
Multi-Robot Coverage Path Planning for the Inspection of Offshore Wind Farms: A Review



Abstract
:1. Introduction
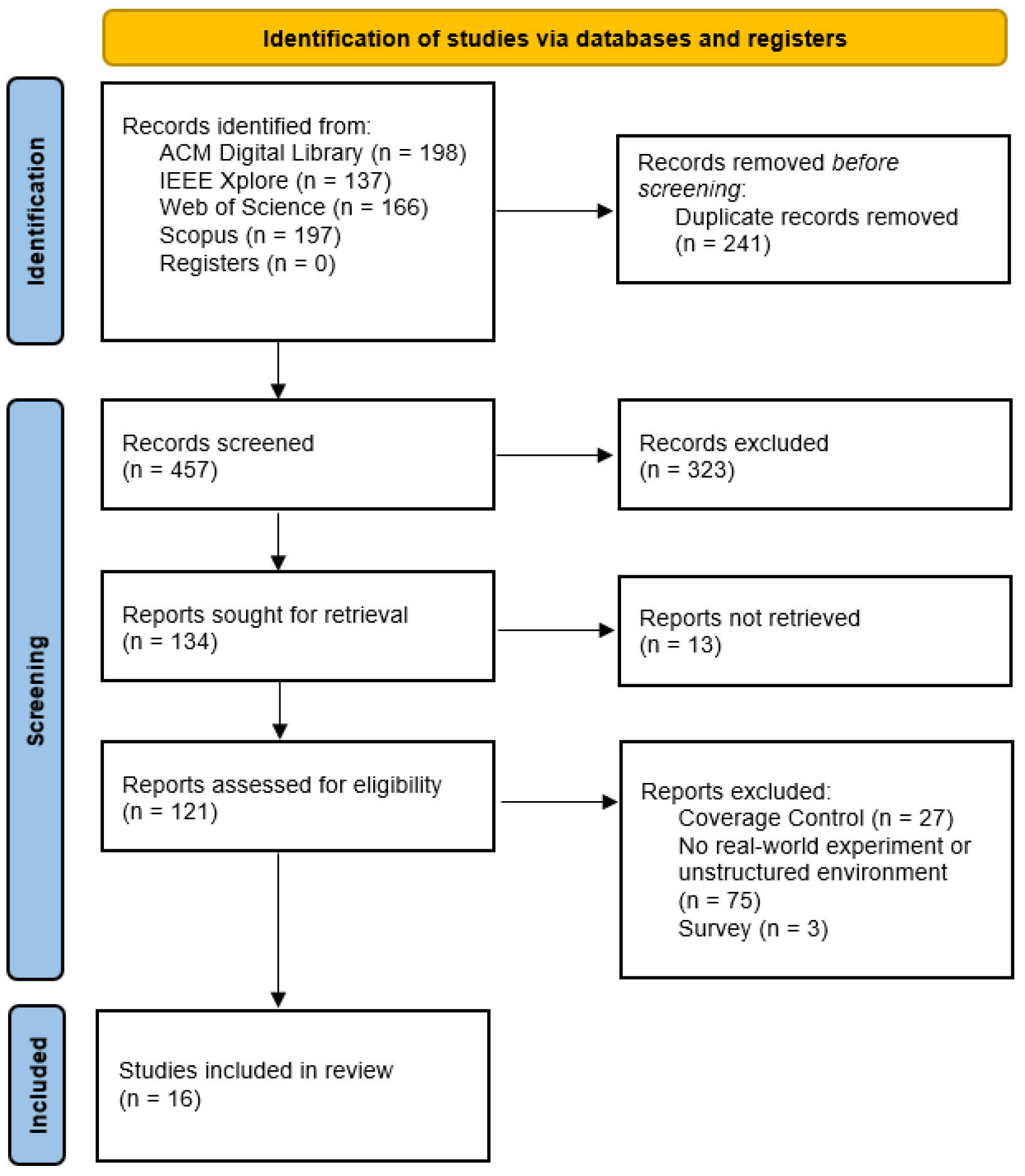
2. Methodology
3. Analysis
4. Environmental Models
4.1. Geometric Map
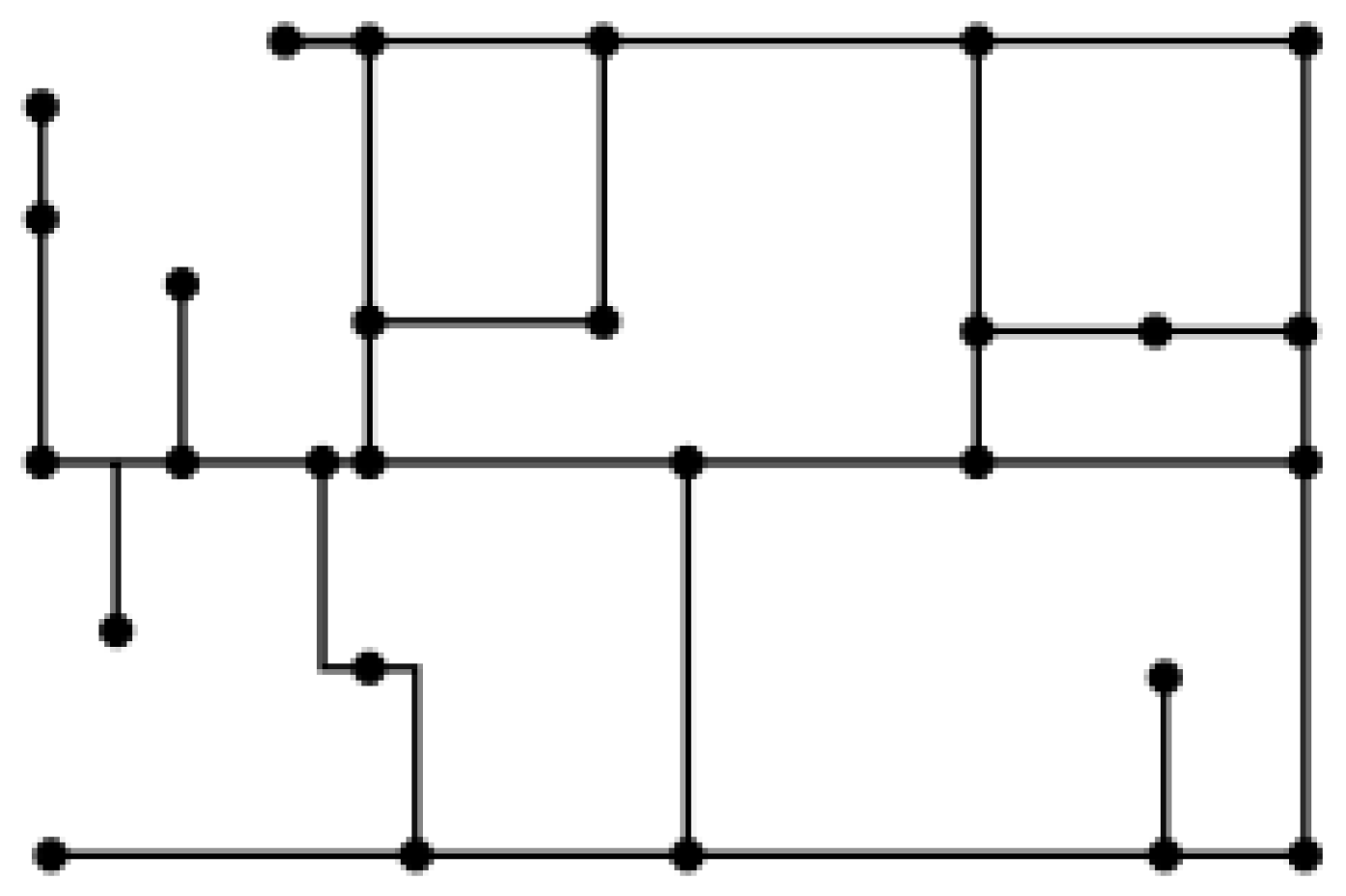
4.2. Topological Map
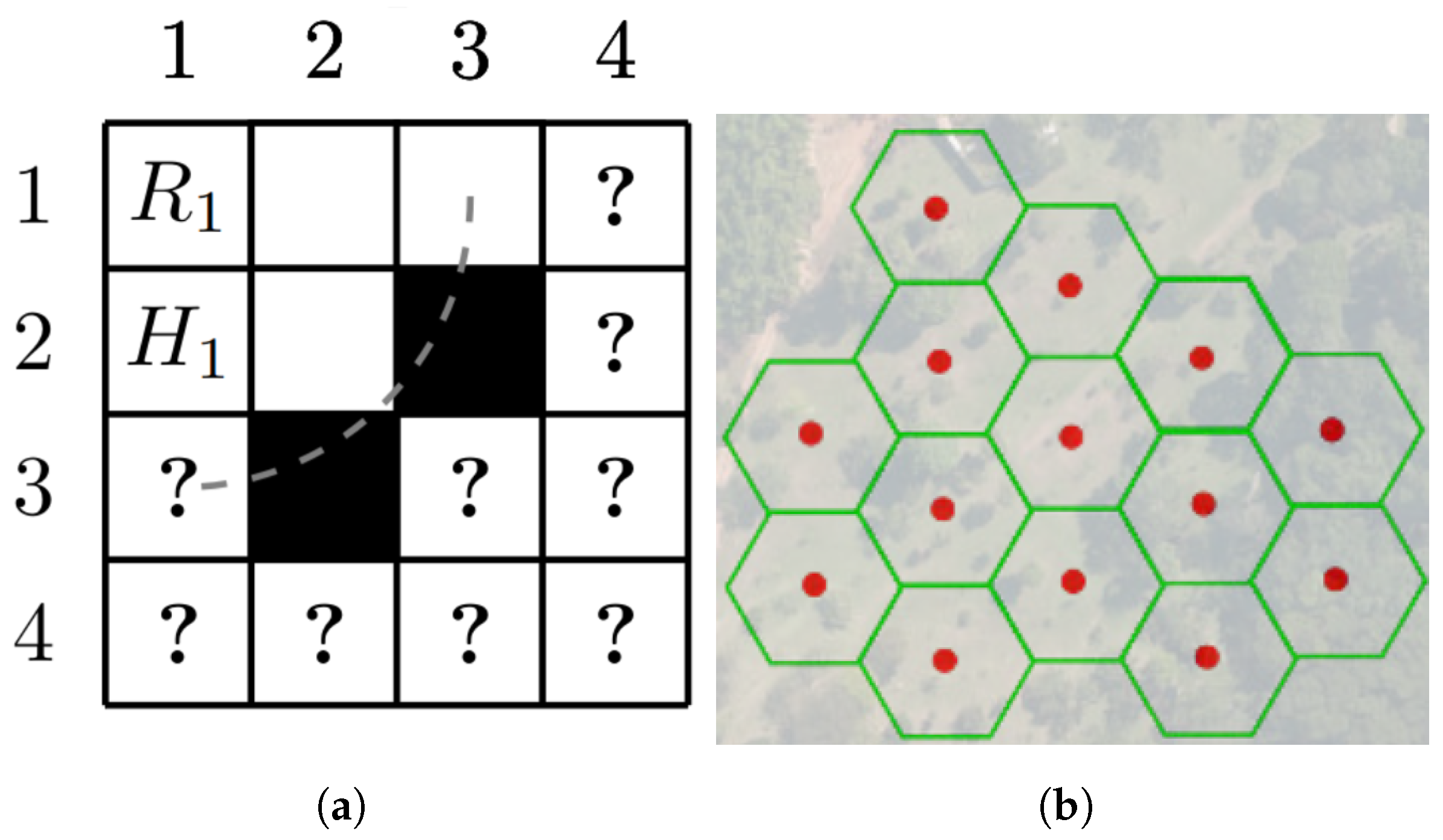
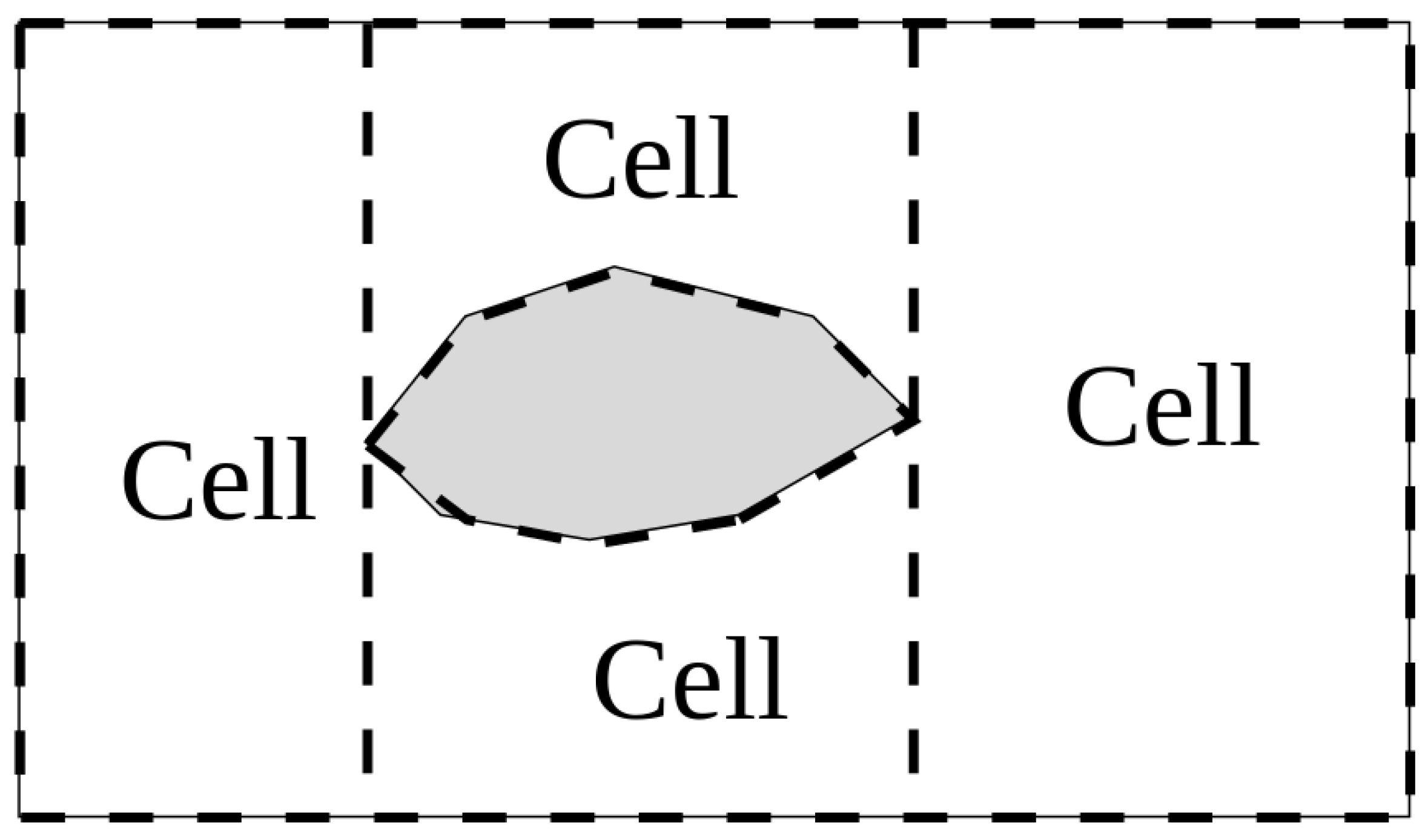
4.3. Grid Map
4.4. Occupancy Grid
4.5. Voxel-Based Mapping
4.6. Cost Maps
4.7. Discussion
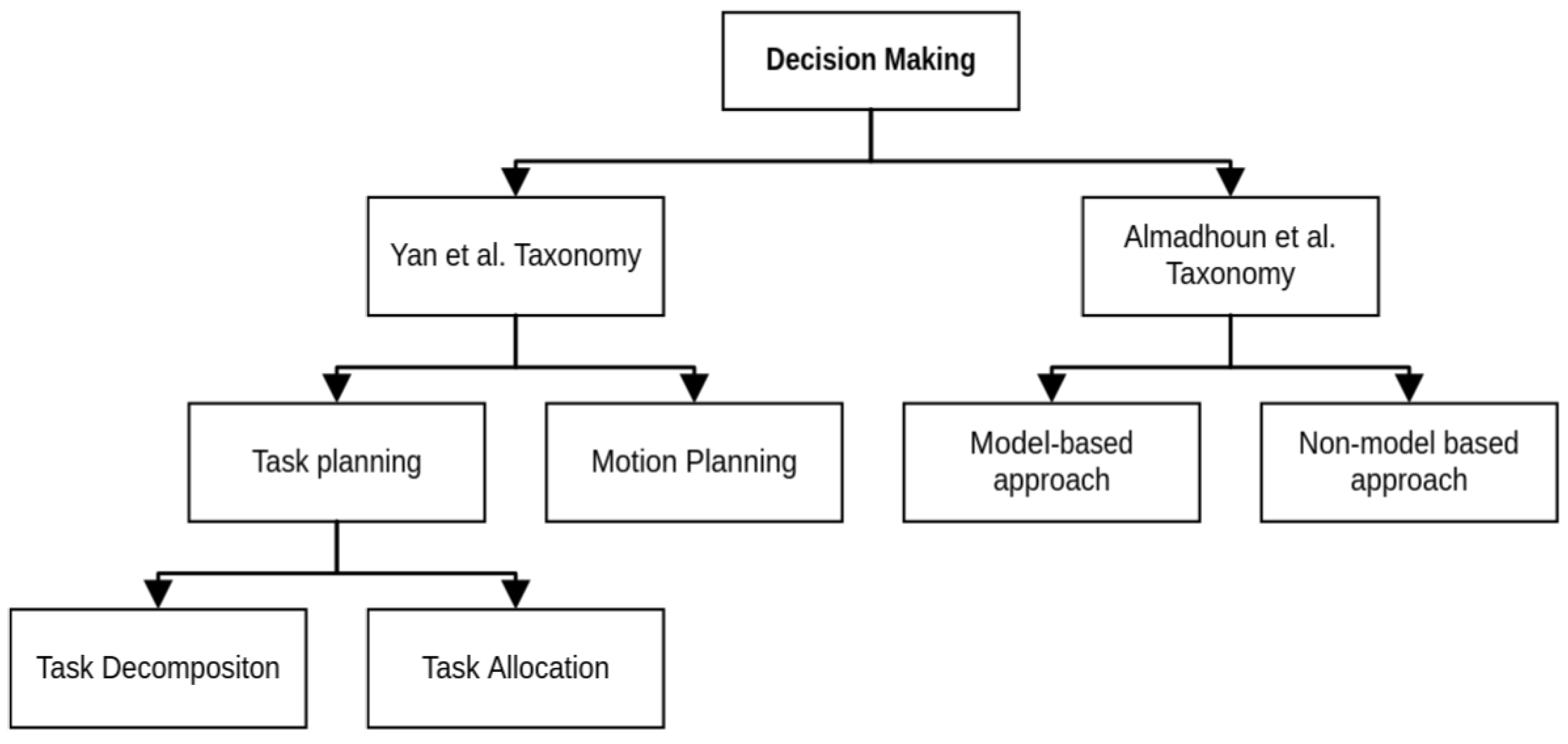
5. Decision Making
5.1. A Priori Knowledge
5.1.1. Non-Model-Based Approaches
5.1.2. Model-Based Approaches
5.2. Planning
5.2.1. Task Planning
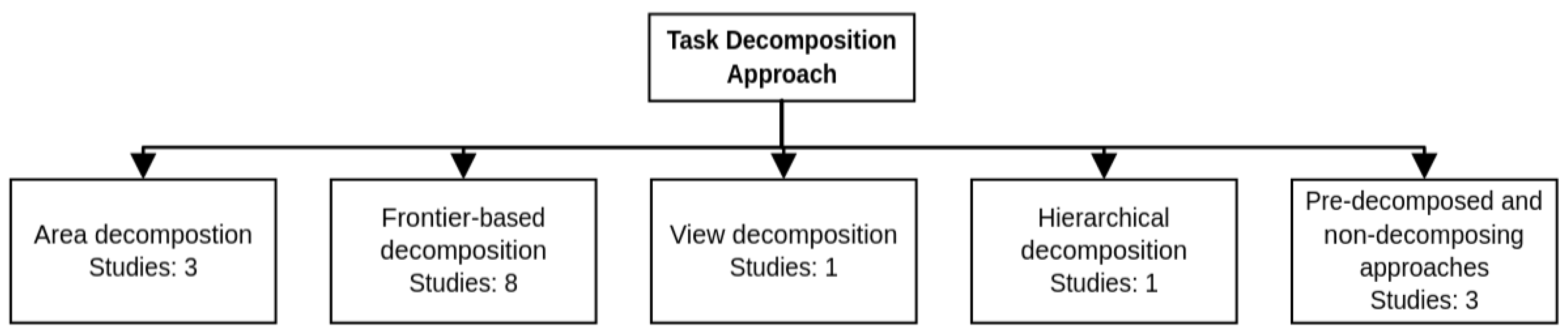
5.2.1.1. Area Decomposition
5.2.1.2. Frontier-Based Decomposition
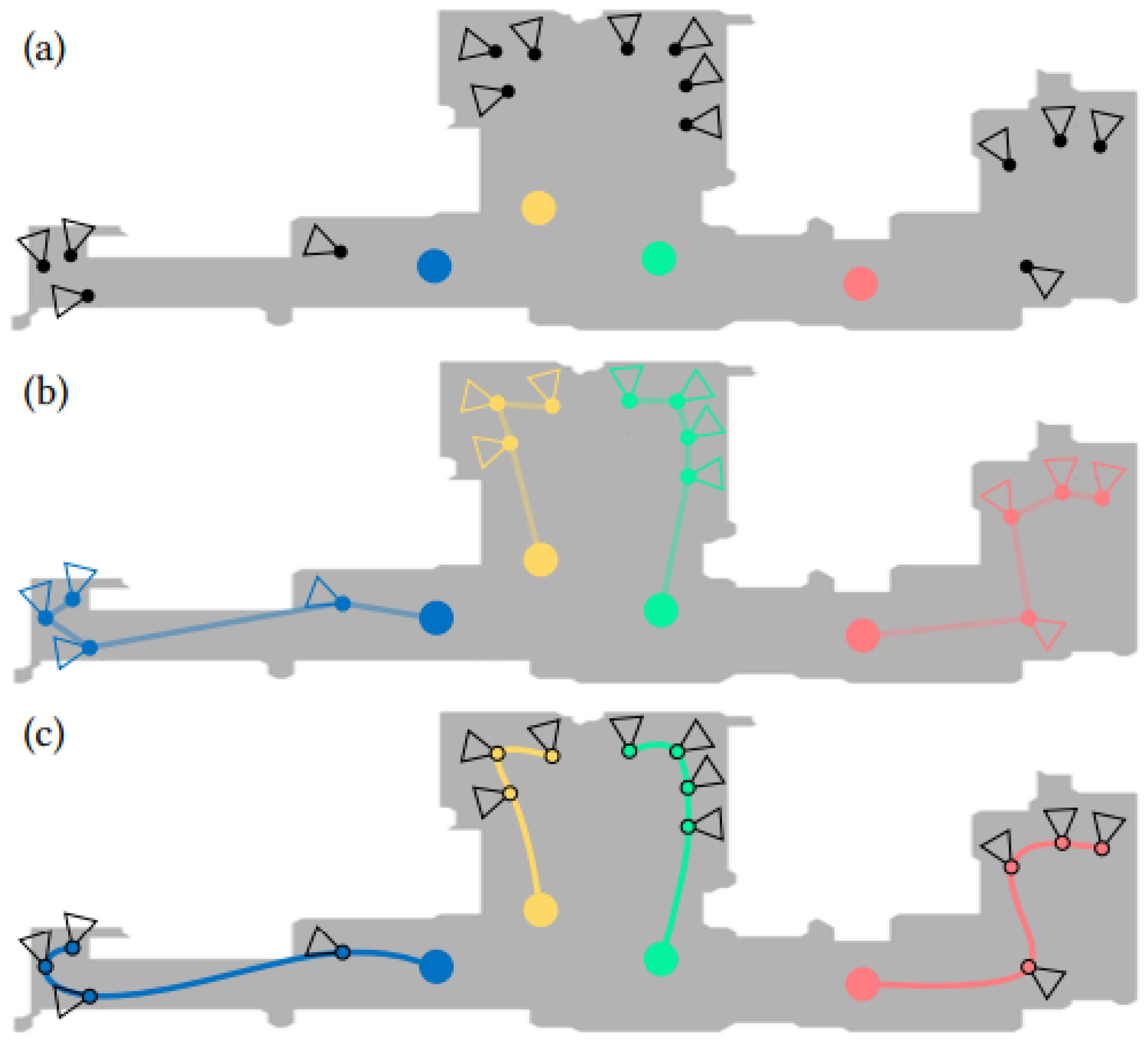
5.2.1.3. View Decomposition
5.2.1.4. Hierarchical Decomposition
5.2.1.5. Pre-Decomposed and Non-Decomposing Approaches
5.2.2. Motion Planning
5.3. Discussion
6. Coordination
6.1. Collaboration in Decentralised Planning
6.2. Communication
6.3. Fault Tolerance
6.4. Discussion
7. Future Work
7.1. Task Decomposition with Areas of Interest
7.2. Limited Knowledge Approach
7.3. Dynamic Tasks
7.4. Limited Communication
7.5. Heterogeneous Sensing/Locomotion Capabilities
7.6. UAV Structural Coverage
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- UKRI. Harnessing Offshore Wind. 2021. Available online: https://www.ukri.org/news-and-events/responding-to-climate-change/topical-stories/harnessing-offshore-wind/ (accessed on 13 November 2023).
- GWEC Global Offshore Wind Report 2022. Available online: https://gwec.net/wp-content/uploads/2022/06/GWEC-Global-Offshore-Wind-Report-2022.pdf (accessed on 13 November 2023).
