
Characteristics Analysis and Modeling of Integrated Sensing and Communication Channel for Unmanned Aerial Vehicle Communications





Abstract
1. Introduction
- (1)
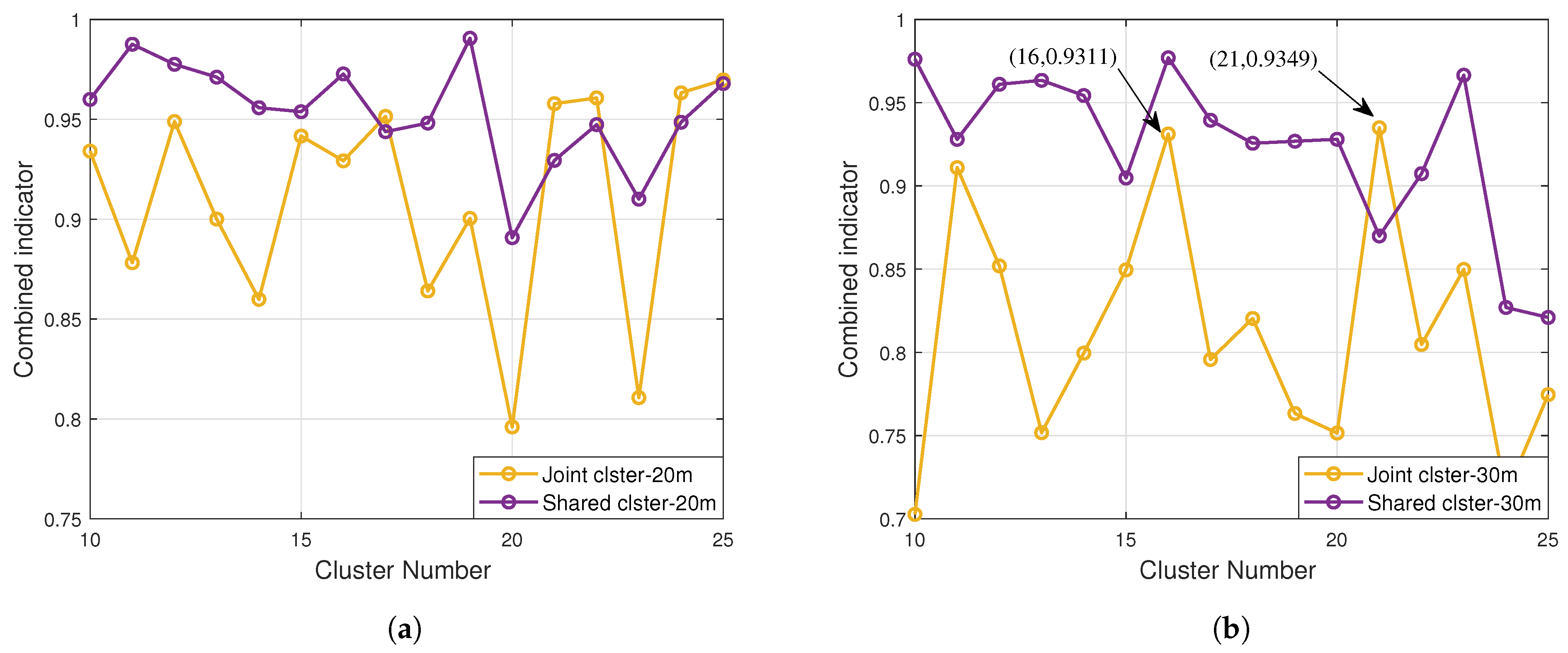
- The UAV-to-ground ISAC channel datasets at the heights of 20 m and 30 m are constructed. Based on the acquired channel data, the optimal cluster number is selected by a combined index. The number of clusters can vary according to the complexity of the scene, which provides a reference for the subsequent evolution of clusters.
- (2)
- A 3D automatic tracking algorithm for UAV ISAC channels is proposed, which can reflect the B–D process of clusters. It is found that in the B–D process of clusters, the number of clusters is distributed around the optimal number. By fitting the survival time of the cluster, the effects of flight altitude and the addition of sensing clusters on the channel characteristics are investigated.
- (3)
- The impact of height variation on the channel delay characteristics, angle characteristics, and SD is investigated, and the influence of the addition of a sensing channel on channel characteristics is analyzed. It is found that the increase in the flight altitude makes the angle and delay characteristics in the cluster more concentrated, and the SD decreases. Furthermore, the pervasive channel simulator is used to verify the validity of the results.
