
Prescribed Performance Fault-Tolerant Attitude Tracking Control for UAV with Actuator Faults


Abstract
1. Introduction
- (1)
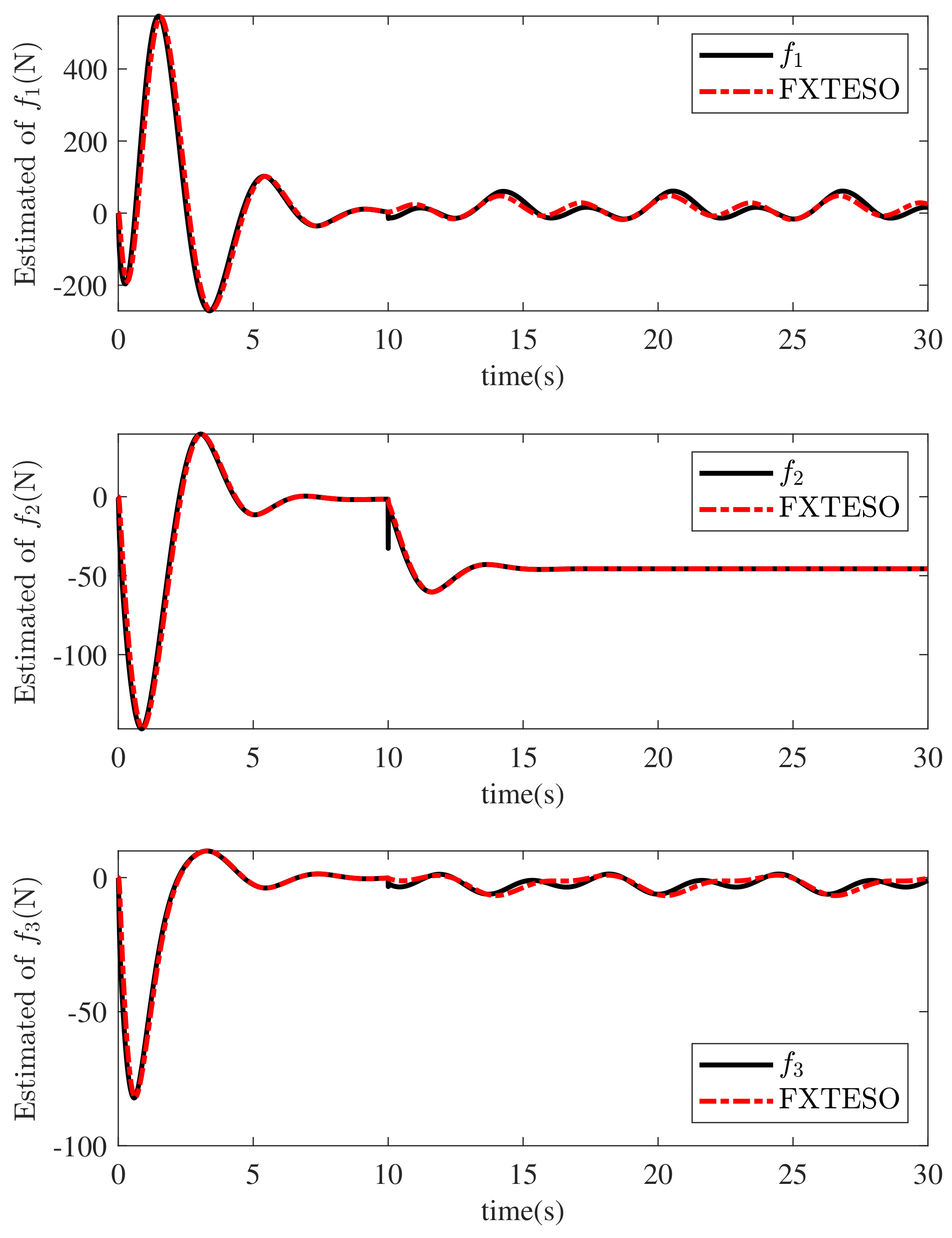
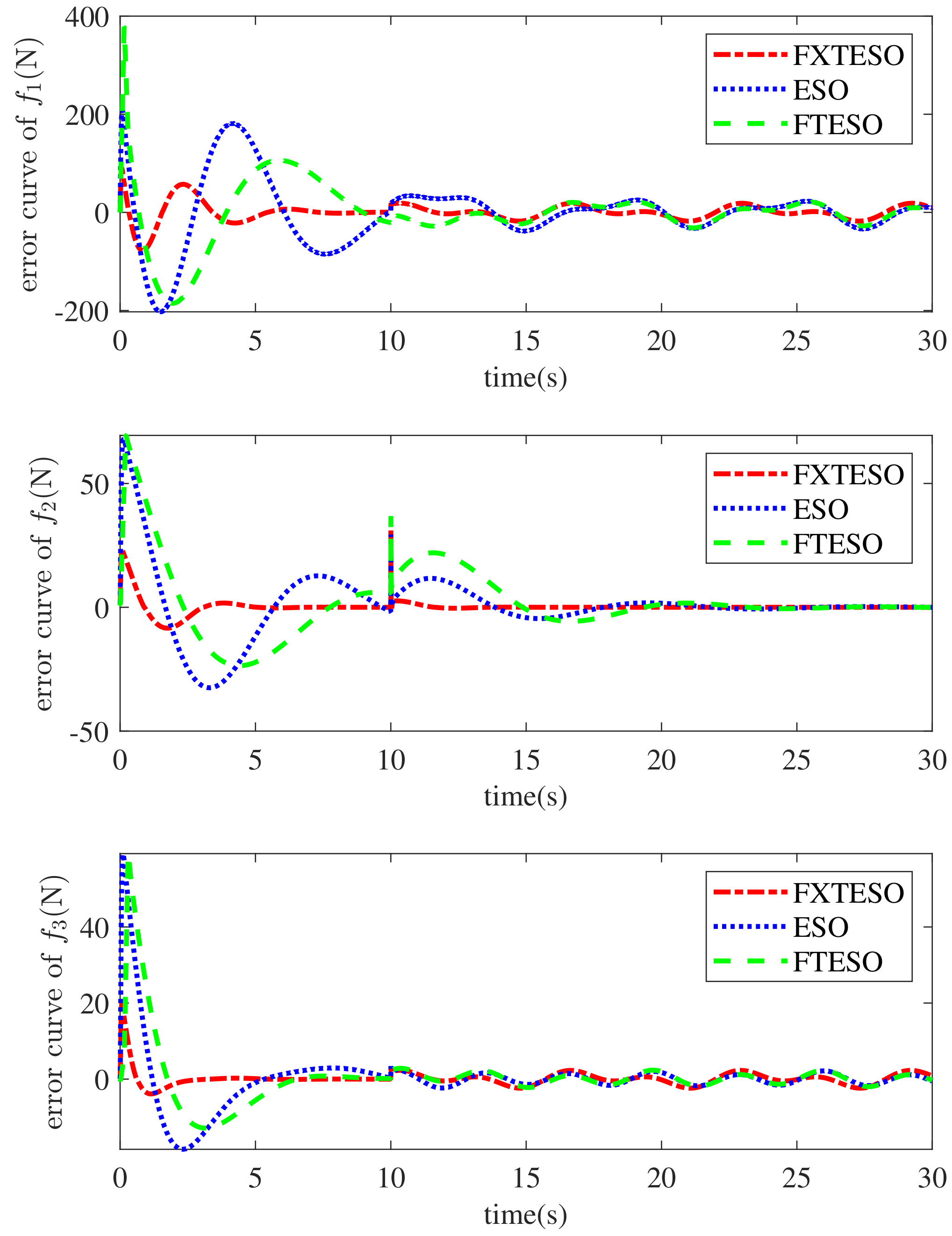
- A fixed-time extended state observer is utilized to estimate the model’s external perturbations and actuator faults. Different from traditional ESO and FTESO, the FXTESO proposed in this paper achieves fixed-time stability, and the convergence time is independent of the initial conditions.
- (2)
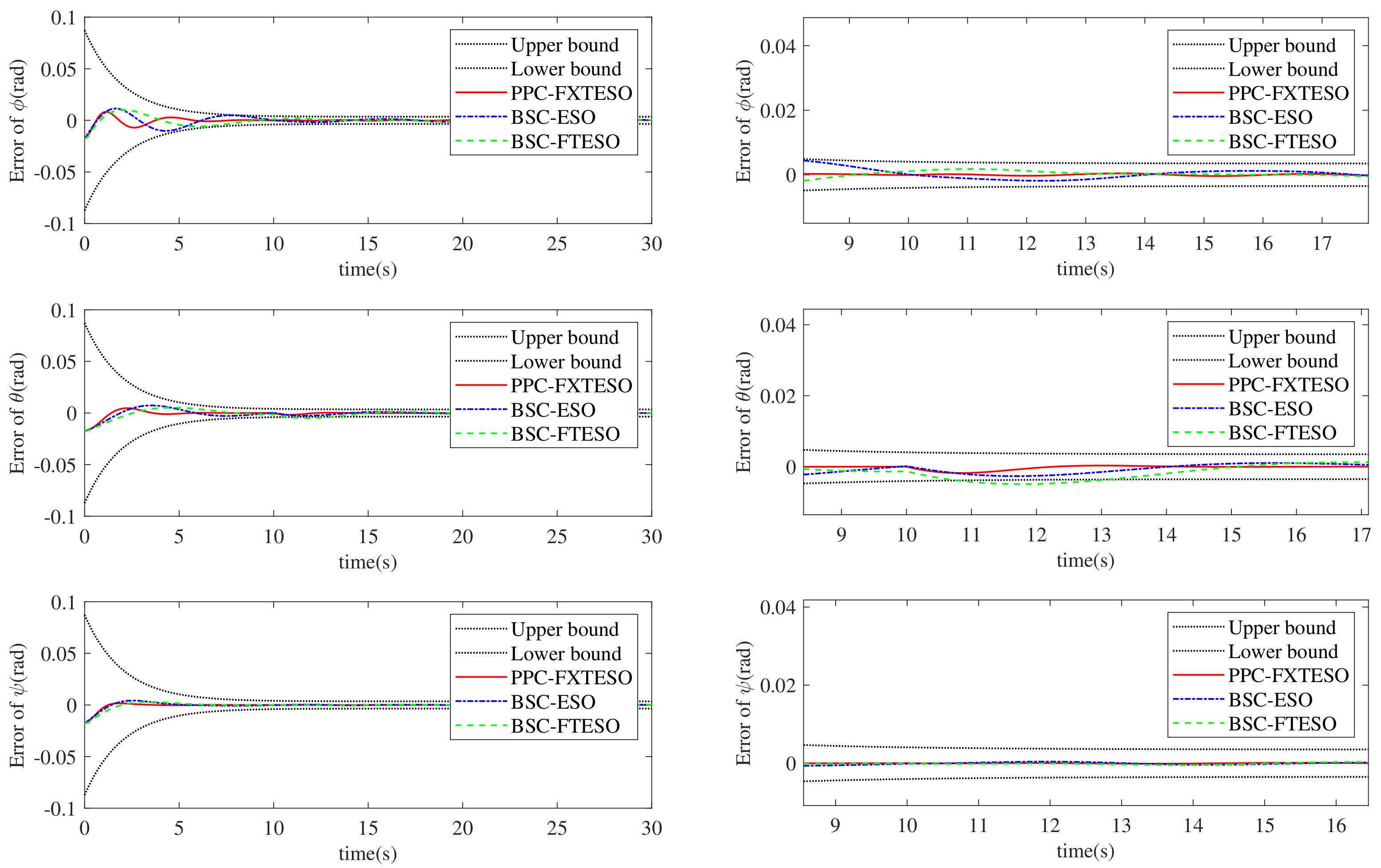
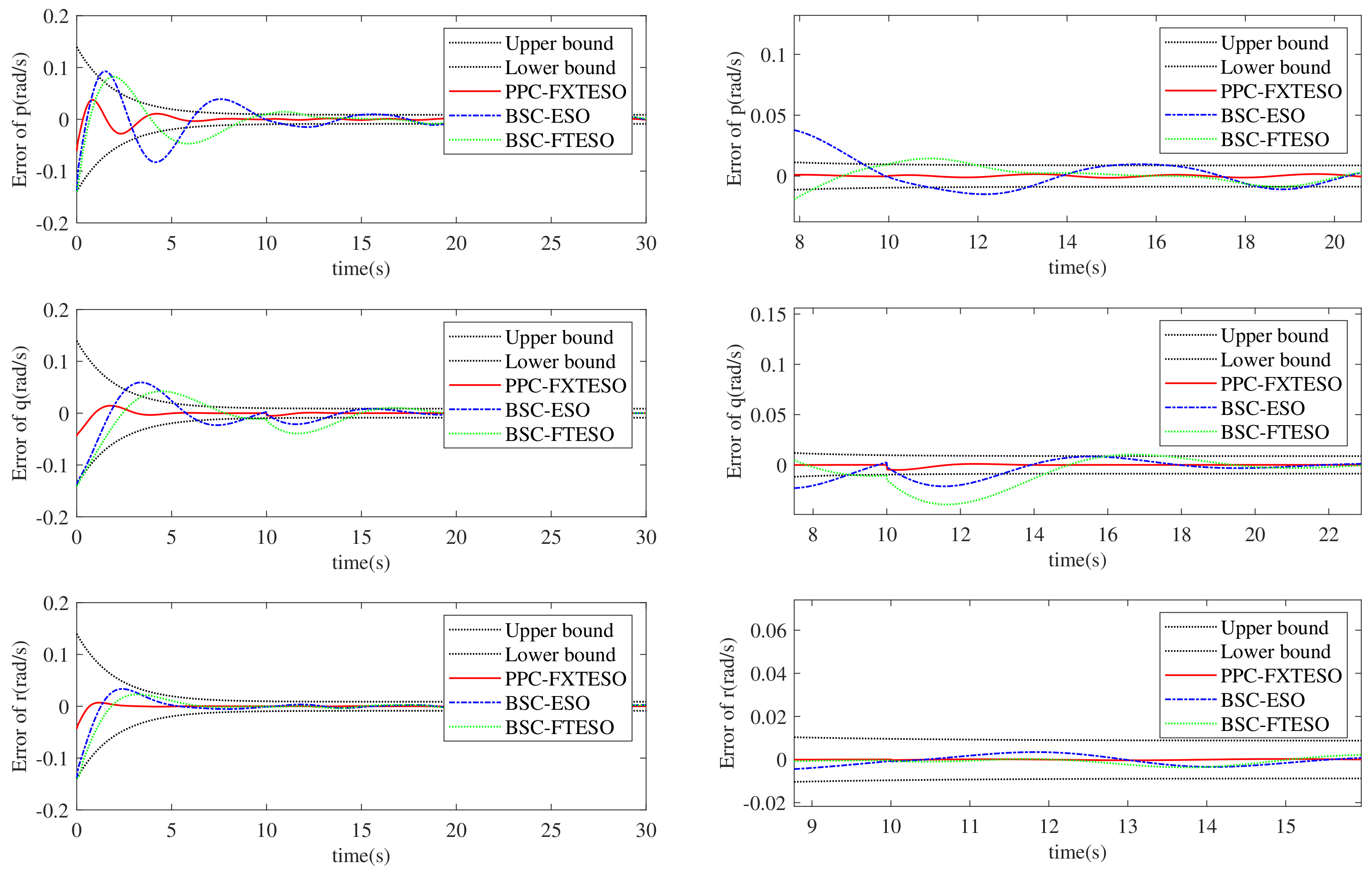
- The proposed control scheme ensures that the carrier-based UAV tracks the desired attitude angle according to the prescribed performance requirements. The controller design considers the PPC constraints on attitude tracking errors and combines the PPC with the BLF to achieve the desired attitude tracking control objectives.
2. Problem Formulation
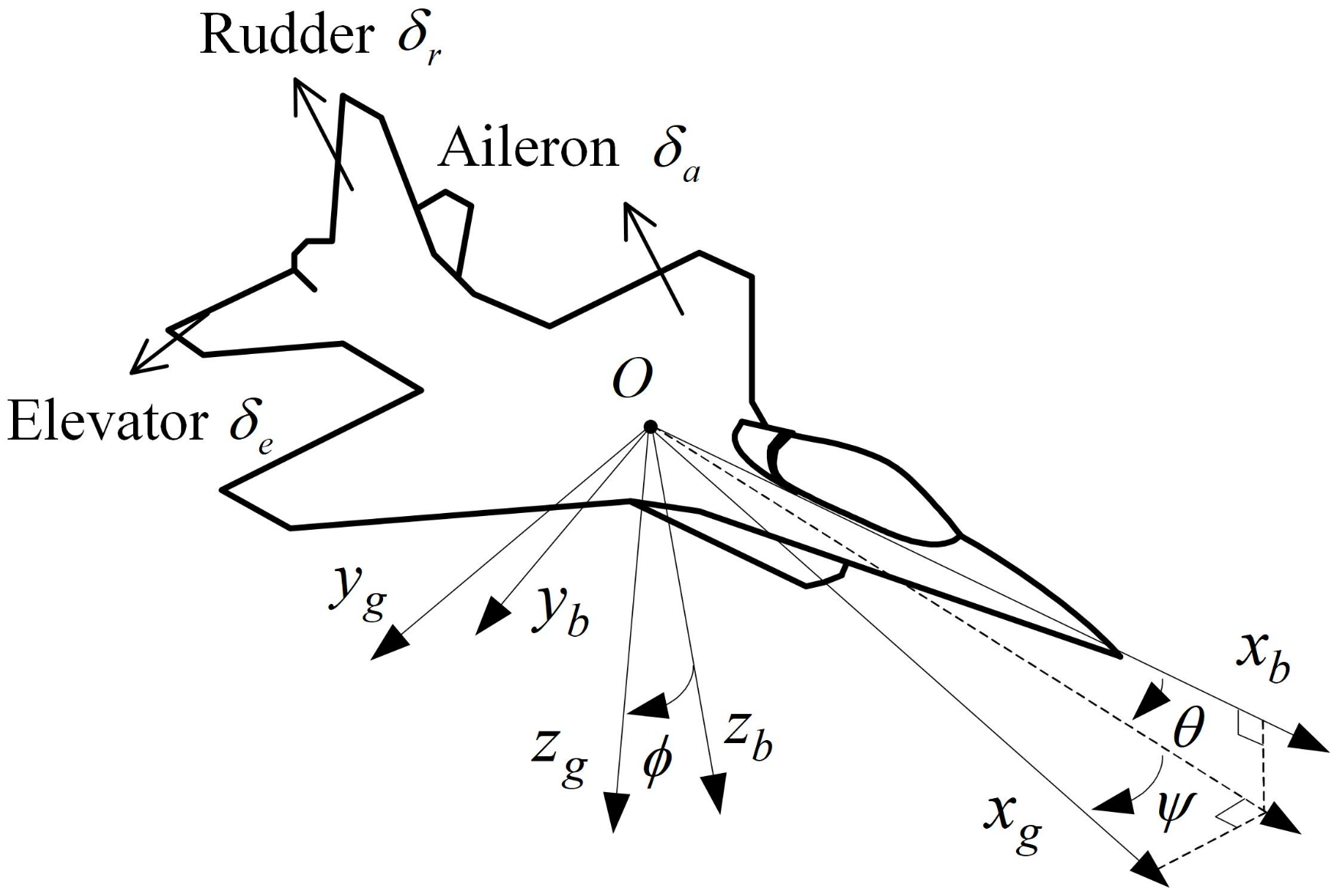
2.1. Model of the UAV
2.2. Actuator Faults
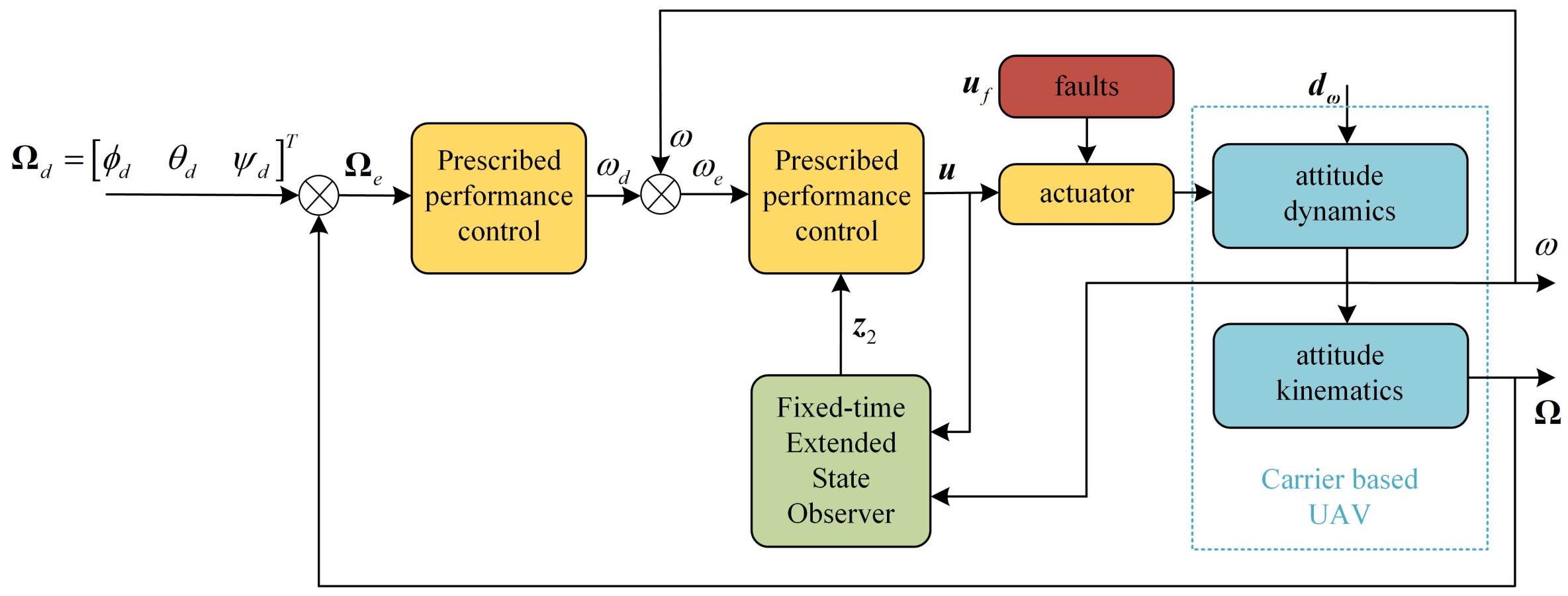
3. Carrier-Based UAV Attitude Controller Design
3.1. FXTESO Design
3.2. FXTESO-Based Prescribed Performance Controller Design for Attitude System
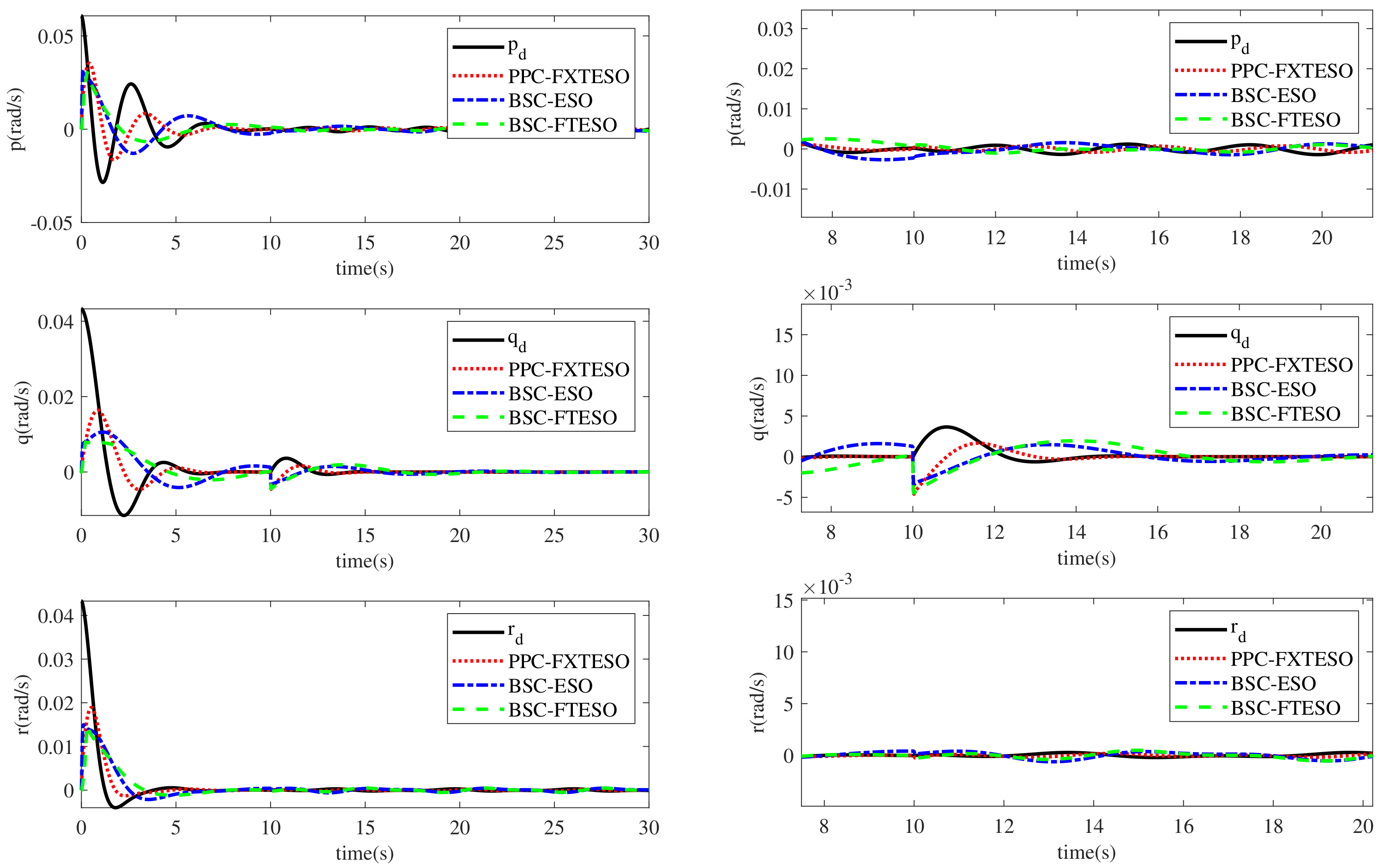
4. Simulation and Analysis
