

Optimal Configuration of Heterogeneous Swarm for Cooperative Detection with Minimum DOP Based on Nested Cones


Abstract
1. Introduction
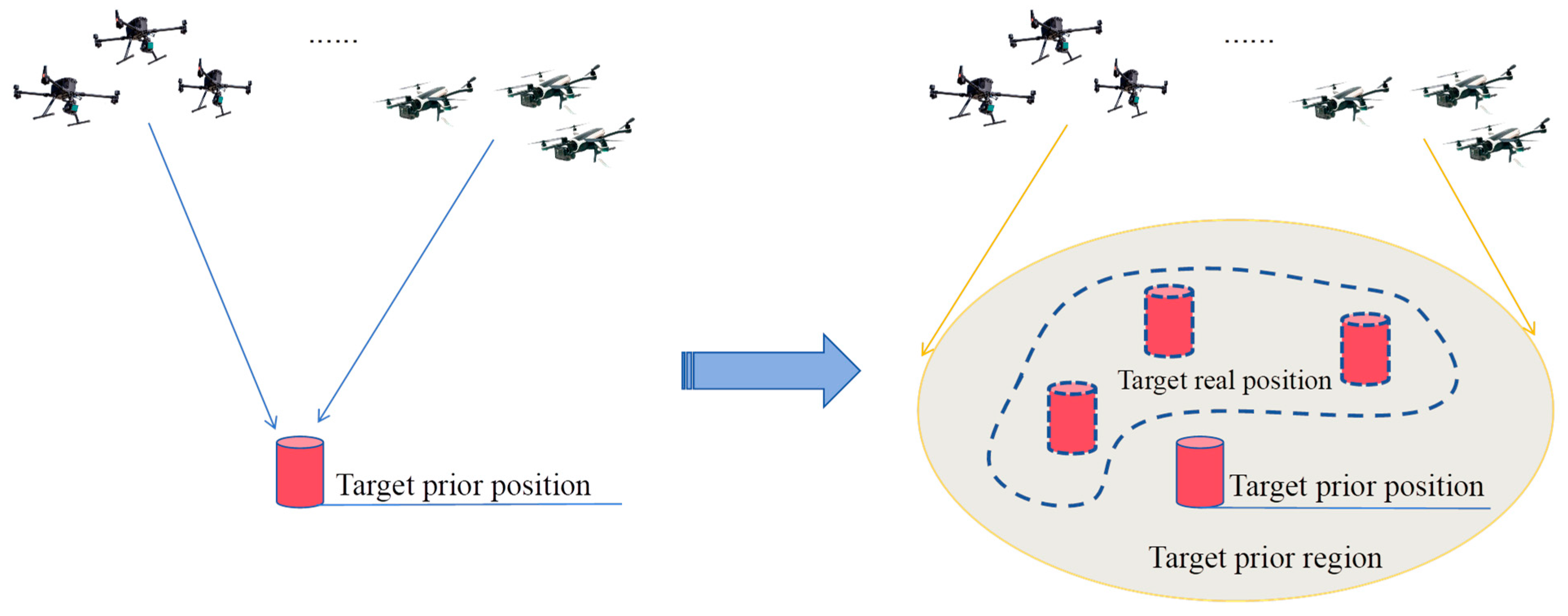
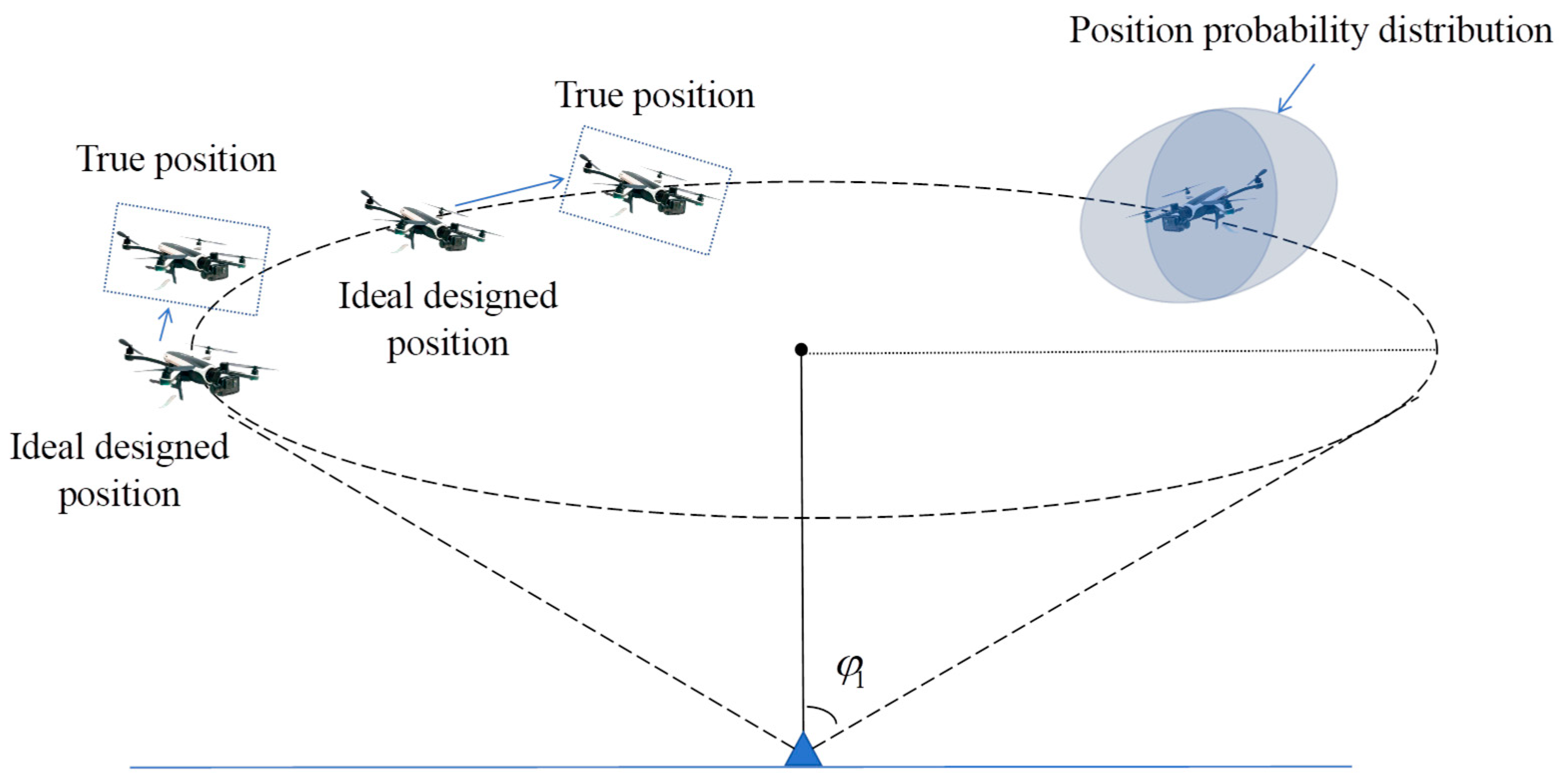
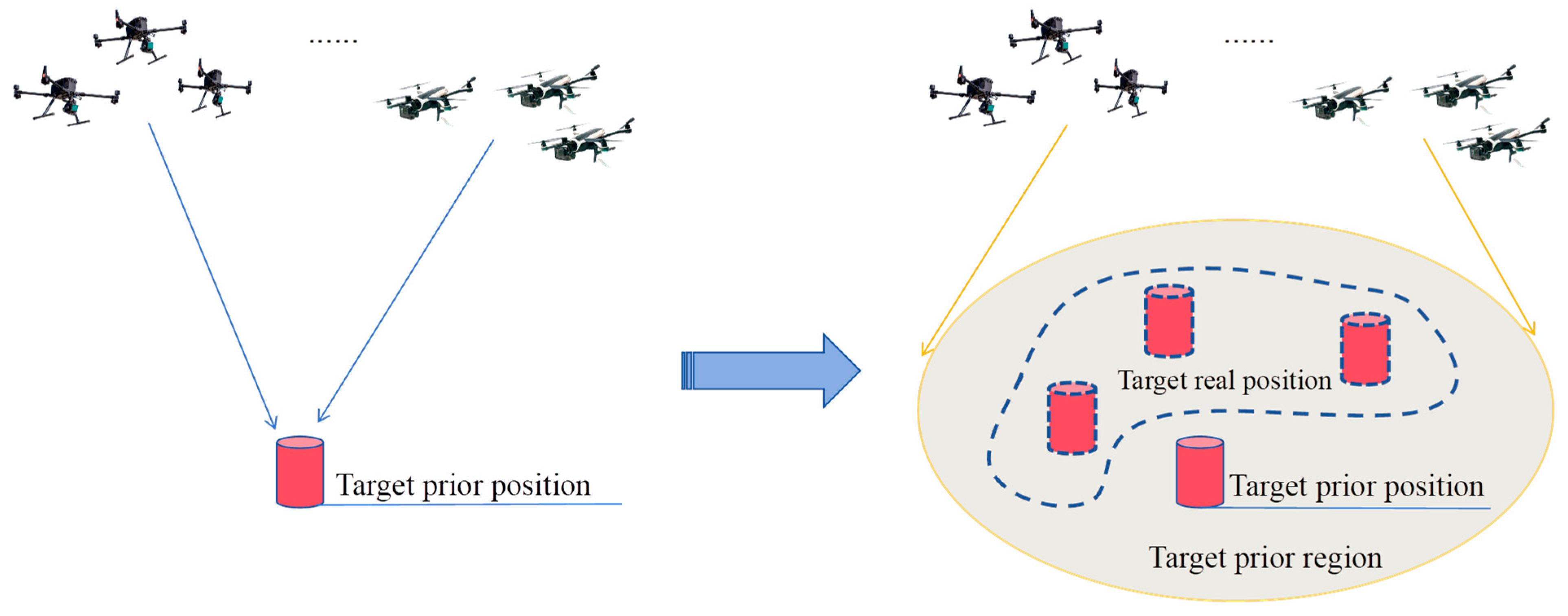
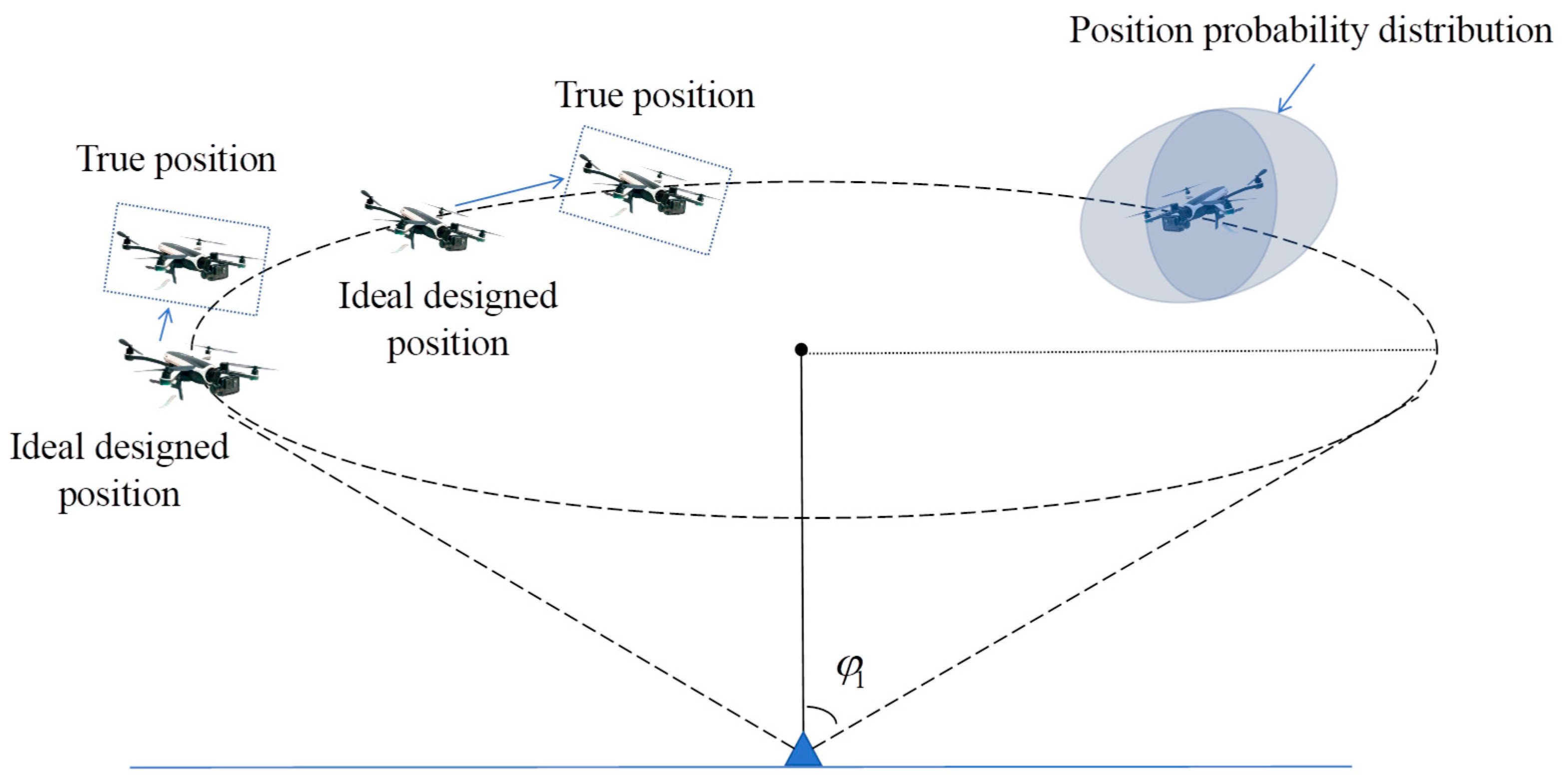
- In detection tasks, the configuration design based on the target’s prior position relies on the accuracy of prior information. To address the problem of an inaccurate prior position of the target, the optimization objective is transformed from the DOP of the target point to the average DOP of the target area. On this basis, the design problem of the optimal DOP nested cone configuration on the target prior region was studied to ensure that the designed optimal configuration can achieve the minimum DOP value within a certain range on the plane, which avoids the problem of the detection configuration being unable to achieve optimal detection due to inaccurate target prior positions.
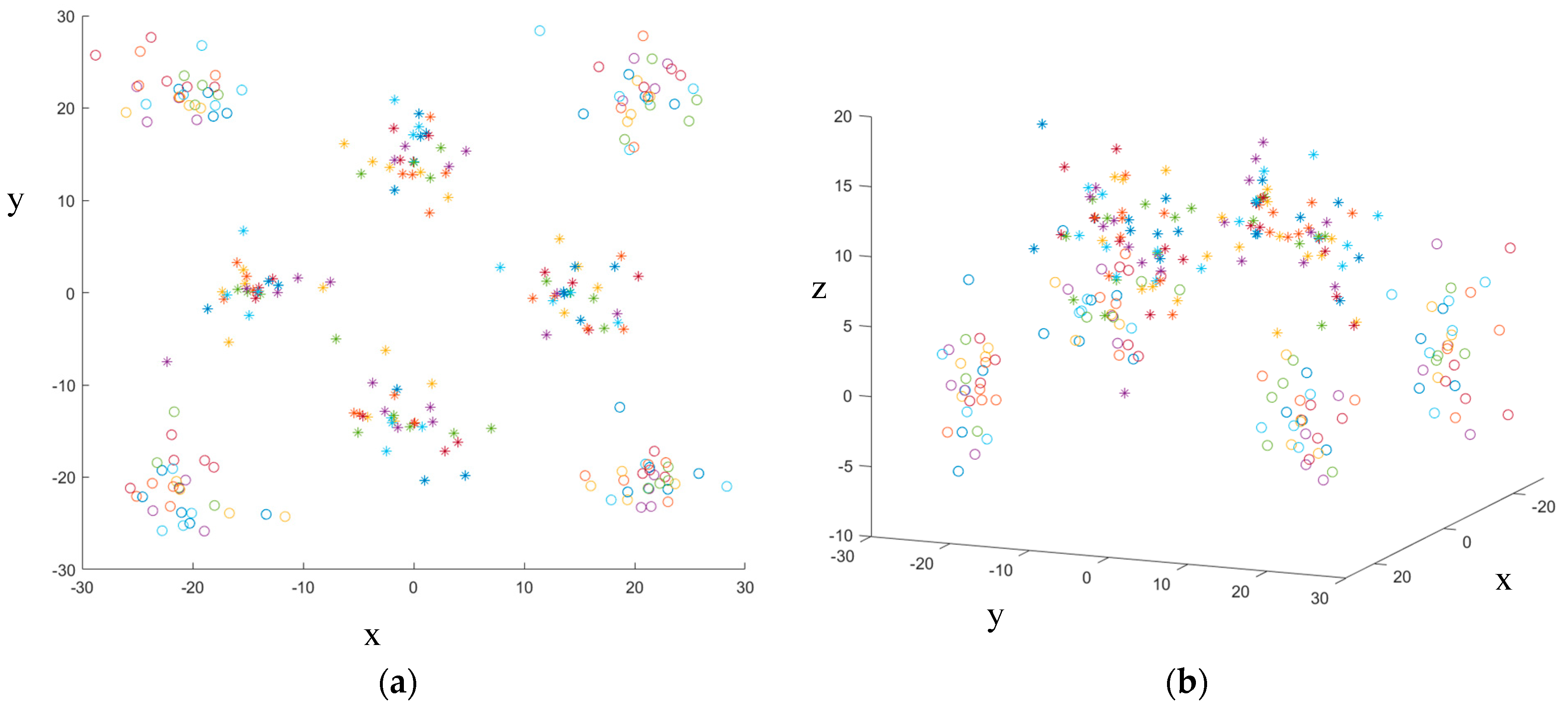
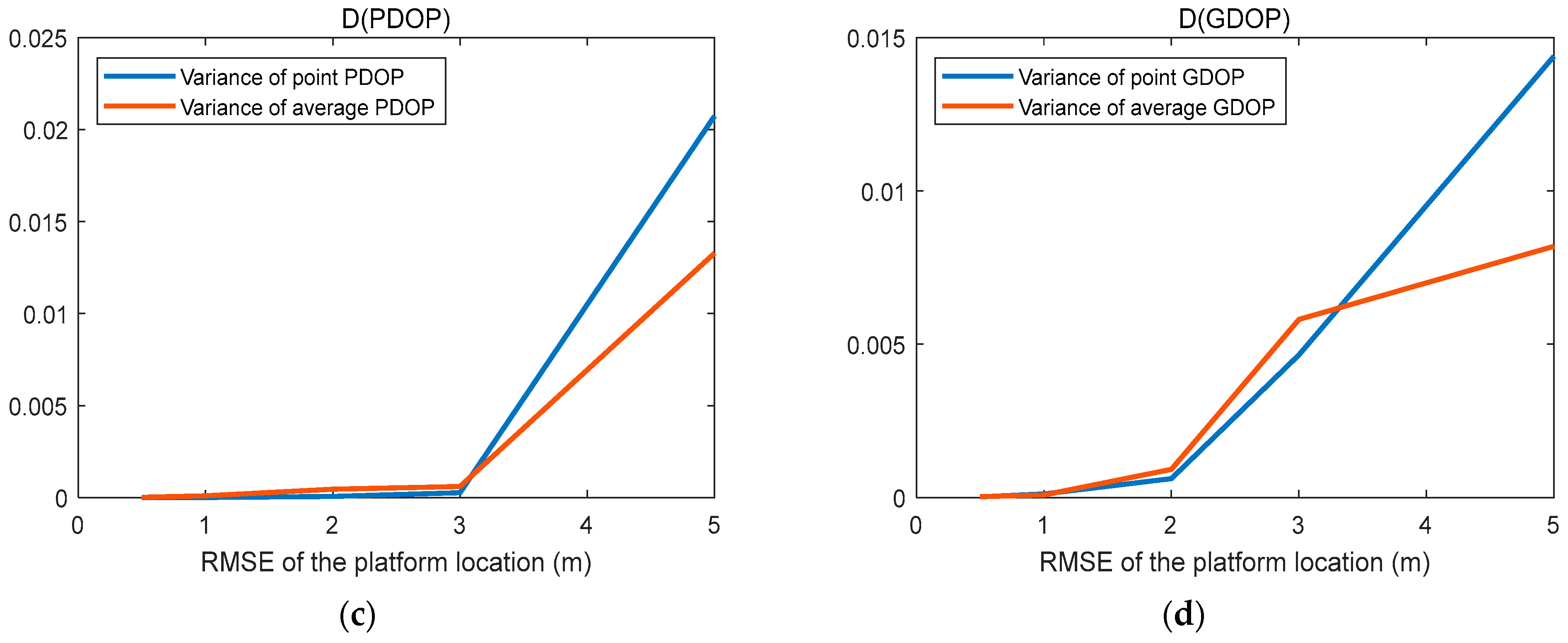
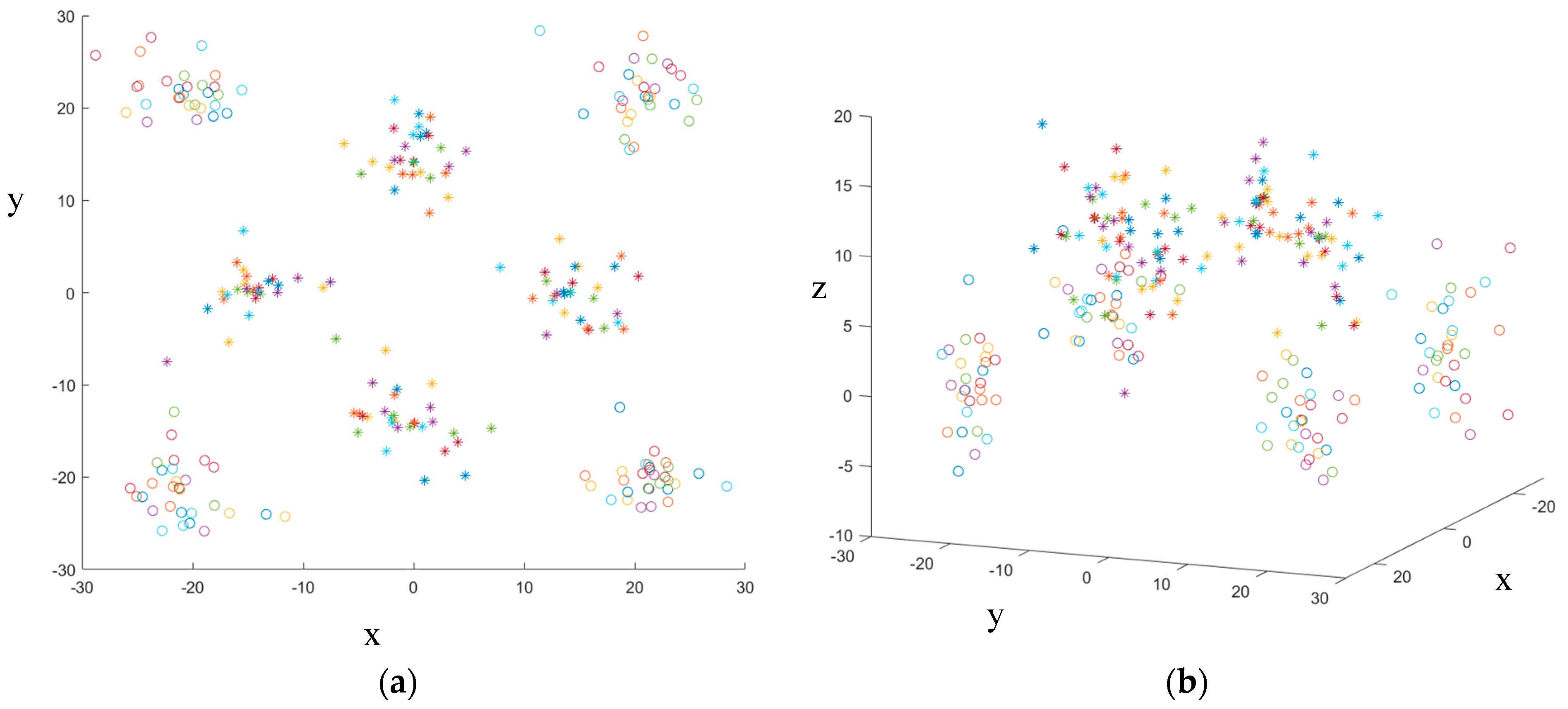
- Considering that in practical engineering applications, the localization errors caused by the poor self-positioning performance of drones will lead to the inaccuracy of target detection. A large number of simulation experiments were conducted to evaluate the impact of positioning errors on DOP under the optimal DOP configuration, which provides experimental support for the robustness analysis of different 3D optimal configurations against platforms’ localization errors.
- Based on the evaluation conclusion drawn from the second work, an AG was designed using UGVs to further reduce the impact of the positioning performance of the detection drones on the detection results. We fully arrange the roles of all nodes in the heterogeneous unmanned swarms and apply cooperative positioning methods to improve the positioning accuracy of nodes in the DG, significantly reducing the self-positioning error of detection nodes and improving the detection accuracy toward targets.
- To maximize the performance of cooperative navigation for nodes in the DG by optimizing the configuration of the AG, an objective function for minimum DOP for the detection node was established, which was used to design the placement of each anchor point in the AG. By introducing weight coefficients corresponding to each detection node, it is ensured that the configuration design of the AG can remain optimal when facing more complex DGs to optimize detection accuracy.
