
U-Space Social and Environmental Performance Indicators

 , , , , and
, , , , and 
Abstract
1. Introduction
2. UAM Impacts on Citizens’ Quality of Life and Their Assessment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nature of Impact | No. of Publications | Qualitative Assessment | Quantitative Assessment | Review Paper | Discussion Paper |
|---|---|---|---|---|---|
| Social acceptance | 39 | [1,12,13,14,16,22,24,26,30,31,32,34,38,39,40,42,44] | [8,33,35,36,41,43] | [6,7,9,15,17,18,19,20,21,23,25,27,28,29,37,43] | |
| Noise | 32 | [1,5,6,12,14,24,34,38,39,42,45,55,61] | [5,6,24,37,45,46,47,50,55,56,57,58,61] | [49,52,54,60,62] | [17,21,23,48,51,53,59] |
| Visual pollution | 12 | [1,5,14,24,34,42,61,63] | [5,24,37,61,63] | [17,19,23] | |
| Privacy concerns | 12 | [1,5,12,14,24,34,65] | [5,37] | [64] | [17,19,23] |
| Access and equity | 8 | [5,14,38] | [5,24,37] | [19,24,25,59] | |
| Economic aspects | 7 | [5,16,24,34] | [5,66] | [35] | [59] |
| Emissions | 6 | [5] | [5,37,66,67] | [19,59] | |
| Other (environment, safety, security, costs, trust, wildlife, efficiency, etc.) | 26 | [1,5,12,14,16,24,34,38,39] | [5,24,37,56,61,66,69] | [35,64,68,70,71] | [15,17,19,21,23,25,59] |
3. U-Space Social and Environmental Performance Framework
3.1. Focus Areas and Cross-Cutting Areas
- Noise (NO),
- Visual pollution (VP),
- Privacy concerns (PC),
- Access and equity (AE),
- Economic aspects (EC),
- Emissions (EM),
- Wildlife (WL),
- Public safety (PS).
3.2. Performance Indicators
3.2.1. Noise
- The interaction between noise levels, time of exposure, and exposed people’s “acceptance” of the given noise could be considered in order to obtain acceptance thresholds (e.g., low noise levels may be accepted by more people during longer periods and high noise levels only during short periods).
- Furthermore, the noise indicators should include the notion of human annoyance and not only be based on acoustic, objectively measurable, metrics. In order to do so, noise annoyance curves are needed to indicate the relationship between objective noise levels (integrated and/or event-based) and an annoyance measure (such as the number of highly annoyed people, for example). The creation of these curves is, however, very localization-dependent and requires multiple studies with field surveys and laboratory listening tests to hopefully yield realistic numbers.
- Sharp changes in noise level (when the drone noise exceeds a predefined acceptable level) can have a greater impact on noise perception than exposure to a constant level of noise).
- Most noise indicators refer to outdoor noise levels. Sound insulation could result in the fact that people indoors are exposed to only a fraction of the outdoor sound, and the thresholds could differ from the outdoor ones.
- The correlation of noise, visual pollution, and privacy should also be addressed.
3.2.2. Visual Pollution
- An initial acceptable visual pollution threshold should be established; even the acceptable level will change over time (people’s reaction will probably change after the “novelty” aspect fades away). Virtual reality simulation is also (besides surveys and interviews) one of the possibilities to determine the threshold, i.e., acceptable level of visual pollution.
- The “visible area” should be clearly defined, whether it considers only the visible area of the sky or buildings as well. Since visual pollution is a relatively new field of study, there is a need to measure and collect more data to be able to make reliable predictions of the impact of UAM visual pollution for different geographical areas with different demographic and socio-economic population profiles.
- The relation between visual pollution and privacy concerns should be investigated.
3.2.3. Privacy Concerns
3.2.4. Access and Equity
3.2.5. Emissions
3.2.6. Other Areas of UAM Impact
Economic Aspects
Public Safety
Wildlife
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Definition and Measurement Mechanisms for Performance Indicators
A.1. Noise-Related Indicators
A.1.1. NO-1: Area-Based People’s Exposure to Noise (LAeq)
A.1.2. NO-2: Area-Based People’s Exposure to Day–Evening–Night Noise Level (Lden)
A.1.3. NO-3: Trajectory-Based People’s Exposure to Noise (LAE)
A.1.4. NO-4: Area-Based Person–Event Index
A.1.5. NO-5: Duration of Area-Based People’s Exposure to Noise
A.1.6. NO-6: Area-Based People’s Exposure to Event Emergence
A.1.7. NO-7: Area-Based Intermittent Exposure to Noise
A.2. Visual Pollution-Related Indicators
A.2.1. VP-1: Trajectory-Based People Exposed
- Calculate the area from where the drone is visible at discretized time intervals.
- Filter the population present in the affected area in the same interval.
- Count the number of people seeing the drone for the first time.
A.2.2. VP-2: Trajectory-Based People Exposed by Concentration Threshold
- Calculate the VPC in the area from where the drone is visible at discretized time intervals (the contours of the VPC threshold define the new affected area delimitation for each time discretization).
- Filter the people present in the affected area at the same interval.
