Abstract
Unmanned aerial systems and renewable energy are two research areas that have developed rapidly over the last few decades. Solar-powered unmanned aerial vehicles (SUAVs) are likely to become dominant in the near future. They have the advantage of low cost and safe operation features that mitigate the barriers to their use in various environments. Developing effective algorithms for navigating and deploying SUAVs is essential for implementing this technology in real-life applications. Effective navigation and deployment algorithms also ensure the safety and efficiency of SUAV operations. This comprehensive review paper summarizes some state-of-the-art SUAV applications and provides an overview of the navigation and deployment algorithms for SUAVs. Some commonly used energy-harvesting models are described as well. Finally, some interesting and promising directions for future SUAV research are suggested.
1. Introduction
Unmanned aerial vehicles (UAVs) can be defined as aircraft that fly without any onboard operator [1]. They were developed initially for military missions, and owing to their high maneuverability and unmanned operation features, they are proven to be the best fit for military surveillance operations [2]. With the development of modern technology, their significantly lower cost of manufacturing and reduced size are reasons UAVs are also used in many civilian applications, with applications including but not limited to 3D mapping [3], target tracking [4], site inspection [5], smart farming [6], and many more. Although UAVs can complete a mission following the control command of remote operators, their efficiency is not adequate. Therefore, an autonomous system is the next step to free up labor even more [7]. In light of this, some navigation and deployment strategies are needed to push UAV applications to the next level. However, the onboard battery’s capacity limits a UAV’s operation time, leading to increased difficulty in long-endurance missions.
To overcome this problem, using solar-powered UAVs (SUAVs) is a promising solution [8]. The Global SUAV Market 2020–2024 report states that the SUAV market is expected to grow by around USD 500 million by 2024 and has the potential to reach USD 3800 million by the end of 2033 [9]. In addition, numerous small private firms and large tech and aviation companies have been actively engaged in the SUAV market for a long time to develop state-of-the-art SUAVs, for example, Boeing, Google, and Airbus [10,11]. Equipping proper solar panels on UAVs provides them with the functionality to charge themselves while in the sunshine. In this way, renewable energy and robots are converging into an ecosystem where they are beneficial to each other [12].
Some research publications studied the hardware selection and sizing of SUAVs [13,14,15,16]. In particular, research work [16] presents an analysis of sizing for an SUAV designed for exploration over Mars. Multiple parameters affect both the cost and weight of SUAVs. Therefore, it is essential to find the balance between them to meet the needs of the tasks they are assigned. UAVs can be classified into three major categories based on their wing morphology: fixed-wing UAVs, single-rotor UAVs, and multirotor UAVs [17]. For the research problem being investigated here, multirotor UAVs and fixed-wing UAVs are better candidates as solar panels can be equipped on top of them more easily. Multirotor UAVs have a smaller size on which to install solar panels, but their maneuverability is much higher, and they can be used in more complicated environments like urban environments. In contrast, fixed-wing SUAVs have larger sizes for solar panels but lack some maneuverability, and they are more suitable for long-range missions in stable environments. In this review paper, SUAVs stand for both fixed-wing SUAVs and multirotor SUAVs. Both of them will be considered and will be discussed together without making a clear distinction.
Autonomous navigation can be defined as the ability to travel from a start node to the target while avoiding obstacles along the way without human interaction. For research on navigation of SUAVs, it is necessary not only to consider obstacle avoidance but also to maximize solar energy absorption as much as possible, which makes the problems under study even more challenging. In the meantime, the computational cost for path planning becomes higher due to the fact that the energy consumption and harvest models need to be considered. Some sophisticated optimization algorithms are required in order to handle this problem. Thus, problems with the navigation and deployment of SUAVs are more complicated than similar problems for traditional UAVs. Therefore, a comprehensive review is needed. However, a comprehensive review is lacking in this specific research direction. In the field of UAVs, the concept of “deployment” usually refers to the entire process of moving a drone from a state of readiness to an operational state. It includes but is not limited to the optimal placement of SUAVs for coverage-surveillance and vehicle-route problems of SUAVs. In addition, deploying SUAVs in stationary positions for surveillance or communication support represents a relatively immature research area that few researchers have investigated. Similar work has been conducted without the constraints of solar-powered devices, which can be extended to be applied to SUAVs in future research.
The existing survey papers on SUAVs did not fully explore the navigation and deployment techniques of SUAVs. Most of them focused on hardware selection, physical aspects, and energy management. Thus, this gap is filled by this comprehensive review paper. In addition, some novel research directions for SUAVs are proposed at the end of this paper. Those ideas can guide and push the development of SUAV research. The energy-powered feature is beneficial for the sustainable development of robotics technologies as well. Therefore, this paper reviews the navigation and deployment methods of SUAVs for civilian applications.
This paper gives the review methodology in Section 2 and an overview of civilian applications of SUAVs in Section 3. Section 4 introduces the energy model used for SUAVs. Section 5 lists the navigation strategies divided into three categories. Deployment applications and multi-UAVs are summarized in Section 6. After reviewing the state-of-the-art research works, some research challenges and future research directions are stated in Section 7. Finally, Section 8 concludes this paper.
2. Review Methodology
The first stage of this research involved a comprehensive search for the relevant literature. The databases searched included but were not limited to IEEE Xplore, Google Scholar, and ResearchGate. Following the identification of potential sources, the following selection criteria were applied to determine the relevance and high quality of the literature:
- Relevance to the research topic: only the literature related to SUAVs or that had inspiration related to SUAVs was included.
- Language of publication: only works published in English were considered.
- Peer-reviewed publications: peer-reviewed articles and conference papers were included to ensure the credibility and academic rigor of the sources.
As this research area is at a relatively early stage, most of the research work is included in this review paper. Thus, the search was not limited by publication year. In addition, in this scholarly review, we also systematically examine the literature on traditional UAVs with an emphasis on applications and methodologies that are highly transferable to SUAVs. This critical analysis is undertaken with the objective of informing and guiding future research in the field of SUAVs. This effort aims not only to illuminate potential avenues for innovation in SUAVs but also to highlight the need to adapt and refine existing UAV technologies to accommodate the unique needs and potential presented by solar system integration. The literature of traditional UAVs is primarily utilized in Section 6 and Section 7, owing to the current limitations in research on the deployment of SUAVs. In addition, during the research process, top-end journal articles were considered first to ensure the quality of the review. They include articles from IEEE Transactions on Aerospace and Electronic Systems, IEEE Transactions on Automatic Control, Automatica, Drones, IEEE Transactions on Communications, IEEE Transactions on Vehicular Technology, IEEE Internet of Things Journal, IEEE Transactions on Robotics, etc. Some peer-reviewed conference papers were also considered when the literature input was insufficient for the research topic. This review methodology provides a solid foundation for the review work.
3. Civilian Applications
The development of UAVs is vast in various industries and domains. From military to commercial applications, SUAVs with longer operation times have a dramatic advantage over traditional UAVs. Most SUAVs are installed with electric motors driven by photovoltaic cells and rechargeable onboard batteries. In addition, the size of the SUAV can be customized according to the required applications [15]. Therefore, they are trendy among various commercial applications. Numerous prototype demonstrations have been developed in the past [18]. Papers [19,20] briefly list the typical applications of SUAVs, but a more comprehensive review is needed. This section summarizes and details the specific applications for single and multiple SUAVs. The outline of this section is shown in Figure 1.
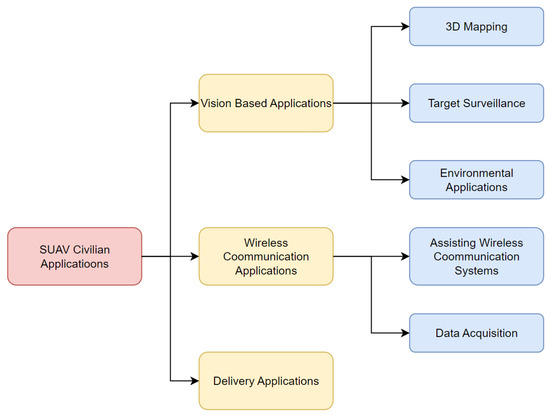
Figure 1.
Outline of applications.
3.1. Vision-Based Applications
With the rapid development of computer vision and vision-based technology, related applications are gradually being developed [21]. It is becoming common for UAVs to be fitted with cameras or sensors that allow them to be used in vision-based applications. Because fitting such hardware would significantly increase the aircraft’s energy consumption, SUAVs with longer operation time could be more adaptable to these application scenarios [22].
3.1.1. Target Surveillance
There are several papers about video surveillance applications of SUAVs [23,24,25,26,27,28,29,30,31] in different environments. Most of them investigate target-surveillance problems. The determining factors influencing the complexity of the problem include the number of SUAVs, the number of targets, and the motion of the SUAVs. A detailed comparison is listed in Table 1.

Table 1.
Vision-based applications.
Authors [23,24] focus on continuously surveilling a fixed ground target based on the limited 3D space and energy storage capability of SUAVs. A target-centered virtual cylinder is constructed around the fixed target according to this specific mission, and a path-planning framework is developed to maximize the overall energy efficiency. However, one shortcoming of the proposed methods is that the work does not consider the geometrical condition of the target. Consequently, the virtual cylinder may not be feasible in a more complex environment. As a comparison, papers [25,26,27,28,29,30] investigate the target-tracking problem for moving ground targets instead of fixed targets, which elevates the level of complexity. The paper [28] adds a disguised-tailing problem to the video surveillance problem. A fixed-wing SUAV is used to fulfill the mission. The simulation results show the algorithm surpasses current methods in its effectiveness for visual disguise and power efficiency. There are also further studies, such as Huang and Savkin [30], that investigate navigation problems for a team of SUAVs conducting video surveillance work for some moving targets. Multiple SUAVs are assigned to monitor the target periodically, which maximizes the total monitoring time. Their proposed method is proven to be effective via computer simulation. However, one shortcoming of the navigation method is that the trajectories of the moving targets are known information for the navigation system. Therefore, some further research is needed to fill the gap. Along with the target-tracking mission, SUAVs can also perform some general surveillance missions. Hosseinisianaki et al. [31] develop an energy-aware surveillance algorithm for SUAVs that leverages the energy storage and surveillance coverage of the flight. The optimal coverage range of the sensor is challenging when facing the requirement of maintaining a high energy-efficiency rate. Eventually, a comprehensive model is formulated for optimal coverage, path planning, and power allocation for an SUAV. All the aforementioned papers use SUAVs for video surveillance applications. The problem of multiple SUAVs with multiple targets is worth being researched in the future.