- Desalegn, B.; Gebeyehu, D.; Tamrat, B.; Tadiwose, T.; Lata, A. Onshore versus offshore wind power trends and recent study practices in modeling of wind turbines’ life-cycle impact assessments. Clean. Eng. Technol. 2023, 17, 100691. [Google Scholar] [CrossRef]
- ORE Catapult. Offshore Wind Operations & Maintenance: A £9bn per Year Opportunity by 2030 for the UK to Seize. 2021. Available online: https://ore.catapult.org.uk/?orecatapultreports=offshore-wind-operations-maintenance-9bn-year-opportunity-2030-uk-seize (accessed on 13 November 2023).
- Fenstermaker. Wind Turbine Drone Inspections. 2022. Available online: https://blog.fenstermaker.com/wind-turbine-drone-inspections/ (accessed on 13 November 2023).
- ECA Group. Windfarm Inspection and Monitoring by Rov. Available online: https://www.ecagroup.com/en/solutions/windfarm-inspection-and-monitoring-rov (accessed on 13 November 2023).
- Film-Ocean. Renewables-Film-Ocean. Available online: https://www.film-ocean.com/renewables (accessed on 13 November 2023).
- Balmore Inspection Services. Offshore Wind Farm Underwater Drone Survey Services across Scotland. 2021. Available online: https://balmoreuav.co.uk/offshore-wind-farm-inspection/ (accessed on 13 November 2023).
- Atlantas Marine. Offshore Inspection Services. 2022. Available online: https://www.atlantasmarine.com/offshore-inspection-services/ (accessed on 13 November 2023).
- Systems, B.A. A.IKANBILIS-Designed for Cost Effective Underwater Inspections. Available online: https://beex.sg/hauv (accessed on 13 November 2023).
- Aero Enterprise. Inspection Service at Offshore Wind Turbines. Available online: https://aero-enterprise.com/services/offshore-wind-turbines/ (accessed on 13 November 2023).
