
State-of-Charge Trajectory Planning for Low-Altitude Solar-Powered Convertible UAV by Driven Modes

Abstract
1. Introduction
2. System Description and System Model
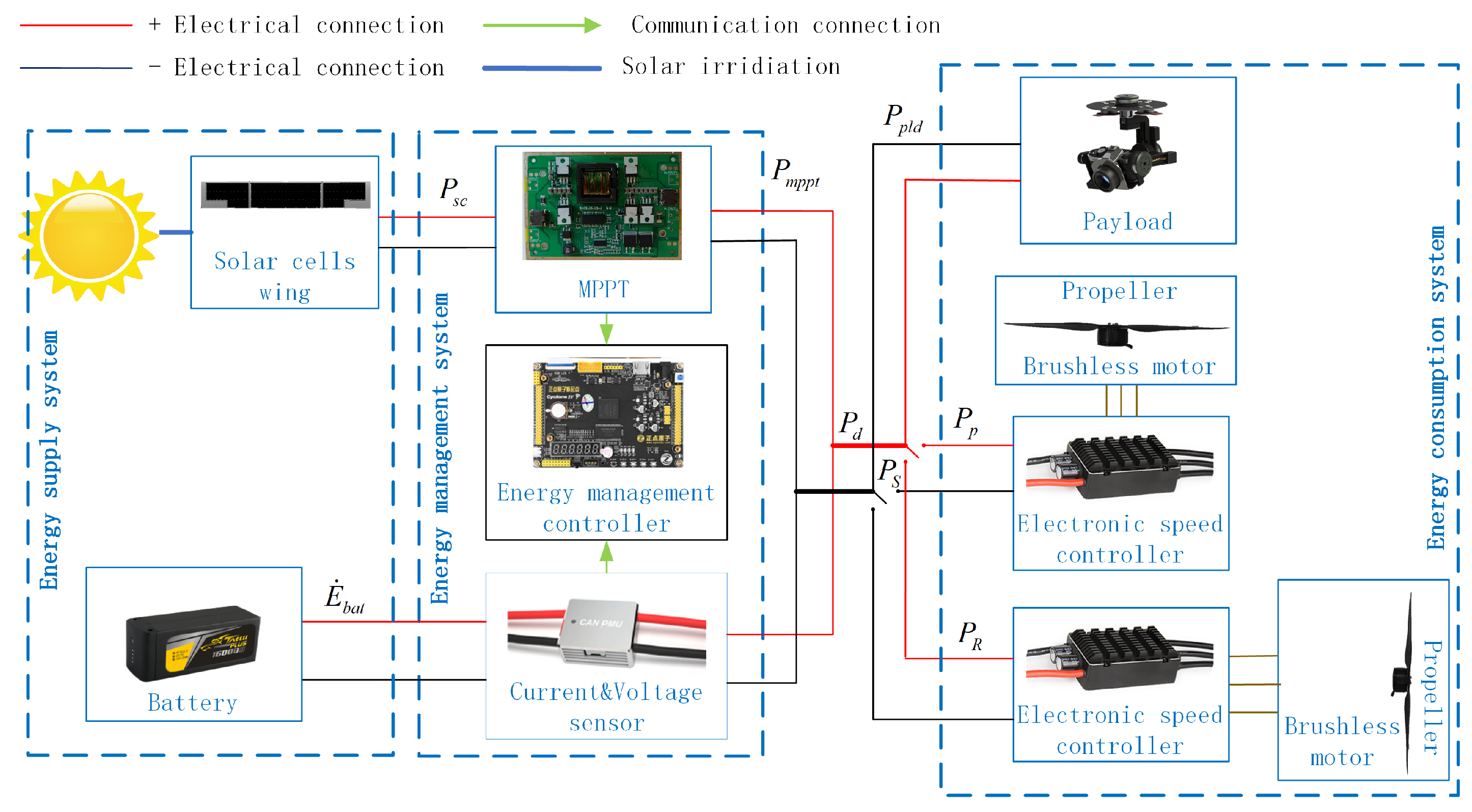
2.1. System Description
- (1)
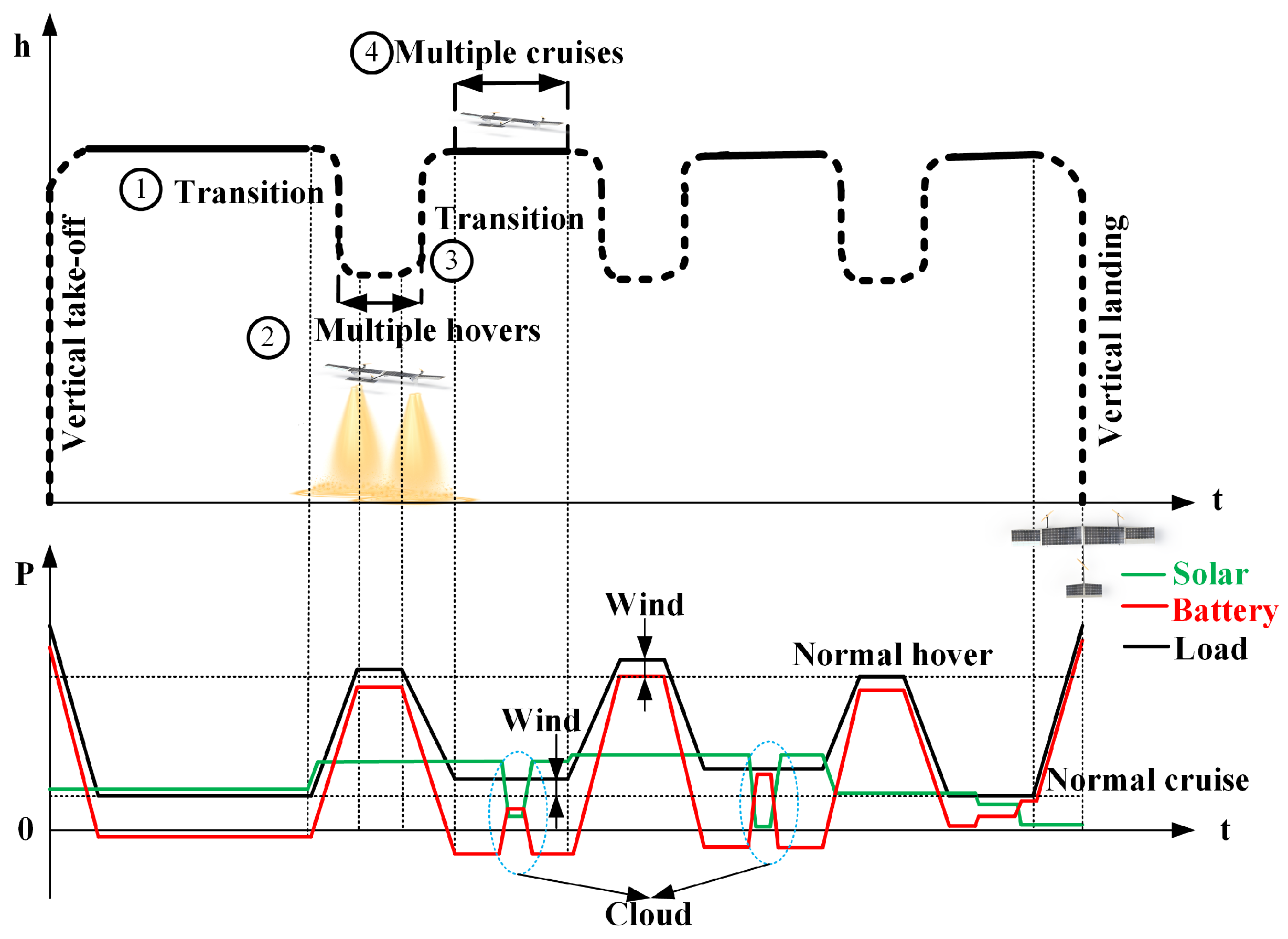
- Vertical Takeoff Phase: It is assumed that the SCUAVs take off vertically on the horizontal ground and climb to a safety altitude h at a fixed climbing velocity in the vertical direction. The whole vertical takeoff process is in the rotor mode, and the onboard power P of the system is larger because the axial thrust needs to be generated to overcome the gravity of the SCUAV.