3.1.2. Environmental Applications
With the help of onboard solar panels and vision-enabled technology, SUAVs also play an essential role in agriculture applications [32,33]. Remote sensing technology allows SUAVs to conduct precision agriculture and smart farming missions. Herwitz et al. [32] discuss the potential of using SUAVs for coffee cultivation thanks to the wireless communication and imaging capabilities of SUAVs. To take it a step further, the authors of [33] demonstrate the safe and effective use of SUAVs for collecting commercial agricultural images, indicating the bright future of extending their usage in different agriculture sectors. Besides agriculture applications, SUAVs can also monitor environmental conditions [34,35,36,37,38]. Malaver et al. [34,35] use SUAVs to monitor greenhouse gases with a wireless sensor network. The third paper [36] designs an SUAV system capable of conducting a 6 h endurance mission at a 1000 m altitude, further proving the promising future of using SUAVs for environmental monitoring. In addition, the paper [37] integrates a wireless sensing network (WSN) with SUAVs for remote gas sensing. The developed system passed field trials at ground level and low altitudes, efficiently gathering, storing, and transmitting data in real time to a central hub for analysis and the creation of 3D maps. Furthermore, the very interesting research work [38] studies the possibilities and challenges of using SUAVs for Arctic research. The results of the study were very surprising, finding that SUAVs are well suited for use in the polar regions. In addition to their scientific use, SUAVs are valuable for surveying the polar regions, reducing the risk of navigation in these regions. The key advantage is their lower cost compared to satellite systems, along with a minimal impact on the environment. In [38], initial outcomes from a study on SUAVs by the German Aerospace Center are also discussed. Those successful prototypes can push the further-vision-based applications for SUAVs.
3.1.3. Three-Dimensional Mapping
Autonomous navigation is becoming more and more common to lower labor costs, which is essential to gather sufficient map information to increase navigation accuracy. The map-based system has predefined map information to preplan the route to guide the SUAV to follow a feasible, collision-free path. Three-dimensional mapping [39,40,41,42] thus becomes a popular research direction for unmanned systems. The first paper [39] states the effectiveness of image capturing by SUAVs, which is crucial for some vision-based applications. In addition, the Geographic Information System (GIS) is integrated into SUAVs for advanced data analysis. MARAAL [40] is a mature SUAV developed by Unmanned Aerial Laboratory IIT Kanpur that can be used for 3D-mapping applications. One highlight of this SUAV is that the coverage altitude is considerably high, varying from 1 km to 5 km above the ground. Furthermore, Karthik et al. [41] focus on designing and developing an SUAV for surveying, mapping, and disaster relief applications. Lastly, researchers [42] use SUAVs to collect ground images and transmit to a ground control station for cloud storage and subsequent digital processing. Four different research groups are assigned with various work to conduct the mission. The methodology of the whole system is presented in the paper. In summary, integrating solar energy in SUAVs has revolutionized the application of 3D mapping, offering extended flight durations and enhanced 3D-mapping capabilities.
3.2. Wireless Communication Applications
Wireless communication systems have become an important part of the big data era. A number of novel technologies need the support of a high data-transfer rate [43]. However, the deployment of traditional communication base stations is not cost-efficient and cannot meet the current technology’s needs. Therefore, a UAV-based aerial communication system is a promising solution, especially in a complex environment [44]. A further point worth mentioning is that SUAVs with much longer flight times are more suitable to be deployed as an aerial communication base. In this section, some popular wireless system applications [45,46,47,48,49,50,51,52,53,54,55,56,57,58] are presented.
3.2.1. Assisting Wireless Communication Systems
Wireless transceivers can be equipped on SUAVs to provide communication service while hovering in a specific position. In addition, the high maneuverability allows UAVs to secure communication services while flying. The papers [45,46] study the optimization problem for SUAV communication systems with multiple ground users. Both signal path loss and shadowing are considered to maximize energy efficiency and sustainability. Similarly, the authors of [47] consider a problem in which one SUAV is used to secure communication with one ground node in the presence of eavesdroppers. The developed algorithm is focused on optimizing the remaining energy of the SUAV and the overall period during which the SUAV can communicate securely with the fixed ground node. The algorithm differs from traditional distance minimization, providing a larger time frame to secure the communication service. Furthermore, the presence of eavesdroppers increases the difficulty of solving this problem. To take it a step further, Sun et al. [50] not only design the optimal 3D trajectory but also develop a resource allocation strategy for multicarrier SUAV communication systems by using the sole information of channel states. The optimal design provides a stable and sustainable communication service for the SUAV communication system. In 2004, the first generation of European very-long-endurance high-altitude solar-powered UAVs was designed and prototyped, called HELIPLAT [51,52]. The HELIPLAT platform has several advantages, including cost efficiency, gained by increased flight endurance and decreased maintenance and spare costs, and enhanced flight safety, gained by flying above traffic and weather conditions, with less interference with aviation traffic. It also offers extensive area coverage that requires fewer SUAVs per area. However, it does have limitations, notably in payload weight (less than 1500 N) and available power for the payload (1000–1200 W). Additionally, paper [51] shows the possibility of HELIPLAT being used for some communication applications. The authors of [56] use multiple SUAVs as the communication relay nodes for a fleet of marine vessels to improve the communication quality and maximize the energy absorption during a mission. All in all, with the support of the evidence from simulation results and prototype testing, SUAVs can be used for various communication applications in different environments.
3.2.2. Data Acquisition
Similar to the section on communication applications, this section mainly focuses on data acquisition applications [53,54,55]. SUAVs are used to acquire specific information instead of acting as an information base station. Wozniak and Jessa [53] develop a long-range data acquisition chain using SUAVs that specifically focuses on areas with poor electricity and communication infrastructures. The data acquired by SUAVs during the process can also be used for environmental monitoring applications. From their evaluation of more than fifty UAVs, it can be concluded that high cost and large size are not primary factors for the selection of UAVs. Additionally, the payload mass significantly influences the efficiency of different SUAVs. Building upon the insights and experiments provided by Wozniak and Jessa, Luo et al. [54] further explore other data acquisition applications. The authors address the problem of data acquisition from wireless sensor networks using SUAVs in an urban environment. Novel algorithms are proposed to optimize the trajectory to maximize sensor data collection. Another interesting research paper [55] addresses using LiDAR-equipped SUAVs for coastal surveillance in India. LiDAR is the main source of data collection that was designed to fulfill the specific needs of geologists conducting scientific research on coastal habitats over an extended time frame. The proposed methodology can be easily adapted for the conceptual design and sizing of SUAVs to satisfy large payload and mission specifications. All of these papers explore the scenarios to collect data from remote or inaccessible areas using SUAVs, marking a significant advancement in environmental monitoring and connectivity solutions.
3.3. Delivery Applications
UAVs can potentially reduce labor costs for deliveries, save time for last-step deliveries, and respond more quickly to emergencies [59]. In the near future, delivery by UAVs will have some effect on the traditional transportation delivery system. Their high maneuverability makes UAVs suitable for healthcare delivery for emergency surgery [60]. The paper [61] introduces a routing strategy for SUAV delivery systems in a complex urban environment. A pruning-based globally optimal algorithm is developed for this problem, giving a better simulation result than a traditional routing algorithm for normal UAVs. Unlike normal UAVs, SUAVs are not significantly limited by the capacity of the onboard batteries. In addition, the cost of deploying denser charging stations limits the development of UAV delivery systems. Using SUAVs for longer-range delivery can thus be seen as a promising solution. More research is needed on how to land safely in a very complex environment to push the implementation of this technology.
4. Energy Models of SUAVs
The main difference between a normal UAV and an SUAV is that the SUAV can harvest energy from sunlight. Papers [62,63] present conclusions about the energy system and solar cell selection for SUAVs. Onboard solar panels can convert solar energy to electrical energy, which gives SUAVs longer endurance with exposure to sunlight [64]. However, SUAVs cannot always harvest energy due to weather conditions or obstructions caused by obstacles. In this section, two main scenarios are considered: first, the energy model in cloudy conditions, and second, the energy model in cloud-free conditions.
4.1. Line of Sight
Before introducing the energy model, it is essential to find a way to determine whether obstacles are blocking sunlight. This is more applicable for multirotor SUAVs as they fit better in complex urban environments. For example, buildings taller than the SUAV in an urban environment could block direct sunlight, creating a shadowy area. The concept of line of sight (LoS) is commonly used to address this problem. Furthermore, LoS is commonly used in the target-tracking [65,66] and communication [67] fields. Huang and Savkin [30] implement LoS for an application that contains energy-harvesting and target-surveillance problems. The buildings in an urban environment can be treated as obstacles, blocking not only the movement of SUAVs but also the sunlight and the LoS between SUAVs and the target. For the LoS, the straight-line segment between two nodes and p are considered, where represents the position of the sun and represents the current coordinates of the SUAV. In this way, the situation can be described as follows [30]:
Therefore,
where is a scalar variable. The LoS can be determined by checking the intersection points between and p and any buildings. The assumption is that the full map information is given so the LoS can be determined.
4.2. Solar Energy Harvesting Models
The LoS check can provide information on whether the SUAV is under sunlight. With this information, the effects of clouds and obstacles can be determined. There are two main aspects of the energy models of SUAVs: energy consumption and harvest. The only difference in the energy consumption model is the increased weight due to additional solar panels. Thus, the energy consumption model is not discussed in this section. One crucial decision factor for the energy harvesting model is the cloud condition. Clouds lead to higher attenuation of solar power, as solar power is mainly centered at wavelengths smaller than 1 mm [68]. Therefore, two types of energy harvesting models are discussed based on whether or not the cloud condition is considered.
4.2.1. Cloud-Integrated Energy Model
This scenario needs to integrate the effect of the cloud into the solar energy model. Additionally, it is applicable when the altitude of the SUAV varies dramatically, potentially covering the altitude below, in, and over the clouds. The attenuation of the sunlight through a cloud can be modeled as follows [69]:
where represents the distance over which solar light travels through the cloud, and is the absorption coefficient that models the optical properties of the cloud. In addition, should be non-negative. Now, the cloud’s upper boundary and lower boundary are defined as and , respectively. Thus, the solar panel’s output power can be described as follows [50]:
where z is the altitude of the SUAV. The given function describes a scenario where the P grows exponentially as the SUAV ascends through the cloud but stabilizes at a constant value when below or above the cloud.
