


Unmanned Aerial Vehicles (UAVs) in Landslide Investigation and Monitoring: A Review

Abstract
1. Introduction
2. UAVs Description
2.1. UAVs Types
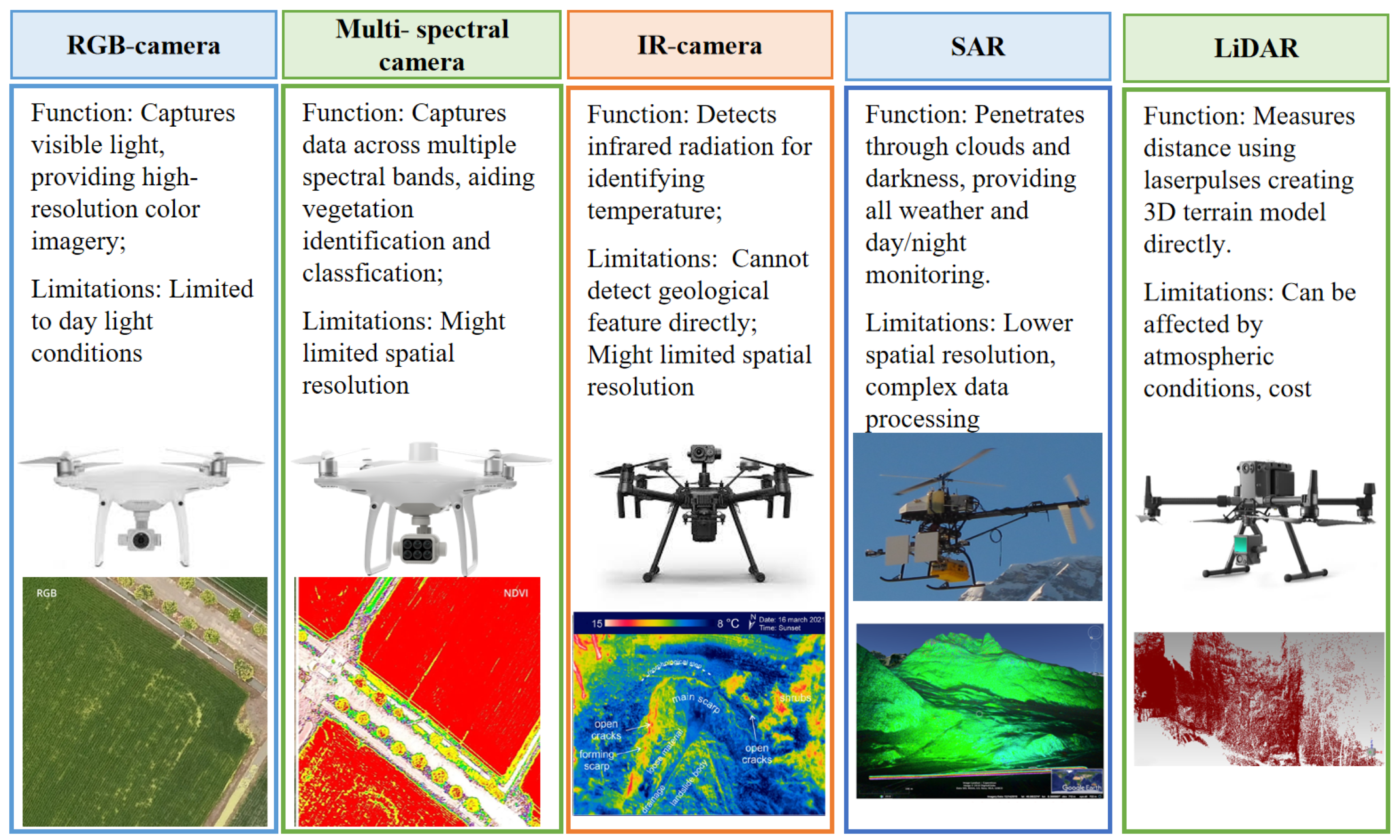
2.2. Overview of UAV Sensors
2.2.1. Optical Sensors
Visible Camera
Thermal Infrared Range (IR) Camera
Multi-Spectral Sensors Camera
2.2.2. Light Detection and Ranging (LiDAR)
2.2.3. Synthetic Aperture Radar (SAR)
3. Integrated UAV Methodology for Landslide Analysis
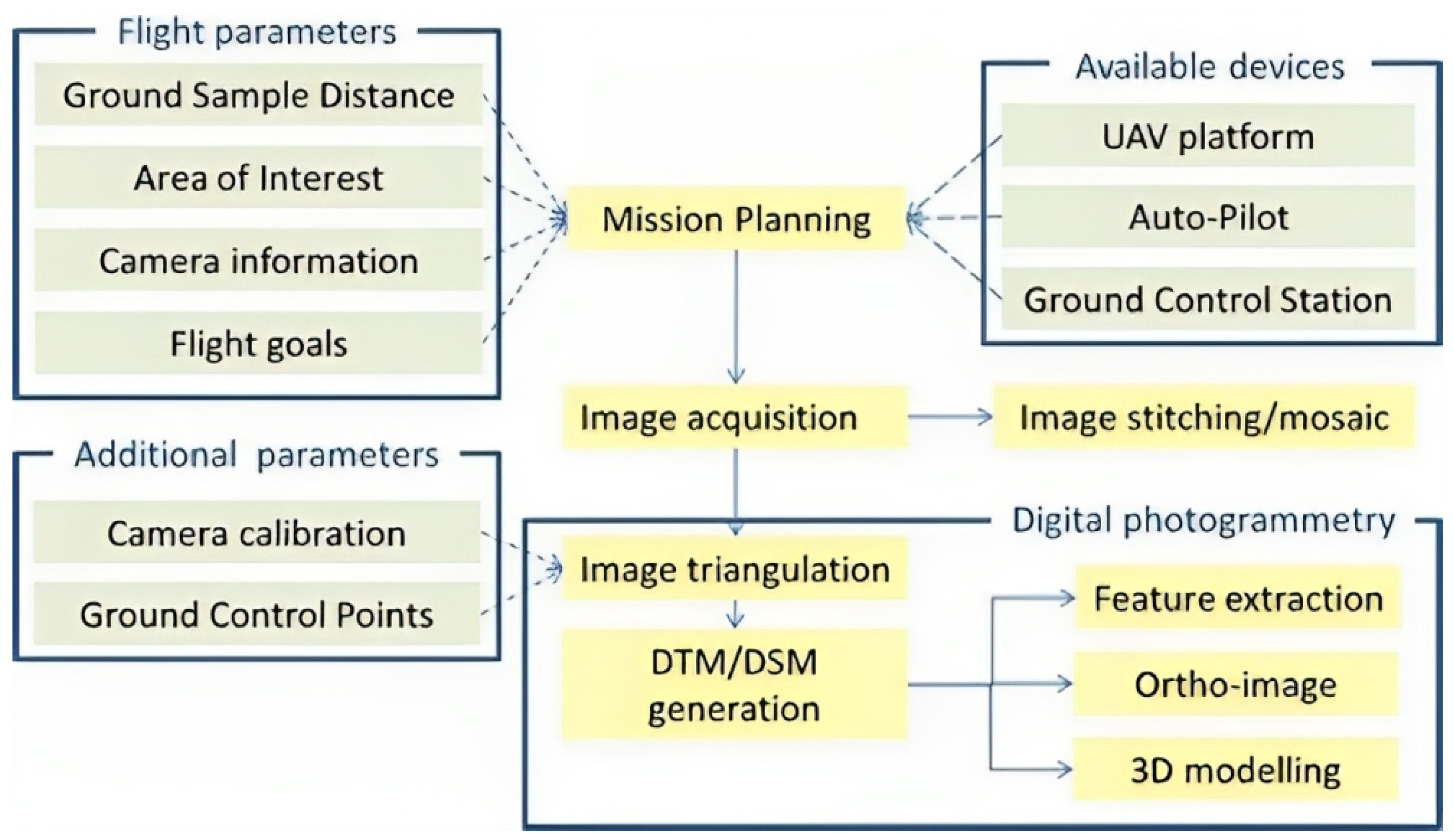
3.1. UAV-Based Aerial Images
3.2. Model Reconstructions
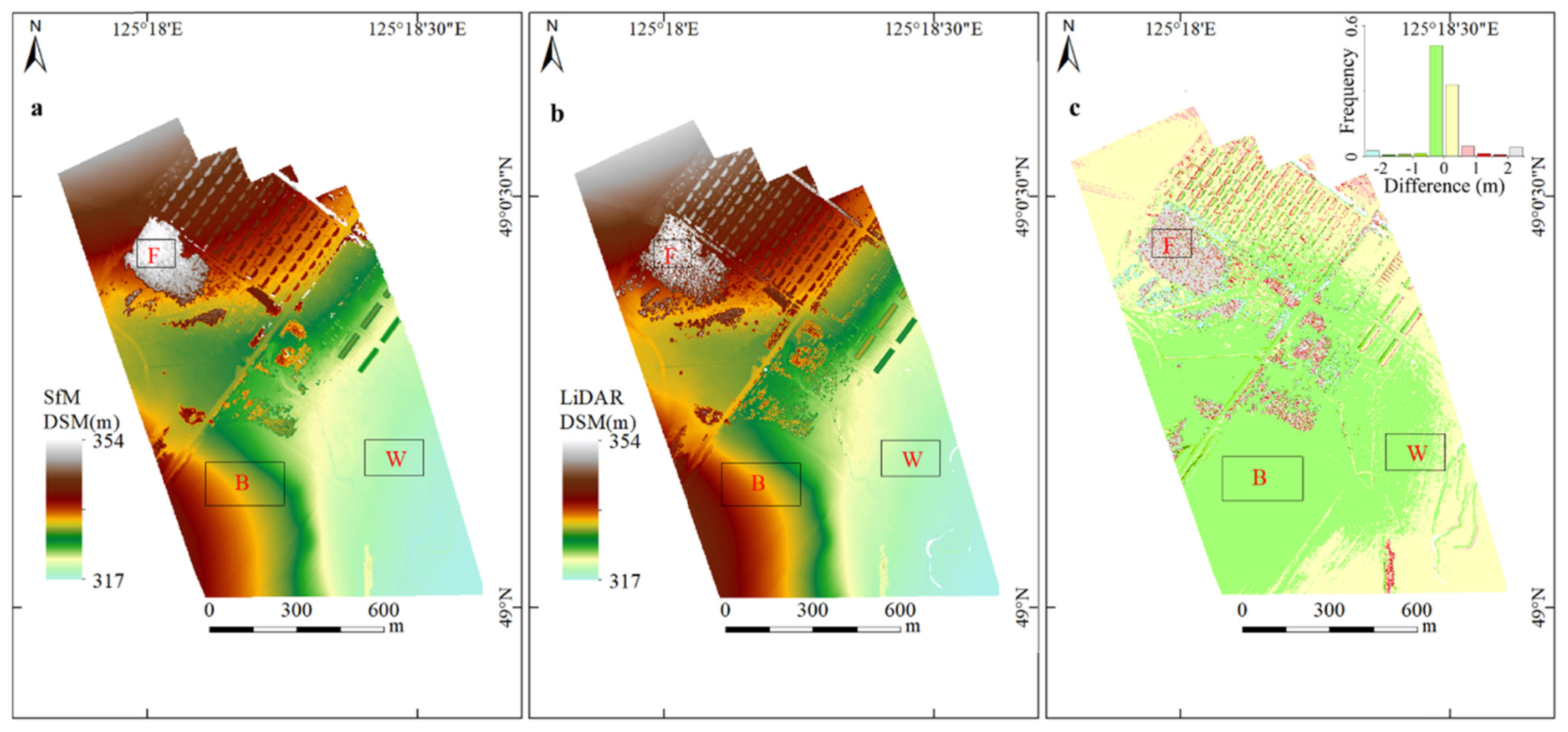
3.2.1. UAV-Lidar-Based Reconstructions
3.2.2. UAV-Image-Based Reconstructions
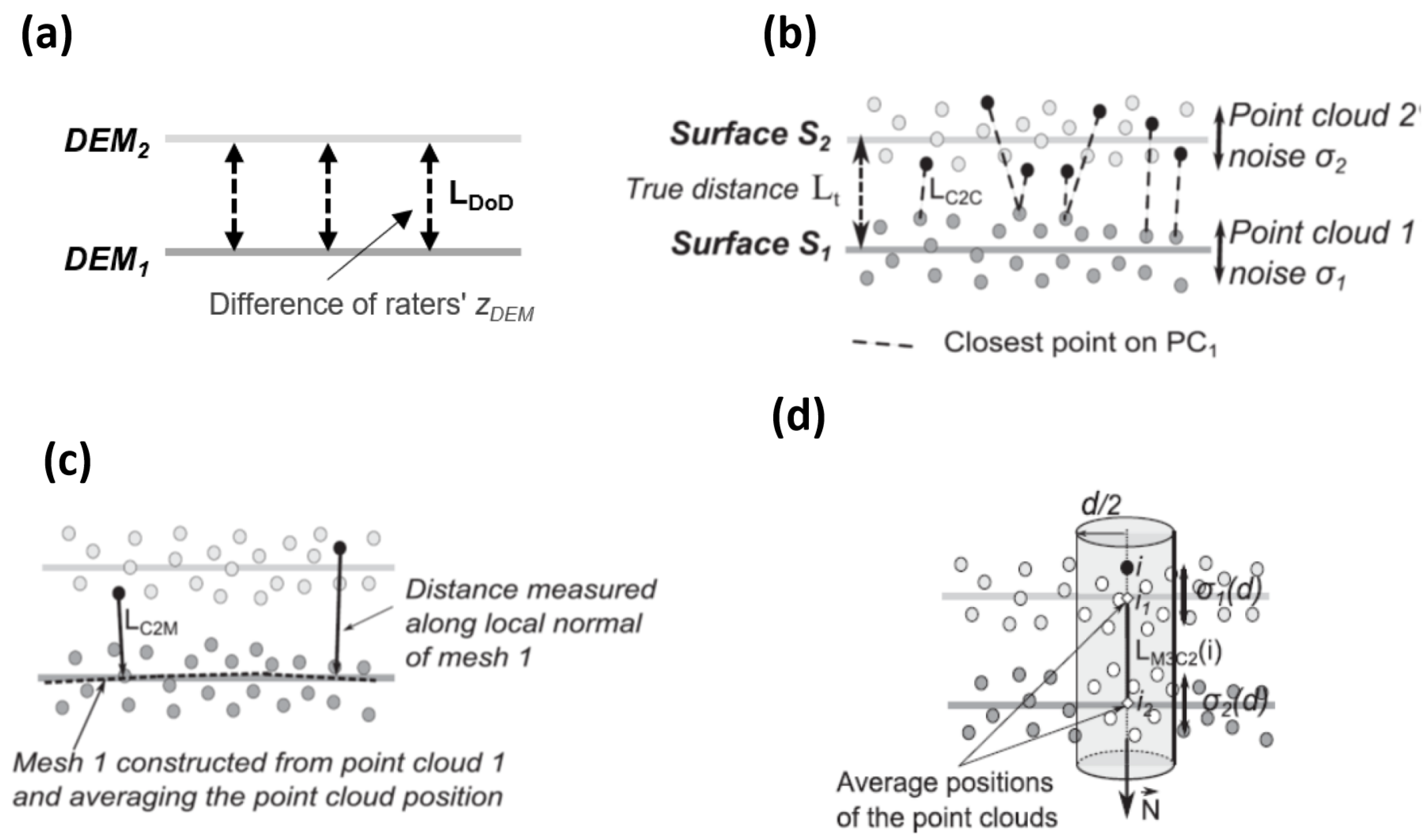
3.3. Change Detection Based on Multi-Temporal 3D Models
4. Applications of UAVs in Landslide
4.1. Applications of UAVs in Landslide Geological Survey
4.1.1. Landslide Mapping and Characterization
4.1.2. Landslide Model Reconstruction
4.1.3. Landslide Susceptibility Mapping
4.2. UAV Applications for Landslide Monitoring
4.2.1. Surface Change Monitoring with UAV-Based Sensing
4.2.2. Crack and Fissure Change Monitoring Using UAV-Based Sensing
4.3. UAV Applications in Emergency Response
4.3.1. Emergency Response Strategies
4.3.2. Automated Detection and Machine Learning Algorithms Using UAV-Based Data
5. Challenges and Opportunities
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| GNSS | Global Navigation Satellite Systems |
| TLS | Terrestrial Laser Scanners |
| InSAR | Interferometric Synthetic Aperture Radar |
| IR | Infrared Range |
| LiDAR | Light Detection and Ranging |
| DOM | Digital Orthophoto Map |
| DEM | Digital Elevation Model |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| SfM | Structure-from-Motion |
| GCP | Ground Control Point |
| M3C2 | Multiscale Model-to-Model Cloud Comparison |
| RTK | Real-time Kinematic |
| NDVI | Normalized Difference Vegetation Index |
| GIS | Geographic Information System |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Scientific Issue, UAV Platform, Camera | Flight Parameter | GSD, Software, Accuracy |
|---|---|---|---|
| Chen et al. (2021) [54] | Landslide modeling; Multicopter-Feima D200; SONY RX1RII with 35.9 × 24 mm sensor | 55 m AGL, overlap/sidelap rate: 80%/65% | GSD 0.9 cm/pixel; Feima UAV manager; RMSxy < 1.7 cm, RMSz < 1.4 cm |
| Colica et al. (2021) [55] | Geological surveys; Multicopter-DJI Phantom 4 Pro; 1″ CMOS, 20-MP RGB camera | 30 m above the launch location, overlap/sidelap rate: >80%/>60% | GSD 0.87 cm/pixel; Agisoft Metashape; RMSE = 0.87 cm |
| Chang et al. (2020) [56] | Geological surveys; Fixed-wing-Skywalker X8; Nikon D800E | 1500–3000 m AGL, overlap/sidelap rate: >80%/>60% | GSD 15 cm/pixel; Pix4D Mapper; RMSE = 0.13–0.47 m |
| Hu et al. (2019) [106] | Landslide modeling; Multicopter-DJI Mavic Pro; 1/2.3″ CMOS, 12.35 MP camera | 149.7 m above the launch location, overlap/sidelap rate: 75%/75% | GSD 5 cm/pixel; unknown software; RMSE = 0.5 m |
| Rodriguez-Caballero et al. (2021) [154] | Landslide modeling; Multicopter-DJI Phantom 4; 1″ CMOS, 20-MP RGB camera | 60 m above the launch location, overlap/sidelap rate: 75%/65% | unknown GSD; Pix4Dmapper; RMSx = 0.096 m, RMSy = 0.14 m, RMSz = 0.33 m |
| Büschelberger et al. (2021) [155] | Landslide characterization; Multicopter-DJI Mavic Pro; 1/2.3″ CMOS, 12.35 MP camera | 110 m above the launch location, overlap/sidelap rate: 75%/65% | GSD < 5 cm/pixel; Agisoft Metashape; 1.4 pixels |
