
Secure Unmanned Aerial Vehicle Communication in Dual-Function Radar Communication System by Exploiting Constructive Interference



Abstract
1. Introduction
2. System Model
2.1. System Description
2.2. Communication Model
2.3. Radar Model
2.4. Optimization Problem Formulation
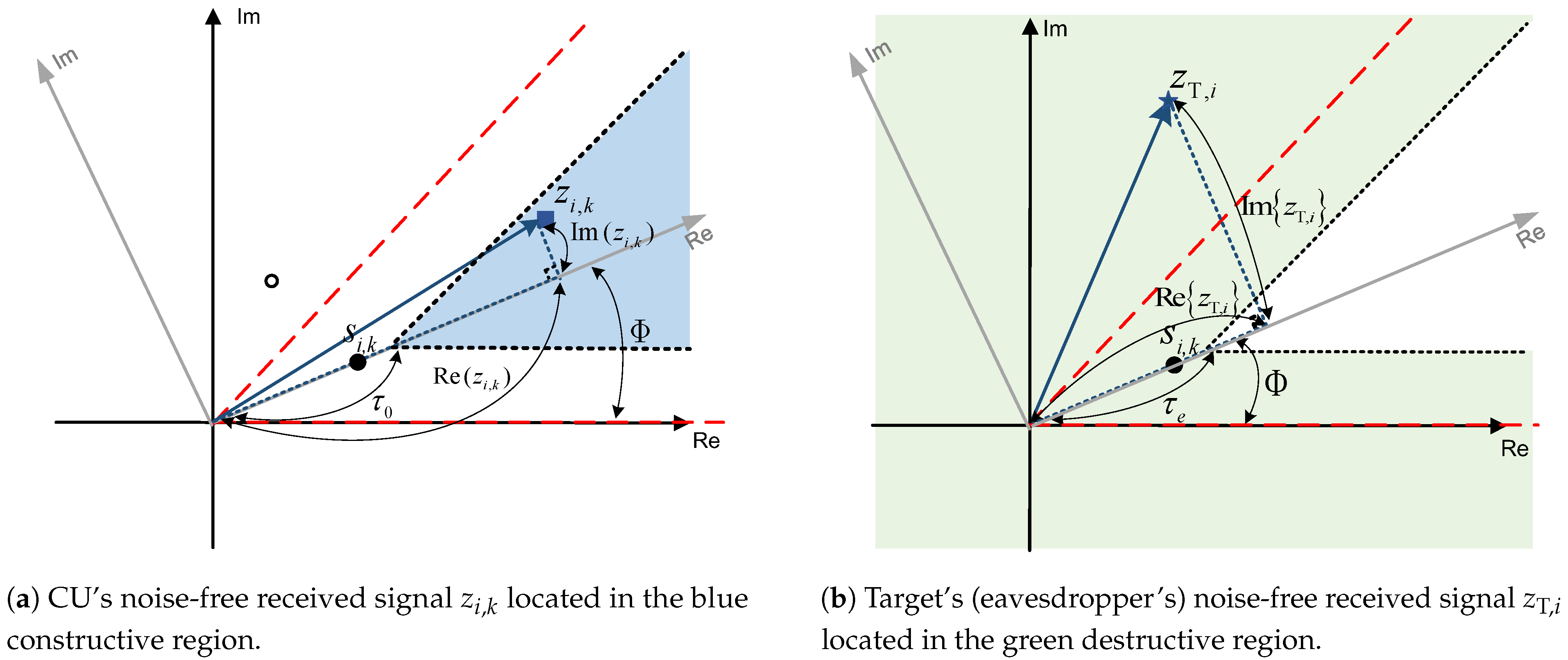
3. Proposed CI-Based Secure Precoding
3.1. Problem Reformulation Based on CI
3.2. Problem-Solving Algorithm
| Algorithm 1 The AO method for solving problem (16). |
|
| Algorithm 2 IFSA method for finding an initial point of problem (16). |
|
4. Traditional Secure Precoding
4.1. Problem Reformulation for Traditional Scheme
4.2. Problem-Solving Algorithm
| Algorithm 3 The AO method for solving problem (33). |
|
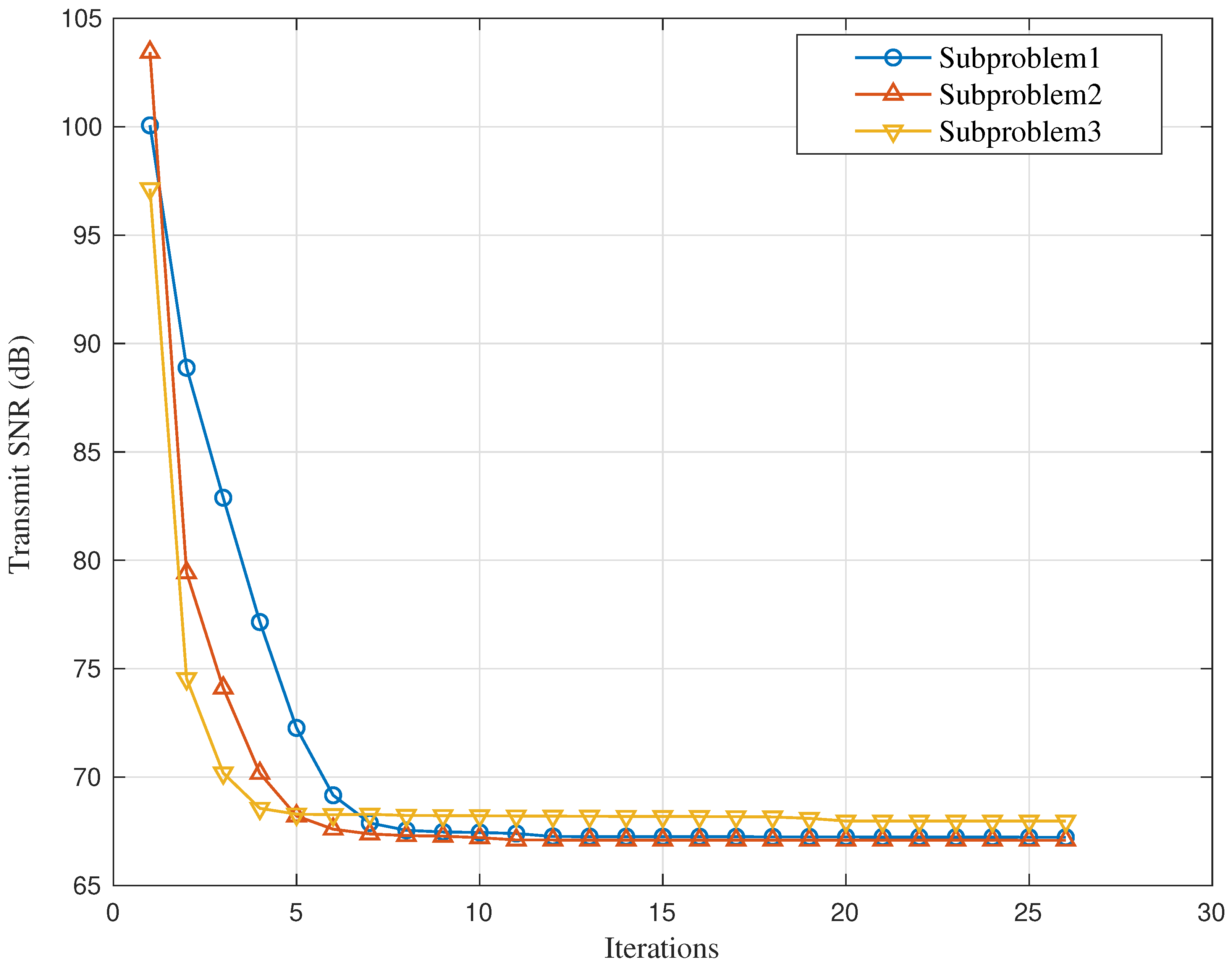
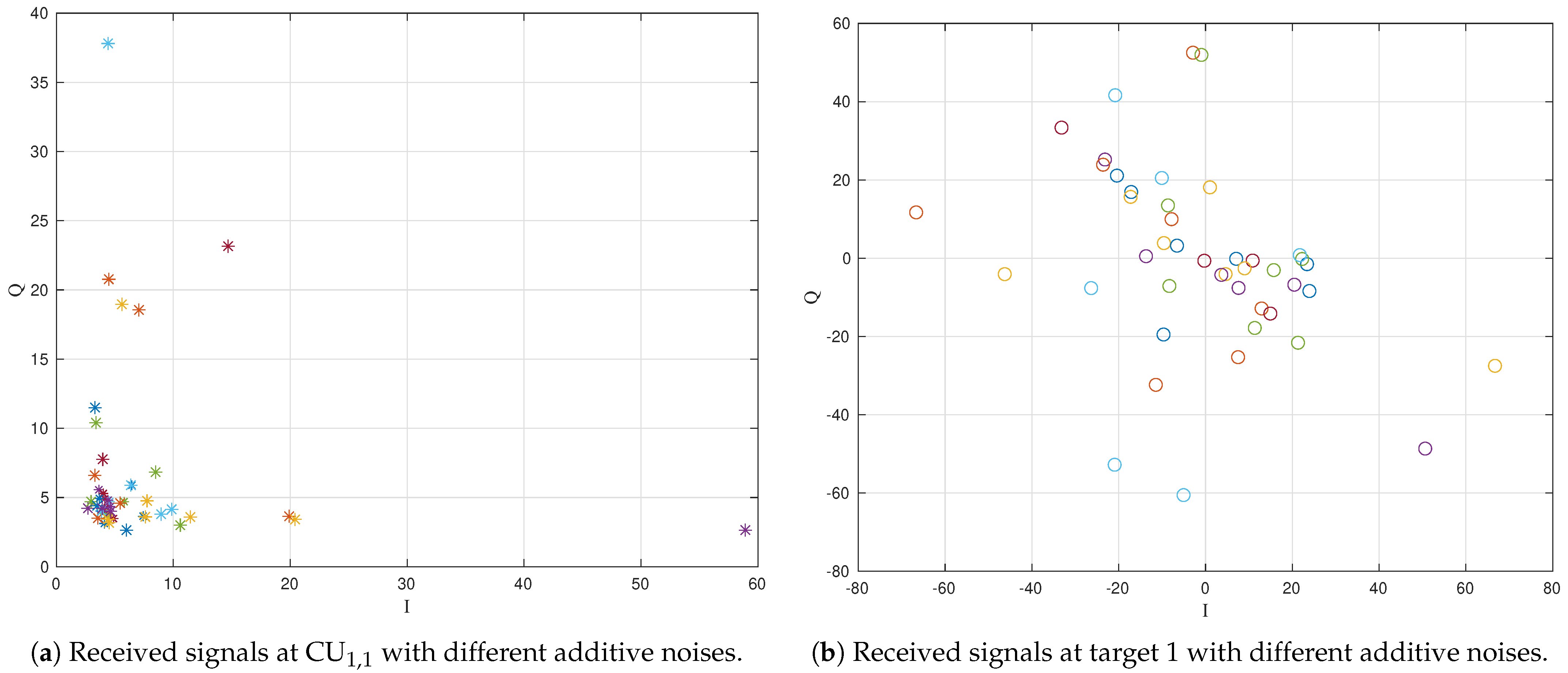
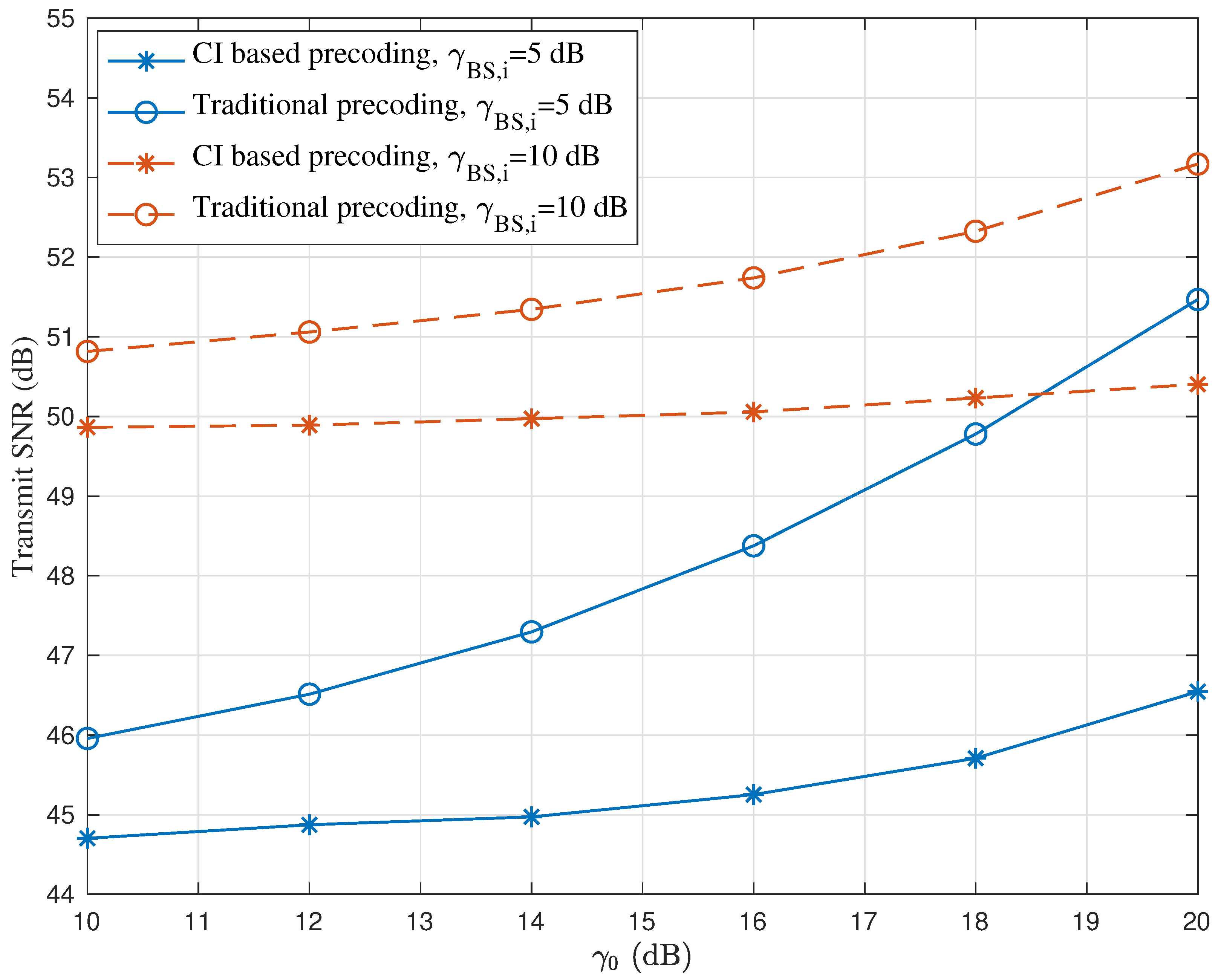
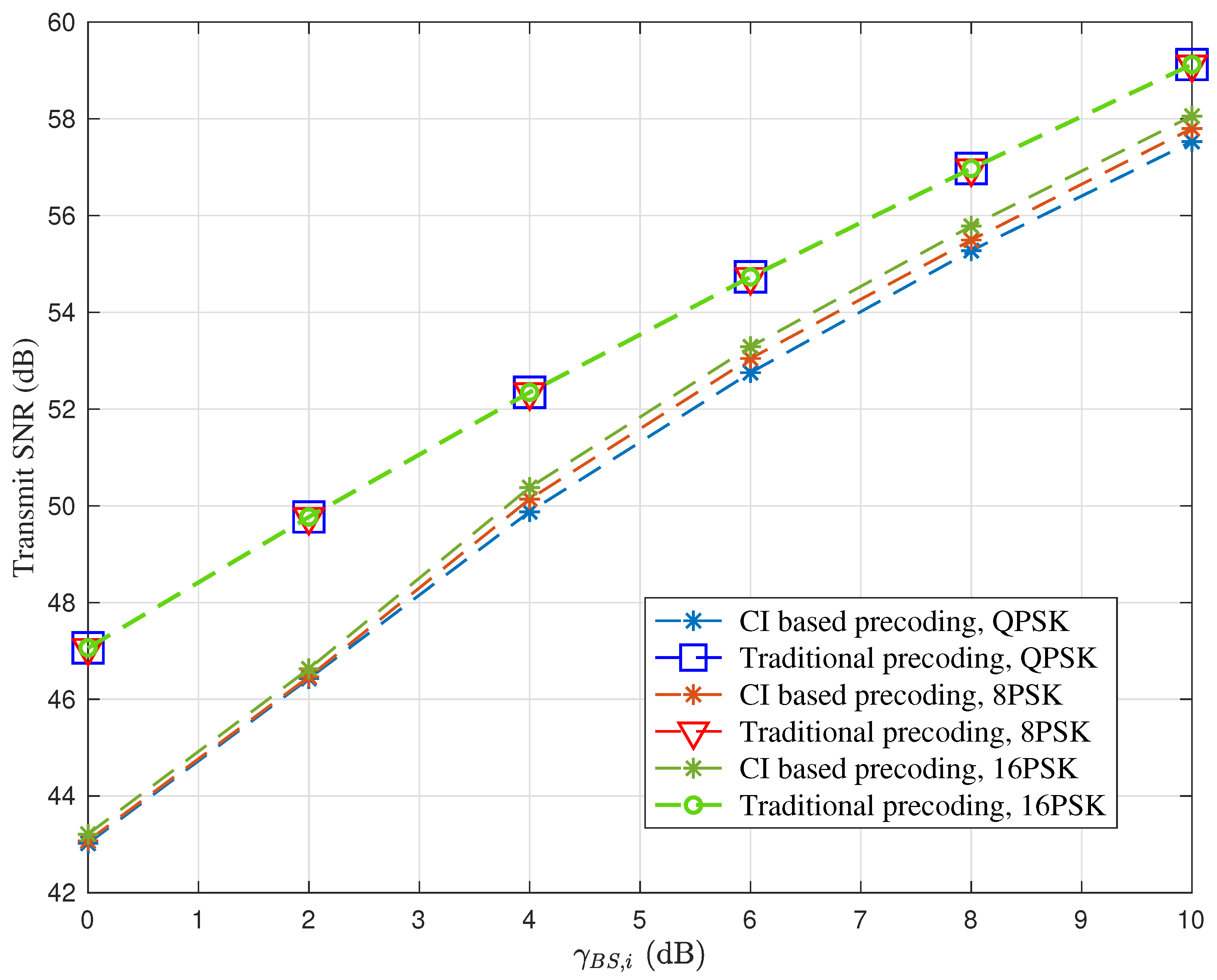
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- 3GPP. Technical Specification Group Radio Access Network: Study on Enhanced LTE Support for Aerial Vehicles (Release 15); Report 36.777; 3GPP: Sophia Antipolis, France, 2017. [Google Scholar]
- Mei, W.; Zhang, R. Cooperative Downlink Interference Transmission and Cancellation for Cellular-Connected UAV: A Divide-and-Conquer Approach. IEEE Trans. Commun. 2020, 68, 1297–1311. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y. Energy Minimization for Cellular-Connected UAV: From Optimization to Deep Reinforcement Learning. IEEE Trans. Wirel. Commun. 2022, 21, 5541–5555. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, J. Performance Analysis of Location-Based Base Station Cooperation for Cellular-Connected UAV Networks. IEEE Trans. Veh. Technol. 2023, 72, 14787–14800. [Google Scholar] [CrossRef]