- (2)
- Transition Phase: At this phase, it is assumed that the SCUAVs transform the axis direction of the power system by a mechanism to achieve the transition between the rotor mode and the fixed-wing mode. During the transition phase, the onboard power of the system is decreased in the process of the conversion from the rotor to the fixed-wing mode, while the required power of the system is increased during the cruise-to-hover transition.
- (3)
- Multiple Hovers Phase: The SCUAV assumes that the entire process is to convert its mechanism towards the vertical direction to provide the aircraft to the hovering mission. The multiple hovers process is in the rotor mode, and the required power of the system is smaller than that of the vertical takeoff stage.
- (4)
- Multiple Cruises Phase: The SCUAV assumes that the whole process is flying at a speed of maximum range/maximum endurance in the fixed-wing mode. During the multiple cruises phase, the required power of the SCUAV is lowest, the solar module absorbs solar irradiance and converts it into electricity, some of which is used for cruise missions, while the remaining energy is used to charge the battery.
- (a)
- Input energy decrease by solar irradiation. Due to solar radiation intensity changes caused by external (temperature, humidity, weather) and internal factors (days, time), the absorbed energy of the SCUAV decreases.
- (b)
- Output power increase by wind disturbance. The complex speed and direction of wind increase the thrust and drive power in multiple modes, resulting in an increase in the required power.
- (5)