- Force Technology. Drone Inspection of Wind Turbines-on- and Offshore. Available online: https://forcetechnology.com/en/services/inspection/drone-inspection-of-wind-turbines-onshore-and-offshore (accessed on 13 November 2023).
- Iberdrola. We Are Committed to Using Drones to Inspect and Maintain Wind Farms. Available online: https://www.iberdrola.com/innovation/drones-wind-farms (accessed on 13 November 2023).
- INNVOTEK. Amphibian™. 2022. Available online: https://innvotek.com/amphibian/ (accessed on 13 November 2023).
- ROBOTICS ROPE. Leading Edge Repair. 2021. Available online: https://roperobotics.com/index.php/leading-edge-repair/ (accessed on 13 November 2023).
- Nordin, M.H.; Sharma, S.; Khan, A.; Gianni, M.; Rajendran, S.; Sutton, R. Collaborative Unmanned Vehicles for Inspection, Maintenance, and Repairs of Offshore Wind Turbines. Drones 2022, 6, 137. [Google Scholar] [CrossRef]
- Parker, L.E.; Rus, D.; Sukhatme, G.S. Multiple mobile robot systems. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1335–1384. [Google Scholar]
- Franko, J.; Du, S.; Kallweit, S.; Duelberg, E.; Engemann, H. Design of a multi-robot system for wind turbine maintenance. Energies 2020, 13, 2552. [Google Scholar] [CrossRef]
- Bernardini, S.; Jovan, F.; Jiang, Z.; Watson, S.; Weightman, A.; Moradi, P.; Richardson, T.; Sadeghian, R.; Sareh, S. A multi-robot platform for the autonomous operation and maintenance of offshore wind farms. Auton. Agents Multi-Agent Syst. (AAMAS) 2020, 2020, 1696–1700. [Google Scholar]