- Liu, X.; Zhong, W.; Wang, X.; Duan, H.; Fan, Z.; Jin, H.; Huang, Y.; Lin, Z. Deep Reinforcement Learning-Based 3D Trajectory Planning for Cellular Connected UAV. Drones 2024, 8, 199. [Google Scholar] [CrossRef]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine Learning for Wireless Connectivity and Security of Cellular-Connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, Z.; Tong, F.; Sun, P.; Feng, X.; Zhao, Z. Joint Design of Transmitting Waveform and Receiving Filter via Novel Riemannian Idea for DFRC System. Remote Sens. 2023, 15, 3548. [Google Scholar] [CrossRef]
- Tsinos, C.G.; Arora, A.; Chatzinotas, S.; Ottersten, B. Joint Transmit Waveform and Receive Filter Design for Dual-Function Radar-Communication Systems. IEEE J. Sel. Top. Signal Process. 2021, 15, 1378–1392. [Google Scholar] [CrossRef]
- Wen, C.; Huang, Y.; Davidson, T.N. Efficient Transceiver Design for MIMO Dual-Function Radar-Communication Systems. IEEE Trans. Signal Process. 2023, 71, 1786–1801. [Google Scholar] [CrossRef]
- Liao, B.; Xiong, X.; Quan, Z. Robust Beamforming Design for Dual-Function Radar-Communication System. IEEE Trans. Veh. Technol. 2023, 72, 7508–7516. [Google Scholar] [CrossRef]
- Guo, B.; Liang, J.; Wang, T.; So, H.C.; Xu, J. Transmit Hardware Impairment Aware Waveform Design for MIMO DFRC. IEEE Trans. Signal Process. 2024, 72, 2858–2873. [Google Scholar] [CrossRef]
