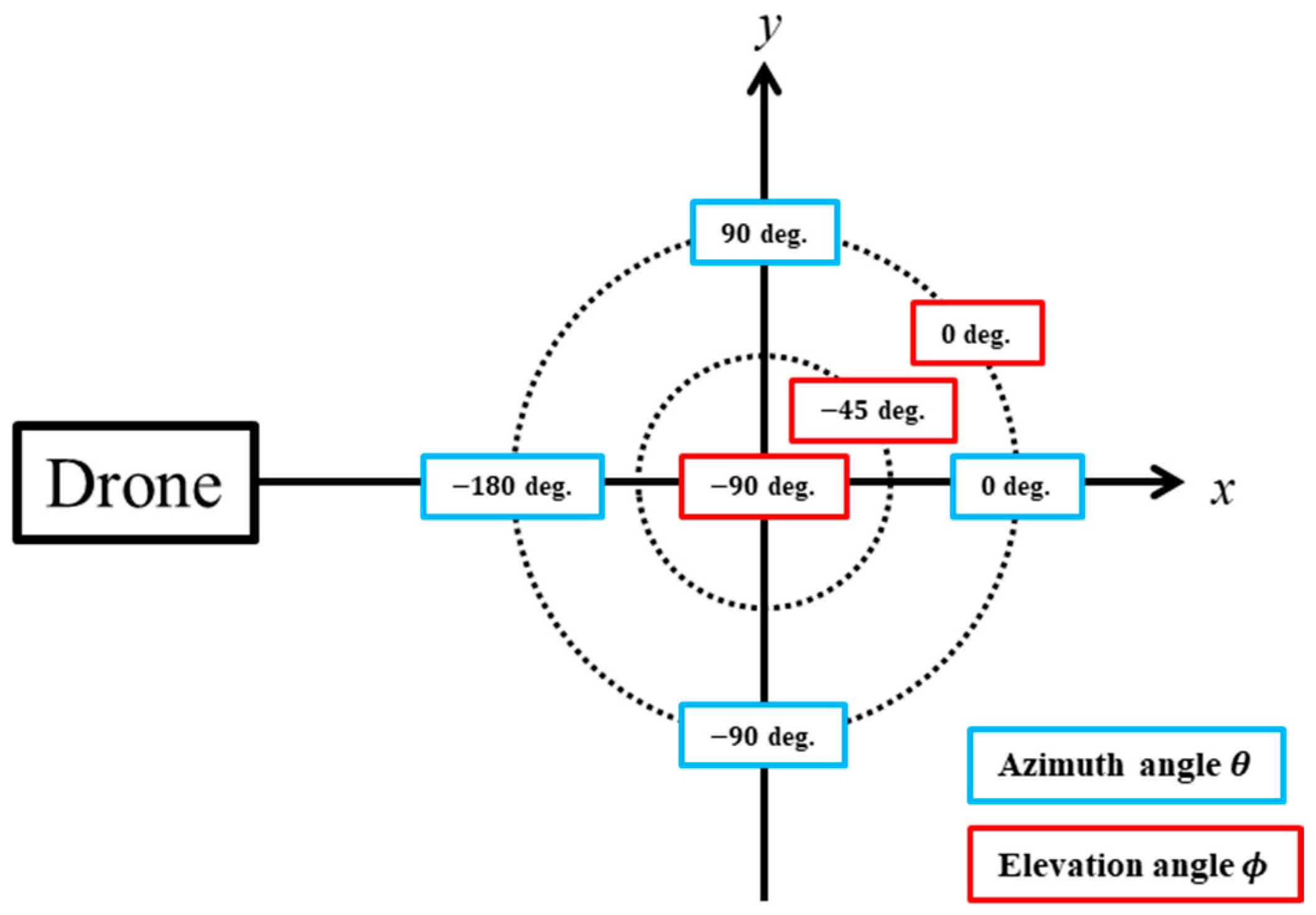
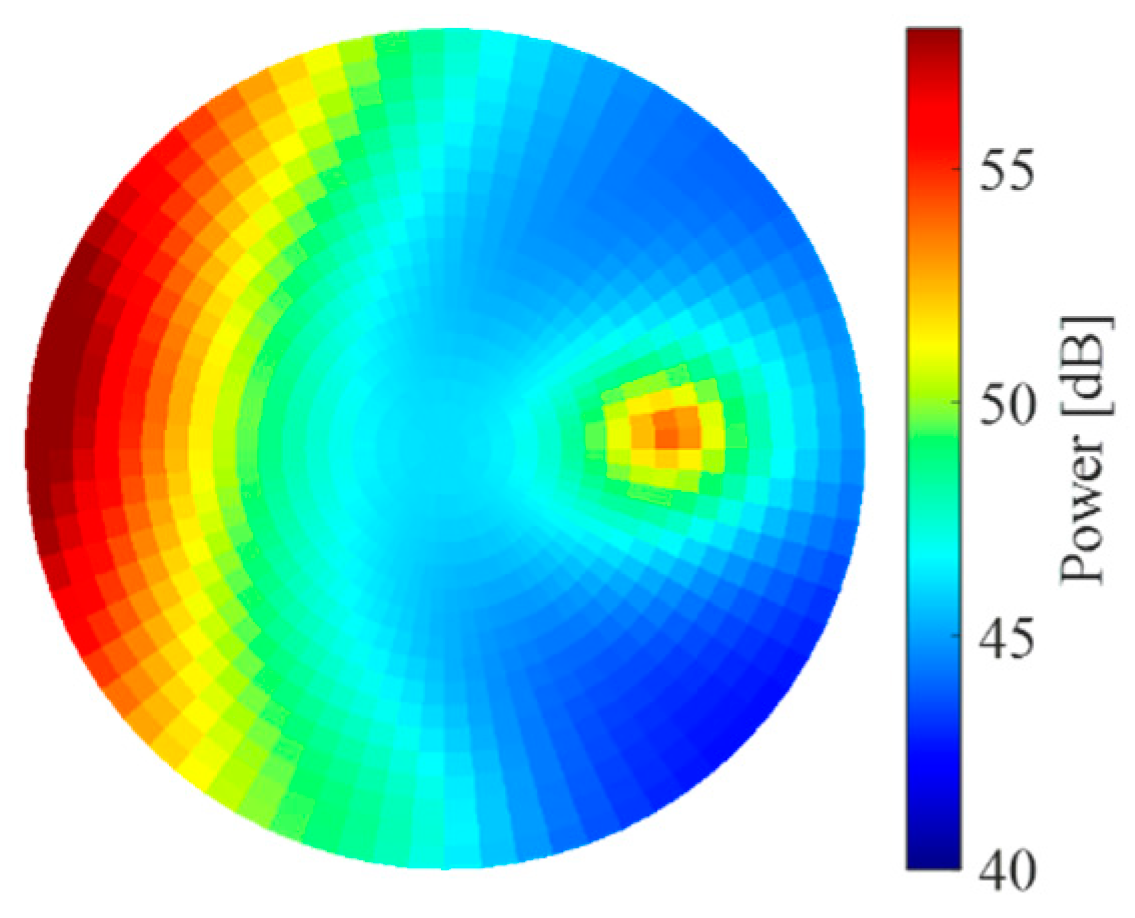
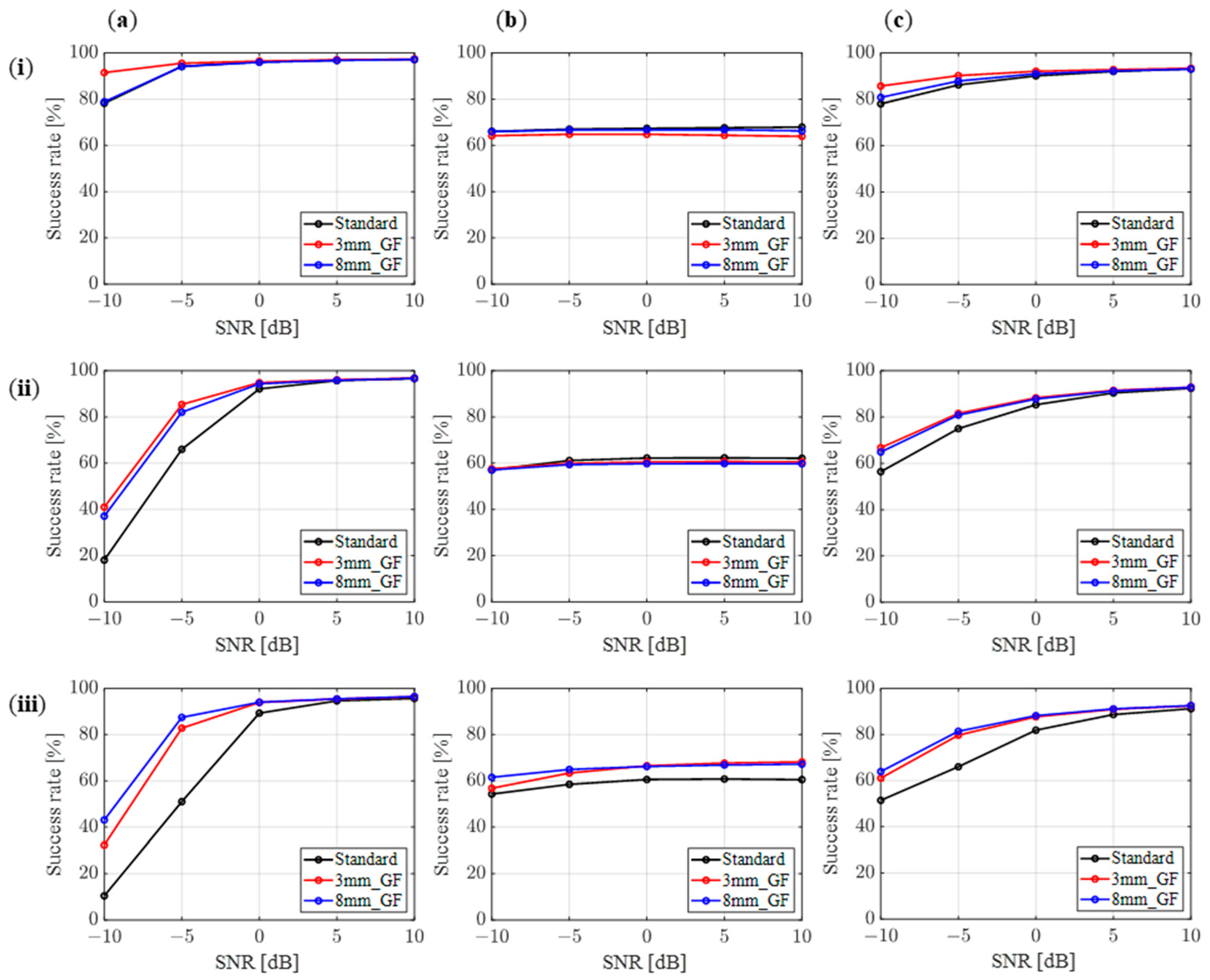
2.3. Near-Field Noise Measurement Using Sperical Microphone Array and Sound Source Localization In-Flight
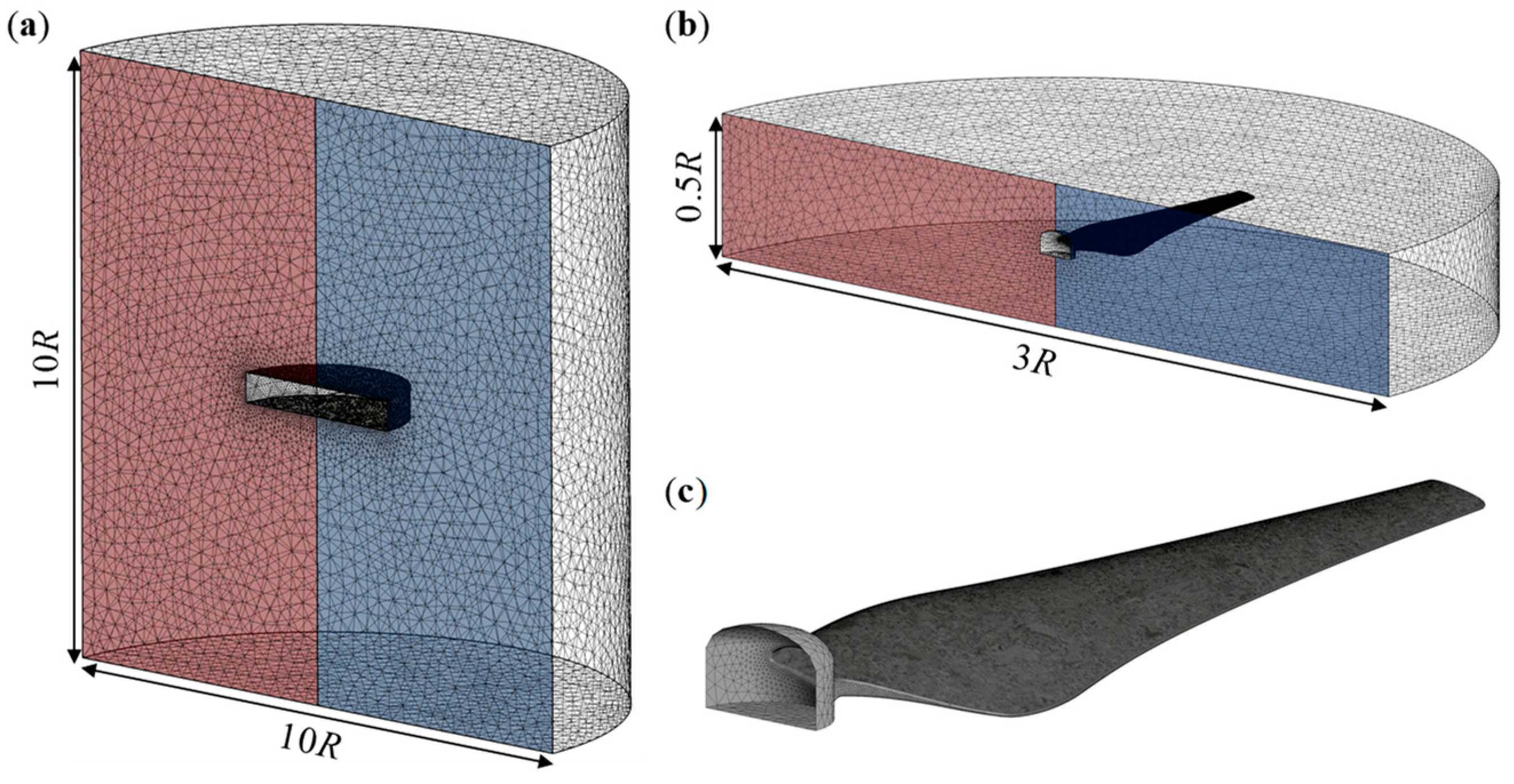
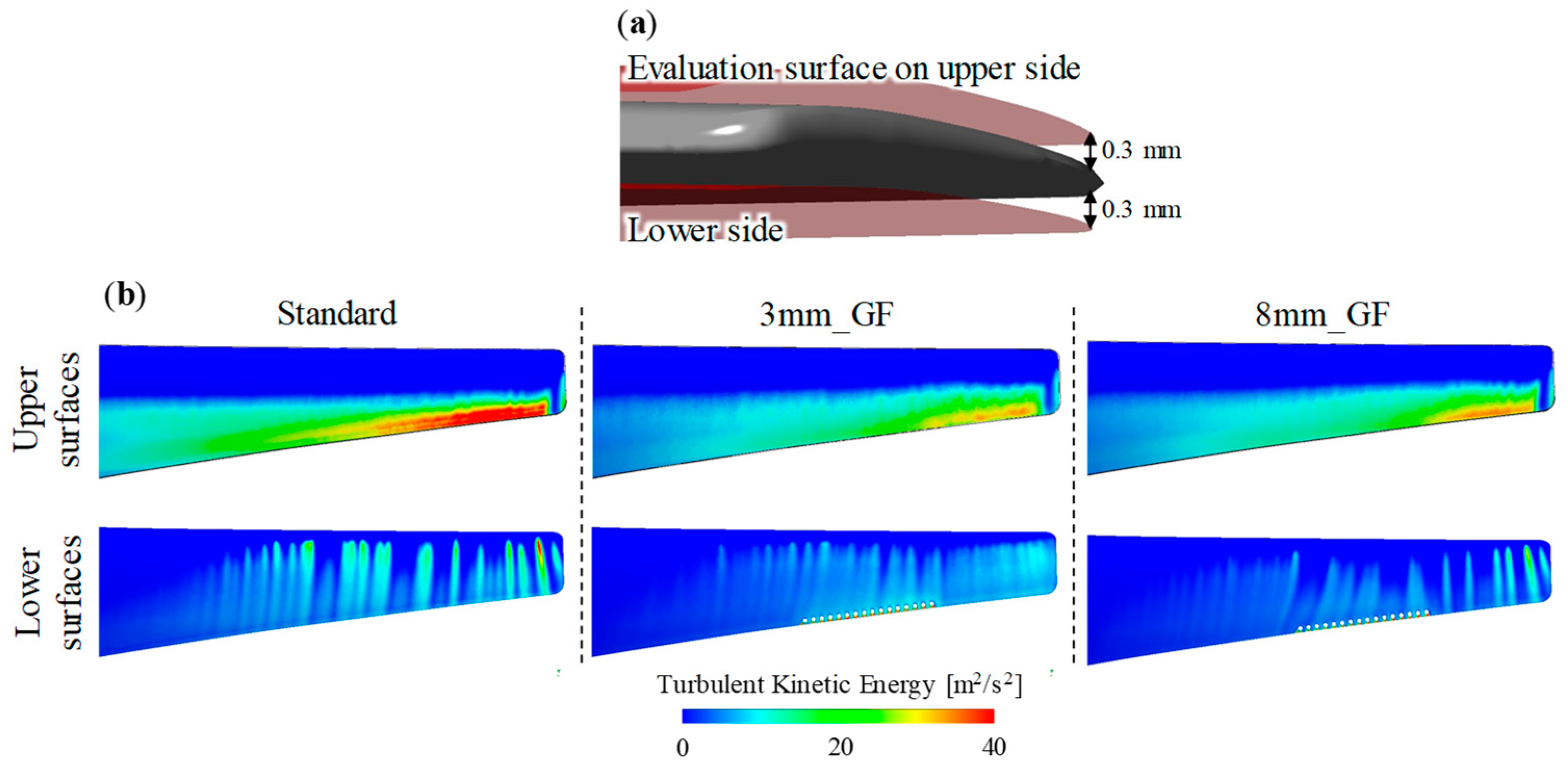
2.4. Flow Field Analysis around Propeller
3. Results and Discussion
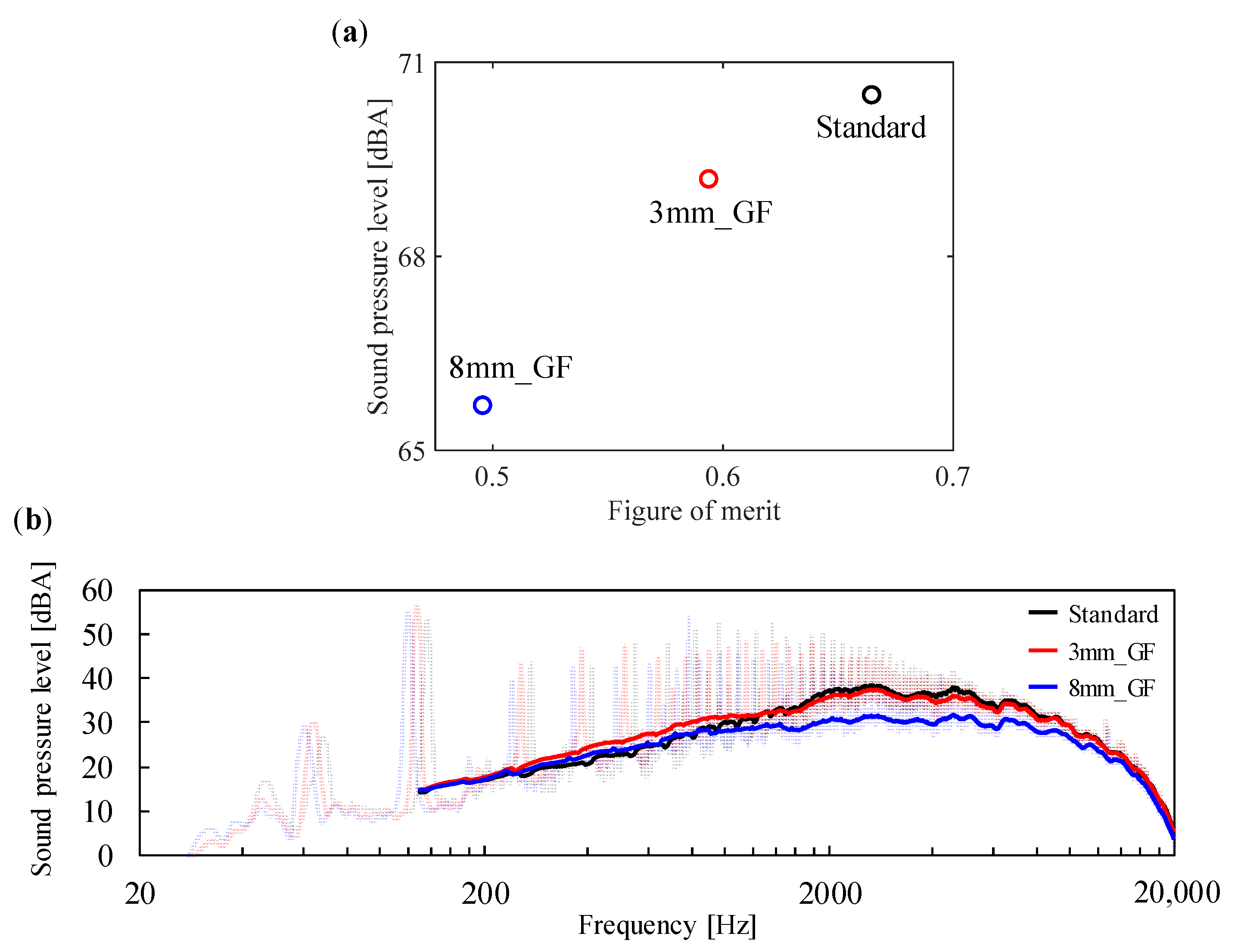