- Vertical Landing Phase: During the vertical landing phase, the SCUAV is transformed to achieve thrust in the vertical direction until it lands on the ground. At this phase, the onboard power of the system is lower than that of the vertical takeoff phase.
2.2. Operation Condition Analysis
2.3. Multi-Mode Power Model
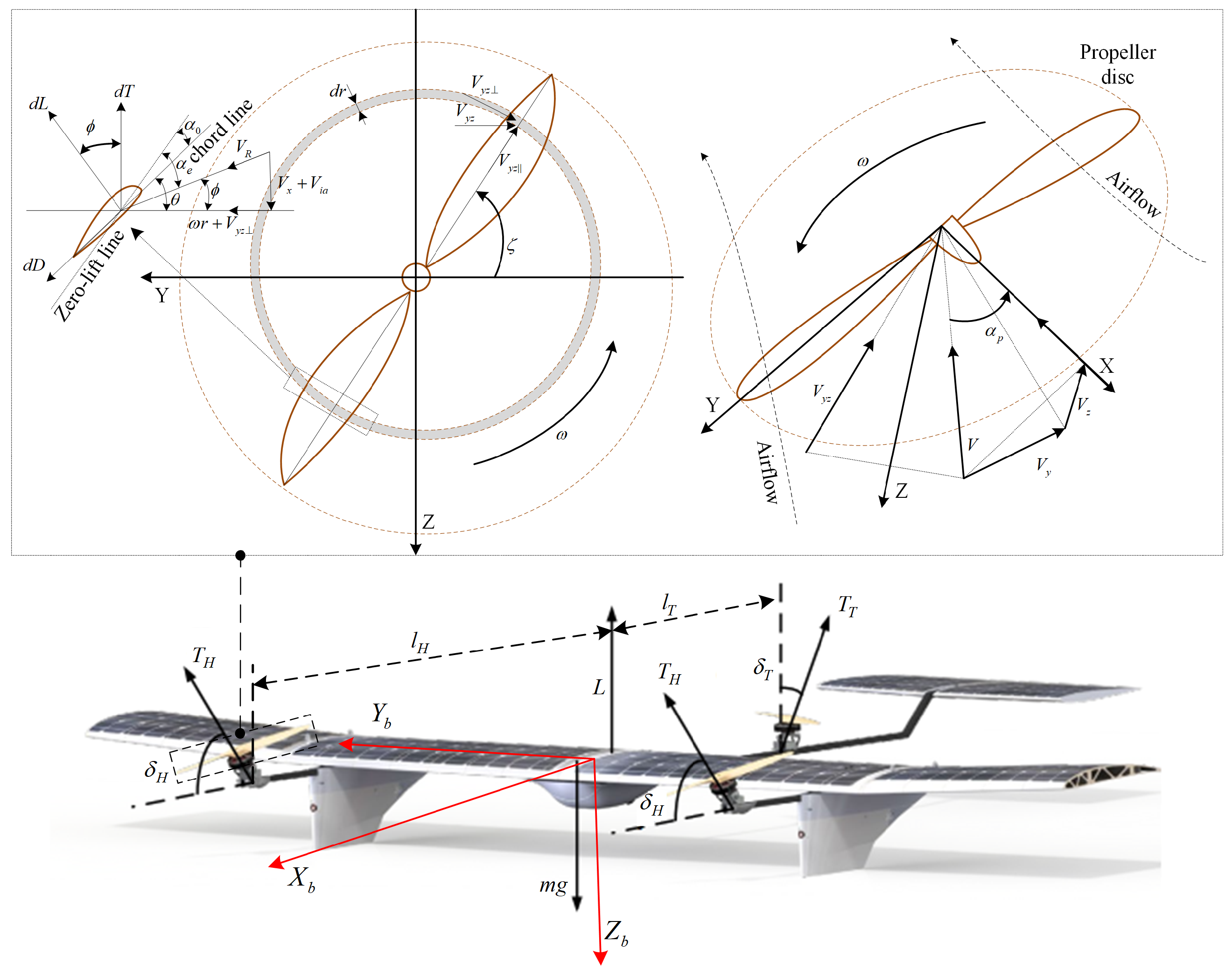
2.3.1. Propeller Aerodynamics
2.3.2. Flight Dynamics
2.3.3. Power Model
2.4. Solar Income Model
2.5. Energy Storage Model
3. Degressive SOC Trajectory Planning Method
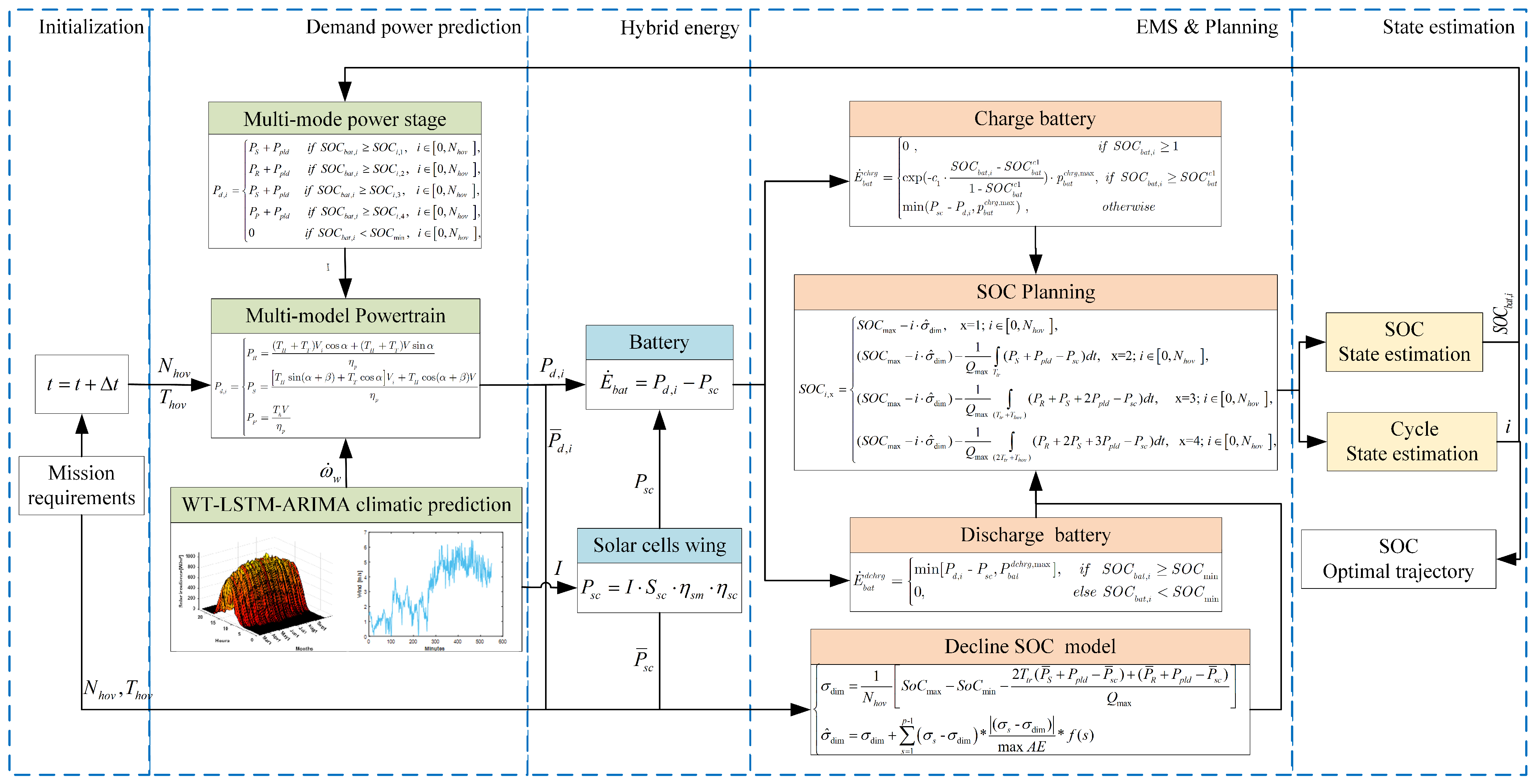
3.1. SOC Trajectory Planning Framework
3.2. Hybrid Energy Management Strategy for the Multi-Mode
- (1)
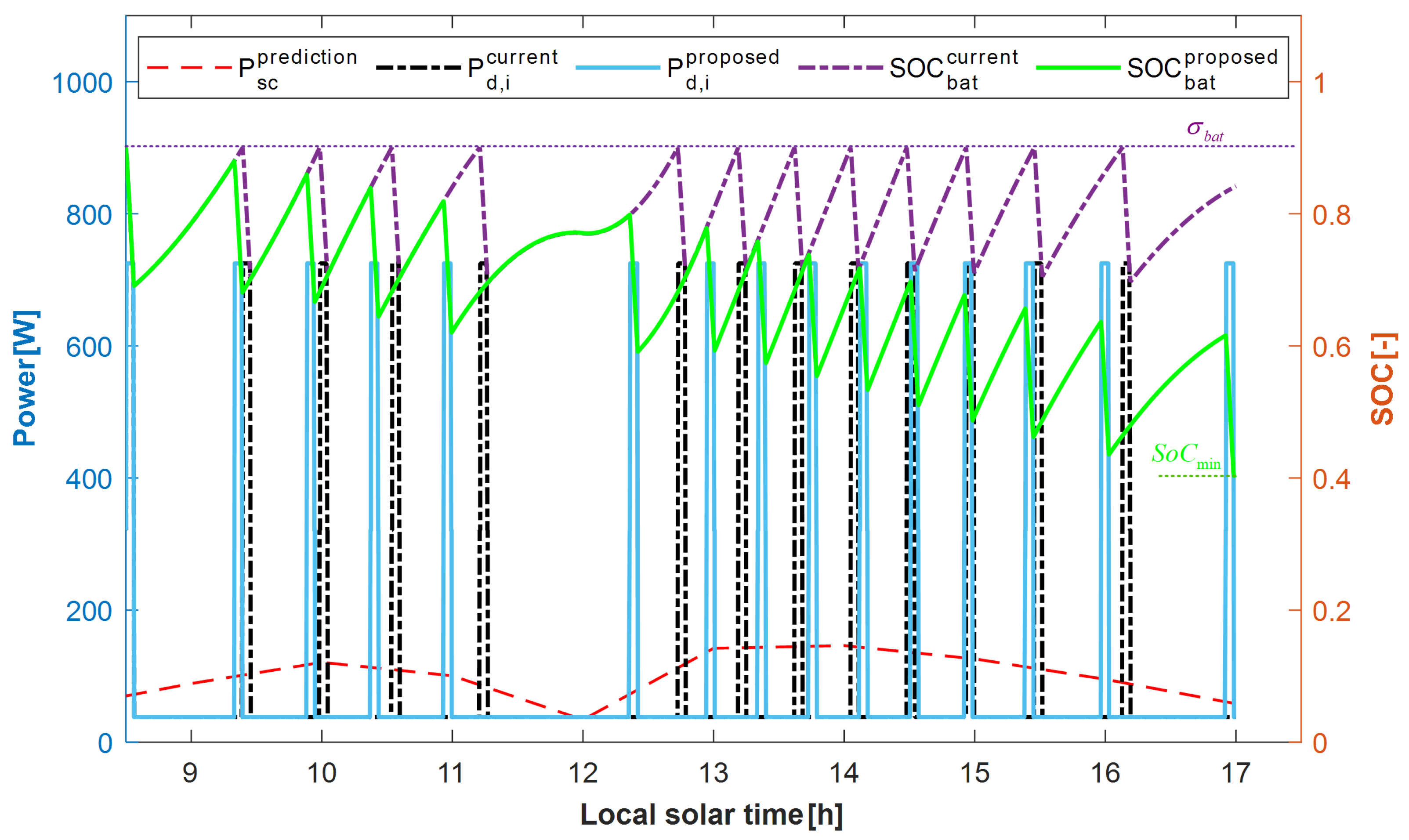
- The solar module has priority to discharge in hybrid energy and matched MPPT to realize the maximum power output of the solar cells wing, but the output power of the solar module needs to be limited when the battery SOC is charged to .
- (2)
- The battery assists the solar cells to meet the required power of the multi-mode, especially in the rotor mode, and stores the remaining energy of the solar cells. Moreover, compared with the battery used in traditional solar-powered UAVs, the batteries equipped in SCUAVs have a much shorter discharge time and higher continuous discharge power and peak discharge power. Therefore, the discharge depth of battery SOC is set to 0.4 and the charge process follows the charging characteristic curve. In addition, in order to avoid the overcharging and over-discharging of the battery, the maximum charging power and discharging power is limited to and , respectively.