- Count the number of people who have been exposed to a VPC exceeding the defined threshold.
A.2.3. VP-3: Trajectory-Based People Exposed by Temporal and Concentration Threshold
- Calculate the VPC in the area from where the drone is visible at discretized time intervals (contours of the VPC threshold define the new affected area delimitation for each time discretization).
- Filter the population present in the affected area in the same interval.
- Count the number of people who have been exposed to a VPC exceeding the defined threshold during a period of time exceeding the defined time period.
A.2.4. VP-4: Trajectory-Based Visual Exposure
A.2.5. VP-5: Area-Based People Exposed
A.2.6. VP-6: Area-Based People Exposed by Concentration Threshold
A.2.7. VP-7: Area-Based People Exposed by Temporal and Concentration Threshold
A.2.8. VP-8: Area-Based Visual Exposure
A.2.9. VP-9: Visual Exposure Per Kilometer
A.3. Privacy Concern-Related Indicators
A.3.1. PC-1: Trajectory-Based Visually Annoyed People
| Type of Area | %A | %HA |
|---|---|---|
| Commercial | 30 | 20 |
| Industrial | 60 | 40 |
| Residential | 80 | 60 |
A.3.2. PC-2: Trajectory-Based People Exposed to Hovering Drones
A.3.3. PC-3: Area-Based Visually Annoyed People
A.3.4. PC-4: Area-Based People Exposed to Hovering Drones
A.3.5. PC-5: Area-Based Duration of Different Visual Exposure to Hovering Drones
A.4. Access and Equity-Related Indicators
A.4.1. AE-1: Deliveries of Goods to Areas with Limited or No Transport Connections
A.4.2. AE-2: Reduced Travel Time for Healthcare-Related Deliveries
A.4.3. AE-3: Deviation of Noise Exposure from Mean Value
A.4.4. AE-4: Deviation of Visual Pollution Exposure from Mean Value
A.5. Emissions-Related Indicators
A.5.1. EM-1: Actual Average CO2 Emission Per Flight
A.5.2. EM-2: Trajectory-Based Energy Consumption
A.5.3. EM-3: Trajectory-Based CO2-eq Emissions
A.5.4. EM-4: Area-Based CO2-eq Emissions
A.5.5. EM-5: Area-Based CO2-eq Emissions Decrease
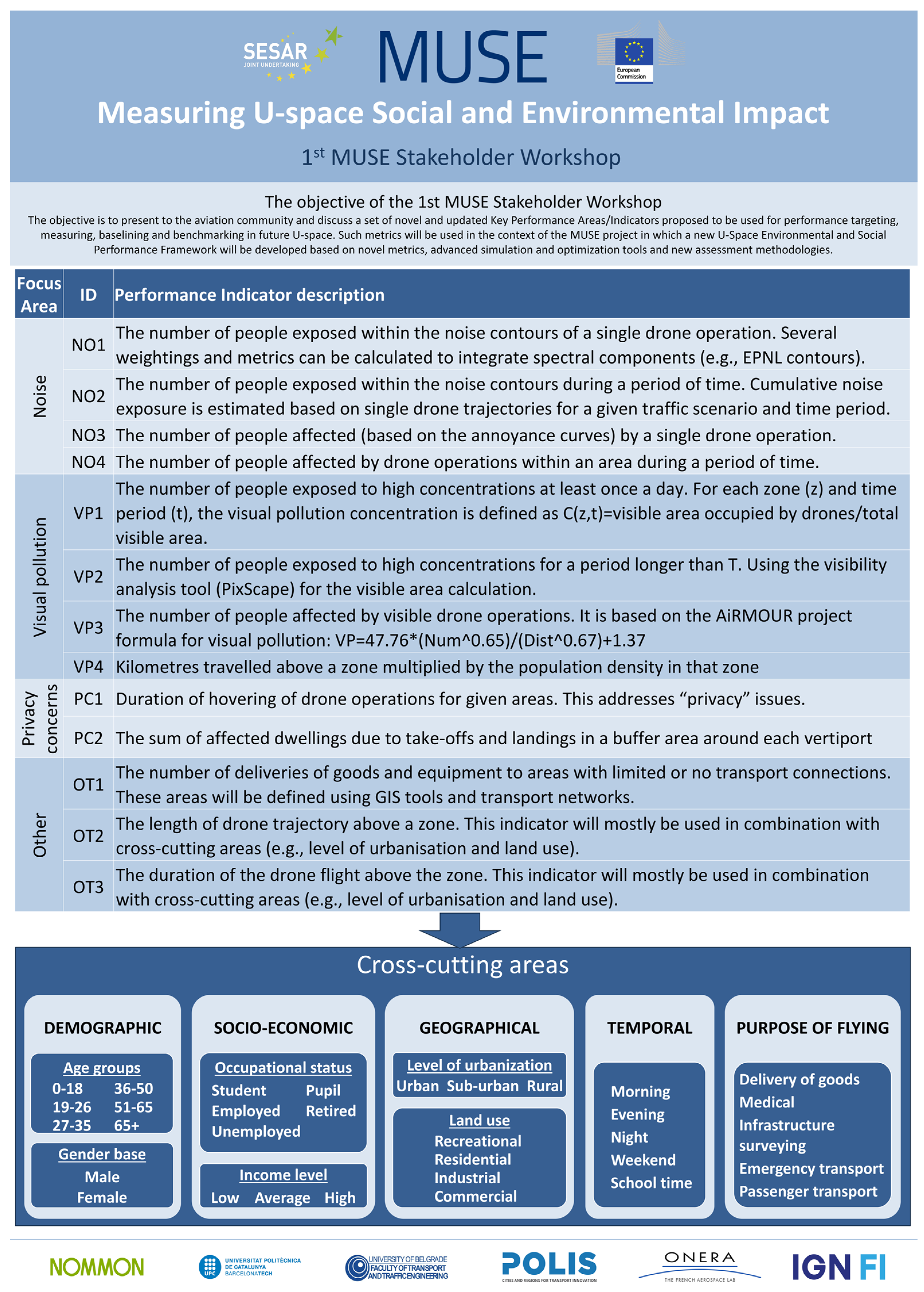
Appendix B. The 1st MUSE Stakeholder Workshop Poster
Appendix C. Questionnaire for the Workshop Participants

References
- EASA. Study on the Societal Acceptance of Urban Air Mobility in Europe; EASA: Cologne, Germany, 2021.