2. Materials and Methods
2.1. Concepts and Algorithms
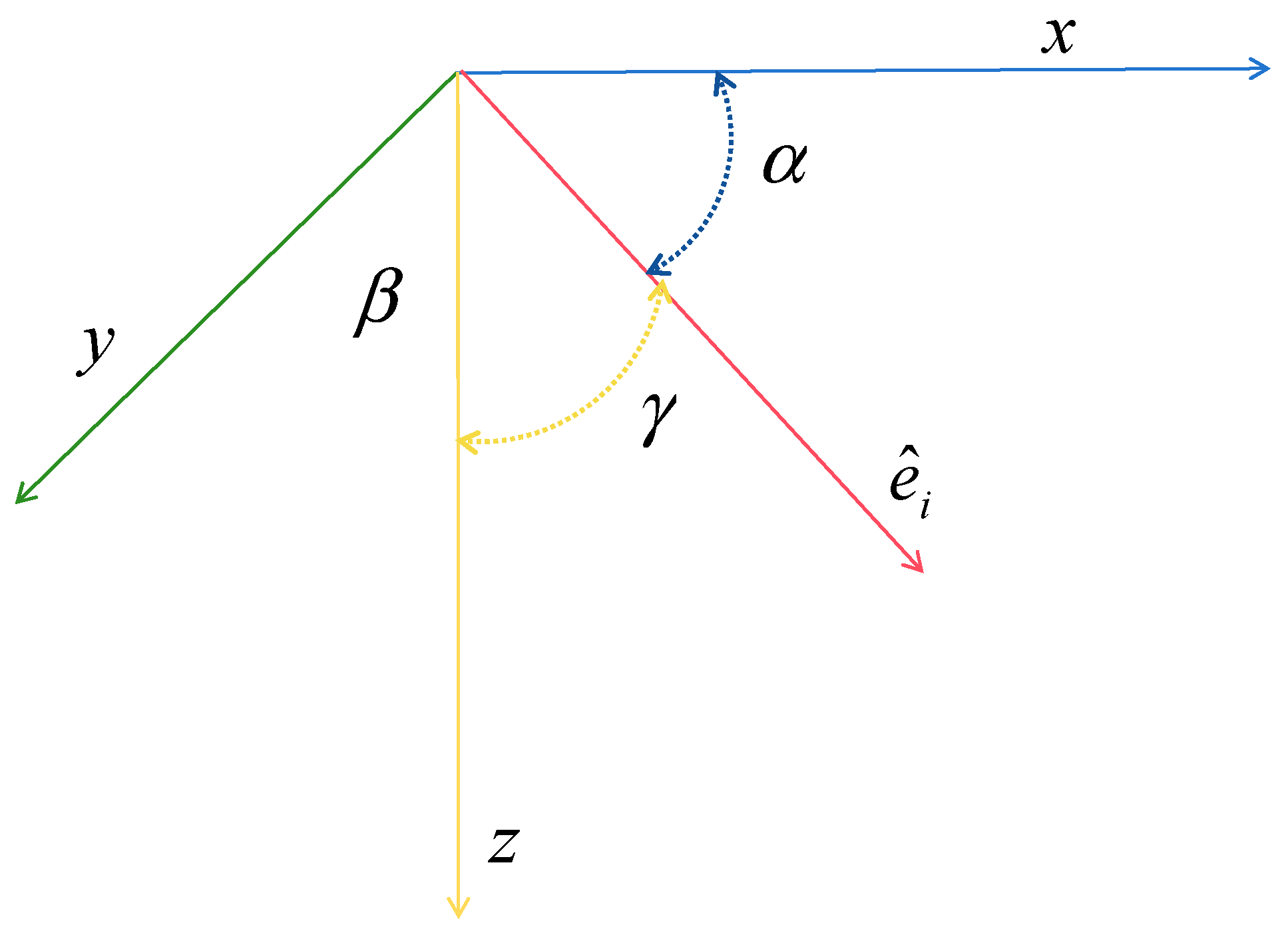
2.1.1. PDOP and GDOP
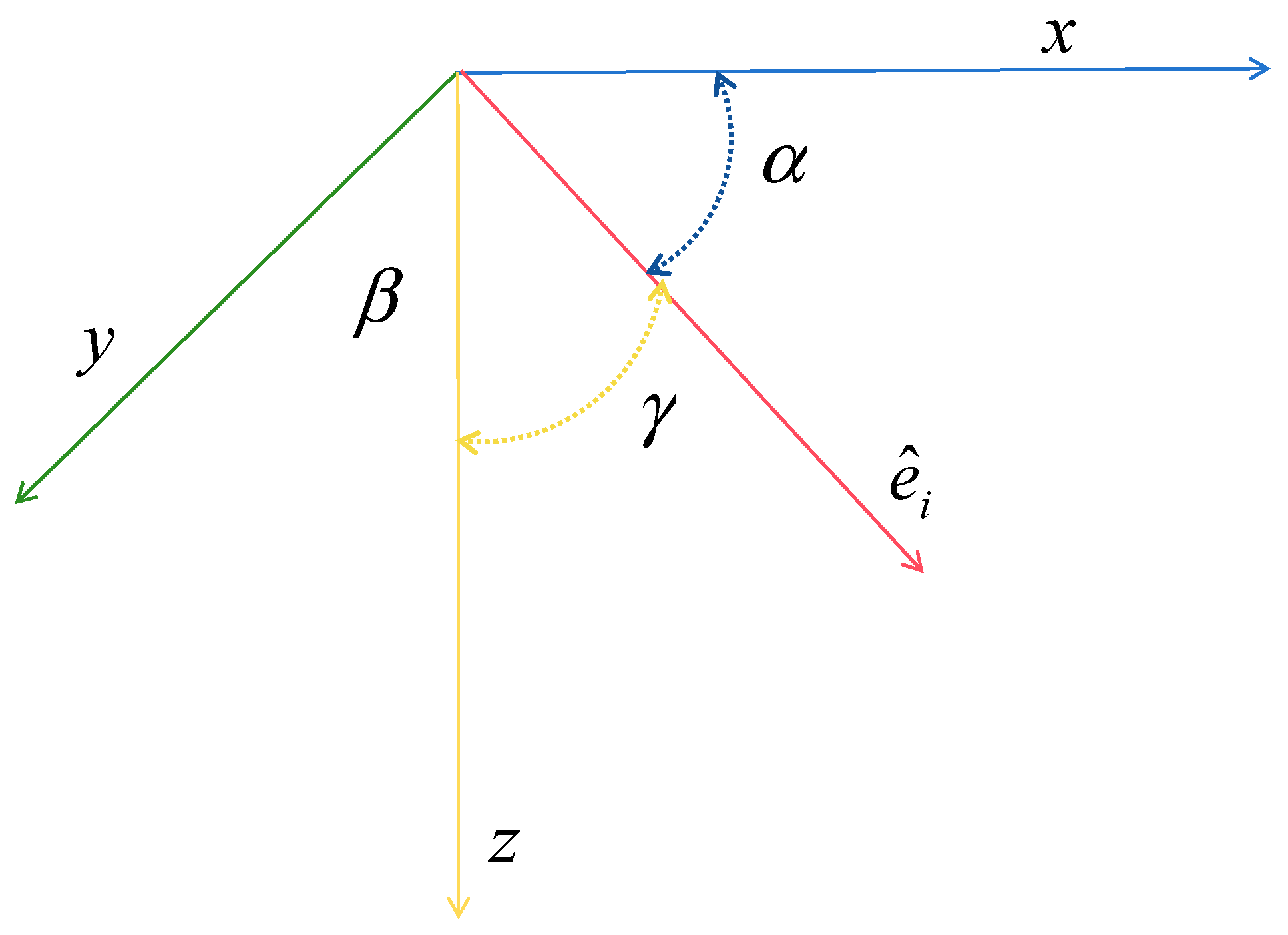
2.1.2. Extremum Condition of DOP Value at Single Point
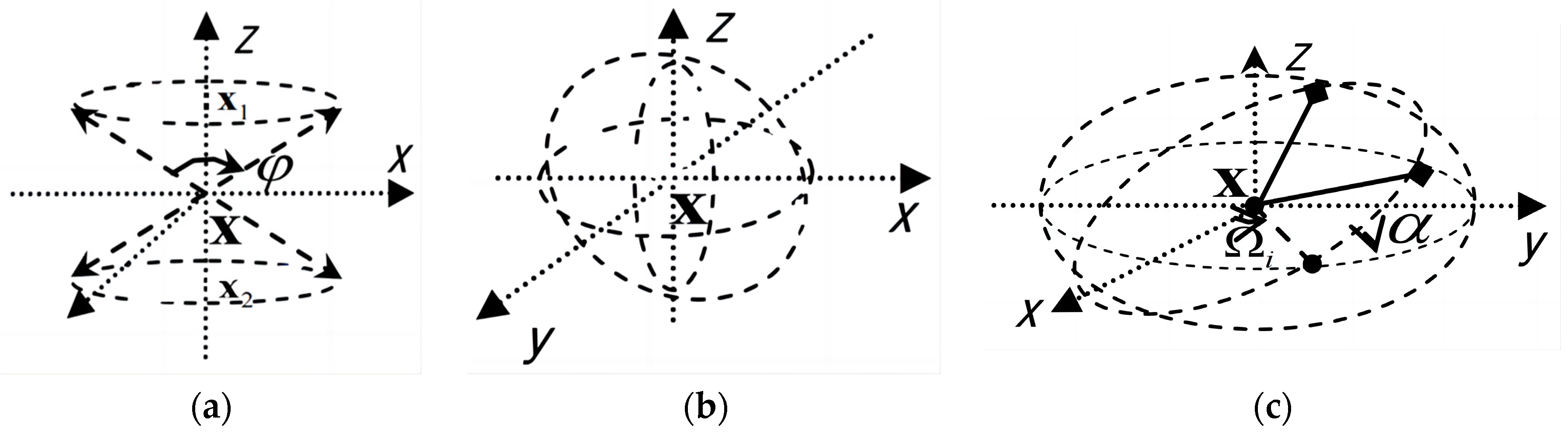
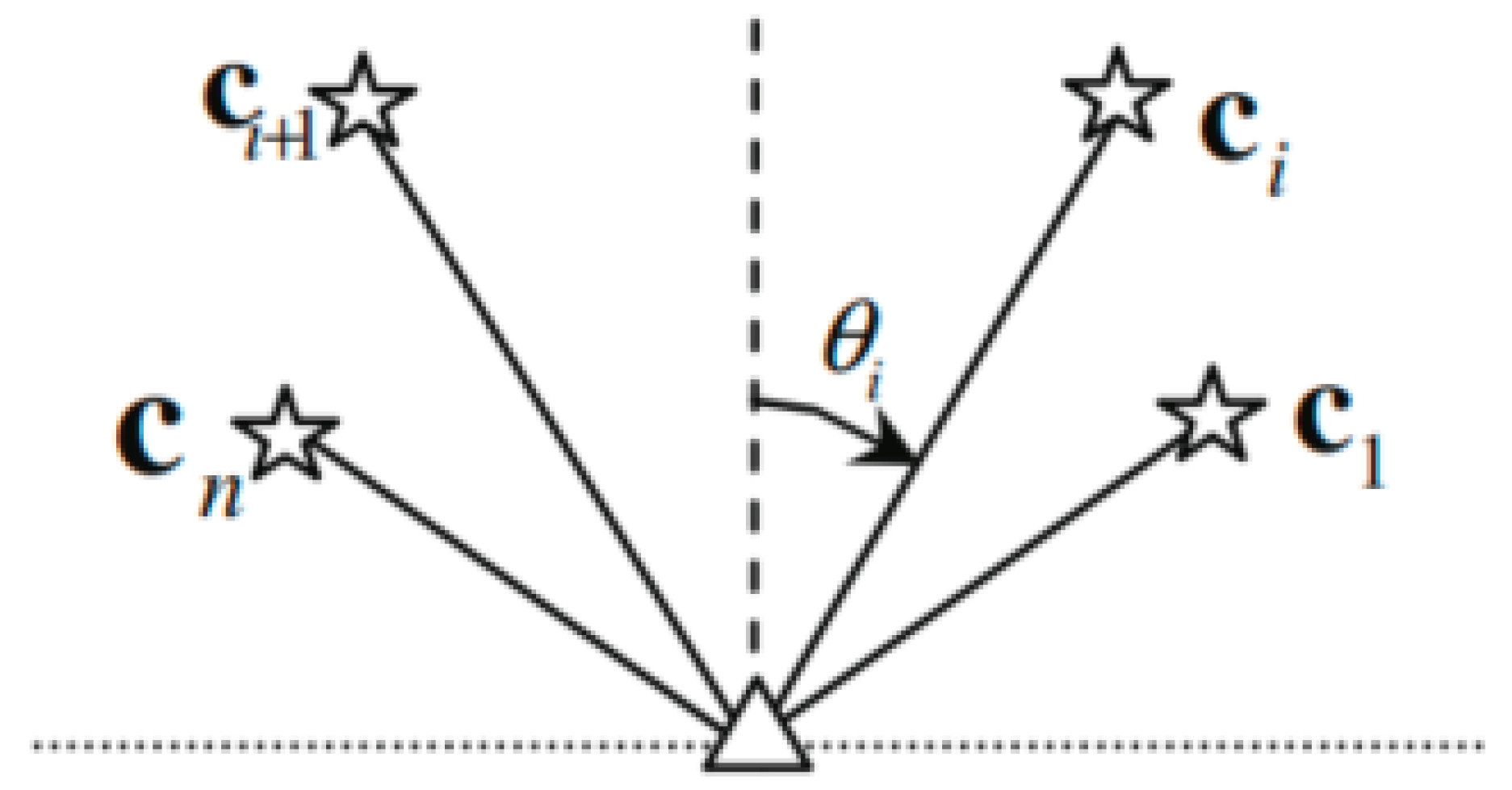
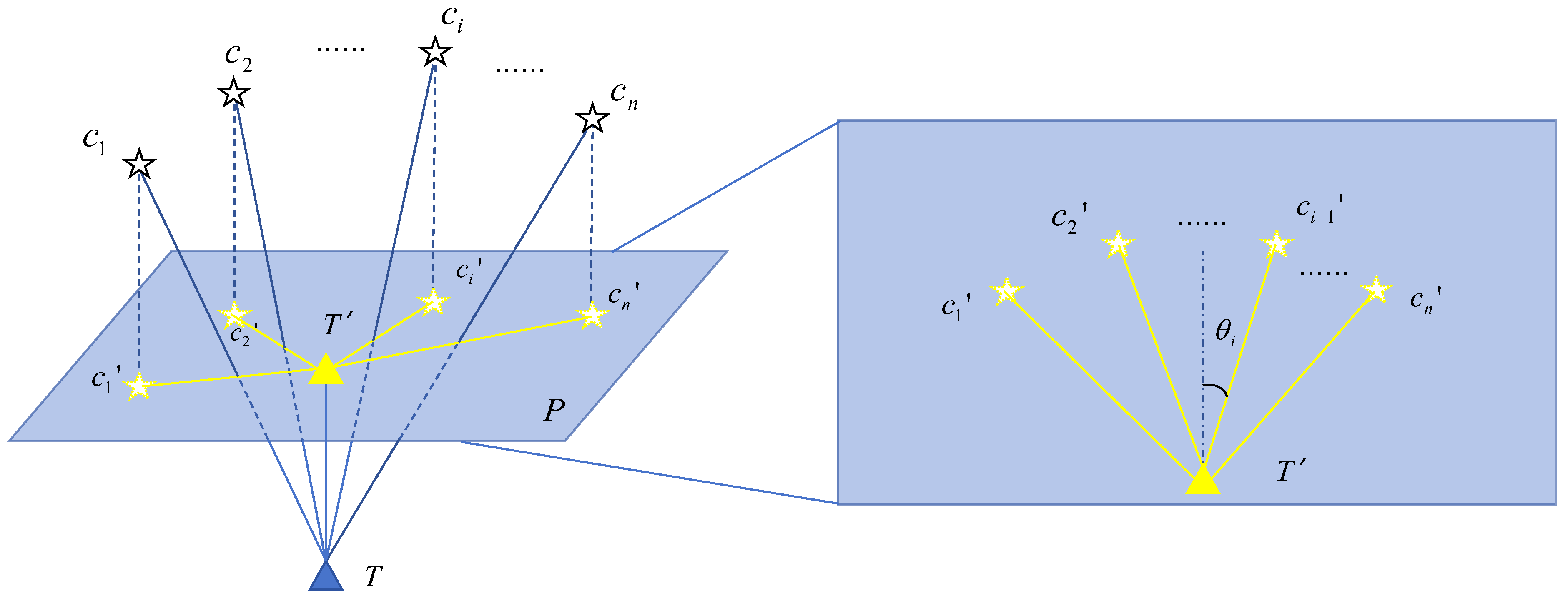
2.1.3. The Configuration of Unmanned Swarm for Minimum DOP at Single Point
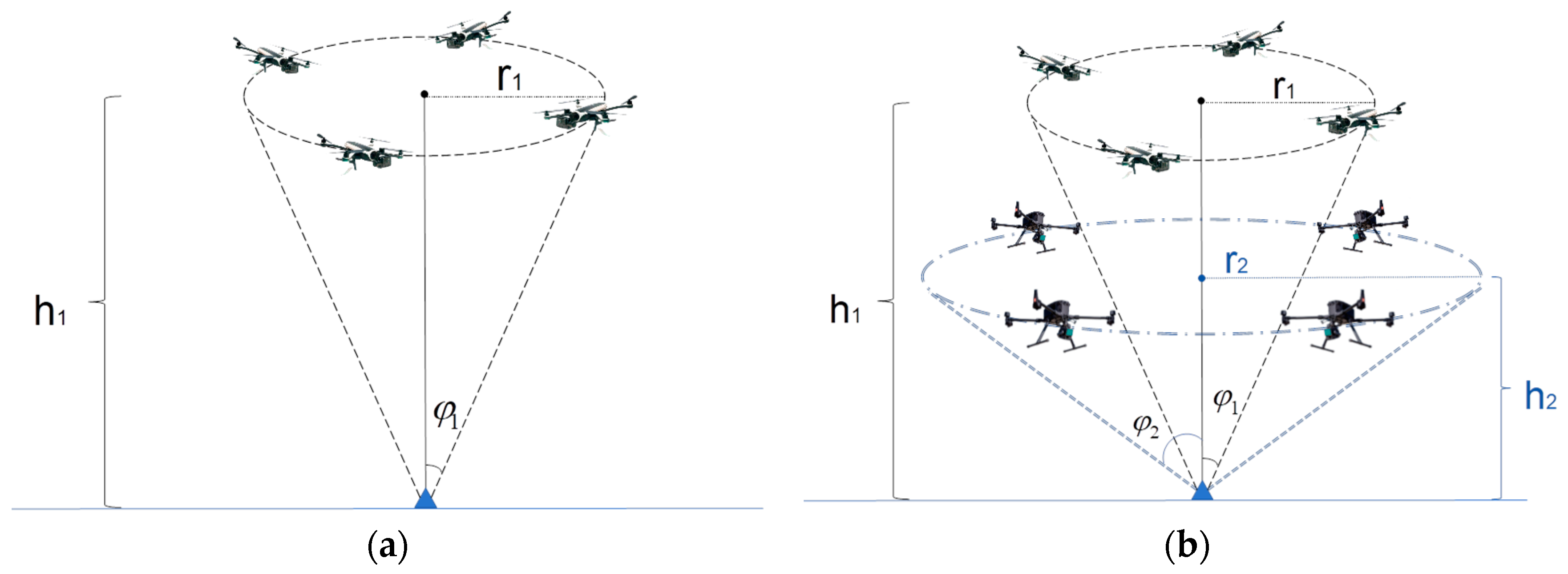
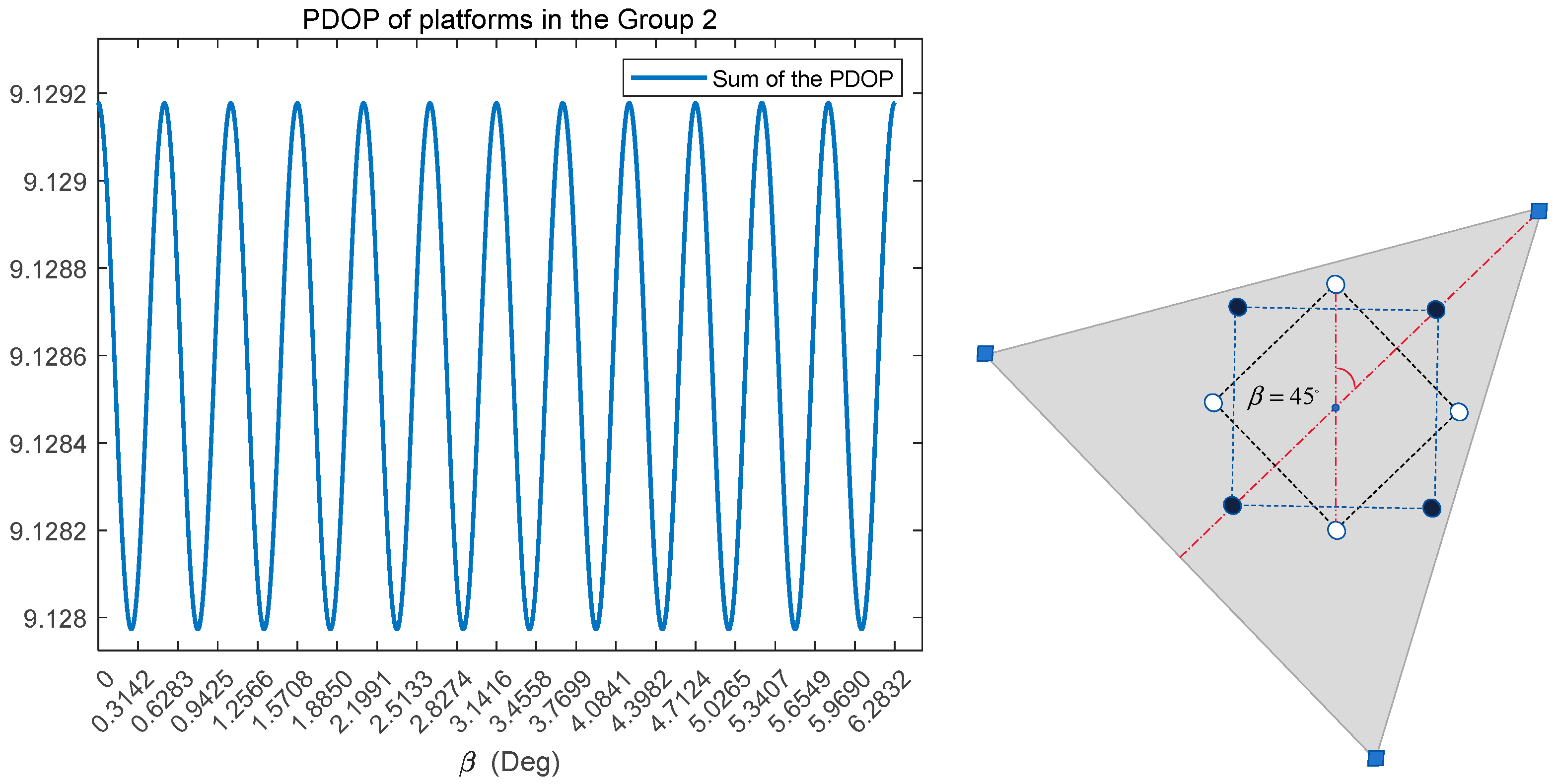
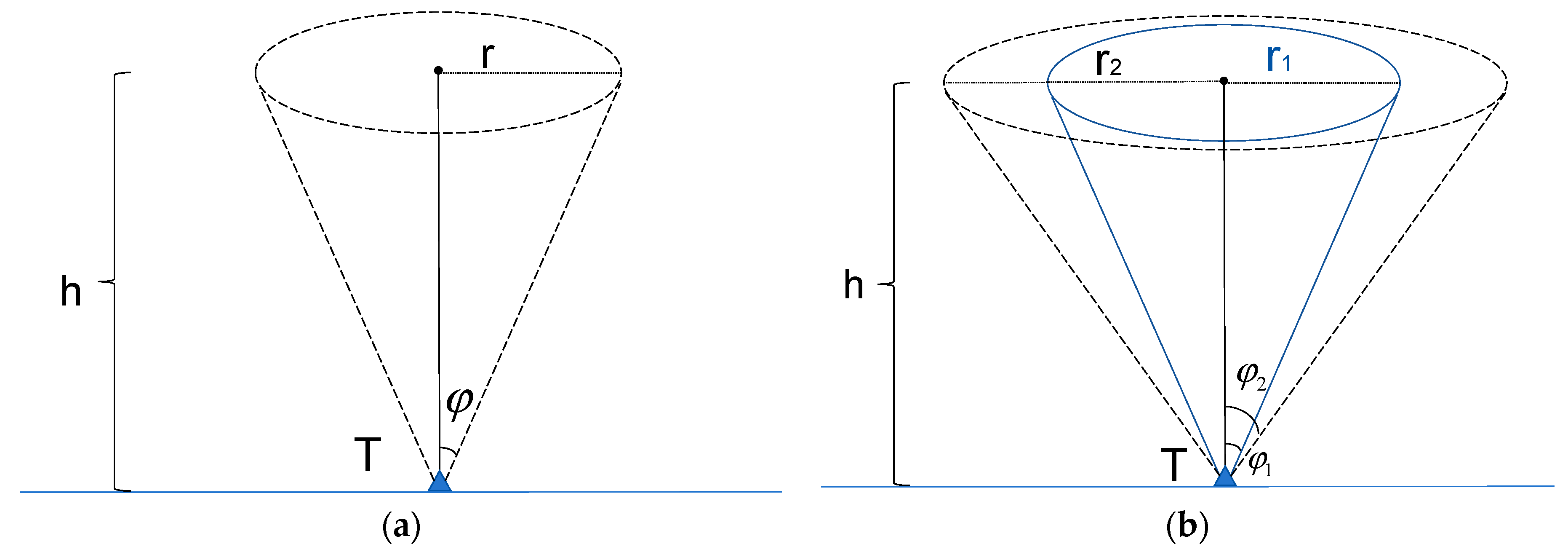
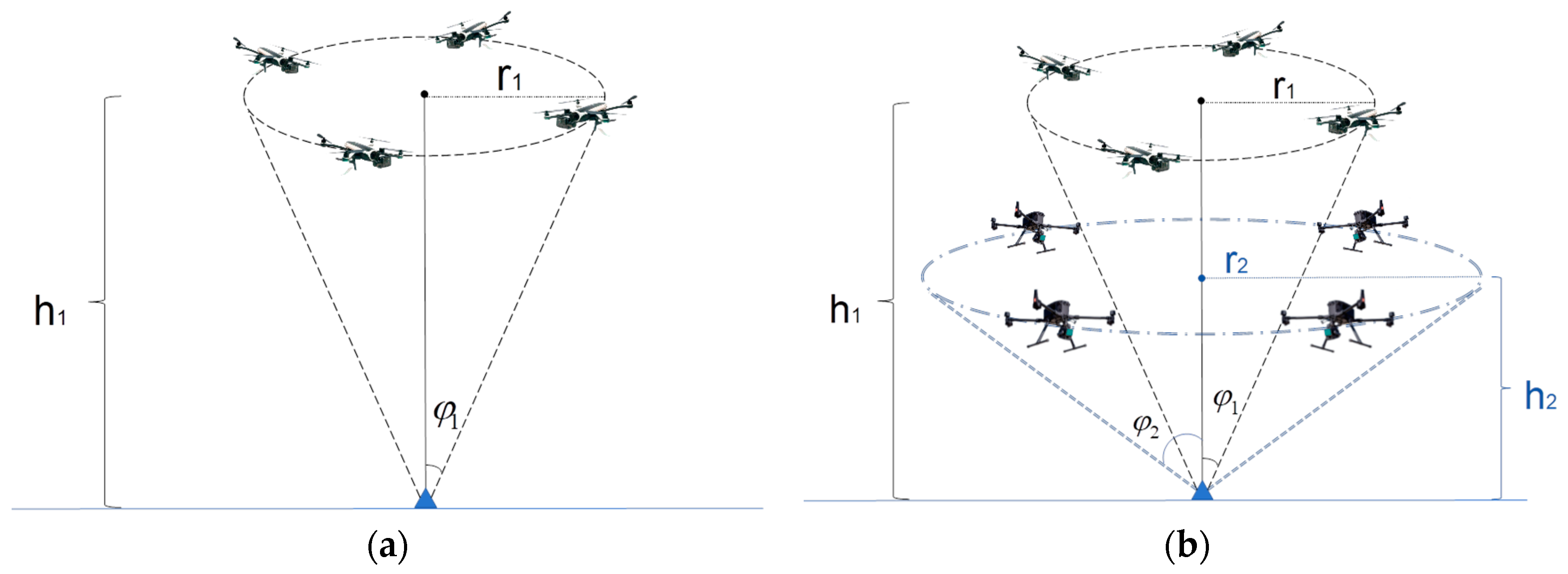
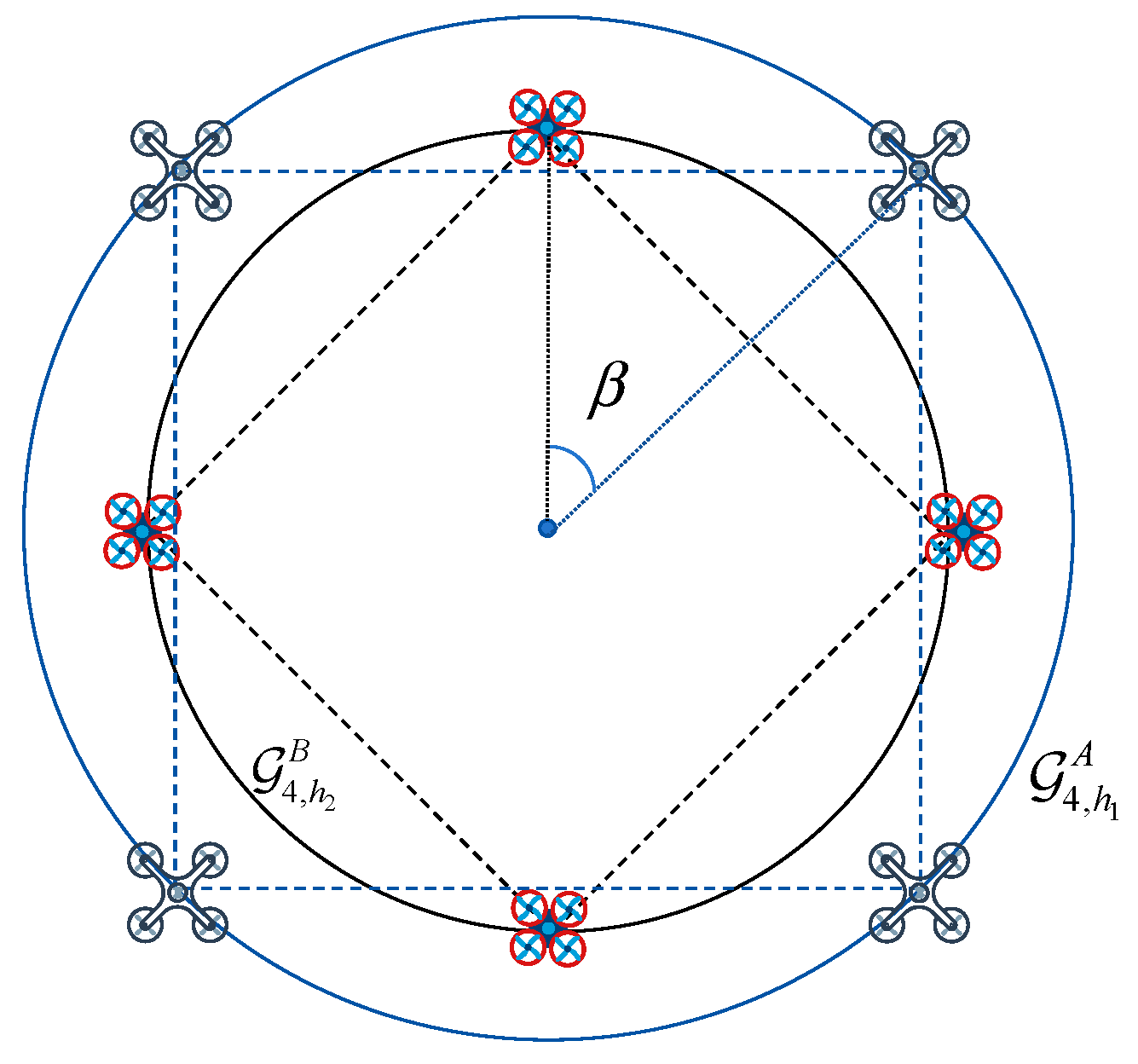
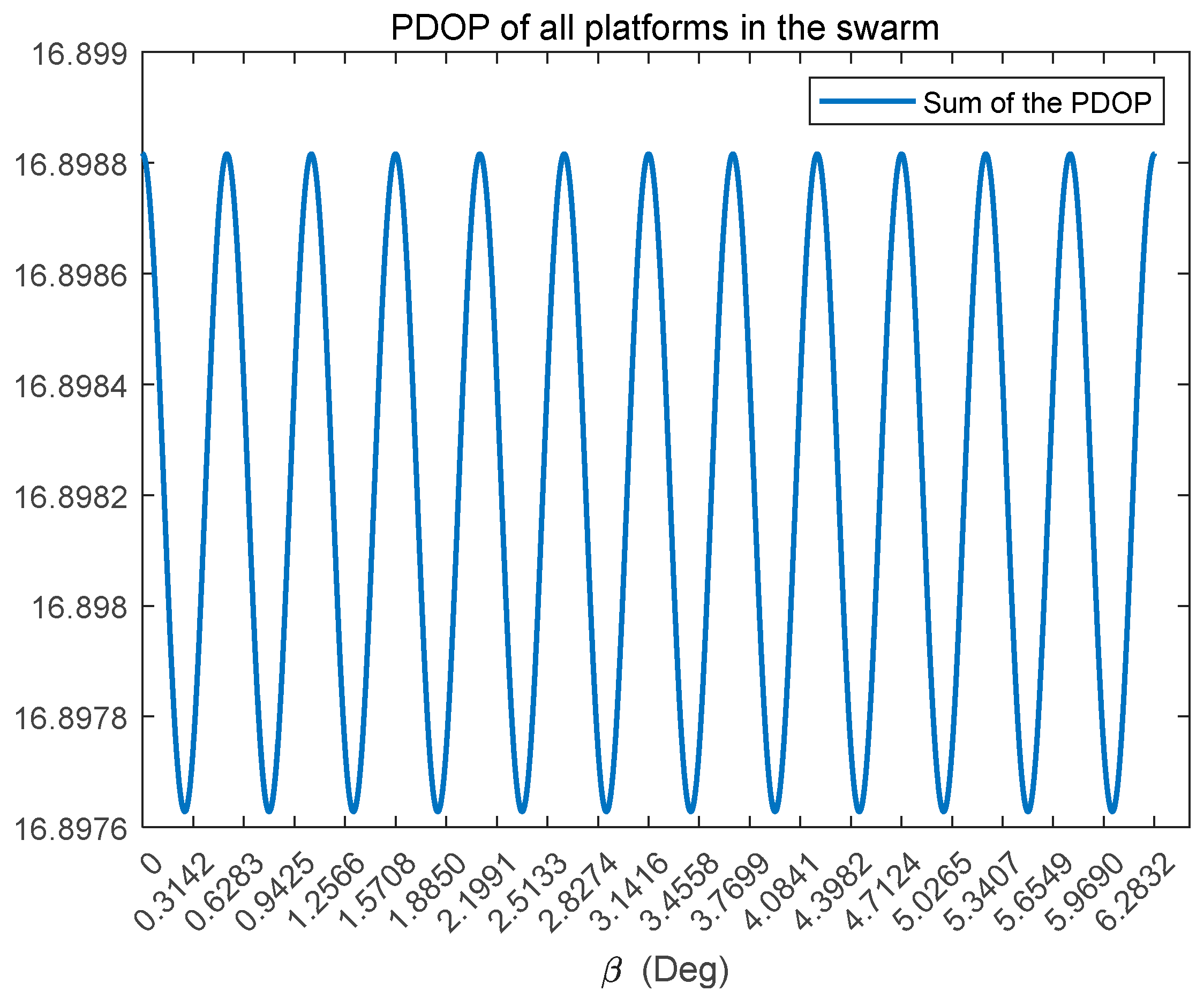