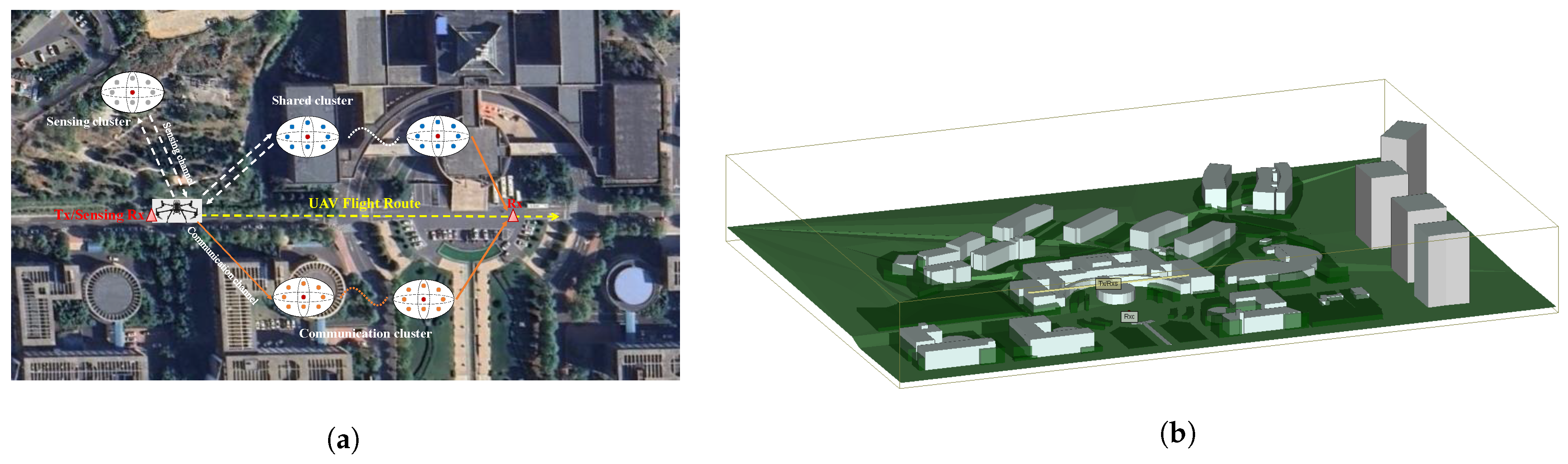
2. Network Architecture of UAV ISAC Communications
3. Joint Clustering and Tracking for UAV ISAC Channels
3.1. RT-Based UAV ISAC Channel Database
3.2. Clustering under Combined Indicators
3.3. 3D Automatic Tracking Algorithm
4. Simulation and Evolution Results Analysis
4.1. Inter-Cluster Characterization
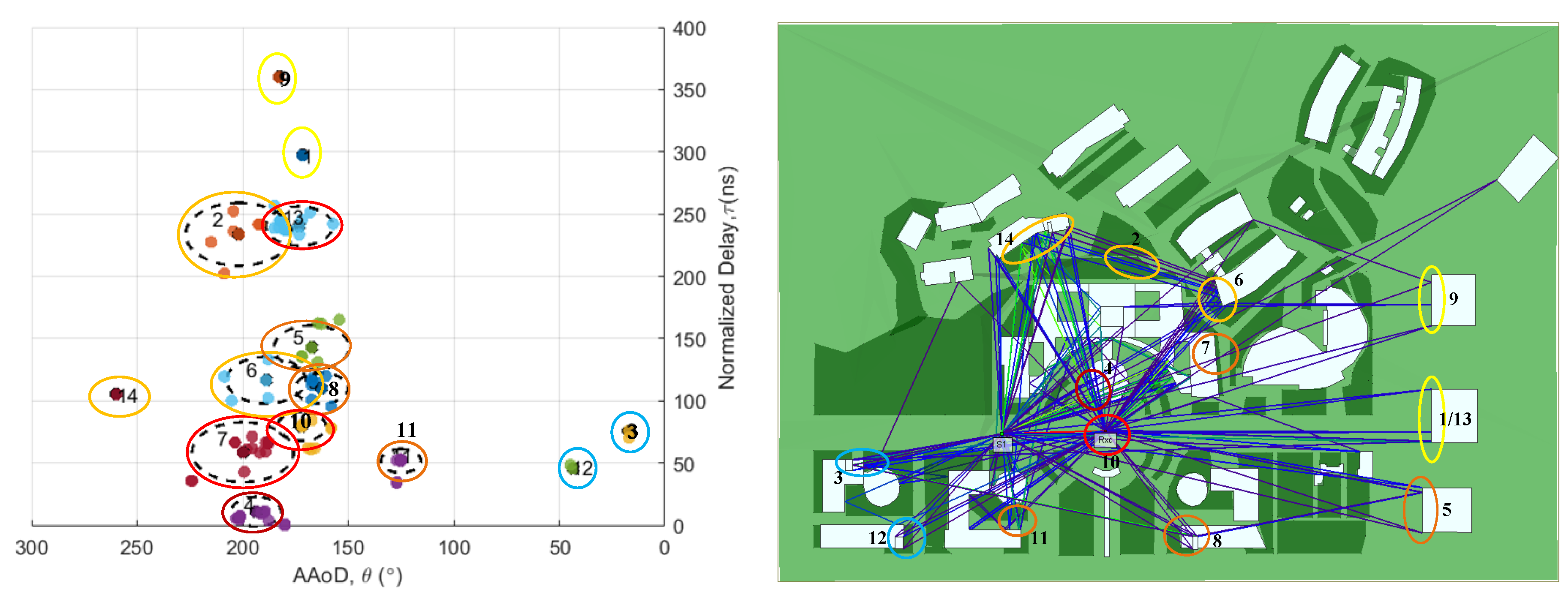
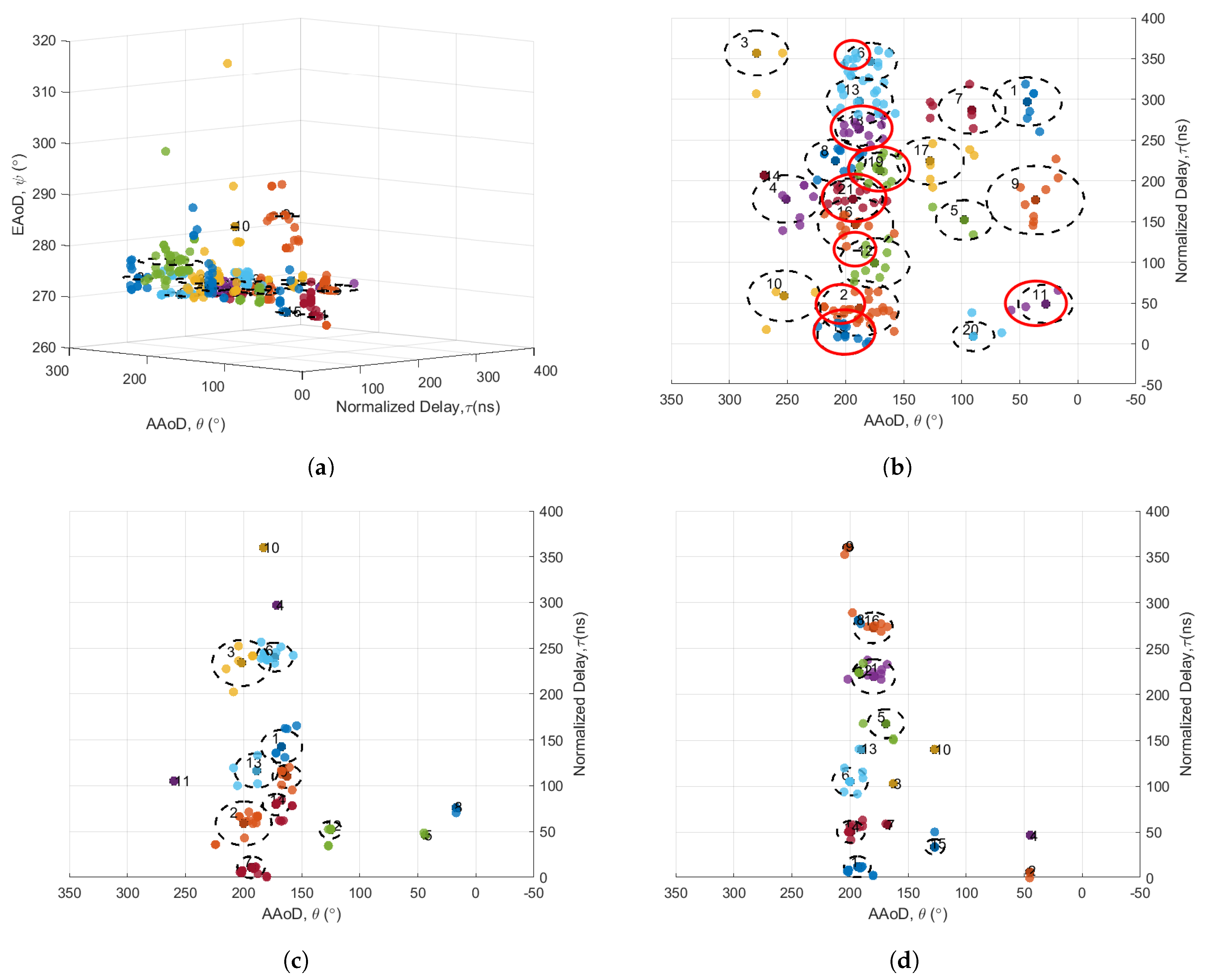
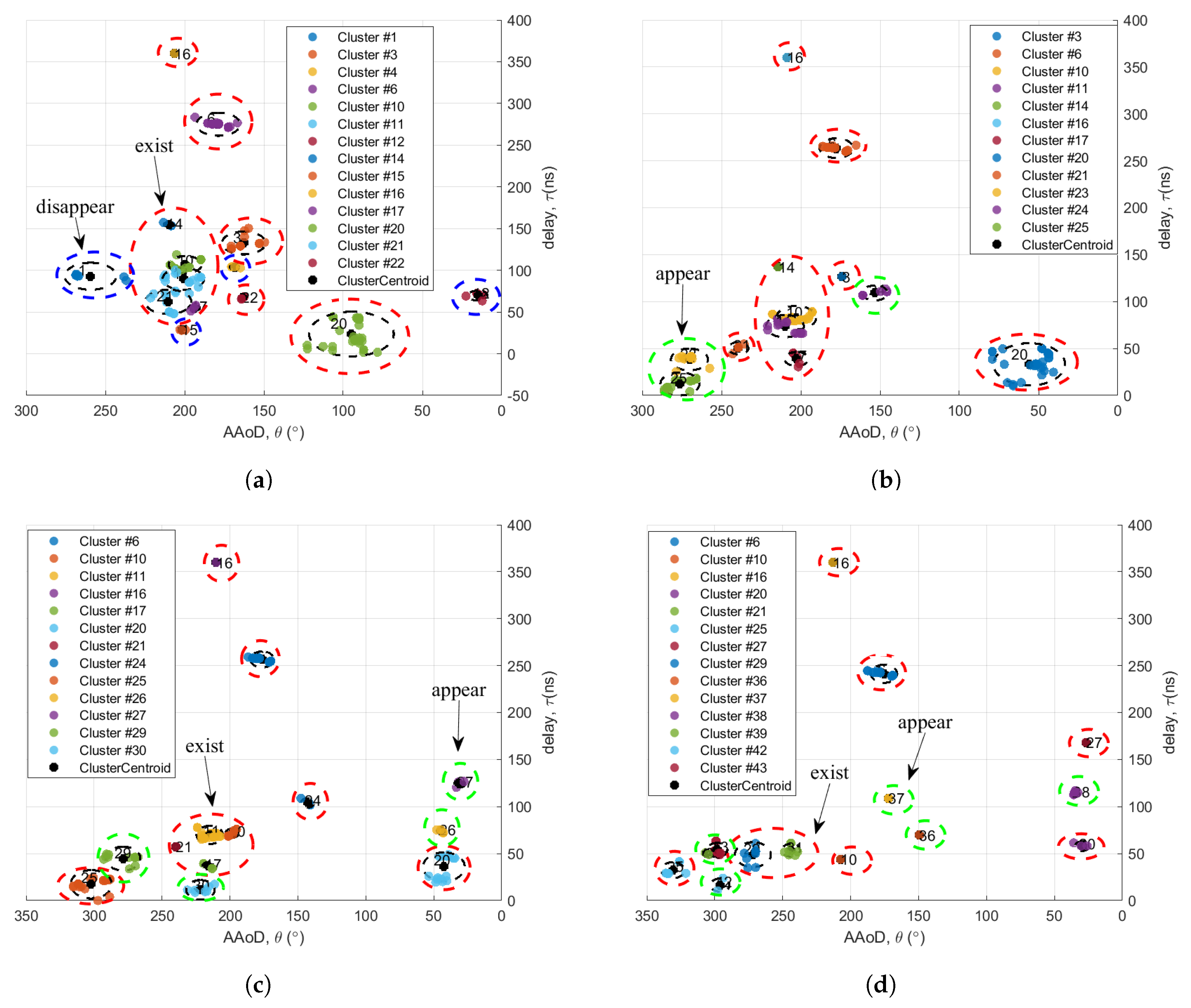
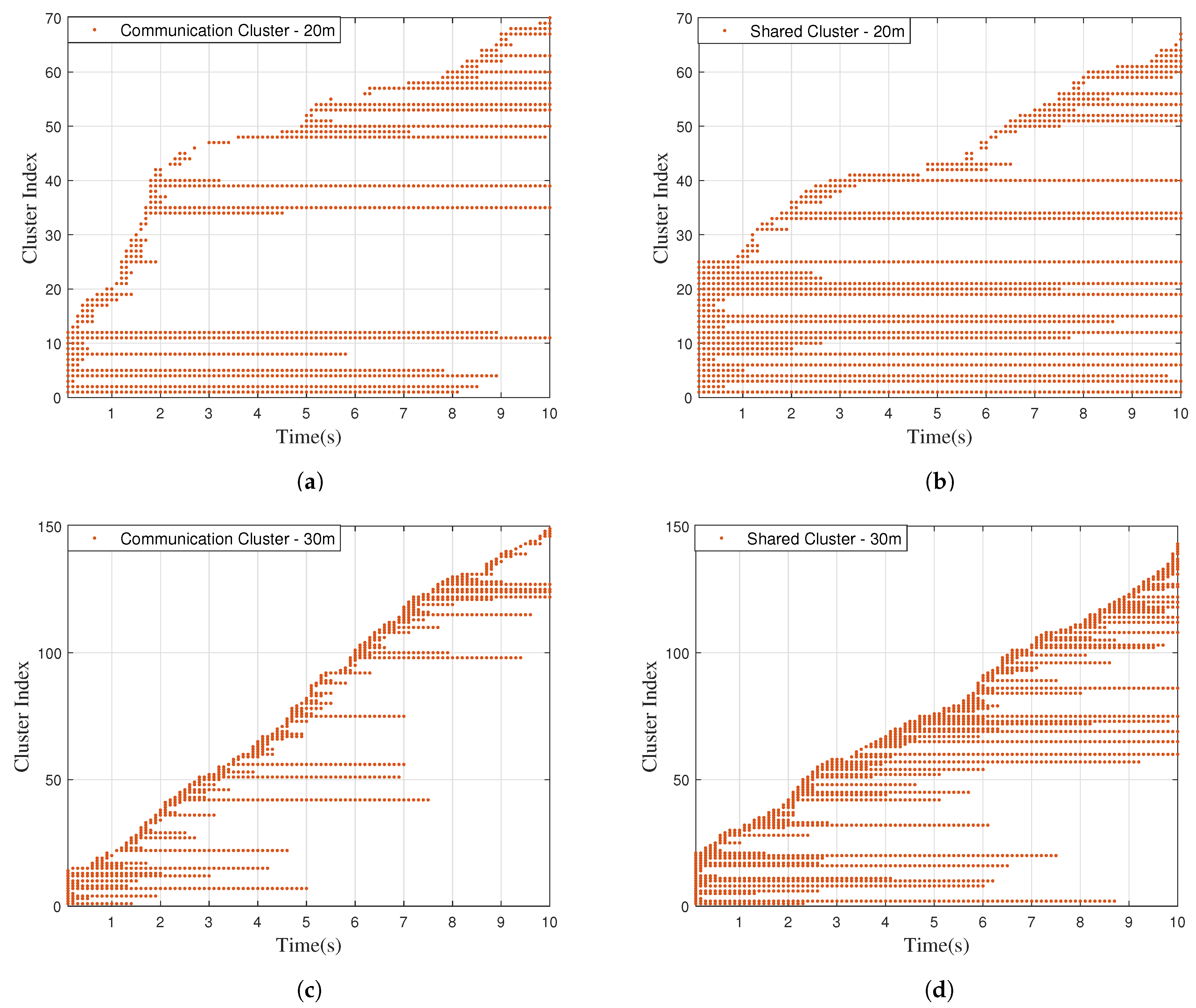
4.1.1. Clustering and Evolution Results
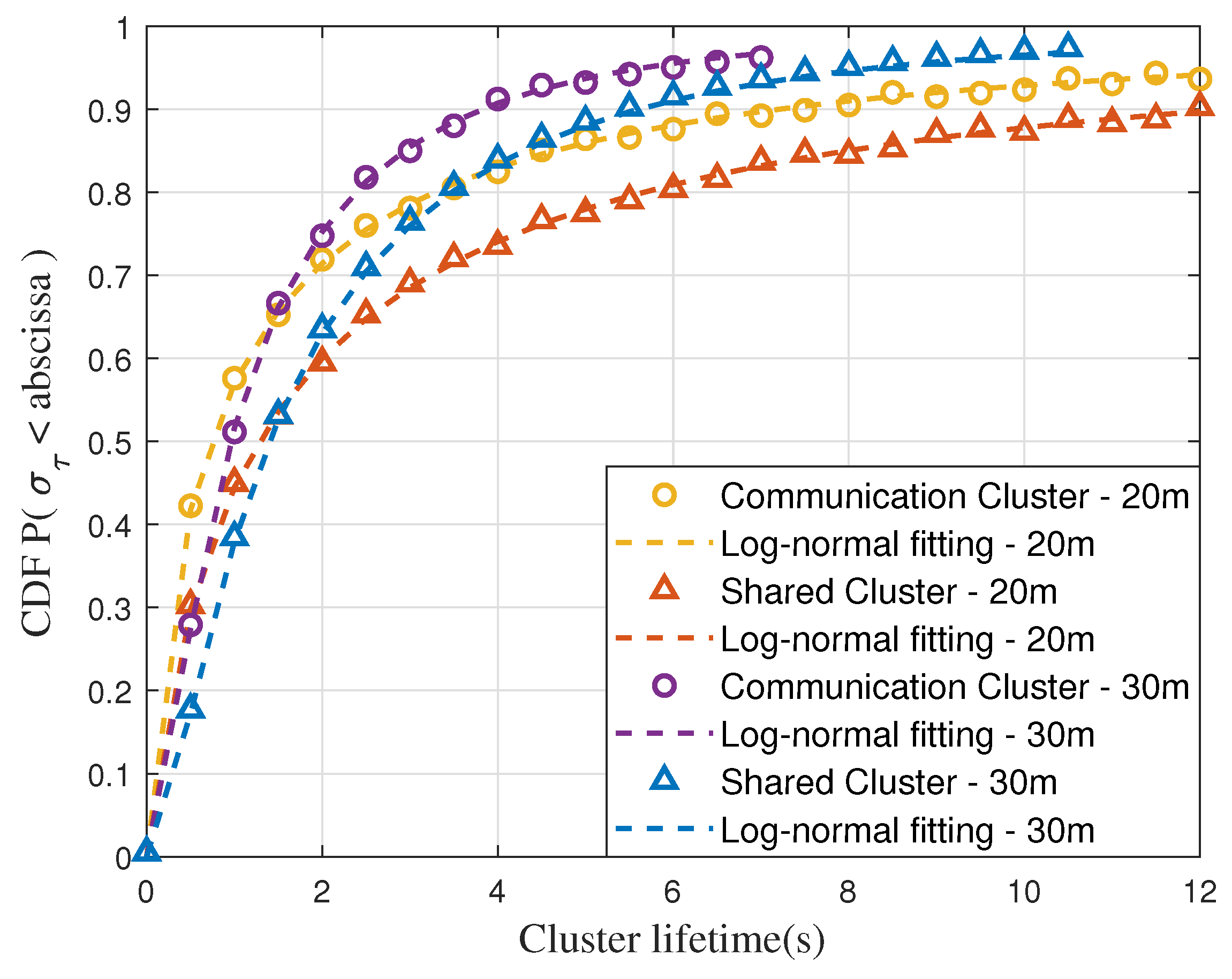
4.1.2. The Lifetime of the Cluster
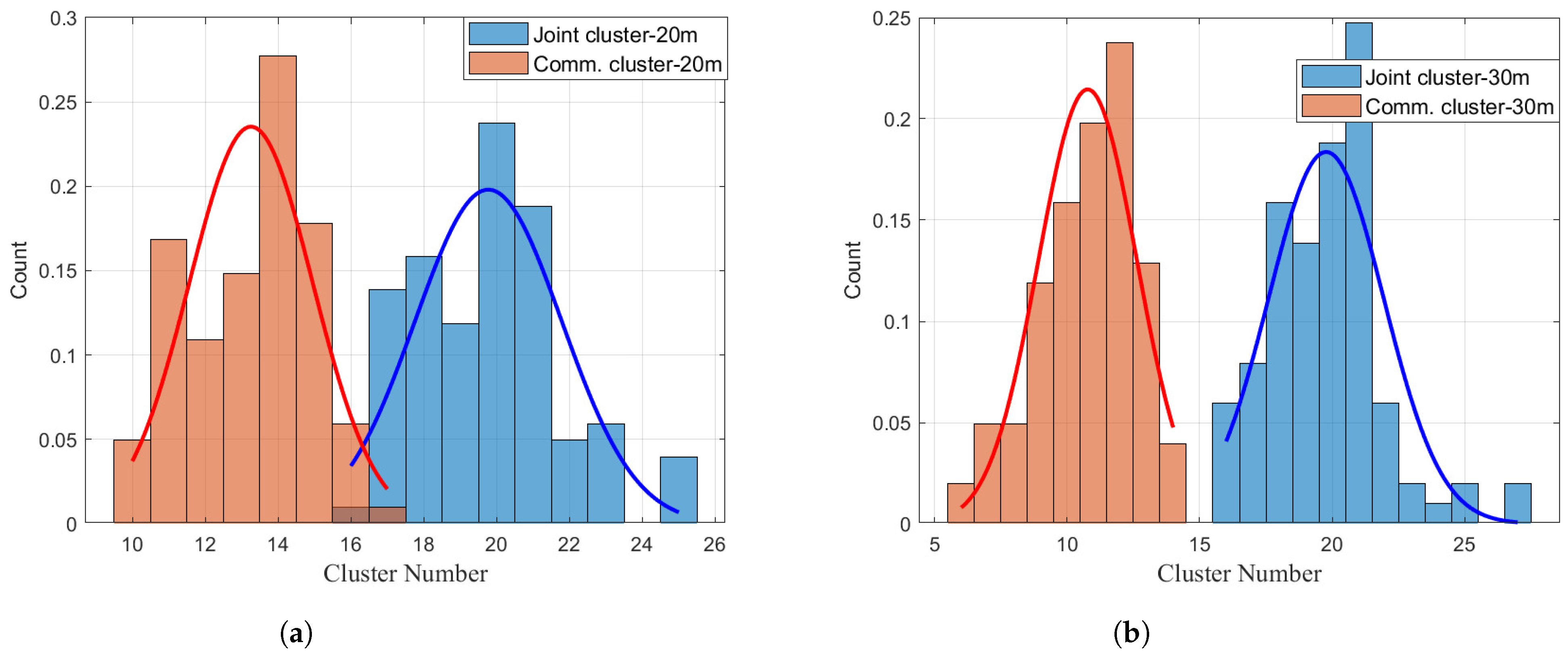
4.1.3. Number of Clusters
