
Finite-Time Adaptive Quantized Control for Quadrotor Aerial Vehicle with Full States Constraints and Validation on QDrone Experimental Platform



Abstract
1. Introduction
- Introducing an adaptive neural network quantization controller to ensure convergence of all states within a constrained range in a finite time, maintaining them within this region and exhibiting reliable tracking performance.
- Incorporating a BLF boundary capable of online parameter adjustment in response to changing tracking errors facilitates achieving full state constraints for the quadrotor UAV and mitigates overshooting of tracking errors during transient processes.
- During recursive design of the controller, incorporating a filter compensation signal addresses filter-induced errors. Additionally, employing a smoothing function with an intermediate control law mitigates the effects of input quantization in the quadrotor UAV system.
- A finite-time adaptive neural network tracking control scheme based on a novel barrier Lyapunov function is proposed in this paper and successfully validated on a physical experimental platform.
2. Problem Formulation and Preliminaries
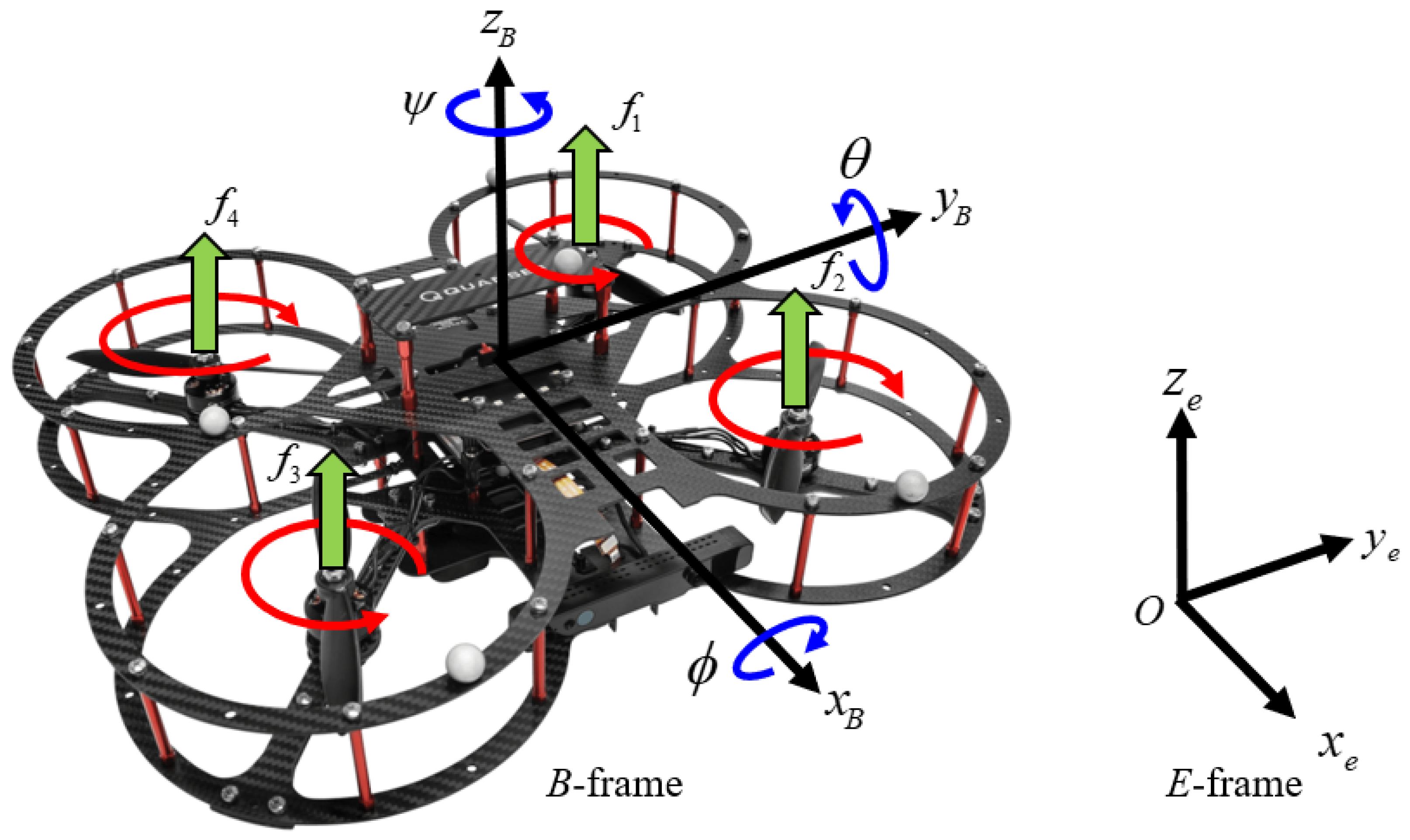
2.1. System Model of Quadrotor
2.2. Hysteretic Quantizer