| Vassilakis et al. (2021) [67] | Landslide modeling; Multicopter-DJI Phantom 4; 1″ CMOS, 20-MP RGB camera | 120 m/140 m above the launch location, overlap/sidelap rate: 75%/65% | GSD unknown; Agisoft; <1 cm |
| Dille et al. (2020) [156] | Landslide modeling; Multicopter-DJI Phantom 3 Pro; 1/2.3 CMOS camera, 12 MP RGB camera | 115 m above the launch location, overlap/sidelap rate: 85%/75% | GSD 5 cm/pixel; Agisoft Photoscan; RMSx = 0.07 m, RMSy = 0.24 m |
| Koutalakis et al. (2021) [157] | Landslide modeling; Multicopter-DJI Mavic 2 Pro; 1″ CMOS, 20-MP RGB camera | 50 m above the launch location, overlap/sidelap rate: unknown | GSD unknown; Pix4Dmapper Pro; RMSE = 6 cm |
| Sandric et al. (2023) [158] | Landslide modeling; Multicopter-DJI Phantom 4; 1″ CMOS, 20-MP RGB camera | 114 m above the launch location, overlap/sidelap rate: 70%/70% | GSD unknown; ArcGIS Pro (ESRI); RMSx = 0.14–0.23 m, RMSy = 0.12–0.33 m, RMSz = 0.42–0.56 m |
| Xu et al. (2020) [159] | Landslide modeling; 1: Multicopter-MD4-1000; Sony ILCE-7R camera; 2: Fixed-wing-Feima F1000; | 1: 450 m above the launch location, overlap/sidelap rate: 60%/80%; 2: 270 m above the launch location, overlap/sidelap rate: 65%/80% | GSD 1 6 cm/pixel; GSD 2 4 cm/pixel; Pix4D Mapper, Polyworks; 1: RMSx 0.02–0.05 m, RMSy 0.03–0.04 m, RMSz 0.05–0.11 m; 2: RMSx 0.03–0.04 m, RMSy 0.02–0.04 m, RMSz 0.03–0.06 m; |
| Conforti et al. (2020) [160] | Landslide modeling; Multicopter-Parrot Anafi 21 Mp RGB camera | 131 m above the launch location, overlap/sidelap rate: 85%/80% | GSD 6.7 cm/pixel; Pix4D Mapper; RMSx = 0.19 m, RMSy = 0.18 m, RMSz = 0.21 m |
| Zarate et al. (2023) [161] | Landslide modeling; Multicopter-DJI Phantom 2; GoPro 3+ camera | 84.2–89 m above the launch location, overlap/sidelap rate: 70%/70% | GSD 4.0–4.3 cm/pixel; Agisoft PhotoScan; RMSE = 0.01–0.04 m |
References
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef] [PubMed]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Raj, R.; Kar, S.; Nandan, R.; Jagarlapudi, A. Precision agriculture and unmanned aerial Vehicles (UAVs). Unmanned Aerial Vehicle: Applications in Agriculture and Environment; Springer: Berlin/Heidelberg, Germany, 2020; pp. 7–23. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Elghaish, F.; Matarneh, S.; Talebi, S.; Kagioglou, M.; Hosseini, M.R.; Abrishami, S. Toward digitalization in the construction industry with immersive and drones technologies: A critical literature review. Smart Sustain. Built Environ. 2021, 10, 345–363. [Google Scholar] [CrossRef]
- Garnica-Peña, R.J.; Alcántara-Ayala, I. The use of UAVs for landslide disaster risk research and disaster risk management: A literature review. J. Mt. Sci. 2021, 18, 482–498. [Google Scholar] [CrossRef]
- Gomez, C.; Purdie, H. UAV-based photogrammetry and geocomputing for hazards and disaster risk monitoring—A review. Geoenviron. Disasters 2016, 3, 23. [Google Scholar] [CrossRef]
- Cruden, D. A simple definition of a landslide. Bull. Eng. Geol. Environ. 1991, 43, 27. [Google Scholar] [CrossRef]
- Dai, F.C.; Lee, C.F.; Ngai, Y.Y. Landslide risk assessment and management: An overview. Eng. Geol. 2002, 64, 65–87. [Google Scholar] [CrossRef]
- Maturidi, A.M.A.M.; Kasim, N.; Taib, K.A.; Azahar, W.N.A.W. Rainfall-induced landslide thresholds development by considering different rainfall parameters: A Review. J. Ecol. Eng. 2021, 22, 85–97. [Google Scholar] [CrossRef]