4.2. Intra-Cluster Characterization
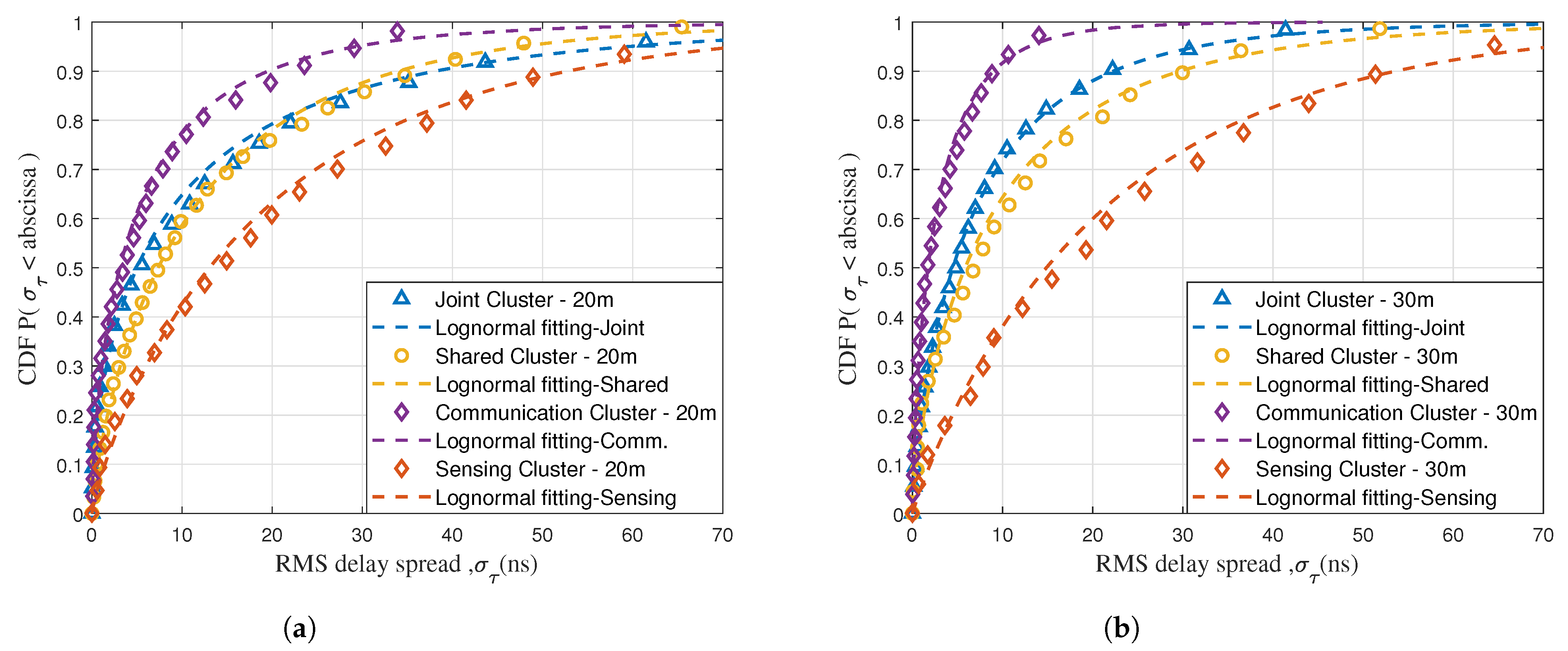
4.2.1. RMS DS
4.2.2. RMS AS
4.2.3. Delay Offset
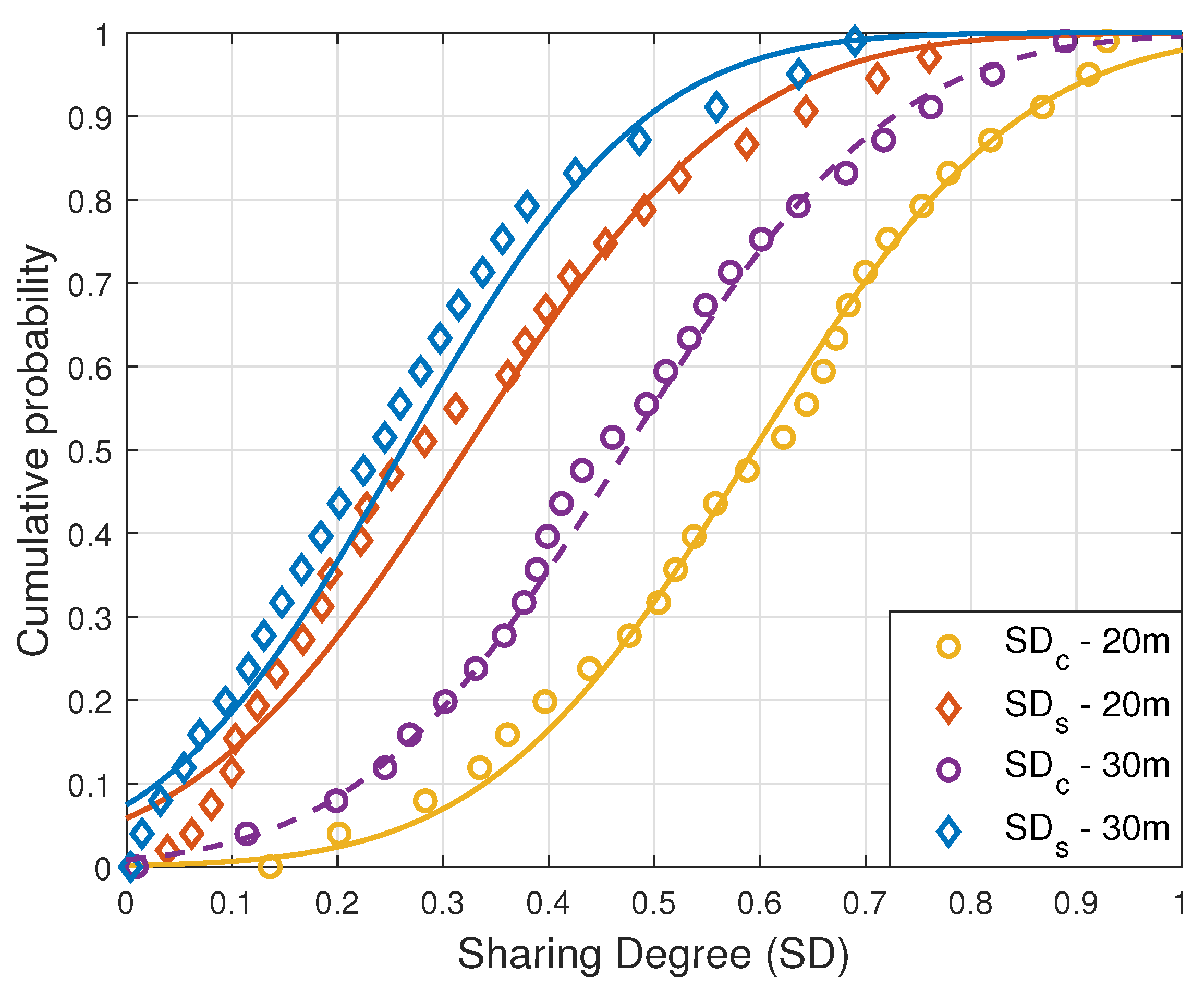
4.2.4. SD
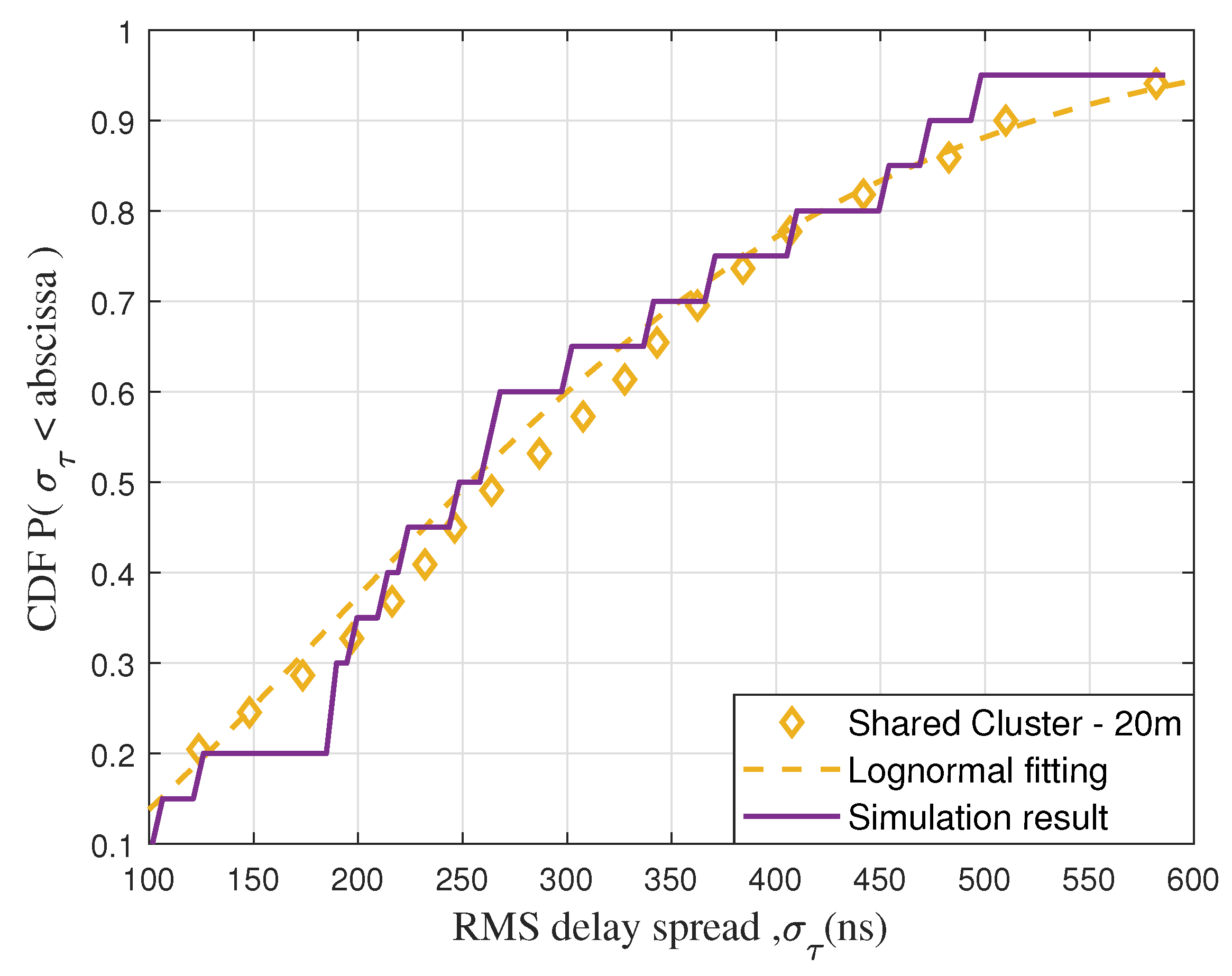
4.3. Simulation Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, C.X.; You, X.; Gao, X.; Zhu, X.; Li, Z.; Zhang, C.; Wang, H.; Huang, Y.; Chen, Y.; Haas, H.; et al. On the Road to 6G: Visions, Requirements, Key Technologies, and Testbeds. IEEE Commun. Surv. Tutor. 2023, 25, 905–974. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.; Qiu, Y.; Liu, X.; Song, M.; Fan, W.; Kokkeler, A.B.J.; Miao, Y. A UAV-Aided Real-Time Channel Sounder for Highly Dynamic Nonstationary A2G Scenarios. IEEE Trans. Instrum. Meas. 2023, 72, 1–15. [Google Scholar] [CrossRef]