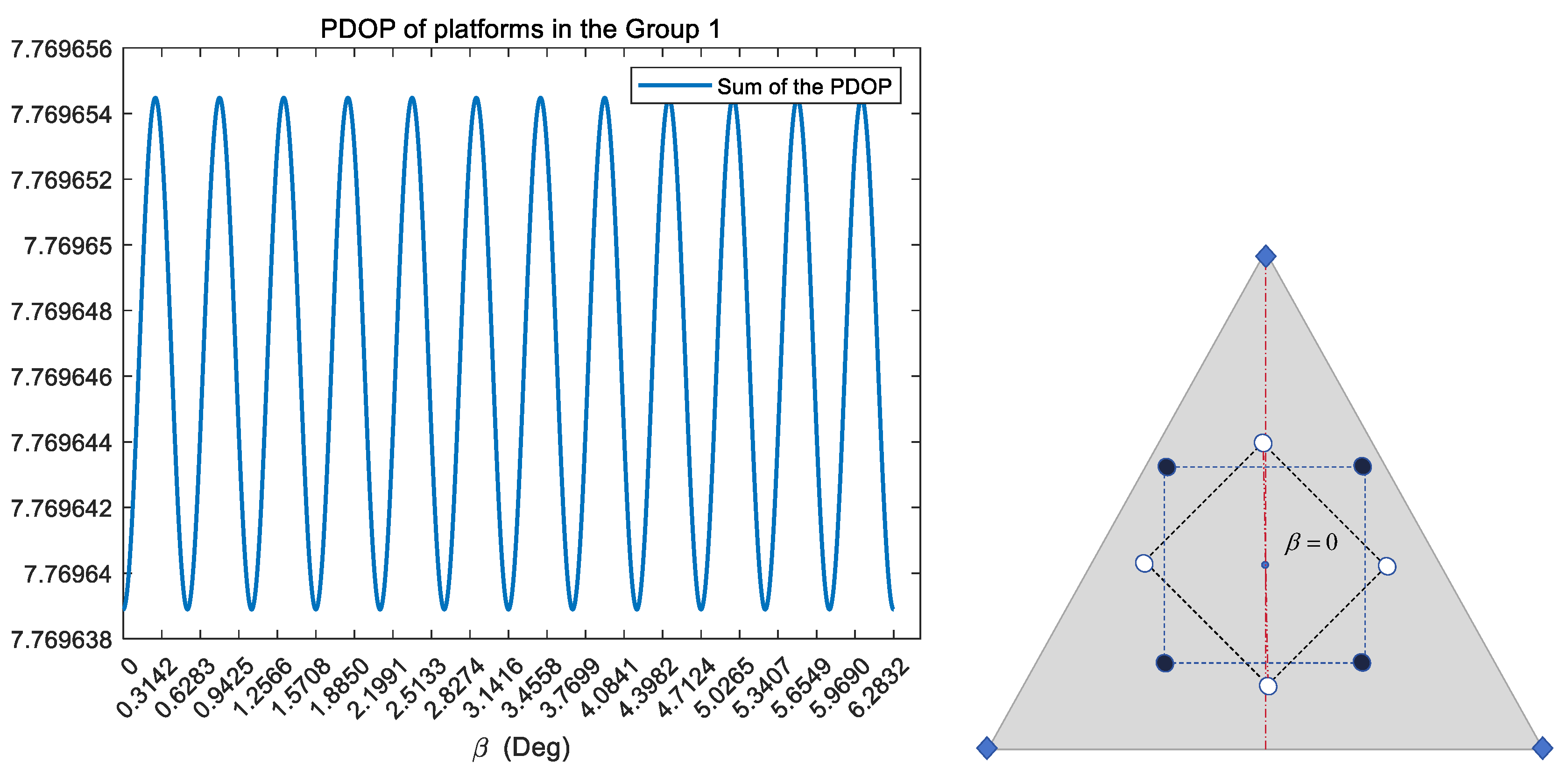
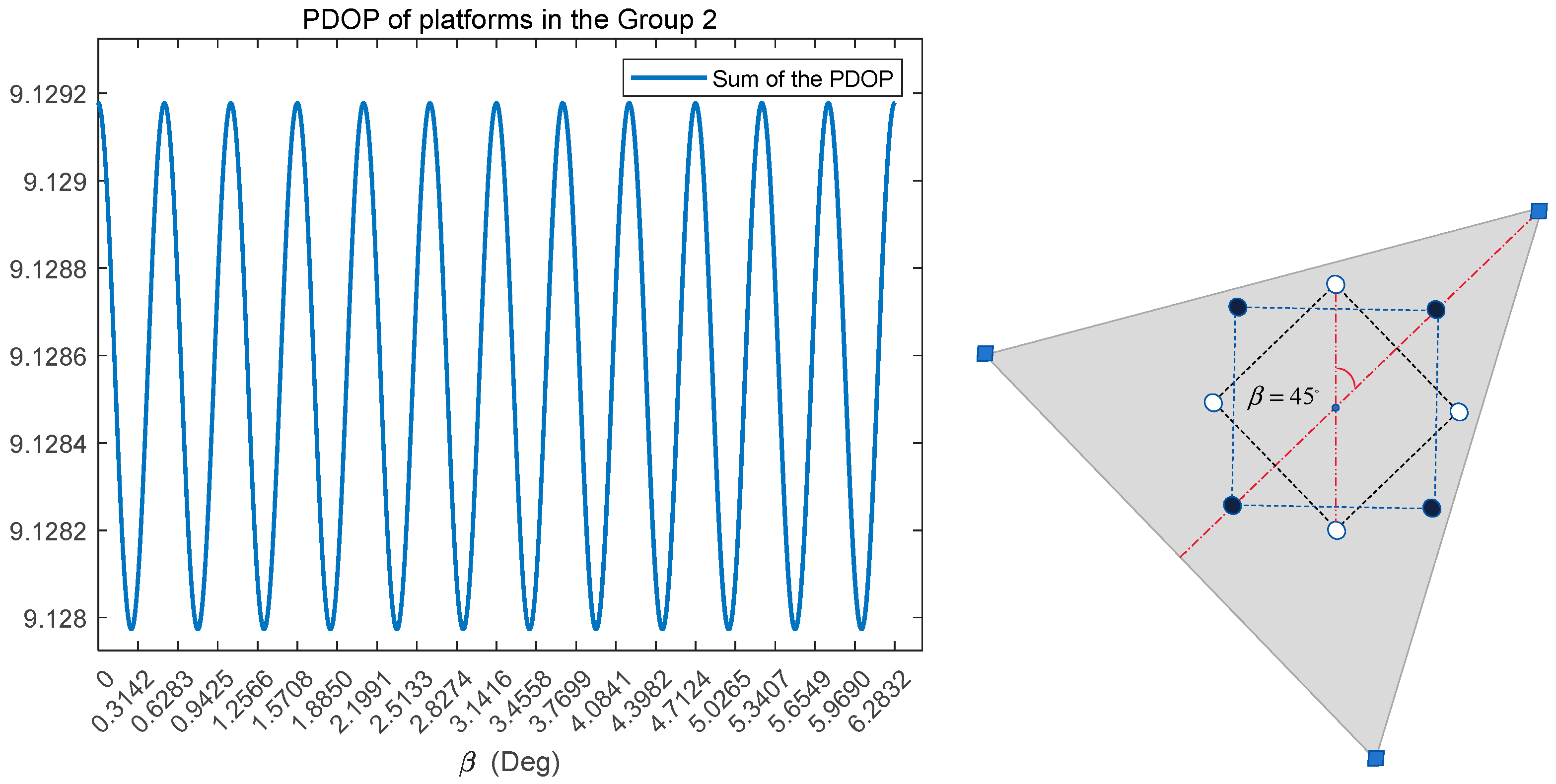
2.1.4. Conditions for Lowest DOP of Nested Cone Configuration
- , i.e., if, , will hold.
- For any , at the same time. represents the new configuration by rotating 180° around target point .
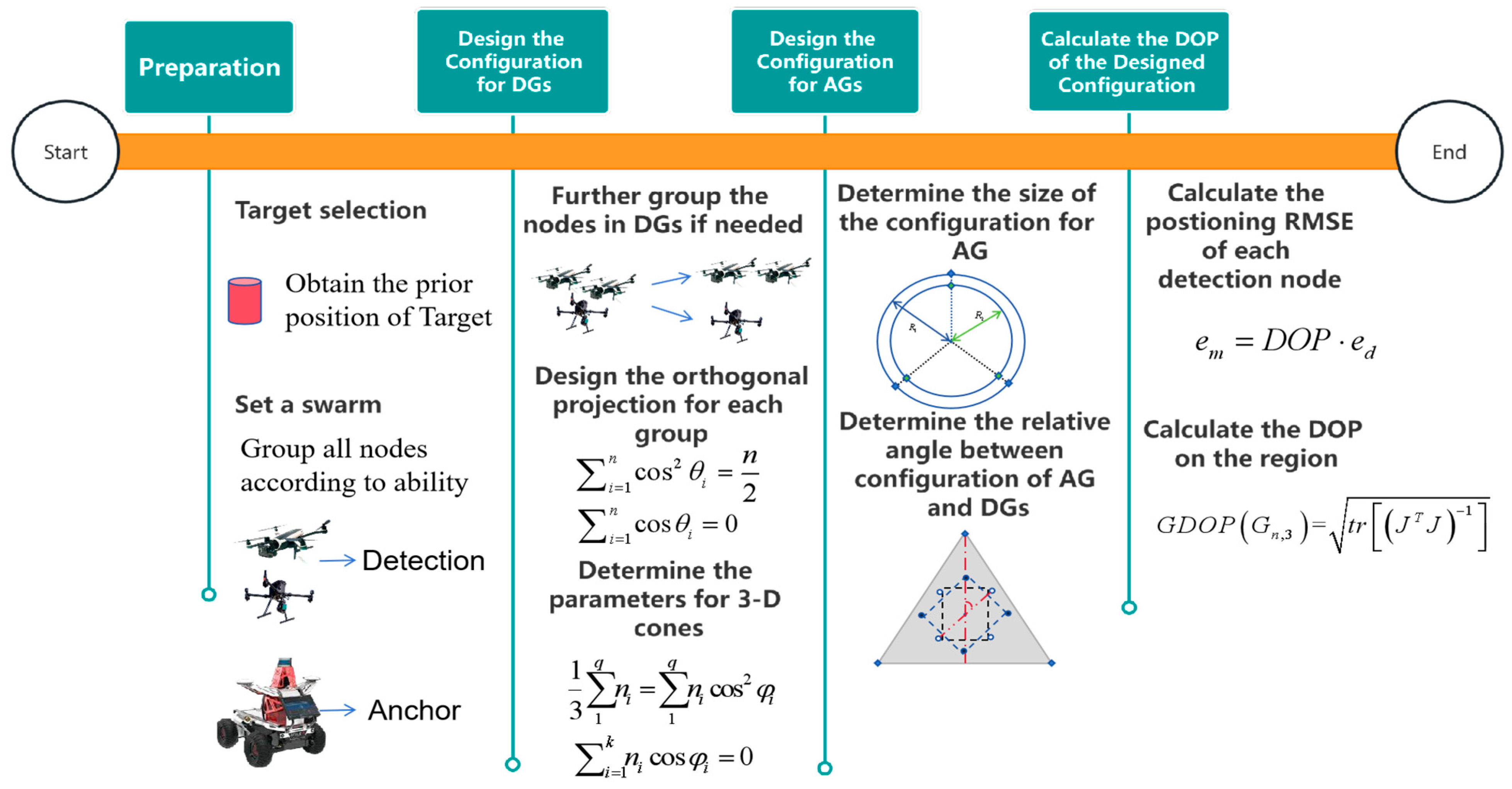
2.2. The Method to Design Coaxial Nested Cone Configuration for Heterogeneous Swarms with Minimum DOP
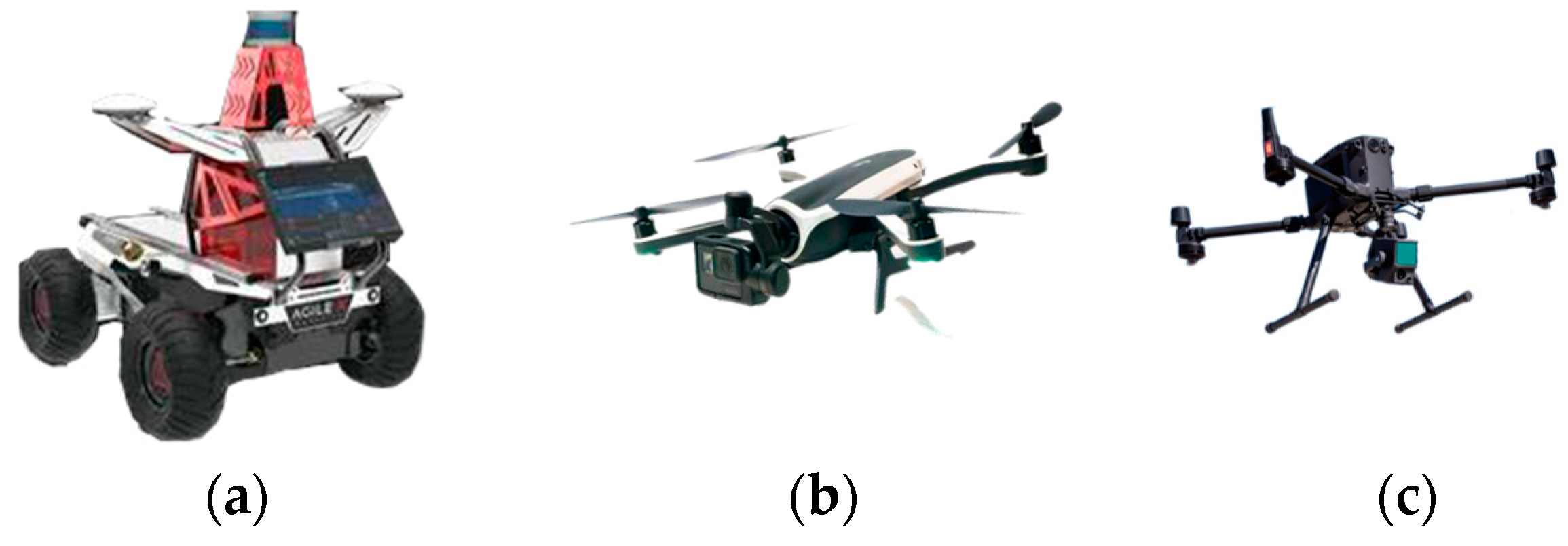
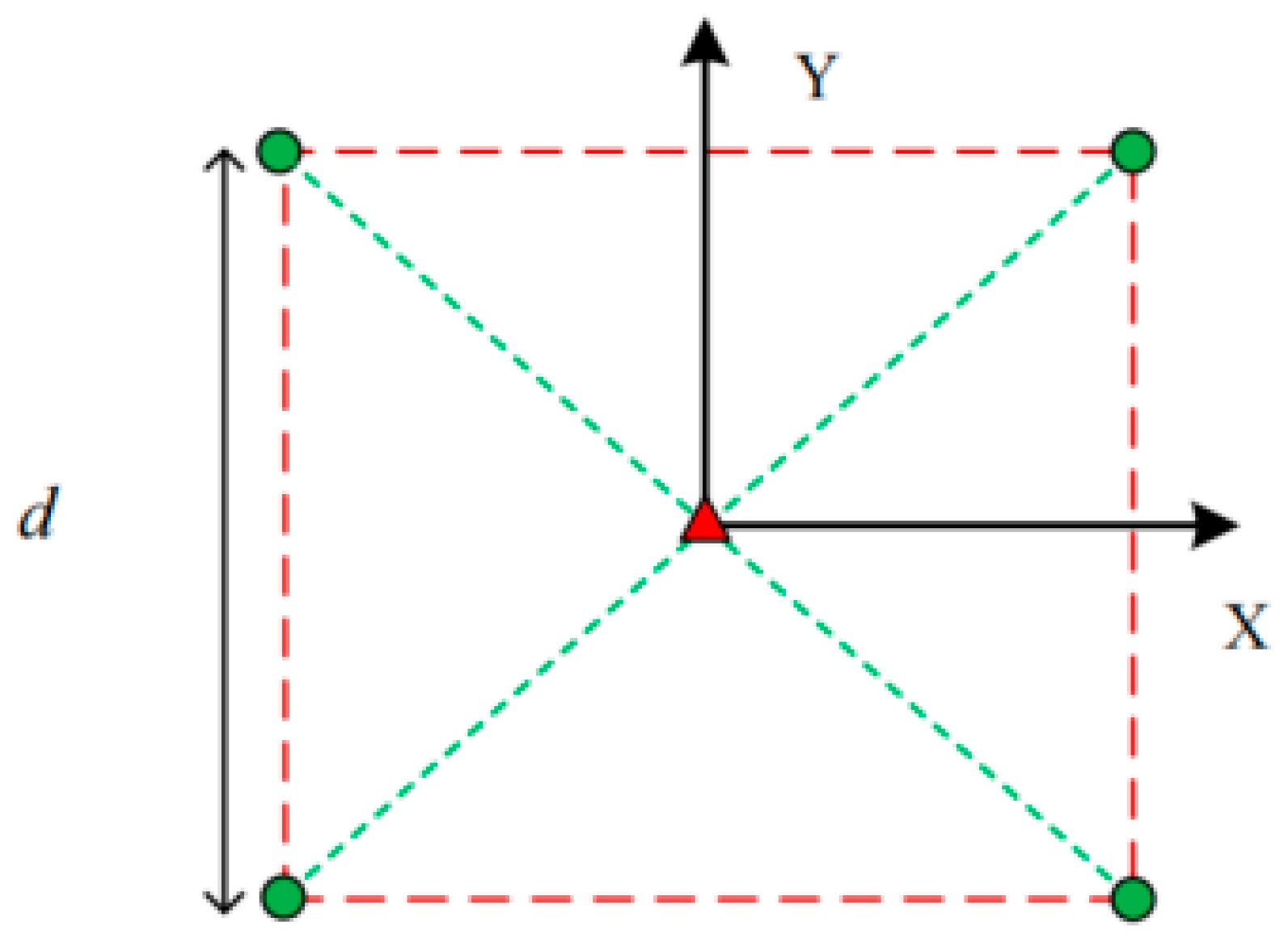
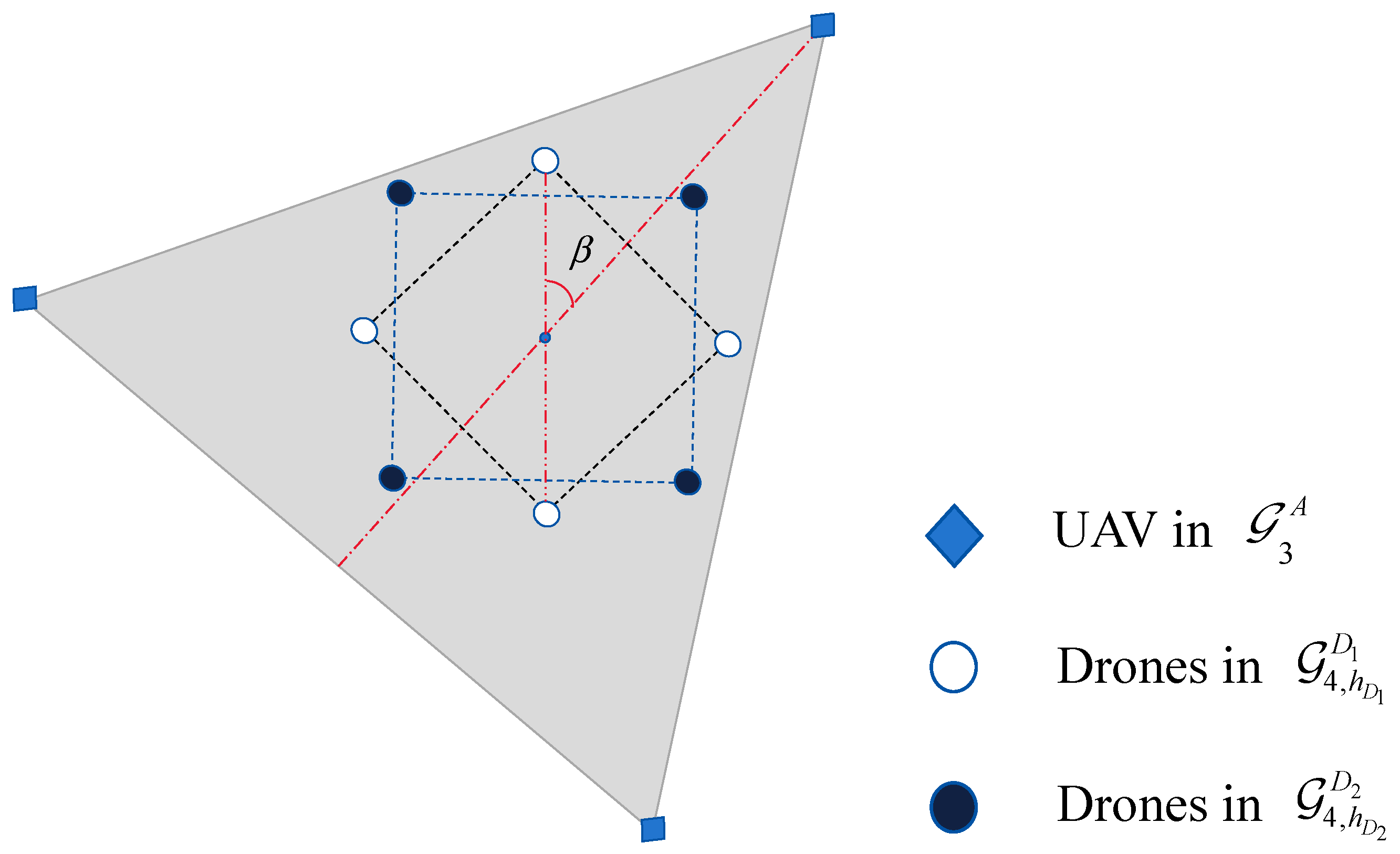
2.2.1. The Set of the Swarm in the Research
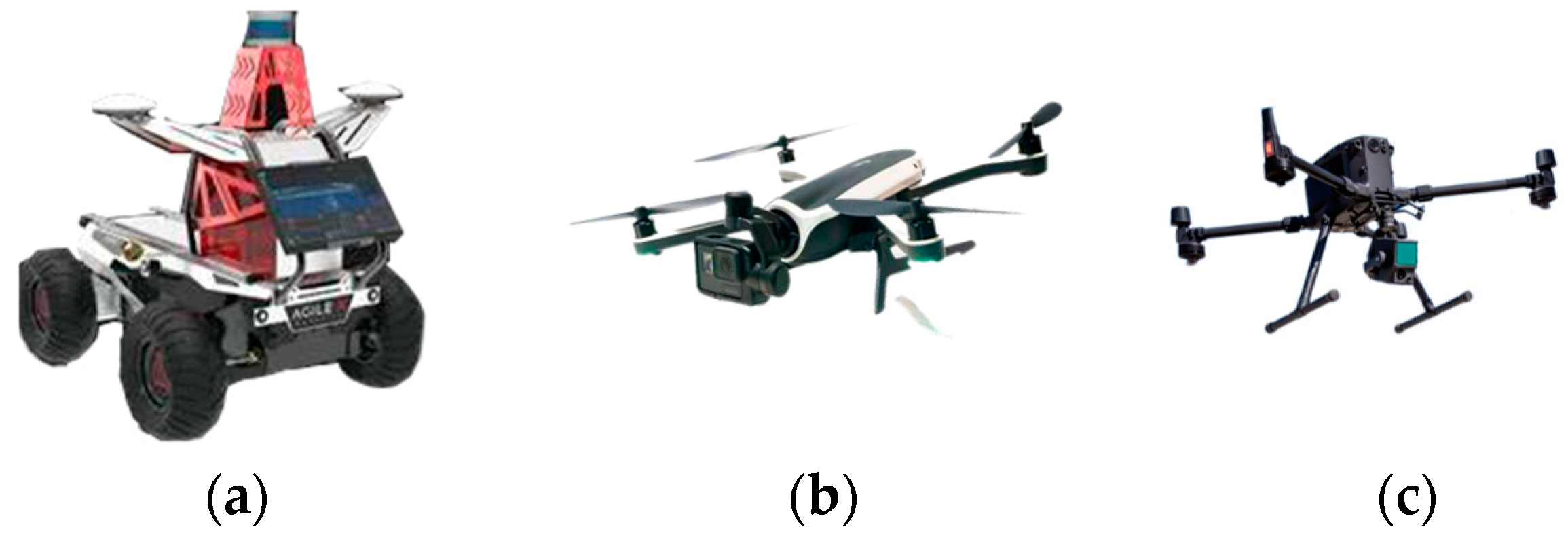
- Four miniature drones equipped with UWB and range finder.