- Tohari, A. Study of rainfall-induced landslide: A review. In Proceedings of the IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 118, p. 012036. [Google Scholar]
- Lee, M.L.; Ng, K.Y.; Huang, Y.F.; Li, W.C. Rainfall-induced landslides in Hulu Kelang area, Malaysia. Nat. Hazards 2014, 70, 353–375. [Google Scholar] [CrossRef]
- Huang, F.; Chen, J.; Liu, W.; Huang, J.; Hong, H.; Chen, W. Regional rainfall-induced landslide hazard warning based on landslide susceptibility mapping and a critical rainfall threshold. Geomorphology 2022, 408, 108236. [Google Scholar] [CrossRef]
- Song, K.; Wang, F.; Yi, Q.; Lu, S. Landslide deformation behavior influenced by water level fluctuations of the Three Gorges Reservoir (China). Eng. Geol. 2018, 247, 58–68. [Google Scholar] [CrossRef]
- Zhao, S.; Zeng, R.; Zhang, H.; Meng, X.; Zhang, Z.; Meng, X.; Wang, H.; Zhang, Y.; Liu, J. Impact of water level fluctuations on landslide deformation at Longyangxia reservoir, Qinghai province, China. Remote Sens. 2022, 14, 212. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, S.; Tan, J.; Li, L.; Yin, X. The influence of water level fluctuation on the stability of landslide in the Three Gorges Reservoir. Arab. J. Geosci. 2020, 13, 845. [Google Scholar] [CrossRef]
- He, C.c.; Hu, X.l.; Xu, C.; Wu, S.s.; Zhang, H.; Liu, C. Model test of the influence of cyclic water level fluctuations on a landslide. J. Mt. Sci. 2020, 17, 191–202. [Google Scholar] [CrossRef]
- Larsen, I.J.; Montgomery, D.R. Landslide erosion coupled to tectonics and river incision. Nat. Geosci. 2012, 5, 468–473. [Google Scholar] [CrossRef]
- Cebulski, J. Impact of river erosion on variances in colluvial movement and type for landslides in the Polish Outer Carpathians. Catena 2022, 217, 106415. [Google Scholar] [CrossRef]
- Premchitt, J.; Brand, E.; Phillipson, H. Landslides caused by rapid groundwater changes. Geol. Soc. London Eng. Geol. Spec. Publ. 1986, 3, 87–94. [Google Scholar] [CrossRef]
- Corominas, J.; Moya, J.; Ledesma, A.; Lloret, A.; Gili, J.A. Prediction of ground displacements and velocities from groundwater level changes at the Vallcebre landslide (Eastern Pyrenees, Spain). Landslides 2005, 2, 83–96. [Google Scholar] [CrossRef]
- Yin, Y.; Wang, F.; Sun, P. Landslide hazards triggered by the 2008 Wenchuan earthquake, Sichuan, China. Landslides 2009, 6, 139–152. [Google Scholar] [CrossRef]
- Keefer, D.K. Investigating landslides caused by earthquakes—A historical review. Surv. Geophys. 2002, 23, 473–510. [Google Scholar] [CrossRef]
- Shao, X.; Xu, C. Earthquake-induced landslides susceptibility assessment: A review of the state-of-the-art. Nat. Hazards Res. 2022, 2, 172–182. [Google Scholar] [CrossRef]
- Huang, R.; Fan, X. The landslide story. Nat. Geosci. 2013, 6, 325–326. [Google Scholar] [CrossRef]
- Korup, O.; Seidemann, J.; Mohr, C.H. Increased landslide activity on forested hillslopes following two recent volcanic eruptions in Chile. Nat. Geosci. 2019, 12, 284–289. [Google Scholar] [CrossRef]
- Froude, M.J.; Petley, D.N. Global fatal landslide occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef]
- Hussain, Y.; Schlögel, R.; Innocenti, A.; Hamza, O.; Iannucci, R.; Martino, S.; Havenith, H.B. Review on the Geophysical and UAV-Based Methods Applied to Landslides. Remote Sens. 2022, 14, 4564. [Google Scholar] [CrossRef]