4.2.2. Energy Model without Taking Clouds into Account
One typical scenario for a cloud-free environment is when SUAVs fly high enough to eliminate cloud influence. Some fixed-wing SUAVs can achieve this altitude. Another scenario is when SUAVs are flying at a low altitude, so the obstructions by the obstacles are the main factor. Furthermore, SUAVs are assumed to be always under the cloud, and it is not realistic to optimize the path to avoid the shadow of the cloud. Because the position of the cloud is not proper predefined information, in this case, many researchers use the ASHRAE clear-sky model [70] to address the problem adequately [71,72]. It assumes that the SUAV always flies in a clear sky without any clouds. In addition, the model also provides data on the average solar irradiance. When the sunlight shines directly on the solar cells, the output electrical power can be described as follows [73]:
where stands for the efficiency of the solar cell, S represents the solar panels’ total area, and G is the solar spectral density. If only part of the solar panel is exposed to sunlight, can be changed accordingly to address the problem. The incident angle depends on the azimuth angle a and elevation angle e, which have the following relation:
Thus, the total solar energy harvested during time frame is
This model is the classic solar energy harvesting model and is the foundation for many other models. Equation (4) is also based on it.
Another widely used model is modified based on Equation (4) and can illustrate the effect of flight height better [54,74].
where represents the maximum value of atmospheric transmittance and stands for the scale height of the earth. It can be seen that the SUAV at higher altitudes can harvest more energy than that at lower altitudes.
5. SUAV Path-Planning Methods
UAVs can take off and land in various complex environments, making them widely used in multiple applications. A collision-free path is essential to the whole system when executing missions. Some traditional and widely used algorithms, for example, the Dijkstra algorithm [75], A-star algorithm [76], and rapidly exploring random tree (RRT) algorithm [77], can provide an initial path based on the map information. Path planning for SUAVs is not only a simple flight trajectory design but also a strategy to ensure the optimal use of energy and maximize the efficiency of mission execution. Correct path planning is directly related to the energy management and flight endurance of SUAVs. For SUAVs, energy consumption and harvest also need to be considered, making the path-planning problem much more challenging. Through intelligent path planning, SUAVs are able to efficiently accomplish their intended missions while maintaining an energy balance, which is essential for improving the operational performance and reliability of UAVs under various environmental conditions. This section summarizes commonly used path-planning strategies for SUAVs. Table 2 provides the list of references, the corresponding navigation strategy, and the number of SUAVs investigated.
Table 2.
Navigation strategy.
It can be seen from the table that the majority of previous works address the path-planning problem of SUAVs as an optimization problem. The total energy model must be defined and formulated as the cost function. In the meantime, some of them use RRT- or MPC-based algorithms to plan the path. The generated path is suboptimal compared to optimization-based methods, but the results are still feasible and reasonable. Another perspective is that the study of multiple-SUAV systems is far less than the single-SUAV system. For multiple-SUAV systems, the cost functions are more complex than a single-SUAV system in the same scenario. Therefore, the methodology behind multiple-SUAV systems is more complicated. In the field of path planning, strategies for SUAVs can usually be categorized into two main groups: path-oriented and coverage-oriented. Path-oriented planning focuses on determining the optimal trajectory of the UAV from the starting point to the end point, which needs to consider the position of the sun and the optimal angle of the solar panels, in order to maximize energy harvesting. Furthermore, path-oriented planning can be further categorized into sample-based and optimization-based methods. Coverage-oriented planning, on the other hand, focuses on covering a specific area to ensure that no data are collected or tasks are performed without omission and requires rational planning of flight times and routes to maximize energy efficiency in sunny conditions. Both methods have their advantages, and the choice depends on the specific mission of the UAV, the operating environment, and the availability of solar energy. Therefore, this section focuses on three parts: sample-based, optimization-based, and coverage-navigation methods.
5.1. Sample-Based Methods
Sample-based path-planning algorithms always require certain environmental information, and then the map is sampled as a set of nodes. Based on the newly sampled map, the algorithm can find a feasible path by searching and tuning the path. Rapidly exploring random tree (RRT) is one of the effective methods to address the energy-aware path-planning problem [29,30,47,48,78]. However, one shortcoming of RRT is that the generated path is not optimal. The path-planning part of paper [48] is straightforward for SUAVs. Firstly, some feasible paths are obtained using RRT* while satisfying the communication constraints and energy requirements at the same time. Secondly, the trajectory with the minimum energy consumption is selected. The simplicity is the advantage of this method so long as it has energy harvesting and consumption models. However, the algorithm itself is not involved with the energy models. In this case, authors [78] further modify the RRT algorithm to make it sensitive to energy costs. They research the application of inspecting mountain sites using an SUAV. The modified RRT* algorithm first finds a feasible path and then rewires the nodes if the residual energy is higher than the threshold energy level. The feasible path is broken into multiple subtours, and the algorithm aims to reduce the length of each subtour by replacing longer paths with more energy-efficient ones while maintaining the UAV’s energy requirements. This approach balances energy efficiency to reduce the overall completion time of the inspection tour, which can provide a relatively more optimal path than the previous one. In conclusion, all the research work mentioned before can solve the energy path-planning problem.
5.2. Optimization-Based Methods
Unlike sample-based navigation, optimization-based methods can find a close-to-optimal solution based on the derived objective function. Fu et al. [74] consider a 3D trajectory-planning problem while collecting data from ground devices using one SUAV. Both the energy model and communication model are considered for the issue. SUAVs are also used to charge ground communication devices through laser charging. Multiple objective functions are built to represent the mathematical models in the system. A convex optimization solver based on the interior-point method is used to solve this problem. The research [81] uses model predictive control (MPC) techniques to navigate an SUAV from a given starting point to a given end point while harvesting solar energy and providing two-way communication between multiple pairs of ground users in complex terrain. A trade-off between collected energy and power consumption is made based on the minimum throughput requirements of the ground users, which jointly optimizes the flight time and flight path of the UAV, taking into account energy conditions and meteorological variations in real time for low airspace and optimizing the flight time and energy consumption. Authors [82] solve the optimal-path-planning problem based on the gravitational potential energy. The objective function is defined by gravitational and battery residual energy while setting the yaw and pitch angles as control inputs. The method proposed in the article can allow the SUAV to use the residual energy during the daytime to increase the altitude of the flight and then not to consume any additional power in the night descent flight. On the other hand, paper [83] studies a similar problem but uses the branch and bound (BNB) method for optimization. Moreover, Euler angles and unit quaternions address the complexities in 3D flight models. Both papers aim to maximize the energy efficiency and effectiveness of SUAVs by exploring different methodologies in optimal path planning. In contrast to previous algorithms, Lunn et al. [86] focus on the target-searching problem in a dynamic environment. This path-planning problem differs from others because the target node is unknown during the planning phase. The gray wolf optimization algorithm has also been chosen as the solver for this problem. Different from previous research, multiple SUAVs’ cooperation is considered, and the repulsive force field in the artificial potential field method is used to design the collaboration cost function. In contrast to previous papers, authors [88,89] use a modified informed graph search algorithm to find the energy-efficient path. The energy model is considered as a cost function in the algorithm. The algorithm is applied in a 3D urban environment that uses multiple buildings to block the movement of the SUAV and block the LoS of the sun. Furthermore, paper [89] combines a simple biologically inspired obstacle avoidance algorithm to handle the unknown moving/static obstacles. The hybrid approach is developed to ensure the safe navigation of the process.
However, environmental effects, such as the effect of the wind, are not considered in any of the papers above. To fill the gap, papers [80,87,90] consider the wind effects during the path-planning stage. Wirth et al. [80] use particular software, “Meteorology-aware Trajectory Planning and Analysis Software for Solar-powered UAVs” (METPASS), for the simulation part. The model considers environmental hazards as well as wind and solar radiation, making the result more realistic. It is worth mentioning that a dynamic programming technique is used to plan the path more efficiently. Similar to this paper, authors [87] consider the SUAV path-planning problem in wind fields using direct collocation. Solar radiation and wind effects are evaluated using the numerical forecast model. A direct Hermite–Simpson configuration method with nonlinear programming is proposed for generating energy-optimal paths for solar UAVs in specific meteorological environments, integrating a new model of typical energy optimization and wind effects for solar UAVs and maximizing the flight objective function while satisfying constraints and boundary conditions and prolonging the flight endurance of solar UAVs in the meteorological environment. The time of flight in meteorological environments is prolonged. Furthermore, biomimetic (biologically inspired) solar energy harvesting/trajectory planning algorithms for SUAVs are developed in [90,91], where a mathematical model of the wind field is also proposed and a modified Bellman–Ford algorithm is used to construct the optimal SUAV trajectory through the wind field.
It can be seen that optimization-based algorithms have a wider usage to plan the path. Multiple cost functions can be considered to find the feasible or optimal path. In contrast, sample-based methods can provide a feasible path quicker that is easier to be applied in real-life applications. Environmental factors are considered to be ideal in most of the work, but there are still few researchers who take that into account. More research effort can be applied to make the problem more realistic with multiple environmental factors considered.
5.3. Coverage Navigation
Traditional path-planning algorithms focus more on obtaining a feasible path from a start node to a target node while satisfying some soft or hard constraints [92]. Sufficient map information is essential to planning the path effectively. Then, the coverage-path-planning algorithm is designed to fulfill the task. Papers [93,94,95] research the specific coverage-path-planning algorithm for SUAVs. Franco et al. [93] develop a back-and-forth algorithm for convex and concave areas to find the optimal coverage path. The path is divided into multiple segments after obtaining the full path. Then, the generated algorithm can compute the optimal speed for every single segment. Therefore, the total energy cost is suboptimal. However, the main advantage of the proposed method is that both coverage and energy cost are considered and optimized in the problem. Unlike in the previous literature, paper [94] adds a hotspot surveillance strategy to the coverage-planning algorithm. Both dynamic and endurance constraints are considered in the algorithm. Priority distribution is visible to SUAVs, making the path denser near higher-priority nodes. Du’s research [95] models the energy production and consumption of SUAVs, designs an overlay path-planning algorithm, defines the energy flow efficiency to evaluate the operational efficiency, and then establishes a MILP model to plan the paths to minimize the operational time, solve the problem of short flight time of traditional UAVs, and improve the energy utilization efficiency and operational efficiency of SUAVs.
In conclusion, the coverage navigation for SUAVs is a relatively immature area that few researchers have considered. The solar energy models make it more complicated than regular UAV coverage-navigation algorithms. More research is needed to fill the gap.