- Four large drones equipped with UWB and range finder.
- Three UGVs equipped with UWB and high-precision inertial navigation system.
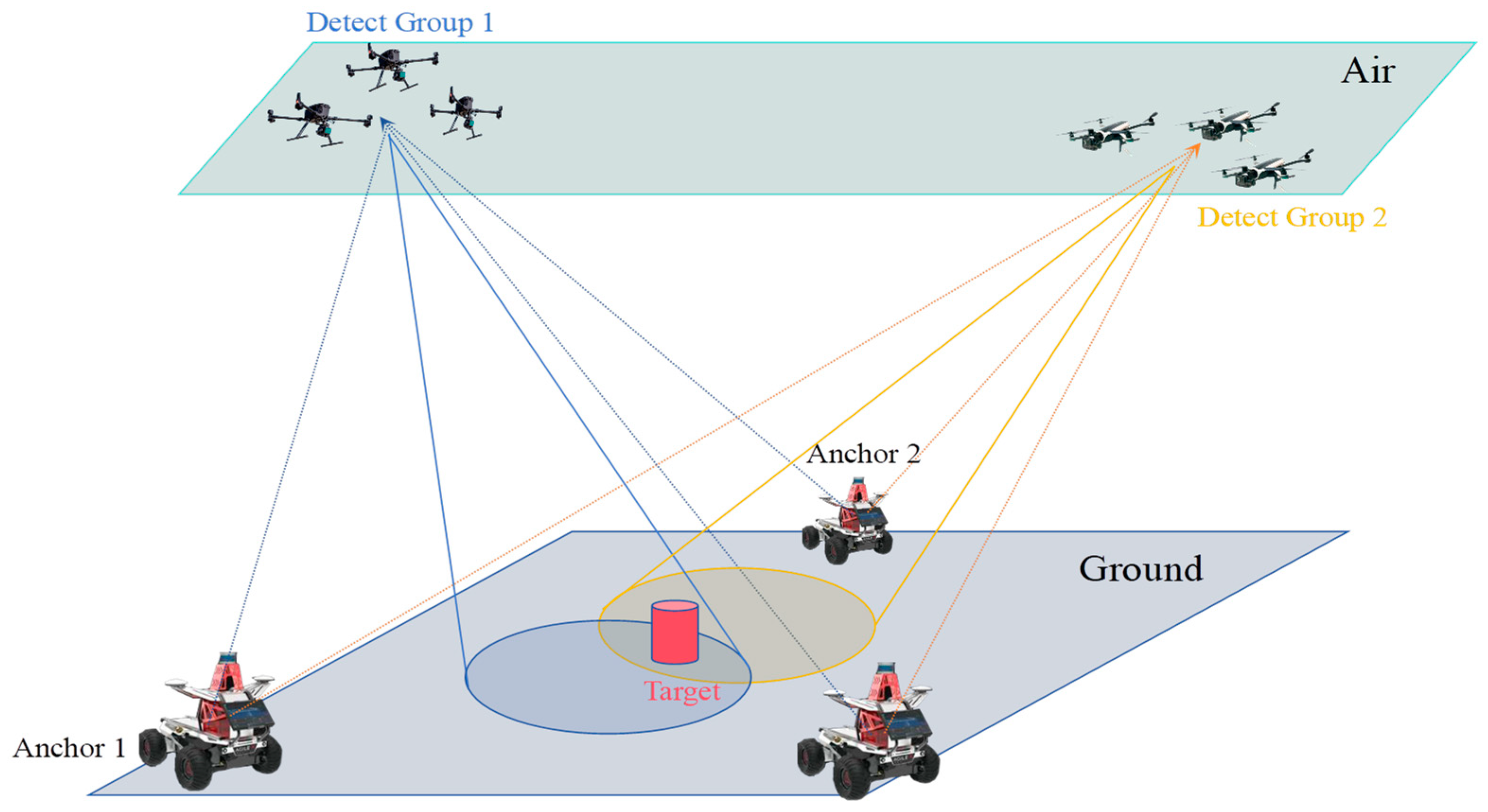
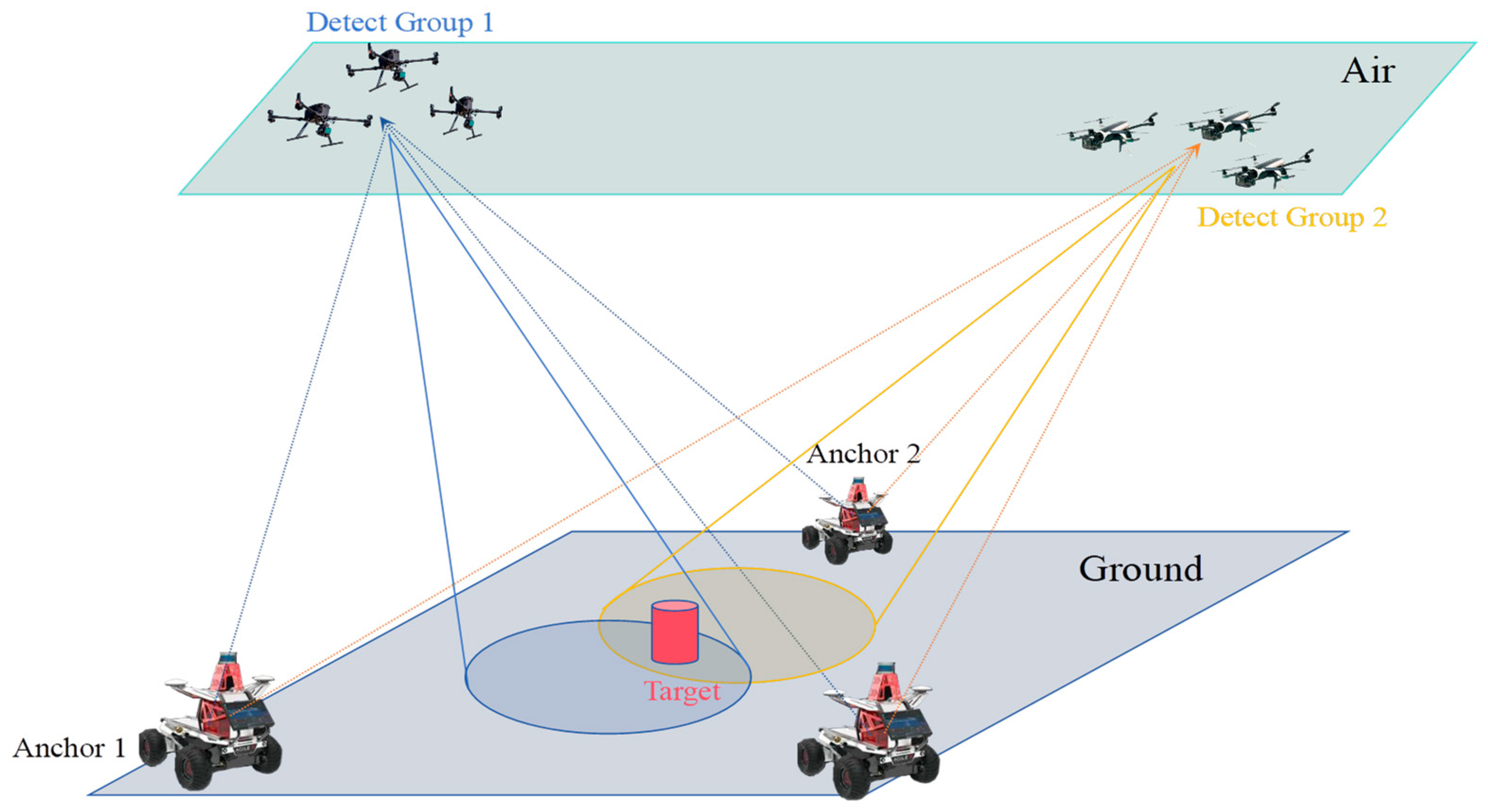
2.2.2. Arrangement for Nodes in the Cooperative Heterogeneous Unmanned Swarm
- The communication between all nodes in the swarm is completely smooth, and there is no multipath or clutter in time of arrival (TOA) measurements.
- Each node has a unique identification, i.e., the problem of data association has been solved, and each measurement is correctly associated with the correct platform, which solves.