- The WHOQOL Group. The World Health Organization quality of life assessment (WHOQOL): Position paper from the World Health Organization. Soc. Sci. Med. 1995, 41, 1403–1409. [Google Scholar] [CrossRef] [PubMed]
- OECD. Executive summary. In How’s Life? 2020: Measuring Well-Being; OECD Publishing: Paris, France, 2020. [Google Scholar]
- World Health Organization. Programme on Mental Health: WHOQOL User Manual; WHO/HIS/HSI Rev. 2012.03; World Health Organization: Geneva, Switzerland, 1998. [Google Scholar]
- Al Haddad, C.; Fu, M.; Straubinger, A.; Plötner, K.; Antoniou, C. Choosing Suitable Indicators for the Assessment of Urban Air Mobility: A Case Study of Upper Bavaria, Germany. Eur. J. Transp. Infrastruct. Res. 2020, 20, 214–232. [Google Scholar] [CrossRef]
- Ivošević, J.; Ganić, E.; Petošić, A.; Radišić, T. Comparative UAV Noise-Impact Assessments through Survey and Noise Measurements. Int. J. Environ. Res. Public Health 2021, 18, 6202. [Google Scholar] [CrossRef] [PubMed]
- UIC2—UAM Initiative Cities Community/EU’s Smart Cities Marketplace. Urban Air Mobility and Sustainable Urban Mobility Planning—Practitioner Briefing. 2021. Available online: https://civitas.eu/sites/default/files/practitioner_briefing_urban_air_mobility_and_sump.pdf (accessed on 20 September 2024).
- Wang, N.; Mutzner, N.; Blanc het, K. Societal acceptance of urban drones: A scoping literature review. Technol. Soc. 2023, 75, 102377. [Google Scholar] [CrossRef]
- Price, G.; Helton, D.; Jenkins, K.; Kvicala, M.; Parker, S.; Wolfe, R. Urban Air Mobility Operational Concept (OpsCon) Passenger-Carrying Operations. NASA/CR—2020–5001587. 2020. Available online: https://ntrs.nasa.gov/api/citations/20205001587/downloads/UAM%20Passenger-carrying%20OpsCon%20-%20v14%20GP%20accept.pdf (accessed on 20 September 2024).
- Eurofound. European Quality of Life Survey 2016: Quality of Life, Quality of Public Services, and Quality of Society; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- EUROSTAT. Quality of Life. Information on Data. Available online: https://ec.europa.eu/eurostat/web/quality-of-life/information-data (accessed on 1 December 2023).
- Lidynia, C.; Philipsen, R.; Ziefle, M. Droning on about drones—Acceptance of and perceived barriers to drones in civil usage contexts. In Advances in Human Factors in Robots and Unmanned Systems, Proceedings of the AHFE 2016 International Conference on Human Factors in Robots and Unmanned Systems, Walt Disney World, FL, USA, 27–31 July 2016; Springer: Berlin/Heidelberg, Germany, 2017; pp. 317–329. [Google Scholar] [CrossRef]
- Goyal, R.; Reiche, C.; Fernando, C.; Serrao, J.; Kimmel, S.; Cohen, A.; Shaheen, S. Urban Air Mobility (UAM) Market Study. HQ-E-DAA-TN65181. 2018. Available online: https://ntrs.nasa.gov/api/citations/20190000519/downloads/20190000519.pdf (accessed on 20 September 2024).
- Yedavalli, P.; Mooberry, J. An Assessment of Public Perception of Urban Air Mobility (UAM). Airbus. 2019. Available online: https://www.airbus.com/sites/g/files/jlcbta136/files/2022-07/Airbus-UTM-public-perception-study%20-urban-air-mobility.pdf (accessed on 20 September 2024).
- CORUS Consortium. U-Space Concept of Operations, Deliverable D6.3, H2020-SESAR-2016-1, Grant 763551. 25 October 2019. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5c8b46d99&appId=PPGMS (accessed on 20 September 2024).