- Guo, B.; Liang, J.; Wang, G.; Tang, B.; So, H.C. Bistatic MIMO DFRC System Waveform Design via Fractional Programming. IEEE Trans. Signal Process. 2023, 71, 1952–1967. [Google Scholar] [CrossRef]
- Wang, D.; Wu, M.; Wei, Z.; Yu, K.; Min, L.; Mumtaz, S. Uplink Secrecy Performance of RIS-Based RF/FSO Three-Dimension Heterogeneous Networks. IEEE Trans. Wirel. Commun. 2024, 23, 1798–1809. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Z.; Yu, K.; Wei, Z.; Zhao, H.; Al-Dhahir, N.; Guizani, M.; Leung, V.C.M. Active Aerial Reconfigurable Intelligent Surface Assisted Secure Communications: Integrating Sensing and Positioning. IEEE J. Sel. Commun. 2024, 42, 2769–2785. [Google Scholar] [CrossRef]
- Yaacoub, E.; Abualsaud, K.; Mahmoud, M. Hybrid Encryption for Securing and Tracking Goods Delivery by Multipurpose Unmanned Aerial Vehicles in Rural Areas Using Cipher Block Chaining and Physical Layer Security. Drones 2024, 8, 111. [Google Scholar] [CrossRef]
- Wang, D.; Wu, M.; He, Y.; Pang, L.; Xu, Q.; Zhang, R. An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks. Remote Sens. 2022, 14, 4501. [Google Scholar] [CrossRef]
- Yerrapragada, A.K.; Eisman, T.; Kelley, B. Physical Layer Security for Beyond 5G: Ultra Secure Low Latency Communications. IEEE Open J. Comm. Soc. 2021, 2, 2232–2242. [Google Scholar] [CrossRef]
- Mitev, M.; Chorti, A.; Poor, H.V.; Fettweis, G.P. What Physical Layer Security Can Do for 6G Security. IEEE Open J. Veh. Technol. 2023, 4, 375–388. [Google Scholar] [CrossRef]