6. Deployment of SUAVs
The concept of deployment is not only a static placement for UAVs but also a description of the entire process of performing a mission [96,97,98,99]. In the case of SUAVs, this process not only includes physical startup and release but also involves energy management, route planning, mission scheduling, and system optimization. In SUAV deployment, weather conditions, solar efficiency, and battery management need to be considered to ensure that SUAVs are able to maintain an feasible energy balance for the duration of the mission. In addition, the deployment strategy needs to consider the SUAV’s flight path, flight altitude, and speed to maximize the efficiency of solar energy utilization and the ability to accomplish a given mission. Different mission requirements demand different strategies for SUAV deployment. As the path-planning strategies are already discussed in the previous section, this section will focus on the analysis and summary of other issues for SUAV deployment.
UAV deployment research is often focused on UAV-assisted communication missions, and in [100], the placement of UAV base stations is no longer a two-dimensional placement problem of the terrestrial base station but a three-dimensional placement problem that optimizes the deployment of the UAV at vertical altitude for energy-efficient UAV communication with the terrestrial terminals. Furthermore, efficient deployment maximizes energy efficiency due to the limited amount of energy available for the mission using batteries as a power source, and this deployment problem integrates the communication and energy ground utilization problems. In another study on solving the communication problem by optimizing UAV deployment [101], a rapid deployment solution is proposed to satisfy the need for providing wireless cellular services; we model the UAV deployment problem as a multicircle placement problem that maximizes the number of coverage users with different quality-of-service requirements. Study [102] proposes a deployment algorithm that overcomes communication loss due to obstruction by buildings or mountains through the collaborative optimal deployment of reconfigurable intelligent surfaces (RISs) as well as UAVs to maximize the success of the UAV, in timely execution and the transmission back to the IoT ground device of the number of computational tasks, and to minimize the total energy consumption of the UAV. These multiple studies demonstrate the great potential of UAV deployment in research in the directions of coverage area, communication synergy, and optimal strategies. From those papers, it can be seen that what limits the scope of UAV interaction is precisely the limited energy source of UAVs, which limits the possibilities of UAVs in deployment.
In order to provide a continuous source of energy and to achieve cleaner energy upgrades, a drone system equipped with photovoltaic modules has been proposed. Drones equipped with solar panels are able to draw additional energy from the sun in addition to the existing batteries, providing additional energy support when the drone needs more power or extended range [103]. However, when SUAVs are in operation, they will face the challenge of the impact of shadows on the PV modules, reducing the energy efficiency of the PV modules during deployment. Efficient deployment of solar-powered UAVs is critical to achieving their long-term, sustained, and autonomous operations. Effective deployment strategies can significantly improve the performance of SUAVs, reduce operational costs, and expand their range of applications. To address this issue while meeting the needs of a specific mission, several studies have been presented to inspire researchers.
6.1. Coverage Deployment for SUAVs
One solution to the problem of solar UAV deployment is to achieve a larger area coverage by designing a coverage deployment approach, which is often seen in some agricultural, communication, and surveillance missions. Different from the coverage path planning mentioned in the previous section, coverage deployment focuses more on the position of the UAVs. The UAVs may hover at some specific position for a long period of time. Since SUAVs are limited by energy sources, pure path planning cannot meet the needs of coverage-area-oriented missions, so with the assistance of solar energy and a proper deployment strategy, solar UAVs can cover a larger area.
In the study [104], an energy-efficient mission-deployment model for solar-based 3D UAV swarms to provide 5G coverage in rural areas is proposed, employing mixed integer linear programming (MILP) and genetic algorithms (GA) that focus on solving the trade-offs between different flight altitudes of the UAVs and their energy consumption, providing efficient UAV flight planning, increasing coverage, and reducing energy consumption. Paper [105] establishes a formal approach to the deployment problem involving multiple solar-powered UAVs in communication recovery. This is achieved by expanding upon the group multirole assignment (GMRA) concept. The proposed methods can deploy multiple SUAVs rapidly to establish a collaborative relay network within a short period of time. Some other research studied a similar energy-efficient coverage problem with traditional UAVs, which can guide future research in this area. The paper [106] addresses the efficient deployment of UAVs for border patrol to detect illegal entries. It formulates the problem as a Stackelberg game with two players: the border patrol agency (leader) and the illegal immigrant (follower). The leader optimizes UAV patrol paths, while the follower selects a border area to cross. The paper introduces a linear programming approach to manage the leader’s strategies and reduce the follower’s strategy space. The proposed approach in paper [107] tackles two multiobjective subproblems: selecting an optimal set of UAVs for deployment and optimizing coverage using hovering and camera rotations. Innovative algorithms, including SAGA for UAV selection and NSPGGA and DCXGA for coverage optimization, outperform existing methods. The paper [108] discusses the increasing need for agricultural mechanization. The paper introduces a Voronoi-based partitioning algorithm for finding optimal paths for intelligent vehicles and compares its results with various greedy approaches in solving the traveling salesperson problem for agricultural applications.
6.2. Vehicle Route Problem (VRP) for Solar UAV Deployment
In the deployment of SUAVs, interpreting their operational problem as a special kind of vehicle path problem (VRP) provides a unique perspective. This approach not only takes into account UAV flight paths and mission execution but also integrates energy constraints and time efficiency. In solving the VRP, it is not only important to optimize the route of each UAV but also to ensure the efficient operation of the overall network, which is crucial to improving the performance of solar UAVs in complex missions. By addressing VRP, SUAVs are able to achieve greater operational flexibility and efficiency, thus realizing their potential in a wide range of practical application scenarios.
In the survey paper [109], it is mentioned that in the UAV routing problem, i.e., the UAV variant of the VRP problem, it is necessary to find a set of locations to use as paths, and the authors always try to find a path that minimizes the operational cost. Meanwhile, in the study [110], a round-trip routing problem is presented, which finds shortest-time paths in a time-dependent network subject to a delivery deadline constraint and an energy-budget constraint. The problem is formulated to minimize immediate returns to the warehouse under two practical constraints. The first is the moment of arrival at the customer’s location, which embodies the arrival moment limit using a certain constraint value; the second constraint is that the energy consumption of the UAVs along this path is within a given budget, given the limited battery capacity. The problem fails to take into account the energy breakthroughs offered by solar-powered drones, but the algorithm is still worth talking about. Of more interest to us is the following study based on solar-powered drone logistics delivery [61]. A solar UAV cargo distribution system is proposed to plan the distribution tasks for a solar-powered UAV (SPU). Some advanced route-planning algorithms are proposed to minimize the overall mission time in a static-charging-efficiency environment. Routing in a dynamic-charging-efficiency environment is further considered, and some task scheduling protocols are designed to manage different tasks in the system. The optimal charging-time allocation (CTA) algorithm and the global optimal path-planning algorithm (GOA) with a pruning strategy are proposed to solve the path-planning problem in static-charging-efficiency environments, which transforms this problem into a multiconstrained routing problem with integrated multiobjective optimization.
Two main approaches have been widely adopted in the study of solutions to the UAV vehicle path problem (VRP): linear programming (LP) and heuristic algorithms, shown in Table 3. LP is known for its high accuracy and consideration of multiple constraints, but its main drawback is its high computational complexity for large-scale problems. In contrast, heuristic algorithms offer high computational efficiency and adaptability, making them ideal for dynamic and complex environments, although they may not be as accurate as LP methods. In the case of solar UAVs, although the solutions mentioned above are not specifically designed for them, these methods are still of great importance. The operation and deployment of solar UAVs are affected by many factors, such as weather conditions and sunlight duration and intensity, which are key factors to be considered when planning paths. By utilizing LP and heuristic algorithms, it is possible to provide effective path-planning and deployment strategies for solar-powered UAVs while taking these complex factors into account, ensuring that they can remain efficient and stable during long missions.Through these methods, solar-powered UAVs can be deployed and utilized in a more efficient and energy-saving manner while maintaining their sustainability in performing long-term missions.
Table 3.
Comparison of solutions of VRP for UAV deployment.
7. Current Challenges and Future Research Directions
7.1. Current Challenges
In the previous sections, the navigation and deployment techniques for civilian applications of SUAVs were introduced. However, there are still several open problems that merit further investigation. Because of the immature nature of the investigated research area, many issues are left to be fully resolved before integrating SUAV technologies into real life.
Primarily, while there are several small-scale SUAV navigation techniques for intricate settings, the majority of these research studies fail to consider environmental aspects. Accordingly, exploring the impact of environments’ variations in wind and solar angles of incidence is challenging, and this could serve as an exciting field for further research. In [116], the authors discuss the effects of different wind patterns on UAVs, providing an in-depth explanation of the mechanisms that interfere with the UAV’s orientation, location, and velocity. Integrating wind-based features and mathematical models to categorize wind quantitatively is an innovative concept. The factors taken into account in the overall classification are similarly extensive. Ultimately, the results are verified in terms of energy transmission and the influence of the UAV’s trajectory under varying wind conditions. The wind can not only affect the speed of the vehicle but also influence the movement of the SUAV. In the presence of solar panels, the multirotor UAV may therefore increase the area affected by the wind as well as the angle of light it receives. These influences are difficult to fully represent in simulation, and the impact is even greater in real-world application scenarios.
Based on the previous challenge, another perspective can be drawn out. The variation in the angle of sunlight incidence on the solar panel can dramatically influence the energy absorption efficiency. This variation is due to not only the variability of sunlight itself but also the changing orientation of the SUAV. The efficiency may also vary during a long flight, as the vehicle may travel through areas with low sunlight intensity, potentially leading to energy shortages for the SUAV. Furthermore, since the vehicle may not maintain a fixed altitude, variations in altitude and latitude are other factors that need to be considered. In addition, since the sun moves during the flight, the incident angle may change significantly if the mission is of sufficient duration. Multiple aforementioned factors can potentially influence the solar cell efficiency of the SUAV, making the investigated problem require very careful consideration. The question of how to comprehensively consider all factors before deploying a drone, or to create a model that is closest to reality during simulation, is a challenging aspect.
Last but not least, the hardware considerations for SUAVs present a significant challenge. The advantage of equipping a solar panel on UAVs is obvious, but there are some constraints that need to be discussed. The increase in the vehicle weight may compromise the energy consumption during the flight. More energy is drawn in the same given amount of time when the total weight in increased. Additionally, the payload of the vehicle can be influenced because of that. Compromises must be considered during the initial stages of building SUAVs. Furthermore, the manufacturing costs of SUAVs are higher than those of traditional UAVs. Although investing more in the early stages can be profitable in the long run, this factor should not be overlooked. These issues need to be fully considered when implementing SUAVs. It is because of these challenges that the implementation of SUAVs has been relatively slow for civilian applications.
