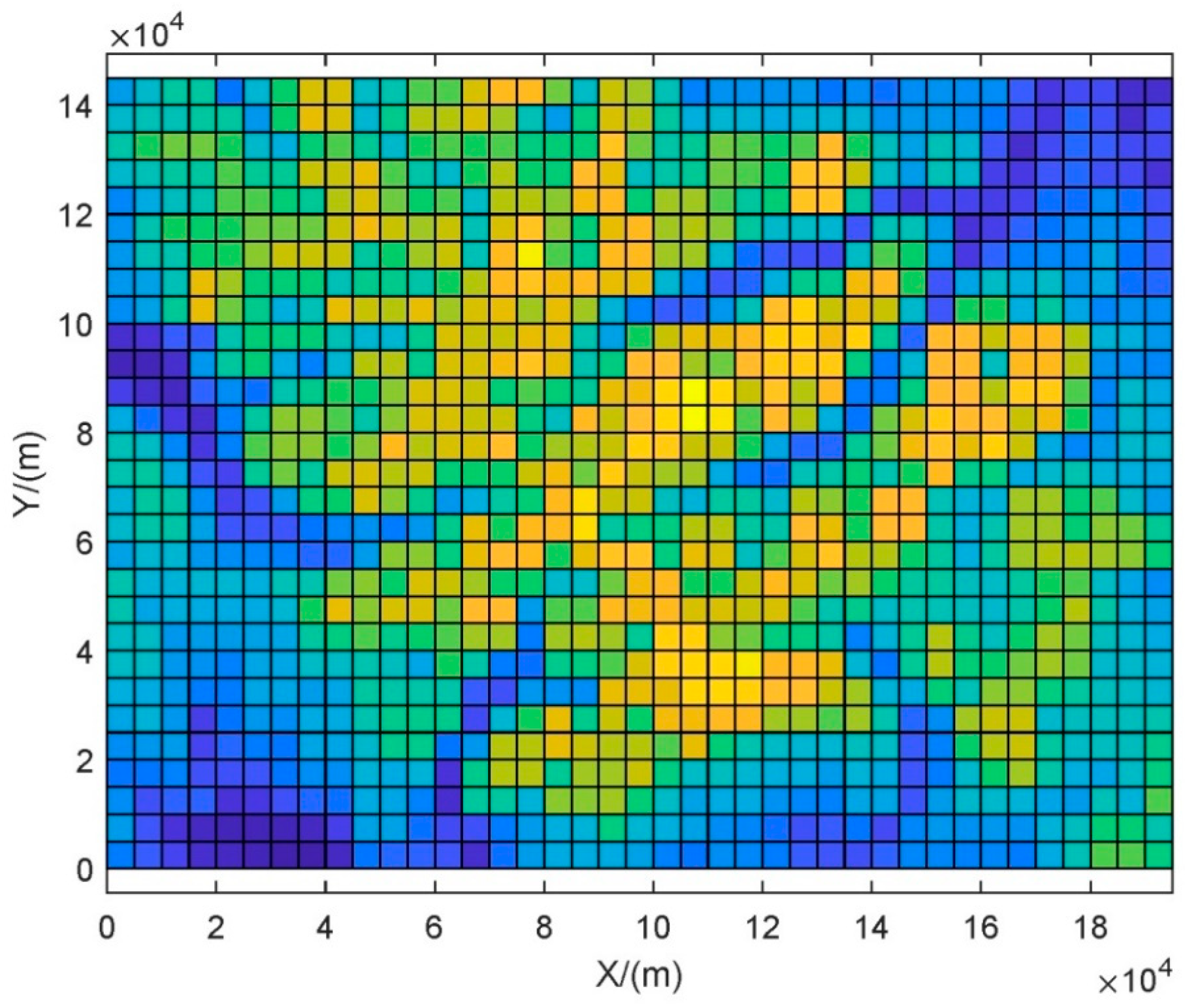
The target probability distribution map is the prerequisite for search trajectory planning, providing prior information support for search task area planning and trajectory planning. Based on obtaining the target probability distribution map, the search task planning of the unmanned aerial vehicle mainly consists of two parts: search area division and search trajectory planning.
2.1. Search Area Allocation Method Based on the Average Probability of Containment
Due to objective factors such as drone search resources, search hardware capabilities, and time windows, there are often not enough search resources to fully cover all areas where the target may exist. The key issues at this point are what kind of drone to use, where to search, and what search method to use to maximize the search success rate. Search area allocation should consider the performance of the drone and the task requirements, and prioritize searching areas with a high probability of target presence in the target probability distribution map as much as possible.
This section mainly introduces polygon areas and search base circle areas, and gives the corresponding optimal allocation criteria for search areas.
The search reference is the reference basis for determining the search area, which is calculated based on the target’s approximate location, motion characteristics, and environmental information. It mainly consists of the following three types: reference point, reference line, and reference plane. The reference point is the case where the target’s approximate location is known. The probability distribution is calculated based on the target’s motion characteristics, and the point with the highest probability of target existence is determined as the reference point. The reference line is the case where there are two or more possible locations for the target’s approximate location. The reference line is determined based on the connection between multiple approximate locations. In cases where one or more target approximate location points cannot be determined, the reference plane is usually used, which refers to a certain area where the target existence probability is higher than a threshold value.
In order to determine more universal and accurate search area types, the types of reference points, reference lines, and reference planes were summarized, generalized, and improved, and two types of area types, polygon areas and search base circle areas, were proposed. These two types of area types can cover the three reference areas mentioned above, and facilitate a more accurate determination of the search area.