- Macias, M.; Barrado, C.; Pastor, E.; Royo, P. The future of drones and their public acceptance. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–8. [Google Scholar]
- Kraus, J.; Kleczatský, A.; Hulínská, Š. Social, technological, and systemic issues of spreading the use of drones. Transp. Res. Procedia 2020, 51, 3–10. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The determinants behind the acceptance of autonomous vehicles: A systematic review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef]
- Prichard, M.; Rinsler, D.J.; Moore, M.; Turner, N.; Villa, I.; Nathan, A.; Hamadi, Y. Uber Air: Designing for the Community; Uber Elevate. 2020. Available online: https://canadianaam.com/wp-content/uploads/2021/05/Uber-Air-Designing-for-the-Community.pdf (accessed on 20 September 2024).
- Community Air Mobility Initiative (CAMI). Components of Public Acceptance for AAM and UAM; Community Air Mobility Initiative (CAMI): Bainbridge, WA, USA, 2020. [Google Scholar]
- Deloitte Consulting LLP. UAM Vision Concept of Operations (ConOps) UAM Maturity Level (UML) 4; Deloitte Consulting LLP: Philadelphia, PA, USA, 2020. [Google Scholar]
- Tan, L.K.L.; Lim, B.C.; Park, G.; Low, K.H.; Yeo, V.C.S. Public acceptance of drone applications in a highly urbanized environment. Technol. Soc. 2021, 64, 101462. [Google Scholar] [CrossRef]
- UK CAA. Advanced Air Mobility: Taking a Use Case Approach. CAP2122; UK CAA: Crawley, UK, 2021. [Google Scholar]
- DACUS Consortium. Performance Framework, Deliverable D5.3, H2020-SESAR-2019-2, Grant 893864. 10 November 2021. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5e4b320aa&appId=PPGMS (accessed on 20 September 2024).
- Wisk Aero LLC. Building Social Acceptance for Advanced Air Mobility—Key Learnings and Insights from Years of Local Engagement; Wisk Aero LLC: Mountain View, CA, USA, 2021. [Google Scholar]
- Keller, M.; Hulinská, Š.; Kraus, J. Integration of UAM into cities–the public view. Transp. Res. Procedia 2021, 59, 137–143. [Google Scholar] [CrossRef]
- ASSURED-UAM Consortium. Urban Mobility Integration Strategies. Deliverable D1.3, H2020-MG-2020-SingleStage-INEA, Grant 101006696. 6 May 2021. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5dccbb000&appId=PPGMS (accessed on 20 September 2024).
- ASSURED-UAM Consortium. Financing and Public Acceptance. Deliverable D2.4, H2020-MG-2020-SingleStage-INEA, Grant 101006696. 30 November 2021. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5e565e9d0&appId=PPGMS (accessed on 20 September 2024).
- Vertical Aerospace. The Future of Advanced Aerial Mobility; Vertical Aerospace: Bristol, UK, 2021. [Google Scholar]
- Park, S.W. Social Acceptability of Urban Air Mobility by Aircraft Category and Autonomous Phases; KDI School of Public Policy and Management: Sejong-si, Republic of Korea, 2021. [Google Scholar]
- USpace4UAM Consortium. Report on Public Acceptance Studies. Deliverable D4.3, H2020-SESAR-2020-1, Grant 101017643. 15 December 2022. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5f538becf&appId=PPGMS (accessed on 20 September 2024).
- TindAIR Consortium. Social Acceptance Assessment Report. Deliverable D5.4, H2020-SESAR-2020-1, Grant 101017677. 18 November 2022. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5f596885d&appId=PPGMS (accessed on 20 September 2024).
- Smith, A.; Dickinson, J.E.; Marsden, G.; Cherrett, T.; Oakey, A.; Grote, M. Public acceptance of the use of drones for logistics: The state of play and moving towards more informed debate. Technol. Soc. 2022, 68, 101883. [Google Scholar] [CrossRef]
- AiRMOUR Consortium. Public and Stakeholder Acceptance—Interim Report. Deliverable D4.1, H2020-MG-2018-2019-2020, Grant 101006601. 29 June 2022. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5ee219c32&appId=PPGMS (accessed on 20 September 2024).
- Çetin, E.; Cano, A.; Deransy, R.; Tres, S.; Barrado, C. Implementing mitigations for improving societal acceptance of urban air mobility. Drones 2022, 6, 28. [Google Scholar] [CrossRef]
- Biehle, T. Social sustainable urban air mobility in Europe. Sustainability 2022, 14, 9312. [Google Scholar] [CrossRef]
- PJ19-W2 CI Consortium. DES Performance Framework—U-space Companion Document. Deliverable D4.7, H2020-SESAR-2019-1, Grant 874473. 3 April 2023. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5faa899d0&appId=PPGMS (accessed on 20 September 2024).
