
Intelligent Packet Priority Module for a Network of Unmanned Aerial Vehicles Using Manhattan Long Short-Term Memory
 , and
, and 
Abstract
1. Introduction
- (1)
- Design and implementation of an IPPM using a deep learning algorithm, MaLSTM, in a NS-3 environment with a Python binding module;
- (2)
- Via the proposed IPPM, provision of an efficient solution to a number of issues induced by interfering nodes, related to minimizing delays and increasing PDR in wireless communication between UAVs and their GCS.
2. Related Work
2.1. UAV
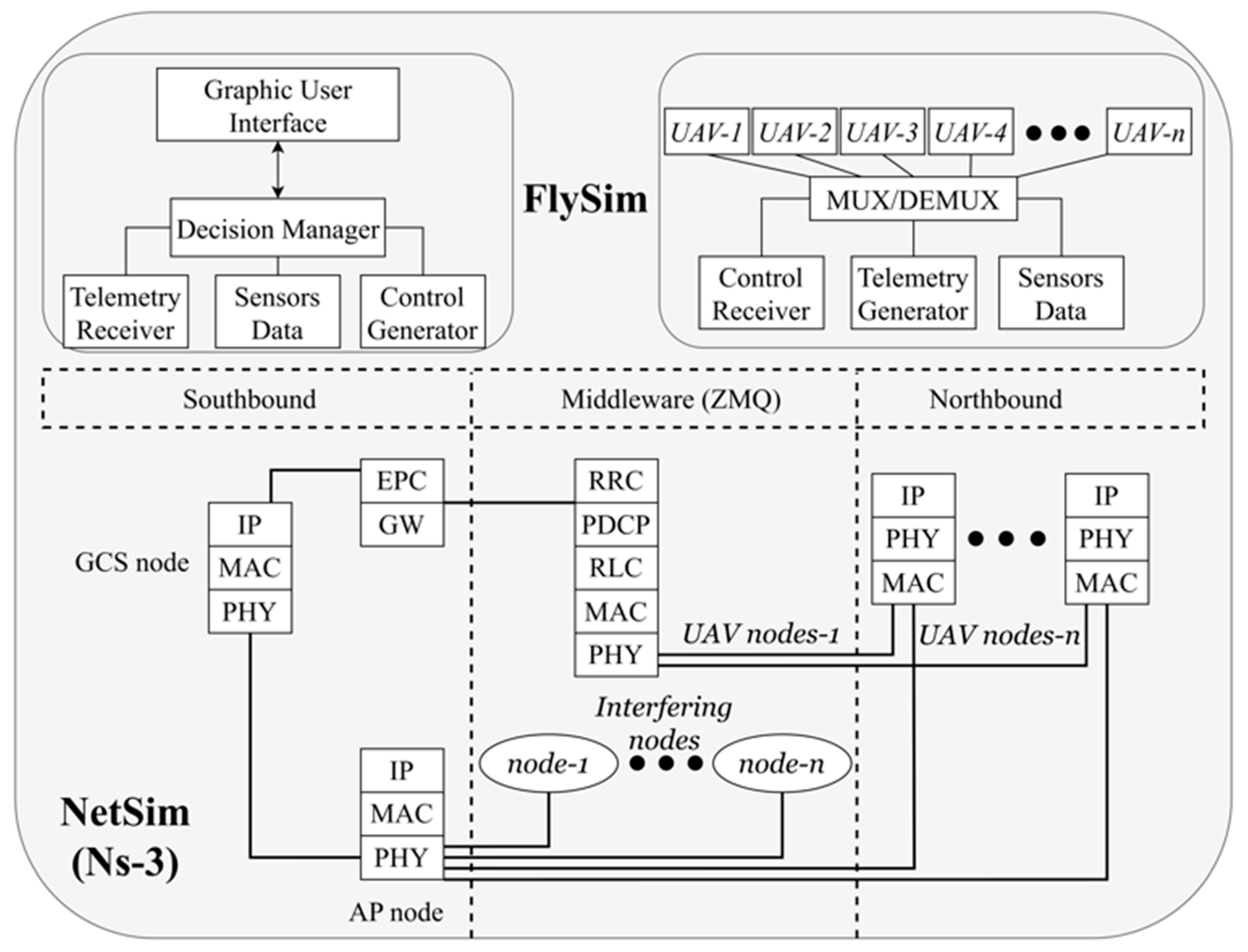
2.2. Flynet Simulator
- A fly simulator facilitates the launch and operation of UAVs, GCS, and visualization tools;
- A network simulator replicates the real-world network architecture and its surrounding nodes that compete with each other;
- Middleware enables bidirectional network communications based on ZeroMQ;
- Autogen is proposed for the purpose of creating a comprehensive map of the various components of the UAV, including sensors, as well as their corresponding network nodes.
