


Artificial Intelligence-Based Autonomous UAV Networks: A Survey



Abstract
1. Introduction
1.1. AI-Based UAV Networks
1.1.1. Security and Privacy Issues
1.1.2. UAV Network Design Issues
1.1.3. Localization and Trajectory
1.1.4. General Applications
1.2. Summary of Existing Surveys
1.3. Main Contribution
- We critically review and survey more than 100 published research papers selected from scholarly journals and conference proceedings on UAVs.
- We classify the existing research on UAVs based on their autonomous features. To this end, we focus on the survey of network resource management, multiple access and routing protocols, and power control and energy efficiency of UAV networks. This is a significant piece of work contributing to the design and deployment of the next-generation autonomous UAV systems.
- We identify and discuss areas for open research problems, including UAV network coverage, MAC protocol design, AI algorithm design, and aspects of security, safety, and privacy management.
1.4. Paper Organization
2. Background and Preliminaries
2.1. Traditional versus Autonomous UAV Networks
2.2. Communication, Computation, and Control
2.3. Channel Modeling
2.4. Interference Management
3. Autonomous Features in UAV Networks
3.1. Resource Management and Network Planning
3.2. Multiple Access and Routing Protocols
3.3. Power Control and Energy Efficiency

| Scope | Autonomous Features | Computational Intelligence | Channel Modeling | Interference Management | Security and Safety | Reference |
|---|---|---|---|---|---|---|
| Channel access | Cyclic multiple channel access | √ | Free-space path loss with LOS | - | - | [61] |
| MAC protocol | Energy consumption, Packet-error-rate (PER) | √ | Free-space path loss with LOS | - | - | [62,63] |
| Performance evaluation of MAC | PER | √ | Rician fading | - | - | [64] |
| Trajectory optimization | Trajectory planning | √ | Free-space path loss with LOS, correlated Rician fading, Rayleigh fading, Rician K-factor | √ | - | [67] |
| mm wave UAV cellular network | Beam forming | √ | Quasi-static, Rayleigh fading | √ | - | [68] |
| Channel access with time-modulated array (TDM) | Beam forming, performace | √ | Free-space path loss with LOS | √ | - | [70] |
| Trajectory optimization | Trajectory planning, power control | √ | Additive white Gaussian noise (AWGN) | √ | - | [74] |
| MAC protocol | Power optimization | √ | Rician fading | √ | - | [75] |
| MAC protocol | Throughput optimization | √ | Free-space path loss | - | - | [76] |
| MAC protocol | Power optimization | √ | Free-space path loss with LOS | √ | - | [77] |
| MAC protocol | Trajectory planning, resource management | √ | LOS and Non-LOS (NLOS) | √ | - | [78] |
| MAC protocol | Power optimization | √ | LOS, NLOS | √ | - | [79] |
| MAC protocol | Power and placement optimization | √ | Additive white Gaussian noise (AWGN) | √ | - | [80] |
| Rate-splitting | Beam forming | √ | Additive white Gaussian noise (AWGN) | √ | - | [82] |
| Rate-splitting | Spectral efficiency | √ | Additive white Gaussian noise (AWGN) | √ | - | [86] |
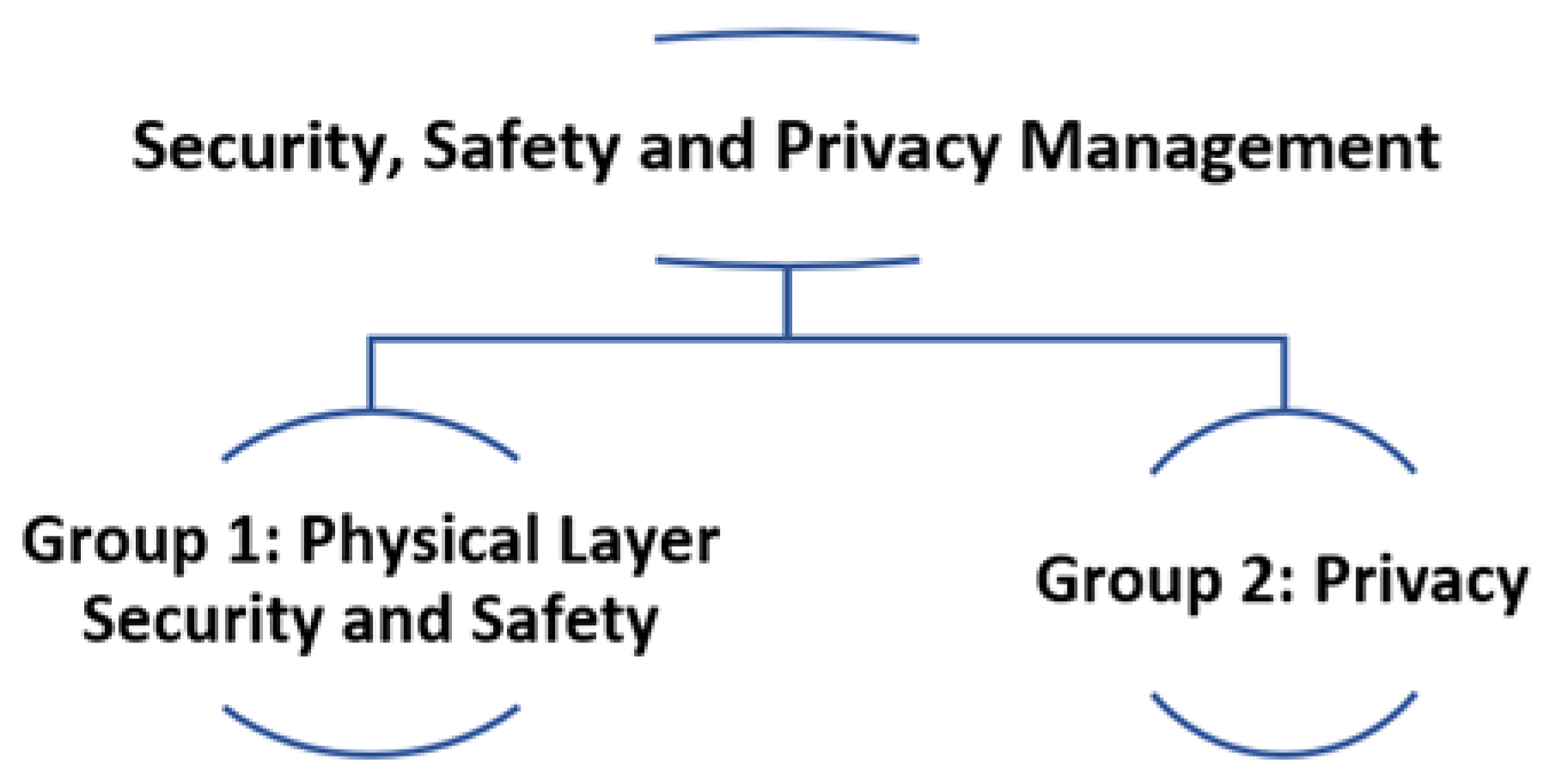
4. Security, Safety, and Privacy Management
4.1. Physical Layer Security and Safety
4.2. Privacy
5. Challenges and Open Research Areas
5.1. Network Coverage
5.2. MAC Protocol Design
5.3. AI Algorithm Design
5.4. Privacy and Security