Stability Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Emami, S.A.; Banazadeh, A. Online identification of aircraft dynamics in the presence of actuator faults. J. Intell. Robot. Syst. 2019, 96, 541–553. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, X.; Ren, Z.; Cooper, J. Fault-tolerant control for commercial aircraft with actuator faults and constraints. J. Frankl. Inst. 2019, 356, 3849–3868. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; He, W. Adaptive fault-tolerant control for a nonlinear flexible aircraft wing system. Asian J. Control 2019, 21, 2340–2351. [Google Scholar] [CrossRef]
- Rudin, K.; Ducard, G.J.; Siegwart, R.Y. Active fault-tolerant control with imperfect fault detection information: Applications to UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2792–2805. [Google Scholar] [CrossRef]
- Yan, K.; Wu, Q.; Yang, C.; Chen, M. Backstepping-based Adaptive Fault-Tolerant Control Design for Satellite Attitude System. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 176–181. [Google Scholar]
- Jiang, Y.; Hu, Q.; Ma, G. Adaptive backstepping fault-tolerant control for flexible spacecraft with unknown bounded disturbances and actuator failures. ISA Trans. 2010, 49, 57–69. [Google Scholar] [CrossRef]
- Shen, Q.; Yue, C.; Goh, C.H.; Wang, D. Active fault-tolerant control system design for spacecraft attitude maneuvers with actuator saturation and faults. IEEE Trans. Ind. Electron. 2018, 66, 3763–3772. [Google Scholar] [CrossRef]