3.1. Effects of Gurney Flap-Inspired Structures for Drone Propellers on Flight Efficiency and Noise
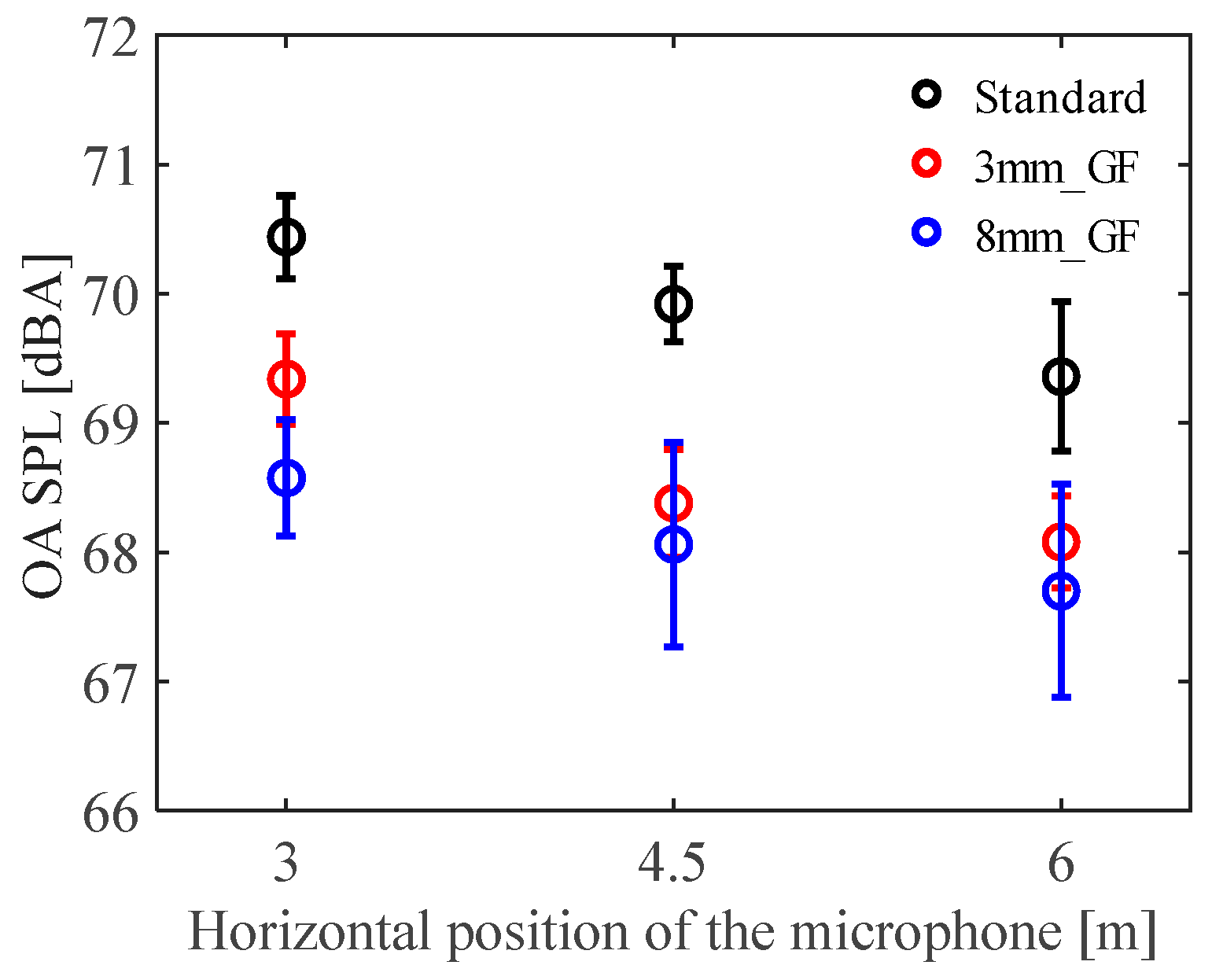
3.2. Noise Characteristics in the Far-Field In-Flight
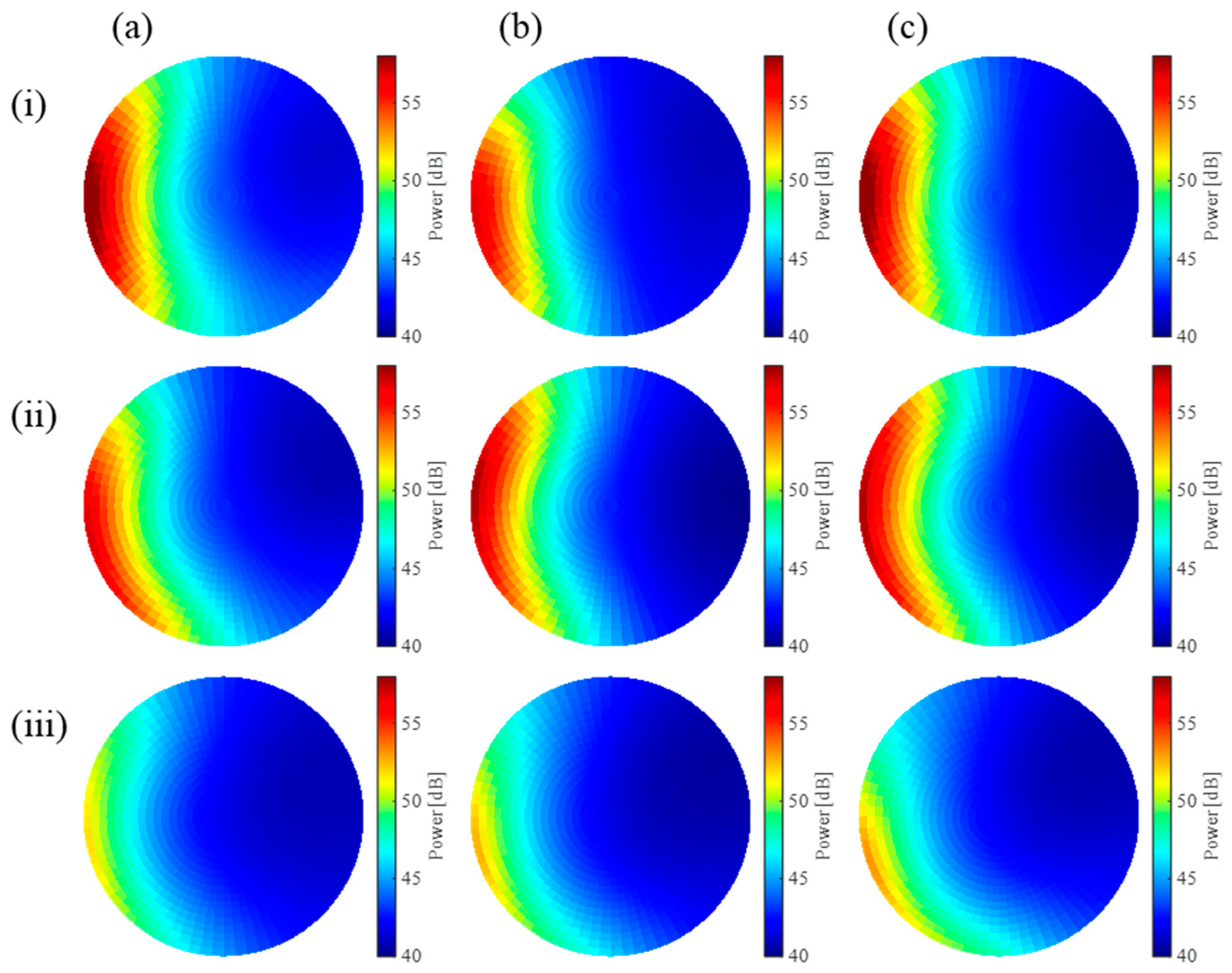
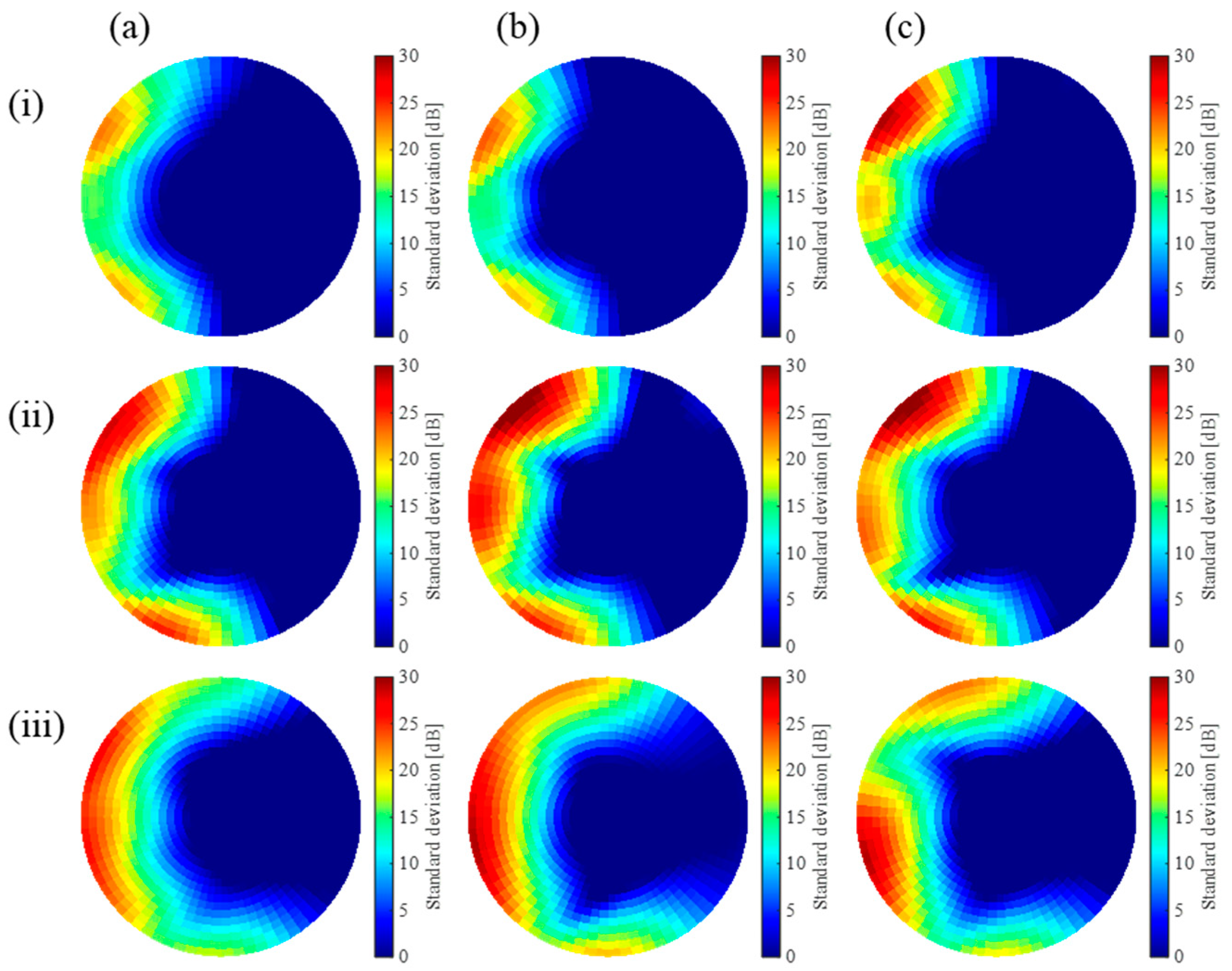
3.3. Noise Characteristics in the Near-Field and Sound Source Localization Performance In-Flight
3.4. Pressure Distribution and Flow Field around Propellers