- Jovan, F.; Bernardini, S. Multi-Robot Coordination in Operations and Maintenance of Off Shore Wind Farms with Temporal Planning. In Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS2021), Guangzhou, China, 2–13 August 2021; pp. 2–13. [Google Scholar]
- Freda, L.; Gianni, M.; Pirri, F.; Gawel, A.; Dubé, R.; Siegwart, R.; Cadena, C. 3D multi-robot patrolling with a two-level coordination strategy. Auton. Robot. 2019, 43, 1747–1779. [Google Scholar] [CrossRef]
- Jiang, Z.; Jovan, F.; Moradi, P.; Richardson, T.; Bernardini, S.; Watson, S.; Weightman, A.; Hine, D. A multirobot system for autonomous deployment and recovery of a blade crawler for operations and maintenance of offshore wind turbine blades. J. Field Robot. 2023, 40, 73–93. [Google Scholar] [CrossRef]
- Fan, Y.; Ma, J.; Wang, G.; Li, T. Design of a heterogeneous marsupial robotic system composed of an USV and an UAV. In Proceedings of the 2016 Eighth International Conference on Advanced Computational Intelligence (ICACI), Chiang Mai, Thailand, 14–16 February 2016; pp. 395–399. [Google Scholar] [CrossRef]
- Mišković, N.; Bogdan, S.; Nad, D.; Mandić, F.; Orsag, M.; Haus, T. Unmanned marsupial sea-air system for object recovery. In Proceedings of the 22nd Mediterranean Conference on Control and Automation, Palermo, Italy, 16–19 June 2014; pp. 740–745. [Google Scholar] [CrossRef]
- Zhang, H.; He, Y.; Li, D.; Gu, F.; Li, Q.; Zhang, M.; Di, C.; Chu, L.; Chen, B.; Hu, Y. Marine UAV–USV marsupial platform: System and recovery technic verification. Appl. Sci. 2020, 10, 1583. [Google Scholar] [CrossRef]
- ORE Catapult. UAV Approaches to Wind Turbine Inspection. 2019. Available online: https://ore.catapult.org.uk/wp-content/uploads/2019/03/Cyberhawks-Approach-to-UAV-Inspection-Craig-Stout-ORE-Catapult.pdf (accessed on 13 November 2023).