- Meng, K.; Wu, Q.; Xu, J.; Chen, W.; Feng, Z.; Schober, R.; Swindlehurst, A.L. UAV-Enabled Integrated Sensing and Communication: Opportunities and Challenges. IEEE Wirel. Commun. 2024, 31, 97–104. [Google Scholar] [CrossRef]
- Cheng, X.; Li, Y.; Bai, L. UAV Communication Channel Measurement, Modeling, and Application. J. Commun. Inf. Netw. 2019, 4, 32–43. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.; Wang, C.X.; Ye, X.; Gomez-Ponce, J.; Cai, X.; Miao, Y.; Cui, Z.; Wu, Q.; Fan, W. A Survey on Channel Sounding Technologies and Measurements for UAV-Assisted Communications. IEEE Trans. Instrum. Meas. 2024, 73, 1–24. [Google Scholar] [CrossRef]
- Ye, X.; Li, H.; Mao, K.; Zhu, Q.; Ali, F.; Chen, X.m.; Qiu, Y.; Li, H. Measurement-Based Channel Characteristics for Air-to-Ground Communications Under Rural Areas. In Proceedings of the 2024 18th European Conference on Antennas and Propagation (EuCAP), Glasgow, UK, 17–22 March 2024; pp. 1–5. [Google Scholar]
- Zhou, Y.; Liu, X.; Zhai, X.; Zhu, Q.; Durrani, T.S. UAV-Enabled Integrated Sensing, Computing, and Communication for Internet of Things: Joint Resource Allocation and Trajectory Design. IEEE Internet Things J. 2024, 11, 12717–12727. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J.; Zhang, Y.; Yuan, Z.; Liu, G. A Shared Cluster-Based Stochastic Channel Model for Integrated Sensing and Communication Systems. IEEE Trans. Veh. Technol. 