- Huo, J.; Meng, T.; Jin, Z. Adaptive Backstepping Sliding Mode Fault Tolerant Control for Satellite Attitude under Actuator Faults. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 608, p. 012040. [Google Scholar]
- Guo, F.; Lu, P. Improved adaptive integral-sliding-mode fault-tolerant control for hypersonic vehicle with actuator fault. IEEE Access 2021, 9, 46143–46151. [Google Scholar] [CrossRef]
- Du, Y.; Huang, P.; Cheng, Y.; Fan, Y.; Yuan, Y. Fault tolerant control of a quadrotor unmanned aerial vehicle based on active disturbance rejection control and two-stage Kalman filter. IEEE Access 2023, 11, 67556–67566. [Google Scholar] [CrossRef]
- Jung, W.; Bang, H. Fault and failure tolerant model predictive control of quadrotor UAV. Int. J. Aeronaut. Space Sci. 2021, 22, 663–675. [Google Scholar] [CrossRef]
- Hu, C.; Cao, L.; Zhou, X.; Sun, B.; Wang, N. Fuzzy adaptive nonlinear sensor-fault tolerant control for a quadrotor unmanned aerial vehicle. Asian J. Control 2020, 22, 1163–1176. [Google Scholar] [CrossRef]
- Nian, X.; Chen, W.; Chu, X.; Xu, Z. Robust adaptive fault estimation and fault tolerant control for quadrotor attitude systems. Int. J. Control 2020, 93, 725–737. [Google Scholar] [CrossRef]