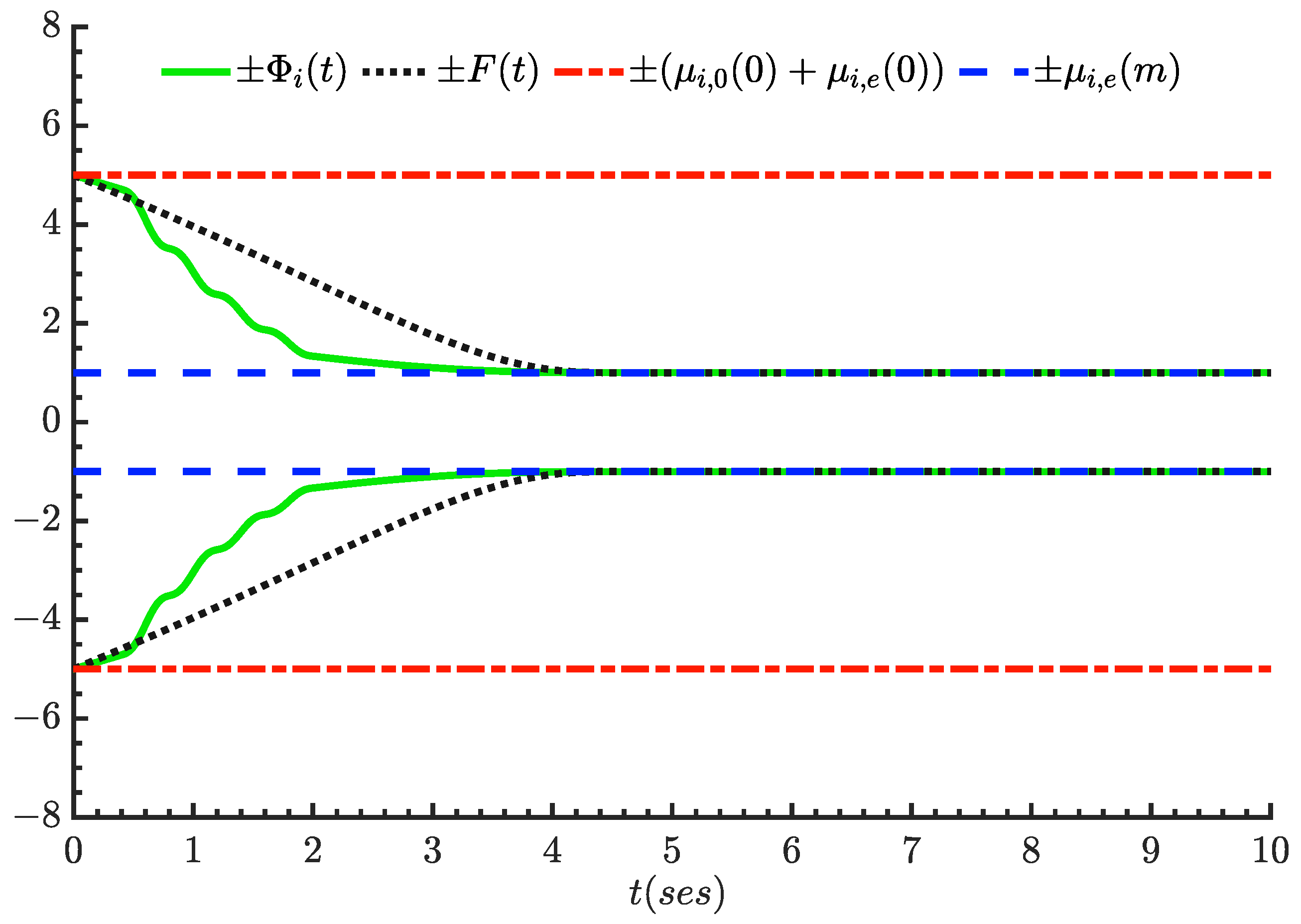
2.3. Novel Barrier Lyapunov Function
2.4. Radial Basis Function Neural Networks
3. Controller Design and Stability Analysis
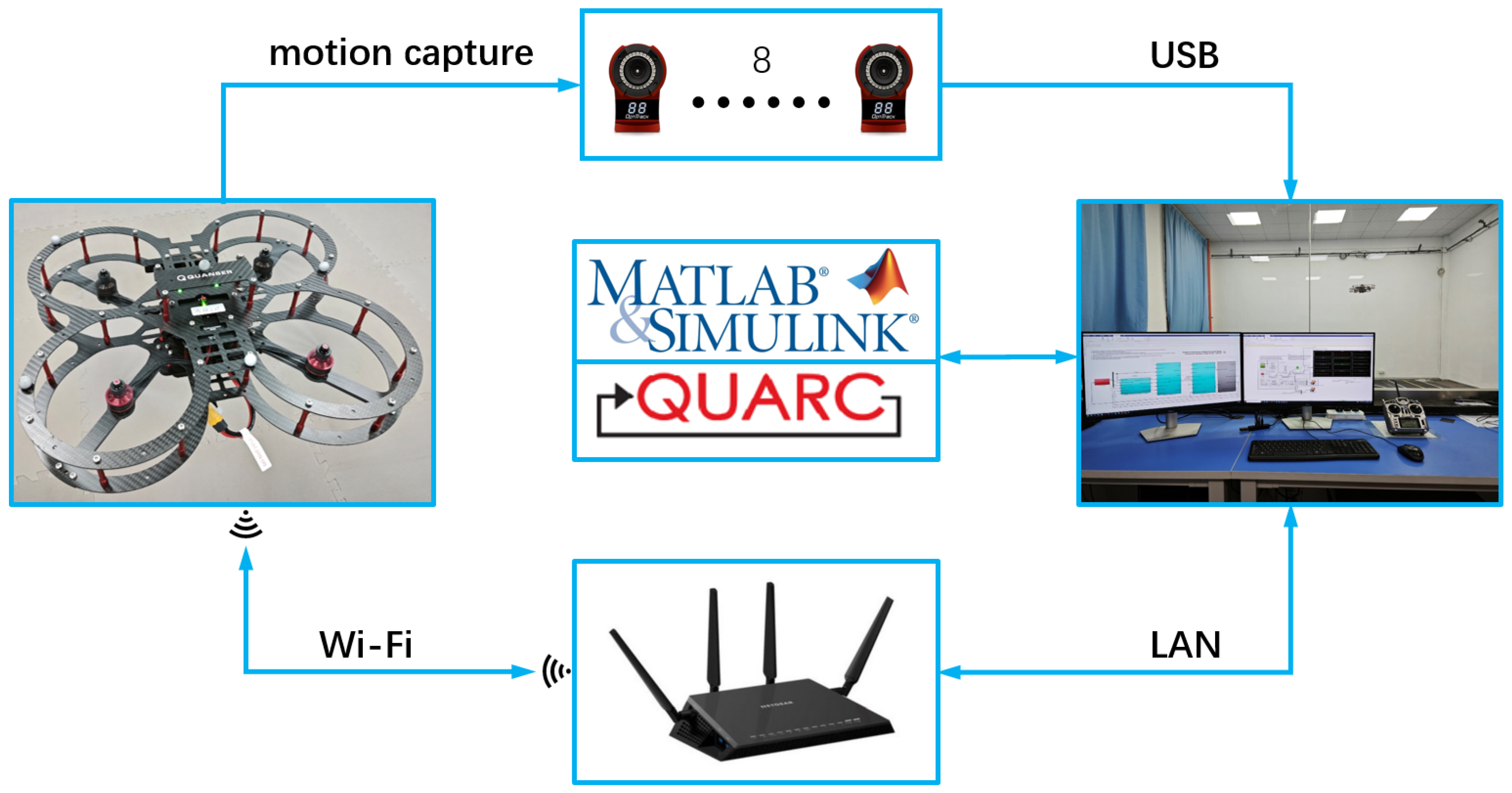
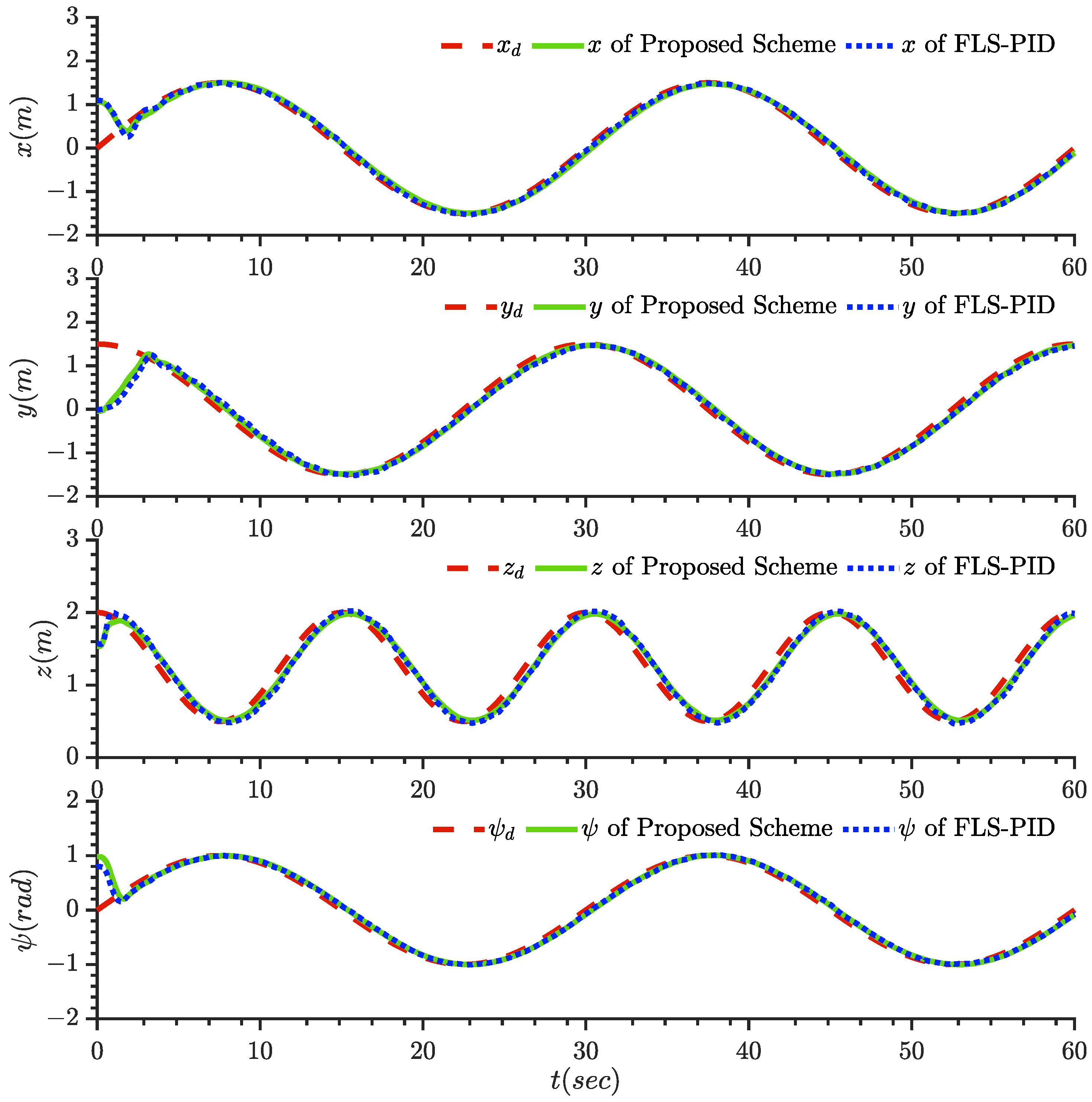
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, L.; Li, B.; Li, W.; BrandH, H.; Jiang, B.; Xiao, J. Concrete defects inspection and 3D mapping using CityFlyer quadrotor robot. IEEE CAA J. Autom. Sin. 2020, 7, 991–1002. [Google Scholar] [CrossRef]
- Gohari, P.S.; Mohammadi, H.; Taghvaei, S. Using chaotic maps for 3D boundary surveillance by quadrotor robot. Appl. Soft Comput. 2019, 76, 68–77. [Google Scholar] [CrossRef]
- Kanellakis, C.; Nikolakopoulos, G. Survey on computer vision for UAVs: Current developments and trends. J. Intell. Robot. Syst. 2017, 87, 141–168. [Google Scholar] [CrossRef]
- Cardona, G.A.; Ramirez-Rugeles, J.; Mojica-Nava, E.; Calderon, J.M. Visual victim detection and quadrotor-swarm coordination control in search and rescue environment. Int. J. Electr. Comput. Eng. 2021, 11, 2079. [Google Scholar] [CrossRef]
- Esfahlani, S.S. Mixed reality and remote sensing application of unmanned aerial vehicle in fire and smoke detection. J. Ind. Inf. Integr. 2019, 15, 42–49. [Google Scholar] [CrossRef]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring. Aerosp. Sci. Technol. 2022, 123, 107494. [Google Scholar] [CrossRef]