2.3. Machine Learning for Priority-Related Module
3. Proposed Method
3.1. Intelligent Packet Priority Architecture
3.2. IPPM Algorithm
| Algorithm 1. Intelligent Packet Priority Module Algorithm | |
| Input: Arriving packets Output: Packets queue | |
| 1: 2: 3: 4: 5: 6: 7: 8: 9: 10: 11: 12: 13: 14: 15: 16: 17: 18: 19: 20: 21: 22: 23: 24: 25: 26: 27: 28: 29: 30: 31: 32: 33: 34: 35: 36: 37: 38: | Initialize PacketQueue Initialize PrioritizedPacketList Initialize InterferingPacketList Function classify_packets(packet) If packet comes from UAV or GCS Predict priority using MaLSTM model If packet is prioritized Add packet to PrioritizedPacketList Else Add packet to InterferingPacketList End If Else If packet comes from an interfering node Add packet to InterferingPacketList End If End Function Function process_packet_queue() While PacketQueue is not empty packet <- get next packet from PacketQueue classify_packets(packet) End While End Function Function send_packets() For each prioritized_packet in PrioritizedPacketList send prioritized_packet End For available_slots <- QueueCapacity - size(PrioritizedPacketList) If available_slots > 0 interfering_packets_to_send <- get first N packets from InterferingPacketList where N is available_slots For each interfering_packet in interfering_packets_to_send send interfering_packet End For End If End Function While True process_packet_queue() send_packets() Wait for next packet arrival or time interval End While |
3.3. Model Architecture
3.4. Packet Pairs Dataset
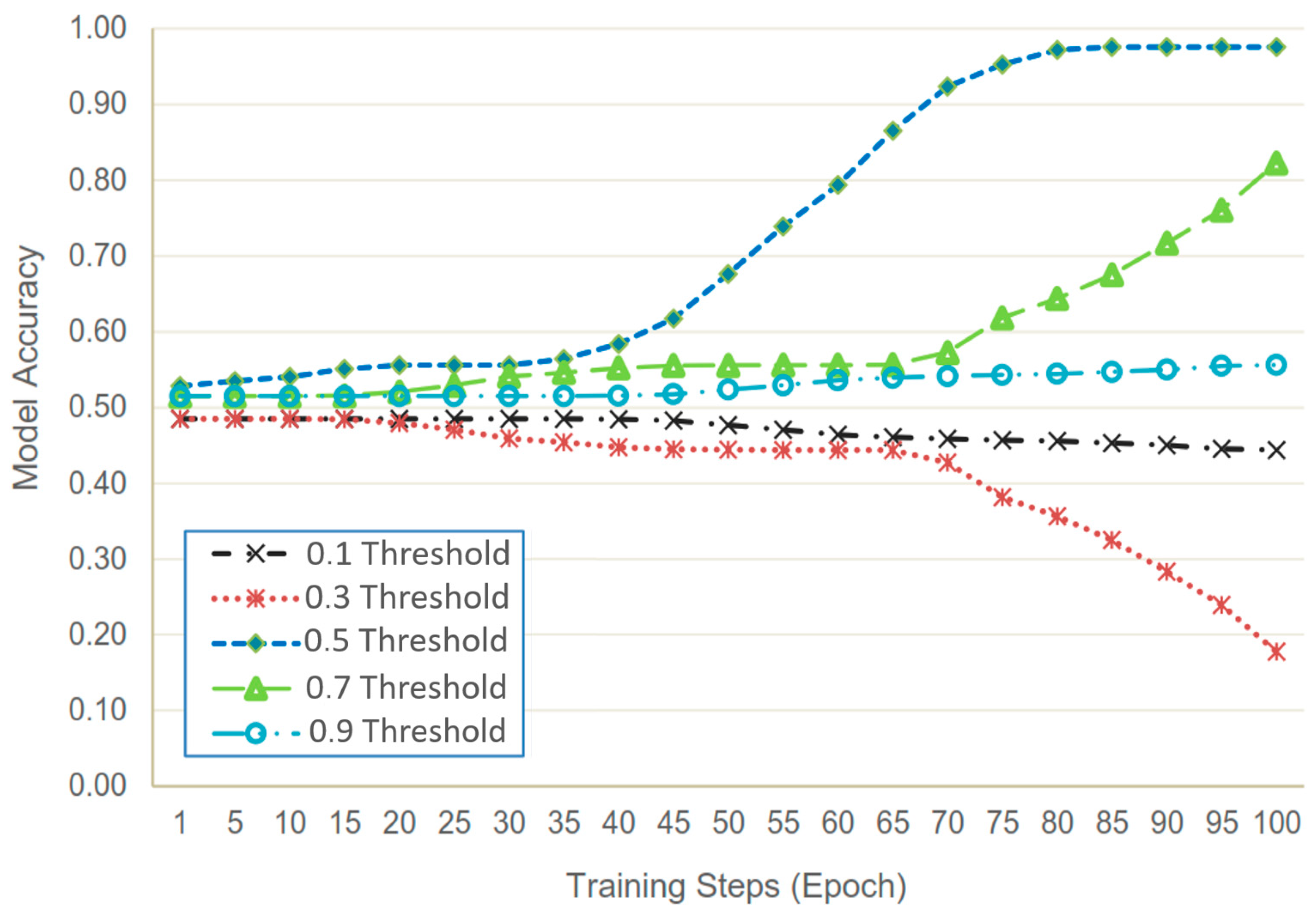
3.5. Model Training
| Algorithm 2. Model Training | |
| Input: Packet pairs training set, epoch Output: Trained model, loss, and accuracy history | |
| 1: 2: 3: 4: 5: 6: 7: 8: 9: 10: 11: 12: 13: 14: 15: 16: 17: 18: 19: 20: 21: 22: 23: 24: | Packet1, Packet2 ← packet pairs from dataset y ← label of packet pairs lstm ← initiate LSTM(input_size, hidden_dim) threshold ← [0.1, 0.3, 0.5, 0.7, 0.9] For each Epoch Packet1, Packet2 ← embed(Packet1, Packet2) LSTMa, (ha, ct) = self.lstm(Packet1) LSTMb, (hb, ct) = self.lstm(Packet2) y_hat ← exp(-abs(ha[-1] − hb[-1])) For each threshold optimizer.zero_grad() loss ← binary_cross_entropy(y_hat, y) loss.backward() optimizer.step() sum_loss ← sum_loss + (loss × total_y) total ← total_y is_simmilar ← y_hat > threshold If is_simmilar = true correct ← correct + 1 EndIf train_loss ← sum_loss/total train_acc ← correct/total EndIf EndFor |