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV communication networks issues: A review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.W.; Jayakody, D.N.K.; Wang, H.-C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Letaief, K.B.; Chen, W.; Shi, Y.; Zhang, J.; Zhang, Y.-J.A. The roadmap to 6G: AI empowered wireless networks. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Artificial intelligence for wireless connectivity and security of cellular-connected UAVs. arXiv 2018, arXiv:1804.05348. [Google Scholar]
- Kusyk, J.; Uyar, M.U.; Ma, K.; Plishka, J.; Bertoli, G.; Boksiner, J. AI and game theory based autonomous uav swarm for cybersecurity. In Proceedings of the MILCOM 2019 IEEE Military Communications Conference (MILCOM), Norfolk, VA, USA, 12–14 November 2019; pp. 1–6. [Google Scholar]
- Lim, W.Y.B.; Garg, S.; Xiong, Z.; Zhang, Y.; Niyato, D.; Leung, C.; Miao, C. UAV-Assisted Communication Efficient Federated Learning in the Era of the Artificial Intelligence of Things. IEEE Netw. 2021, 35, 188–195. [Google Scholar] [CrossRef]
- Dai, F.; Chen, M.; Wei, X.; Wang, H. Swarm intelligence-inspired autonomous flocking control in UAV networks. IEEE Access 2019, 7, 61786–61796. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987. [Google Scholar]
- Li, Y.; Aghvami, A.H.; Dong, D. Intelligent Trajectory Planning in UAV-Mounted Wireless Networks: A Quantum-Inspired Reinforcement Learning Perspective. IEEE Wirel. Commun. Lett. 2021, 10, 1994–1998. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Localization and clustering based on swarm intelligence in UAV networks for emergency communications. IEEE Internet. Things J. 2019, 6, 8958–8976. [Google Scholar] [CrossRef]
- Fatemidokht, H.; Rafsanjani, M.K.; Gupta, B.B.; Hsu, C.H. Efficient and secure routing protocol based on artificial intelligence algorithms with UAV-assisted for vehicular Ad Hoc networks in intelligent transportation systems. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4757–4769. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Xu, M. The coverage problem in UAV network: A survey. In Proceedings of the IEEE Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Kharagpur, India, 3–5 October 2022; pp. 1–5. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, H.; Hou, S.; Zhao, Z.; Xu, H.; Wu, X.; Wu, Q.; Zhang, R. A survey on 5G millimeter wave communications for UAV-assisted wireless networks. IEEE Access 2019, 7, 117460–117504. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Routing protocols for unmanned aerial vehicle networks: A survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Ahanger, T.A.; Ibrahim, A. Softwarization of UAV networks: A survey of applications and future trends. IEEE Access 2020, 8, 98073–98125. [Google Scholar] [CrossRef]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and privacy issues of UAV: A survey. Mob. Netw. Appl. 2020, 25, 95–101. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A survey on machine-learning techniques for UAV-based communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed]
- Ben Aissa, S.; Ben Letaifa, A. UAV Communications with Machine Learning: Challenges, Applications and Open Issues. Arab. J. Sci. Eng. 2021, 47, 1559–1579. [Google Scholar] [CrossRef]
- Song, Q.; Zeng, Y.; Xu, J.; Jin, S. A survey of prototype and experiment for UAV communications. Sci. China Inf. Sci. 2021, 64, 1–21. [Google Scholar] [CrossRef]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on UAV communication channel modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Drone Market Outlook in 2021: Industry Growth Trends, Market Stats and Forecast. Available online: https://www.businessinsider.com/drone-industry-analysis-market-trends-growth-forecasts?r=AU&IR=T (accessed on 17 December 2021).