- Villa, D.K.; Brandao, A.S.; Sarcinelli-Filho, M. A survey on load transportation using multirotor uavs. J. Intell. Robot. Syst. 2020, 98, 267–296. [Google Scholar] [CrossRef]
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- Vu, N.A.; Dang, D.K.; Le Dinh, T. Electric propulsion system sizing methodology for an agriculture multicopter. Aerosp. Sci. Technol. 2019, 90, 314–326. [Google Scholar] [CrossRef]
- Zhu, G.; Li, H.; Zhang, H.; Wang, S.; Zhang, X. Adaptive dynamic surface output feedback control for a class of quadrotor aircraft with actuator faults. Assem. Autom. 2022, 42, 521–534. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Robust Fractional-Order Sliding Mode Tracker for Quad-Rotor UAVs: Event-Triggered Adaptive Backstepping Approach under Disturbance and Uncertainty. Aerosp. Sci. Technol. 2024, 146, 108916. [Google Scholar] [CrossRef]
- Cui, L.; Zhang, R.; Yang, H.; Zuo, Z. Adaptive super-twisting trajectory tracking control for an unmanned aerial vehicle under gust winds. Aerosp. Sci. Technol. 2021, 115, 106833. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R.; Wang, X.; Wang, X. Anti-saturation adaptive finite-time neural network based fault-tolerant tracking control for a quadrotor UAV with external disturbances. Aerosp. Sci. Technol. 2021, 115, 106790. [Google Scholar] [CrossRef]
- Urbina-Brito, N.; Guerrero-Sánchez, M.E.; Valencia-Palomo, G.; Hernández-González, O.; López-Estrada, F.R.; Hoyo-Montaño, J.A. A predictive control strategy for aerial payload transportation with an unmanned aerial vehicle. Mathematics 2021, 9, 1822. [Google Scholar] [CrossRef]
- Ngo, K.; Mahony, R.; Jiang, Z.P. Integrator Backstepping using Barrier Functions for Systems with Multiple State Constraints. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 8306–8312. [Google Scholar]
- Wang, C.; Wang, F.; Yu, J. BLF-based asymptotic tracking control for a class of time-varying full state constrained nonlinear systems. Trans. Inst. Meas. Control. 2019, 41, 3043–3052. [Google Scholar] [CrossRef]
- Hua, C.; Jiang, A.; Li, K. Adaptive neural network finite-time tracking quantized control for uncertain nonlinear systems with full-state constraints and applications to QUAVs. Neurocomputing 2021, 440, 264–274. [Google Scholar] [CrossRef]
- Liu, L.; Gao, T.; Liu, Y.J.; Tong, S.; Chen, C.P.; Ma, L. Time-varying IBLFs-based adaptive control of uncertain nonlinear systems with full state constraints. Automatica 2021, 129, 109595. [Google Scholar] [CrossRef]