- Kang, Y.; Zhao, C.; Zhang, Q.; Lu, Z.; Li, B. Application of InSAR techniques to an analysis of the Guanling landslide. Remote Sens. 2017, 9, 1046. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, L.; Ding, X.; Hu, J.; Li, Z.; Zhu, J. Slope deformation prior to Zhouqu, China landslide from InSAR time series analysis. Remote Sens. Environ. 2015, 156, 45–57. [Google Scholar] [CrossRef]
- Van Natijne, A.; Bogaard, T.; van Leijen, F.; Hanssen, R.; Lindenbergh, R. World-wide InSAR sensitivity index for landslide deformation tracking. Int. J. Appl. Earth Obs. Geoinf. 2022, 111, 102829. [Google Scholar] [CrossRef]
- Rosi, A.; Tofani, V.; Tanteri, L.; Tacconi Stefanelli, C.; Agostini, A.; Catani, F.; Casagli, N. The new landslide inventory of Tuscany (Italy) updated with PS-InSAR: Geomorphological features and landslide distribution. Landslides 2018, 15, 5–19. [Google Scholar] [CrossRef]
- Xu, Q.; Zhao, B.; Dai, K.; Dong, X.; Li, W.; Zhu, X.; Yang, Y.; Xiao, X.; Wang, X.; Huang, J.; et al. Remote sensing for landslide investigations: A progress report from China. Eng. Geol. 2023, 321, 107156. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Comert, R.; Avdan, U.; Gorum, T.; Nefeslioglu, H.A. Mapping of shallow landslides with object-based image analysis from unmanned aerial vehicle data. Eng. Geol. 2019, 260, 105264. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Johnson, S.E.; Haneberg, W.C.; Bryson, L.S.; Crawford, M.M. Measuring ground surface elevation changes in a slow-moving colluvial landslide using combinations of regional airborne lidar, UAV lidar and UAV photogrammetric surveys. Q. J. Eng. Geol. Hydrogeol. 2023, 56, qjegh2022–078. [Google Scholar] [CrossRef]
- Li, W.; Zhao, B.; Xu, Q.; Yang, F.; Fu, H.; Dai, C.; Wu, X. Deformation characteristics and failure mechanism of a reactivated landslide in Leidashi, Sichuan, China, on 6 August 2019: An emergency investigation report. Landslides 2020, 17, 1405–1413. [Google Scholar] [CrossRef]
- Zhou, C.; Ai, D.; Huang, W.; Xu, H.; Ma, L.; Chen, L.; Wang, L. Emergency Survey and Stability Analysis of a Rainfall-Induced Soil-Rock Mixture Landslide at Chongqing City, China. Front. Earth Sci. 2021, 9, 774200. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, X.; Ma, H.; Ren, G.; Yu, Z.; Yang, F.; Zhang, H.; Gao, W. Integrative Landslide Emergency Monitoring Scheme Based on GB-INSAR Interferometry, Terrestrial Laser Scanning and UAV Photography. J. Phys. Conf. Ser. 2019, 1213, 052069. [Google Scholar] [CrossRef]
- Corominas, J.; van Westen, C.; Frattini, P.; Cascini, L.; Malet, J.P.; Fotopoulou, S.; Catani, F.; Van Den Eeckhaut, M.; Mavrouli, O.; Agliardi, F.; et al. Recommendations for the quantitative analysis of landslide risk. Bull. Eng. Geol. Environ. 2014, 73, 209–263. [Google Scholar] [CrossRef]
- Qi, J.; Chen, H.; Chen, F. Extraction of landslide features in UAV remote sensing images based on machine vision and image enhancement technology. Neural Comput. Appl. 2022, 34, 12283–12297. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.D.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. Earth Environ. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Saito, H.; Uchiyama, S.; Hayakawa, Y.S.; Obanawa, H. Landslides triggered by an earthquake and heavy rainfalls at Aso volcano, Japan, detected by UAS and SfM-MVS photogrammetry. Prog. Earth Planet. Sci. 2018, 5, 15. [Google Scholar] [CrossRef]
- Saeed, A.; Younes, A.; Cai, C.; Cai, G. A Survey of Hybrid Unmanned Aerial Vehicles. Prog. Aerosp. Sci. 2018, 98, 91–105. [Google Scholar] [CrossRef]