- Valavanis, K.P. Advances in Unmanned Aerial Vehicles: State of the Art and the Road to Autonomy; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Garg, P. Characterisation of Fixed-Wing Versus Multirotors UAVs/Drones. J. Geomat. 2022, 16, 152–159. [Google Scholar] [CrossRef]
- Panagiotou, P.; Kaparos, P.; Salpingidou, C.; Yakinthos, K. Aerodynamic design of a MALE UAV. Aerosp. Sci. Technol. 2016, 50, 127–138. [Google Scholar] [CrossRef]
- Breaking Down Barriers for Unmanned Flight. Available online: https://www.nasa.gov/centers/glenn/technology/uav.html (accessed on 20 December 2021).
- Media Invited to Demonstrations of NASA Drone Traffic Management Technologies. Available online: https://www.nasa.gov/press-release/media-invited-to-demonstrations-of-nasa-drone-traffic-management-technologies (accessed on 20 December 2021).
- Richards, A.; How, J. Decentralized model predictive control of cooperating UAVs. In Proceedings of the 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Nassau, Bahamas, 14–17 December 2004; pp. 4286–4291. [Google Scholar]
- Bellingham, J.; Tillerson, M.; Richards, A.; How, J.P. Multi-Task Allocation and Path Planning for Cooperating UAVs; Springer: Boston, MA, USA, 2003. [Google Scholar]
- Conde, R.; Alejo, D.; Cobano, J.A.; Viguria, A.; Ollero, A. Conflict detection and resolution method for cooperating unmanned aerial vehicles. J. Intell. Robot. Syst. 2012, 65, 495–505. [Google Scholar] [CrossRef]
- Andersson, K.; Kaminer, I.; Jones, K.; Dobrokhodov, V.; Lee, D.J. Cooperating uavs using thermal lift to extend endurance. In Proceedings of the AIAA Infotech@ Aerospace Conference and AIAA Unmanned… Unlimited Conference, Seattle, WA, USA, 6–9 April 2009; p. 2043. [Google Scholar]
- Bithas, P.S.; Nikolaidis, V.; Kanatas, A.G.; Karagiannidis, G.K. UAV-to-ground communications: Channel modeling and UAV selection. IEEE Trans. Commun. 2020, 68, 5135–5144. [Google Scholar] [CrossRef]
- Challita, U.; Saad, W.; Bettstetter, C. Interference management for cellular-connected UAVs: A deep reinforcement learning approach. IEEE Trans. Wirel. Commun. 2019, 18, 2125–2140. [Google Scholar] [CrossRef]
- Challita, U.; Saad, W.; Bettstetter, C. Cellular-connected UAVs over 5G: Deep reinforcement learning for interference management. arXiv 2018, arXiv:1801.05500. [Google Scholar]
- Fouda, A.; Ibrahim, A.S.; Güvenç, Í.; Ghosh, M. Interference management in UAV-assisted integrated access and backhaul cellular networks. IEEE Access 2019, 7, 104553–104566. [Google Scholar] [CrossRef]
- Wang, L.C.; Chao, Y.S.; Cheng, S.H.; Han, Z. An integrated affinity propagation and machine learning approach for interference management in drone base stations. IEEE Trans. Cogn. Commun. Netw. 2019, 6, 83–94. [Google Scholar] [CrossRef]
- Zhang, S.; Shi, S.; Gu, S.; Gu, X. Power control and trajectory planning based interference management for UAV-assisted wireless sensor networks. IEEE Access 2019, 8, 3453–3464. [Google Scholar] [CrossRef]
- Zhang, J.; Chuai, G.; Gao, W. Power control and clustering-based interference management for UAV-assisted networks. Sensors 2020, 20, 3864. [Google Scholar] [CrossRef]
- Chen, J.; Chen, P.; Wu, Q.; Xu, Y.; Qi, N.; Fang, T. A game-theoretic perspective on resource management for large-scale UAV communication networks. China Commun. 2021, 18, 70–87. [Google Scholar] [CrossRef]