3.2.1. Design and Analysis
3.2.2. Implementation Process
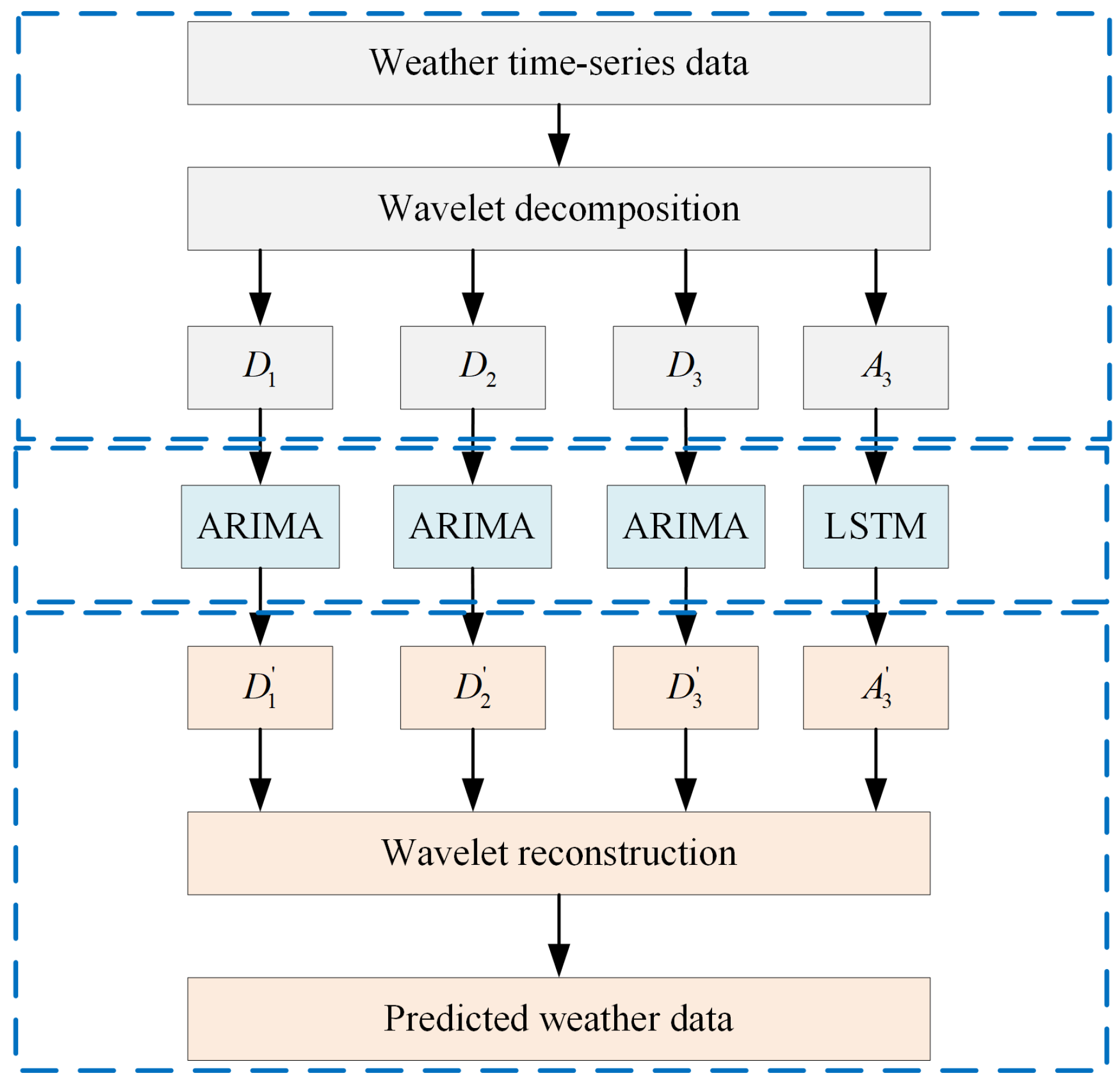
3.3. WT-LSTM-ARIMA-Based Weather Prediction Model
3.4. SOC Trajectory Planning Strategy
4. Results and Discussion
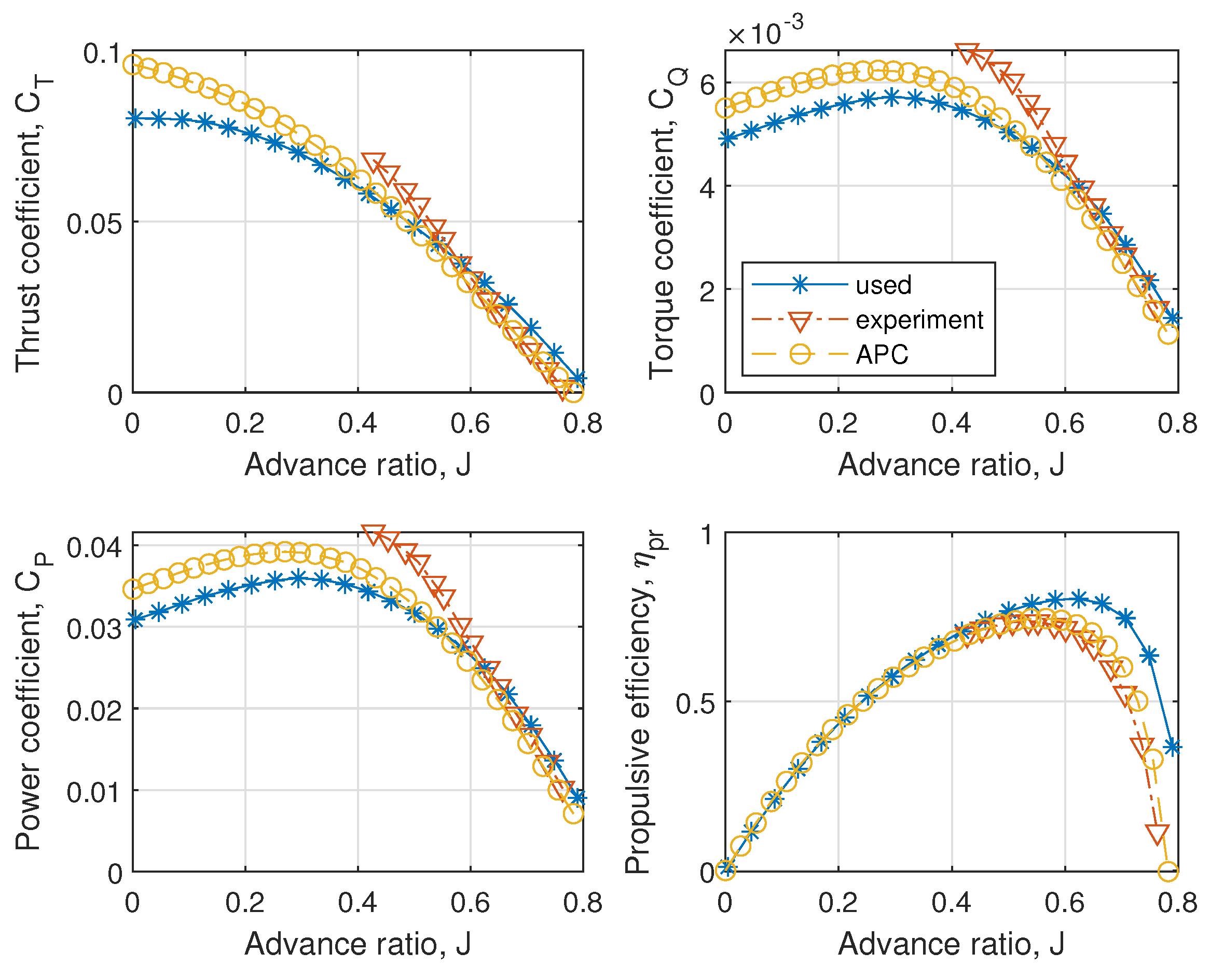
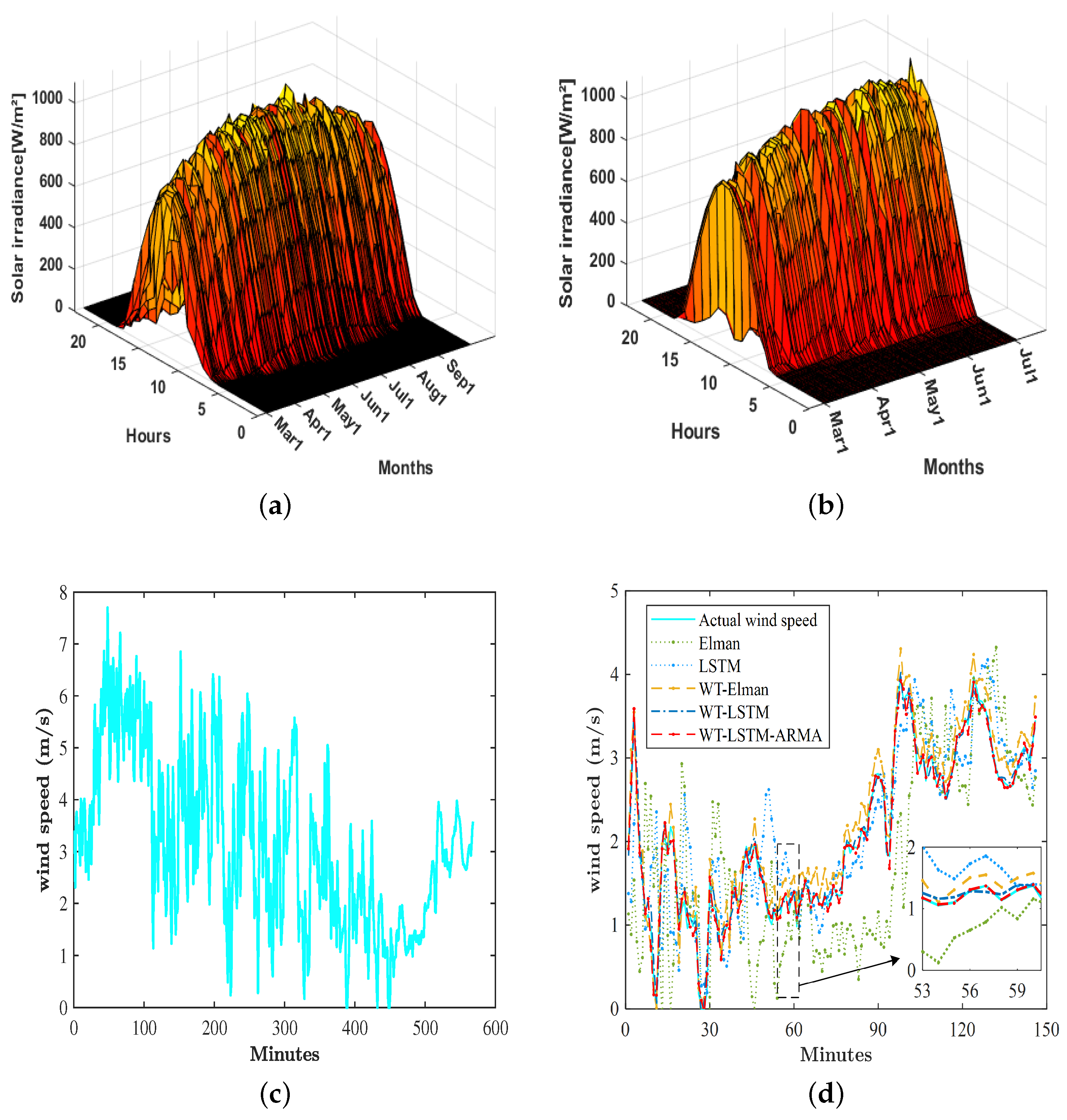
4.1. Model Evaluation
4.2. Mission and Results
4.3. Performance Analysis
4.3.1. Effect of Energy Management Strategy
4.3.2. Effect of Mission Requirements
5. Conclusions
- (1)
- The proposed SOC trajectory planning method with the EMS considers a solar income prediction model comprising cloud coverage, a multi-mode power model considering the direction of flow velocity and the disturbance of wind, and the full use of battery capacity. The method adopts long-term prediction and short-term dynamic error correction of the cyclic decreasing battery SOC in the multi-mode to maximize the use of the solar cell/battery and quickly complete the tasks.