The information of the polygon region is represented by the coordinates of the region’s vertices. Assuming that there are
n vertices in the selected search polygon region, their coordinates are
p1,
p2, …,
pn. Assuming that m polygon regions are planned in the search region, the
ith polygon is denoted by the following symbol:
The search base circle domain is a combination of the reference point and the reference plane. It is a circular area determined by taking the point with the highest probability of target existence as the center
c and determining the search radius
r based on the coverage of the reference plane. Assuming that
k search base circle domains are planned in the search area, the
ith circle domain is denoted by the following symbol:
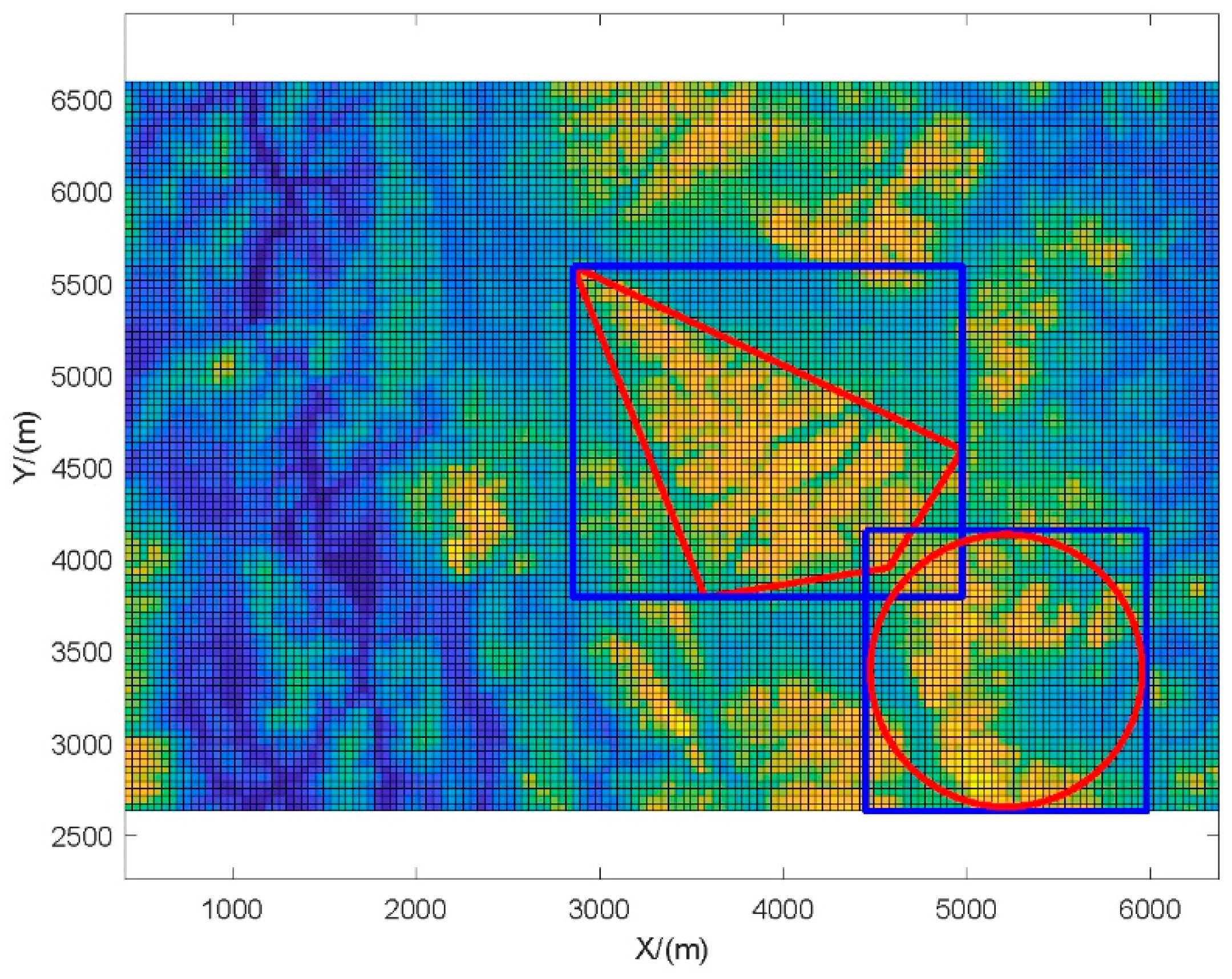
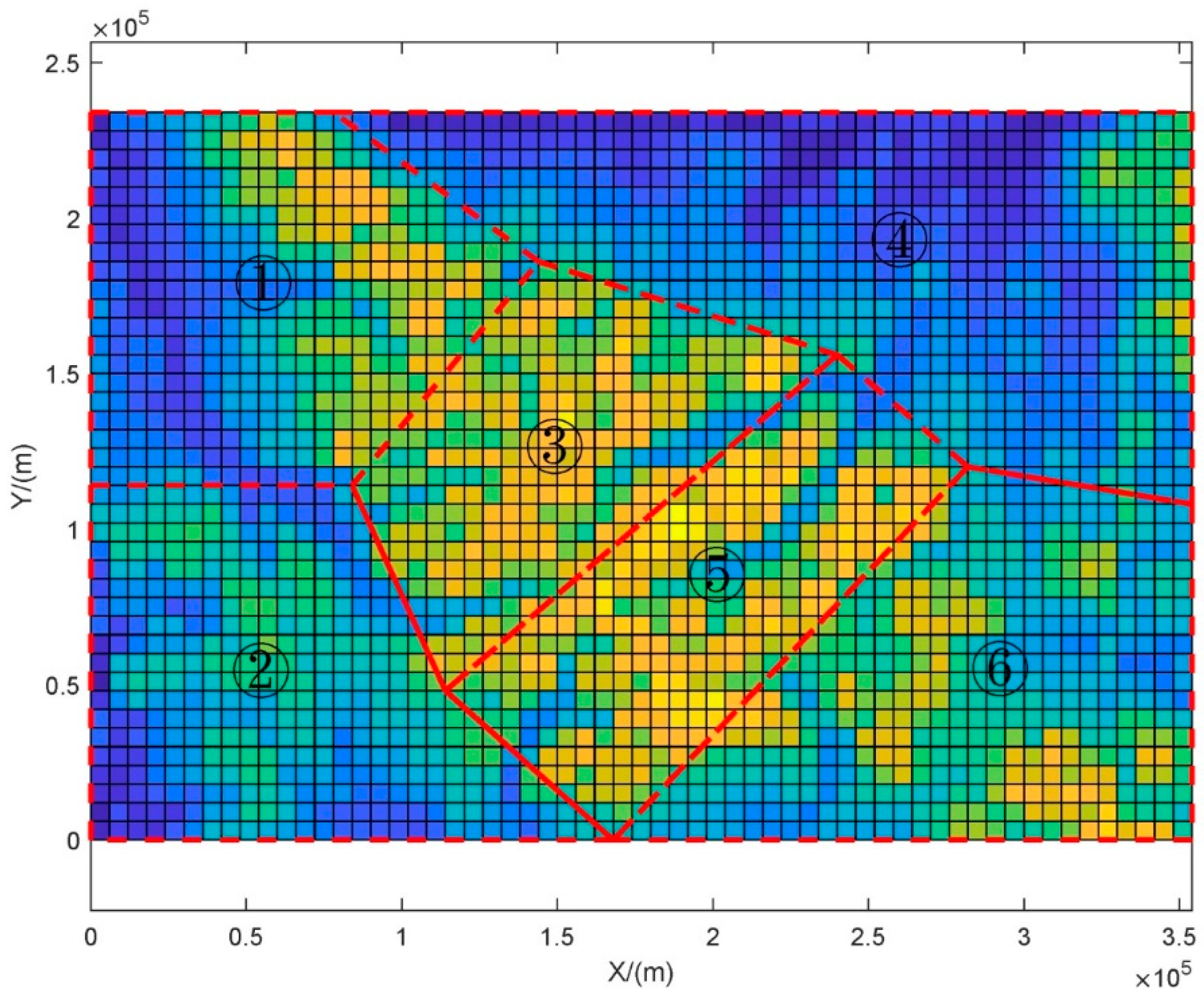