- Liu, C.; Liu, X.; Wang, H.; Zhou, Y.; Lu, S. Finite-time adaptive tracking control for unknown nonlinear systems with a novel barrier Lyapunov function. Inf. Sci. 2020, 528, 231–245. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, C.; Yang, G. Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE Trans. Autom. Control 2013, 59, 460–464. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Zhu, G.; Chen, X.; Li, Z.; Wang, C.; Su, C.Y. Compound adaptive fuzzy quantized control for quadrotor and its experimental verification. IEEE Trans. Cybern. 2020, 51, 1121–1133. [Google Scholar] [CrossRef]
- Shao, X.; Xu, L.; Zhang, W. Quantized Control Capable of Appointed-Time Performances for Quadrotor Attitude Tracking: Experimental Validation. IEEE Trans. Ind. Electron. 2022, 69, 5100–5110. [Google Scholar] [CrossRef]
- Sun, K.; Karimi, H.R.; Qiu, J. Finite-time fuzzy adaptive quantized output feedback control of triangular structural systems. Inf. Sci. 2021, 557, 153–169. [Google Scholar] [CrossRef]
- Yu, X.; Lin, Y. Adaptive backstepping quantized control for a class of nonlinear systems. IEEE Trans. Autom. Control 2016, 62, 981–985. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, Y.; Huang, T.; Ma, H. Prescribed performance cooperative control for multiagent systems with input quantization. IEEE Trans. Cybern. 2019, 50, 1810–1819. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Li, K.; Tong, S. Finite-time adaptive fuzzy output feedback dynamic surface control for MIMO nonstrict feedback systems. IEEE Trans. Fuzzy Syst. 2018, 27, 96–110. [Google Scholar] [CrossRef]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar] [PubMed]
- Sun, K.; Qiu, J.; Karimi, H.R.; Fu, Y. Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2020, 29, 1460–1471. [Google Scholar] [CrossRef]
- Dong, W.; Farrell, J.A.; Polycarpou, M.M.; Djapic, V.; Sharma, M. Command filtered adaptive backstepping. IEEE Trans. Control Syst. Technol. 2011, 20, 566–580. [Google Scholar] [CrossRef]
- Rabah, M.; Rohan, A.; Mohamed, S.A.S.; Kim, S.H. Autonomous Moving Target-Tracking for a UAV Quadcopter Based on Fuzzy-PI. IEEE Access 2019, 7, 38407–38419. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values | Units |
|---|---|---|
| m | kg | |
| k | ||
| l | m | |
| Section | Values |
|---|---|
| BLF | , |
| HQ | |
| RBFNNs | , , |
| Controller |
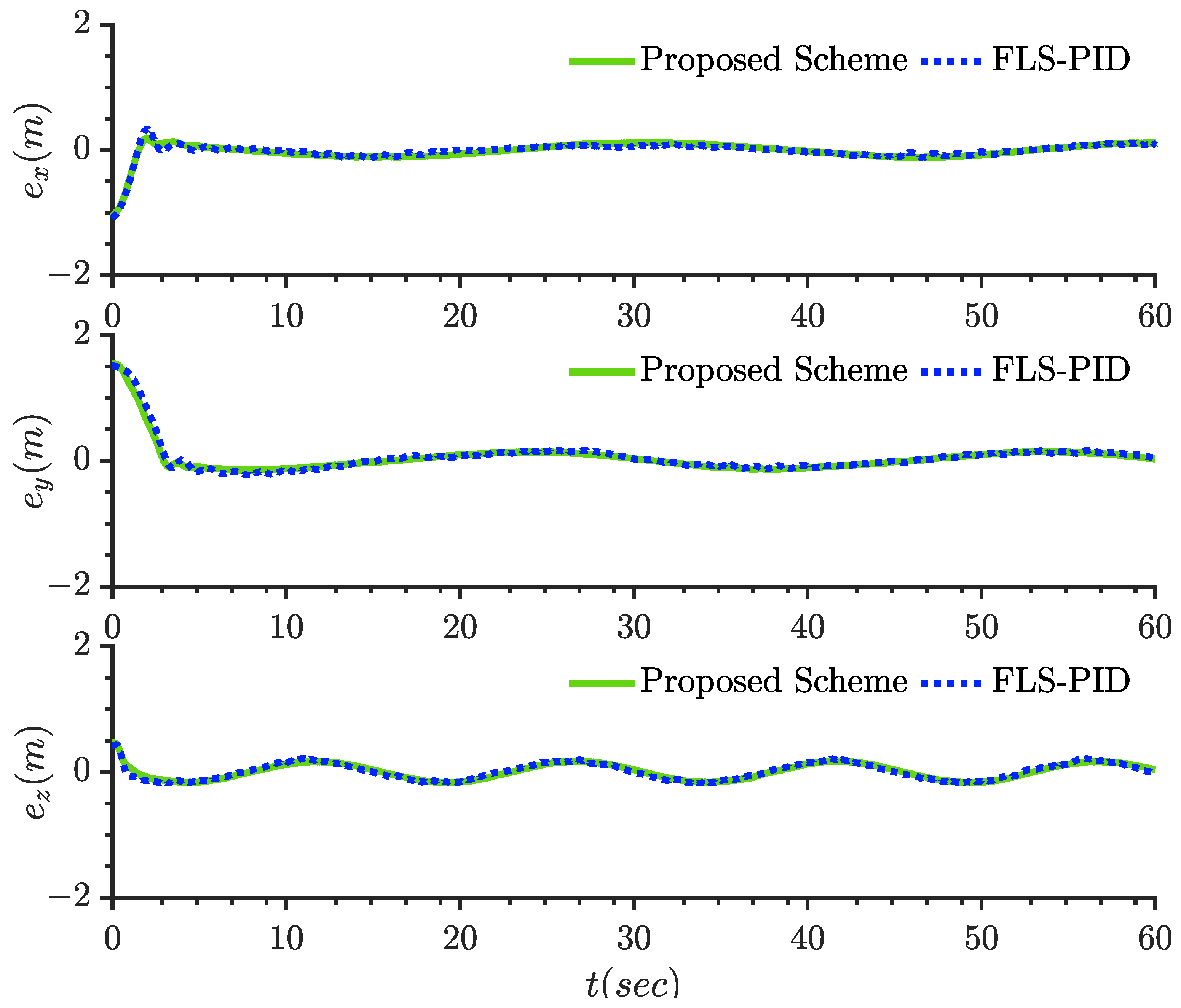
| State | Proposed Scheme | FLS-PID | ||