- Exo Inc. Wind Turbine Structural Tower Inspection. Available online: https://exoinc.com/wind-turbine-structural-tower-inspection (accessed on 13 November 2023).
- BVG Associates. Guide to a Floating Offshore Wind Farm. 2023. Available online: https://guidetofloatingoffshorewind.com/ (accessed on 13 November 2023).
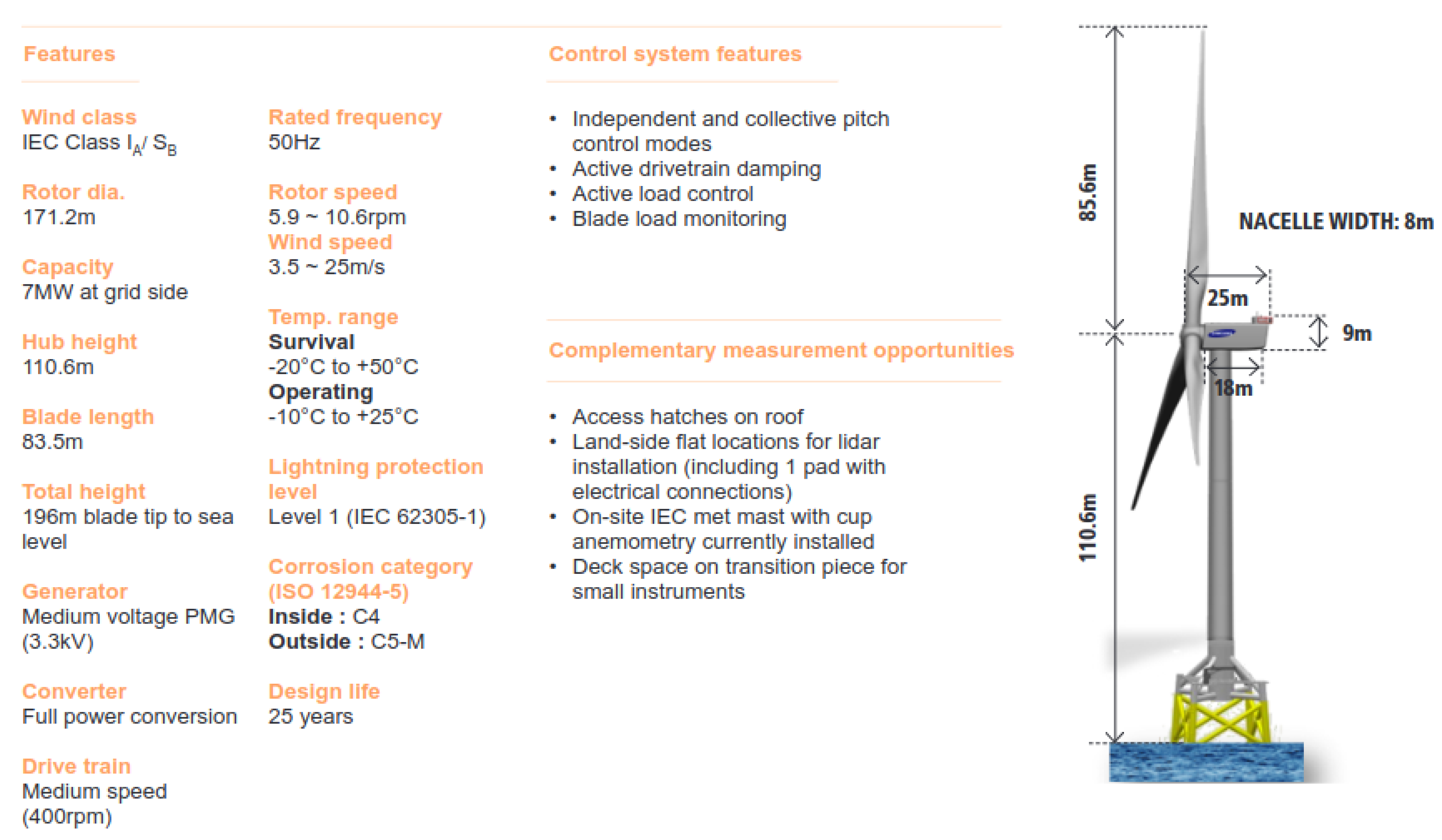
- ORE Catapult. Levenmouth 7MW Demonstration Offshore Wind Turbine. 2018. Available online: https://ore.catapult.org.uk/wp-content/uploads/2018/08/Catapult-Specification-and-Service-Summary-Sheet-Levenmouth-turbine.pdf (accessed on 13 November 2023).