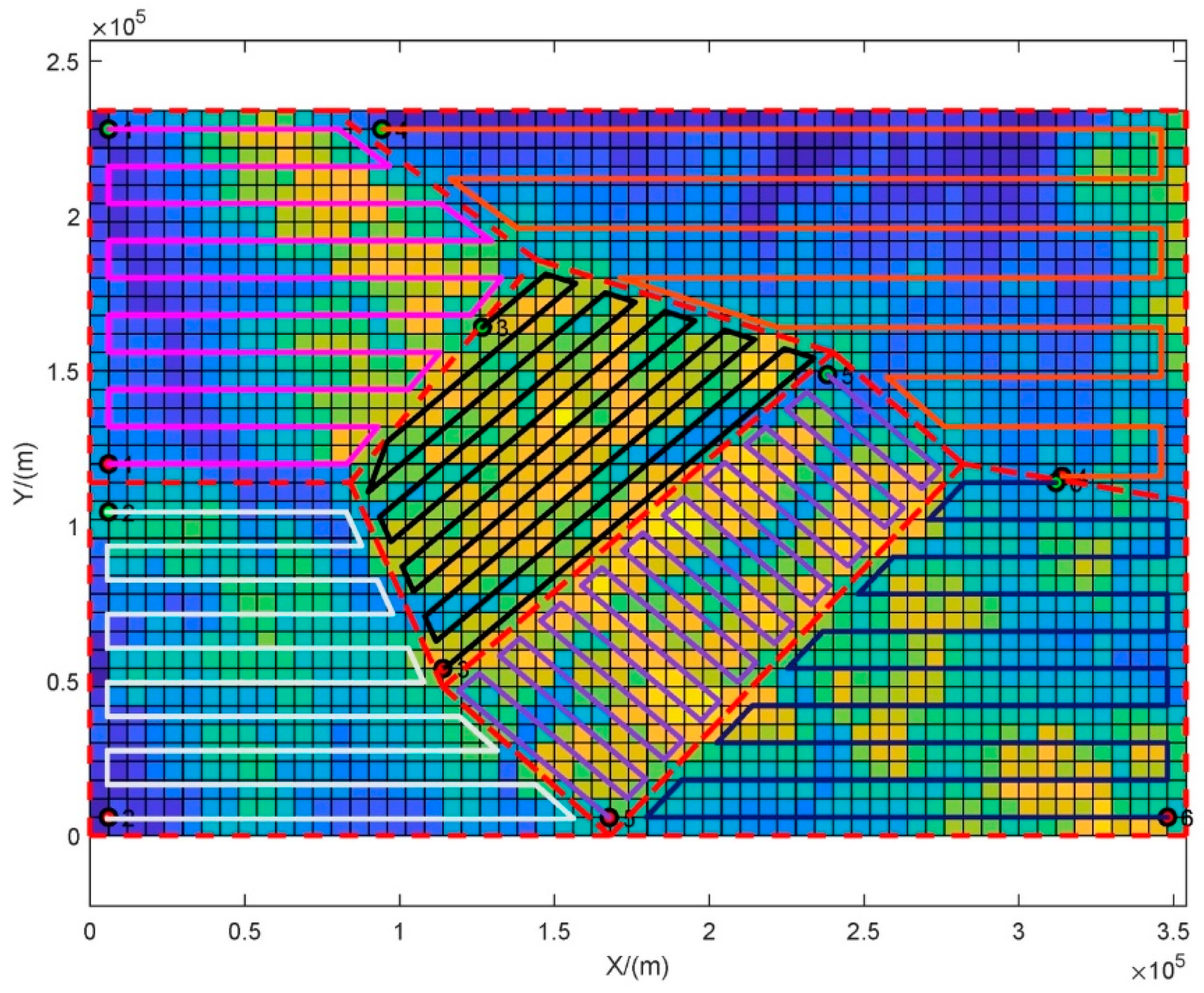
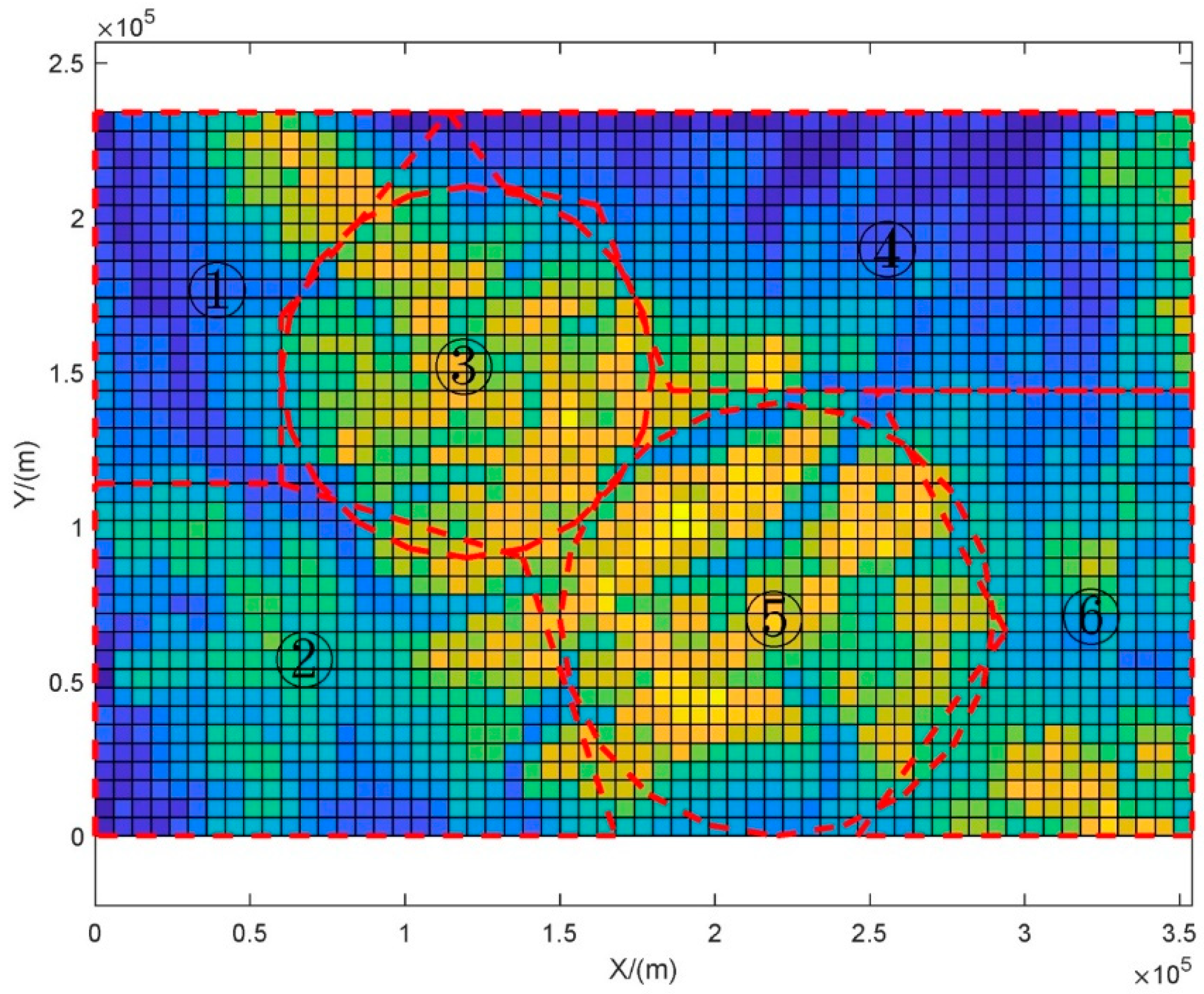
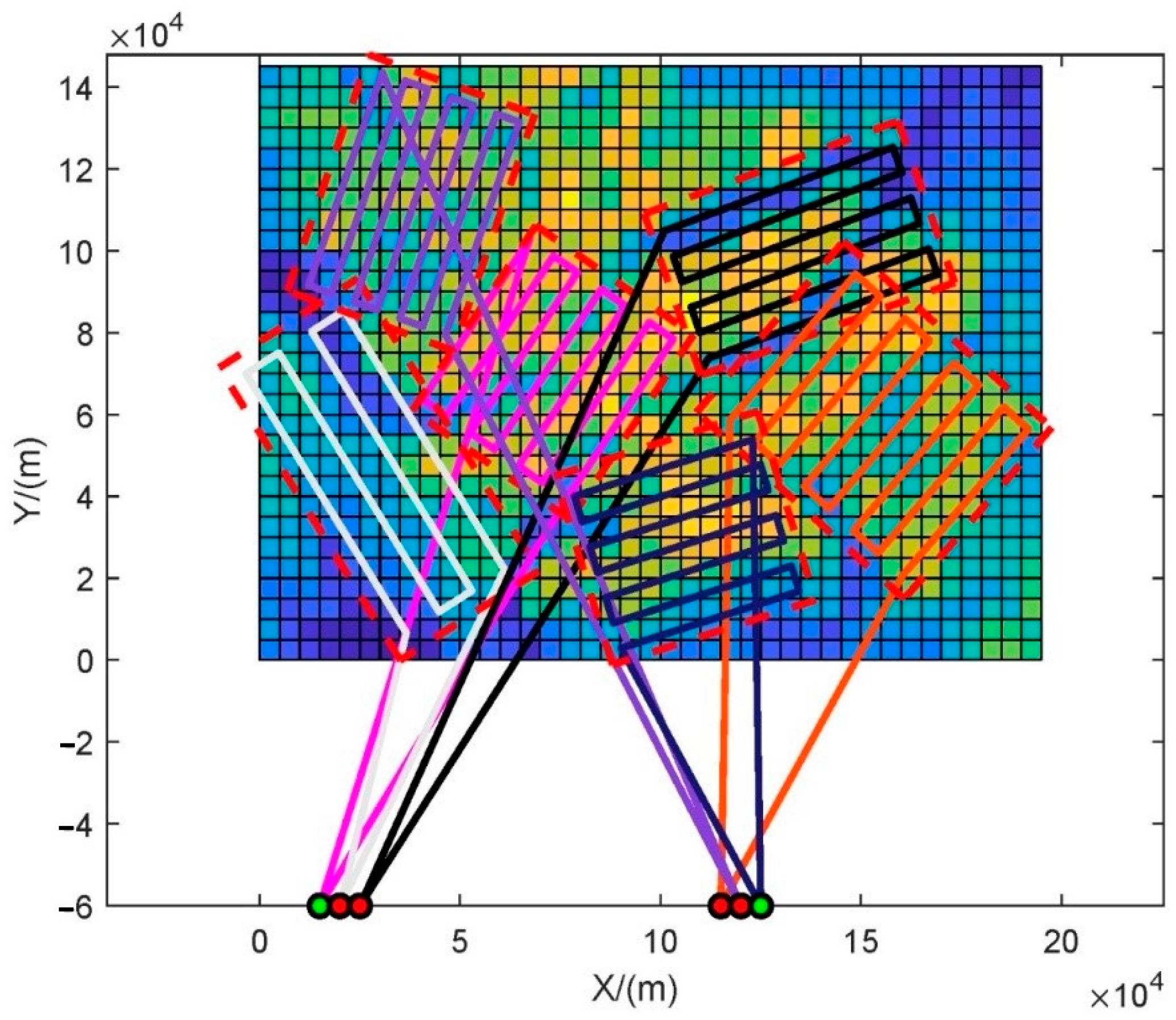
To verify the advantages of polygonal areas and search base circle areas over classic area types, a simple example is given through simulation. The first method uses search rectangles for area planning, while the second method uses polygonal areas and search base circle areas. The planning results are shown in
Figure 1.