- Sanchez-Lopez, J.L.; Wang, M.; Olivares-Mendez, M.A.; Molina, M.; Voos, H. A real-time 3d path planning solution for collision-free navigation of multirotor aerial robots in dynamic environments. J. Intell. Robot. Syst. 2019, 93, 33–53. [Google Scholar] [CrossRef]
- Primatesta, S.; Guglieri, G.; Rizzo, A. A risk-aware path planning strategy for UAVs in urban environments. J. Intell. Robot. Syst. 2019, 95, 629–643. [Google Scholar] [CrossRef]
- Fonseca, E.; Galkin, B.; Kelly, M.; DaSilva, L.A.; Dusparic, I. Mobility for cellular-connected UAVs: Challenges for the network provider. In Proceedings of the 2021 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Porto, Portugal, 8–11 June 2021; pp. 136–141. [Google Scholar]
- Yin, S.; Li, L.; Yu, F.R. Resource allocation and basestation placement in downlink cellular networks assisted by multiple wireless powered UAVs. IEEE Trans. Veh. Technol. 2019, 69, 2171–2184. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Delay-constrained throughput maximization in UAV-enabled OFDM systems. In Proceedings of the 2017 23rd Asia-Pacific Conference on Communications (APCC), Perth, Australia, 11–13 December 2017; pp. 1–6. [Google Scholar]
- Pandey, A.; Kushwaha, D.; Kumar, S. Energy efficient UAV placement for multiple users in IoT networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Lupascu, M.; Hustiu, S.; Burlacu, A.; Kloetzer, M. Path planning for autonomous drones using 3d rectangular cuboid decomposition. In Proceedings of the 2019 the 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 9–11 October 2019; pp. 119–124. [Google Scholar]
- Wu, Y.; Low, K.H.; Pang, B.; Tan, Q. Swarm-based 4D path planning for drone operations in urban environments. IEEE Trans. Veh. Technol. 2021, 70, 7464–7479. [Google Scholar] [CrossRef]
- Wu, Q.; Mei, W.; Zhang, R. Safeguarding wireless network with UAVs: A physical layer security perspective. IEEE Wirel. Commun. 2019, 26, 12–18. [Google Scholar] [CrossRef]
- Cai, Y.; Cui, F.; Shi, Q.; Zhao, M.; Li, G.Y. Dual-UAV-enabled secure communications: Joint trajectory design and user scheduling. IEEE J. Sel. Areas Commun. 2018, 36, 1972–1985. [Google Scholar] [CrossRef]
- Li, A.; Wu, Q.; Zhang, R. UAV-enabled cooperative jamming for improving secrecy of ground wiretap channel. IEEE Wirel. Commun. Lett. 2018, 8, 181–184. [Google Scholar] [CrossRef]
- Sun, X.; Shen, C.; Chang, T.-H.; Zhong, Z. Joint resource allocation and trajectory design for UAV-aided wireless physical layer security. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Zeng, F.; Hu, Z.; Xiao, Z.; Jiang, H.; Zhou, S.; Liu, W.; Liu, D. Resource allocation and trajectory optimization for QoE provisioning in energy-efficient UAV-enabled wireless networks. IEEE Trans. Veh. Technol. 2020, 69, 7634–7647. [Google Scholar] [CrossRef]
- Min, M.; Xiao, L.; Xu, D.; Huang, L.; Peng, M. Learning-based defense against malicious unmanned aerial vehicles. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Yue, X.; Liu, Y.; Wang, J.; Song, H.; Cao, H. Software defined radio and wireless acoustic networking for amateur drone surveillance. IEEE Commun. Mag. 2018, 56, 90–97. [Google Scholar] [CrossRef]
- Amphawan, A.; Chaudhary, S.; Neo, T.-K.; Kakavand, M.; Dabbagh, M. Radio-over-free space optical space division multiplexing system using 3-core photonic crystal fiber mode group multiplexers. Wirel. Netw. 2021, 27, 211–225. [Google Scholar] [CrossRef]