- Gantimurova, S.; Parshin, A.; Erofeev, V. GIS-based landslide susceptibility mapping of the Circum-Baikal railway in Russia using UAV data. Remote Sens. 2021, 13, 3629. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, D.x. A combined survey to evaluate the thermal behavior of loess for a landslide-prone slope on the Heifangtai terrace in Northwest China. J. Mt. Sci. 2021, 18, 620. [Google Scholar] [CrossRef]
- Melis, M.T.; Da Pelo, S.; Erbì, I.; Loche, M.; Deiana, G.; Demurtas, V.; Meloni, M.A.; Dessì, F.; Funedda, A.; Scaioni, M.; et al. Thermal remote sensing from UAVs: A review on methods in coastal cliffs prone to landslides. Remote Sens. 2020, 12, 1971. [Google Scholar] [CrossRef]
- Delbridge, B.G.; Bürgmann, R.; Fielding, E.; Hensley, S.; Schulz, W.H. Three-dimensional surface deformation derived from airborne interferometric UAVSAR: Application to the Slumgullion Landslide. J. Geophys. Res. Solid Earth 2016, 121, 3951–3977. [Google Scholar] [CrossRef]
- Bekar, A.; Antoniou, M.; Baker, C.J. Low-Cost, High-Resolution, Drone-Borne SAR Imaging. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5208811. [Google Scholar] [CrossRef]
- Moreira, L.; Lubeck, D.; Wimmer, C.; Castro, F.; Goes, J.A.; Castro, V.; Alcantara, M.; Ore, G.; Oliveira, L.P.; Bins, L.; et al. Drone-Borne P-band Single-Pass InSAR. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, C.; Liu, X.; Peng, X.; Wang, E.; Wang, S. Application of 3D-DDA integrated with unmanned aerial vehicle–laser scanner (UAV-LS) photogrammetry for stability analysis of a blocky rock mass slope. Landslides 2019, 16, 1645–1661. [Google Scholar] [CrossRef]
- Cheng, Z.; Gong, W.; Tang, H.; Juang, C.H.; Deng, Q.; Chen, J.; Ye, X. UAV photogrammetry-based remote sensing and preliminary assessment of the behavior of a landslide in Guizhou, China. Eng. Geol. 2021, 289, 106172. [Google Scholar] [CrossRef]
- Colica, E.; D’Amico, S.; Iannucci, R.; Martino, S.; Gauci, A.; Galone, L.; Galea, P.; Paciello, A. Using unmanned aerial vehicle photogrammetry for digital geological surveys: Case study of Selmun promontory, northern of Malta. Environ. Earth Sci. 2021, 80, 551. [Google Scholar] [CrossRef]
- Chang, K.J.; Tseng, C.W.; Tseng, C.M.; Liao, T.C.; Yang, C.J. Application of Unmanned Aerial Vehicle (UAV)-Acquired Topography for Quantifying Typhoon-Driven Landslide Volume and Its Potential Topographic Impact on Rivers in Mountainous Catchments. Appl. Sci. 2020, 10, 6102. [Google Scholar] [CrossRef]
- Frodella, W.; Gigli, G.; Morelli, S.; Lombardi, L.; Casagli, N. Landslide mapping and characterization through infrared thermography (IRT): Suggestions for a methodological approach from some case studies. Remote Sens. 2017, 9, 1281. [Google Scholar] [CrossRef]
- Liu, D.; Hu, X.; Zhou, C.; Li, L.; He, C.; Sun, T. Model test study of a landslide stabilized with piles and evolutionary stage identification based on thermal infrared temperature analysis. Landslides 2020, 17, 1393–1404. [Google Scholar] [CrossRef]
- Godone, D.; Allasia, P.; Borrelli, L.; Gullà, G. UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution. Remote Sens. 2020, 12, 1039. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Robles-Kelly, A.; Huynh, C.P. Imaging Spectroscopy for Scene Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A review. Wetl. Ecol. Manag. 2010, 18, 281–296. [Google Scholar] [CrossRef]
- DJIEnterprise. DJI P4 Multispectral Specs. 2023. Available online: https://www.dji.com/p4-multispectral/specs (accessed on 15 January 2024).