- Gómez-Peñate, S.; López-Estrada, F.R.; Valencia-Palomo, G.; Rotondo, D.; Guerrero-Sánchez, M.E. Actuator and sensor fault estimation based on a proportional multiple-integral sliding mode observer for linear parameter varying systems with inexact scheduling parameters. Int. J. Robust Nonlinear Control 2021, 31, 8420–8441. [Google Scholar] [CrossRef]
- Guzman, J.; López-Estrada, F.R.; Estrada-Manzo, V.; Valencia-Palomo, G. Actuator fault estimation based on a proportional-integral observer with nonquadratic Lyapunov functions. Int. J. Syst. Sci. 2021, 52, 1938–1951. [Google Scholar] [CrossRef]
- Gong, L.G.; Wang, Q.; Dong, C.Y. Spacecraft output feedback attitude control based on extended state observer and adaptive dynamic programming. J. Frankl. Inst. 2019, 356, 4971–5000. [Google Scholar] [CrossRef]
- Ma, X.; Liu, S.; Cheng, H. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion. J. Syst. Eng. Electron. 2022, 33, 180–187. [Google Scholar] [CrossRef]
- Tang, P.; Lin, D.; Zheng, D.; Fan, S.; Ye, J. Observer based finite-time fault tolerant quadrotor attitude control with actuator faults. Aerosp. Sci. Technol. 2020, 104, 105968. [Google Scholar] [CrossRef]
- Wu, X.; Luo, S.; Wei, C.; Liao, Y. Observer-based fault-tolerant attitude tracking control for rigid spacecraft with actuator saturation and faults. Acta Astronaut. 2021, 178, 824–834. [Google Scholar] [CrossRef]