- The UGVs in are equipped with high-precision positioning equipment, which makes it possible to keep the positioning results in the local geographic coordinate system that will not diverge and remain within a certain error.
- The target is on the ground plane with 0 altitude.
3. Results
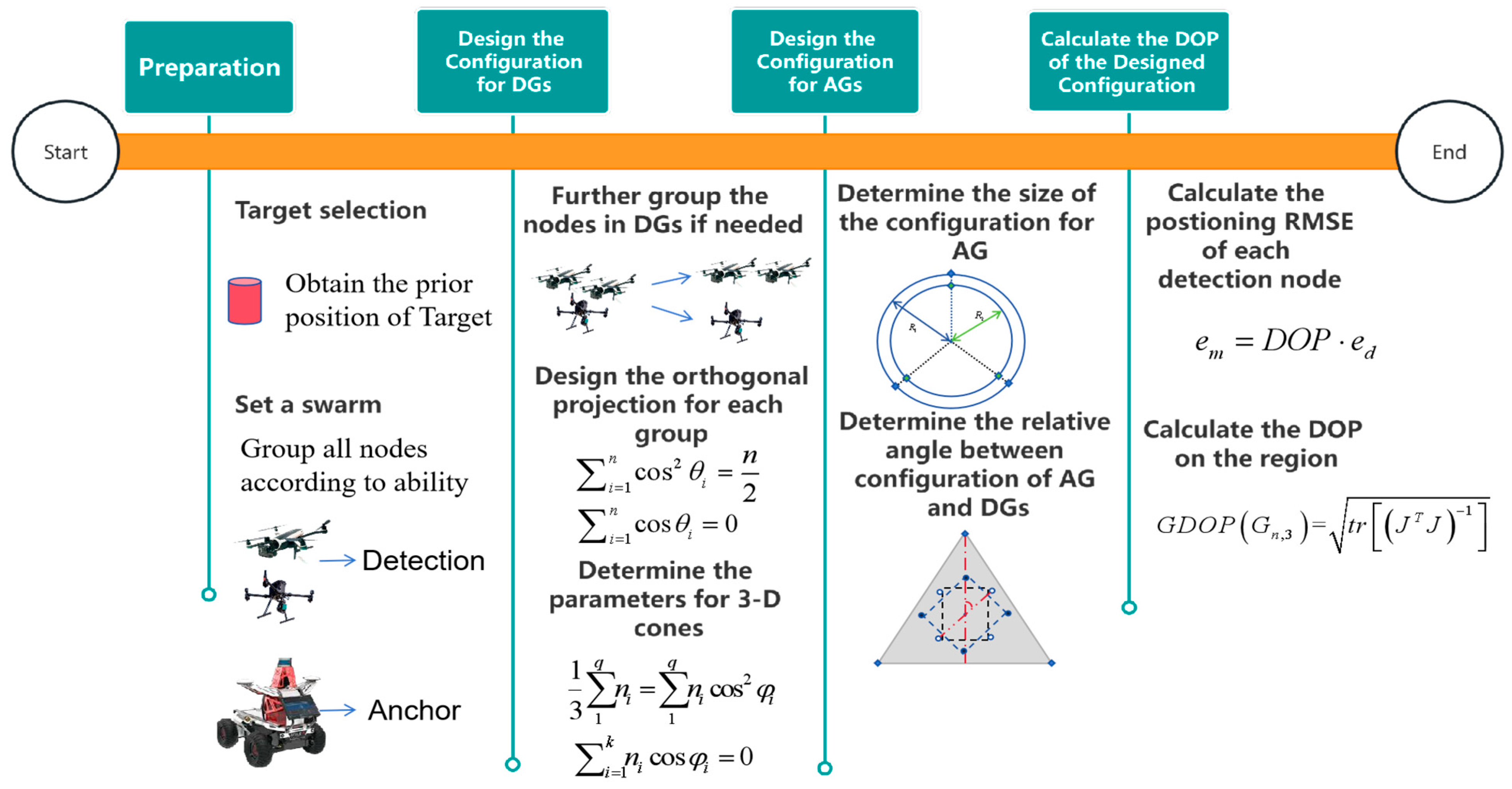
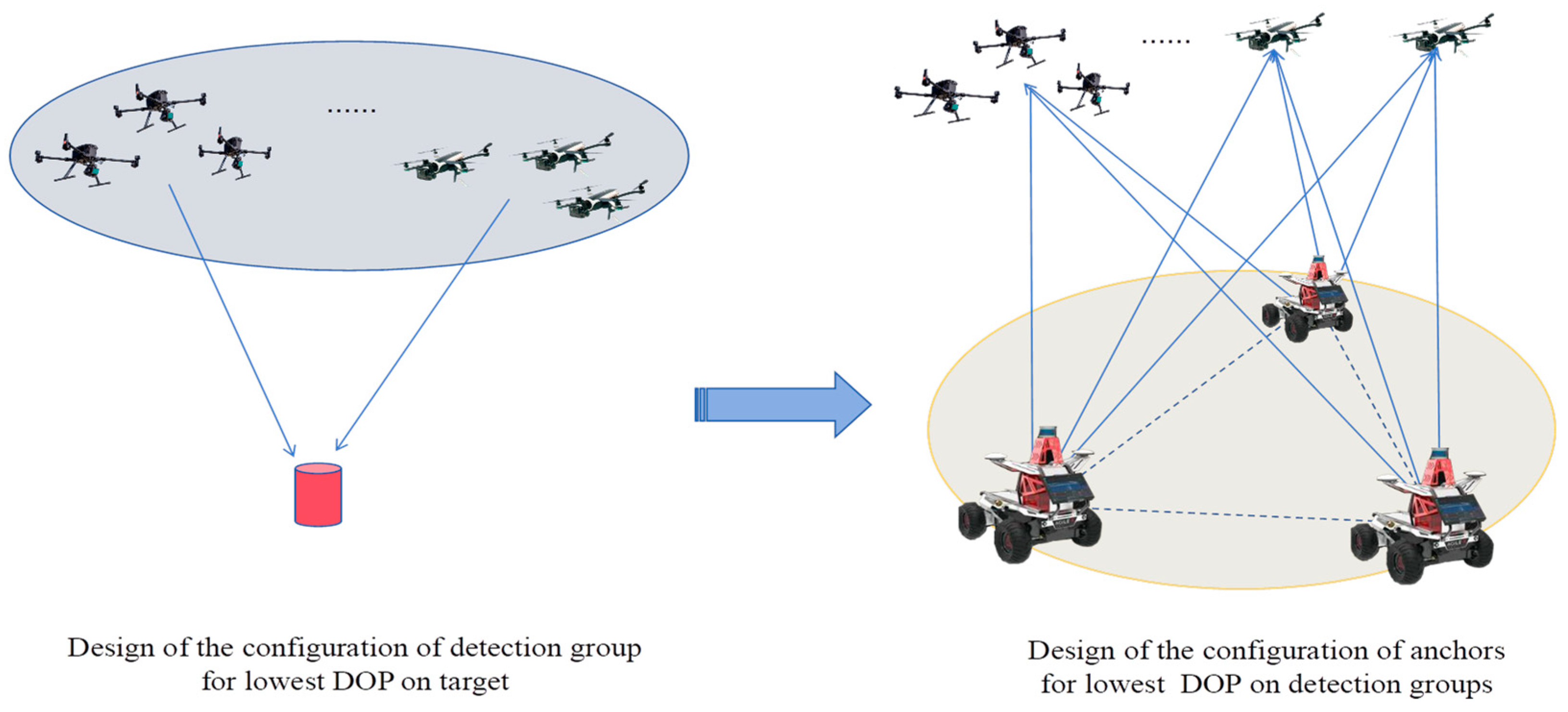
3.1. The Design of Configuration for DGs
3.1.1. Design of Configuration for Minimum DOP at the Target Point
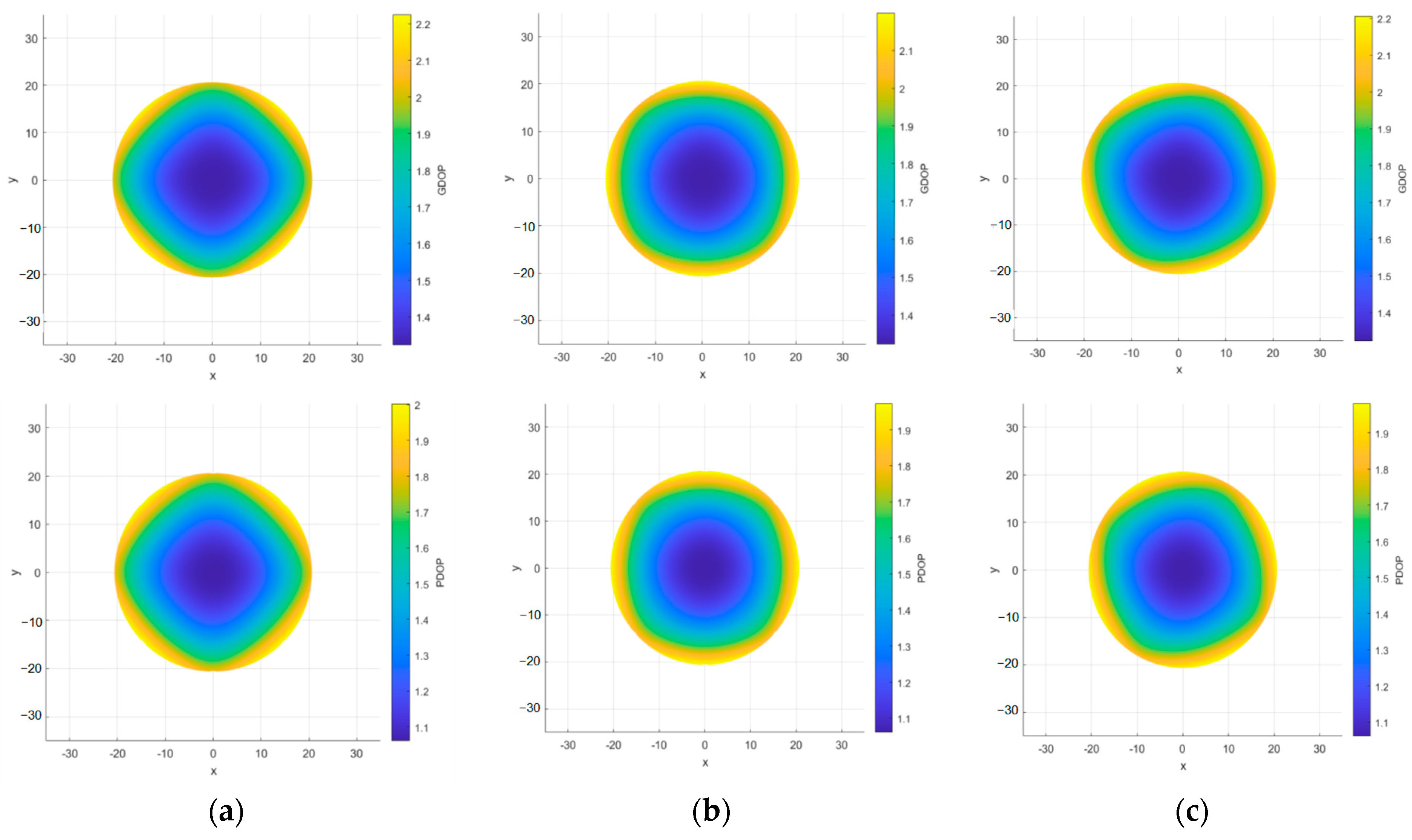
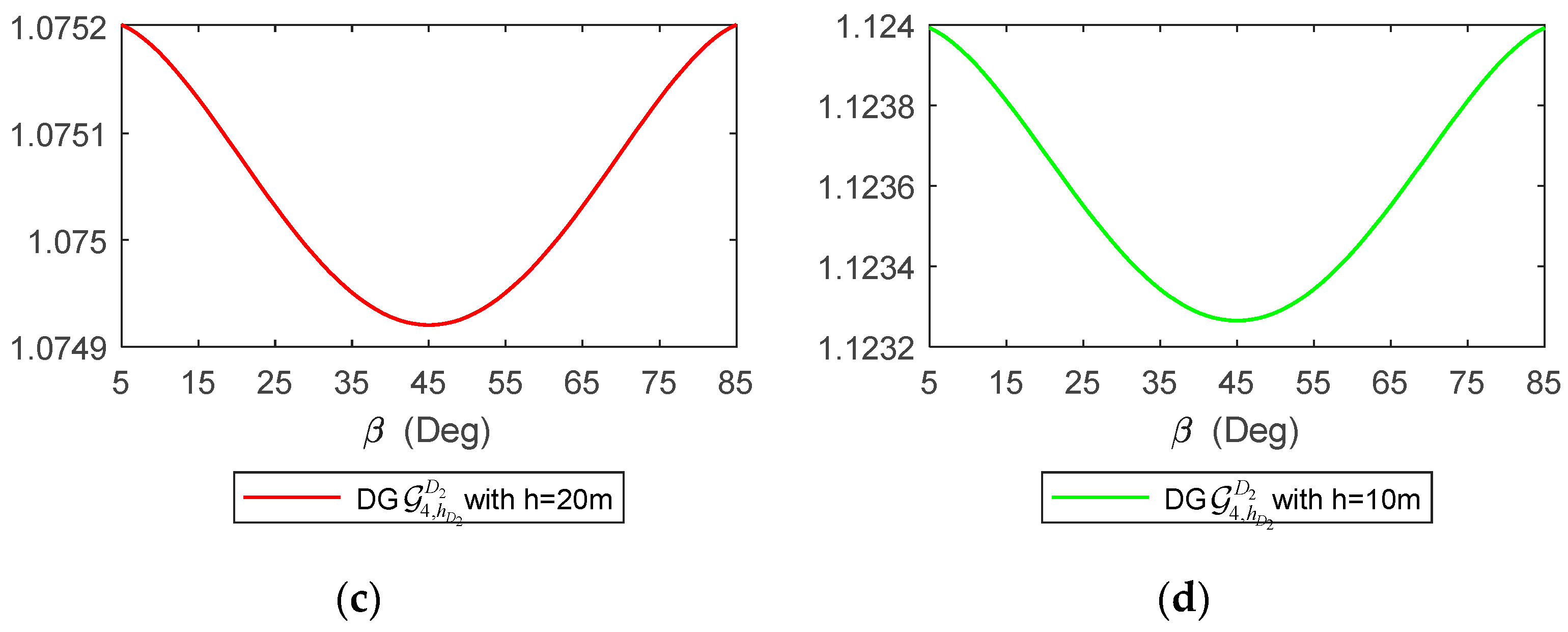
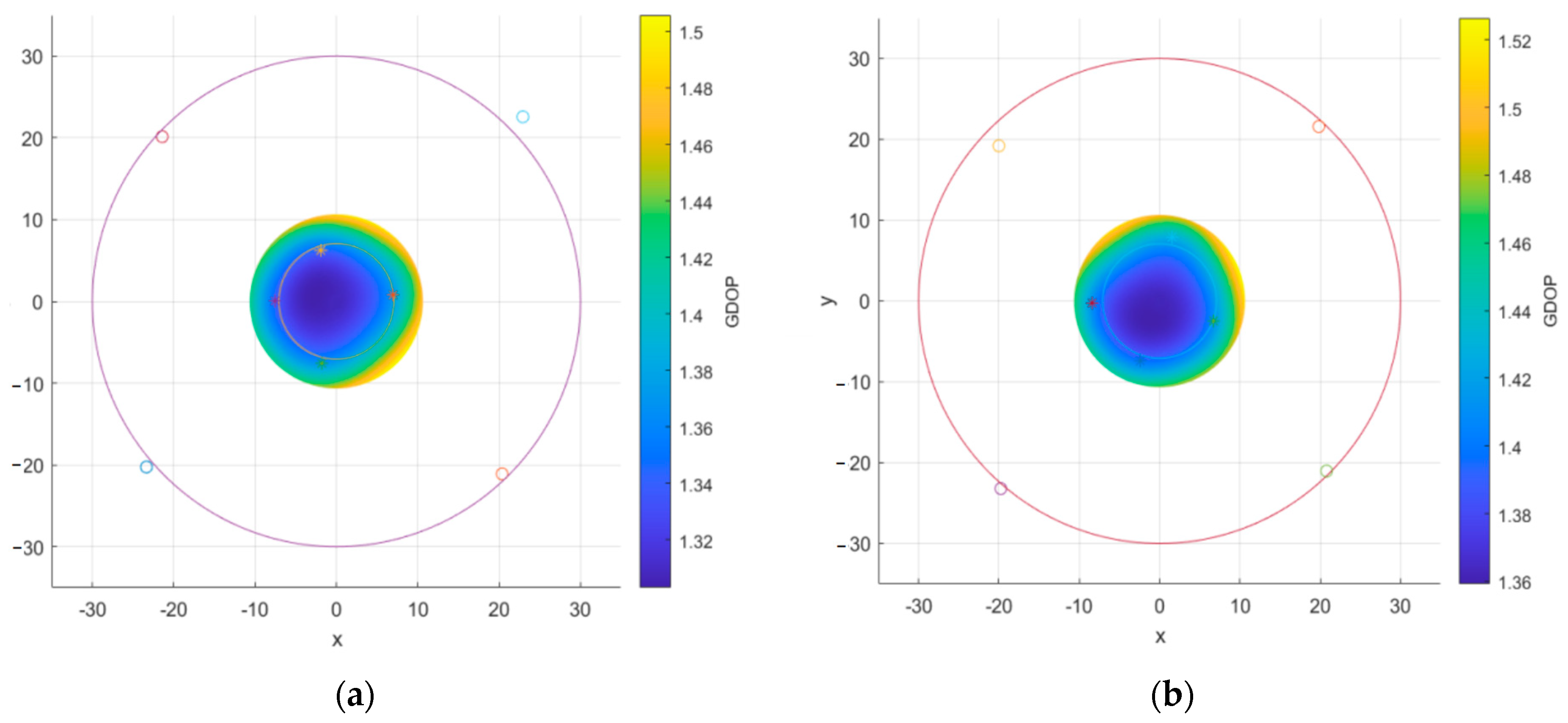
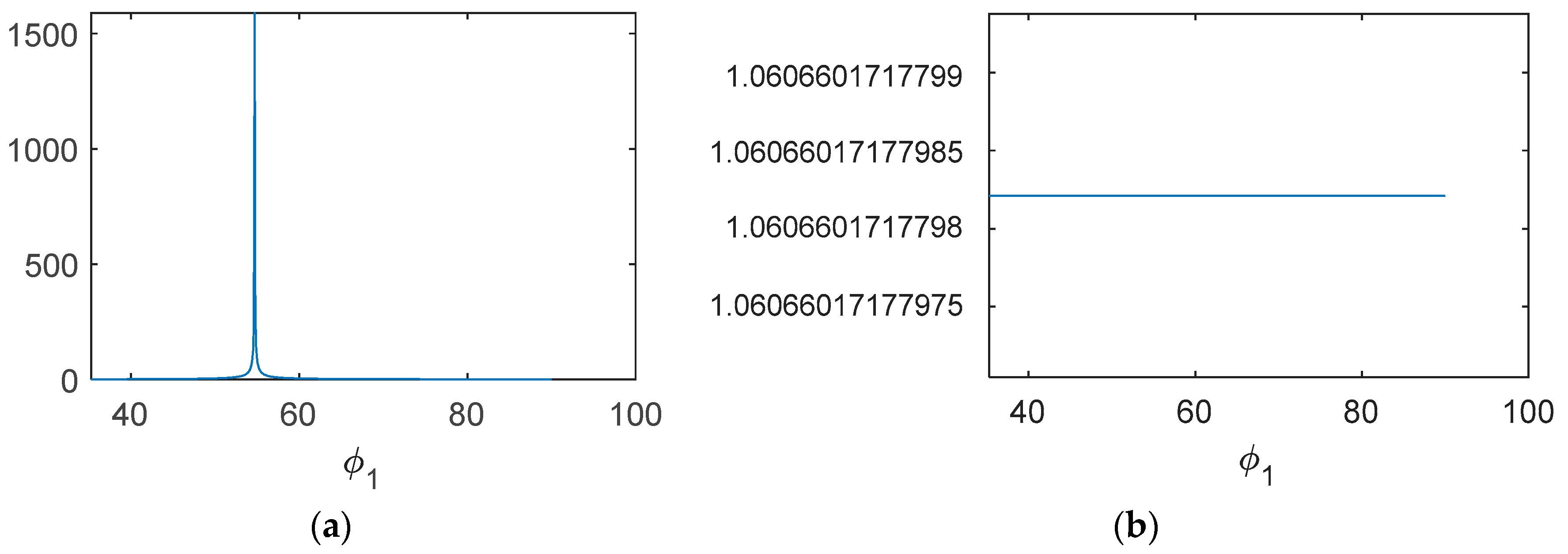
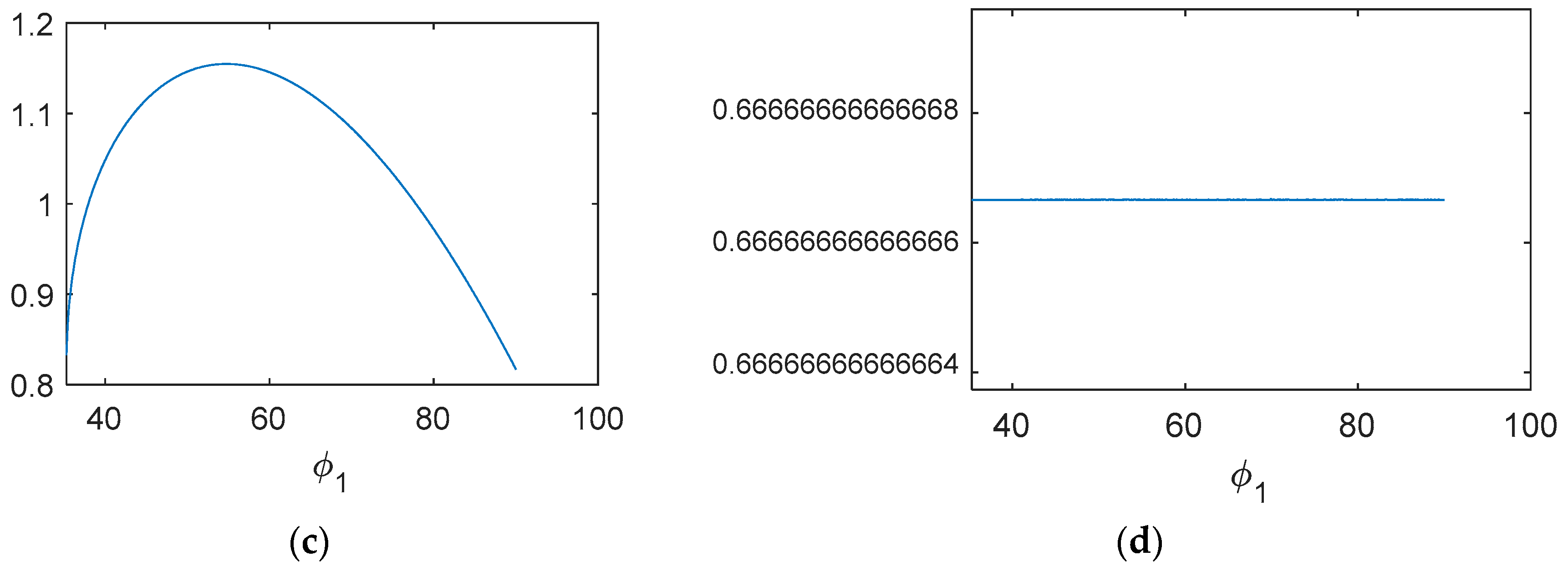
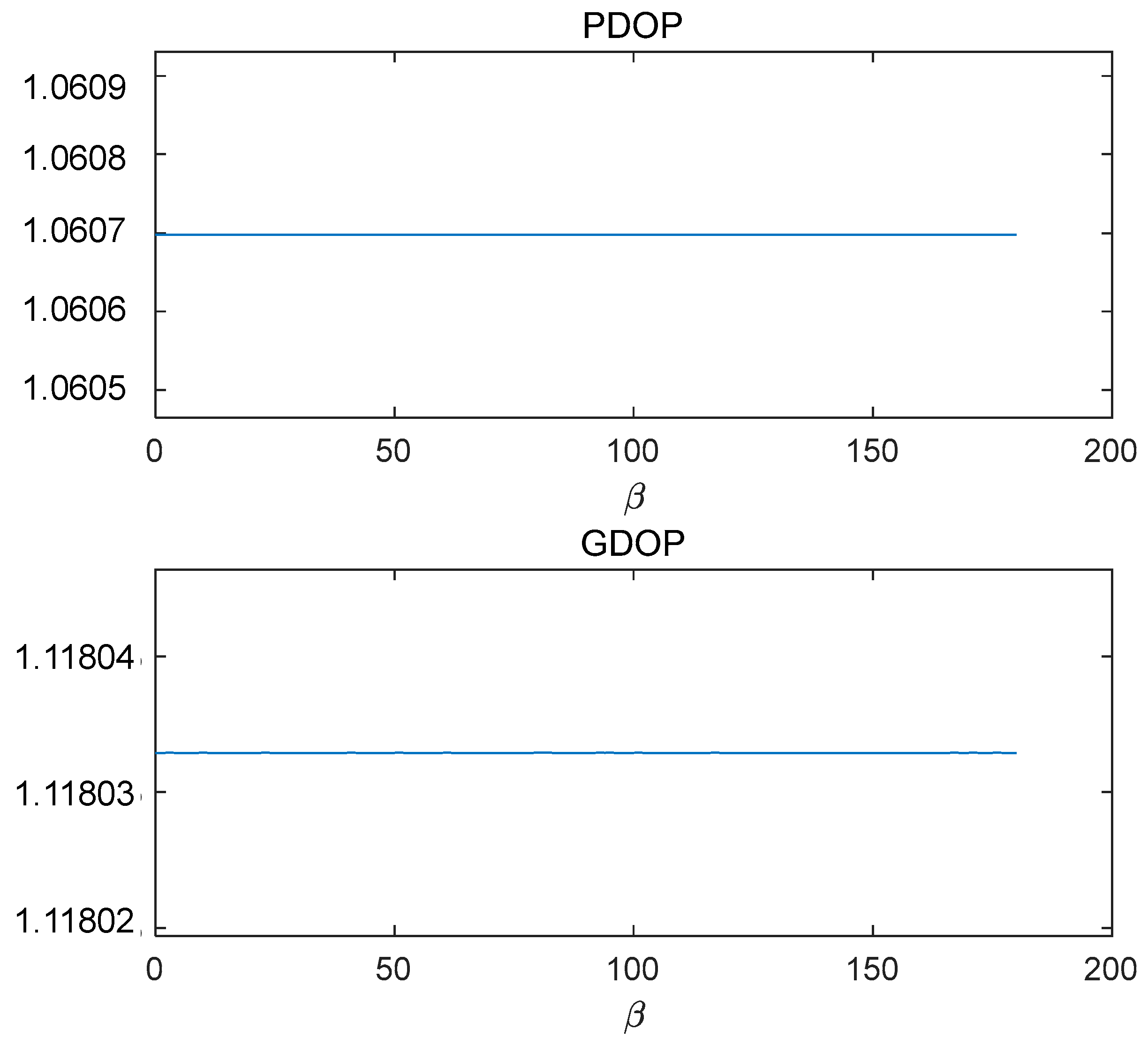
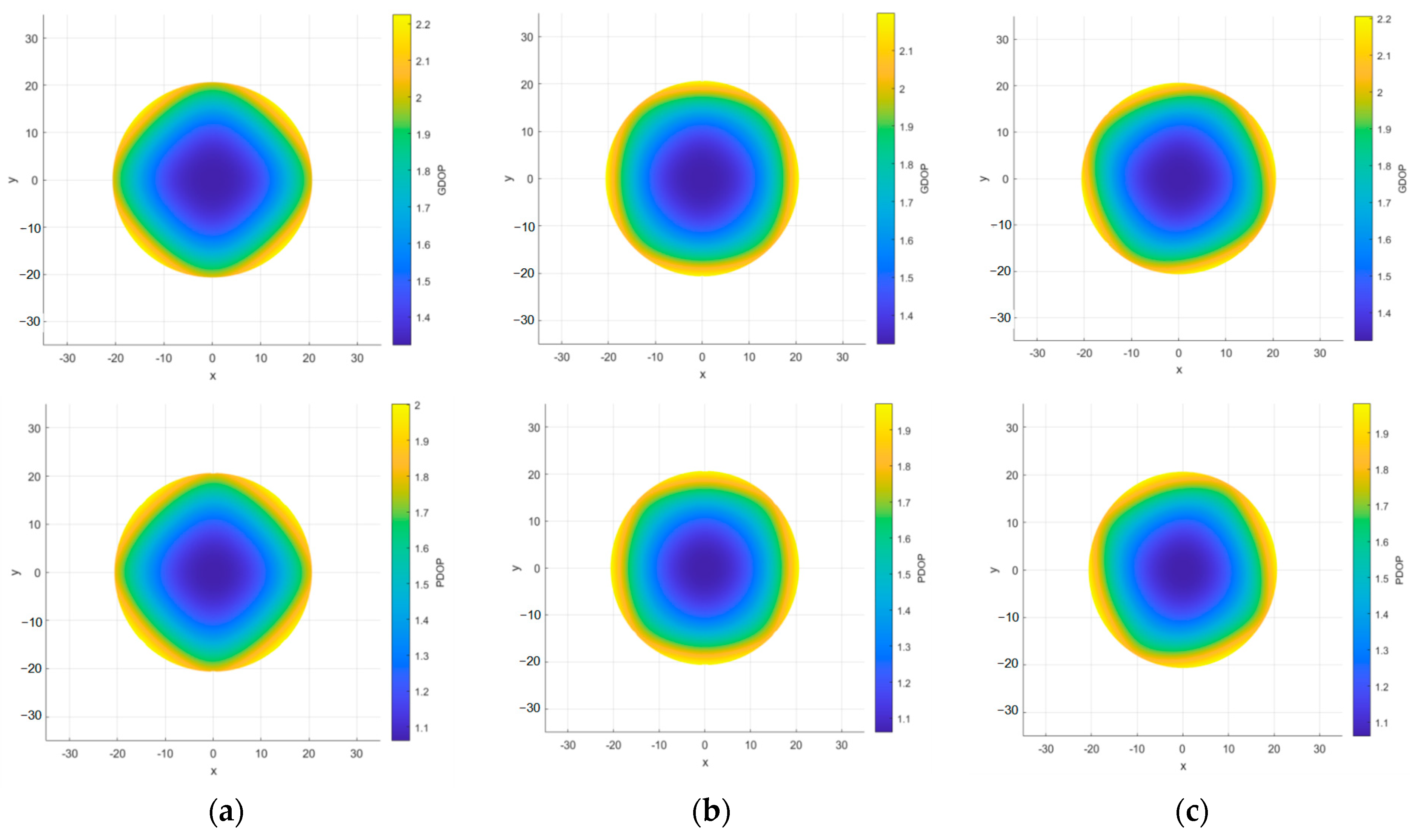