- Jaboyedoff, M.; Derron, M.H. Landslide analysis using laser scanners. In Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2020; Volume 23, pp. 207–230. [Google Scholar] [CrossRef]
- Vargas Rivero, J.R.; Gerbich, T.; Buschardt, B.; Chen, J. Data augmentation of automotive lidar point clouds under adverse weather situations. Sensors 2021, 21, 4503. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Xu, F.; Jin, Y.Q. Target classification using the deep convolutional networks for SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4806–4817. [Google Scholar] [CrossRef]
- Vassilakis, E.; Foumelis, M.; Erkeki, A.; Kotsi, E.; Lekkas, E. Post-event surface deformation of Amyntaio slide (Greece) by complementary analysis of Remotely Piloted Airborne System imagery and SAR interferometry. Appl. Geomat. 2021, 13, 65–75. [Google Scholar] [CrossRef]
- Zimmermann, F.; Eling, C.; Klingbeil, L.; Kuhlmann, H. Precise positioning of uavs–dealing with challenging rtk-gps measurement conditions during automated uav flights. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 4, 95–102. [Google Scholar] [CrossRef]
- Zhou, H.; Xiong, H.L.; Liu, Y.; Tan, N.D.; Chen, L. Trajectory planning algorithm of UAV based on system positioning accuracy constraints. Electronics 2020, 9, 250. [Google Scholar] [CrossRef]
- Queralta, J.P.; Almansa, C.M.; Schiano, F.; Floreano, D.; Westerlund, T. Uwb-based system for uav localization in gnss-denied environments: Characterization and dataset. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 4521–4528. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, W. An efficient UAV localization technique based on particle swarm optimization. IEEE Trans. Veh. Technol. 2022, 71, 9544–9557. [Google Scholar] [CrossRef]
- Couturier, A.; Akhloufi, M.A. A review on absolute visual localization for UAV. Robot. Auton. Syst. 2021, 135, 103666. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Frey, O.; Werner, C.L.; Manconi, A.; Coscione, R. Measurement of surface displacements with a UAV-borne/car-borne L-band DInSAR system: System performance and use cases. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 628–631. [Google Scholar] [CrossRef]
- Catani, F. Landslide detection by deep learning of non-nadiral and crowdsourced optical images. Landslides 2021, 18, 1025–1044. [Google Scholar] [CrossRef]
- Lian, X.g.; Li, Z.j.; Yuan, H.y.; Liu, J.b.; Zhang, Y.j.; Liu, X.y.; Wu, Y.r. Rapid identification of landslide, collapse and crack based on low-altitude remote sensing image of UAV. J. Mt. Sci. 2020, 17, 2915–2928. [Google Scholar] [CrossRef]
- Han, L.; Duan, P.; Liu, J.; Li, J. Research on Landslide Trace Recognition by Fusing UAV-Based LiDAR DEM Multi-Feature Information. Remote Sens. 2023, 15, 4755. [Google Scholar] [CrossRef]
- Liao, J.; Zhou, J.; Yang, W. Comparing LiDAR and SfM digital surface models for three land cover types. Open Geosci. 2021, 13, 497–504. [Google Scholar] [CrossRef]
- Choi, S.K.; Ramirez, R.A.; Kwon, T.H. Acquisition of high-resolution topographic information in forest environments using integrated UAV-LiDAR system: System development and field demonstration. Heliyon 2023, 9, e20225. [Google Scholar] [CrossRef] [PubMed]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Leberl, F.; Irschara, A.; Pock, T.; Meixner, P.; Gruber, M.; Scholz, S.; Wiechert, A. Point clouds. Photogramm. Eng. Remote Sens. 2010, 76, 1123–1134. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landforms 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Yordanov, V.; Biagi, L.; Truong, X.; Brovelli, M. Landslide surveys using low-cost UAV and FOSS photogrammetric workflow. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 493–499. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.J.; García-Ferrer, A.; Pérez-Porras, F.J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Ludwig, M.M.; Runge, C.; Friess, N.; Koch, T.L.; Richter, S.; Seyfried, S.; Wraase, L.; Lobo, A.; Sebastià, M.T.; Reudenbach, C.; et al. Quality assessment of photogrammetric methods—A workflow for reproducible UAS orthomosaics. Remote Sens. 2020, 12, 3831. [Google Scholar] [CrossRef]
- Szypuła, B. Accuracy of UAV-based DEMs without ground control points. GeoInformatica 2023, 28, 1–28. [Google Scholar] [CrossRef]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Sona, G.; Pinto, L.; Pagliari, D.; Passoni, D.; Gini, R. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Accuracy Assessment of a UAV-BASED Landslide Monitoring System. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 895–902. [Google Scholar] [CrossRef]
- Fernández, T.; Pérez, J.; Cardenal, J.; Gómez, J.; Colomo, C.; Delgado, J. Analysis of Landslide Evolution Affecting Olive Groves Using UAV and Photogrammetric Techniques. Remote Sens. 2016, 8, 837. [Google Scholar] [CrossRef]
- Ma, S.; Xu, C.; Shao, X.; Zhang, P.; Liang, X.; Tian, Y. Geometric and kinematic features of a landslide in Mabian Sichuan, China, derived from UAV photography. Landslides 2019, 16, 373–381. [Google Scholar] [CrossRef]
- Bentley, M.J.; Foster, J.M.; Potvin, J.J.; Bevan, G.; Sharp, J.; Woeller, D.J.; Take, W.A. Surface displacement expression of progressive failure in a sensitive clay landslide observed with long-term UAV monitoring. Landslides 2023, 20, 531–546. [Google Scholar] [CrossRef]
- Wheaton, J.M. Uncertainity in Morphological Sediment Budgeting of Rivers. Ph.D. Thesis, University of Southampton, Southampton, UK, 2008. [Google Scholar]
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Thibault, G. Change detection on points cloud data acquired with a ground laser scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, W19. [Google Scholar]
- Cignoni, P.; Rocchini, C.; Scopigno, R. Metro: Measuring error on simplified surfaces. In Computer Graphics Forum; Wiley Online Library: Oxford, UK, 1998; Volume 17, pp. 167–174. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Gojcic, Z.; Zhou, C.; Wieser, A. F2S3: Robustified determination of 3D displacement vector fields using deep learning. J. Appl. Geod. 2020, 14, 177–189. [Google Scholar] [CrossRef]
- Gojcic, Z.; Schmid, L.; Wieser, A. Dense 3D displacement vector fields for point cloud-based landslide monitoring. Landslides 2021, 18, 3821–3832. [Google Scholar] [CrossRef]
- Andresen, C.G.; Schultz-Fellenz, E.S. Change Detection Applications in the Earth Sciences Using UAS-Based Sensing: A Review and Future Opportunities. Drones 2023, 7, 258. [Google Scholar] [CrossRef]
- Al-Rawabdeh, A.; He, F.; Moussa, A.; El-Sheimy, N.; Habib, A. Using an unmanned aerial vehicle-based digital imaging system to derive a 3D point cloud for landslide scarp recognition. Remote Sens. 2016, 8, 95. [Google Scholar] [CrossRef]
- Peng, D.; Xu, Q.; Liu, F.; He, Y.; Zhang, S.; Qi, X.; Zhao, K.; Zhang, X. Distribution and failure modes of the landslides in Heitai terrace, China. Eng. Geol. 2018, 236, 97–110. [Google Scholar] [CrossRef]
- Qiu, H.; Cui, P.; Regmi, A.D.; Hu, S.; Wang, X.; Zhang, Y. The effects of slope length and slope gradient on the size distributions of loess slides: Field observations and simulations. Geomorphology 2018, 300, 69–76. [Google Scholar] [CrossRef]
- Hu, S.; Qiu, H.; Pei, Y.; Cui, Y.; Xie, W.; Wang, X.; Yang, D.; Tu, X.; Zou, Q.; Cao, P.; et al. Digital terrain analysis of a landslide on the loess tableland using high-resolution topography data. Landslides 2019, 16, 617–632. [Google Scholar] [CrossRef]
- Lo, C.M.; Li, H.H.; Ke, C.C. Kinematic model of a translational slide in the Cidu section of the Formosan Freeway. Landslides 2016, 13, 141–151. [Google Scholar] [CrossRef]