- Shao, X.; Wang, L.; Li, J.; Liu, J. High-order ESO based output feedback dynamic surface control for quadrotors under position constraints and uncertainties. Aerosp. Sci. Technol. 2019, 89, 288–298. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2011, 57, 2106–2110. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Int. J. Control 2014, 87, 363–370. [Google Scholar] [CrossRef]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X.; Li, S. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Circuits Syst. II Express Briefs 2016, 64, 151–155. [Google Scholar]
- Zhao, J.; Feng, D.; Cui, J.; Wang, X. Finite-time extended state observer-based fixed-time attitude control for hypersonic vehicles. Mathematics 2022, 10, 3162. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. Finite-time prescribed performance control for spacecraft attitude tracking. IEEE/ASME Trans. Mechatron. 2021, 27, 3087–3098. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Cabecinhas, D.; Pascoal, A.; Zhang, W. Prescribed performance path following control of USVs via an output-based threshold rule. IEEE Trans. Veh. Technol. 2023, 73, 6171–6182. [Google Scholar]
- Guan, Z.; Ma, Y.; Zheng, Z.; Guo, N. Prescribed performance control for automatic carrier landing with disturbance. Nonlinear Dyn. 2018, 94, 1335–1349. [Google Scholar] [CrossRef]
- He, M.; Rong, T.; Li, J.; He, C. Adaptive dynamic surface full state constraints control for stochastic Markov jump systems based on event-triggered strategy. Appl. Math. Comput. 2021, 392, 125563. [Google Scholar] [CrossRef]