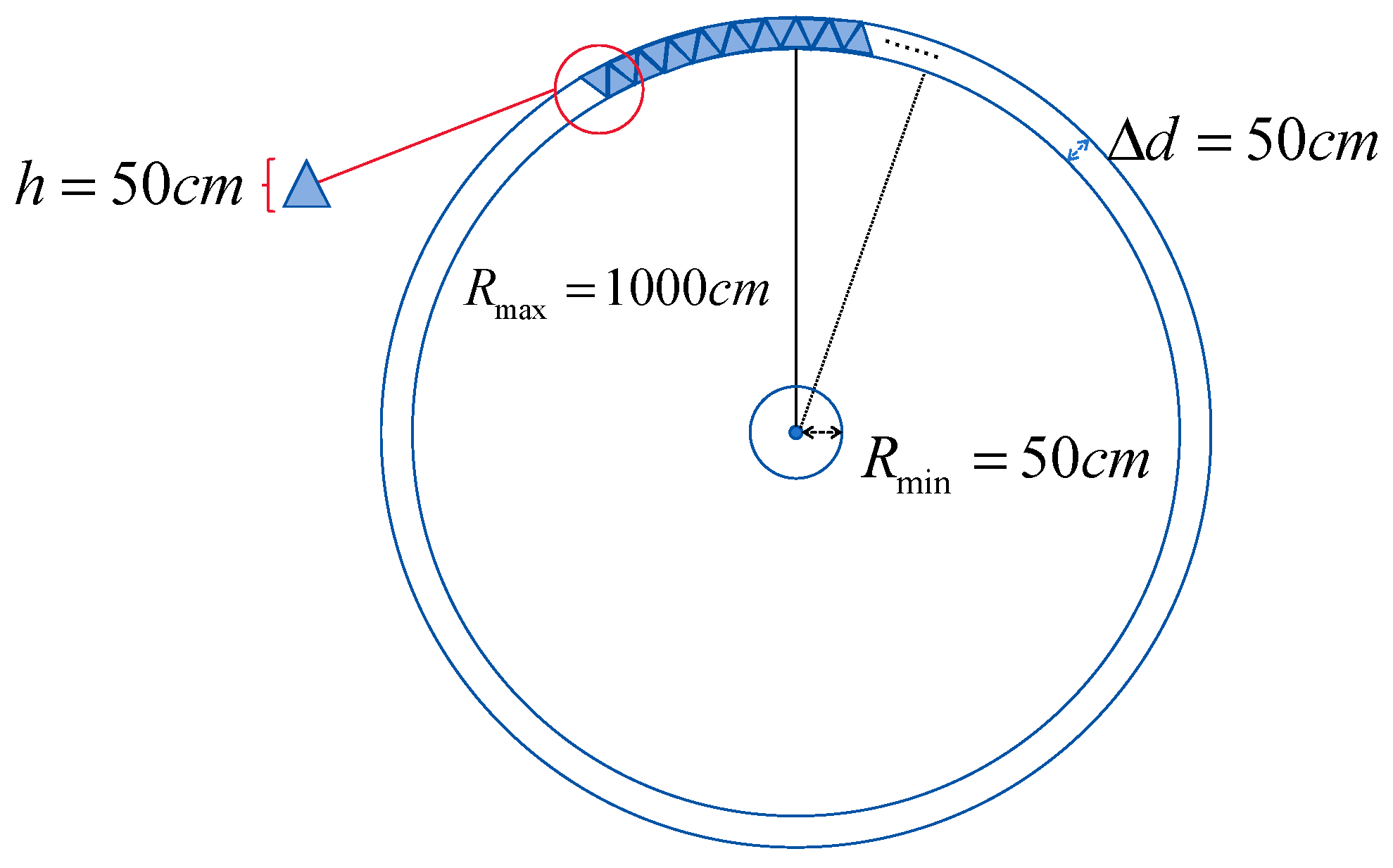
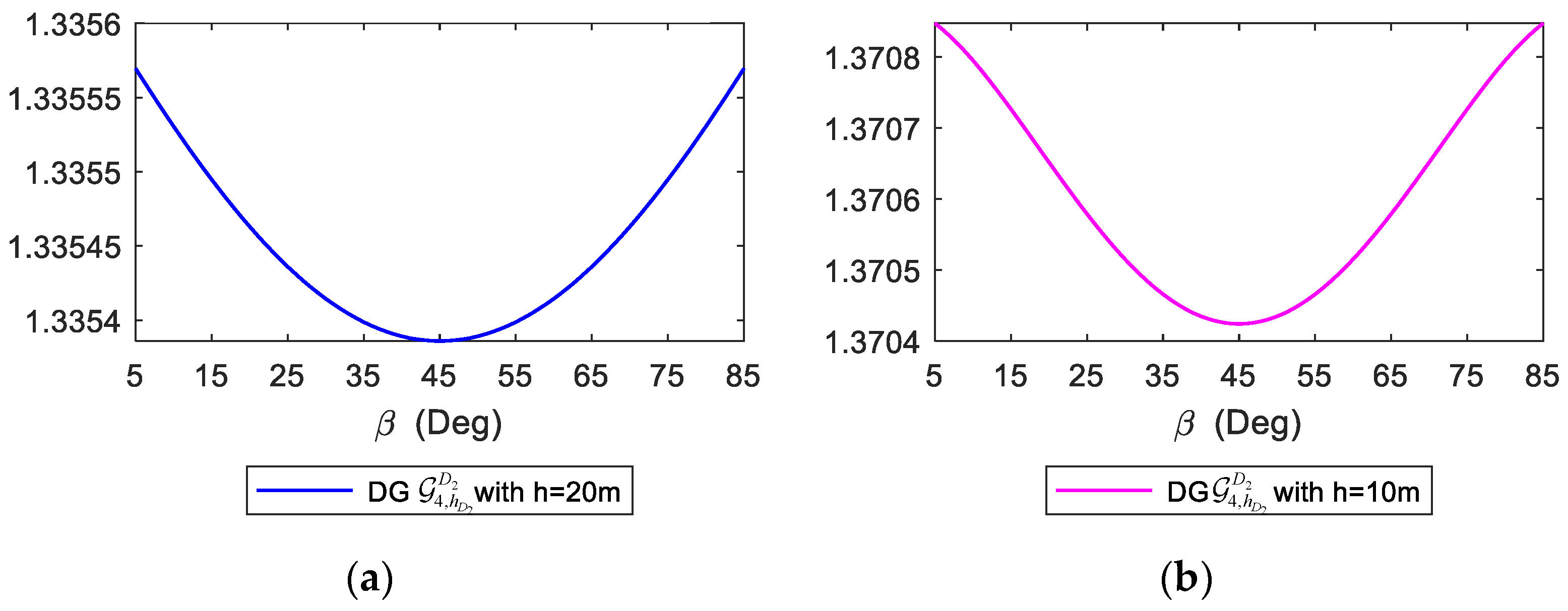
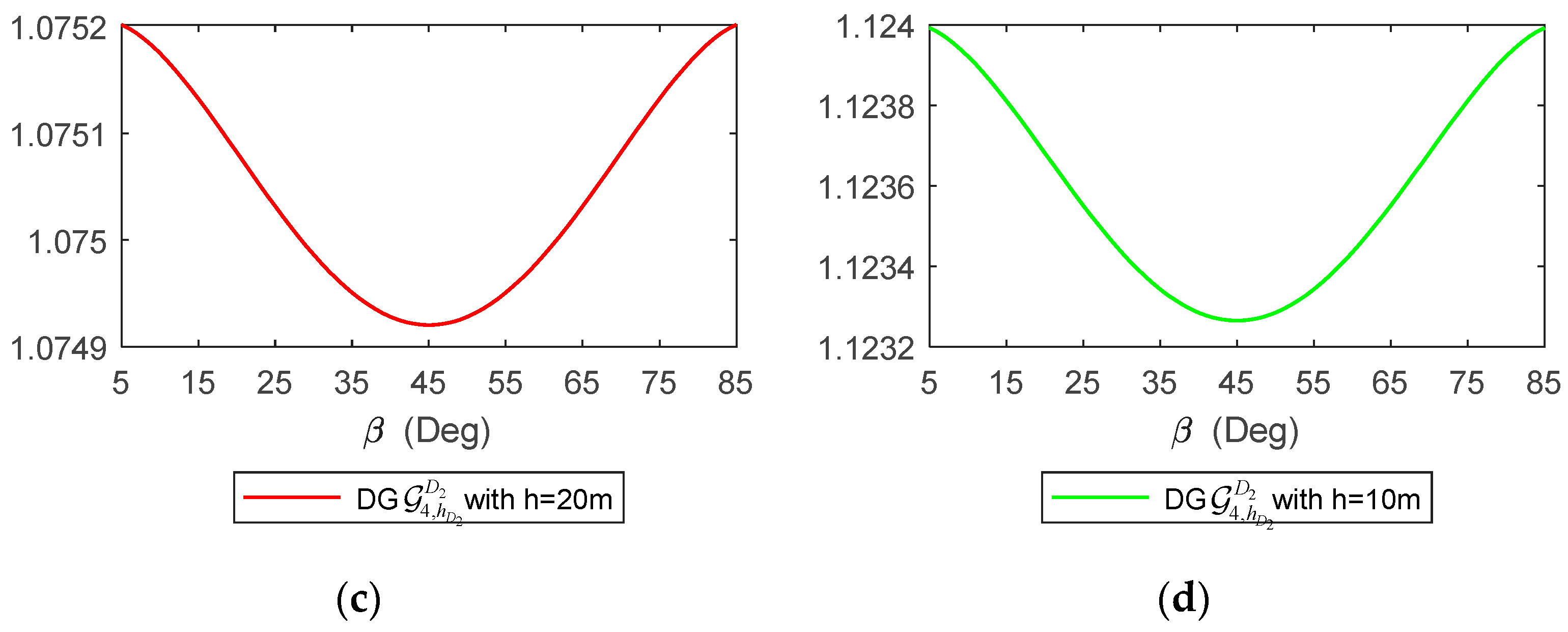
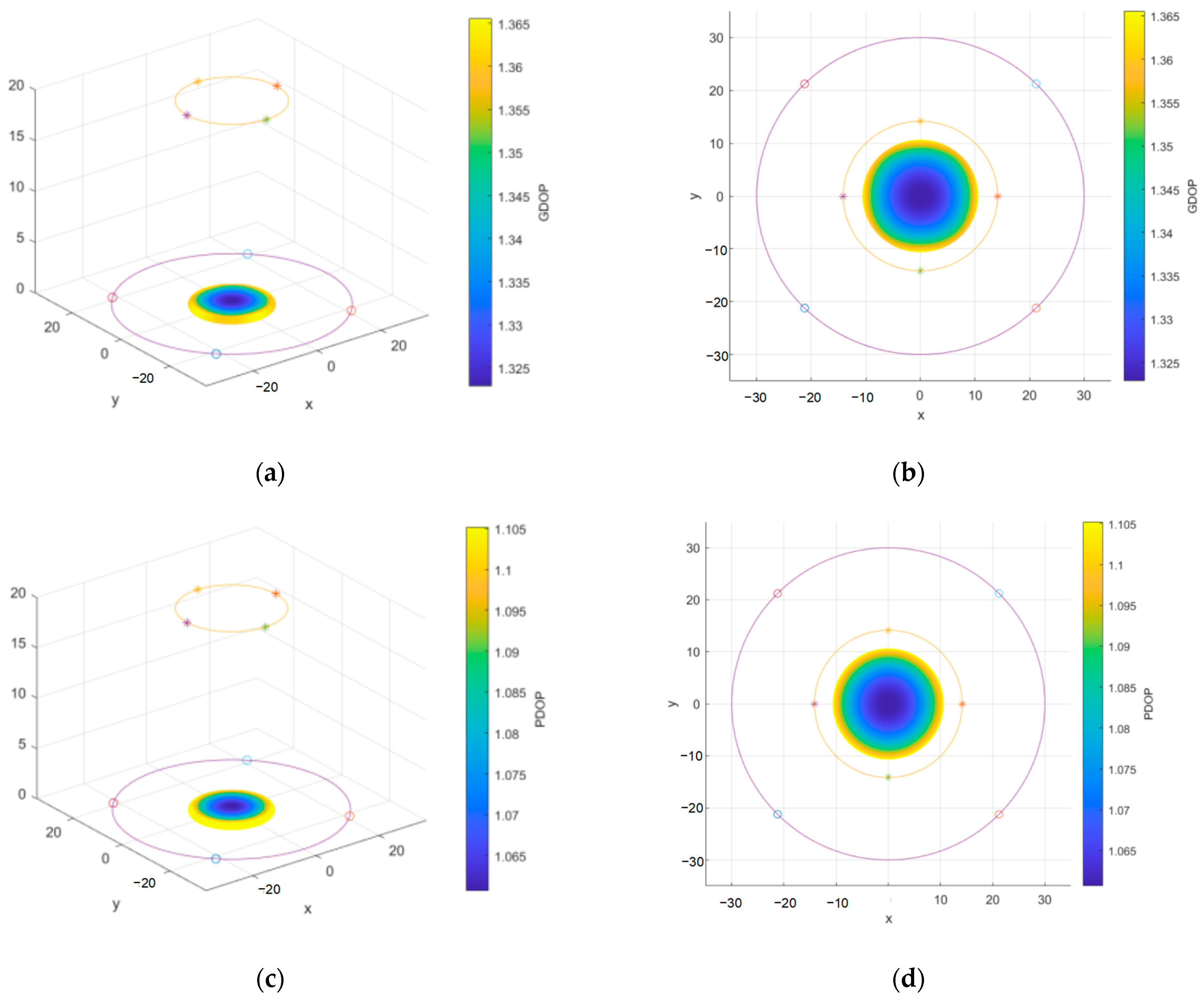
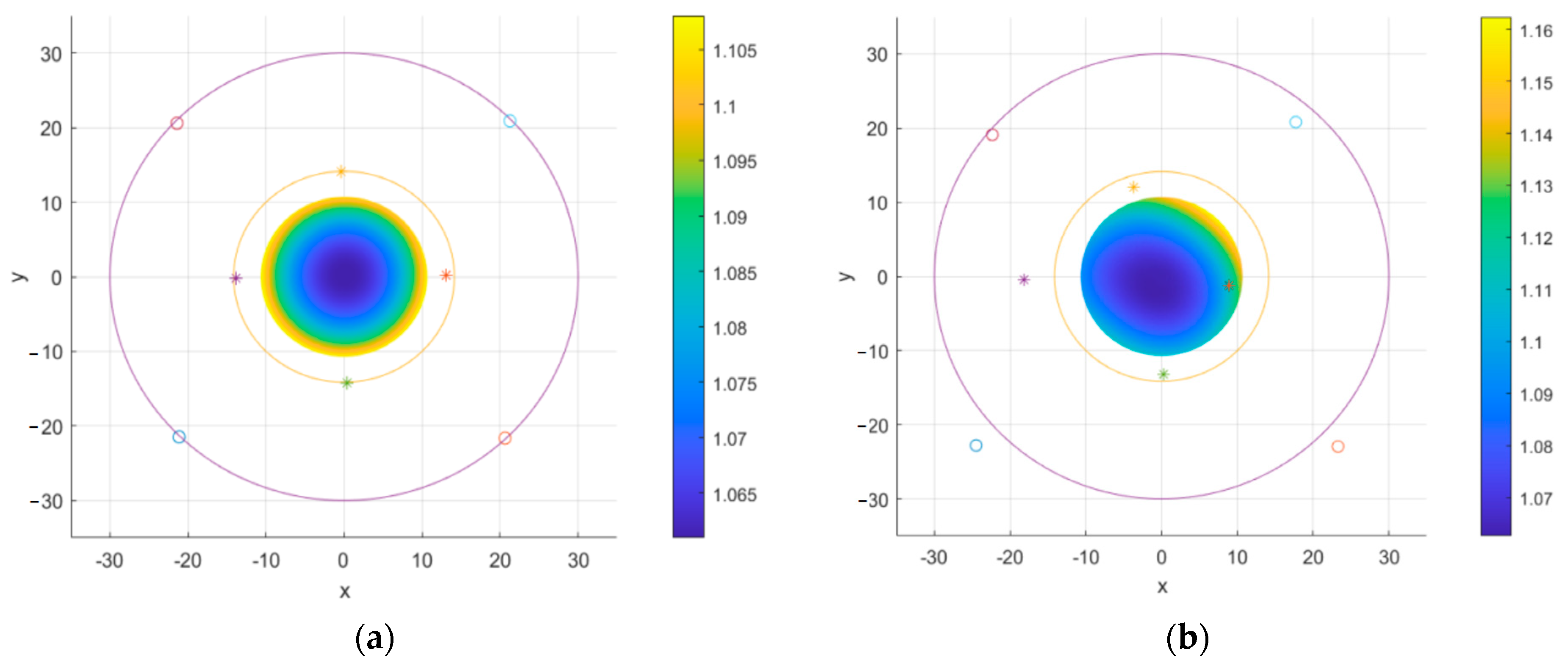
3.1.2. Design of Configuration for Minimum DOP on the Prior Target Region
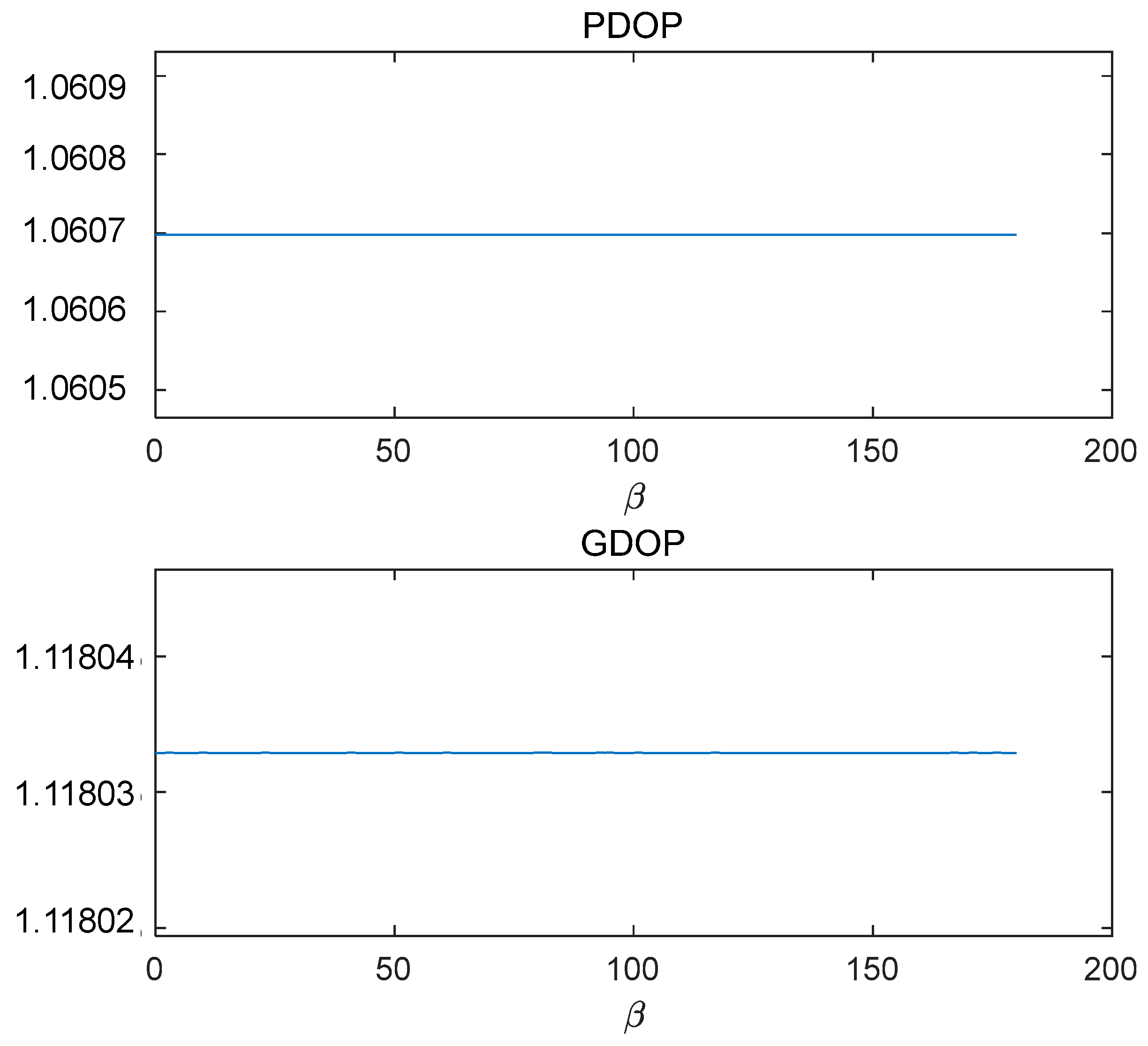
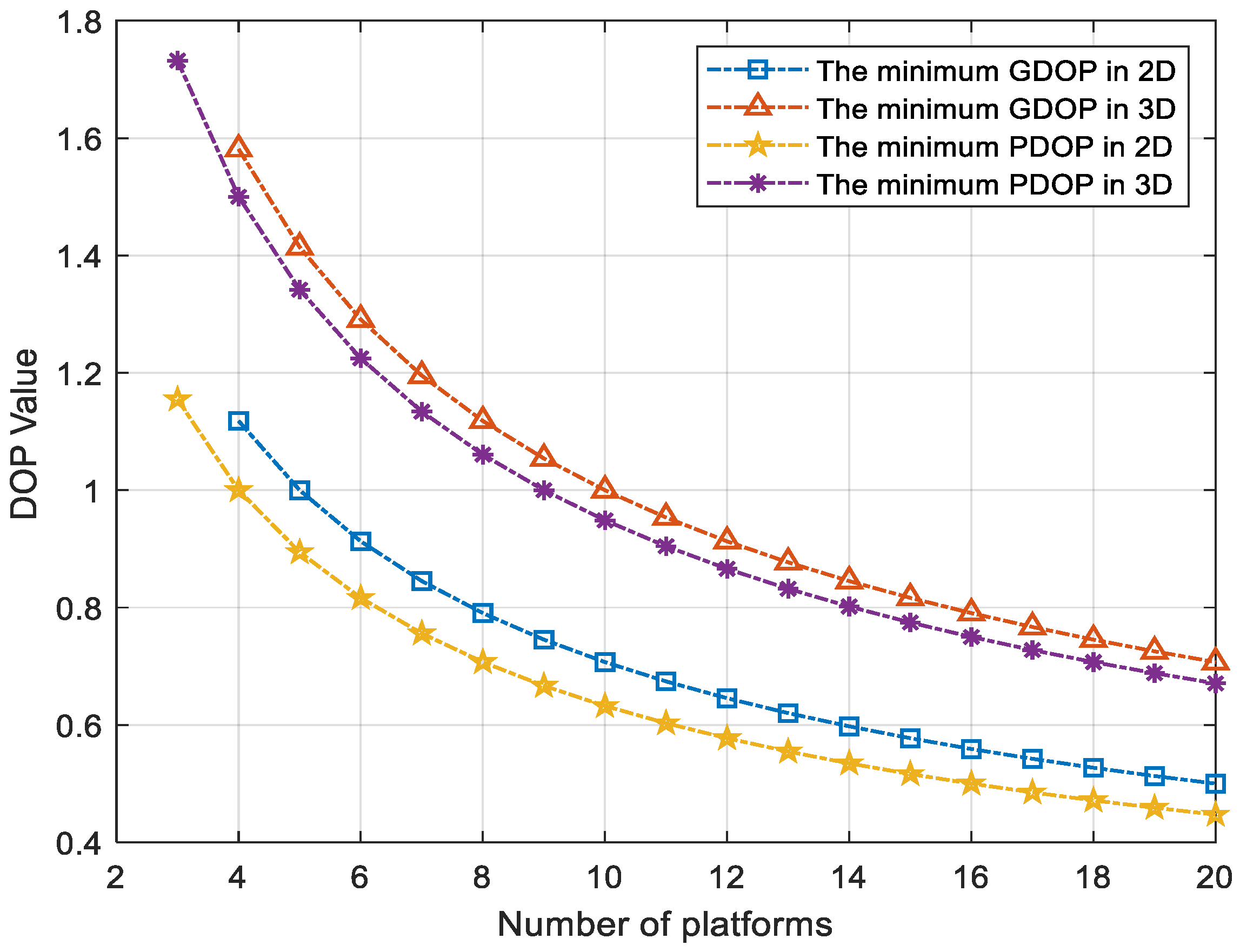
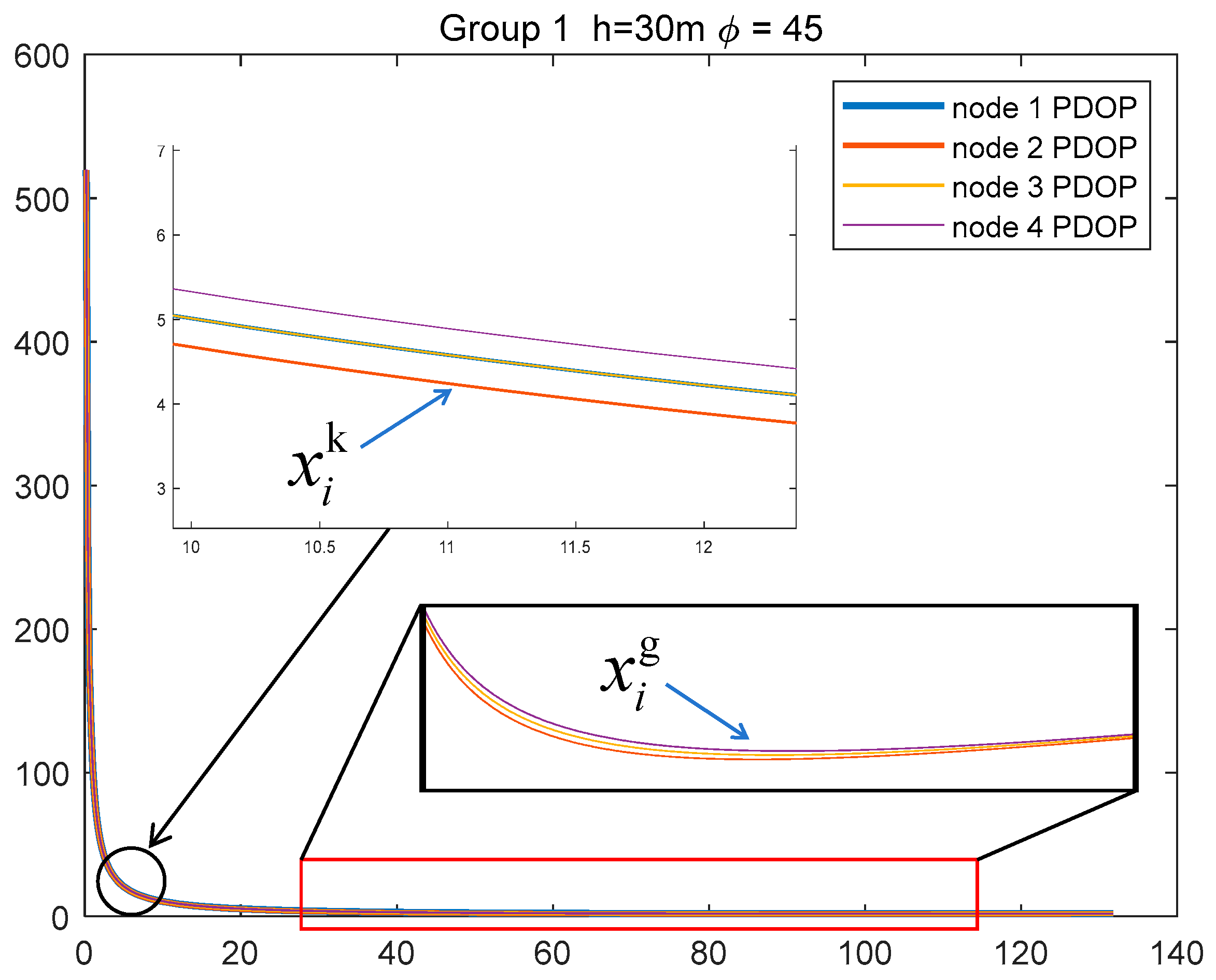
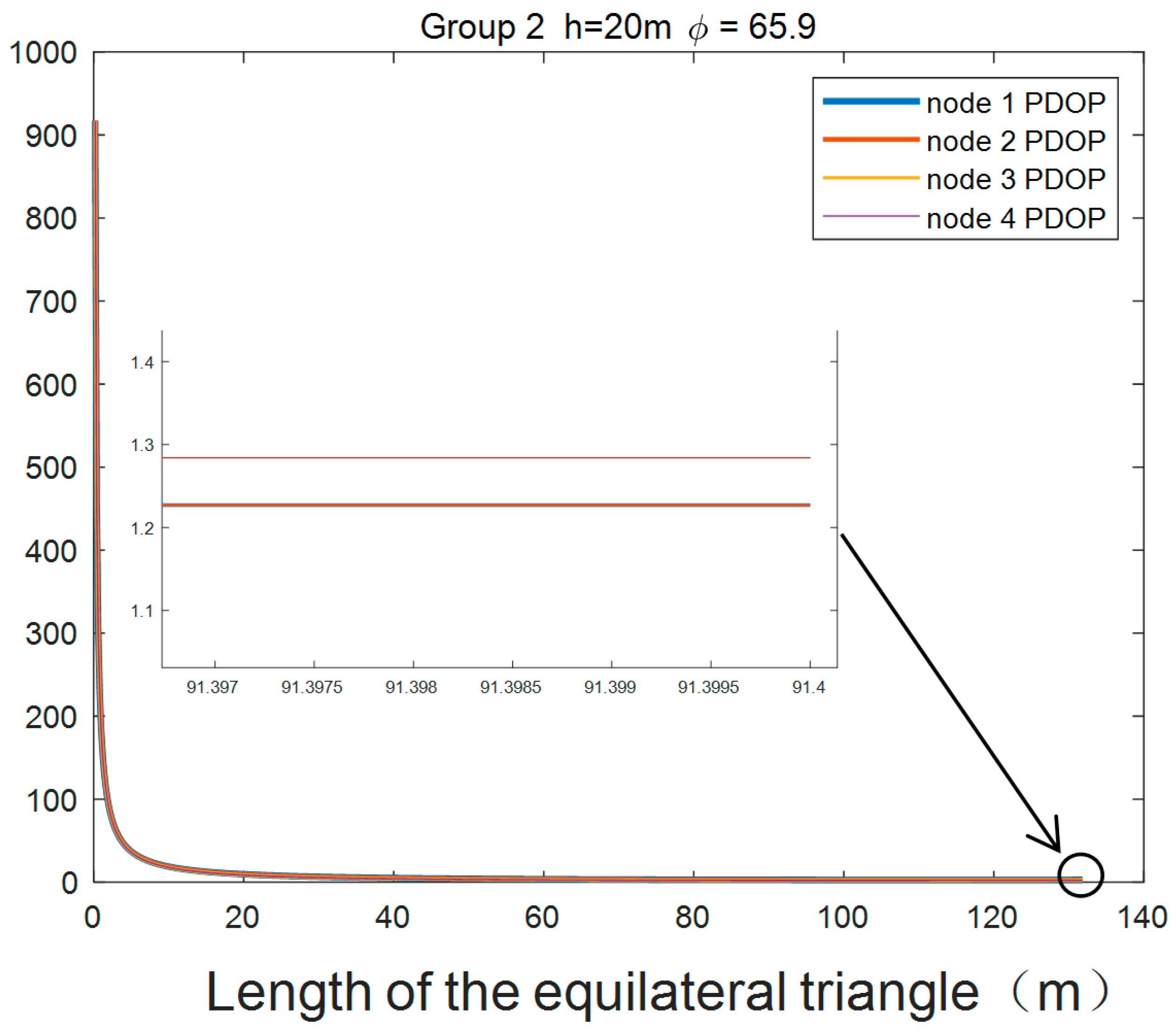
- The trend of changes in Min_DOP, Center_DOP and with respect to the cone angle is consistent.
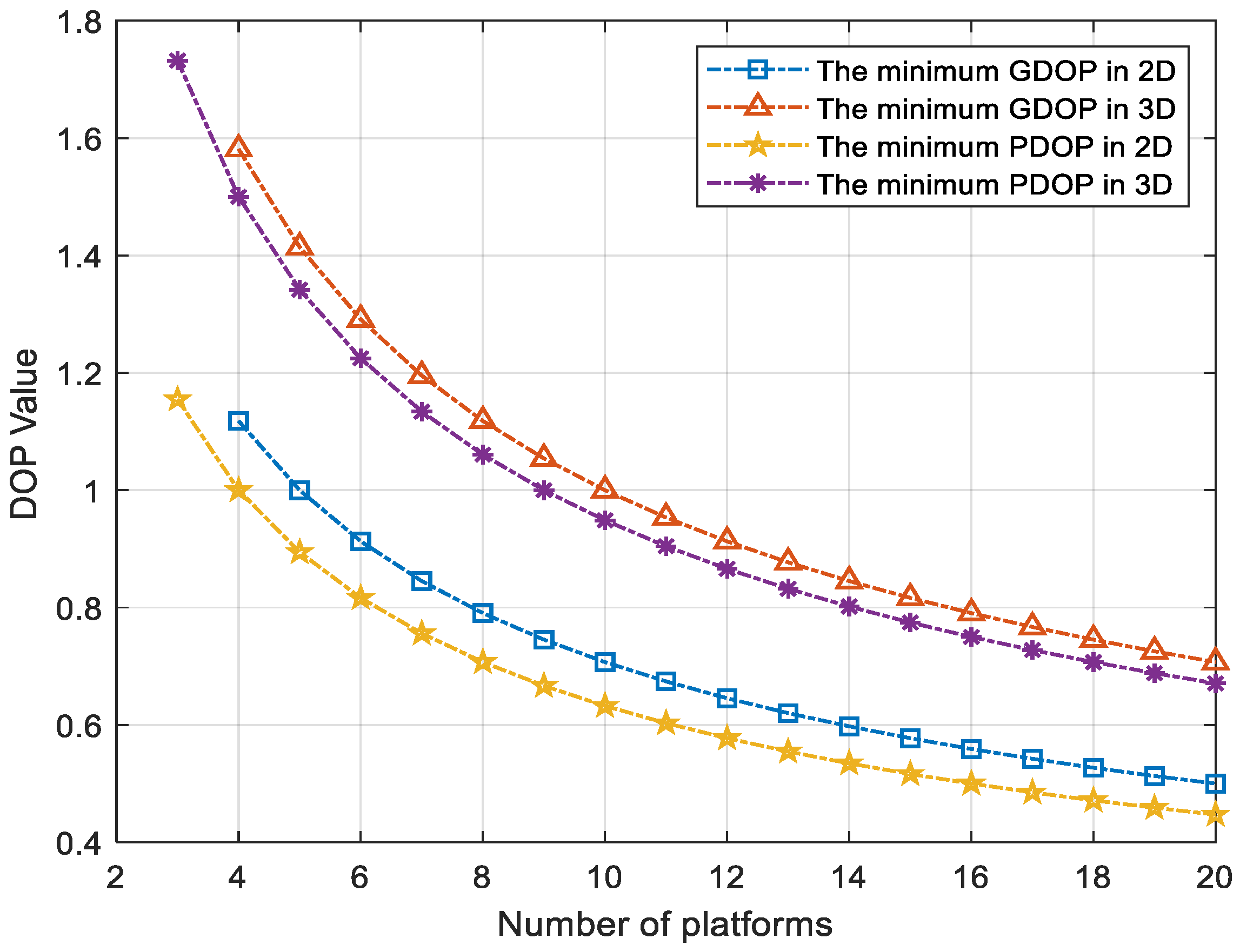
- When the coning angles vary from 0 to , the variation amplitude of PDOP is much smaller than that of GDOP.