- (2)
- An EMS of the SCUAV is proposed to control solar cell/battery output and power distribution. The implementation process is conducted according to the logical relationship (, and ) in four stages driven by three modes to improve energy management efficiency.
- (3)
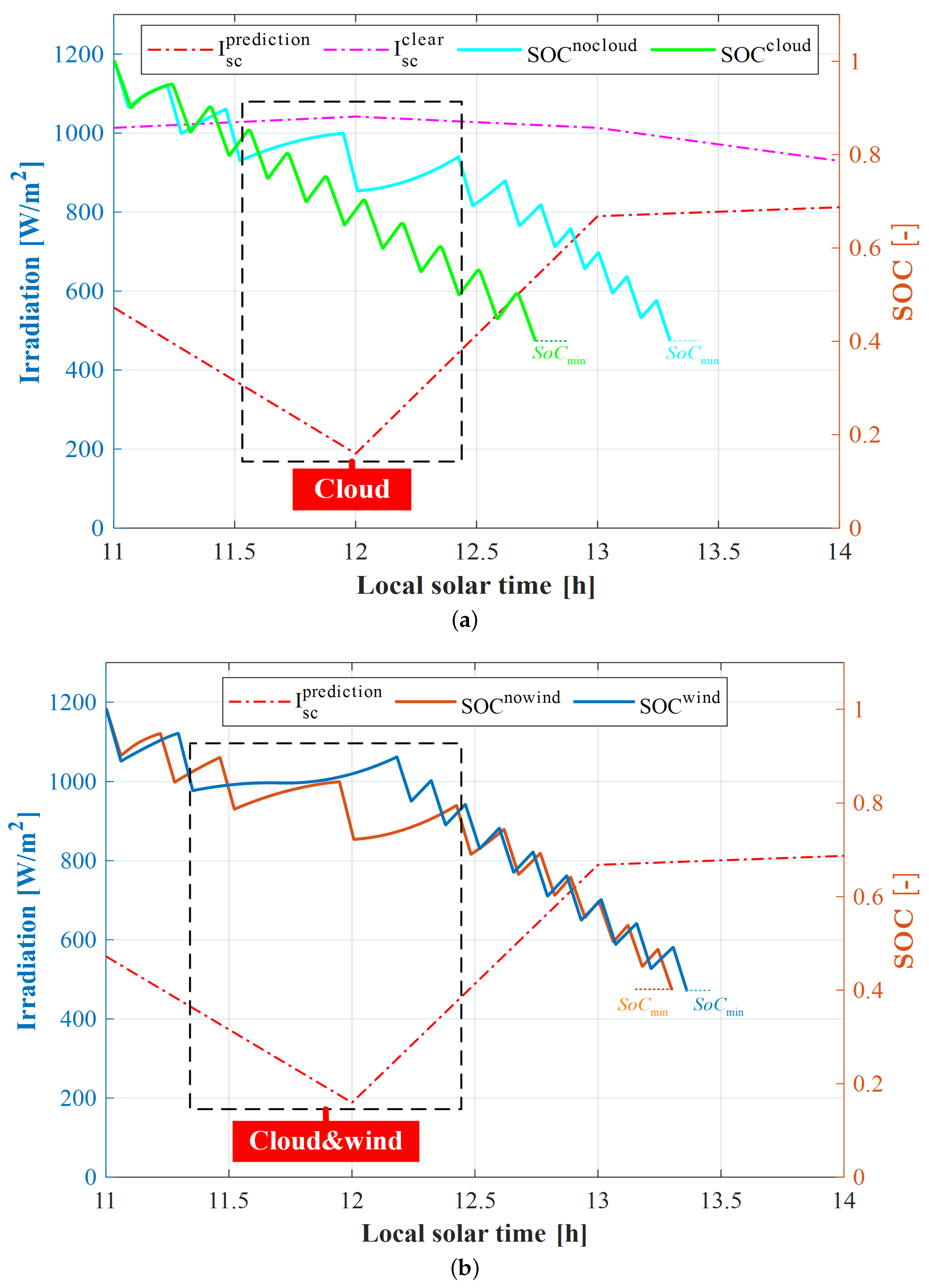
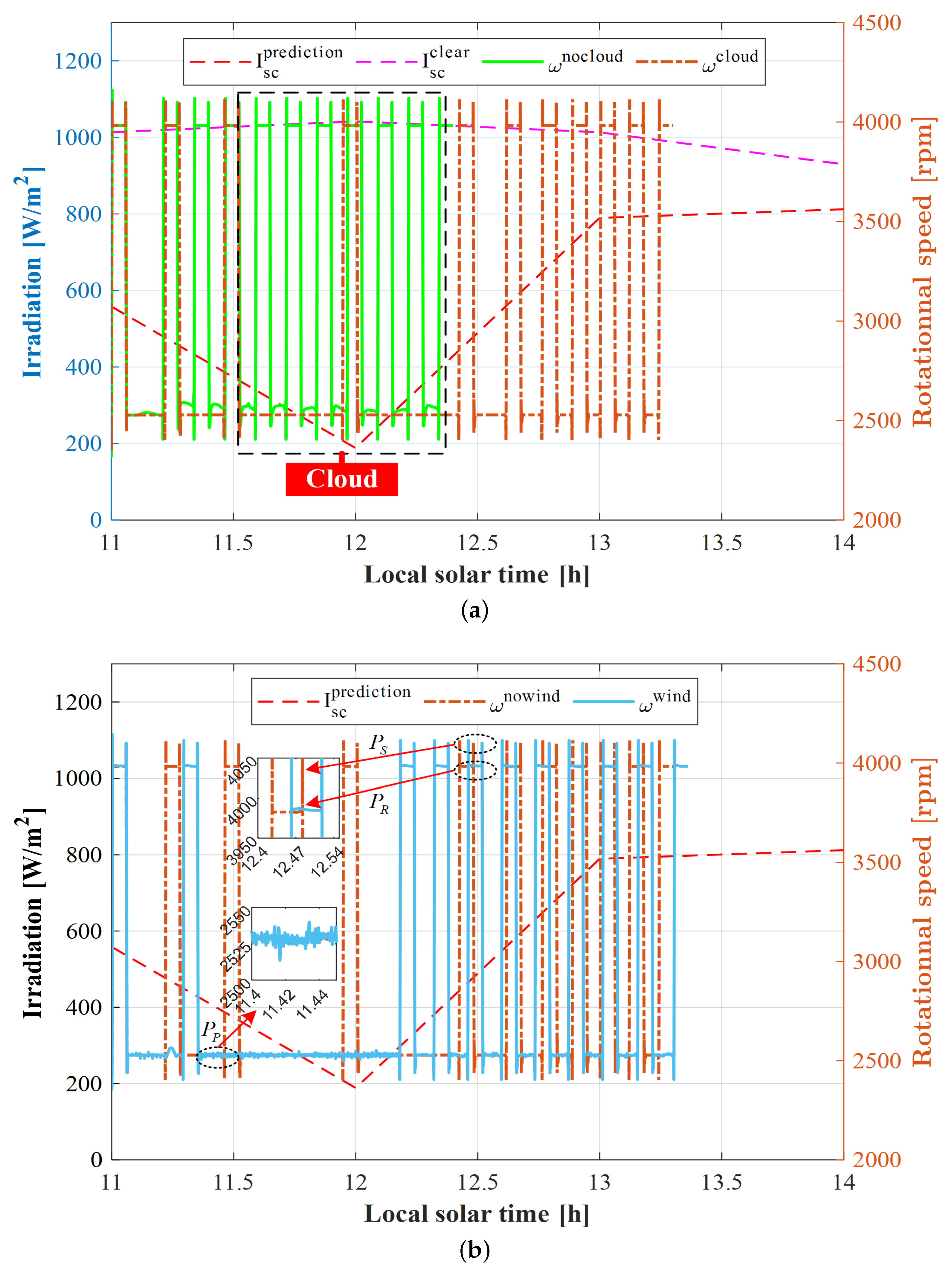
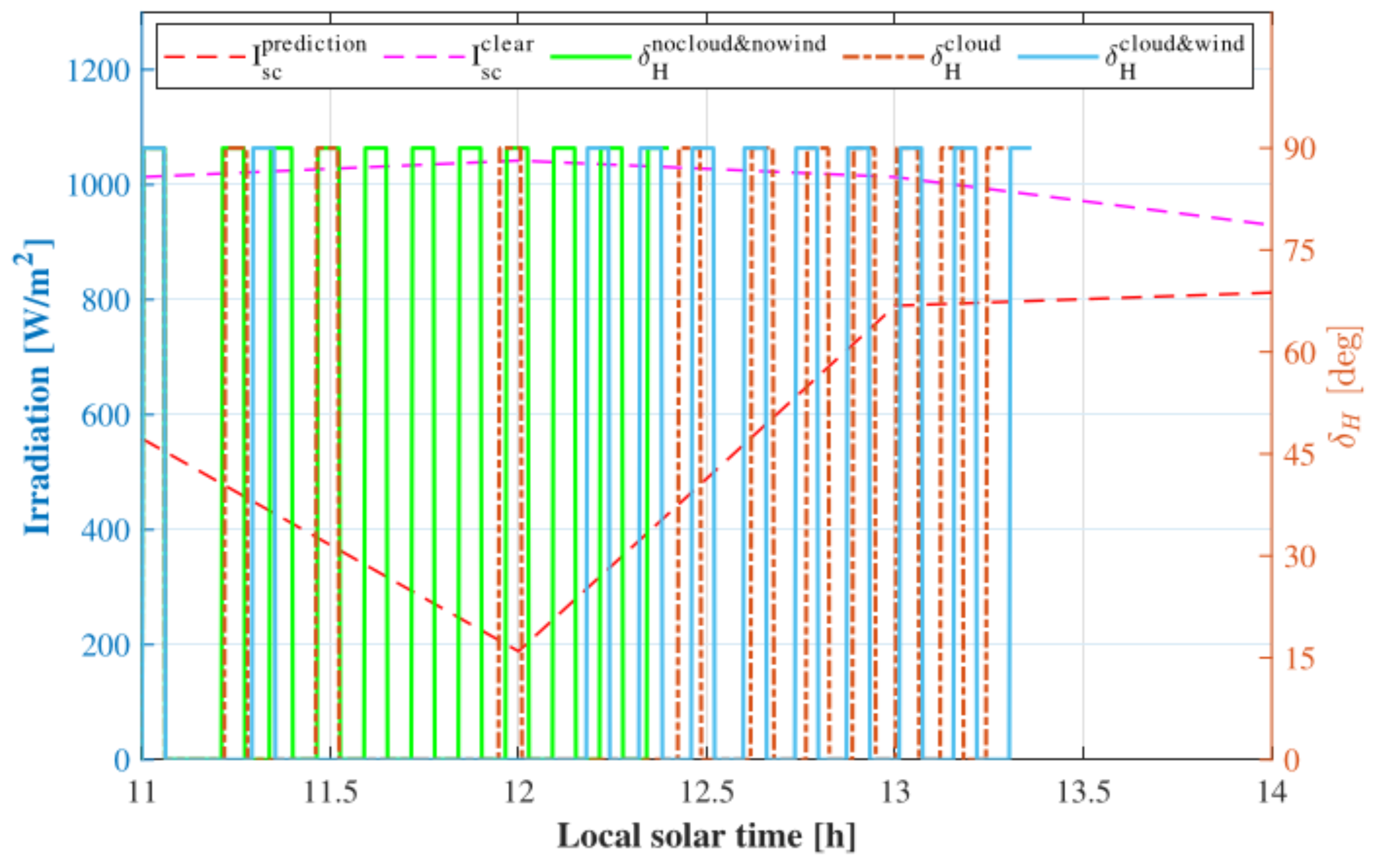
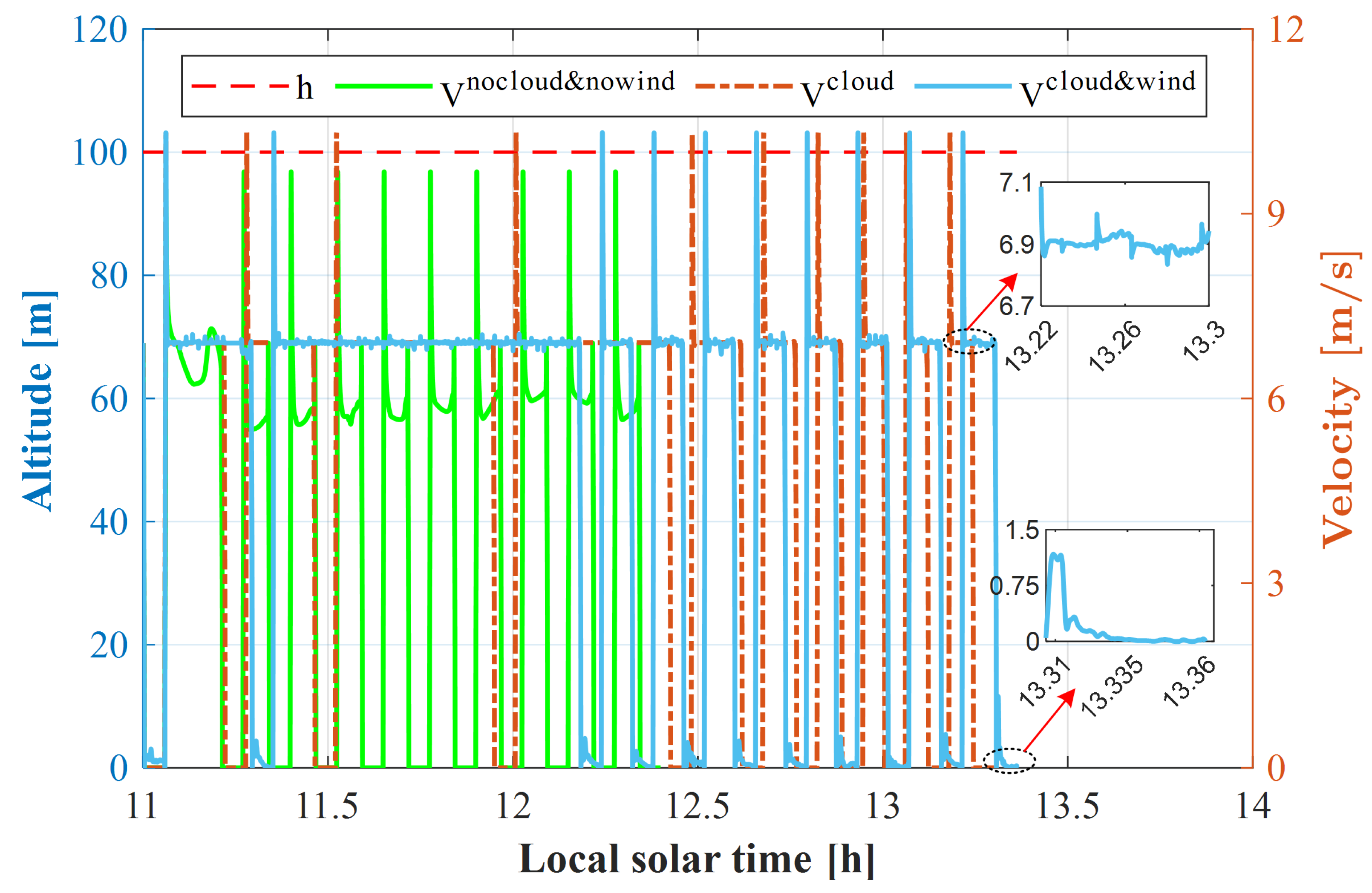
- Numerical and simulation results indicate the robustness of SCUAVs under cloud coverage and wind disturbance. The endurance with cloud coverage increased by 0.56 h compared to that with clear sky with the same operation conditions. Compared with the no-wind condition, wind disturbance increased the task requirement time by 0.06 h through increasing and decreasing the propulsion power of the multi-mode for each stage.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Noth, A. Design of Solar Powered Airplanes for Continous Flight. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2008. [Google Scholar]
- Zhu, X.; Guo, Z.; Hou, Z. Solar-powered airplanes: A historical perspective and future challenges. Prog. Aerosp. Sci. 2014, 71, 36–53. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Hinzmann, T.; Leutenegger, S.; Alexis, K.; Siegwart, R. Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight. J. Field Robot. 2017, 34, 1352–1377. [Google Scholar] [CrossRef]
- Danjuma, S.B.; Omar, Z.; Abdullah, M.N. Review of photovoltaic cells for solar-powered aircraft applications. Int. J. Eng. Technol. 2018, 7, 131–135. [Google Scholar]
- Chu, Y.; Ho, C.; Lee, Y.; Li, B. Development of a solar-powered unmanned aerial vehicle for extended flight endurance. Drones 2021, 5, 44. [Google Scholar] [CrossRef]
- Khan, N.R.; Raghorte, A.V.; Nandankar, P.V.; Waware, J.A. Solar powered UAV: A comprehensive review. In Proceedings of the AIP Conference Proceedings, Nagpur, India, 14–15 May 2022; Volume 2753. [Google Scholar]
- D’Sa, R. Design of a Transformable Unmanned Aerial Vehicle. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 2020. [Google Scholar]
- Peciak, M.; Skarka, W.; Mateja, K.; Gude, M. Impact analysis of solar cells on vertical take-off and landing (VTOL) fixed-wing UAV. Aerospace 2023, 10, 247. [Google Scholar] [CrossRef]
- Cao, X.; Liu, L.; Ge, J.; Yang, D. Conceptual design of long-endurance small solar-powered unmanned aerial vehicle with multiple tilts and hovers. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2023, 237, 3185–3201. [Google Scholar]
- Brandt, S.A.; Gilliam, F.T. Design analysis methodology for solar-powered aircraft. J. Aircr. 1995, 32, 703–709. [Google Scholar] [CrossRef]
- Langelaan, J.W.; Spletzer, J.; Montella, C.; Grenestedt, J. Wind field estimation for autonomous dynamic soaring. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 16–22. [Google Scholar]
- Zhong, G.X.; Xi, H.Z.; Zheng, G.; Xia, L.J.; Qian, C.X. The influence of wind shear to the performance of high-altitude solar-powered aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 1562–1573. [Google Scholar] [CrossRef]
- Gao, X. Research on High-Altitude Long-Endurance Flight Based on Energy Storage by Gravitational Potential and Energy Extraction from Wind Shear; National University of Defense Technology: Changsha, China, 2014. [Google Scholar]