- Yang, Y.; Ma, Z.; Wang, Y. SDM Technology based on Spot-beam Antenna. In Proceedings of the 3rd International Conference on Mechatronics Engineering and Information Technology (ICMEIT 2019), Dalian, China, 29–30 March 2019; pp. 788–794. [Google Scholar]
- Konstantinou, D.; Rommel, S.; Morales, A.; Raddo, T.R.; Johannsen, U.; Tafur Monroy, I. An ehealth-care driven perspective on 5g networks and infrastructure. In Proceedings of the Interactive Mobile Communication, Technologies and Learning, Thessaloniki, Greece, 29 November–1 December 2017; pp. 1076–1088. [Google Scholar]
- Lyu, J.; Zeng, Y.; Zhang, R. Cyclical multiple access in UAV-aided communications: A throughput-delay tradeoff. IEEE Wirel. Commun. Lett. 2016, 5, 600–603. [Google Scholar] [CrossRef]
- Ho, T.D.; Park, J.; Shimamoto, S. Novel multiple access scheme for wireless sensor network employing unmanned aerial vehicle. In Proceedings of the 29th Digital Avionics Systems Conference, Salt Lake City, UT, USA, 3–7 October 2010; pp. 5. C. 5-1–5. C. 5-8. [Google Scholar]
- Ho, T.D.; Park, J.; Shimamoto, S. QoS constraint with prioritized frame selection CDMA MAC protocol for WSN employing UAV. In Proceedings of the 2010 IEEE Globecom Workshops, Miami, FL, USA, 6 December 2010; pp. 1826–1830. [Google Scholar]
- Ho, D.-T.; Park, J.; Shimamoto, S. Performance evaluation of the pfsc based mac protocol for wsn employing uav in rician fading. In Proceedings of the 2011 IEEE Wireless Communications and Networking Conference, Cancun, Mexico, 28–31 March 2011; pp. 55–60. [Google Scholar]
- Xue, S.; Bi, S.; Lin, X. Energy minimization in UAV-aided wireless sensor networks with OFDMA. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–7. [Google Scholar]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation rate maximization in UAV-enabled wireless-powered mobile-edge computing systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef]
- Jiang, F.; Swindlehurst, A.L. Optimization of UAV heading for the ground-to-air uplink. IEEE J. Sel. Areas Commun. 2012, 30, 993–1005. [Google Scholar] [CrossRef]
- Xiao, Z.; Xia, P.; Xia, X.-G. Enabling UAV cellular with millimeter-wave communication: Potentials and approaches. IEEE Commun. Mag. 2016, 54, 66–73. [Google Scholar] [CrossRef]
- Xie, J.; Zhang, J.; Zhang, T. An efficient transmission of 4D trajectory short messages on LDACS1. In Proceedings of the 2014 Integrated Communications, Navigation and Surveillance Conference (ICNS) Conference Proceedings, Herndon, VA, USA, 8–10 April 2014; pp. W3-1–W3-11. [Google Scholar]
- Chen, Q.; He, C.; Bai, L.; Zhang, X. A novel SDMA uplink method based on time-modulated array for UAV communications. In Proceedings of the 2018 IEEE International Conference on Communication Systems (ICCS), Chengdu, China, 19–21 December 2018; pp. 19–24. [Google Scholar]
- Ren, H.; Li, L.; Xu, W.; Chen, W.; Han, Z. Machine learning-based hybrid precoding with robust error for UAV mmWave massive MIMO. In Proceedings of the ICC 2019-2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Tan, W.; Li, S.; He, C.; Tan, W.; Gu, X.; Shi, Z. Achievable rate of UAV-based communication with uniform circular arrays in Ricean fading. Phys. Commun. 2019, 32, 185–191. [Google Scholar] [CrossRef]
- Liu, Y.; Qin, Z.; Cai, Y.; Gao, Y.; Li, G.Y.; Nallanathan, A. UAV communications based on non-orthogonal multiple access. IEEE Wirel. Commun. 2019, 26, 52–57. [Google Scholar] [CrossRef]