- Chorti, A.; Barreto, A.N.; Köpsell, S.; Zoli, M.; Chafii, M.; Sehier, P.; Fettweis, G.; Poor, H.V. Context-Aware Security for 6G Wireless: The Role of Physical Layer Security. IEEE Comm. Stand. Mag. 2022, 6, 102–108. [Google Scholar] [CrossRef]
- Wang, D.; Wu, M.; Chakraborty, C.; Min, L.; He, Y.; Guduri, M. Covert Communications in Air-ground Integrated Urban Sensing Networks Enhanced by Federated Learning. IEEE Sens. J. 2024, 24, 5636–5643. [Google Scholar] [CrossRef]
- Li, M.; Ti, G.; Liu, Q. Secure Beamformer Designs in MU-MIMO Systems With Multiuser Interference Exploitation. IEEE Trans. Veh. Technol. 2018, 67, 8288–8301. [Google Scholar] [CrossRef]
- Liang, L.; Li, X.; Huang, H.; Yin, Z.; Zhang, N.; Zhang, D. Securing Multidestination Transmissions With Relay and Friendly Interference Collaboration. IEEE Internet Things J. 2024, 11, 18782–18795. [Google Scholar] [CrossRef]
- Li, B.; Yang, Z.; Zou, Y.; Zhu, J.; Cao, W.; Shi, C. Securing Multiuser Communications via an Energy Harvesting Node: Jammer or Relay? IEEE Trans. Veh. Technol. 2023, 72, 8755–8769. [Google Scholar] [CrossRef]
- Lin, Y.; Shu, F.; Zheng, Y.; Liu, J.; Dong, R.; Chen, X.; Wu, Y.; Yan, S.; Wang, J. Two Low-Complexity Efficient Beamformers for an IRS- and UAV-Aided Directional Modulation Network. Drones 2023, 7, 489. [Google Scholar] [CrossRef]
- Min, L.; Li, J.; He, Y.; Si, Q. LAP and IRS Enhanced Secure Transmissions for 6G-Oriented Vehicular IoT Services. Drones 2023, 7, 414. [Google Scholar] [CrossRef]