As can be seen in
Figure 1, the red area represents the polygon area and search base circle area, which can more accurately select the area with a high probability of target existence, facilitating the avoidance of overlap between multiple areas. In contrast, the search rectangle represented by the blue area inevitably includes areas with a low probability of target existence in the search range, which results in the additional consumption of search resources and reduces search efficiency.
Figure 1 demonstrates the advantages of the two proposed types of search areas in accurately selecting the search area, laying the foundation for subsequent search area optimization and search trajectory planning.
Search area optimization refers to the process of minimizing the search resources and maximizing the target coverage probability within the planned search area under the constraints of drone capabilities and time windows.
The amount of search resources used can be represented by the area of the search region. The larger the search region, the longer the search time and the more search resources required.
The probability of coverage targets can be represented by the sum of the probabilities of inclusion within the search area. The definition of probability of containment (POC) is the probability that a search target is within a certain area, partition, or grid cell.
Combining the two indicators above, we set the optimization criterion for the search area as the average POC, which is the target POC per unit area, as follows:
where the numerator represents the sum of the probability of target inclusion in the search area, and the denominator represents the area of the search area.
If multiple search areas are planned at the same time, there may be overlap between the areas. Therefore, considering the overlap of areas and assuming that
n search areas are planned, the average POC of these
n search areas is:
As can be seen in the Formula (4), the area of the overlapping part of each search region is superimposed, but the target inclusion probability is taken only once. This optimization criterion provides a quantitative standard for planning search regions, enabling a rapid comparison of the advantages and disadvantages of multiple region planning results.
As can be seen in
Figure 1, the division and selection of polygon regions directly affect search performance. When selecting a polygon region, it is necessary to consider maximizing the probability of target existence within the region while minimizing the degree of overlap between regions. Obviously, this is a typical two-objective optimization problem.
To solve this problem, optimization can be used, but due to the uncertainty of the number of vertices in the polygon, it is difficult to calculate the area. Therefore, directly optimizing the number and location of vertices is challenging. To address this issue, this article proposes a method that utilizes rectangular cuts.
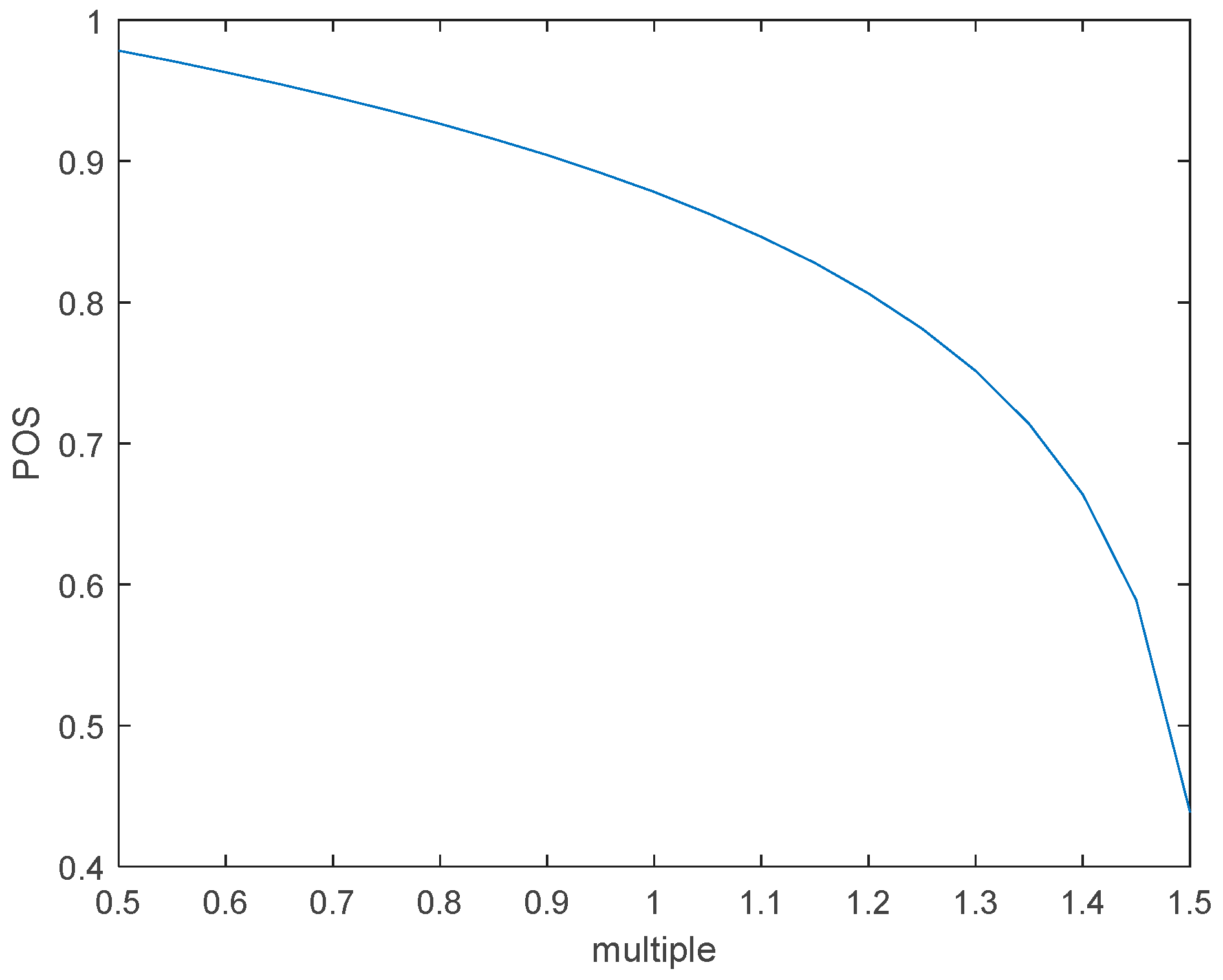
Firstly, based on the performance parameters, the maximum area Su that the drone can search in a rectangular area is calculated. Then, based on the number N of drones, the number N of rectangles to be deployed and the corresponding vertex count 4N are determined. Then, the rectangular area to be optimized is set to 1.3 times Su. Namely, N rectangles with an area of 1.3 Su are selected to satisfy the above two-objective function. Finally, using manual methods, the polygonal areas to be searched within each rectangle are planned. In this way, the corresponding area is also reduced to approximately Su. This approach simplifies the difficulty of the problem and improves the search efficiency.