|---|---|---|---|---|
| MVYE | RMSVTE | MVYE | RMSVTE | |
| x | ||||
| y | ||||
| z | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, H.; Zhu, G.; Zhang, Y.; Wang, C.; Wang, Y.; Su, C.-Y. Finite-Time Adaptive Quantized Control for Quadrotor Aerial Vehicle with Full States Constraints and Validation on QDrone Experimental Platform. Drones 2024, 8, 264. https://doi.org/10.3390/drones8060264
Zhang X, Li H, Zhu G, Zhang Y, Wang C, Wang Y, Su C-Y. Finite-Time Adaptive Quantized Control for Quadrotor Aerial Vehicle with Full States Constraints and Validation on QDrone Experimental Platform. Drones. 2024; 8(6):264. https://doi.org/10.3390/drones8060264
Chicago/Turabian StyleZhang, Xiuyu, He Li, Guoqiang Zhu, Yanhui Zhang, Chenliang Wang, Yang Wang, and Chun-Yi Su. 2024. "Finite-Time Adaptive Quantized Control for Quadrotor Aerial Vehicle with Full States Constraints and Validation on QDrone Experimental Platform" Drones 8, no. 6: 264. https://doi.org/10.3390/drones8060264
APA StyleZhang, X., Li, H., Zhu, G., Zhang, Y., Wang, C., Wang, Y., & Su, C.-Y. (2024). Finite-Time Adaptive Quantized Control for Quadrotor Aerial Vehicle with Full States Constraints and Validation on QDrone Experimental Platform. Drones, 8(6), 264. https://doi.org/10.3390/drones8060264