2024, 73, 6032–6044. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J.; Zhang, Y.; Gong, H.; Jiang, T.; Liu, G. How to Extend 3-D GBSM to Integrated Sensing and Communication Channel With Sharing Feature? IEEE Wirel. Commun. Lett. 2024, 13, 2045–2049. [Google Scholar] [CrossRef]
- Inca, S.; Mrozowski, A.; Prado-Alvarez, D.; Monserrat, J.F.; Zhang, Y.; Yang, W.; Chen, Y. Angular Correlation Study of Sensing and Communication Channels in V2X Scenarios for 6G ISAC Usage. In Proceedings of the 2023 IEEE Globecom Workshops (GC Wkshps), Kuala Lumpur, Malaysia, 4–8 December 2023; pp. 1189–1194. [Google Scholar]
- Yang, R.; Wu, Y.; Huang, J.; Wang, C.X. A Novel 3D Non-stationary Localization-assisted ISAC Channel Model. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar]
- Salmi, J.; Richter, A.; Koivunen, V. Detection and Tracking of MIMO Propagation Path Parameters Using State-Space Approach. IEEE Trans. Signal Process. 2009, 57, 1538–1550. [Google Scholar] [CrossRef]
- Yin, X.; Steinbock, G.; Kirkelund, G.E.; Pedersen, T.; Blattnig, P.; Jaquier, A.; Fleury, B.H. Tracking of Time-Variant Radio Propagation Paths Using Particle Filtering. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 920–924. [Google Scholar]
- Remcom. Wireless InSite. Available online: https://www.remcom.com/wireless-insite-em-propagation-software (accessed on 1 May 2024).