2.2. Search Route Planning Model
Search trajectory planning mainly refers to planning the specific route of the drone’s actions in the search area after giving the search area. The search method is mainly related to the size and shape of the specific search area. There are six commonly used search methods, namely, sector search, extended square search, track line search, parallel line scan search, transverse line search, and transverse line coordinated search.
This section is based on commonly used search trajectory planning models and extends them to more general application scenarios, providing search trajectory planning models for polygonal areas and search base circle areas, respectively.
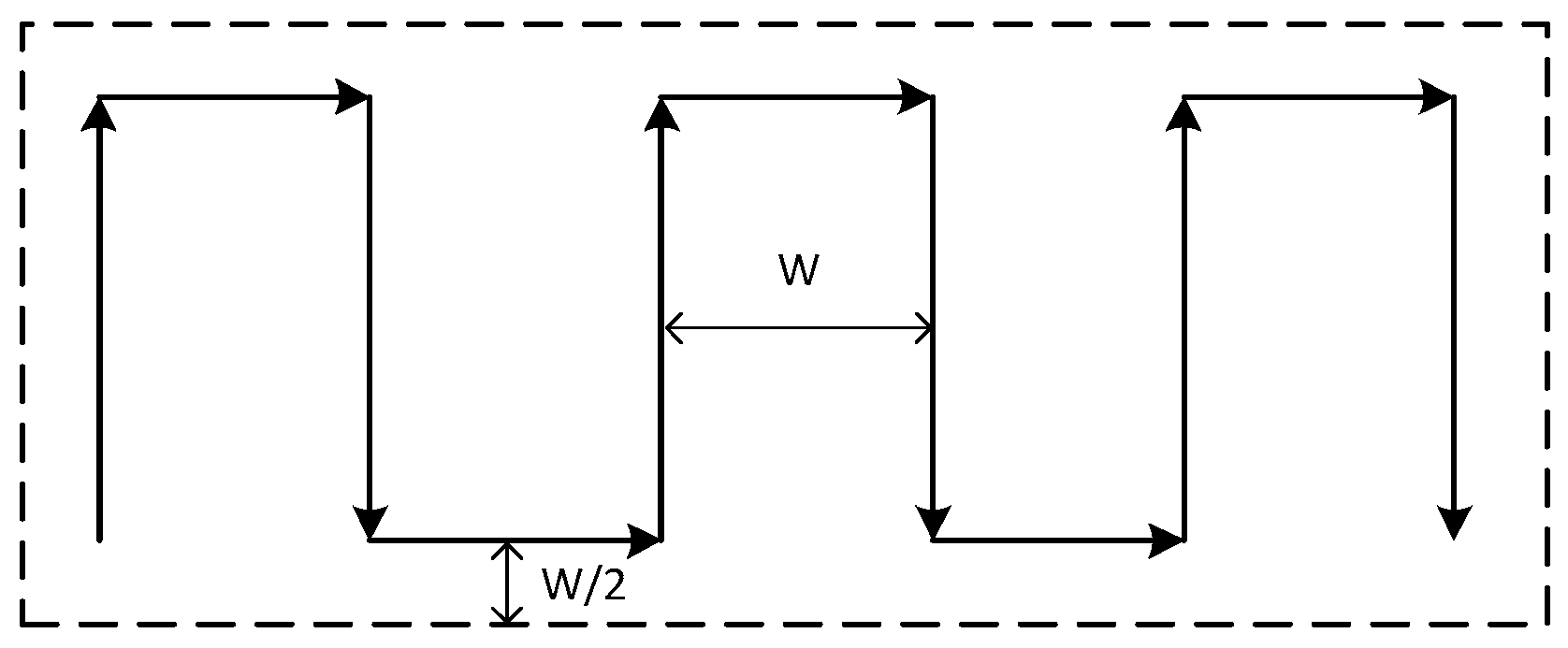
Commonly used rectangular area search methods include parallel line search and horizontal line search, as shown in
Figure 2 and
Figure 3.
The parallel line search method searches along the long side of the rectangle, while the horizontal line search method searches along the short side of the rectangle. These two strategies are relatively simple and will not be covered in detail in this article.
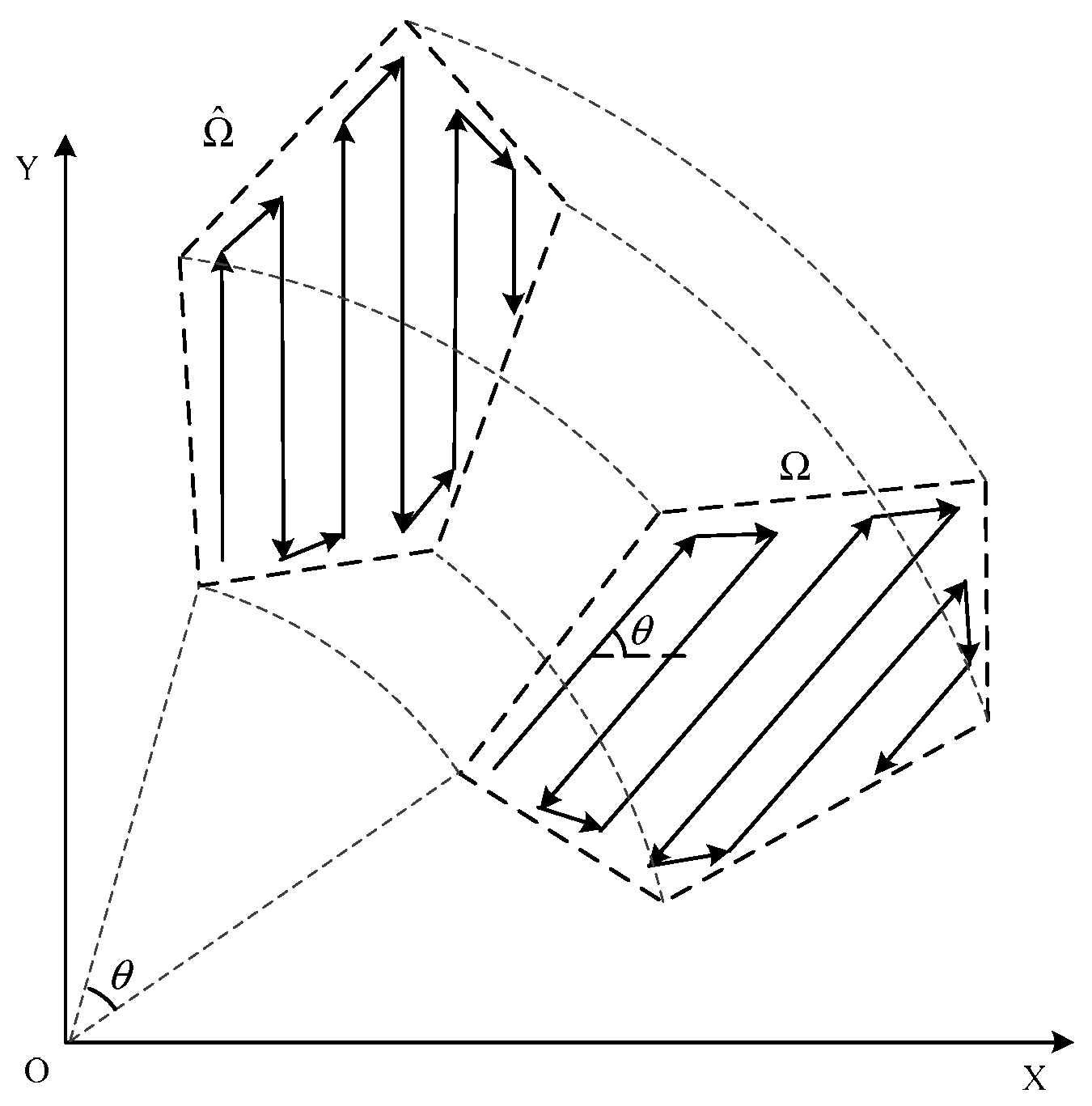
Obviously, parallel line scanning search and horizontal line search are two commonly used area search methods, but they can only be applied to rectangular areas, which is not universal enough. Therefore, this section combines the characteristics of several search methods and proposes a parallel search method with variable angles for polygonal areas, which can generate parallel search trajectories with arbitrary direction angles in any convex polygonal area. It not only covers commonly used area search methods but also provides a more flexible trajectory planning model that can generate optimal search schemes as much as possible. The algorithm principle is shown in
Figure 4.