- Tang, Z.; Sun, L.; Tian, X.; Niyato, D.; Zhang, Y. Artificial-Noise-Aided Coordinated Secure Transmission Design in Multi-Cell Multi-Antenna Networks With Limited Feedback. IEEE Trans. Veh. Technol. 2022, 71, 1750–1765. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Long, K. Joint Resource, Trajectory, and Artificial Noise Optimization in Secure Driven 3-D UAVs With NOMA and Imperfect CSI. IEEE J. Sel. Commun. 2021, 39, 3363–3377. [Google Scholar] [CrossRef]
- Salem, A.A.; Ismail, M.H.; Ibrahim, A.S. Active Reconfigurable Intelligent Surface-Assisted MISO Integrated Sensing and Communication Systems for Secure Operation. IEEE Trans. Veh. Technol. 2023, 72, 4919–4931. [Google Scholar] [CrossRef]
- Yu, X.; Xu, J.; Zhao, N.; Wang, X.; Niyato, D. Security Enhancement of ISAC via IRS-UAV. IEEE Trans. Wirel. Commun. 2024, 23, 15601–15612. [Google Scholar] [CrossRef]
- Xu, J.; Yu, X.; Xu, L.; Xing, C.; Zhao, N.; Wang, X.; Niyato, D. IRS-UAV Assisted Secure Integrated Sensing and Communication. IEEE Wirel. Commun. 2024, 31, 61–67. [Google Scholar] [CrossRef]
- Masouros, C.; Zheng, G. Exploiting Known Interference as Green Signal Power for Downlink Beamforming Optimization. IEEE Trans. Signal Process. 2015, 63, 3628–3640. [Google Scholar] [CrossRef]
- Li, A.; Spano, D.; Krivochiza, J.; Domouchtsidis, S.; Tsinos, C.G. A Tutorial on Interference Exploitation via Symbol-Level Precoding: Overview, State-of-the-Art and Future Directions. IEEE Commun. Surv. Tuts. 2020, 22, 796–839. [Google Scholar] [CrossRef]
- Wang, W.; Duan, L.; Liu, X.; Zhao, N. Enhancing MISO-NOMA Networks via Constructive Interference Precoding. IEEE Trans. Commun. 2024, 72, 510–523. [Google Scholar] [CrossRef]