- Choset, H. Coverage of known spaces: The boustrophedon cellular decomposition. Auton. Robot. 2000, 9, 247–253. [Google Scholar] [CrossRef]
- Arkin, E.M.; Fekete, S.P.; Mitchell, J.S. Approximation algorithms for lawn mowing and milling. Comput. Geom. 2000, 17, 25–50. [Google Scholar] [CrossRef]
- Ulrich, I.; Mondada, F.; Nicoud, J.D. Autonomous vacuum cleaner. Robot. Auton. Syst. 1997, 19, 233–245. [Google Scholar] [CrossRef]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Dias, J.; Cai, G. A survey on inspecting structures using robotic systems. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416663664. [Google Scholar] [CrossRef]
- Peters, M.D.; Godfrey, C.; McInerney, P.; Munn, Z.; Tricco, A.C.; Khalil, H. Scoping reviews. Joanna Briggs Inst. Rev. Man. 2017, 2015, 1–24. [Google Scholar]
- Tricco, A.; Lillie, E.; Zarin, W.; O’Brien, K.; Colquhoun, H.; Levac, D.; Moher, D.; Peters, M.; Horsley, T.; Weeks, L.; et al. PRISMA extension for scoping reviews (PRISMA-ScR): Checklist and explanation. Ann. Intern. Med. 2018, 169, 467–473. [Google Scholar] [CrossRef]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A survey and analysis of multi-robot coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Farinelli, A.; Iocchi, L.; Nardi, D. An analysis of coordination in multi-robot systems. In Proceedings of the 2003 IEEE International Conference on Systems, Man and Cybernetics, Washington, DC, USA, 17 November 2003; Volume 2, pp. 1487–1492. [Google Scholar]
- McGraw, G.A.; Groves, P.D.; Ashman, B.W. Robust positioning in the presence of multipath and NLOS GNSS signals. In Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; IEEE: Piscataway, NJ, USA, 2020; Volume 1, pp. 551–589. [Google Scholar]
- Burgard, W.; Herbert, M.; Bennewitz, M. World Modeling. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Kröger, T., Eds.; Springer: Oxford, UK, 2008; Chapter 45; pp. 1136–1152. [Google Scholar]
- Ball, D.; Ross, P.; English, A.; Patten, T.; Upcroft, B.; Fitch, R.; Sukkarieh, S.; Wyeth, G.; Corke, P. Robotics for sustainable broad-acre agriculture. Springer Tracts Adv. Robot. 2015, 105, 439–453. [Google Scholar] [CrossRef]
- Masehian, E.; Jannati, M.; Hekmatfar, T. Cooperative mapping of unknown environments by multiple heterogeneous mobile robots with limited sensing. Robot. Auton. Syst. 2017, 87, 188–218. [Google Scholar] [CrossRef]
- Karapetyan, N.; Moulton, J.; Lewis, J.S.; Quattrini Li, A.; O’Kane, J.M.; Rekleitis, I. Multi-robot Dubins Coverage with Autonomous Surface Vehicles. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2373–2379. [Google Scholar] [CrossRef]
- Tang, J.; Gao, Y.; Lam, T.L. Learning to Coordinate for a Worker-Station Multi-Robot System in Planar Coverage Tasks. IEEE Robot. Autom. Lett. 2022, 7, 12315–12322. [Google Scholar] [CrossRef]
- Kim, M.; Gupta, R.; Sentis, L. CONCERTS: Coverage Competency-Based Target Search for Heterogeneous Robot Teams. Appl. Sci. 2022, 12, 8649. [Google Scholar] [CrossRef]
- Kalde, N.; Simonin, O.; Charpillet, F. Comparison of classical and interactive multi-robot exploration strategies in populated environments. Acta Polytech. 2015, 55, 154–161. [Google Scholar] [CrossRef]
- Song, J.; Gupta, S.; Hare, J. Game-theoretic cooperative coverage using autonomous vehicles. In Proceedings of the 2014 Oceans-St. John’s, OCEANS 2014, St. John’s, NL, Canada, 14–19 September 2014. [Google Scholar] [CrossRef]
- Perez-imaz, H.I.A.; Rezeck, P.A.F.; Macharet, D.G.; Campos, M.F.M. Multi-robot 3D coverage path planning for First Responders teams. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 1374–1379. [Google Scholar] [CrossRef]
- Sharma, S.; Shukla, A.; Tiwari, R. Multi robot area exploration using nature inspired algorithm. Biol. Inspired Cogn. Archit. 2016, 18, 80–94. [Google Scholar] [CrossRef]
- Zhang, P.; Xu, S.; Zhang, W.; Dong, W. A Cooperative Aerial Inspection System with Continuable Charging Strategy. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 770–777. [Google Scholar] [CrossRef]
- Yu, C.; Yang, X.; Gao, J.; Chen, J.; Li, Y.; Liu, J.; Xiang, Y.; Huang, R.; Yang, H.; Wu, Y.; et al. Asynchronous Multi-Agent Reinforcement Learning for Efficient Real-Time Multi-Robot Cooperative Exploration. arXiv 2023, arXiv:2301.03398. [Google Scholar]
- Colares, R.G.; Chaimowicz, L. The next Frontier: Combining Information Gain and Distance Cost for Decentralized Multi-Robot Exploration. In Proceedings of the 31st Annual ACM Symposium on Applied Computing, New York, NY, USA, 4 April 2016; pp. 268–274. [Google Scholar] [CrossRef]
- Bramblett, L.; Peddi, R.; Bezzo, N. Coordinated Multi-Agent Exploration, Rendezvous, & Task Allocation in Unknown Environments with Limited Connectivity. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 12706–12712. [Google Scholar] [CrossRef]
- Dornhege, C.; Kleiner, A.; Hertle, A.; Kolling, A. Multirobot Coverage Search in Three Dimensions. J. Field Robot. 2016, 33, 537–558. [Google Scholar] [CrossRef]
- Dong, S.; Xu, K.; Zhou, Q.; Tagliasacchi, A.; Xin, S.; Nießner, M.; Chen, B. Multi-Robot Collaborative Dense Scene Reconstruction. ACM Trans. Graph. 2019, 38, 84. [Google Scholar] [CrossRef]
- Bartolomei, L.; Teixeira, L.; Chli, M. Fast Multi-UAV Decentralized Exploration of Forests. IEEE Robot. Autom. Lett. 2023, 2023, 5576–5583. [Google Scholar] [CrossRef]
- Choset, H.; Lynch, K.; Hutchinson, S.; Kantor, G.; Burgard, W.; Kavraki, L.; Thrun, S. Principles of Robot Motion: Theory, Algorithms, and Implementations; MIT Press: Cambridge, MA, USA, 2003. [Google Scholar]
- Christensen, H.I.; Hager, G.D. Sensing and estimation. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 91–112. [Google Scholar]
- Moravec, H.; Elfes, A. High resolution maps from wide angle sonar. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MI, USA, 25–28 March 1985; Volume 2, pp. 116–121. [Google Scholar] [CrossRef]
- Thrun, S. Learning occupancy grid maps with forward sensor models. Auton. Robot. 2003, 15, 111–127. [Google Scholar] [CrossRef]
- Foley, J.D. Computer Graphics: Principles and Practice; Addison-Wesley Professional: Boston, MA, USA, 1996; Volume 12110. [Google Scholar]
- Fisher, R.; Konolige, K. Range Sensors. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 521–542. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Han, L.; Gao, F.; Zhou, B.; Shen, S. FIESTA: Fast Incremental Euclidean Distance Fields for Online Motion Planning of Aerial Robots. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4423–4430. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Workshop on Open Source Robotics, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Yamauchi, B. A frontier-based approach for autonomous exploration. In Proceedings of the Proceedings 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation CIRA’97. ‘Towards New Computational Principles for Robotics and Automation’, Monterey, CA, USA, 10–11 July 1997; pp. 146–151. [Google Scholar]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A comprehensive taxonomy for multi-robot task allocation. Int. J. Robot. Res. 2013, 32, 1495–1512. [Google Scholar] [CrossRef]
- Cieslewski, T.; Kaufmann, E.; Scaramuzza, D. Rapid exploration with multi-rotors: A frontier selection method for high speed flight. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2135–2142. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Coverage path planning: The boustrophedon cellular decomposition. In Proceedings of the Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 1998; pp. 203–209. [Google Scholar]
- Kavraki, L.E.; LaValle, S.M. Motion planning. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 139–162. [Google Scholar]
- Wurll, C.; Henrich, D.; Wörn, H. Multi-Goal Path Planning for Industrial Robots; Technische Universität Kaiserslautern: Kaiserslautern, Germany, 1999; Available online: https://nbn-resolving.de/urn:nbn:de:hbz:386-kluedo-9637 (accessed on 13 November 2023).