- Gao, Y.; Yin, Y.; Li, B.; Feng, Z.; Wang, W.; Zhang, N.; Xing, A. Characteristics and numerical runout modeling of the heavy rainfall-induced catastrophic landslide–debris flow at Sanxicun, Dujiangyan, China, following the Wenchuan Ms 8.0 earthquake. Landslides 2017, 14, 1361–1374. [Google Scholar] [CrossRef]
- Scaringi, G.; Fan, X.; Xu, Q.; Liu, C.; Ouyang, C.; Domènech, G.; Yang, F.; Dai, L. Some considerations on the use of numerical methods to simulate past landslides and possible new failures: The case of the recent Xinmo landslide (Sichuan, China). Landslides 2018, 15, 1359–1375. [Google Scholar] [CrossRef]
- Ouyang, C.; An, H.; Zhou, S.; Wang, Z.; Su, P.; Wang, D.; Cheng, D.; She, J. Insights from the failure and dynamic characteristics of two sequential landslides at Baige village along the Jinsha River, China. Landslides 2019, 16, 1397–1414. [Google Scholar] [CrossRef]
- Lin, M.L.; Chen, Y.C.; Tseng, Y.H.; Chang, K.J.; Wang, K.L. Investigation of Geological Structures Using UAV Lidar and Its Effects on the Failure Mechanism of Deep-Seated Landslide in Lantai Area, Taiwan. Appl. Sci. 2021, 11, 10052. [Google Scholar] [CrossRef]
- Ali, S.; Biermanns, P.; Haider, R.; Reicherter, K. Landslide susceptibility mapping by using GIS along the China–Pakistan economic corridor (Karakoram Highway), Pakistan. Nat. Hazards Earth Syst. Sci 2018, 11, 131–148. [Google Scholar]
- Meten, M.; PrakashBhandary, N.; Yatabe, R. Effect of landslide factor combinations on the prediction accuracy of landslide susceptibility maps in the Blue Nile Gorge of Central Ethiopia. Geoenviron. Disasters 2015, 2, 9. [Google Scholar] [CrossRef]
- Vojteková, J.; Vojtek, M. Assessment of landslide susceptibility at a local spatial scale applying the multi-criteria analysis and GIS: A case study from Slovakia. Geomat. Nat. Hazards Risk 2020, 11, 131–148. [Google Scholar] [CrossRef]
- Kakavas, M.P.; Nikolakopoulos, K.G. Digital elevation models of rockfalls and landslides: A review and meta-analysis. Geosciences 2021, 11, 256. [Google Scholar] [CrossRef]
- Tempa, K.; Peljor, K.; Wangdi, S.; Ghalley, R.; Jamtsho, K.; Ghalley, S.; Pradhan, P. UAV technique to localize landslide susceptibility and mitigation proposal: A case of Rinchending Goenpa landslide in Bhutan. Nat. Hazards Res. 2021, 1, 171–186. [Google Scholar] [CrossRef]
- Bhatt, B.P.; Awasthi, K.D.; Heyojoo, B.P.; Silwal, T.; Kafle, G. Using geographic information system and analytical hierarchy process in landslide hazard zonation. Appl. Ecol. Environ. Sci. 2013, 1, 14–22. [Google Scholar] [CrossRef][Green Version]
- Song, Y.; Gong, J.; Gao, S.; Wang, D.; Cui, T.; Li, Y.; Wei, B. Susceptibility assessment of earthquake-induced landslides using Bayesian network: A case study in Beichuan, China. Comput. Geosci. 2012, 42, 189–199. [Google Scholar] [CrossRef]
- Chae, B.G.; Park, H.J.; Catani, F.; Simoni, A.; Berti, M. Landslide prediction, monitoring and early warning: A concise review of state-of-the-art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- Ma, S.; Wei, J.; Xu, C.; Shao, X.; Xu, S.; Chai, S.; Cui, Y. UAV survey and numerical modeling of loess landslides: An example from Zaoling, southern Shanxi Province, China. Nat. Hazards 2020, 104, 1125–1140. [Google Scholar] [CrossRef]
- Huang, A.B.; Lee, J.T.; Ho, Y.T.; Chiu, Y.F.; Cheng, S.Y. Stability monitoring of rainfall-induced deep landslides through pore pressure profile measurements. Soils Found. 2012, 52, 737–747. [Google Scholar] [CrossRef]
- Toll, D.; Lourenço, S.; Mendes, J.; Gallipoli, D.; Evans, F.; Augarde, C.; Cui, Y.J.; Tang, A.; Rojas, J.; Pagano, L.; et al. Soil Suction Monitoring for Landslides and Slopes; Geological Society of London: London, UK, 2011. [Google Scholar] [CrossRef]
- Sestras, P.; Bilasco, S.; Rosca, S.; Dudic, B.; Hysa, A.; Spalevic, V. Geodetic and UAV monitoring in the sustainable management of shalloSw landslides and erosion of a susceptible urban environment. Remote Sens. 2021, 13, 385. [Google Scholar] [CrossRef]
- Mazzanti, P.; Caporossi, P.; Brunetti, A.; Mohammadi, F.I.; Bozzano, F. Short-term geomorphological evolution of the Poggio Baldi landslide upper scarp via 3D change detection. Landslides 2021, 18, 2367–2381. [Google Scholar] [CrossRef]
- Cai, J.; Wang, C.; Zhang, L. Analysis of Mass Wasting Processes in the Slumgullion Landslide Using Multi-Track Time-Series UAVSAR Images. Remote Sens. 2023, 15, 4746. [Google Scholar] [CrossRef]
- Hu, X.; Bürgmann, R.; Fielding, E.J.; Lee, H. Internal kinematics of the Slumgullion landslide (USA) from high-resolution UAVSAR InSAR data. Remote Sens. Environ. 2020, 251, 112057. [Google Scholar] [CrossRef]
- Molan, Y.E.; Lohman, R.B. A Pattern-Based Strategy for InSAR Phase Unwrapping and Application to Two Landslides in Colorado. J. Geophys. Res. Solid Earth 2023, 128, e2022JB025761. [Google Scholar] [CrossRef]
- Chowdhury, R.; Zhang, S. Tension cracks and slope failure. In Slope Stability Engineering Developments and Applications: Proceedings of the International Conference on Slope Stability Organized by the Institution of Civil Engineers and Held on the Isle of Wight on 15–18 April 1991; Thomas Telford Publishing: London, UK, 1991; pp. 27–32. [Google Scholar] [CrossRef]
- Khattak, G.A.; Owen, L.A.; Kamp, U.; Harp, E.L. Evolution of earthquake-triggered landslides in the Kashmir Himalaya, northern Pakistan. Geomorphology 2010, 115, 102–108. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.P.; Kerle, N.; Niethammer, U.; Rothmund, S. Image-based mapping of surface fissures for the investigation of landslide dynamics. Geomorphology 2013, 186, 12–27. [Google Scholar] [CrossRef]
- Xu, L.; Dai, F.; Tham, L.; Zhou, Y.; Wu, C. Investigating landslide-related cracks along the edge of two loess platforms in northwest China. Earth Surf. Process. Landf. 2012, 37, 1023–1033. [Google Scholar] [CrossRef]
- Tang, H.; Wasowski, J.; Juang, C.H. Geohazards in the three Gorges Reservoir Area, China–Lessons learned from decades of research. Eng. Geol. 2019, 261, 105267. [Google Scholar] [CrossRef]
- Wang, H.; Nie, D.; Tuo, X.; Zhong, Y. Research on crack monitoring at the trailing edge of landslides based on image processing. Landslides 2020, 17, 985–1007. [Google Scholar] [CrossRef]
- Vivaldi, V.; Bordoni, M.; Mineo, S.; Crozi, M.; Pappalardo, G.; Meisina, C. Airborne combined photogrammetry—Infrared thermography applied to landslide remote monitoring. Landslides 2023, 20, 297–313. [Google Scholar] [CrossRef]
- Baroň, I.; Bečkovskỳ, D.; Míča, L. Application of infrared thermography for mapping open fractures in deep-seated rockslides and unstable cliffs. Landslides 2014, 11, 15–27. [Google Scholar] [CrossRef]
- Iwaszenko, S.; Kalisz, P.; Słota, M.; Rudzki, A. Detection of natural gas leakages using a laser-based methane sensor and uav. Remote Sens. 2021, 13, 510. [Google Scholar] [CrossRef]
- Gómez, C.; Green, D.R. Small unmanned airborne systems to support oil and gas pipeline monitoring and mapping. Arab. J. Geosci. 2017, 10, 202. [Google Scholar] [CrossRef]
- Marinos, V.; Stoumpos, G.; Papazachos, C. Landslide hazard and risk assessment for a natural gas pipeline project: The case of the Trans Adriatic Pipeline, Albania Section. Geosciences 2019, 9, 61. [Google Scholar] [CrossRef]
- Nyman, D.J.; Lee, E.M.; Audibert, J.M. Mitigating geohazards for international pipeline projects: Challenges and lessons learned. In Proceedings of the 2008 7th International Pipeline Conference, Calgary, AB, Canada, 29 September–3 October 2008; Volume 48593, pp. 639–648. [Google Scholar] [CrossRef]
- DJIEnterprise. DJI Records More Than 1000 People Rescued by Drones Globally. 2023. Available online: https://www.dji.com/newsroom/news/dji-records-more-than-1000-people-rescued-by-drones-globally (accessed on 15 January 2024).