- Silva, A.T.; Duarte, S.P.; Melo, S.; Witkowska-Konieczny, A.; Giannuzzi, M.; Lobo, A. Attitudes towards Urban Air Mobility for E-Commerce Deliveries: An Exploratory Survey Comparing European Regions. Aerospace 2023, 10, 536. [Google Scholar] [CrossRef]
- Kellermann, R.; Biehle, T.; Mostofi, H. Modelling public attitude towards drone delivery in Germany. Eur. Transp. Res. Rev. 2023, 15, 38. [Google Scholar] [CrossRef]
- Melo, S.; Silva, F.; Abbasi, M.; Ahani, P.; Macedo, J. Public Acceptance of the Use of Drones in City Logistics: A Citizen-Centric Perspective. Sustainability 2023, 15, 2621. [Google Scholar] [CrossRef]
- Lotz, V.; Kirste, A.; Lidynia, C.; Stumpf, E.; Ziefle, M. User Acceptance of Urban Air Mobility (UAM) for Passenger Transport: A Choice-Based Conjoint Study. In Proceedings of the International Conference on Human-Computer Interaction, Copenhagen, Denmark, 23–28 July 2023; pp. 296–315. [Google Scholar]
- Stolz, M.; Laudien, T. Assessing Social Acceptance of Urban Air Mobility using Virtual Reality. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–9. [Google Scholar]
- Chiacchiera, A.; Raper, D.; Elliff, T.; Agouridas, V. Urban Air Mobility and Sustainable Development—White Paper; Aerospace, Security and Defence Industries Association of Europe (ASD) and Envisa: 2023. Available online: https://umbraco.asd-europe.org/media/wdjpbxrf/asd-urban-air-mobility-white-paper-january-2023.pdf (accessed on 20 September 2024).
- Park, G.; Park, H.; Park, H.; Chun, N.; Kim, S.-H.; Lee, K. Public Perception of UAM: Are we ready for the new mobility that we have dreamed of? In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Atlanta, GA, USA, 10–14 October 2022; Volume 66, pp. 40–44. [Google Scholar]
- The National Academies Press. National Academies of Sciences Engineering and Medicine, Assessing Community Annoyance of Helicopter Noise; The National Academies Press: Washington, DC, USA, 2017. [Google Scholar]
- Bulusu, V.; Polishchuk, V.; Sedov, L. Noise Estimation for Future Large-Scale Small UAS Operations. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, NoiseCon17, Grand Rapids, MI, USA, 12–14 June 2017; Volume 255, pp. 864–871. Available online: https://www.ingentaconnect.com/contentone/ince/incecp/2017/00000254/00000002/art00106 (accessed on 20 September 2024).
- Casalino, D.; van der Velden, W.C.; Romani, G. Community noise of urban air transportation vehicles. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1834. [Google Scholar]
- Eißfeldt, H. Supporting urban air mobility with citizen participatory noise sensing: A concept. In Companion, Proceedings of the 2019 World Wide Web Conference, San Francisco, CA, USA, 13–17 May 2019; ACM: New York, NY, USA, 2019; pp. 93–95. [Google Scholar]
- Martinez, A.J.T. Drone Noise: A New Public Health Challenge in Urban Areas. In Proceedings of the Environmental Protection UK Conference (EPUK), Birmingham, UK, 13 November 2019. [Google Scholar]
- Glaab, P.; Wieland, F.; Santos, M.; Sharma, R.; Tamburro, R.; Lee, P.U. Simulating Fleet Noise for Notional UAM Vehicles and Operations in New York. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Rizzi, S.A.; Huff, D.L.; Boyd, D.D.; Bent, P.; Henderson, B.S.; Pascioni, K.A.; Sargent, D.C.; Josephson, D.L.; Marsan, M.; He, H.; et al. Urban Air Mobility Noise: Current Practice, Gaps, and Recommendations; NASA/TP-20205007433; NASA Langley Research Center: Hampton, VA, USA, 2020. Available online: https://ntrs.nasa.gov/citations/20205007433 (accessed on 20 September 2024).
- Torija, A.J.; Clark, C. Psychoacoustic Approach to Building Knowledge about Human Response to Noise of Unmanned Aerial Vehicles. Int. J. Environ. Res. Public Health 2021, 18, 682. [Google Scholar] [CrossRef] [PubMed]
- DACUS Consortium. Drone DCB Concept and Process. Deliverable D1.1, H2020-SESAR-2019-2, Grant 893864. 8 February 2021. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5d95ef5ef&appId=PPGMS (accessed on 20 September 2024).