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nonami, K. Drone Technology, Cutting-Edge Drone Business, and Future Prospects. J. Robot. Mechatron. 2016, 28, 262–272. [Google Scholar] [CrossRef]
- Rothstein, A. Drone; Bloomsbury Publishing: New York, NY, USA, 2015. [Google Scholar]
- Gwak, D.Y.; Han, D.; Lee, S. Sound Quality Factors Influencing Annoyance from Hovering UAV. J. Sound Vib. 2020, 489, 115651. [Google Scholar] [CrossRef]
- Schäffer, B.; Pieren, R.; Heutschi, K.; Wunderli, J.M.; Becker, S. Drone Noise Emission Characteristics and Noise Effects on Humans—A Systematic Review. Int. J. Environ. Res. Public Health 2021, 18, 5940. [Google Scholar] [CrossRef] [PubMed]
- Tan, Q.; Bian, H.; Guo, J.; Zhou, P.; Lo, H.K.; Zhong, S.; Zhang, X. Virtual Flight Simulation of Delivery Drone Noise in the Urban Residential Community. Transp. Res. Part D Transp. Environ. 2023, 118, 103686. [Google Scholar] [CrossRef]
- Bian, H.; Tan, Q.; Zhong, S.; Zhang, X. Assessment of UAM and Drone Noise Impact on the Environment Based on Virtual Flights. Aerosp. Sci. Technol. 2021, 118, 106996. [Google Scholar] [CrossRef]
- Ramos-Romero, C.; Green, N.; Roberts, S.; Clark, C.; Torija, A.J. Requirements for Drone Operations to Minimise Community Noise Impact. Int. J. Environ. Res. Public Health 2022, 19, 9299. [Google Scholar] [CrossRef] [PubMed]
- Ffowcs Williams, J.E.; Hawkings, D.L. Sound Generation by Turbulence and Surfaces in Arbitrary Motion. Phil. Trans. R. Soc. Lond. A 1969, 264, 321–342. [Google Scholar] [CrossRef]
- Williams, J.F.; Hawkings, D.L. Theory Relating to the Noise of Rotating Machinery. J. Sound Vib. 1969, 10, 10–21. [Google Scholar] [CrossRef]
- Farassat, F. Theory of Noise Generation from Moving Bodies with an Application to Helicopter Rotors; National Aeronautics and Space Administration: Washington, DC, USA, 1975.