- Zhou, J.w.; Jiang, N.; Li, H.b. Automatic discontinuity identification and quantitative monitoring of unstable blocks using terrestrial laser scanning in large landslide during emergency disposal. Landslides 2023. [Google Scholar] [CrossRef]
- He, K.; Liu, B.; Hu, X. Preliminary reports of a catastrophic landslide occurred on August 21, 2020, in Hanyuan County, Sichuan Province, China. Landslides 2021, 18, 503–507. [Google Scholar] [CrossRef]
- Guo, F.Y.; Meng, X.M.; Qi, T.J.; Dijkstra, T.; Thorkildsen, J.K.; Yue, D.X.; Chen, G.; Zhang, Y.; Dou, X.D.; Shi, P.Q. Rapid onset hazards, fault-controlled landslides and multi-method emergency decision-making. J. Mt. Sci. 2022, 19, 1357–1369. [Google Scholar] [CrossRef]
- Jiang, N.; Li, C.j.; Li, H.b.; Zhou, Z.d.; Lu, G.d.; Zhou, J.w. Preliminary analysis of a landslide-dammed lake induced by two consecutive earthquakes on June 1, 2022, Sichuan Province, China. Landslides 2022, 19, 2535–2538. [Google Scholar] [CrossRef]
- Liu, B.; He, K.; Han, M.; Hu, X.; Ma, G.; Wu, M. Application of UAV and GB-SAR in Mechanism Research and Monitoring of Zhonghaicun Landslide in Southwest China. Remote Sens. 2021, 13, 1653. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, H.; Hongjian, L.; Li, W.; Su, L.; He, W.; Zeng, L.; Qin, H.; Dhital, M.R. Emergency response to the reactivated Aniangzhai landslide resulting from a rainstorm-triggered debris flow, Sichuan Province, China. Landslides 2021, 18, 1115–1130. [Google Scholar] [CrossRef]
- DUKOWITZ, Z. Landslide in Norway Leads to Largest European Drone Operation Ever, 200+ Hours of Flight Time Recorded. 2021. Available online: https://uavcoach.com/ask-landslide-drone-operation/ (accessed on 15 January 2024).
- Enterprise, D. Drones Were Critical for Search and Rescue during Norway’s Biggest Landslide Disaster. 2021. Available online: https://enterprise-insights.dji.com/blog/let-drones-search-so-you-can-rescue-norway-landslide-m300 (accessed on 15 January 2024).
- PIX4Dmapper. Drone Mapping Saves Lives in Landslides. 2017. Available online: https://www.pix4d.com/blog/drone-mapping-saves-lives-rescuav-landslide-in-colombia/ (accessed on 15 January 2024).
- Kangunde, V.; Jamisola, R.S.; Theophilus, E.K. A review on drones controlled in real-time. Int. J. Dyn. Control 2021, 9, 1832–1846. [Google Scholar] [CrossRef]
- Jiang, N.; Li, H.B.; Li, C.J.; Xiao, H.X.; Zhou, J.W. A Fusion Method Using Terrestrial Laser Scanning and Unmanned Aerial Vehicle Photogrammetry for Landslide Deformation Monitoring Under Complex Terrain Conditions. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4707214. [Google Scholar] [CrossRef]
- Yun, L.; Zhang, X.; Zheng, Y.; Wang, D.; Hua, L. Enhance the Accuracy of Landslide Detection in UAV Images Using an Improved Mask R-CNN Model: A Case Study of Sanming, China. Sensors 2023, 23, 4287. [Google Scholar] [CrossRef] [PubMed]
- Nota, E.; Nijland, W.; de Haas, T. Improving UAV-SfM time-series accuracy by co-alignment and contributions of ground control or RTK positioning. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102772. [Google Scholar] [CrossRef]
- Rodriguez-Caballero, E.; Rodriguez-Lozano, B.; Segura-Tejada, R.; Blanco-Sacristán, J.; Cantón, Y. Landslides on dry badlands: UAV images to identify the drivers controlling their unexpected occurrence on vegetated hillslopes. J. Arid. Environ. 2021, 187, 104434. [Google Scholar] [CrossRef]
- Büschelberger, M.; Wilk, J.; Hergarten, S.; Preusser, F. Size–frequency distribution of shallow landslides in the Black Forest, Germany. Earth Surf. Process. Landf. 2022, 47, 179–192. [Google Scholar] [CrossRef]
- Dille, A.; Kervyn, F.; Mugaruka Bibentyo, T.; Delvaux, D.; Ganza, G.B.; Ilombe Mawe, G.; Kalikone Buzera, C.; Safari Nakito, E.; Moeyersons, J.; Monsieurs, E.; et al. Causes and triggers of deep-seated hillslope instability in the tropics – Insights from a 60-year record of Ikoma landslide (DR Congo). Geomorphology 2019, 345, 106835. [Google Scholar] [CrossRef]
- Koutalakis, P.D.; Tzoraki, O.A.; Prazioutis, G.I.; Gkiatas, G.T.; Zaimes, G.N. Can Drones Map Earth Cracks? Landslide Measurements in North Greece Using UAV Photogrammetry for Nature-Based Solutions. Sustainability 2021, 13, 4697. [Google Scholar] [CrossRef]
- Șandric, I.; Irimia, R.; Ilinca, V.; Chițu, Z.; Gheuca, I. Using UAV Time Series to Estimate Landslides’ Kinematics Uncertainties, Case Study: Chirlești Earthflow, Romania. Remote Sens. 2023, 15, 2161. [Google Scholar] [CrossRef]
- Xu, Q.; Li, W.l.; Ju, Y.z.; Dong, X.j.; Peng, D.l. Multitemporal UAV-based photogrammetry for landslide detection and monitoring in a large area: A case study in the Heifangtai terrace in the Loess Plateau of China. J. Mt. Sci. 2020, 17, 1826–1839. [Google Scholar] [CrossRef]
- Conforti, M.; Mercuri, M.; Borrelli, L. Morphological Changes Detection of a Large Earthflow Using Archived Images, LiDAR-Derived DTM, and UAV-Based Remote Sensing. Remote Sens. 2020, 13, 120. [Google Scholar] [CrossRef]
- Zárate, B.A.; El Hamdouni, R.; Fernández Del Castillo, T. Characterization and Analysis of Landslide Evolution in Intramountain Areas in Loja (Ecuador) Using RPAS Photogrammetric Products. Remote Sens. 2023, 15, 3860. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Yuan, G.; Song, L.; Zhang, H. Unmanned Aerial Vehicles (UAVs) in Landslide Investigation and Monitoring: A Review. Drones 2024, 8, 30. https://doi.org/10.3390/drones8010030
Sun J, Yuan G, Song L, Zhang H. Unmanned Aerial Vehicles (UAVs) in Landslide Investigation and Monitoring: A Review. Drones. 2024; 8(1):30. https://doi.org/10.3390/drones8010030
Chicago/Turabian StyleSun, Jianwei, Guoqin Yuan, Laiyun Song, and Hongwen Zhang. 2024. "Unmanned Aerial Vehicles (UAVs) in Landslide Investigation and Monitoring: A Review" Drones 8, no. 1: 30. https://doi.org/10.3390/drones8010030
APA StyleSun, J., Yuan, G., Song, L., & Zhang, H. (2024). Unmanned Aerial Vehicles (UAVs) in Landslide Investigation and Monitoring: A Review. Drones, 8(1), 30. https://doi.org/10.3390/drones8010030