- Schäffer, B.; Pieren, R.; Heutschi, K.; Wunderli, J.M.; Becker, S. Drone Noise Emission Characteristics and Noise Effects on Humans—A Systematic Review. Int. J. Environ. Res. Public Health 2021, 18, 5940. [Google Scholar] [CrossRef]
- Hui, C.T.J.; Kingan, M.J.; Hioka, Y.; Schmid, G.; Dodd, G.; Dirks, K.N.; Edlin, S.; Mascarenhas, S.; Shim, Y.-M. Quantification of the Psychoacoustic Effect of Noise from Small Unmanned Aerial Vehicles. Int. J. Environ. Res. Public Health 2021, 18, 8893. [Google Scholar] [CrossRef]
- Kettisen, A. Information Visualization of Performance Indicators for Drones in Urban Areas—A Complementary Module for the Visual Research Tool UTM50. Master’s Thesis, Linkoping University, Linköping, Sweden, 2022. [Google Scholar]
- Ramos-Romero, C.; Green, N.; Roberts, S.; Clark, C.; Torija, A.J. Requirements for Drone Operations to Minimise Community Noise Impact. Int. J. Environ. Res. Public Health 2022, 19, 9299. [Google Scholar] [CrossRef]
- Pascioni, K.A.; Watts, M.E.; Houston, M.; Lind, A.; Stephenson, J.H.; Bain, J. Acoustic Flight Test of the Joby Aviation Advanced Air Mobility Prototype Vehicle. In Proceedings of the 28th AIAA/CEAS Aeroacoustics 2022 Conference, Southampton, UK, 14–17 June 2022; pp. 1–19. [Google Scholar] [CrossRef]
- Council of Mayors (SEQ). Bringing Advanced Air Mobility (AAM) to Brisbane, South East Queensland (SEQ), Australia; Identifying and Implementing the Opportunities AAM Presents for SEQ; Council of Mayors (SEQ): Brisbane City, QLD, Australia, 2023. [Google Scholar]
- EASA. Guidelines on Noise Measurement of Unmanned Aircraft Systems Lighter than 600 kg Operating in the Specific Category (Low and Medium Risk); EASA: Cologne, Germany, 2023.
- AiRMOUR Consortium. Noise and Visual Pollution Tools and Concepts. Deliverable D4.3, H2020-MG-2018-2019-2020, Grant 101006601. 23 August 2023. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e50200cdab&appId=PPGMS (accessed on 20 September 2024).
- UK Civil Aviation Authority. Emerging Technologies: The Effects of eVTOL Aircraft Noise on Humans, CAP 2505; UK Civil Aviation Authority: Crawley, UK, 2023.
- Thomas, K.; Granberg, T.A. Quantifying Visual Pollution from Urban Air Mobility. Drones 2023, 7, 396. [Google Scholar] [CrossRef]
- Siddiqi, M.A.; Iwendi, C.; Jaroslava, K.; Anumbe, N. Analysis on security-related concerns of unmanned aerial vehicle: Attacks, limitations, and recommendations. Math. Biosci. Eng. 2022, 19, 2641–2670. [Google Scholar] [CrossRef]
- AiRMOUR Consortium. UAM Citizen Privacy Handbook. Deliverable D4.4, H2020-MG-2018-2019-2020, Grant 101006601. 17 May 2023. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5fc781e1a&appId=PPGMS (accessed on 20 September 2024).
- Min, H. Leveraging Drone Technology for Last-Mile Deliveries in the e-Tailing Ecosystem. Sustainability 2023, 15, 11588. [Google Scholar] [CrossRef]
- Zhao, P.; Post, J.; Wu, Z.; Du, W.; Zhang, Y. Environmental impact analysis of on-demand urban air mobility: A case study of the Tampa Bay Area. Transp. Res. Part D Transp. Environ. 2022, 110, 103438. [Google Scholar] [CrossRef]
- Ramos, S.; Cruz, T.; Simões, P. Security and Safety of Unmanned Air Vehicles: An Overview. In Proceedings of the European Conference on Information Warfare and Security, Online, 24–25 June 2021; pp. 357–368. [Google Scholar] [CrossRef]
- ASSURED-UAM Consortium. UAM ELCC+E Estimation. Deliverable D2.3, H2020-MG-2020-SingleStage-INEA, Grant 101006696. 31 October 2021. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5e52453c5&appId=PPGMS (accessed on 20 September 2024).
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.J.; Tablado, Z. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef] [PubMed]
- Rebolo-Ifrán, N.; Graña Grilli, M.; Lambertucci, S.A. Drones as a Threat to Wildlife: YouTube Complements Science in Providing Evidence about Their Effect. Environ. Conserv. 2019, 46, 205–210. [Google Scholar] [CrossRef]
- UK Civil Aviation Authority ERCD. ERCD Report 1104: Environmental Metrics for FAS; UK Civil Aviation Authority ERCD: Crawley, UK, 2011.
- Standard ISO 1996-1: 2016; Acoustics—Description, Measurement and Assessment of Environmental Noise—Part 1: Basic Quantities and Assessment Procedures. International Organization for Standardization: Geneva, Switzerland, 2016.