- Noda, R.; Nakata, T.; Ikeda, T.; Chen, D.; Yoshinaga, Y.; Ishibashi, K.; Rao, C.; Liu, H. Development of Bio-Inspired Low-Noise Propeller for a Drone. J. Robot. Mechatron. 2018, 30, 337–343. [Google Scholar] [CrossRef]
- Shima, E.; Tsutsumi, S.; Fujimoto, K. Preliminary Study on Innovative Loop Propellers for Quiet eVTOL. In Proceedings of the 8th Asian/Australian Rotorcraft Forum, Ankara, Turkey, 30 October–2 November 2019; Volume 30. [Google Scholar]
- Sun, J.; Yonezawa, K.; Shima, E.; Liu, H. Integrated Evaluation of the Aeroacoustics and Psychoacoustics of a Single Propeller. Int. J. Environ. Res. Public Health 2023, 20, 1955. [Google Scholar] [CrossRef]
- Yao, H.-D.; Huang, Z.; Davidson, L.; Niu, J.; Chen, Z.-W. Blade-Tip Vortex Noise Mitigation Traded-Off against Aerodynamic Design for Propellers of Future Electric Aircraft. Aerospace 2022, 9, 825. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, F.; Bian, S.; Kong, D. Noise Reduction of UAV Using Biomimetic Propellers with Varied Morphologies Leading-Edge Serration. J. Bionic Eng. 2020, 17, 767–779. [Google Scholar] [CrossRef]
- Wei, Y.; Qian, Y.; Bian, S.; Xu, F.; Kong, D. Experimental Study of the Performance of a Propeller with Trailing-Edge Serrations. Acoust. Aust. 2021, 49, 305–316. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Liu, Y.; Wang, Y.; Huang, B.; Li, W. Aerodynamic and Aeroacoustic Analyses of a UAV Propeller with Trailing Edge Serrations. In Proceedings of the ACOUSTICS, Ustka, Poland, 11–14 September 2018; Volume 7. [Google Scholar]
- Gu, Y.; Song, F.; Bai, H.; Wu, J.; Liu, K.; Nie, B.; Wang, L.; Zhang, Z.; Lu, Z. Numerical and Experimental Studies on the Owl-Inspired Propellers with Various Serrated Trailing Edges. Appl. Acoust. 2024, 220, 109948. [Google Scholar] [CrossRef]
- Hasegawa, M.; Sakaue, H. Propeller-Noise Reduction by Microfiber Coating on a Blade Surface. Sens. Actuators A Phys. 2024, 371, 115273. [Google Scholar] [CrossRef]
- Liebeck, R.H. Design of Subsonic Airfoils for High Lift. J. Aircr. 1978, 15, 547–561. [Google Scholar] [CrossRef]
- Storms, B.L.; Jang, C.S. Lift Enhancement of an Airfoil Using a Gurney Flap and Vortex Generators. J. Aircr. 1994, 31, 542–547. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J.; Zhang, P. Effects of Gurney Flaps on a NACA0012 Airfoil. Flow Turbul. Combust. 2002, 68, 27–39. [Google Scholar] [CrossRef]
- Wang, J.J.; Li, Y.C.; Choi, K.-S. Gurney Flap—Lift Enhancement, Mechanisms and Applications. Prog. Aerosp. Sci. 2008, 44, 22–47. [Google Scholar] [CrossRef]
- Yee, K.; Joo, W.; Lee, D.-H. Aerodynamic Performance Analysis of a Gurney Flap for Rotorcraft Application. J. Aircr. 2007, 44, 1003–1014. [Google Scholar] [CrossRef]
- Yao, Y.; Ma, D.; Zhang, L.; Yang, X.; Yu, Y. Aerodynamic Optimization and Analysis of Low Reynolds Number Propeller with Gurney Flap for Ultra-High-Altitude Unmanned Aerial Vehicle. Appl. Sci. 2022, 12, 3195. [Google Scholar] [CrossRef]
- Ye, X.; Zheng, N.; Hu, J.; Li, C.; Xue, Z. Numerical Investigation of the Benefits of Serrated Gurney Flaps on an Axial Flow Fan. Energy 2022, 252, 124072. [Google Scholar] [CrossRef]
- Kurtz, D.W.; Marte, J.E. A Review of Aerodynamic Noise from Propellers, Rotors, and Lift Fans; Technical Report; Jet Propulsion Laboratory, California Institute of Technology: Pasadena, CA, USA, 1970; pp. 32–1462. [Google Scholar]
- Wilson, C.E. Noise Control: Measurement, Analysis, and Control of Sound and Vibration; Krieger Pub Co.: Malabar, FL, USA, 1989. [Google Scholar]
- Noda, R.; Ikeda, T.; Nakata, T.; Liu, H. Characterization of the Low-Noise Drone Propeller with Serrated Gurney Flap. Front. Aerosp. Eng. 2022, 1, 1004828. [Google Scholar] [CrossRef]
- Quan, A.; Herrmann, C.; Soliman, H. Project Vulture: A Prototype for Using Drones in Search and Rescue Operations. In Proceedings of the 2019 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini Island, Greece, 29–31 May 2019; pp. 619–624. [Google Scholar]
- Sambolek, S.; Ivasic-Kos, M. Automatic Person Detection in Search and Rescue Operations Using Deep CNN Detectors. IEEE Access 2021, 9, 37905–37922. [Google Scholar] [CrossRef]
- Hoshiba, K.; Washizaki, K.; Wakabayashi, M.; Ishiki, T.; Kumon, M.; Bando, Y.; Gabriel, D.; Nakadai, K.; Okuno, H.G. Design of UAV-Embedded Microphone Array System for Sound Source Localization in Outdoor Environments. Sensors 2017, 17, 2535. [Google Scholar] [CrossRef]
- Zhou, T.; Fattah, R. Tonal Noise Characteristics of Two Small-Scale Propellers. AIAA Pap. 2017, 4054, 2017. [Google Scholar]
- Schmidt, R. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Okutani, K.; Yoshida, T.; Nakamura, K.; Nakadai, K. Outdoor Auditory Scene Analysis Using a Moving Microphone Array Embedded in a Quadrocopter. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 3288–3293. [Google Scholar]
- Hoshiba, K.; Nakadai, K.; Kumon, M.; Okuno, H.G. Assessment of MUSIC-Based Noise-Robust Sound Source Localization with Active Frequency Range Filtering. J. Robot. Mechatron. 2018, 30, 426–435. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten Years of Industrial Experience with the SST Turbulence Model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Ellington, C.P. The Aerodynamics of Hovering Insect Flight. V. A Vortex Theory. Phil. Trans. R. Soc. Lond. B 1984, 305, 115–144. [Google Scholar] [CrossRef]