7.2. Future Research Directions
In light of the research results in the field of SUAV navigation and deployment, there exist multiple encouraging avenues for future investigation. The examination of deployment methods for SUAVs has been insufficient. It is possible to achieve comparable outcomes to the development of UAVs demonstrated in the papers [117,118], which can be regarded as a viable approach. More research directions are discussed in this section.
7.2.1. Combining Reconfigurable Intelligent Surface Technologies
Reconfigurable intelligent surfaces (RISs) are a novel technology that can make data communication more efficient [119]. Even if obstacles block the LoS between a UAV and sensors, data can still be transmitted to the UAV via an indirect path through an RIS. Therefore, multi-UAV communication systems can benefit a lot from using RIS technologies. Research on the multi-SUAV communication systems with RIS technology is a novel research direction that can maximize the communication efficiency and coverage of the system. Such systems can benefit from using ground-based RISs [120,121] or using RIS-equipped SUAVs [122,123]. Some research can be conducted in this specific research area.
7.2.2. SUAVs on Uneven Terrain
One limitation of aerial mobile robots is that they are often unsuitable for missions that should be conducted very close to the ground. An ongoing topic of extensive debate is the navigation of UAVs in rough terrain. One proposed method in [124] enhances a simulated annealing technique that optimizes the placement of waypoints to expand the coverage area. This allows UAVs to conduct efficient surveillance on uneven terrain. In [125], the proposed method enhances data transmission efficiency over uneven terrain, reduces energy consumption and time delays, and takes into account time limits of ground sensors and data-gathering concerns. Further research could be conducted considering SUAVs are deployed over uneven terrain, where RIS technologies might offer significant assistance.
7.2.3. Multidimensional Robot Collaboration
Inspired by the previous direction, research in recent decades has explored the collaboration between airborne and ground-based robots [126,127]. The use of teams of collaborating UAVs and unmanned ground vehicles (UGVs) is quickly growing in many civilian applications. However, current research still does not fully consider the problem of collaborative navigation of aerial and ground robots on uneven terrain, which becomes a potential direction for future research. Research can be further extended to scenarios with SUAVs collaborating with marine vehicles, for example, the navigation of UAVs collaborating with marine unmanned vehicles, including both unmanned surface vehicles and autonomous underwater vehicles, for environmental data collection. However, UAVs have far less endurance than ground robots, which limits their widespread use. Consequently, SUAVs with extended endurance can fulfill such missions more effectively than traditional UAVs. Calibrating SUAVs with ground mobile robots and marine unmanned vehicles is another promising research direction.
7.2.4. Natural Disaster Monitoring
Monitoring natural disasters is an extremely important area of UAV applications. Among these disasters, earthquakes and forest fires [128] pose a serious threat to many countries due to their very high humanitarian, environmental, and economic costs. Therefore, the application of multi-UAV technology especially plays a crucial role in addressing these challenges. SUAVs have the ability to swiftly evaluate the situation on-site following a disaster, as well as actively contribute to disaster relief efforts and environmental surveillance, thereby significantly enhancing the efficiency and effectiveness of responses to natural disasters. An application of an emergency relief distribution system after an earthquake using small UAVs was proposed in [129]. This scheme mainly focuses on the utilization of UAVs to carry out the distribution of relief supplies in the disaster area, gather critical data, and provide recommendations for relief priorities depending on the conditions. This application enhances both the effectiveness of rescue efforts and the ability to precisely evaluate the consequence of disasters and execute efficient rescue missions. When it comes to volcano detection, SUAVs offer unparalleled flexibility and a wider field of view than traditional ground-based monitoring methods, allowing for the collection of large amounts of elevation data in a relatively short period of time. The application of this technology improves the accuracy of volcanic activity predictions and facilitates and improves volcano mapping, characterization, interpretation, monitoring, and hazard assessment. There exist some research publications that demonstrate the superiority of UAVs in volcano detection [130,131,132]. Technically, the flight time of a UAV is limited by its power source. According to the study, the flight time of UAVs varies between 4 and 20 min [133]. In remote areas such as volcanoes, where charging grids are not readily available, the need to carry a large number of batteries has in the past been an added burden to volcano detection efforts. The use of SUAVs, on the other hand, can address the energy implications and change the past dilemma of noncontinuous monitoring to obtain richer data. We see in this not only the great potential of UAVs for volcano exploration and data collection missions but also the merits of SUAVs to further optimize and enhance mission efficiency and mission sustainability. In the future, the utilization of SUAVs in disaster relief is expected to become an essential and progressively prominent field of research and implementation.
7.2.5. Wildlife Monitoring
Similar to natural disaster monitoring, wildlife monitoring [134,135,136] plays the same important role. UAVs can provide higher precision monitoring than traditional methods. Moreover, the high mobility of animals makes them harder to monitor by stationary ground stations. The long endurance of SUAVs makes long-distance surveillance and control of wildlife more beneficial and reliable. Furthermore, a difficult challenge in UAV wildlife monitoring is making UAV surveillance covert to avoid scaring wild animals. In [137], a biomimetic (biologically inspired) sliding-mode control-based navigation algorithm mimicking motion camouflage stealth behavior observed in some attacking animals, such as hoverflies, dragonflies, and falcons, was proposed. Based on this, an interesting future research direction is to combine the biomimetic navigation algorithm for covert video surveillance of [137] with an efficient solar-power harvesting method for implementation with SUAVs. This leads to a further branch in the field, as SUAVs can be used for both ground and marine wildlife monitoring. The use of UAVs in fisheries has opened a new chapter in the sustainable utilization of marine resources. These UAVs are capable of flying for long periods of time over vast areas of the sea to monitor the dynamics of fish stocks and provide real-time data on marine ecosystems, while also helping fishermen to locate fish stocks more accurately; monitoring marine pollution and illegal fishing activities; and making a contribution to marine policing, thereby supporting the development of sustainable fisheries [138]. Using UAVs in fish farming is becoming a popular option. In [139], fishery inspection equipment combining a UAV and an unmanned boat is mentioned, which can realize underwater daily management, video information collection, and breeding ecological environment monitoring and realize the all-round perception of environmental and ecological information and fish feeding information of smart fish farms [140,141,142]. In addition to this, some research has been conducted for shark monitoring [143], which can also be extended for SUAV applications. SUAVs have a bright future in this application thanks to the easier access to solar energy for longer flights over unobstructed seas.
7.2.6. Smart Agriculture
Furthermore, adequate data information can be used in smart agriculture [144]. A typical scenario can be described as follows: a large number of ground sensors are deployed in a remote agricultural field for sensing and monitoring temperature, soil moisture, and other environmental parameters. SUAVs can be used to collect the data from the ground sensors. In this way, the joint SUAV navigation and communication scheduling for sensor data collection in smart agriculture can be a future research direction. Similar work has been conducted on normal UAVs [145], but SUAVs have a brighter future with longer endurance. Based on this, a special case can be introduced of a vineyard in a mountainous area, where LoS between SUAVs and ground sensors is often blocked by the terrain. The complexity of the problem is pushed to another level that is worth comprehensive and detailed research.
7.2.7. Machine Learning Techniques
Within the framework of the big data era, the examination of vast amounts of data holds significant importance for further progress. In light of the development of AI technology, machine learning and other AI-based tools can be a powerful and robust solver for solving optimization problems [146,147,148]. To enhance the performance of SUAVs, it is imperative to create advanced AI-assisted optimization methods. By employing these instruments to greatly enhance the effectiveness of solar energy harvesting and minimize energy consumption, not only will the operational duration of UAVs be substantially prolonged but the advancement of SUAV technology as a whole will be facilitated. These advancements will expand the potential uses of UAVs, encompassing various significant sectors such as environmental monitoring, traffic control, and emergency response. Another interesting topic for future research is applying optimization methods based on the dynamic programming/Bellman optimality principle [149,150] for SUAV navigation. This approach is especially promising in various problems of joint navigation/sensor data transmission control that are similar to the problems studied in [125,145].
7.2.8. Energy Management Methods and Hybrid SUAVs
Energy management methods for SUAVs can be a topic that deserves to be studied. Due to the capacity limitation of the onboard battery, properly controlling the time allocation of using battery energy and solar energy can extend the flight time of an SUAV [151]. In this case, another control variable is born that increases the difficulty of the problem. The next topic can thus be introduced from this, the hybrid UAVs. There have been some studies on hybrid UAVs using solar energy and some other forms of energy sources, for example, a fossil-fuel- and solar-powered UAV [152], wind- and solar-energy-powered UAV [153], and RF- and solar-energy-powered UAV [154,155]. The energy management method is worth being researched on hybrid UAVs.
7.2.9. Multi-SUAVs’ Self-Collision Avoidance
Another important challenge in navigation of SUAV teams is that the developed navigation algorithm should also guarantee that collisions are avoided between SUAVs. This make the involved optimization problems far more difficult, as the dimension of the optimization space increases n times, where n is the number of SUAVs in the team. This greatly increases the computational complexity of navigation algorithms, which is similar to [30]. All in all, this research direction is still an immature field, with many novel applications and algorithms to be developed and investigated.
8. Conclusions
The navigation and deployment of SUAVs are more challenging than in traditional UAVs. In addition to the typical issues faced by UAVs, such as obstacle avoidance, communication control, and surveillance quality, SUAVs also require the maximization of solar energy harvesting. This additional challenge makes the overall problem of navigation significantly more demanding and necessitates the use of more sophisticated optimization algorithms. This paper first summarizes the applications of SUAVs and their navigation strategies. Then, the deployment methods of SUAVs are outlined, followed by the future research directions for SUAVs. Both navigation and deployment strategies play a crucial part in unmanned aerial systems; they not only secure a safe flight but also decrease the total energy consumption during the mission. Especially for SUAVs, optimized flight can further increase energy efficiency, which can help with the sustainability development of the world. Currently, the navigation of SUAVs has made some progress, but the deployment of SUAVs in stationary positions for surveillance or communication support is an area where not that many researchers have worked. Although the differences from normal UAVs are not apparent, the energy model that SUAVs bring makes the problem more interesting and challenging. Some promising and important future research directions are summarized in the end. In conclusion, this comprehensive review of the navigation and deployment of SUAVs for civilian applications can provide valuable insights and inspiration for scholars in related fields to pursue further research.