- Wunderli, J.; Pieren, R.; Vienneau, D.; Cajochen, C.; Probst-Hensch, N.; Röösli, M.; Brink, M. Intermittency ratio: A metric reflecting short-term temporal variations of transportation noise exposure. J. Expo. Sci. Environ. Epidemiol. 2016, 26, 575–585. [Google Scholar] [CrossRef]

| Cross-Cutting Area | Sub-Area | Factor |
|---|---|---|
| Geographical | Level of urbanization | Urban, suburban, rural |
| Land use | Recreational, residential, industrial, commercial | |
| Purpose of use of the facility | Hospital, school, sports venue, military, industry, governance | |
| Temporal | Time | Morning, evening, night, school time, work time |
| Day | Weekday, weekend | |
| Season | Winter, spring, summer, autumn | |
| Purpose of flying | Purpose of flying | Delivery of goods, medical, infrastructure surveying, emergency transport, passenger transport |
| Demographic | Age | Age groups (<25, 25–44, 45–64, >65) |
| Gender | Female, male, other | |
| Socio-economic | Occupational status | Employed, unemployed, student, pupil, retired |
| Income level | Low, average, high | |
| Phase of flight | Phase of flight | Take-off, landing, cruise, hover |
| Activity type | Activity type | Home, work, education, other |
| Performance Indicator | Unit | Description | Source |
|---|---|---|---|
| NO-1: Area-based people’s exposure to noise (LAeq) | person | The number of people exposed to an equivalent noise level higher than a certain threshold in dBA for a fixed period of time within an area. | Modified U.NOI2, Area-based exposure, [37]; Modified SOC2, Area-based noise exposure [24]. |
| NO-2: Area-based people’s exposure to day–evening–night noise level (Lden) | person | The number of people exposed to a noise level higher than a certain threshold in dBA over a whole day (24 h) within an area. | Modified U.NOI2, Area-based exposure, [37]; Modified SOC2, Area-based noise exposure [24]. |
| NO-3: Trajectory-based people’s exposure to noise (LAE) | person | The number of people exposed to a sound exposure level higher than a certain threshold in dBA for a single drone operation for a time period fixed by the drone trajectory within an area.The same can be carried out for a single drone operation for NO-1. | Modified U.NOI1, Trajectory-based exposure [37]; Modified SOC1, Trajectory-based noise exposure [24]. |
| NO-4: Area-based person–event index | N. person | The number of events N exceeding a certain noise level in dBA multiplied by the number of people exposed over a fixed period of time within an area. | MUSE; Person–Event Index detailed in [72]. |
| NO-5: Duration of area-based people’s exposure to noise | D. person | A certain duration D of noise levels exceeding a certain threshold in dBA multiplied by the number of people exposed over a fixed period of time within an area. | MUSE |
| NO-6: Area-based people’s exposure to event emergence | dB. person | Difference between the noise generated by the overflying drones and local background noise level multiplied by the number of people exposed over a fixed period of time within an area. | MUSE; Sound Emergence detailed in [73]. |
| NO-7: Area-based intermittent exposure to noise | %. person | The number of people multiplied by the ratio of intermittent and continuous sound (Intermittence Ratio) over a fixed period of time within an area. | MUSE; Intermittence Ratio detailed in [74]. |
| Performance Indicator | Unit | Description | Source |
|---|---|---|---|
| VP-1: Trajectory-based people exposed | person | The number of people exposed to a single drone operation, i.e., the sum of individual persons that are able to see the drone. | Modified U.NOI5, Visual trajectory-based exposure [37]; Modified SOC5, Trajectory-based visual pollution exposure [24]. |
| VP-2: Trajectory-based people exposed by concentration threshold | person | The number of people exposed to a visual pollution concentration * higher than a threshold for a single drone operation. | MUSE |
| VP-3: Trajectory-based people exposed by temporal and concentration threshold | person | The number of people exposed to a visual pollution concentration * higher than a threshold for a period longer than T for a single drone operation. | MUSE |
| VP-4: Trajectory-based visual exposure | person. vp. h | Total visual pollution exposure perceived by the people exposed to a single drone operation. | MUSE |
| VP-5: Area-based people exposed | person | The number of people exposed to UAM traffic within an area. | Modified U.NOI6, Visual area-based exposure [37]; Modified SOC6, Area-based visual pollution exposure [24]. |
| VP-6: Area-based people exposed by concentration threshold | person | The number of people exposed to a visual pollution concentration * higher than a threshold at least once a day within an area. | MUSE |
| VP-7: Area-based people exposed by temporal and concentration threshold | person | The number of people exposed to a visual pollution concentration * higher than a threshold for a period longer than T along the day within an area. | MUSE |
| VP-8: Area-based visual exposure | person. vp. h | Total visual pollution concentration * perceived by the people exposed to UAM traffic within an area. | MUSE |
| VP-9: Visual exposure per kilometer | person/km | Kilometers traveled above a zone multiplied by the population density in that zone. | Modified “Visual pollution” [5]. |
| Performance Indicator | Unit | Description | Source |
|---|---|---|---|
| PC-1: Trajectory-based people visually annoyed | person | Total number of people annoyed by (the presence of) a single drone operation. | Modified U.NOI7, Visual trajectory-based annoyance [37]; Modified SOC7, Trajectory-based visual pollution annoyance [24]. |
| PC-2: Trajectory-based people exposed to hovering drones | person | Total number of people visually exposed to a hovering drone at a distance less than a certain threshold for a single drone operation. | MUSE |