- Zhang, X.; Sciacchitano, A.; Pröbsting, S. Aeroacoustic Analysis of an Airfoil with Gurney Flap Based on Time-Resolved Particle Image Velocimetry Measurements. J. Sound Vib. 2018, 422, 490–505. [Google Scholar] [CrossRef]
- Cussen, K.; Garruccio, S.; Kennedy, J. UAV Noise Emission–a Combined Experimental and Numerical Assessment. Acoustics 2022, 4, 297–312. [Google Scholar] [CrossRef]
- Kloet, N.; Watkins, S.; Clothier, R. Acoustic Signature Measurement of Small Multi-Rotor Unmanned Aircraft Systems. Int. J. Micro Air Veh. 2017, 9, 3–14. [Google Scholar] [CrossRef]
- Heutschi, K.; Ott, B.; Nussbaumer, T.; Wellig, P. Synthesis of Real World Drone Signals Based on Lab Recordings. Acta Acust. 2020, 4, 24. [Google Scholar] [CrossRef]
- Miljković, D. Methods for Attenuation of Unmanned Aerial Vehicle Noise. In Proceedings of the 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 21–25 May 2018; pp. 0914–0919. [Google Scholar]
- Alkmim, M.; Cardenuto, J.; Tengan, E.; Dietzen, T.; Van Waterschoot, T.; Cuenca, J.; De Ryck, L.; Desmet, W. Drone Noise Directivity and Psychoacoustic Evaluation Using a Hemispherical Microphone Array. J. Acoust. Soc. Am. 2022, 152, 2735–2745. [Google Scholar] [CrossRef]
- Hoshiba, H.; Noda, R.; Nakata, T.; Liu, H.; Senda, K.; Nakadai, K.; Okuno, H.G. Development of Surface-Processed Low-Noise Propeller for Search and Rescue Tasks with Drone Audition. In Proceedings of the Quiet Drones International e-Symposium on UAV/UAS Noise, Paris, France, 19–21 October 2020. [Google Scholar]
- Xie, Y.H.; Jiang, W.; Lu, K.; Zhang, D. Numerical Investigation into Energy Extraction of Flapping Airfoil with Gurney Flaps. Energy 2016, 109, 694–702. [Google Scholar] [CrossRef]
- Glegg, S.; Morin, B.; Atassi, O.; Reba, R. Using RANS Calculations of Turbulent Kinetic Energy to Provide Predictions of Trailing Edge Noise. In Proceedings of the 14th AIAA/CEAS Aeroacoustics Conference (29th AIAA Aeroacoustics Conference), Vancouver, BC, Canada, 5–7 May 2008; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2008. [Google Scholar]
- Remmler, S.; Christophe, J.; Anthoine, J.; Moreau, S. Computation of Wall Pressure Spectra from Steady Flow Data for Noise Prediction. AIAA J. 2010, 48, 1997–2007. [Google Scholar] [CrossRef]
- Moreau, D.J.; Doolan, C.J. Noise-Reduction Mechanism of a Flat-Plate Serrated Trailing Edge. AIAA J. 2013, 51, 2513–2522. [Google Scholar] [CrossRef]
- Chong, T.P.; Joseph, P.F.; Gruber, M. Airfoil Self Noise Reduction by Non-Flat Plate Type Trailing Edge Serrations. Appl. Acoust. 2013, 74, 607–613. [Google Scholar] [CrossRef]
- Lee, H.M.; Lu, Z.; Lim, K.M.; Xie, J.; Lee, H.P. Quieter Propeller with Serrated Trailing Edge. Appl. Acoust. 2019, 146, 227–236. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Propeller diameter [mm] | 380.40 | |
| Hub diameter [mm] | 27.39 | |
| Wing length, R [mm] | 190.20 | |
| Mean chord length, cm [mm] | 25.47 | |
| Rotational speed, Urot [rpm] | 4100 | |
| Wing tip velocity, Uref [m/s] | 81.66 | (Uref = 2πRUrot/60) |
| Reynolds number, Re [-] | 1.35 × 105 | (Re = cmUref/ν) |
| Standard | 3 mm_GF | 8 mm_GF | |
|---|---|---|---|
| First layer [mm] | 0.012 | 0.012 | 0.012 |
| Prism layers | 15 | 15 | 15 |
| Propeller surface mesh size [mm] | 0.3 | 0.3 | 0.3 |
| Total element number (×106) | 9.46 | 11.87 | 12.05 |
| Rotational speed [rpm] | 4100 | 3900 | 3800 |
| Reynolds number [-] | 1.35 × 105 | 1.28 × 105 | 1.25 × 105 |
| Standard | 3 mm_GF | 8 mm_GF | |
|---|---|---|---|
| Lift [N] | 3.798 | 3.850 (+1.3%) | 3.740 (−1.5%) |
| Drag [N] | 0.662 | 0.740 (+11.8%) | 0.819 (+23.6%) |
| Lift-to-drag ratio [-] | 5.734 | 5.200 (−9.3%) | 4.568 (−20.3%) |
| Torque [N·m] | 0.078 | 0.091 (+16.7%) | 0.103 (+32.4%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noda, R.; Hoshiba, K.; Komatsuzaki, I.; Nakata, T.; Liu, H. Near- and Far-Field Acoustic Characteristics and Sound Source Localization Performance of Low-Noise Propellers with Gapped Gurney Flap. Drones 2024, 8, 265. https://doi.org/10.3390/drones8060265
Noda R, Hoshiba K, Komatsuzaki I, Nakata T, Liu H. Near- and Far-Field Acoustic Characteristics and Sound Source Localization Performance of Low-Noise Propellers with Gapped Gurney Flap. Drones. 2024; 8(6):265. https://doi.org/10.3390/drones8060265
Chicago/Turabian StyleNoda, Ryusuke, Kotaro Hoshiba, Izumi Komatsuzaki, Toshiyuki Nakata, and Hao Liu. 2024. "Near- and Far-Field Acoustic Characteristics and Sound Source Localization Performance of Low-Noise Propellers with Gapped Gurney Flap" Drones 8, no. 6: 265. https://doi.org/10.3390/drones8060265
APA StyleNoda, R., Hoshiba, K., Komatsuzaki, I., Nakata, T., & Liu, H. (2024). Near- and Far-Field Acoustic Characteristics and Sound Source Localization Performance of Low-Noise Propellers with Gapped Gurney Flap. Drones, 8(6), 265. https://doi.org/10.3390/drones8060265