Author Contributions
Conceptualization, S.L. and A.V.S.; methodology, S.L. and A.V.S.; validation, S.L.; formal analysis, S.L.; writing—original draft preparation, S.L., Z.F., S.C.V. and J.W.; writing—review and editing, S.L., S.C.V. and A.V.S.; supervision, A.V.S.; project administration, A.V.S.; funding acquisition, A.V.S. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Australian Research Council. This work also received funding from the Australian Government, via grant AUSMURIB000001 associated with ONR MURI grant N00014-19-1-2571.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Muchiri, G.; Kimathi, S. A review of applications and potential applications of UAV. In Proceedings of the Sustainable Research and Innovation Conference, 5–7 October 2022; pp. 280–283. [Google Scholar]
- Ma’Sum, M.A.; Arrofi, M.K.; Jati, G.; Arifin, F.; Kurniawan, M.N.; Mursanto, P.; Jatmiko, W. Simulation of intelligent unmanned aerial vehicle (UAV) for military surveillance. In Proceedings of the 2013 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Sanur Bali, Indonesia, 28–29 September 2013; pp. 161–166. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, F.; Zhang, B.; Ma, R.; Hao, Q. Development of UAV-based target tracking and recognition systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3409–3422. [Google Scholar] [CrossRef]
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z.T.H. State-of-the-art technologies for UAV inspections. IET Radar Sonar Navig. 2018, 12, 151–164. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2022, 18, 100187. [Google Scholar] [CrossRef]
- Tisdale, J.; Kim, Z.; Hedrick, J.K. Autonomous UAV path planning and estimation. IEEE Robot. Autom. Mag. 2009, 16, 35–42. [Google Scholar] [CrossRef]
- Safyanu, B.D.; Abdullah, M.N.; Omar, Z. Review of power device for solar-powered aircraft applications. J. Aerosp. Technol. Manag. 2019, 11, e4119. [Google Scholar] [CrossRef]
- Global Solar-Powered UAV Market 2020–2024; TechNavio: Elmhurst, IL, USA, 2020.
- Engblom, W. Novel Approach to High-Altitude, Long-Endurance Stationkeeping. In Proceedings of the 30th AIAA Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012; p. 3203. [Google Scholar]
- Harris, M. Project Skybender: Google’s secretive 5G internet drone tests revealed. Guardian 2016, 29. [Google Scholar]
- Hassan, A.A.; El Habrouk, M.; Deghedie, S. Renewable Energy for Robots and Robots for Renewable Energy—A Review. Robotica 2020, 38, 1576–1604. [Google Scholar] [CrossRef]
- Jashnani, S.; Nada, T.; Ishfaq, M.; Khamker, A.; Shaholia, P. Sizing and preliminary hardware testing of solar powered UAV. Egypt. J. Remote Sens. Space Sci. 2013, 16, 189–198. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Hinzmann, T.; Leutenegger, S.; Alexis, K.; Siegwart, R. Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight. J. Field Robot. 2017, 34, 1352–1377. [Google Scholar] [CrossRef]
- Rajendran, P.; Smith, H. Implications of longitude and latitude on the size of solar-powered UAV. Energy Convers. Manag. 2015, 98, 107–114. [Google Scholar] [CrossRef]
- Gupta, P.; Poojary, A.J.; Pant, R.S. Conceptual Design and Sizing of a Solar Powered Tilt-Rotor Hybrid UAV for exploration over Mars. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023; p. 4070. [Google Scholar]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned aerial vehicle classification, applications and challenges: A review. Preprints 2018, 2018110601. [Google Scholar] [CrossRef]
- El-Atab, N.; Mishra, R.B.; Alshanbari, R.; Hussain, M.M. Solar powered small unmanned aerial vehicles: A review. Energy Technol. 2021, 9, 2100587. [Google Scholar] [CrossRef]
- Pal, S.; Mishra, A.; Singh, P. Recent Trends in Long Endurance Solar Powered UAVs: A Review. Int. J. Adv. Sci. Technol. 2021, 19, 6009–6018. [Google Scholar]
- Zhu, X.; Guo, Z.; Hou, Z. Solar-powered airplanes: A historical perspective and future challenges. Prog. Aerosp. Sci. 2014, 71, 36–53. [Google Scholar] [CrossRef]
- Lu, Y.; Xue, Z.; Xia, G.S.; Zhang, L. A survey on vision-based UAV navigation. Geo-Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef]
- Abbe, G.; Smith, H. Technological development trends in Solar-powered Aircraft Systems. Renew. Sustain. Energy Rev. 2016, 60, 770–783. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, J.; Wang, H.; Su, G. A method of 3D path planning for solar-powered UAV with fixed target and solar tracking. Aerosp. Sci. Technol. 2019, 92, 831–838. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, J.; Su, G.; Wang, H.; Liu, R.; Du, P. Energy-optimal path planning for solar-powered UAVs monitoring stationary target. In Proceedings of the 4th ACM SIGSPATIAL International Workshop on Safety and Resilience, Seattle, WA, USA, 6 November 2018; pp. 1–8. [Google Scholar]
- Wu, J.; Wang, H.; Huang, Y.; Su, Z.; Zhang, M. Energy management strategy for solar-powered UAV long-endurance target tracking. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1878–1891. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Li, N.; Yao, P.; Huang, Y.; Su, Z.; Yu, Y. Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by Adaptive Grasshopper Optimization Algorithm. Aerosp. Sci. Technol. 2017, 70, 497–510. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Yao, P. Energy-optimal path planning for solar-powered UAV with tracking moving ground target. Aerosp. Sci. Technol. 2016, 53, 241–251. [Google Scholar] [CrossRef]
- Hu, S.; Ni, W.; Wang, X.; Jamalipour, A. Disguised tailing and video surveillance with solar-powered fixed-wing unmanned aerial vehicle. IEEE Trans. Veh. Technol. 2022, 71, 5507–5518. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Energy-efficient decentralized navigation of a team of solar-powered UAVs for collaborative eavesdropping on a mobile ground target in urban environments. Ad. Hoc. Netw. 2021, 117, 102485. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Energy-Efficient Autonomous Navigation of Solar-Powered UAVs for Surveillance of Mobile Ground Targets in Urban Environments. Energies 2020, 13, 5563. [Google Scholar] [CrossRef]
- Hosseinisianaki, S.; Mesbahi, M. Energy aware aerial surveillance for a long endurance solar-powered UAV. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4552. [Google Scholar]
- Herwitz, S.; Johnson, L.; Arvesen, J.; Higgins, R.; Leung, J.; Dunagan, S. Precision agriculture as a commercial application for solar-powered unmanned aerial vehicles. In Proceedings of the 1st UAV Conference, Singapore, 26 June 2002; p. 3404. [Google Scholar]
- Herwitz, S.R.; Dunagan, S.; Sullivan, D.; Higgins, R.; Johnson, L.; Zheng, J.; Slye, R.; Brass, J.; Leung, J.; Gallmeyer, B.; et al. Solar-powered UAV mission for agricultural decision support. In Proceedings of the IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium, Proceedings (IEEE Cat. No. 03CH37477). Toulouse, France, 21–25 July 2003; Volume 3, pp. 1692–1694. [Google Scholar]
- Malaver Rojas, J.; Gonzalez, F.; Motta, N.; Villa, T.F.; Etse, V.; Puig Garcia, E. Design and flight testing of an integrated solar powered UAV and WSN for greenhouse gas monitoring emissions in agricultural farms. In Proceedings of the IROS Workshop on Agri-Food Robotics, Hamburg, Germany, 2 October 2015; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2015; pp. 1–6. [Google Scholar]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and integration of a solar powered unmanned aerial vehicle and a wireless sensor network to monitor greenhouse gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef]
- Thipyopas, C.; Sripawadkul, V.; Warin, N. Design and development of a small solar-powered UAV for environmental monitoring application. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 316–319. [Google Scholar]
- Rojas, A.J.; Gonzalez, L.F.; Motta, N.; Villa, T.F. Design and flight testing of an integrated solar powered UAV and WSN for remote gas sensing. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar]
- Runge, H.; Rack, W.; Ruiz-Leon, A.; Hepperle, M. A solar powered hale-uav for arctic research. In Proceedings of the 1st CEAS European Air and Space Conference, Bonn, Germany, 15 September 2007. [Google Scholar]
- Oettershagen, P.; Stastny, T.; Mantel, T.; Melzer, A.; Rudin, K.; Gohl, P.; Agamennoni, G.; Alexis, K.; Siegwart, R. Long-endurance sensing and mapping using a hand-launchable solar-powered UAV. In Field and Service Robotics: Results of the 10th International Conference; Springer: Berlin/Heidelberg, Germany, 2016; pp. 441–454. [Google Scholar]
- Dwivedi, V.S.; Patrikar, J.; Addamane, A.; Ghosh, A. MARAAL: A low altitude long endurance solar powered UAV for surveillance and mapping applications. In Proceedings of the 2018 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; pp. 449–454. [Google Scholar]
- Karthik, M.; Usha, S.; Predeep, B.; Saran, G.; Sridhar, G.; Theeksith, R. Design and development of solar powered unmanned aerial vehicle (UAV) for surveying, mapping and disaster relief. AIP Conf. Proc. 2021, 2387, 140025. [Google Scholar]
- Ramos, A.; Santiago, M.; Shiguemori, E.; Serokhvostov, S.; Gupta, P.; Zhong, L. Solar-powered UAV platform system: A case study for ground change detection. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, ICAS 2018, Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Chettri, L.; Bera, R. A comprehensive survey on Internet of Things (IoT) toward 5G wireless systems. IEEE Internet Things J. 2019, 7, 16–32. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Padilla, G.E.G.; Kim, K.J.; Park, S.H.; Yu, K.H. Flight path planning of solar-powered UAV for sustainable communication relay. IEEE Robot. Autom. Lett. 2020, 5, 6772–6779. [Google Scholar] [CrossRef]
- Song, X.; Chang, Z.; Guo, X.; Wu, P.; Hämäläinen, T. Energy efficient optimization for solar-powered UAV communications system. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Huang, H.; Savkin, A.V. Autonomous navigation of a solar-powered UAV for secure communication in urban environments with eavesdropping avoidance. Future Internet 2020, 12, 170. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Ni, W. Energy-efficient 3D navigation of a solar-powered UAV for secure communication in the presence of eavesdroppers and no-fly zones. Energies 2020, 13, 1445. [Google Scholar] [CrossRef]