- Gu, B.; Li, D.; Liu, Y.; Xu, Y. Exploiting Constructive Interference for Backscatter Communication Systems. IEEE Trans. Commun. 2023, 71, 4344–4359. [Google Scholar] [CrossRef]
- Pu, Z.; Wang, W.; Dong, F. Beamforming and Waveform Designing for Spectrum Coexistence System Based on Constructive Interference. IEEE Commun. Lett. 2022, 26, 2695–2699. [Google Scholar] [CrossRef]
- Pu, Z.; Wang, W.; Yan, Y.; Shao, X. Multi-User Interference Exploiting and Waveform Designing With PAPR Constraint for Radar and Communication Coexistence System. IEEE Commun. Lett. 2023, 27, 3048–3052. [Google Scholar] [CrossRef]
- Lei, Z.; Liao, X.; Gao, Z.; Li, A. CI-NN: A Model-Driven Deep Learning-Based Constructive Interference Precoding Scheme. IEEE Commun. Lett. 2021, 25, 1896–1900. [Google Scholar] [CrossRef]
- Liu, R.; Li, M.; Liu, Q.; Swindlehurst, A.L. Secure Symbol-Level Precoding in MU-MISO Wiretap Systems. IEEE Trans. Inf. Forensics Secur. 2020, 15, 3359–3373. [Google Scholar] [CrossRef]
- Xu, Q.; Ren, P.; Swindlehurst, A.L. Rethinking Secure Precoding via Interference Exploitation: A Smart Eavesdropper Perspective. IEEE Trans. Inf. Forensics Secur. 2021, 16, 585–600. [Google Scholar] [CrossRef]
- Salem, A.; Masouros, C.; Wong, K.-K. On the Secrecy Performance of Interference Exploitation With PSK: A Non-Gaussian Signaling Analysis. IEEE Trans. Wirel. Commun. 2021, 20, 7100–7117. [Google Scholar] [CrossRef]
- Su, N.; Liu, F.; Wei, Z.; Liu, Y.-F.; Masouros, C. Secure Dual-Functional Radar-Communication Transmission: Exploiting Interference for Resilience Against Target Eavesdropping. IEEE Trans. Wirel. Commun. 2022, 21, 7238–7252. [Google Scholar] [CrossRef]