- Chang, J.; Laliberté, J. Trajectory Optimization for Dynamic Soaring Remotely Piloted Aircraft with Under-Wing Solar Panels. J. Aircr. 2023, 60, 581–588. [Google Scholar] [CrossRef]
- Klesh, A.; Kabamba, P. Energy-optimal path planning for solar-powered aircraft in level flight. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6655. [Google Scholar]
- Spangelo, S.; Gilbert, E.; Klesh, A.; Kabamba, P.; Girard, A. Periodic energy-optimal path planning for solar-powered aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 6016. [Google Scholar]
- Huang, Y.; Chen, J.; Wang, H.; Su, G. A method of 3D path planning for solar-powered UAV with fixed target and solar tracking. Aerosp. Sci. Technol. 2019, 92, 831–838. [Google Scholar] [CrossRef]
- Hosseini, S.; Mesbahi, M. Energy-aware aerial surveillance for a long-endurance solar-powered unmanned aerial vehicles. J. Guid. Control. Dyn. 2016, 39, 1980–1993. [Google Scholar] [CrossRef]
- Shaoqi, W.; Dongli, M.; Muqing, Y.; Liang, Z. Three-dimensional optimal path planning for high-altitude solar-powered UAV. Acta Aeronaut. Astronaut. Sin. 2019, 45, 936–943. [Google Scholar]
- Wenjun, N.; Ying, B.; Di, W.; Xiaoping, M. Energy-optimal trajectory planning for solar-powered aircraft using soft actor-critic. Chin. J. Aeronaut. 2022, 35, 337–353. [Google Scholar]
- Xi, Z.; Wu, D.; Ni, W.; Ma, X. Energy-optimized trajectory planning for solar-powered aircraft in a wind field using reinforcement learning. IEEE Access 2022, 10, 87715–87732. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Lei, T.; Min, Z.; Gao, Q.; Song, L.; Zhang, X.; Zhang, X. The architecture optimization and energy management technology of aircraft power systems: A review and future trends. Energies 2022, 15, 4109. [Google Scholar] [CrossRef]
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Liu, J.X.; Chen, X.Q. Energy management strategy for solar-powered high-altitude long-endurance aircraft. Energy Convers. Manag. 2013, 70, 20–30. [Google Scholar] [CrossRef]
- Sun, M.; Shan, C.; Sun, K.-w.; Jia, Y.-h. Energy Management Strategy for High-Altitude Solar Aircraft Based on Multiple Flight Phases. Math. Probl. Eng. 2020, 2020, 6655031. [Google Scholar] [CrossRef]
- Wang, F.; Sun, X.; He, X.; Zhuo, F.; Yi, H. Research on Energy Optimal Control Strategy of DC PV-Energy Storage System for Unmanned Aerial Vehicle. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 2643–2651. [Google Scholar] [CrossRef]
- Qi, N.; Dai, K.; Yi, F.; Wang, X.; You, Z.; Zhao, J. An adaptive energy management strategy to extend battery lifetime of solar powered wireless sensor nodes. IEEE Access 2019, 7, 88289–88300. [Google Scholar] [CrossRef]
- Wang, H.; Li, P.; Xiao, H.; Zhou, X.; Lei, R. Intelligent energy management for solar-powered unmanned aerial vehicle using multi-objective genetic algorithm. Energy Convers. Manag. 2023, 280, 116805. [Google Scholar] [CrossRef]
- Ahmad, T.; Zhang, H.; Yan, B. A review on renewable energy and electricity requirement forecasting models for smart grid and buildings. Sustain. Cities Soc. 2020, 55, 102052. [Google Scholar] [CrossRef]