| PC-3: Area-based people visually annoyed | person | Total number of people annoyed by the presence of UAs within an area during an observed time period. | Modified U.NOI8, Visual area-based annoyance [37]; Modified SOC8, Area-based visual pollution annoyance [24]. |
| PC-4: Area-based people exposed to hovering drones | person | Total number of people visually exposed to hovering drone(s) at a distance less than a certain threshold within an area during an observed time period. | MUSE |
| PC-5: Area-based duration of visual exposure to different hovering drones | person. vp (hovering drones).h | The accumulated visual exposure to hovering drones in a given area for a given time. | MUSE |
| Performance Indicator | Unit | Description |
|---|---|---|
| AE-1: Deliveries of goods to areas with limited or no transport connections | number | The number of deliveries of goods and equipment to areas with limited or no transport connections during the observed time period. |
| AE-2: Reduced travel time for healthcare-related deliveries | seconds | The amount of time reduced for healthcare-related deliveries by UAs compared to the delivery by road transport during the observed time period. |
| AE-3: Deviation of noise exposure from mean value | number | The amount by which the noise exposure within an area deviates from the mean value for all the areas. |
| AE-4: Deviation of visual pollution exposure from mean value | number | The amount by which visual pollution exposure within an area deviates from the mean value for all the areas. |
| Performance Indicator | Unit | Description | Source |
|---|---|---|---|
| EM-1: Actual average CO2 emission per flight | kg CO2 per flight | Total amount of CO2 emitted by a given number of flights (based on the emissions index of the fuel used, e.g., conventional or sustainable fuel) divided by the number of flights | Same as U.ENV1, Actual average CO2 emission per flight [37]. |
| EM-2: Trajectory-based energy consumption | kwh | The amount of energy consumed by a single drone operation (based on the type of UAM and trajectory). | MUSE |
| EM-3: Trajectory-based CO2-eq emission | kg CO2-eq | The amount of CO2-eq emitted by a single drone operation. | MUSE |
| EM-4: Area-based CO2-eq emission | kg CO2-eq/h | The amount of CO2-eq emitted by UAs within an area during the observed time period. | MUSE |
| EM-5: Area-based CO2-eq emission decrease | kg CO2-eq/h | The amount of CO2-eq emitted less for the observed deliveries with UA introduction (compared to road traffic delivery) within an area during the observed time period. | MUSE |
| Performance Indicator | Unit | Description | Source |
|---|---|---|---|
| EC-1: Area of positive economic influence | km2 | Area * expressed in km2 that would fall into the zone with new jobs as a consequence of drone operations. | MUSE |
| EC-2: Area of negative economic influence | km2 | Area * expressed in km2 that would fall into the zone where property values decrease as a consequence of exposure to regular/frequent drone operations. | Modified “Housing cost”, Change in housing cost as an impact of land-use change from UAM [5]. |
| Performance Indicator | Unit | Description | Source |
|---|---|---|---|
| PS-1: Area-based exposure to hovering drones | drones | Total number of drones hovering at a height below a certain threshold within an area during the observed time period. | MUSE |
| PS-2: Area-based duration of exposure to hovering drones | minutes | Total duration of drones hovering at a height below a certain threshold within an area during the observed time period. | Modified U.NOI11, Privacy based on area exposure [37]. |
| Performance Indicator | Unit | Description | Source |
|---|---|---|---|
| WL-1: Exposure of wildlife for a given trajectory | wildlife | Total amount of wildlife exposed within noise and appearance contours. | Same as WLD1, Trajectory-based noise and visual exposure [24]. |
| WL-2: Exposure of wildlife for a traffic scenario | wildlife | Total amount of wildlife exposed within an area during the observed time period. | Same as WLD2, Area-based noise and visual exposure [24]. |
| WL-3: Annoyance level for single trajectory | wildlife | Total amount of affected wildlife within noise and appearance contours. | Same as WLD3, Trajectory-based noise and visual annoyance [24]. |
| WL-4: Annoyance level for a traffic scenario | wildlife | Total amount of affected wildlife within an area during the observed time period. | Same as WLD4, Area-based noise and visual annoyance [24]. |
| WL-5: Disruption of wildlife for a traffic scenario—noise contour | wildlife | The difference between the total amount of wildlife within noise contours for the two consecutive measurements. | MUSE |
| WL-6: Disruption of wildlife for a traffic scenario—wildlife appearance contour | wildlife | The difference between the total amount of wildlife within their appearance contours for the two consecutive measurements. | MUSE |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krstić Simić, T.; Ganić, E.; Mirković, B.; Baena, M.; LeGriffon, I.; Barrado, C. U-Space Social and Environmental Performance Indicators. Drones 2024, 8, 580. https://doi.org/10.3390/drones8100580
Krstić Simić T, Ganić E, Mirković B, Baena M, LeGriffon I, Barrado C. U-Space Social and Environmental Performance Indicators. Drones. 2024; 8(10):580. https://doi.org/10.3390/drones8100580
Chicago/Turabian StyleKrstić Simić, Tatjana, Emir Ganić, Bojana Mirković, Miguel Baena, Ingrid LeGriffon, and Cristina Barrado. 2024. "U-Space Social and Environmental Performance Indicators" Drones 8, no. 10: 580. https://doi.org/10.3390/drones8100580
APA StyleKrstić Simić, T., Ganić, E., Mirković, B., Baena, M., LeGriffon, I., & Barrado, C. (2024). U-Space Social and Environmental Performance Indicators. Drones, 8(10), 580. https://doi.org/10.3390/drones8100580