- Lin, Y.; Zhuang, G.; Sun, W.; Zhao, J.; Chu, Y. Resilient H∞ dynamic output feedback controller design for USJSs with time-varying delays. Appl. Math. Comput. 2021, 395, 125875. [Google Scholar]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Li, D.P.; Liu, Y.J.; Tong, S.; Chen, C.P.; Li, D.J. Neural networks-based adaptive control for nonlinear state constrained systems with input delay. IEEE Trans. Cybern. 2018, 49, 1249–1258. [Google Scholar] [CrossRef]
- Shao, X.; Hu, Q.; Shi, Y.; Jiang, B. Fault-tolerant prescribed performance attitude tracking control for spacecraft under input saturation. IEEE Trans. Control Syst. Technol. 2018, 28, 574–582. [Google Scholar] [CrossRef]
- Mohammadi, A.; Ramezani, A. A robust model predictive control-based method for fault detection and fault tolerant control of quadrotor UAV. Trans. Inst. Meas. Control 2023, 45, 37–48. [Google Scholar] [CrossRef]
- Xiao, H.; Zhen, Z.; Xue, Y. Fault-tolerant attitude tracking control for carrier-based aircraft using RBFNN-based adaptive second-order sliding mode control. Aerosp. Sci. Technol. 2023, 139, 108408. [Google Scholar] [CrossRef]
- Xu, Y.H.; Liu, X.; Zhou, W.; Yu, G. Generative adversarial LSTM networks learning for resource allocation in UAV-served M2M communications. IEEE Wirel. Commun. Lett. 2021, 10, 1601–1605. [Google Scholar] [CrossRef]