- Abbasi, O.; Yanikomeroglu, H.; Ebrahimi, A.; Yamchi, N.M. Trajectory design and power allocation for drone-assisted NR-V2X network with dynamic NOMA/OMA. IEEE Trans. Wirel. Commun. 2020, 19, 7153–7168. [Google Scholar] [CrossRef]
- Nasir, A.A.; Tuan, H.D.; Duong, T.Q.; Poor, H.V. UAV-enabled communication using NOMA. IEEE Trans. Commun. 2019, 67, 5126–5138. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Z.; Huang, Q. Cyclical NOMA based UAV-enabled wireless network. IEEE Access 2018, 7, 4248–4259. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Le, L.B. NOMA user pairing and UAV placement in UAV-based wireless networks. In Proceedings of the ICC 2019-2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Cui, F.; Cai, Y.; Qin, Z.; Zhao, M.; Li, G.Y. Multiple access for mobile-UAV enabled networks: Joint trajectory design and resource allocation. IEEE Trans. Commun. 2019, 67, 4980–4994. [Google Scholar] [CrossRef]
- Sohail, M.F.; Leow, C.Y.; Won, S. Non-orthogonal multiple access for unmanned aerial vehicle assisted communication. IEEE Access 2018, 6, 22716–22727. [Google Scholar] [CrossRef]
- Liu, X.; Wang, J.; Zhao, N.; Chen, Y.; Zhang, S.; Ding, Z.; Yu, F.R. Placement and power allocation for NOMA-UAV networks. IEEE Wirel. Commun. Lett. 2019, 8, 965–968. [Google Scholar] [CrossRef]
- Jaafar, W.; Naser, S.; Muhaidat, S.; Sofotasios, P.C.; Yanikomeroglu, H. Multiple access in aerial networks: From orthogonal and non-orthogonal to rate-splitting. IEEE Open J. Veh. Technol. 2020, 1, 372–392. [Google Scholar] [CrossRef]
- Joudeh, H.; Clerckx, B. Rate-splitting for max-min fair multigroup multicast beamforming in overloaded systems. IEEE Trans. Wirel. Commun. 2017, 16, 7276–7289. [Google Scholar] [CrossRef]
- Mao, Y.; Clerckx, B.; Li, V.O. Rate-splitting for multi-antenna non-orthogonal unicast and multicast transmission: Spectral and energy efficiency analysis. IEEE Trans. Commun. 2019, 67, 8754–8770. [Google Scholar] [CrossRef]
- Xu, C.; Clerckx, B.; Chen, S.; Mao, Y.; Zhang, J. Rate-splitting multiple access for multi-antenna joint communication and radar transmissions. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Yin, L.; Clerckx, B. Rate-splitting multiple access for multibeam satellite communications. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Bansal, A.; Agrawal, N.; Singh, K. Rate-Splitting Multiple Access for UAV-Based RIS-Enabled Interference-Limited Vehicular Communication System. IEEE Trans. Intell. Veh. 2022, 8, 936–948. [Google Scholar] [CrossRef]
- Zhai, Q. Modelling of Energy Storage System in the Australian Electricity Market; UNSW Sydney: Sydney, Australia, 2018. [Google Scholar]
- Zhang, X.; Liu, L.; Dai, Y. Fuzzy state machine energy management strategy for hybrid electric UAVs with PV/fuel cell/battery power system. Int. J. Aerosp. Eng. 2018, 2018, 1–16. [Google Scholar] [CrossRef]
- Dutczak, J. Compressed hydrogen storage in contemporary fuel cell propulsion systems of small drones. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; p. 042013. [Google Scholar]
- Cho, S.M.; Kim, C.; Kim, K.S.; Kim, D.K. Lightweight hydrogen storage cylinder for fuel cell propulsion systems to be applied in drones. Int. J. Press. Vessel. Pip. 2021, 194, 104428. [Google Scholar] [CrossRef]
- Geertjes, M.; Spijkstra, J. Solar Powered Drones: Power Electronics. 2020. Available online: https://repository.tudelft.nl/islandora/object/uuid%3A664f1b4e-da14-4a16-8e02-c0230e68872d (accessed on 14 May 2023).