- Sun, Y.; Ng, D.W.K.; Xu, D.; Dai, L.; Schober, R. Resource allocation for solar powered UAV communication systems. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar]
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems. IEEE Trans. Commun. 2019, 67, 4281–4298. [Google Scholar] [CrossRef]
- Romeo, G.; Frulla, G. HELIPLAT®: High altitude very-long endurance solar powered UAV for telecommunication and Earth observation applications. Aeronaut. J. 2004, 108, 277–293. [Google Scholar] [CrossRef]
- Romeo, G.; Frulla, G.; Cestino, E.; Corsino, G. HELIPLAT: Design, aerodynamic, structural analysis of long-endurance solar-powered stratospheric platform. J. Aircr. 2004, 41, 1505–1520. [Google Scholar] [CrossRef]
- Woźniak, W.; Jessa, M. Selection of solar powered unmanned aerial vehicles for a long range data acquisition chain. Sensors 2021, 21, 2772. [Google Scholar] [CrossRef]
- Luo, C.; Hu, J.; Hou, Y.; Hong, Y.; Zhu, Y.; Li, D. Maximizing the amount of data collected from WSN based on solar-powered UAV in urban environment. J. Comb. Optim. 2023, 45, 132. [Google Scholar] [CrossRef]
- Uddin, N.; Pant, R.S. Conceptual Design and Sizing of LiDAR-Equipped Solar-Powered HALE UAV for Coastal Surveillance in India. In International Symposium on Aviation Technology, MRO, and Operations; Springer: Berlin/Heidelberg, Germany, 2021; pp. 159–169. [Google Scholar]
- Lun, Y.; Yao, P.; Wang, Y. Trajectory optimization of SUAV for marine vessels communication relay mission. IEEE Syst. J. 2020, 14, 5014–5024. [Google Scholar] [CrossRef]
- Seng, S.; Yang, G.; Li, X.; Ji, H.; Luo, C. Energy-efficient communications in solar-powered unmanned aerial systems. In Proceedings of the GLOBECOM 2020-2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Yang, G.; Luo, C. Performance Improvement in UAV Communication Systems with Uncertain Solar Energy Supply. IEEE Internet Things J. 2023, 10, 19607–19616. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man, Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Scott, J.E.; Scott, C.H. Drone Delivery Models for Healthcare. In Proceedings of the Hawaii International Conference on System Sciences, Waikoloa, HI, USA, 4–7 January 2017. [Google Scholar]
- Tian, Z.; Haas, Z.J.; Shinde, S. Routing in Solar-Powered UAV Delivery System. Drones 2022, 6, 282. [Google Scholar] [CrossRef]
- Rajendran, P.; Smith, H. Review of solar and battery power system development for solar-powered electric unmanned aerial vehicles. Adv. Mater. Res. 2015, 1125, 641–647. [Google Scholar] [CrossRef]
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2460–2466. [Google Scholar]
- Khan, N.R.; Raghorte, A.V.; Nandankar, P.V.; Waware, J.A. Solar powered UAV: A comprehensive review. AIP Conf. Proc. 2023, 2753, 020016. [Google Scholar]
- Rysdyk, R. UAV path following for constant line-of-sight. In Proceedings of the 2nd AIAA “Unmanned Unlimited” Conf. and Workshop & Exhibit, San Diego, CA, USA, 15–18 September 2003; p. 6626. [Google Scholar]
- Kim, J.; Kim, Y. Moving ground target tracking in dense obstacle areas using UAVs. IFAC Proc. Vol. 2008, 41, 8552–8557. [Google Scholar] [CrossRef]
- Mohammed, I.; Collings, I.B.; Hanly, S.V. Line of sight probability prediction for UAV communication. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Zhang, J.; Lou, M.; Xiang, L.; Hu, L. Power cognition: Enabling intelligent energy harvesting and resource allocation for solar-powered UAVs. Future Gener. Comput. Syst. 2020, 110, 658–664. [Google Scholar] [CrossRef]
- Kokhanovsky, A. Optical properties of terrestrial clouds. Earth-Sci. Rev. 2004, 64, 189–241. [Google Scholar] [CrossRef]
- Sayigh, A. Solar Energy Engineering; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Baldock, N.; Mokhtarzadeh-Dehghan, M. A study of solar-powered, high-altitude unmanned aerial vehicles. Aircr. Eng. Aerosp. Technol. 2006, 78, 187–193. [Google Scholar] [CrossRef]
- Wei, X.; Yao, P.; Xie, Z. Comprehensive optimization of energy storage and standoff tracking for solar-powered UAV. IEEE Syst. J. 2020, 14, 5133–5143. [Google Scholar] [CrossRef]
- Klesh, A.T.; Kabamba, P.T. Solar-powered aircraft: Energy-optimal path planning and perpetual endurance. J. Guid. Control. Dyn. 2009, 32, 1320–1329. [Google Scholar] [CrossRef]
- Fu, Y.; Mei, H.; Wang, K.; Yang, K. Joint optimization of 3D trajectory and scheduling for solar-powered UAV systems. IEEE Trans. Veh. Technol. 2021, 70, 3972–3977. [Google Scholar] [CrossRef]
- Bondy, J.A. Graph Theory with Applications; Macmillan: London, UK, 1982. [Google Scholar]
- Hart, P.; Nilsson, N.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- LaValle, S.M.; Kuffner, J.J.; Donald, B. Rapidly-exploring random trees: Progress and prospects. Algorithmic Comput. Robot. New Dir. 2001, 5, 293–308. [Google Scholar]
- Huang, H.; Savkin, A.V. Path planning for a solar-powered UAV inspecting mountain sites for safety and rescue. Energies 2021, 14, 1968. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Li, N.; Yao, P.; Huang, Y.; Yang, H. Path planning for solar-powered UAV in urban environment. Neurocomputing 2018, 275, 2055–2065. [Google Scholar] [CrossRef]
- Wirth, L.; Oettershagen, P.; Ambühl, J.; Siegwart, R. Meteorological path planning using dynamic programming for a solar-powered UAV. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–11. [Google Scholar]
- Tuan, H.D.; Nasir, A.A.; Savkin, A.V.; Poor, H.V.; Dutkiewicz, E. MPC-based UAV navigation for simultaneous solar-energy harvesting and two-way communications. IEEE J. Sel. Areas Commun. 2021, 39, 3459–3474. [Google Scholar] [CrossRef]
- Lee, J.S.; Yu, K.H. Optimal Path Planning of Solar-Powered UAV Using Gravitational Potential Energy. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1442–1451. [Google Scholar] [CrossRef]
- Dai, R.; Lee, U.; Hosseini, S.; Mesbahi, M. Optimal path planning for solar-powered UAVs based on unit quaternions. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3104–3109. [Google Scholar]
- Spangelo, S.C.; Gilbert, E.G. Power optimization of solar-powered aircraft with specified closed ground tracks. J. Aircr. 2013, 50, 232–238. [Google Scholar] [CrossRef]
- Hosseini, S.; Dai, R.; Mesbahi, M. Optimal path planning and power allocation for a long endurance solar-powered UAV. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 2588–2593. [Google Scholar]
- Lun, Y.; Wang, H.; Wu, J.; Liu, Y.; Wang, Y. Target Search in Dynamic Environments with Multiple Solar-Powered UAVs. IEEE Trans. Veh. Technol. 2022, 71, 9309–9321. [Google Scholar] [CrossRef]
- Kim, S.H.; Padilla, G.E.G.; Kim, K.J.; Yu, K.H. Flight path planning for a solar powered UAV in wind fields using direct collocation. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1094–1105. [Google Scholar] [CrossRef]
- Li, S.; Wei, J. Energy-Aware 3D Navigation of a Solar-powered UAV in an Urban Environment. In Proceedings of the 2024 16th International Conference on Computer and Automation Engineering (ICCAE), Melbourne, Australia, 14–16 March 2024. [Google Scholar]
- Li, S.; Wei, J. A Hybrid Approach for Navigation of a Solar-powered UAV in a Dynamic Urban Environment. In Proceedings of the 2024 Australian & New Zealand Control Conference (ANZCC), Gold Coast, Australia, 1–2 February 2024. [Google Scholar]
- Gudmundsson, S.; Golubev, V.V.; Drakunov, S.; Reinholtz, C. A Biomimemic Energy-Conserving/Harvesting Trajectory Planning for a sUAV. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, San Antonio, TX, USA, 5–9 February 2017; p. 3889. [Google Scholar]
- Gudmundsson, S.; Golubev, V.; Drakunov, S.; Reinholtz, C. Bio-Inspired Methodologies for Energy Conservation and Harvesting Flight-Path Modeling for Unmanned Aerial System. J. Aerosp. Inf. Syst. 2019, 16, 289–295. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Energy-Aware Coverage Path Planning of UAVs. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 111–117. [Google Scholar] [CrossRef]
- Vasisht, S.; Mesbahi, M. Trajectory design and coverage control for solar-powered UAVs. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 21 June 2015; p. 1314. [Google Scholar]
- Du, N.; Zhang, Z.; Chen, J.; Liu, X.; Zhang, K.; Ma, B. A Coverage Path Planning Method Based on Multiple Solar Powered Unmanned Aerial Vehicles. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; pp. 131–135. [Google Scholar]
- Huang, H.; Savkin, A.V.; Huang, C. Autonomous Navigation and Deployment of UAVs for Communication, Surveillance and Delivery; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar]
- Lin, N.; Liu, Y.; Zhao, L.; Wu, D.O.; Wang, Y. An adaptive UAV deployment scheme for emergency networking. IEEE Trans. Wirel. Commun. 2021, 21, 2383–2398. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, M.; Feng, G.; Qin, S.; Wei, F. Autonomous On-Demand Deployment for UAV Assisted Wireless Networks. IEEE Trans. Wirel. Commun. 2023, 22, 9488–9501. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, H.; Wu, W.; Wei, J. Deployment algorithms for UAV airborne networks toward on-demand coverage. IEEE J. Sel. Areas Commun. 2018, 36, 2015–2031. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station for maximum coverage of users with different QoS requirements. IEEE Wirel. Commun. Lett. 2017, 7, 38–41. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. Joint multi-UAV path planning and LoS communication for mobile-edge computing in IoT networks with RISs. IEEE Internet Things J. 2022, 10, 2720–2727. [Google Scholar] [CrossRef]
- Xu, Y.; Zhu, W.; Li, J.; Zhang, L. Improvement of endurance performance for high-altitude solar-powered airships: A review. Acta Astronaut. 2020, 167, 245–259. [Google Scholar] [CrossRef]
- Galan-Jimenez, J.; Moguel, E.; Garcia-Alonso, J.; Berrocal, J. Energy-efficient and solar powered mission planning of UAV swarms to reduce the coverage gap in rural areas: The 3D case. Ad. Hoc. Netw. 2021, 118, 102517. [Google Scholar] [CrossRef]