- Sun, Q.; Yan, Y.; Xu, Y.; Yu, J. Multidimensional-Taylor-network-based robust optimal tracking control for MIMO nonlinear discrete-time systems. ISA Trans. 2023, 142, 606–614. [Google Scholar] [CrossRef] [PubMed]
- Zheng, F.; Zhen, Z.; Gong, H. Observer-based backstepping longitudinal control for carrier-based UAV with actuator faults. J. Syst. Eng. Electron. 2017, 28, 322–377. [Google Scholar]
- Yao, Z.; Kan, Z.; Zhen, C.; Shao, H.; Li, D. Fault-Tolerant control for carrier-based UAV based on sliding mode method. Drones 2023, 7, 194. [Google Scholar] [CrossRef]
- Xue, Y.; Zhen, Z.; Yang, L.; Wen, L. Adaptive fault-tolerant control for carrier-based UAV with actuator failures. Aerosp. Sci. Technol. 2020, 107, 106227. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.h.; Chang, B.; Wu, W.h. Adaptive constrained backstepping controller with prescribed performance methodology for carrier-based UAV. Aerosp. Sci. Technol. 2019, 92, 55–65. [Google Scholar] [CrossRef]
- Denham, J.W. Project MAGIC CARPET: “Advanced controls and displays for precision carrier landings. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; p. 1770. [Google Scholar]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Hu, Q.; Shao, X.; Guo, L. Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance. IEEE/ASME Trans. Mechatron. 2017, 23, 331–341. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Basin, M.; Yu, P.; Shtessel, Y. Finite-and fixed-time differentiators utilising HOSM techniques. IET Control Theory Appl. 2017, 11, 1144–1152. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meaning | Symbol | Value |
|---|---|---|
| Wing area | S | |
| Wing span | b | |
| Mean aerodynamic chord | c | |
| Roll moment of inertia | ||
| Pith moment of inertia | ||
| Yaw moment of inertia | ||
| Product moment of inertia |
| Channels | PPC-FXTESO | BSC-FTESO | BSC-ESO | |||
|---|---|---|---|---|---|---|
| Overshoot | Time | Overshoot | Time | Overshoot | Time | |
| p | ||||||
| q | ||||||
| r | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Zhu, Q. Prescribed Performance Fault-Tolerant Attitude Tracking Control for UAV with Actuator Faults. Drones 2024, 8, 204. https://doi.org/10.3390/drones8050204
Wu Q, Zhu Q. Prescribed Performance Fault-Tolerant Attitude Tracking Control for UAV with Actuator Faults. Drones. 2024; 8(5):204. https://doi.org/10.3390/drones8050204
Chicago/Turabian StyleWu, Qilong, and Qidan Zhu. 2024. "Prescribed Performance Fault-Tolerant Attitude Tracking Control for UAV with Actuator Faults" Drones 8, no. 5: 204. https://doi.org/10.3390/drones8050204
APA StyleWu, Q., & Zhu, Q. (2024). Prescribed Performance Fault-Tolerant Attitude Tracking Control for UAV with Actuator Faults. Drones, 8(5), 204. https://doi.org/10.3390/drones8050204