- Li, Y.; Chen, Y.; Yan, D.; Guan, K.; Han, C. Channel Characterization and Ray Tracing Assisted Stochastic Modeling for Urban Vehicle-to-Infrastructure Terahertz Communications. IEEE Trans. Veh. Technol. 2023, 72, 2748–2763. [Google Scholar] [CrossRef]
- Guan, K.; Ai, B.; Peng, B.; He, D.; Li, G.; Yang, J.; Zhong, Z.; Kürner, T. Towards Realistic High-Speed Train Channels at 5G Millimeter-Wave Band—Part I: Paradigm, Significance Analysis, and Scenario Reconstruction. IEEE Trans. Veh. Technol. 2018, 67, 9112–9128. [Google Scholar] [CrossRef]
- Czink, N.; Cera, P.; Salo, J.; Bonek, E.; Nuutinen, J.p.; Ylitalo, J. A Framework for Automatic Clustering of Parametric MIMO Channel Data Including Path Powers. In Proceedings of the IEEE Vehicular Technology Conference, Montreal, QC, Canada, 25–28 September 2006; pp. 1–5. [Google Scholar]
- Li, Y.; Zhang, J.; Ma, Z.; Zhang, Y. Clustering Analysis in the Wireless Propagation Channel with a Variational Gaussian Mixture Model. IEEE Trans. Big Data 2020, 6, 223–232. [Google Scholar] [CrossRef]
- Wang, Q.; Ai, B.; He, R.; Guan, K.; Li, Y.; Zhong, Z.; Shi, G. A Framework of Automatic Clustering and Tracking for Time-Variant Multipath Components. IEEE Commun. Lett. 2017, 21, 953–956. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise; AAAI Press: Washington, DC, USA, 1996; pp. 226–231. [Google Scholar]
- Zhou, T.; Qiao, Y.; Salous, S.; Liu, L.; Tao, C. Machine Learning-Based Multipath Components Clustering and Cluster Characteristics Analysis in High-Speed Railway Scenarios. IEEE Trans. Antennas Propag. 2022, 70, 4027–4039. [Google Scholar] [CrossRef]
- Yang, M.; Ai, B.; He, R.; Wang, G.; Chen, L.; Li, X.; Huang, C.; Ma, Z.; Zhong, Z.; Wang, J.; et al. Measurements and Cluster-Based Modeling of Vehicle-to-Vehicle Channels With Large Vehicle Obstructions. IEEE Trans. Wirel. Commun. 2020, 19, 5860–5874. [Google Scholar] [CrossRef]
- Wang, C.X.; Lv, Z.; Gao, X.; You, X.; Hao, Y.; Haas, H. Pervasive Wireless Channel Modeling Theory and Applications to 6G GBSMs for All Frequency Bands and All Scenarios. IEEE Trans. Veh. Technol. 2022, 71, 9159–9173. [Google Scholar] [CrossRef]
- Wang, C.X.; Lv, Z.; Chen, Y.; Haas, H. A Complete Study of Space-Time-Frequency Statistical Properties of the 6G Pervasive Channel Model. IEEE Trans. Commun. 2023, 71, 7273–7287. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Details of Simulation | ||||
|---|---|---|---|---|
| Simulation Parameters | Parameter | Value | ||
| Frequency/Bandwidth | 3.5 GHz/200 MHz | |||
| Transmit Power | 10 dBm | |||
| Tx Antenna | Omnidirectional | |||
| Rx Communication/Sensing Antenna | Omnidirectional | |||
| Reflection/Difraction/Transmission | 6/1/1 | |||
| Material Parameters | Material | Permittivity | Conductivity (S/m) | Thickness (m) |
| Wet Earth | 25.000 | 0.0200 | - | |
| Concrete | 7.000 | 0.015 | 0.300 | |
| Forest | 0.050 | 0.0005 | 250 | |
| Asphalt | 5.720 | 0.0004 | 0.300 | |
| Glass | 6.270 | 0.2287/0.1915 | 0.003 | |
| Channel Parameters | Statistical Distribution | Value | ||
|---|---|---|---|---|
| 20 m | 30 m | |||
| Cluster lifetime | Log-normal distribution [mean] | |||
| Cluster delay distribution | RMS DS (s) | Log-normal distribution [mean] | ||
| delay offset (s) | Zero-mean Laplace distribution [scale] | |||
| Cluster angle distribution | RMS AS (rad) | Log-normal distribution [] | ||
| AOD offset (rad) | Zero-mean
Laplace distribution [scale] | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Liu, Y.; Zhang, X.; Zhang, Y.; Huang, J.; Bian, J. Characteristics Analysis and Modeling of Integrated Sensing and Communication Channel for Unmanned Aerial Vehicle Communications. Drones 2024, 8, 538. https://doi.org/10.3390/drones8100538
Li X, Liu Y, Zhang X, Zhang Y, Huang J, Bian J. Characteristics Analysis and Modeling of Integrated Sensing and Communication Channel for Unmanned Aerial Vehicle Communications. Drones. 2024; 8(10):538. https://doi.org/10.3390/drones8100538
Chicago/Turabian StyleLi, Xinru, Yu Liu, Xinrong Zhang, Yi Zhang, Jie Huang, and Ji Bian. 2024. "Characteristics Analysis and Modeling of Integrated Sensing and Communication Channel for Unmanned Aerial Vehicle Communications" Drones 8, no. 10: 538. https://doi.org/10.3390/drones8100538
APA StyleLi, X., Liu, Y., Zhang, X., Zhang, Y., Huang, J., & Bian, J. (2024). Characteristics Analysis and Modeling of Integrated Sensing and Communication Channel for Unmanned Aerial Vehicle Communications. Drones, 8(10), 538. https://doi.org/10.3390/drones8100538