- Wang, B.; Wu, L.; Cheng, Z.; He, Z. Exploiting Constructive Interference in Symbol Level Hybrid Beamforming for Dual-Function Radar-Communication System. IEEE Wireless Commun. Lett. 2022, 11, 2071–2075. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, M. Joint Transmit Beamforming and Receive Filters Design for Coordinated Two-Cell Interfering Dual-Functional Radar-Communication Networks. IEEE Trans. Veh. Technol. 2022, 71, 12362–12367. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: MATLAB Software for Disciplined Convex Programming, Version 2.1. Available online: http://cvxr.com/cvx (accessed on 9 October 2024).
- Cheng, Y.; Pesavento, M. Joint Optimization of Source Power Allocation and Distributed Relay Beamforming in Multiuser Peer-to-Peer Relay Networks. IEEE Trans. Signal Process. 2012, 60, 2962–2973. [Google Scholar] [CrossRef]
- Khandaker, M.R.A.; Masouros, C.; Wong, K.-K. Constructive Interference Based Secure Precoding: A New Dimension in Physical Layer Security. IEEE Trans. Inf. Forensics Secur. 2018, 13, 2256–2268. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, Q. Secure Beamforming Design for UAV-Empowered Integrated Sensing and Communication. Appl. Sci. 2024, 14, 7196. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | Explanations |
|---|---|
| AN | Artificial noise |
| AO | Alternative optimization |
| BS | Base station |
| CI | Constructive interference |
| CSI | Channel state information |