- El-Atab, N.; Mishra, R.B.; Alshanbari, R.; Hussain, M.M. Solar Powered Small Unmanned Aerial Vehicles: A Review. Energy Technol. 2021, 9, 2100587. [Google Scholar] [CrossRef]
- Suewatanakul, S.; Porcarelli, A.; Olsson, A.; Grimler, H.; Chiche, A.; Mariani, R.; Lindbergh, G. Conceptual Design of a Hybrid Hydrogen Fuel Cell/Battery Blended-Wing-Body Unmanned Aerial Vehicle—An Overview. Aerospace 2022, 9, 275. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zia, M.F.; Benbouzid, M.; Zhou, Z.; Donateo, T. Hybrid fuel cell powered drones energy management strategy improvement and hydrogen saving using real flight test data. Energy Convers. Manag. 2021, 236, 113987. [Google Scholar] [CrossRef]
- Shehzad, M.K.; Hassan, S.A.; Luque-Nieto, M.; Poncela, J.; Jung, H. Energy efficient placement of UAVs in wireless backhaul networks. In Proceedings of the 2nd ACM MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, London, UK, 25 September 2020; pp. 1–6. [Google Scholar]
- Kiani, F.; Seyyedabbasi, A.; Aliyev, R.; Gulle, M.U.; Basyildiz, H.; Shah, M.A. Adapted-RRT: Novel hybrid method to solve three-dimensional path planning problem using sampling and metaheuristic-based algorithms. Neural Comput. Appl. 2021, 33, 15569–15599. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Shivgan, R.; Dong, Z. Energy-efficient drone coverage path planning using genetic algorithm. In Proceedings of the 2020 IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020; pp. 1–6. [Google Scholar]
- Peng, K.; Du, J.; Lu, F.; Sun, Q.; Dong, Y.; Zhou, P.; Hu, M. A hybrid genetic algorithm on routing and scheduling for vehicle-assisted multi-drone parcel delivery. IEEE Access 2019, 7, 49191–49200. [Google Scholar] [CrossRef]
- Mukherjee, A.; Fakoorian, S.A.A.; Huang, J.; Swindlehurst, A.L. Principles of physical layer security in multiuser wireless networks: A survey. IEEE Commun. Surv. Tutor. 2014, 16, 1550–1573. [Google Scholar] [CrossRef]
- Huang, J.; Swindlehurst, A.L. Robust secure transmission in MISO channels based on worst-case optimization. IEEE Trans. Signal Process. 2011, 60, 1696–1707. [Google Scholar] [CrossRef]
- Zhou, Y.; Yeoh, P.L.; Chen, H.; Li, Y.; Schober, R.; Zhuo, L.; Vucetic, B. Improving physical layer security via a UAV friendly jammer for unknown eavesdropper location. IEEE Trans. Veh. Technol. 2018, 67, 11280–11284. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, R.; Zhang, J.; Gao, S.; Yang, L. Cooperative jamming for secure UAV communications with partial eavesdropper information. IEEE Access 2019, 7, 94593–94603. [Google Scholar] [CrossRef]
- Chang, V.; Chundury, P.; Chetty, M. Spiders in the sky: User perceptions of drones, privacy, and security. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 6765–6776. [Google Scholar]
- Wang, Y.; Xia, H.; Yao, Y.; Huang, Y. Flying Eyes and Hidden Controllers: A Qualitative Study of People’s Privacy Perceptions of Civilian Drones in The US. Proc. Priv. Enhancing Technol. 2016, 2016, 172–190. [Google Scholar] [CrossRef]
- Sella-Villa, D. Drones and Data: A Limited Impact on Privacy. U. Rich. L. Rev. 2020, 55, 991. [Google Scholar]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-based routing protocols and mobility models for flying ad hoc networks: A contemporary review and future research directions. Drones 2021, 6, 9. [Google Scholar] [CrossRef]
- Dogru, S.; Marques, L. Drone Detection Using Sparse Lidar Measurements. IEEE Robot. Autom. Lett. 2022, 7, 3062–3069. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



| Survey Scope | AI-Inspired? | UAV Features Addressed | Limitations | Reference |
|---|---|---|---|---|
| Cooperative UAVs, system deployment | Yes | Coverage, deployment, and nodes used | Obstacles in coverage are not considered | [12] |
| Various UAV networks, routing | Yes | Topology, mobility, reliability, and energy efficiency | System optimization has not been explored | [13] |
| UAV channel modeling, low altitude | Yes | Channel measurement and characteristics, fading | UAVs in dense urban areas are not explored | [14] |
| UAV-assisted and 5G mm wave communications | No | UAV as aerial access, relay, and backhaul | Antenna design, channel modeling, and performance assessment | [15] |
| Routing protocols for UAV networks | No | Topology, position, and cluster-based routings | UAV routing such as link disconnection has not been explored | [10] |
| Integration of UAV and cellular networks | Yes | UAV categorization, standardization, aerial channel modeling, and security | UAV antenna design has not been explored | [17] |
| UAV software-defined network (SDN) and network function virtualization (NFV) | Yes | SDN, NFV, cellular communication, routing, and monitoring | Wireless power transfer has not been addressed | [18] |
| Applications of multiple UAV systems | Yes | Coordination, cooperation, system autonomy | Multiple UAV systems have not been explored | [19] |
| Safety, privacy, and security issues of UAVs | No | Sensor-based attacks, GPS jamming, spoofing, and multi-UAV-based security | UAV privacy and security have not been addressed well | [20] |