- Eyerich, P.; Mattmüller, R.; Röger, G. Using the Context-Enhanced Additive Heuristic for Temporal and Numeric Planning. In Proceedings of the Nineteenth International Conference on International Conference on Automated Planning and Scheduling, Thessaloniki, Greece, 19–23 September 2009; AAAI Press: Washington, DC, USA, 2009; pp. 130–137. [Google Scholar]
- Helsgaun, K. An effective implementation of the Lin–Kernighan traveling salesman heuristic. Eur. J. Oper. Res. 2000, 126, 106–130. [Google Scholar] [CrossRef]
- Lewis, J.S.; Edwards, W.; Benson, K.; Rekleitis, I.; O’Kane, J.M. Semi-boustrophedon coverage with a dubins vehicle. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5630–5637. [Google Scholar] [CrossRef]
- Sedighpour, M.; Yousefikhoshbakht, M.; Mahmoodi Darani, N. An effective genetic algorithm for solving the multiple traveling salesman problem. J. Optim. Ind. Eng. 2012, 4, 73–79. [Google Scholar]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef]
- Yu, C.; Velu, A.; Vinitsky, E.; Gao, J.; Wang, Y.; Bayen, A.; Wu, Y. The surprising effectiveness of ppo in cooperative multi-agent games. Adv. Neural Inf. Process. Syst. 2022, 35, 24611–24624. [Google Scholar]
- Cao, Y.U.; Kahng, A.B.; Fukunaga, A.S. Cooperative mobile robotics: Antecedents and directions. Robot. Colon. 1997, 4, 7–27. [Google Scholar]
- Aumann, R.J.; Dreze, J.H. Cooperative games with coalition structures. Int. J. Game Theory 1974, 3, 217–237. [Google Scholar] [CrossRef]
- Bengio, Y.; Louradour, J.; Collobert, R.; Weston, J. Curriculum learning. In Proceedings of the 26th Annual International Conference on Machine Learning, Montreal, QC, Canada, 14–18 June 2009; pp. 41–48. [Google Scholar]
- inmarsat. Launch of Inmarsat SwiftBroadband Unmanned Aerial Vehicle Service to Provide Operational Capability Boost. 2017. Available online: https://www.inmarsat.com/en/news/latest-news/government/2017/launch-inmarsat-swiftbroadband-unmanned-aerial-vehicle-service-provide-operational-capability-boost.html (accessed on 13 November 2023).
- Mataric, M.J. Interaction and Intelligent Behavior. 1994. Available online: https://dspace.mit.edu/handle/1721.1/12012 (accessed on 13 November 2023).
- Sikand, K.S.; Zartman, L.; Rabiee, S.; Biswas, J. Robofleet: Secure Open Source Communication and Management for Fleets of Autonomous Robots. In Proceedings of the Intelligent Robots and Systems (IROS), IEEE/RSJ International Conference, Prague, Czech Republic, 27 September 2021; pp. 406–412. [Google Scholar] [CrossRef]
- Han, Y.; Ma, W. Automatic Monitoring of Water Pollution based on the Combination of UAV and USV. In Proceedings of the 2021 IEEE 4th International Conference on Electronic Information and Communication Technology (ICEICT), Xi’an, China, 18–20 August 2021; pp. 420–424. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P | I | Co |
|---|---|---|
| Population | Interest | Context |
| Multi-robot systems | Coverage | Unknown and unstructured environments |
| Search Concepts | ||
| Multi-robot | Coverage | Unknown and unstructured |
| Alternative Terms | ||
| Multi-agent | Unknown Unstructured Extreme Real | |
| Research Question |
|---|
| What is the most suitable framework for multi-robot coverage in domain applications resembling offshore wind inspection? |
Subquestions:
|
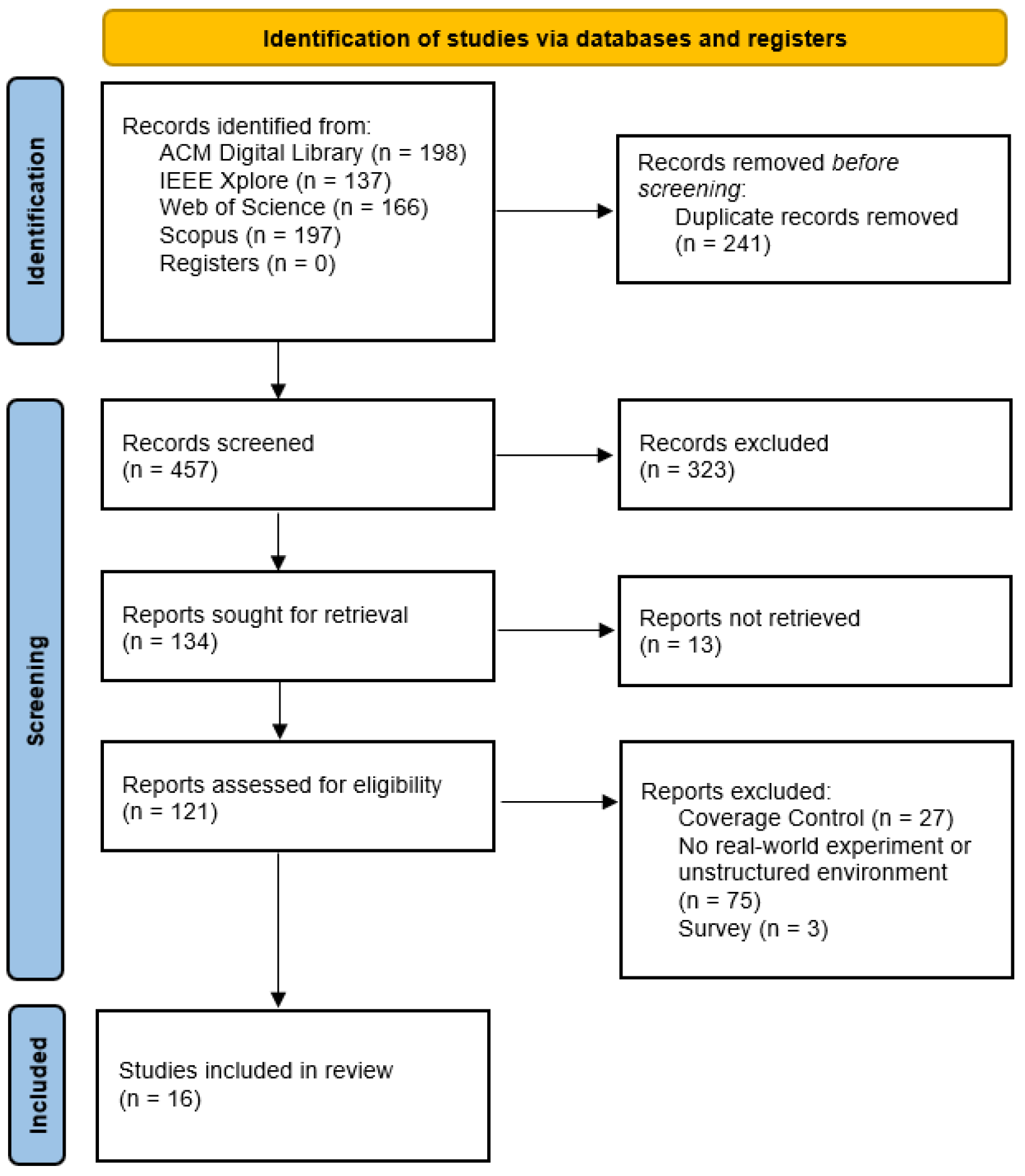
| Digital Library | Description | URL | Area of Focus |
|---|---|---|---|
| IEEE Xplore | A digital library provides all IEEE publications, as well as those from its publishing partners. | https://ieeexplore.ieee.org/ (accessed on 20 September 2023) | Computer science, electrical engineering, and electronics. |
| The ACM Guide to Computing Literature | The Association of Computing Machinery’s digital library provides all ACM publications and works from all major publishers. | https://dl.acm.org/ (accessed on 20 September 2023) | Computing and Information Technology |
| Scopus | Scopus covers 240 disciplines to ensure researchers, instructors, librarians, and students have confidence that they are not missing out on the vital information they need to advance their research and scholarship. | https://www.scopus.com/ (accessed on 20 September 2023) | General |
| Web of Science | The Web of Science is a paid-access platform that provides access to multiple databases that provide reference and citation data from academic journals, conference proceedings, and other documents in various academic disciplines. | https://www.webofscience.com/wos/ (accessed on 20 September 2023) | General |
| Search Query |
|---|
|
| Criteria Type | Included | Excluded |
|---|---|---|
| Coverage control | Works considering the coverage path-planning problem | Works considering the coverage control problem |
| Environmental structure | Works considering environments resembling OTW inspection, namely unstructured, unknown, extreme, or real environments | Works considering environments not fulfilling these criteria |
| Surveys | Any non-survey work | Surveys |
| Environmental Model | Work (Authors, Year) |
|---|---|
| Geometric map | Ball et al., 2015 [40] Masehian et al., 2017 [41] Karapetyan et al., 2018 [42] Tang et al., 2022 [43] |
| Topological map | Ball et al., 2015 [40] Karapetyan et al., 2018 [42] Kim et al., 2022 [44] |
| Grid map | Kalde et al., 2015 [45] Song et al., 2015 [46] Perez-Imaz et al., 2016 [47] Sharma et al., 2016 [48] Zhang et al., 2019 [49] Yu et al., 2023 [50] |
| 2D cost map | Ball et al., 2015 [40] |
| Occupancy grid | Colares and Chaimowicz 2016 [51] Bramblett et al., 2022 [52] Kim et al., 2022 [44] |
| Octomap | Dornhege et al. 2016 [53] Dong et al., 2019 [54] |
| Euclidean signed distance field (ESDF) map | Bartolomei et al., 2023 [55] |
| Paper | Task Decomposition | Task Allocation |
|---|---|---|