Given a convex polygon region with n vertices, the parallel search direction angle is θ and the search line spacing is W. The planning process mainly consists of the following three steps:
Step 1—Rotate the vertices of the polygon region counterclockwise by
θ to obtain a new convex polygon
. The coordinate rotation is achieved using the following rotation matrix:
Step 2—Plan a parallel trajectory in the new convex polygon, with the trajectory direction parallel to the Y axis and the spacing between adjacent trajectories of W, resulting in the coordinates of the planned trajectory points being .
Step 3—Rotate the planned track point clockwise by
θ to obtain the parallel search track
in the original polygon area. The rotation matrix is as follows:
As can be seen from the above steps, the parallel search algorithm with variable angles mainly generates parallel tracks at arbitrary angles through coordinate rotation. This method is more convenient and more versatile. This method is also applicable to parallel line sweep search and lateral line search. Simply set the polygon area to a rectangular area, and then set the parallel search direction angle to be equal to the angle between the long side or short side.
The above process can be described as follows: when the area to be searched is an irregular polygon area, use Formula (5) to convert the area, and then obtain an area where one of the edges is parallel to the Y axis. In this way, the parallel line search method can be used to obtain the track within the transformed area. Afterwards, use Formula (6) to convert the obtained track, and then obtain the search track for the area to be searched.
The advantage of this approach is that only two transformations are required to generate a track line, ensuring that its X-axis coordinate remains relatively stable and facilitating track generation and data recording.