| Machine learning for UAV communications | Yes | Channel modeling, positioning, resource management | UAVs for vehicular networks not addressed | [21] |
| UAV-centric machine learning | Yes | Cooperation trajectory planning, channel modeling, mobile-edge computing | Traffic dynamics and channel conditions not explored | [22] |
| UAV prototyping and experiments | No | Cellular UAVs, interference mitigation | Path planning optimization not explored | [23] |
| UAV Channel modeling, link budget | No | Two-ray fast fading, Rician fading, Rayleigh fading | UAV with satellite not explored | [24] |
| Scope | Autonomous Features | Computational Intelligence | Channel Modeling | Interference Management | Security and Safety | Reference |
|---|---|---|---|---|---|---|
| Cooperative path planning, collisions | Path planning | √ | Non-convex modeling | - | - | [31] |
| Cooperative path planning, resource allocation | Path planning | √ | - | - | - | [32] |
| Cooperative UAVs, trajectory conflicts | Conflict detection and resolution | √ | - | - | - | [33] |
| Channel modeling | √ | Shadowing channel | √ | - | [35] | |
| Interference management | Path planning | √ | Rician distribution | √ | - | [36] |
| Interference-aware path planning | Path planning | √ | Free-space path loss with 6 GHz | √ | - | [36] |
| Interference management | Spatial configuration | √ | Customized | √ | - | [38] |
| Interference management | Transmission power, trajectory planning | √ | Large-scale path loss | √ | - | [40] |
| Interference management | Transmission power | √ | Free-space path loss | √ | - | [41] |
| Resource management | Energy consumption, transmission power | √ | Various | √ | - | [42] |
| Collision free navigation | Trajectory planning | √ | - | - | - | [43] |
| Risk-aware path planning | Path planning | √ | - | - | - | [44] |
| Mobility challenges | - | - | - | √ | [45] | |
| Resource management | User association | √ | Free-space path loss | √ | - | [46] |
| Delay-aware throughput maximization | Trajectory planning | √ | Free-space path loss | - | - | [47] |
| UAV placement | Energy efficiency and optimization | √ | Path loss outdoor/indoor penetration | - | - | [48] |
| Collision free navigation | Trajectory planning | √ | - | √ | - | [49] |
| Swarm-based UAV | Path planning | √ | - | - | - | [50] |
| Physical layer security | security and cooperation | √ | Free-space path loss | √ | √ | [51] |
| Secure UAV communication | Cooperative scheduling | √ | Free-space path loss | - | √ | [52] |
| Physical layer security | Cooperative trajectory and optimization | √ | Free-space path loss | √ | √ | [53] |
| Physical layer security | Cooperative resource allocation | √ | Free-space path loss | - | √ | [54] |
| Quality of Experience (QoE) | Cooperative resource allocation | √ | LOS and Non-LOS | - | - | [55] |
| Secure UAV communication | UAV defense | √ | - | - | √ | [56] |
| Software-defined radio (SRD) | Localization of unwelcomed UAVs | √ | - | √ | √ | [57] |
| Scope | Autonomous Features | Computational Intelligence | Channel Modeling | Interference Management | Security and Safety | Reference |
|---|---|---|---|---|---|---|
| Resource management | Energy consumption, trajectory planning | √ | Free-space path loss with LOS | - | - | [65] |
| Computation optimization with energy management | Computation performance, energy consumption | √ | Block-fading, LOS | √ | - | [66] |
| Electric UAV, Fuzzy state machine | Energy management | √ | - | - | - | [87] |
| Compressed hydrogen, fuel cells | Energy management | √ | - | - | - | [89] |
| Hydrogen, fuel cells | Energy management | √ | - | - | - | [90,93] |
| Solar power | Energy management | √ | - | - | - | [91,92] |
| hybrid fuel | Energy management | √ | - | - | - | [94] |
| UAV backhaul network | Energy efficiency, placement optimization | √ | Free-space optical link (FSO), LOS | √ | - | [95] |
| Genetic algorithm | Energy efficiency | √ | - | - | - | [98] |
| Genetic algorithm | Cooperative path optimization | √ | - | - | - | [99] |
| Physical layer security | Jamming power | √ | Rayleigh fading channel | √ | √ | [102] |
| Secure UAV communication | Jamming power | √ | Free-space pathloss with LOS | - | √ | [103] |
| Co-channel interference management | Transmission power | √ | Free-space path loss with line of sight (LOS) | √ | - | [39] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarkar, N.I.; Gul, S. Artificial Intelligence-Based Autonomous UAV Networks: A Survey. Drones 2023, 7, 322. https://doi.org/10.3390/drones7050322
Sarkar NI, Gul S. Artificial Intelligence-Based Autonomous UAV Networks: A Survey. Drones. 2023; 7(5):322. https://doi.org/10.3390/drones7050322
Chicago/Turabian StyleSarkar, Nurul I., and Sonia Gul. 2023. "Artificial Intelligence-Based Autonomous UAV Networks: A Survey" Drones 7, no. 5: 322. https://doi.org/10.3390/drones7050322
APA StyleSarkar, N. I., & Gul, S. (2023). Artificial Intelligence-Based Autonomous UAV Networks: A Survey. Drones, 7(5), 322. https://doi.org/10.3390/drones7050322