| Ball et al. (2015) [40] | Boustrophedon cell division | Not described |
| Kalde et al. (2015) [45] | Frontiers and humans identified as potential tasks | Greedy allocation on a cost matrix |
| Song et al. (2015) [46] | Pre-decomposed | Pre-allocated |
| Colares and Chaimowicz (2016) [51] | All frontier cells as tasks | Optimal frontier based on a cost function |
| Dornhege et al. (2016) [53] | Set of optimal views | Greedy allocation or set the coverage solution with TFD solver |
| Perez-Imaz et al. (2016) [47] | Hexagonal grid | K-means clustering |
| Sharma et al. (2016) [48] | Pre-decomposed | Pre-allocated |
| Masehian et al. (2017) [41] | Hierarchy of decompositions | Allocated based on other classes of robots identifying tasks |
| Karapetyan et al. (2018) [42] | Boustrophedon cell division or DCS path splitting | Not described |
| Dong et al. (2019) [54] | Set of optimal frontier views | K-means clustering |
| Zhang et al. (2019) [49] | DARP | DARP |
| Bramblett et al. (2022) [52] | All frontier cells as tasks for exploration; tasks discovered in exploration | K-means clustering, auctioning, and optimal frontier based on a cost function |
| Kim et al. (2022) [44] | Frontier cells based on the uncertainty of neighbours | Heterogeneous k-means clustering |
| Tang et al. (2022) [43] | N/A | N/A |
| Bartolomei et al. (2023) [55] | Exploration: clustered frontiers [67]; Collection: uncovered trails | Exploration: optimal frontier-based with minimal cost; Optimal trail-based with minimal cost |
| Yu et al. (2023) [50] | N/A | N/A |
| Paper | Motion Planning Approach |
|---|---|
| Ball et al. (2015) [40] | Search-based lattice planner with a local pure pursuit controller |
| Kalde et al. (2015) [45] | Potential field on a grid map |
| Song et al. (2015) [46] | Generalised Ising model with local and global navigation mechanisms |
| Colares and Chaimowicz (2016) [51] | Not specified beyond iterative task selection |
| Dornhege et al. (2016) [53] | Single TSP problem solved with Temporal Fast Downward planner or Lin–Kernighan heuristic or a single greedy approach split according to the number of robots |
| Perez-Imaz et al. (2016) [47] | Dijkstra’s algorithm on a hexagonal graph with a lawnmower pattern |
| Sharma et al. (2016) [48] | Directional motion and nature-inspired algorithms |
| Masehian et al. (2017) [41] | Different policies for different classes of robot: boustrophedon motion, boundary following, and guide-path following with obstacle avoidance |
| Karapetyan et al. (2018) [42] | Dubins coverage solver with TSP problem solving |
| Dong et al. (2019) [54] | Christofides’ algorithm for TSP approximation with path smoothing |
| Zhang et al. (2019) [49] | Spanning tree coverage algorithm |
| Bramblett et al. (2022) [52] | A* path-planning algorithm with iterative frontier-based tasks |
| Kim et al. (2022) [44] | Genetic algorithm for TSP problem with A* algorithm and B-spline for path computation |
| Tang et al. (2022) [43] | Reinforcement learning with a multi-layer perception for the policy network, with the action space comprising angular and linear velocity |
| Bartolomei et al. (2023) [55] | Trajectory generation integrated with task allocation |
| Yu et al. (2023) [50] | Reinforcement learning with a decentralised multi-tower CNN-based policy. The action space represents a global goal, and local navigation is achieved with the A* algorithm. |
| Literature | Online/Offline | Communication | Hierarchy | Heterogeneity | Fault Tolerance |
|---|---|---|---|---|---|
| Ball et al. (2015) [40] | Online | Extrinsic | No | Homogeneous | Not discussed |
| Kalde et al. (2015) [45] | Online | Extrinsic | No | Homogeneous | Not discussed |
| Song et al. (2015) [46] | Online | Extrinsic | Dynamic hierarchy | Homogeneous | Not discussed |
| Colares and Chaimowicz (2016) [51] | Online | Extrinsic | No | Homogeneous | Not discussed |
| Dornhege et al. (2016) [53] | Offline | Extrinsic | No | Homogeneous | Not discussed |
| Perez-Imaz et al. (2016) [47] | Online | None | No | Homogeneous | Yes |
| Sharma et al. (2016) [48] | Online | None | No | Homogeneous | Not discussed |
| Masehian et al. (2017) [41] | Online | Extrinsic | Yes | Heterogeneous | Not discussed |
| Karapetyan et al. (2018) [42] | Offline | None | No | Homogeneous | Not discussed |
| Dong et al. (2019) [54] | Online | Extrinsic | No | Homogeneous | Not discussed |
| Zhang et al. (2019) [49] | Online | Extrinsic | No | Heterogeneous | Not discussed |
| Bramblett et al. (2022) [52] | Online | Extrinsic | No | Homogeneous | Not discussed |
| Kim et al. (2022) [44] | Online | Extrinsic | No | Heterogeneous | Yes |
| Tang et al. (2022) [43] | Online | Extrinsic | No | Heterogeneous | Not discussed |
| Bartolomei et al. (2023) [55] | Online | Extrinsic | No | Homogeneous | Not discussed |
| Yu et al. (2023) [50] | Online | Extrinsic | No | Homogeneous | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Foster, A.J.I.; Gianni, M.; Aly, A.; Samani, H.; Sharma, S. Multi-Robot Coverage Path Planning for the Inspection of Offshore Wind Farms: A Review. Drones 2024, 8, 10. https://doi.org/10.3390/drones8010010
Foster AJI, Gianni M, Aly A, Samani H, Sharma S. Multi-Robot Coverage Path Planning for the Inspection of Offshore Wind Farms: A Review. Drones. 2024; 8(1):10. https://doi.org/10.3390/drones8010010
Chicago/Turabian StyleFoster, Ashley J. I., Mario Gianni, Amir Aly, Hooman Samani, and Sanjay Sharma. 2024. "Multi-Robot Coverage Path Planning for the Inspection of Offshore Wind Farms: A Review" Drones 8, no. 1: 10. https://doi.org/10.3390/drones8010010
APA StyleFoster, A. J. I., Gianni, M., Aly, A., Samani, H., & Sharma, S. (2024). Multi-Robot Coverage Path Planning for the Inspection of Offshore Wind Farms: A Review. Drones, 8(1), 10. https://doi.org/10.3390/drones8010010