At the same time, minimizing the adjustment of the motion state of the drone can reduce battery consumption, allowing it to search more areas and improve search efficiency. This is also an advantage of parallel search in this article.
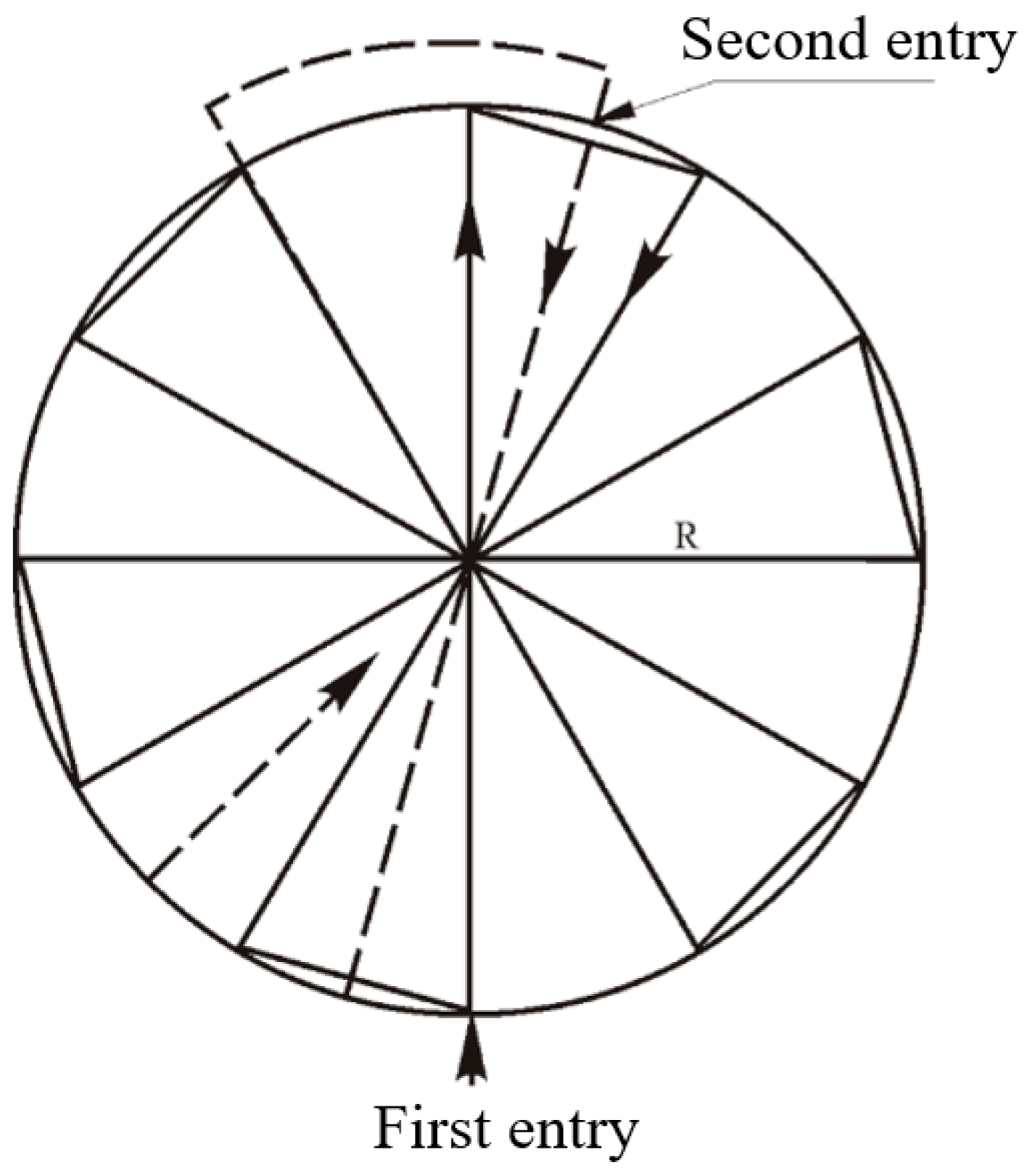
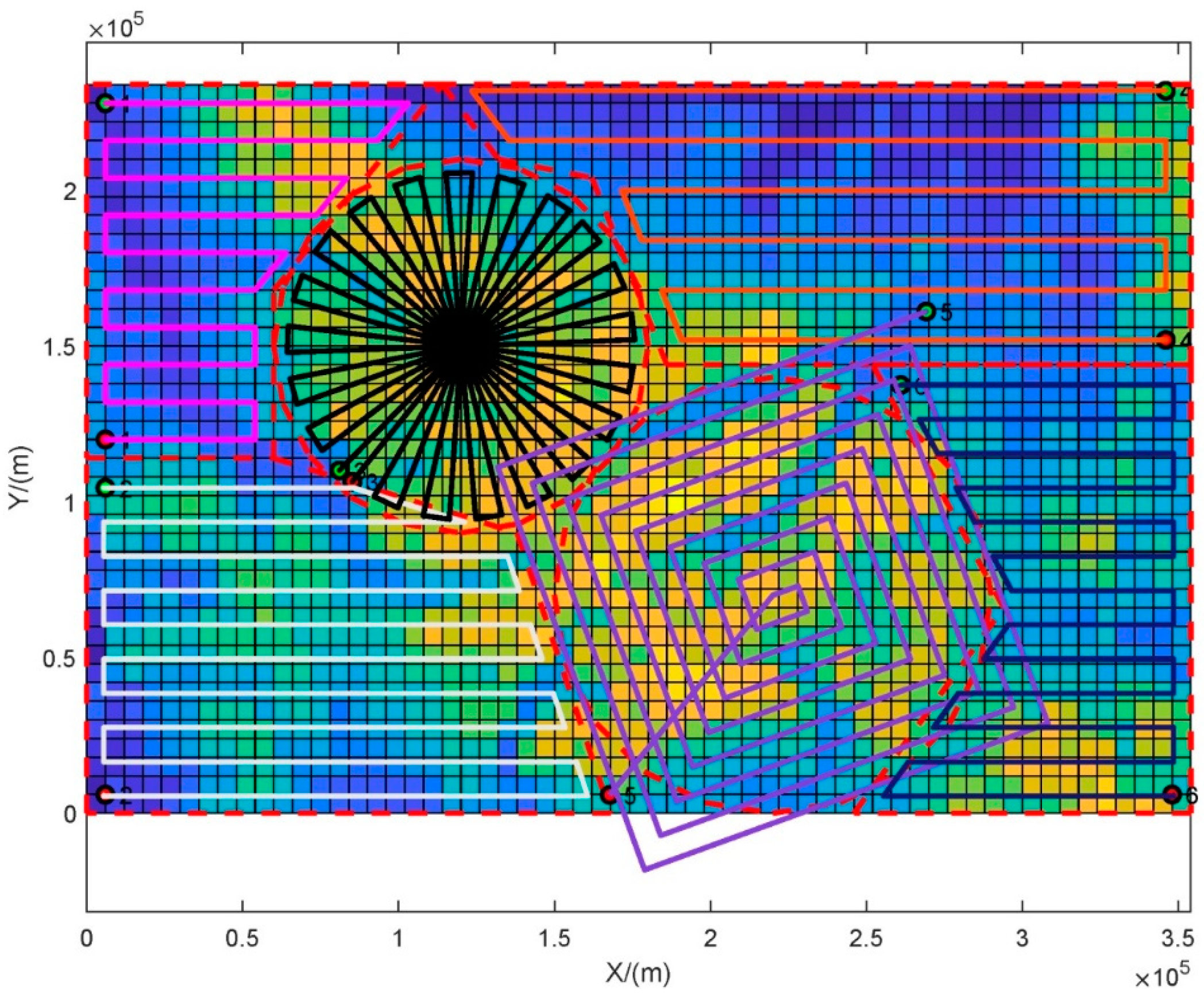
If the approximate location of the target is focused on a small area, the search base circle domain is usually used to determine the area to be searched. The center of the search base circle domain is the point with the highest probability of target existence, and the radius is determined according to need. Sector search, extended square search, and spiral search are all suitable for searching the search base circle domain, where sector search crosses the center multiple times, performing multiple repeated searches in the area with the highest probability of target existence, as shown in
Figure 5.
The extended square search method starts from the location with the highest probability of target presence and continuously expands outward through the extended square search method. During the secondary search, the search direction can be rotated by 45°, as shown in
Figure 6.
The reason for rotating 45° during the second search is to obtain more information. For example, using three orthogonal views to observe an object can provide more comprehensive information. Therefore, for the second search, rotating 45° yields the lowest similarity to the first search trajectory, resulting in the most information gain and improved search efficiency.
The spiral search method generally uses a 20° slope to spiral, and when the spiral approaches 360°, it switches to a 15° slope; then, it spirals in turn at 10° and 5° slopes, approaching 360°, as shown in
Figure 7.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}