4. Results and Analysis
4.1. Simulation Setup
4.2. IPPM Evaluation
4.3. Network Delay
4.4. Packet Delivery Ratio
4.5. Throughput
4.6. Algorithm Complexity Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| IPPM | Intelligent packet priority module |
| UAV | Unmanned aerial vehicle |
| MaLSTM | Manhattan long short-term memory |
| GCS | Ground control system |
| TBS | Terrestrial base station |
| NS-3 | Network Simulator–3 |
| PBM | Python binding module |
References
- Bezmenov, V.; Safin, K.; Stepanov, S. Application of unmanned aerial vehicles for solving engineering tasks. IOP Conf. Ser. Mater. Sci. Eng. 2020, 890, 12135. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the Sky: Leveraging UAVs for Disaster Management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Sona, G.; Passoni, D.; Pinto, L.; Pagliari, D.; Masseroni, D.; Ortuani, B.; Facchi, A. UAV multispectral survey to map soil and crop for precision farming applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2016, XLI-B1, 1023–1029. [Google Scholar] [CrossRef]
- Shaikh, Z.; Baidya, S.; Levorato, M. Robust Multi-Path Communications for UAVs in the Urban IoT. In Proceedings of the 2018 IEEE International Conference on Sensing, Communication and Networking, SECON Workshops 2018, Hong Kong, China, 11–13 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Callegaro, D.; Baidya, S.; Ramachandran, G.S.; Krishnamachari, B.; Levorato, M. Information Autonomy: Self-Adaptive Information Management for Edge-Assisted Autonomous UAV Systems. In Proceedings of the IEEE Military Communications Conference MILCOM, Norfolk, VA, USA, 12–14 November 2019; pp. 40–45. [Google Scholar] [CrossRef]
- Callegaro, D.; Baidya, S.; Levorato, M. Dynamic Distributed Computing for Infrastructure-Assisted Autonomous UAVs. In Proceedings of the IEEE International Conference on Communications, Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Henderson, T.R.; Lacage, M.; Riley, G.F.; Dowell, C.; Kopena, J. Network simulations with the ns-3 simulator. SIGCOMM Demonstr. 2008, 14, 527. [Google Scholar]
- Ardupilot. Autopilot Suite Documentation. 2023. Available online: http://ardupilot.com/ (accessed on 10 May 2023).