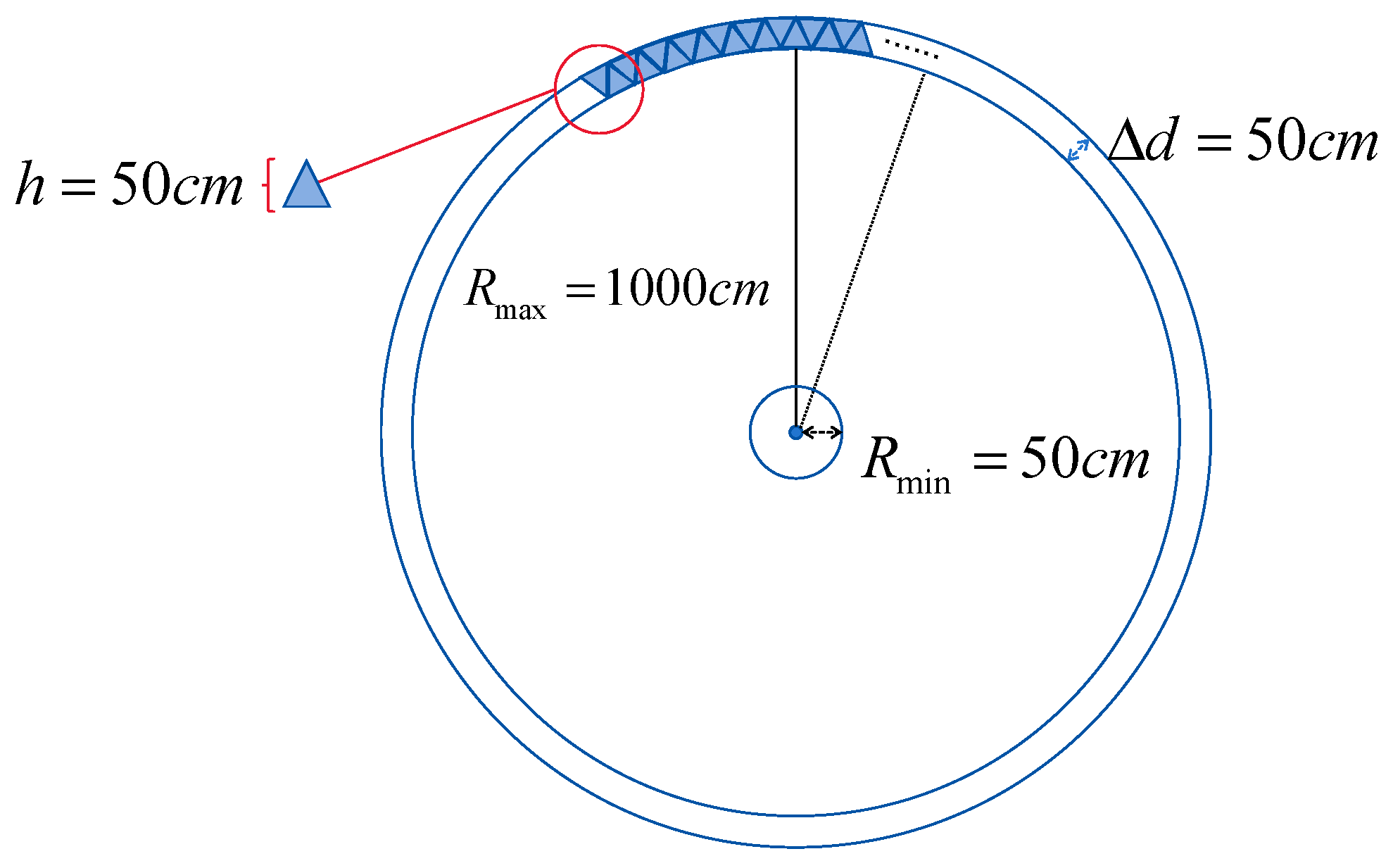
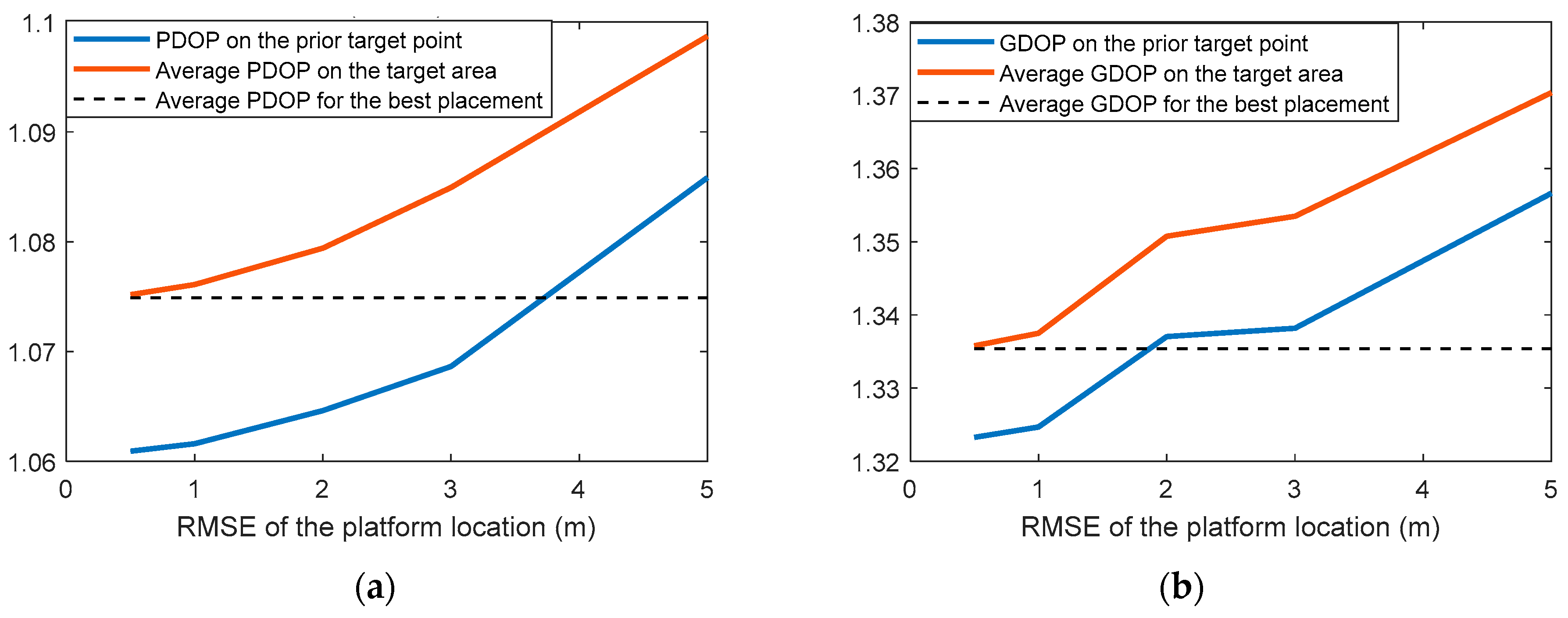
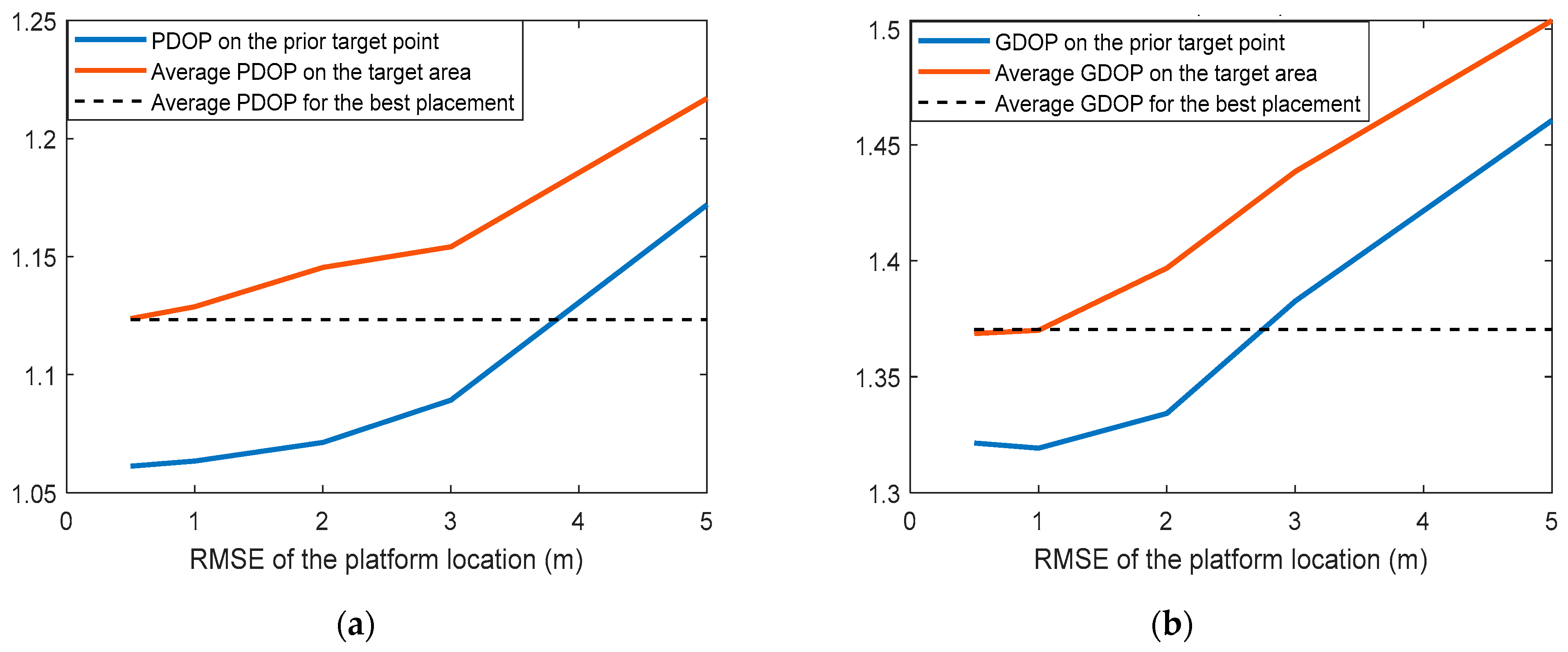
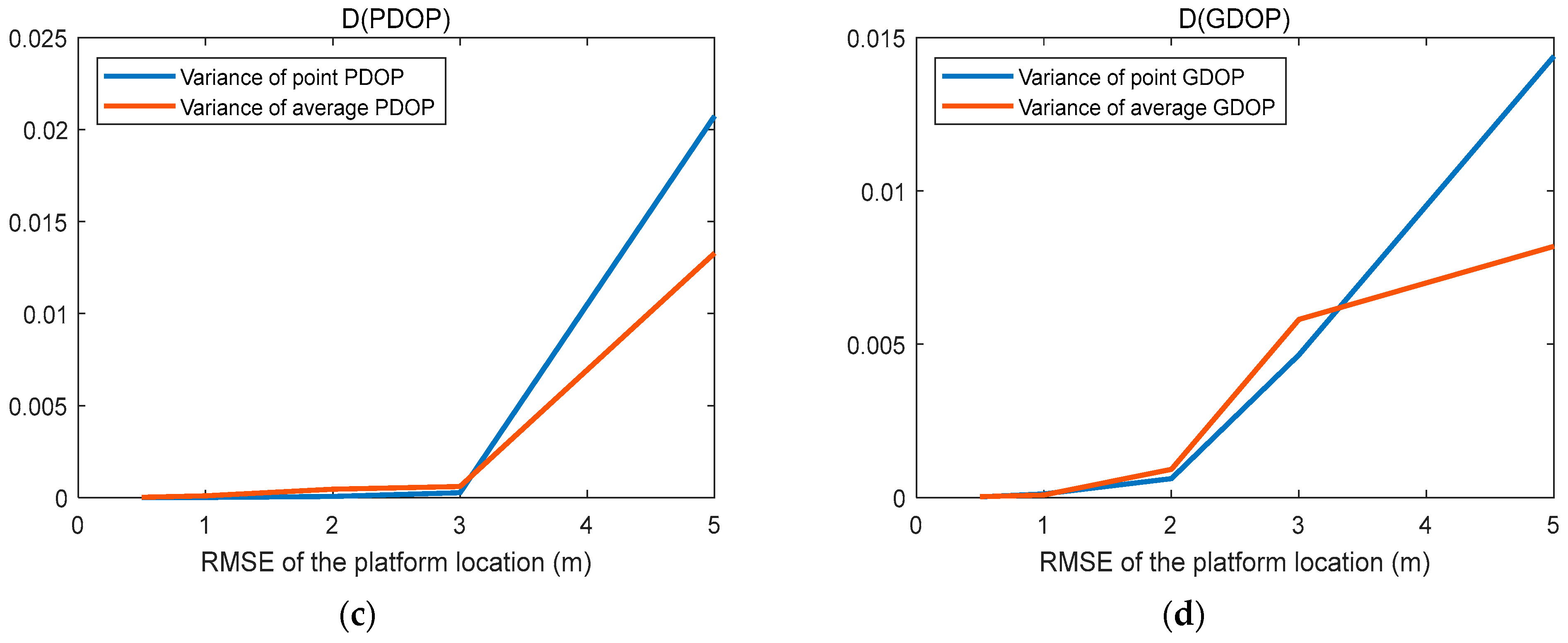
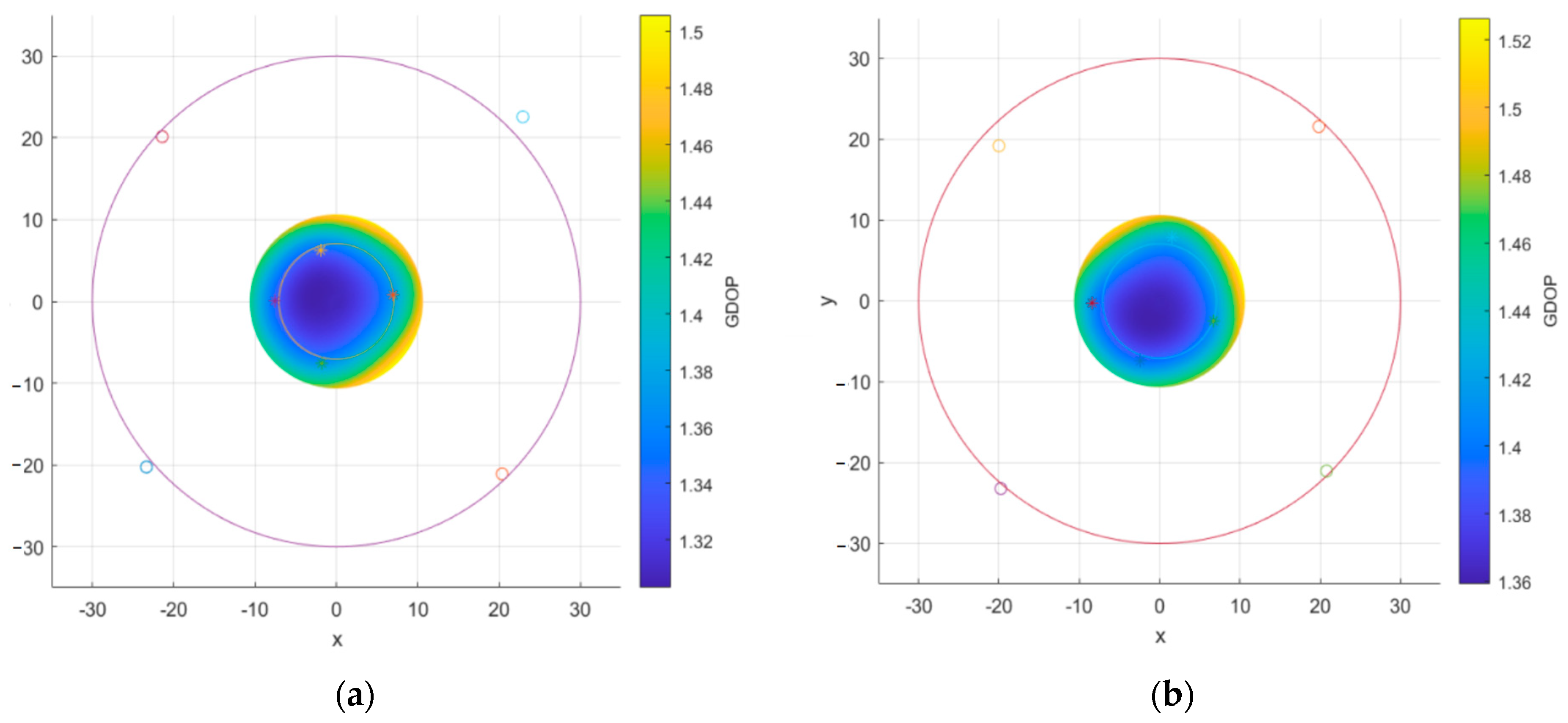
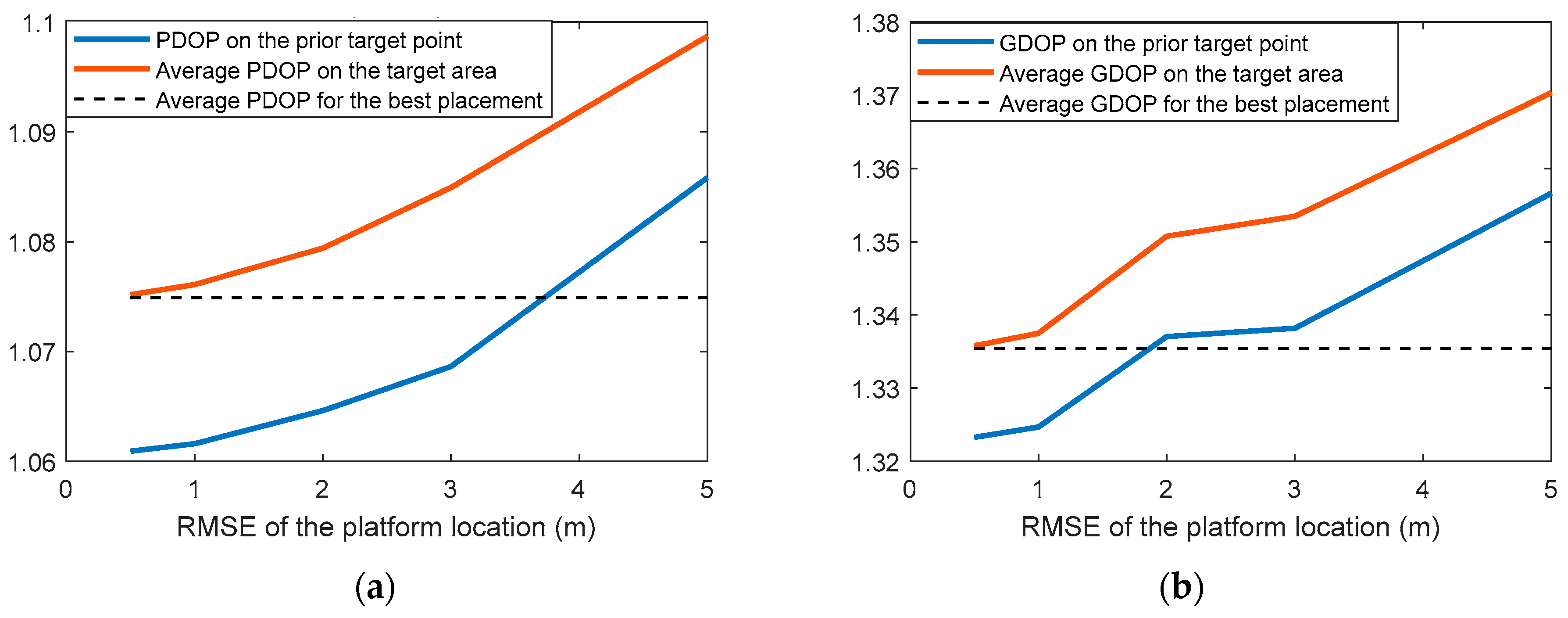
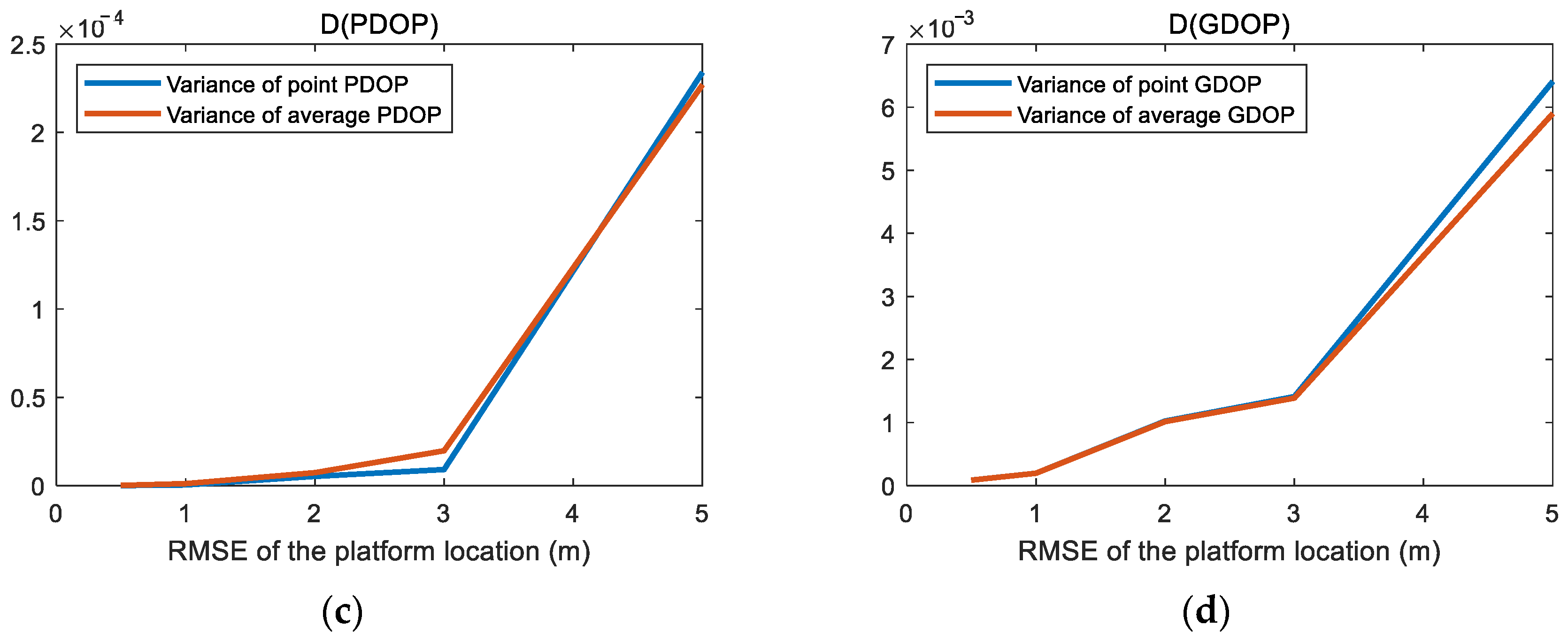
3.1.3. Design of Configuration for Minimum DOP with the Condition of Platforms’ Localization Error
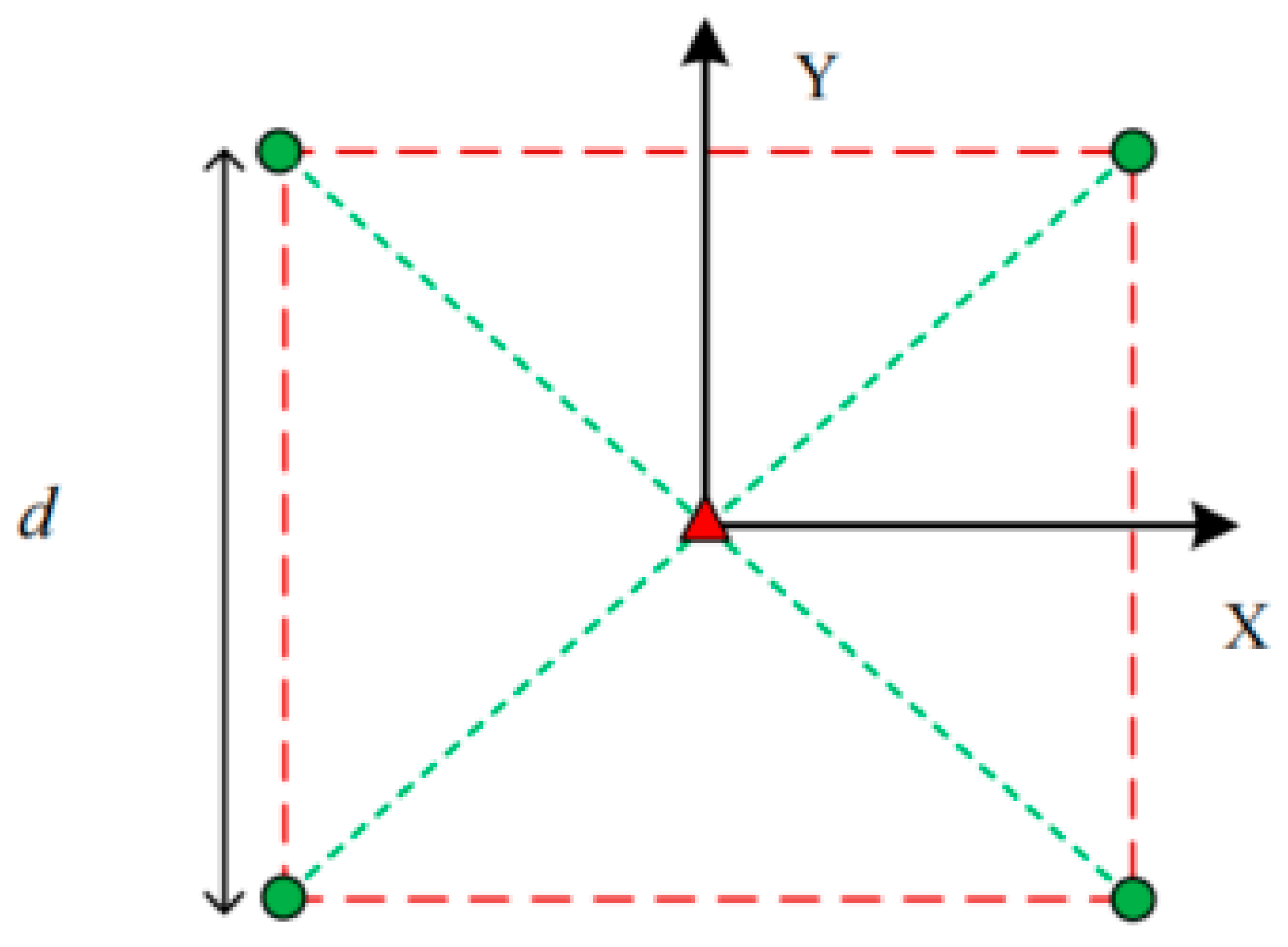
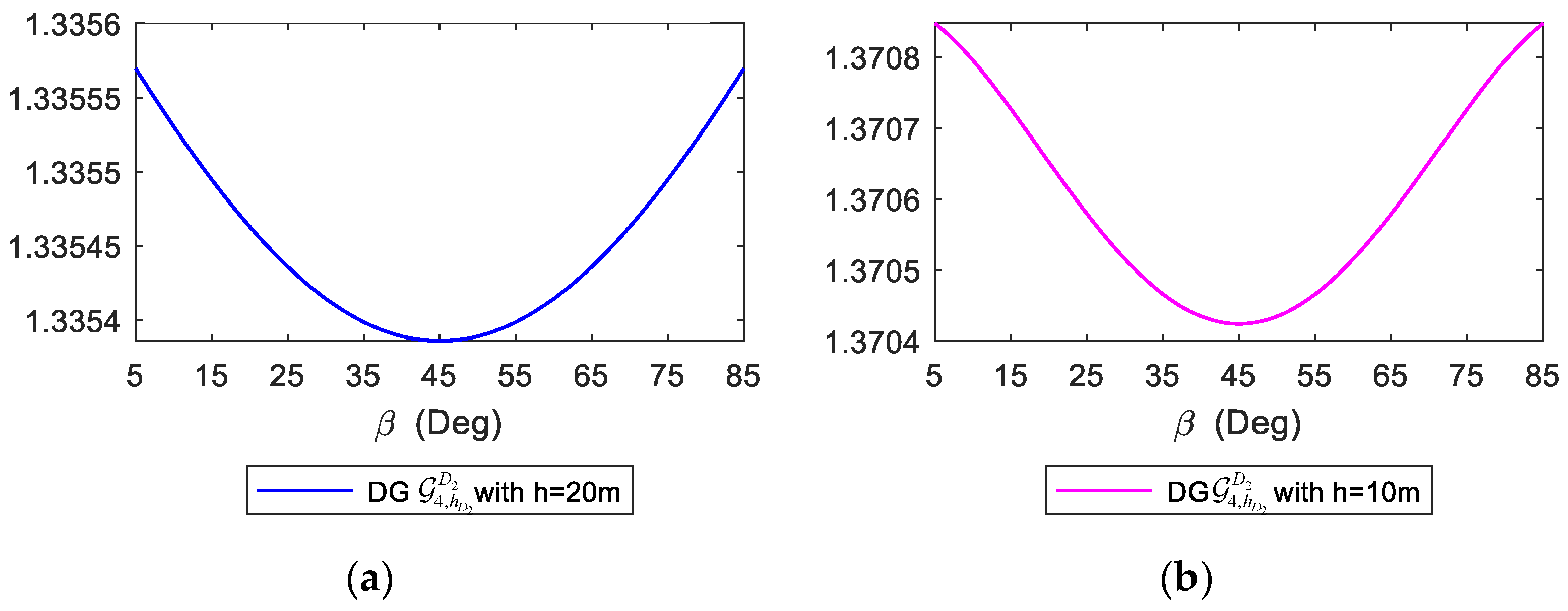
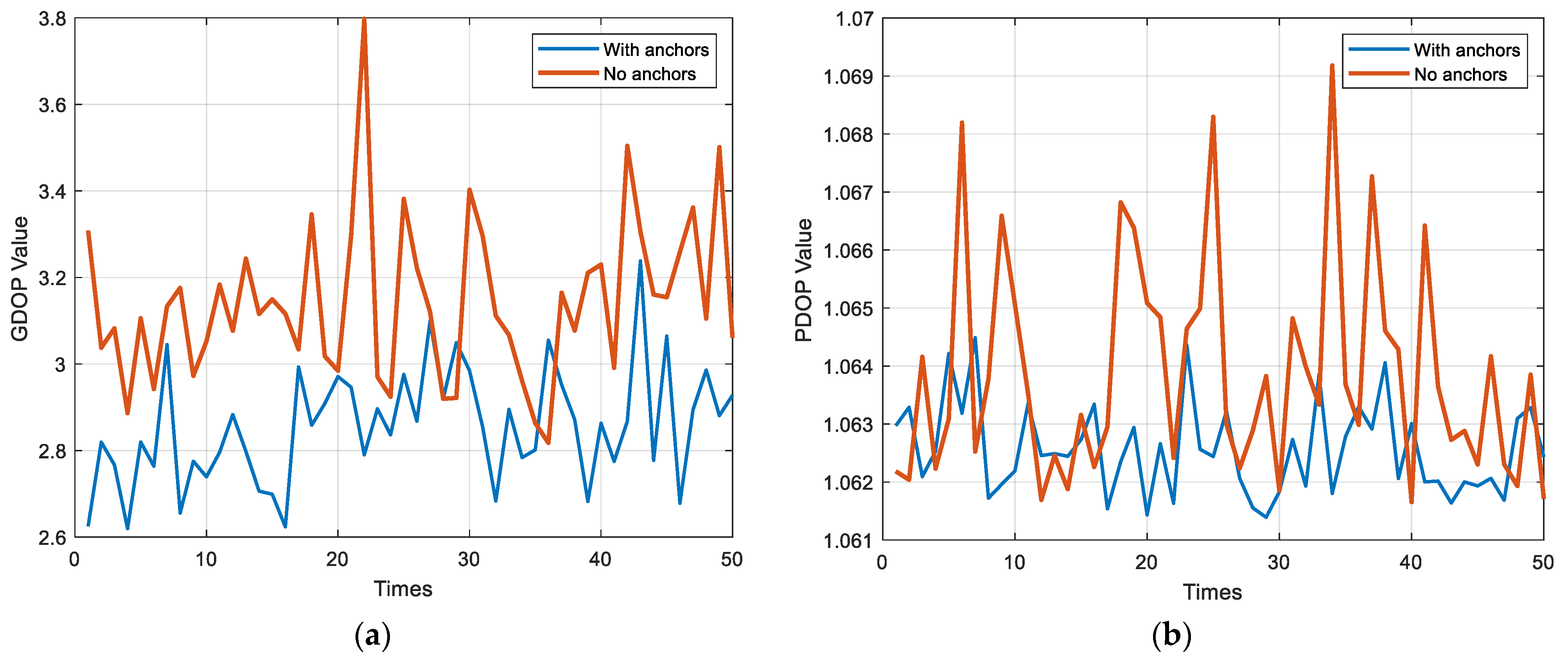
3.2. The Design of Configuration for AG
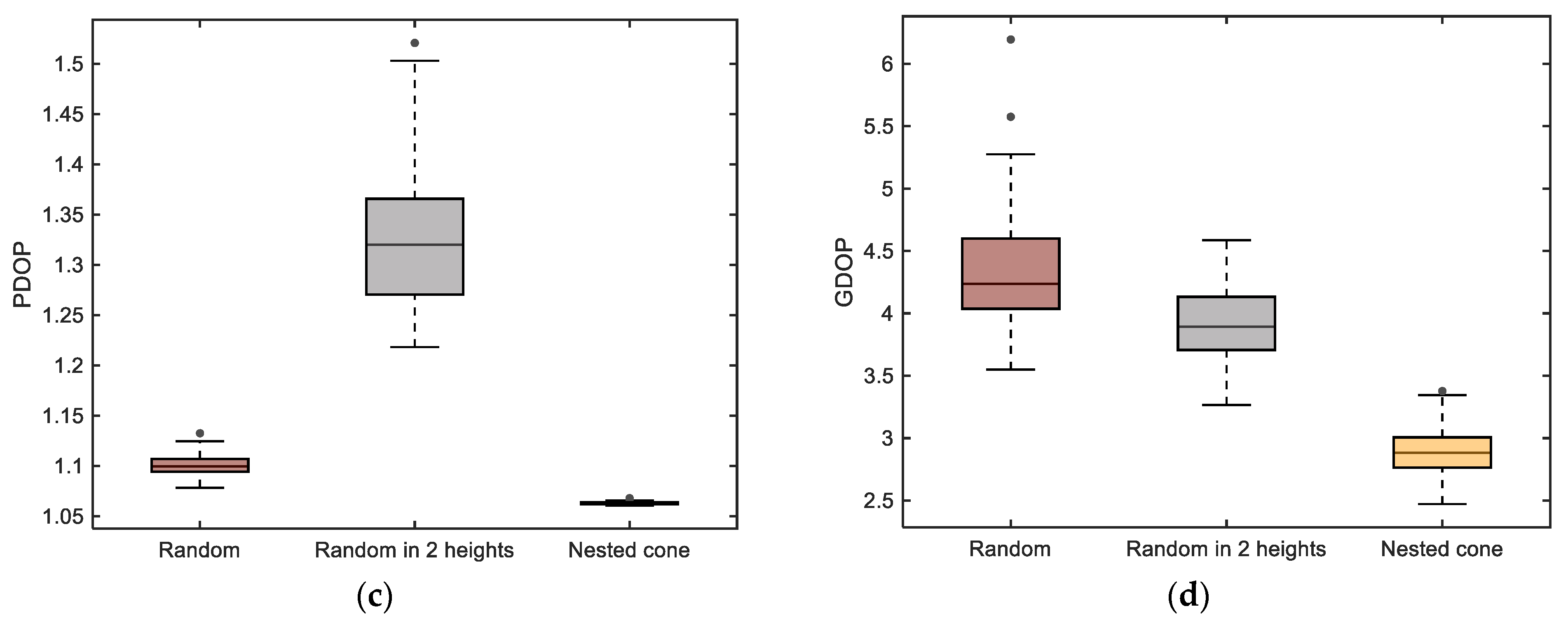
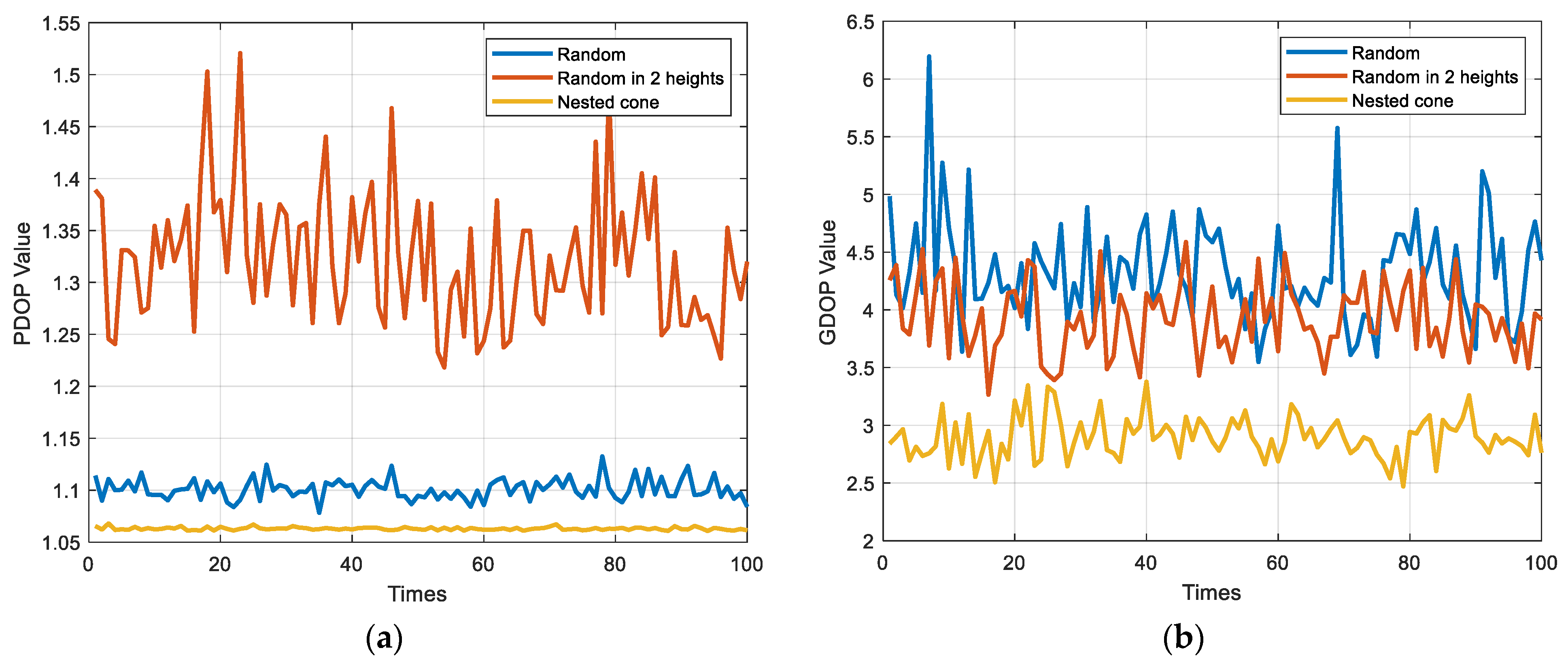
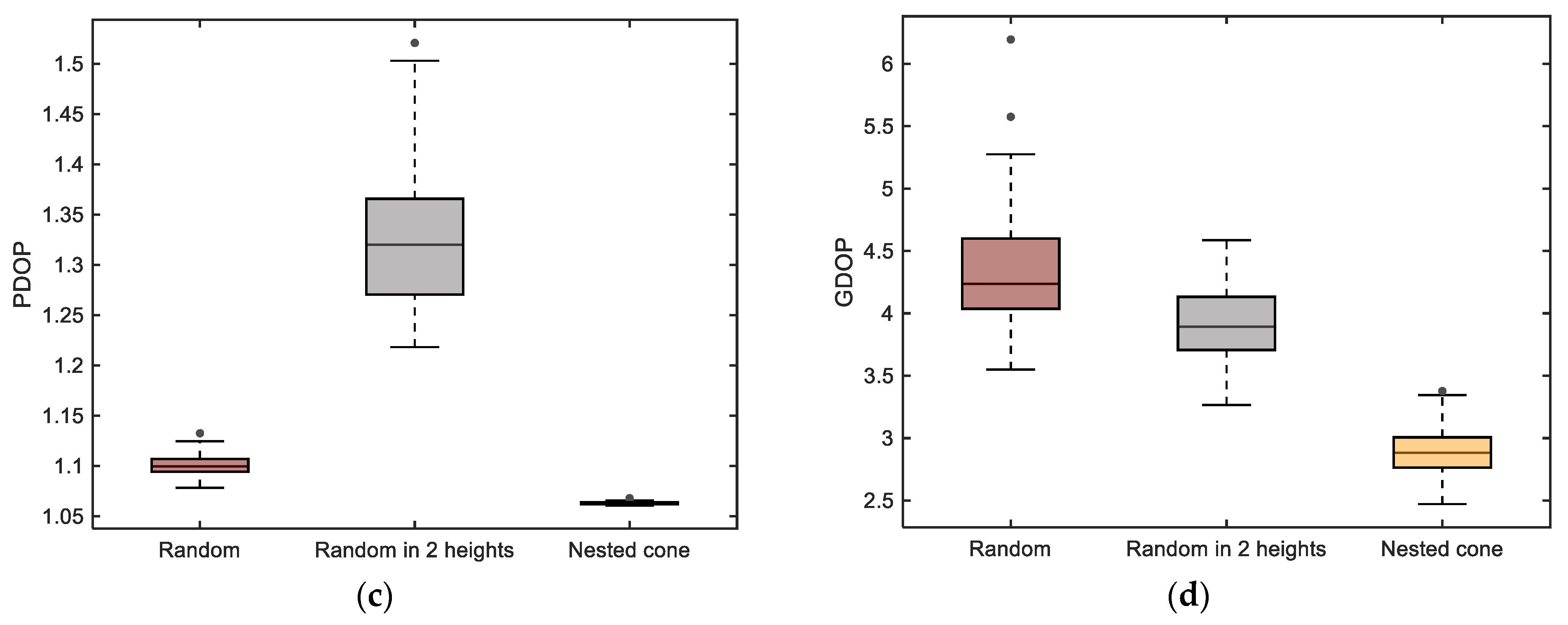
3.3. Comparison between Designed Optimal Configuration and Random Placement
4. Conclusions
- The process of grouping is more intuitive, suiting the working characteristics of heterogeneous swarms much better.
- The modeling of different groups distributed in different cones is independent of each other, making it easy to add constraints to specific groups based on specific tasks or establish conditional functions when facing more complex optimization problems.
- The calculation of DOP is simple and fast, which improves the speed of optimal design.
- The calculation of DOP requires the noise of airborne sensors to be independent white noise, but the noise characteristics of sensors such as LiDAR and airborne radar do not strictly satisfy this requirement.
- The design of the nested cone configuration relies on prior position information about the target.
- The design of this formation only focuses on the optimal DOP, which is the detection accuracy requirement, without considering detection coverage, efficiency, and other indicators.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, A.W.; Liang, X.L.; Hou, Y.Q. An Autonomous Cooperative Interception Method with Angle Constraints Using a Swarm of UAVs. IEEE Trans. Veh. Technol. 2023, 72, 15436–15449. [Google Scholar] [CrossRef]
- Cai, W.Y.; Liu, Z.Q.; Zhang, M.Y. Cooperative Artificial Intelligence for underwater robotic swarm. Robot. Auton. Syst. 2023, 164, 104410. [Google Scholar] [CrossRef]
- Farid, A.M.; Kuan, L.M. Effective UAV patrolling for swarm of intruders with heterogeneous behavior. Robotica 2023, 41, 1673–1688. [Google Scholar] [CrossRef]
- Chen, K.; Fan, C.L. Heterogeneous swarm control based on two-layer topology. Int. J. Robust Nonlinear Control 2023, 33, 1. [Google Scholar] [CrossRef]
- Zhen, Z.Y.; Wen, L.D. Improved contract network protocol algorithm based cooperative target allocation of heterogeneous UAV swarm. Aerosp. Sci. Technol. 2021, 119, 107054. [Google Scholar] [CrossRef]
- Jiang, T.H. Research on Formation Deployment and Effectiveness Evaluation Method for Multi-UUV Cooperative Operations. Master’s Thesis, Control Science and Engineering Harbin Engineering University, Harbin, China, 2020. [Google Scholar]
- Chen, G.J. Research on the Construction and Optimization of Multi-UUV Formations for Collaborative Detection. Master’s Thesis, Control Science and Engineering Harbin Engineering University, Harbin, China, 2021. [Google Scholar]
- Xu, S.; Wu, L.L. A Hybrid Approach to Optimal TOA-Sensor Placement With Fixed Shared Sensors for Simultaneous Multi-Target Localization. IEEE Trans. Signal Process. 2022, 70, 1197–1212. [Google Scholar] [CrossRef]
- Xu, S.; Rice, M. Optimal TOA-sensor placement for two target localization simultaneously using shared sensors. IEEE Commun. Lett. 2021, 25, 2584–2588. [Google Scholar] [CrossRef]
- Xu, S. Optimal Sensor Placement for Target Localization Using Hybrid RSS, AOA and TOA Measurements. IEEE Commun. Lett. 2020, 24, 1966–1970. [Google Scholar] [CrossRef]
- Chen, S.J.; Ho, K.C. Achieving Asymptotic Efficient Performance for Squared Range and Squared Range Difference Localizations. IEEE Trans. Signal Process. 2013, 61, 2836–2849. [Google Scholar] [CrossRef]
- Beck, A.; Stoica, P.; Li, J. Exact and approximate solutions of source localization problems. IEEE Trans. Signal Process. 2008, 56, 1770–1778. [Google Scholar] [CrossRef]
- Zhou, R.H.; Sun, H.M.; Li, H. TDOA and track optimization of UAV swarm based on D-optimality. J. Syst. Eng. Electron. 2020, 31, 1140–1151. [Google Scholar] [CrossRef]
- Zhou, R.H.; Sun, H.M.; Li, H. Hybrid TDOA/FDOA and track optimization of UAV swarm based on A-optimality. J. Syst. Eng. Electron. 2023, 34, 149–159. [Google Scholar] [CrossRef]
- Zhang, F.B.; Wu, X.Q.; Ma, P. Consistent Extended Kalman Filter-Based Cooperative Localization of Multiple Autonomous Underwater Vehicles. Sensors 2022, 22, 4563. [Google Scholar] [CrossRef] [PubMed]
- Fang, X.P.; Li, J.B. Optimal AOA Sensor-Source Geometry with Deployment Region Constraints. IEEE Commun. Lett. 2022, 26, 793–797. [Google Scholar] [CrossRef]