- Aslam, S.; Herodotou, H.; Mohsin, S.M.; Javaid, N.; Ashraf, N.; Aslam, S. A survey on deep learning methods for power load and renewable energy forecasting in smart microgrids. Renew. Sustain. Energy Rev. 2021, 144, 110992. [Google Scholar] [CrossRef]
- Blaga, R.; Sabadus, A.; Stefu, N.; Dughir, C.; Paulescu, M.; Badescu, V. A current perspective on the accuracy of incoming solar energy forecasting. Prog. Energy Combust. Sci. 2019, 70, 119–144. [Google Scholar] [CrossRef]
- Rahimi, N.; Park, S.; Choi, W.; Oh, B.; Kim, S.; Cho, Y.h.; Ahn, S.; Chong, C.; Kim, D.; Jin, C.; et al. A Comprehensive Review on Ensemble Solar Power Forecasting Algorithms. J. Electr. Eng. Technol. 2023, 18, 719–733. [Google Scholar] [CrossRef]
- Krishnan, N.; Kumar, K.R.; Inda, C.S. How solar radiation forecasting impacts the utilization of solar energy: A critical review. J. Clean. Prod. 2023, 388, 135860. [Google Scholar] [CrossRef]
- Cheng, L.; Zang, H.; Trivedi, A.; Srinivasan, D.; Ding, T.; Wei, Z.; Sun, G. Prediction of Non-Stationary Multi-Head Cloud Motion Vectors for Intra-Hourly Satellite-Derived Solar Power Forecasting. IEEE Trans. Power Syst. 2023. [Google Scholar] [CrossRef]
- Yang, D.; Yang, G.; Liu, B. Combining quantiles of calibrated solar forecasts from ensemble numerical weather prediction. Renew. Energy 2023, 215, 118993. [Google Scholar] [CrossRef]
- Abou Houran, M.; Bukhari, S.M.S.; Zafar, M.H.; Mansoor, M.; Chen, W. COA-CNN-LSTM: Coati optimization algorithm-based hybrid deep learning model for PV/wind power forecasting in smart grid applications. Appl. Energy 2023, 349, 121638. [Google Scholar] [CrossRef]
- Huang, X.; Liu, J.; Xu, S.; Li, C.; Li, Q.; Tai, Y. A 3D ConvLSTM-CNN network based on multi-channel color extraction for ultra-short-term solar irradiance forecasting. Energy 2023, 272, 127140. [Google Scholar] [CrossRef]
- Ajith, M.; Martínez-Ramón, M. Deep learning algorithms for very short term solar irradiance forecasting: A survey. Renew. Sustain. Energy Rev. 2023, 182, 113362. [Google Scholar] [CrossRef]
- Perne, M.; Kocijan, J.; Božnar, M.; Grašič, B.; Mlakar, P. Hybrid Forecasting of Wind for Air Pollution Dispersion over Complex Terrain. J. Environ. Inform. 2023, 41, 88–103. [Google Scholar] [CrossRef]
- Yang, B.; Zhong, L.; Wang, J.; Shu, H.; Zhang, X.; Yu, T.; Sun, L. State-of-the-art one-stop handbook on wind forecasting technologies: An overview of classifications, methodologies, and analysis. J. Clean. Prod. 2021, 283, 124628. [Google Scholar] [CrossRef]
- Liu, M.D.; Ding, L.; Bai, Y.L. Application of hybrid model based on empirical mode decomposition, novel recurrent neural networks and the ARIMA to wind speed prediction. Energy Convers. Manag. 2021, 233, 113917. [Google Scholar] [CrossRef]
- Ding, L.; Bai, Y.L.; Fan, M.H.; Yu, Q.H.; Zhu, Y.J.; Chen, X.Y. Serial-parallel dynamic echo state network: A hybrid dynamic model based on a chaotic coyote optimization algorithm for wind speed prediction. Expert Syst. Appl. 2023, 212, 118789. [Google Scholar] [CrossRef]
- Khan, W.; Nahon, M. A propeller model for general forward flight conditions. Int. J. Intell. Unmanned Syst. 2015, 3, 72–92. [Google Scholar] [CrossRef]