- Jiang, Q.; Zhu, H.; Qiao, Y.; He, Z.; Liu, D.; Huang, B. Agent evaluation in deployment of multi-SUAVs for communication recovery. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 6968–6982. [Google Scholar] [CrossRef]
- Lei, X.; Hu, X.; Wang, G.; Luo, H. A multi-UAV deployment method for border patrolling based on Stackelberg game. J. Syst. Eng. Electron. 2023, 34, 99–116. [Google Scholar] [CrossRef]
- Mohamadi, H.E.; Kara, N.; Lagha, M. Efficient algorithms for decision making and coverage deployment of connected multi-low-altitude platforms. Expert Syst. Appl. 2021, 184, 115529. [Google Scholar] [CrossRef]
- Tahilyani, S.; Saxena, S.; Karras, D.A.; Gupta, S.K.; Dixit, C.K.; Haralayya, B. Deployment of Autonomous Vehicles in Agricultural and using Voronoi Partitioning. In Proceedings of the 2022 International Conference on Knowledge Engineering and Communication Systems (ICKES), Chickballapur, India, 28–29 December 2022. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.A.H.; Campbell, J.F.; Golden, B.L.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. Round trip routing for energy-efficient drone delivery based on a public transportation network. IEEE Trans. Transp. Electrif. 2020, 6, 1368–1376. [Google Scholar] [CrossRef]
- Hong, Y.; Jung, S.; Kim, S.; Cha, J. Multi-UAV routing with priority using mixed integer linear programming. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 699–702. [Google Scholar]
- Culligan, K.; Valenti, M.; Kuwata, Y.; How, J.P. Three-dimensional flight experiments using on-line mixed-integer linear programming trajectory optimization. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 5322–5327. [Google Scholar]
- Zhao, C.; Liu, Y.; Yu, L.; Li, W. Stochastic Heuristic Algorithms for Multi-UAV Cooperative Path Planning. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 7677–7682. [Google Scholar]
- Cho, J.W.; Kim, J.H. Performance comparison of heuristic algorithms for UAV deployment with low power consumption. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 17–19 October 2018; pp. 1067–1069. [Google Scholar]
- Xiao, J.; Zhang, T.; Du, J.; Zhang, X. An evolutionary multiobjective route grouping-based heuristic algorithm for large-scale capacitated vehicle routing problems. IEEE Trans. Cybern. 2019, 51, 4173–4186. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.H.; Wang, D.B.; Ali, Z.A.; Ting Ting, B.; Wang, H. An overview of various kinds of wind effects on unmanned aerial vehicle. Meas. Control 2019, 52, 731–739. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Deployment of heterogeneous UAV base stations for optimal quality of coverage. IEEE Internet Things J. 2022, 9, 16429–16437. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. A method for optimized deployment of unmanned aerial vehicles for maximum coverage and minimum interference in cellular networks. IEEE Trans. Ind. Inform. 2018, 15, 2638–2647. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Mu, X.; Hou, T.; Xu, J.; Di Renzo, M.; Al-Dhahir, N. Reconfigurable intelligent surfaces: Principles and opportunities. IEEE Commun. Surv. Tutor. 2021, 23, 1546–1577. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. Collision-Free 3-D Navigation of a UAV Team for Optimal Data Collection in Internet-of-Things Networks With Reconfigurable Intelligent Surfaces. IEEE Syst. J. 2023, 17, 4070–4077. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. On-Demand Deployment of Aerial Base Stations for Coverage Enhancement in Reconfigurable Intelligent Surface-Assisted Cellular Networks on Uneven Terrains. IEEE Commun. Lett. 2022, 27, 666–670. [Google Scholar] [CrossRef]
- Eskandari, M.; Savkin, A.V. Trajectory Planning for UAVs equipped with RISs to Provide Aerial LoS Service for Mobile Nodes in 5G/Optical Wireless Communication Networks. IEEE Trans. Veh. Technol. 2023, 72, 8216–8221. [Google Scholar] [CrossRef]
- Eskandari, M.; Huang, H.; Savkin, A.V.; Ni, W. Model Predictive Control-Based 3D Navigation of a RIS-Equipped UAV for LoS Wireless Communication With a Ground Intelligent Vehicle. IEEE Trans. Intell. Veh. 2023, 8, 2371–2384. [Google Scholar] [CrossRef]
- Stodola, P.; Drozd, J.; Mazal, J.; Hodickỳ, J.; Procházka, D. Cooperative unmanned aerial system reconnaissance in a complex urban environment and uneven terrain. Sensors 2019, 19, 3754. [Google Scholar] [CrossRef]
- Savkin, A.V.; Verma, S.C.; Ni, W. Autonomous UAV 3D trajectory optimization and transmission scheduling for sensor data collection on uneven terrains. Def. Technol. 2023, 30, 154–160. [Google Scholar] [CrossRef]
- Butzke, J.; Gochev, K.; Holden, B.; Jung, E.J.; Likhachev, M. Planning for a ground-air robotic system with collaborative localization. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 284–291. [Google Scholar]
- Lee, J.K.; Jung, H.; Hu, H.; Kim, D.H. Collaborative control of UAV/UGV. In Proceedings of the 2014 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Kuala Lumpur, Malaysia, 12–15 November 2014; pp. 641–645. [Google Scholar]
- Savkin, A.V.; Huang, H. Navigation of a network of aerial drones for monitoring a frontier of a moving environmental disaster area. IEEE Syst. J. 2020, 14, 4746–4749. [Google Scholar] [CrossRef]
- Nedjati, A.; Vizvari, B.; Izbirak, G. Post-earthquake response by small UAV helicopters. Nat. Hazards 2016, 80, 1669–1688. [Google Scholar] [CrossRef]
- Amici, S.; Turci, M.; Giulietti, F.; Giammanco, S.; Buongiorno, M.; La Spina, A.; Spampinato, L. Volcanic environments monitoring by drones mud volcano case study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 5–10. [Google Scholar] [CrossRef]
- Beni, E.D.; Cantarero, M.; Messina, A. UAVs for volcano monitoring: A new approach applied on an active lava flow on Mt. Etna (Italy), during the 27 February–02 March 2017 eruption. J. Volcanol. Geotherm. Res. 2019, 369, 250–262. [Google Scholar] [CrossRef]
- Bonali, F.L.; Tibaldi, A.; Marchese, F.; Fallati, L.; Russo, E.; Corselli, C.; Savini, A. UAV-based surveying in volcano-tectonics: An example from the Iceland rift. J. Struct. Geol. 2019, 121, 46–64. [Google Scholar] [CrossRef]
- Jordan, B.R. Collecting field data in volcanic landscapes using small UAS (sUAS)/drones. J. Volcanol. Geotherm. Res. 2019, 385, 231–241. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Baylis, S.M.; Mott, R.; Herrod, A.; Clarke, R.H. Precision wildlife monitoring using unmanned aerial vehicles. Sci. Rep. 2016, 6, 22574. [Google Scholar] [CrossRef] [PubMed]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mamm. Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned aerial vehicles (UAVs) and artificial intelligence revolutionizing wildlife monitoring and conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [PubMed]
- Savkin, A.V.; Huang, H. Bioinspired bearing only motion camouflage UAV guidance for covert video surveillance of a moving target. IEEE Syst. J. 2020, 15, 5379–5382. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Li, Z.; Wang, T.; Xu, X.; Zhang, X.; Li, D. Intelligent fish farm—The future of aquaculture. Aquac. Int. 2021, 29, 2681–2711. [Google Scholar] [CrossRef] [PubMed]
- Anggraeni, D.; Udhiarto, A.; Wirawan, A.; Ramadian, A.; Poespawati, N. Development and analysis characteristic solar powered system on LAPAN surveillance UAV 03 (LSU 03). AIP Conf. Proc. 2019, 2088, 030023. [Google Scholar]
- Romeo, G.; Cestino, E.; Borello, F.; Pacino, M. Very-Long Endurance Solar Powered Autonomous UAVs: Role and Constraints for GMEs Applications. In Proceedings of the 28th International Congress of the Aeronautical Sciences–ICAS, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Yang, X.; Pei, X. Hybrid system for powering unmanned aerial vehicles: Demonstration and study cases. In Hybrid Technologies for Power Generation; Elsevier: Amsterdam, The Netherlands, 2022; pp. 439–473. [Google Scholar]
- Colefax, A.P. Developing the Use of Drones for Non-Destructive Shark Management and Beach Safety. Ph.D. Thesis, Southern Cross University, Lismore, NSW, Australia, 2020. [Google Scholar]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Li, K.; Ni, W.; Dressler, F. Continuous maneuver control and data capture scheduling of autonomous drone in wireless sensor networks. IEEE Trans. Mob. Comput. 2021, 21, 2732–2744. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A survey on machine-learning techniques for UAV-based communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory design and power control for multi-UAV assisted wireless networks: A machine learning approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef]
- Makineci, H.B.; Karabörk, H.; Durdu, A. ANN estimation model for photogrammetry-based UAV flight planning optimisation. Int. J. Remote Sens. 2022, 43, 5686–5708. [Google Scholar] [CrossRef]
- Salgado, M.E.; Goodwin, G.C.; Graebe, S.F. Control System Design; Prentice-Hall: Englewood Cliffs, NJ, USA, 2001. [Google Scholar]
- Savkin, A.V.; Evans, R.J. Hybrid Dynamical Systems: Controller and Sensor Switching Problems; Springer Science & Business Media: New York, NY, USA, 2002. [Google Scholar]
- Tao, L.; Zhou, Y.; Zicun, L.; Zhang, X. State of art on energy management strategy for hybrid-powered unmanned aerial vehicle. Chin. J. Aeronaut. 2019, 32, 1488–1503. [Google Scholar]
- Panagiotou, P.; Tsavlidis, I.; Yakinthos, K. Conceptual design of a hybrid solar MALE UAV. Aerosp. Sci. Technol. 2016, 53, 207–219. [Google Scholar] [CrossRef]
- Sekander, S.; Tabassum, H.; Hossain, E. Statistical performance modeling of solar and wind-powered UAV communications. IEEE Trans. Mob. Comput. 2020, 20, 2686–2700. [Google Scholar] [CrossRef]
- Van Nguyen, C.; Van Quyen, T.; Le, A.M.; Truong, L.H.; Nguyen, M.T. Advanced hybrid energy harvesting systems for unmanned aerial vehicles (UAVs). Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 34–39. [Google Scholar] [CrossRef]
- Xu, X.; Zhao, Y.; Tao, L.; Xu, Z. Resource allocation strategy for dual UAVs-assisted MEC system with hybrid solar and RF energy harvesting. In Proceedings of the 2021 3rd International Conference on Computer Communication and the Internet (ICCCI), Nagoya, Japan, 25–27 June 2021; pp. 52–57. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).