- Baidya, S.; Shaikh, Z.; Levorato, M. FlynetSim: An open source synchronized UAV network simulator based on ns-3 and ardupilot. In Proceedings of the MSWiM 2018—Proceedings of the 21st ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Montreal, QC, Canada, 28 October–2 November 2018; pp. 37–45. [Google Scholar] [CrossRef]
- Windiatmaja, J.H.; Tjahaja, J.C.; Al Amin, K.; Sari, R.F. Implementation of Socket Priority Module for Unmanned Aerial Vehicle Network using FlyNetSimulator. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1077, 012021. [Google Scholar] [CrossRef]
- H-SIM. H-SIM Flight Simulator. 2023. Available online: http://www.h-sim.com (accessed on 11 May 2023).
- Erle Robotics. Erle-Brain|Erle Robotics. 2015. Available online: http://erlerobotics.com/blog/erle-brain/ (accessed on 12 May 2023).
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robots 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Navio. NAVIO2 Autopilot. 2023. Available online: https://emlid.com/navio/ (accessed on 11 May 2023).
- Ardupilot. Ardupilot SITL. 2023. Available online: http://ardupilot.org/dev/docs/sitl-simulator-software-in-the-loop.html (accessed on 13 May 2023).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. ICRA Workshop Open Source Softw. 2009, 3, 5. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutorials 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Luong, N.C.; Hoang, D.T.; Gong, S.; Niyato, D.; Wang, P.; Liang, Y.-C.; Kim, D.I. Applications of deep reinforcement learning in communications and networking: A survey. IEEE Commun. Surv. Tutorials 2019, 21, 3133–3174. [Google Scholar] [CrossRef]
- Zhu, H.; Cao, Y.; Wang, W.; Jiang, T.; Jin, S. Deep reinforcement learning for mobile edge caching: Review, new features, and open issues. IEEE Netw. 2018, 32, 50–57. [Google Scholar] [CrossRef]
- Tang, F.; Kawamoto, Y.; Kato, N.; Liu, J. Future intelligent and secure vehicular network toward 6G: Machine-learning approaches. Proc. IEEE 2019, 108, 292–307. [Google Scholar]
- She, C.; Sun, C.; Gu, Z.; Li, Y.; Yang, C.; Poor, H.V.; Vucetic, B. A tutorial on ultrareliable and low-latency communications in 6G: Integrating domain knowledge into deep learning. Proc. IEEE 2021, 109, 204–246. [Google Scholar]
- Lei, L.; Tan, Y.; Zheng, K.; Liu, S.; Zhang, K.; Shen, X. Deep reinforcement learning for autonomous internet of things: Model, applications and challenges. IEEE Commun. Surv. Tutorials 2020, 22, 1722–1760. [Google Scholar]
- Jeganathan, A.; Dhayabaran, B.; Jayakody, D.N.K.; Ranchagodage Don, S.A. An Intelligent Age of Information Based Self-Energized Uav-Assisted Wireless Communication System. IET Commun. 2023, 17, 2141–2151. [Google Scholar]
- Umair, M.B.; Iqbal, Z.; Bilal, M.; Almohamad, T.A.; Nebhen, J.; Mehmood, R.M. An efficient internet traffic classification system using deep learning for IoT. arXiv 2021, arXiv:2107.12193. [Google Scholar]
- Khawaja, W.; Yaqoob, Q.; Guvenc, I. RL-Based Detection, Tracking, and Classification of Malicious UAV Swarm through Airborne Cognitive Multibeam Multifunction Phased Array Radar. Drones 2023, 7, 470. [Google Scholar] [CrossRef]