- Xu, B.; Fei, Y.L.; Wang, X.Y. Optimal topology design of multi-target AUVs for 3D cooperative localization formation based on angle of arrival measurement. Ocean Eng. 2023, 271, 113758. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, T.; Yi, W. A GDOP-Based Performance Description of TOA Localization with Uncertain Measurements. Remote Sens. 2022, 14, 910. [Google Scholar] [CrossRef]
- Ganesh, L.; Rao, G.S. TDOA Measurement Based GDOP Analysis for Radio Source Localization. Procedia Comput. Sci. 2016, 85, 740–747. [Google Scholar] [CrossRef]
- Sharp, I.; Yu, K.; Guo, Y.J. GDOP Analysis for Positioning System Design. IEEE Trans. Veh. Technol. 2009, 58, 3371–3382. [Google Scholar] [CrossRef]
- Xue, S.Q.; Yang, Y.X. Understanding GDOP minimization in GNSS positioning: Infinite solutions, finite solutions and no solution. Adv. Space Res. 2017, 59, 775–785. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Z.L. PDOP Analysis of Walker Constellation. Astron. Res. Technol. 2009, 2, 107–118. [Google Scholar]
- Xue, S.Q.; Yang, Y.X. A Nested Cone Structure for Minimum GDOP Positioning Configuration. Geomat. Inf. Sci. Wuhan Univ. 2014, 11, 1369–1374. [Google Scholar]
- Xue, S.Q.; Yang, Y.X. The minimum GDOP positioning configuration solution set derived from orthogonal trigonometric functions. Geomat. Inf. Sci. Wuhan Univ. 2014, 7, 820–825. [Google Scholar]
- Wang, C.Y. Study on UWB Positioning Method and Configuration Optimization. Doctor’s Thesis, China University of Mining and Technology, Xuzhou, China, 2020. [Google Scholar]
- Ding, L.Q.; Liu, Y.F.; Wu, N. Research on Unmanned Aircraft Collaborative Detection Configuration. Command Control Simul. 2022, 44, 12–18. [Google Scholar]
- Miao, S.; Hou, J.Y. Dynamic base stations selection method for passive location based on GDOP. PLoS ONE 2022, 17, e0272487. [Google Scholar] [CrossRef] [PubMed]
- Wan, J.; Dang, Y.M. Research of Buoy Array with Minimum GDOP for Underwater Positioning. Bull. Surv. Mapp. 2016, 5, 22–25, 31. [Google Scholar]
- Liu, Y.L.; Yu, R.H. Attitude Determination for Unmanned Cooperative Navigation Swarm Based on Multivectors in Covisibility Graph. Drones 2023, 7, 40. [Google Scholar] [CrossRef]
- Zhu, X.D.; Lai, J.Z. Robust adaptive cooperative localization method for multiple UAVs based on configuration optimization. J. Chin. Inert. Technol. 2023, 31, 650–658. [Google Scholar]
- Wang, C.Y.; Ning, Y.P. Optimized deployment of anchors based on GDOP minimization for ultra-wideband positioning. J. Spat. Sci. 2022, 67, 455–472. [Google Scholar] [CrossRef]
- Zhao, J.; Sun, J.M. Distributed coordinated control scheme of UAV swarm based on heterogeneous role. Chin. J. Aeronaut. 2022, 35, 81–97. [Google Scholar] [CrossRef]
- Xue, S.Q.; Yang, Y.X. Positioning configurations with the lowest GDOP and their classification. J. Geod. 2015, 89, 49–71. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Min_GDOP | 1.32 | 1.57 | 2.68 | 14.43 | 2.48 | 3.38 |
| Min_PDOP | 1.06 | 1.06 | 1.06 | 1.06 | 1.07 | 1.06 |
| Center_GDOP | 1.32 | 1.57 | 2.87 | 32.25 | 2.58 | 3.75 |
| Center_PDOP | 1.06 | 1.06 | 1.06 | 1.06 | 1.07 | 1.06 |
| 1.34 | 1.57 | 2.80 | 24.06 | 2.55 | 3.63 | |
| 1.06 | 1.07 | 1.07 | 1.08 | 1.07 | 1.07 |
| Node 1 | ||
| Node 2 | ||
| Node 3 | ||
| Node 4 |
| Detection Nodes | Random Formation | Random Formation in 2 Heights | Nested Method | ||||||
|---|---|---|---|---|---|---|---|---|---|
| x/m | y/m | z/m | x/m | y/m | z/m | x/m | y/m | z/m | |
| UAV1 | 5 | −31 | 30 | −10 | −28 | 0 | 31.63 | 31.63 | 20 |
| UAV2 | 42 | 35 | 30 | 22 | 15 | 0 | −31.63 | 31.63 | 20 |
| UAV3 | −62 | 13 | 30 | −2 | −5 | 0 | −31.63 | −31.63 | 20 |
| UAV4 | −55 | 54 | 30 | −7 | 25 | 0 | 31.63 | −31.63 | 20 |
| UAV5 | 12 | −27 | 30 | 27 | 11 | 0 | 30.00 | 0 | 30 |
| UAV6 | 15 | −32 | 30 | −12 | −21 | 60 | 0 | 30.00 | 30 |
| UAV7 | 32 | 15 | 30 | 15 | 21 | 60 | −30.00 | 0 | 30 |
| UAV8 | −12 | 27 | 30 | −21 | −1 | 60 | 0 | −30.00 | 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, R.; Liu, Y.; Meng, Y.; Guo, Y.; Xiong, Z.; Jiang, P. Optimal Configuration of Heterogeneous Swarm for Cooperative Detection with Minimum DOP Based on Nested Cones. Drones 2024, 8, 11. https://doi.org/10.3390/drones8010011
Yu R, Liu Y, Meng Y, Guo Y, Xiong Z, Jiang P. Optimal Configuration of Heterogeneous Swarm for Cooperative Detection with Minimum DOP Based on Nested Cones. Drones. 2024; 8(1):11. https://doi.org/10.3390/drones8010011
Chicago/Turabian StyleYu, Ruihang, Yilin Liu, Yangtao Meng, Yan Guo, Zhiming Xiong, and Pengfei Jiang. 2024. "Optimal Configuration of Heterogeneous Swarm for Cooperative Detection with Minimum DOP Based on Nested Cones" Drones 8, no. 1: 11. https://doi.org/10.3390/drones8010011
APA StyleYu, R., Liu, Y., Meng, Y., Guo, Y., Xiong, Z., & Jiang, P. (2024). Optimal Configuration of Heterogeneous Swarm for Cooperative Detection with Minimum DOP Based on Nested Cones. Drones, 8(1), 11. https://doi.org/10.3390/drones8010011