- Hu, S.; Ni, W.; Wang, X.; Jamalipour, A. Disguised Tailing and Video Surveillance with Solar-Powered Fixed-Wing Unmanned Aerial Vehicle. IEEE Trans. Veh. Technol. 2022, 71, 5507–5518. [Google Scholar] [CrossRef]
- Oettershagen, P. High-fidelity solar power income modeling for solar-electric uavs: Development and flight test based verification. arXiv 2017, arXiv:1703.07385. [Google Scholar]
- Ju, C.; Wang, P.; Goel, L.; Xu, Y. A Two-layer Energy Management System for Microgrids with Hybrid Energy Storage considering Degradation Costs. IEEE Trans. Smart Grid 2017, 9, 6047–6057. [Google Scholar] [CrossRef]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- APC. 2003. Available online: https://www.apcprop.com/technical-information/performance-data/ (accessed on 17 January 2024).
- Brandt, J.; Selig, M. Propeller performance data at low reynolds numbers. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011; p. 1255. [Google Scholar]
- Andreas, A.; Wilcox, S. Solar Technology Acceleration Center (SolarTAC). 2011. Available online: https://midcdmz.nrel.gov/apps/sitehome.pl?site=STAC (accessed on 11 February 2011).
- Yu, Z. Research on Tilt-Rotor UAV Transition Strategy. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2020. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Phase 1 | Phase 2 |
|---|---|---|
| or | ||
| Variables | Phase 3 | Phase 4 |
| or |
| Methods | RMSE | nRMSE | MBE | MAE | R |
|---|---|---|---|---|---|
| Elman | 83.9 | 0.35 | −2.6 | 43.8 | 0.96 |
| LSTM | 83.2 | 0.34 | −1.1 | 43.9 | 0.97 |
| WT-Elman | 49.3 | 0.2 | −34 | 42.5 | 0.99 |
| WT-LSTM | 42.2 | 0.17 | −32.1 | 35.7 | 0.99 |
| WT-LSTM-ARIMA | 34.2 | 0.14 | −0.81 | 24.7 | 0.99 |
| Methods | RMSE | nRMSE | MBE | MAE | R |
|---|---|---|---|---|---|
| Elman | 1.00 | 0.48 | 0.35 | 0.81 | 0.64 |
| LSTM | 0.58 | 0.28 | −0.08 | 0.44 | 0.83 |
| WT-Elman | 0.20 | 0.10 | −0.15 | 0.16 | 0.98 |
| WT-LSTM | 0.11 | 0.05 | −0.02 | 0.08 | 0.98 |
| WT-LSTM-ARIMA | 0.07 | 0.03 | 0.01 | 0.05 | 0.99 |
| Parameter | Value | Efficiency | Value |
|---|---|---|---|
| Mass of takeoff (kg) | 4.55 | Solar module | 0.2 |
| Mass of battery (kg) | 0.81 | Electric drive | 0.6 |
| Wing area (m2) | 1.28 | Battery charging | 0.95 |
| Area of solar cells (m2) | 1 | Battery discharging | 1.03 |
| Moment of head motor (m) | 0.55 | Solar wing camber | 0.95 |
| Moment of tail motor (m) | 0.55 | MPPT | 0.95 |
| Energy density of battery (Wh/kg) | 231 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, X.; Liu, L. State-of-Charge Trajectory Planning for Low-Altitude Solar-Powered Convertible UAV by Driven Modes. Drones 2024, 8, 80. https://doi.org/10.3390/drones8030080
Cao X, Liu L. State-of-Charge Trajectory Planning for Low-Altitude Solar-Powered Convertible UAV by Driven Modes. Drones. 2024; 8(3):80. https://doi.org/10.3390/drones8030080
Chicago/Turabian StyleCao, Xiao, and Li Liu. 2024. "State-of-Charge Trajectory Planning for Low-Altitude Solar-Powered Convertible UAV by Driven Modes" Drones 8, no. 3: 80. https://doi.org/10.3390/drones8030080
APA StyleCao, X., & Liu, L. (2024). State-of-Charge Trajectory Planning for Low-Altitude Solar-Powered Convertible UAV by Driven Modes. Drones, 8(3), 80. https://doi.org/10.3390/drones8030080