- Khan, M.A.; Khan, I.U.; Safi, A.; Quershi, I.M. Dynamic routing in flying ad-hoc networks using topology-based routing protocols. Drones 2018, 2, 27. [Google Scholar] [CrossRef]
- Hamilton Ortiz, J.; Tavera Romero, C.A.; Taha Ahmed, B.; Khalaf, O.I. QoS in FANET Business and Swarm Data. Comput. Mater. Contin. 2022, 72, 1877–1899. [Google Scholar]
- Zhang, W.-N.; Ming, Z.-Y.; Zhang, Y.; Liu, T.; Chua, T.-S. Capturing the semantics of key phrases using multiple languages for question retrieval. IEEE Trans. Knowl. Data Eng. 2015, 28, 888–900. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar]
- Hochreiter, S. The vanishing gradient problem during learning recurrent neural nets and problem solutions. Int. J. Uncertain. Fuzziness Knowl.-Based Syst. 1998, 6, 107–116. [Google Scholar] [CrossRef]
- Mueller, J.; Thyagarajan, A. Siamese recurrent architectures for learning sentence similarity. In Proceedings of the AAAI Conference on Artificial Intelligence, Phoenix, VZ, USA, 12–17 February 2016; Volume 30. [Google Scholar]
- Zeiler, M.D. Adadelta: An adaptive learning rate method. arXiv 2012, arXiv:1212.5701. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Packet 1 | @@@U_000***1***1671196580***472***0x5643cb247a40*** TELEMETRY:***last_heartbeat***0.149132145#7557#7570 |
| Packet 2 | @@@G_000***17***1671196612***80***0x5643cb247de0*** COMMAND: ***HEARTBEAT_MESSAGE |
| Label | 1 (Similar) |
| Parameters | Values |
|---|---|
| Network simulator | FlyNetSim (NS-3 and ArduPilot) |
| Network area (radius) | 50 m |
| UAV transmission range (based on common LTE BTS) | 100 m |
| UAV altitude | 40 m |
| Number of UAV nodes | 10 nodes |
| Number of interfering nodes (based on maximum devices allowed on common LTE BTS) | 100 |
| Number of channels | Single channel |
| Interfering nodes data rate | 1 Mbps |
| UAV type | Swarm UAVs |
| Radio propagation channel model | Free space path loss (FSPL) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prakoso, D.B.; Windiatmaja, J.H.; Mulyanto, A.; Sari, R.F.; Nordin, R. Intelligent Packet Priority Module for a Network of Unmanned Aerial Vehicles Using Manhattan Long Short-Term Memory. Drones 2024, 8, 183. https://doi.org/10.3390/drones8050183
Prakoso DB, Windiatmaja JH, Mulyanto A, Sari RF, Nordin R. Intelligent Packet Priority Module for a Network of Unmanned Aerial Vehicles Using Manhattan Long Short-Term Memory. Drones. 2024; 8(5):183. https://doi.org/10.3390/drones8050183
Chicago/Turabian StylePrakoso, Dino Budi, Jauzak Hussaini Windiatmaja, Agus Mulyanto, Riri Fitri Sari, and Rosdiadee Nordin. 2024. "Intelligent Packet Priority Module for a Network of Unmanned Aerial Vehicles Using Manhattan Long Short-Term Memory" Drones 8, no. 5: 183. https://doi.org/10.3390/drones8050183
APA StylePrakoso, D. B., Windiatmaja, J. H., Mulyanto, A., Sari, R. F., & Nordin, R. (2024). Intelligent Packet Priority Module for a Network of Unmanned Aerial Vehicles Using Manhattan Long Short-Term Memory. Drones, 8(5), 183. https://doi.org/10.3390/drones8050183