| CU | Cellular user |
| DFRC | Dual-functional radar communication |
| IFSA | Iterative feasibility search algorithm |
| MIMO | Multiple-input multiple-output |
| PAPR | Peak-to-average-power ratio |
| PLS | Physical layer security |
| PSK | Phase-shift keying |
| QAM | Quadrature amplitude modulation |
| QoS | Quality of service |
| SER | Symbol error rate |
| SINR | Signal-to-interference-plus-noise ratio |
| SNR | Signal-to-noise ratio |
| UAV | Unmanned aerial vehicle |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Q.; Yi, J.; Wang, X.; Niu, M.-b.; Miah, M.S.; Wang, L. Secure Unmanned Aerial Vehicle Communication in Dual-Function Radar Communication System by Exploiting Constructive Interference. Drones 2024, 8, 581. https://doi.org/10.3390/drones8100581
Xu Q, Yi J, Wang X, Niu M-b, Miah MS, Wang L. Secure Unmanned Aerial Vehicle Communication in Dual-Function Radar Communication System by Exploiting Constructive Interference. Drones. 2024; 8(10):581. https://doi.org/10.3390/drones8100581
Chicago/Turabian StyleXu, Qian, Jia Yi, Xianyu Wang, Ming-bo Niu, Md. Sipon Miah, and Ling Wang. 2024. "Secure Unmanned Aerial Vehicle Communication in Dual-Function Radar Communication System by Exploiting Constructive Interference" Drones 8, no. 10: 581. https://doi.org/10.3390/drones8100581
APA StyleXu, Q., Yi, J., Wang, X., Niu, M.-b., Miah, M. S., & Wang, L. (2024). Secure Unmanned Aerial Vehicle Communication in Dual-Function Radar Communication System by Exploiting Constructive Interference. Drones, 8(10), 581. https://doi.org/10.3390/drones8100581