
Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle




Abstract
1. Introduction
2. AAM Infrastructure and Ecosystem Methodology
- Autonomy: A key component of advanced air mobility vehicles, which are designed to operate with varying degrees of automation. Autonomy can refer to a range of capabilities, from basic automation such as automatic takeoff and landing, to fully autonomous flight without a human pilot on board. The complexity of UAM operations and the extent to which operations depend on automated systems, referred to as automation reliance, play a crucial role in the development of the UAM ecosystem. Progress in the UAM ecosystem, facilitated by urban mobility levels (UMLs) [21], is contingent upon satisfying the unique integration requirements related to aircraft, airspace, and the community for each UML.
- Vertiport Infrastructure: Vertiports are the equivalent of airports for eVTOLs. These facilities are designed to provide a seamless transition between ground and air transportation. They may include features such as charging stations, maintenance facilities, and passenger waiting areas. Vertiport [22] facilities will be critical to the success of the emerging air taxi industry, which is expected to provide on-demand aerial transportation services to passengers and cargo in urban and suburban areas [23]. To support the operation of vertiports, a robust communication infrastructure will be essential. This infrastructure will enable communication between the vertiports and the eVTOL aircraft, as well as between the eVTOL aircraft themselves [24]. It will also support the exchange of data and information between the vertiports and other stakeholders, such as air traffic controllers, local governments, and passengers. At present, two passenger transportation models exist, each serving specific needs and functions. The first model revolves around vertistops, designed for short hops within urban locations to facilitate easy mobility. These stops can be installed on existing infrastructure, such as building tops or unused spaces. The second model is suitable for intracity travel within a 150-mile range, aiming to restore regional air services discontinued by traditional airlines due to cost constraints. Longer-range eVTOLs may require vertiports, comprising stand-alone terminals, maintenance repair and overhaul (MRO) operations, and charging facilities. These could be established at existing airports, greenfield sites, or even on top of other existing infrastructure [25]. eVTOLs offer a faster mode of transportation, and could potentially replace cars, regional trains, or buses. Many developers and manufacturers are focusing on making eVTOLs affordable and accessible to a wider audience [24]. It is probable that vertiports will have to accommodate several eVTOL aircraft simultaneously, but they may require significantly less space than vertihubs. These ports could have fast charging/refueling systems, basic security checkpoints, and the capability to carry out minor MRO operations. However, they may not have parking spaces for long-haul eVTOLs or fully fledged MRO stations. Finally, the development of a robust communication infrastructure will be critical to the success of the emerging air taxi industry and the safe and efficient operation of eVTOL aircraft in urban and suburban areas.
- Charging Infrastructure: eVTOLs require reliable and accessible charging infrastructure. This may include charging stations at vertiports, along flight routes, and in other public areas. Charging stations are needed to recharge the batteries of electric AAM vehicles. Air traffic management systems are necessary to ensure the safe and efficient movement of AAM vehicles through the airspace. Communication networks are needed to transmit data between AAM vehicles and ground-based systems, such as air traffic control and vehicle charging infrastructure.
- Navigation and Surveillance: The Global Positioning System (GPS) is a satellite-based navigation system that provides accurate position information to AAM vehicles. GPS is a widely used navigation technology, and is reliable and accurate. Moreover, ADS-B (Automatic Dependent Surveillance-Broadcast) is a system that allows AAM vehicles to transmit and receive real-time position and flight information to other aircraft and air traffic control. ADS-B can improve situational awareness and help to prevent collisions between AAM vehicles [26]. ADS-B uses GPS technology to determine the precise location of an aircraft, and then broadcasts that information to ground stations and other nearby aircraft. This technology enables air traffic controllers to monitor the movement of aircraft more accurately and efficiently than traditional radar-based systems [27]. It also allows pilots to see the position of other aircraft in the area, reducing the risk of collisions and improving situational awareness. ADS-B is becoming increasingly popular as a surveillance tool for air traffic control due to its accuracy and reliability. In fact, many countries have mandated that all aircraft must be equipped with ADS-B transponders in order to fly in their airspace.
- Sensor and Sensing: Light detection and ranging (LiDAR) is a technology that uses laser pulses to measure distance and create a 3D map of the environment. LiDAR can be used to detect and avoid obstacles in the airspace, such as buildings, trees, and other AAM vehicles. The payload capacity of AAM vehicles varies depending on the type and size of the vehicle, as well as the range and mission requirements. Small electric AAM vehicles, such as drones and VTOL vehicles, typically have a lower payload capacity of a few hundred pounds or less. Larger AAM vehicles, such as air taxis and passenger drones, can have a higher payload capacity of several thousand pounds or more.
- Safety: AAM vehicles will require regular maintenance and inspection to ensure they are in safe operating condition, and to identify and address any potential safety issues. The interconnection between social, safety, and regulatory challenges of AMM is closely tied to the certification and policies governing the operation of UAM vehicles set by regulatory bodies [28].
- Operation: Incorporating UAM operations into the National Airspace System, particularly in the vicinity of major airports, presents a significant challenge [29]. To operate AAM vehicles safely and efficiently, appropriate infrastructure and airspace management systems will need to be established. This may include dedicated landing pads or vertiports, as well as airspace corridors and traffic management systems, to ensure safe separation between AAM vehicles and other aircraft.
- Communications Infrastructure: One of the challenges of AAM communications is the need to support a variety of different communication technologies and protocols, including voice, data, and video communications. AAM vehicles may use satellite-based communications, cellular networks, or dedicated communications networks to transmit information and communicate with ground operators and other vehicles [30]. One important aspect of the communication infrastructure will be the use of 5G technology, whose networks offer high-bandwidth, low-latency connectivity, which will be critical for supporting the real-time communication and data exchange required for the safe and efficient operation of eVTOL aircraft. Another important aspect of the communication infrastructure will be the use of unmanned traffic management (UTM) systems [31]. These systems will enable the tracking and management of eVTOL aircraft in urban airspace, helping to prevent collisions and ensure safe operations. UTM systems will rely on real-time data from eVTOL aircraft, as well as data from ground-based sensors and other sources.
2.1. Air Mobility Vehicle Design
- Electric Multicopters: These are small, multirotor aircraft that use electric motors for propulsion. They have vertical takeoff and landing capabilities, which makes them suitable for operating in confined spaces. They typically have a range of around 50 km and a payload capacity of up to 100 kg.
- Hybrid Tiltrotors: These are aircraft that use a combination of fixed wings and rotors that can tilt to provide both vertical and horizontal flight. They are capable of longer ranges, up to 400 km, and can carry heavier payloads of up to 1000 kg.
- Electric Fixed-Wing Aircraft: These are aircraft that use fixed wings and electric motors for propulsion. They require a runway for takeoff and landing, and have a range of around 100 km. They are suitable for carrying payloads of up to 500 kg.
- Hydrogen Fuel-Cell Multicopters: These are similar to electric multicopters, but they use hydrogen fuel cells for power instead of electric batteries. They have a longer range of up to 200 km and can carry payloads of up to 150 kg.
- Gasoline Combustion Fixed-Wing Aircraft: These are similar to electric fixed-wing aircraft, but they use gasoline combustion engines for power. They are capable of longer ranges, up to 500 km, and can carry heavier payloads of up to 1000 kg.
2.2. Vertiport Infrastructure Approach
2.3. Air Mobility Ecosystem
2.4. Business Models and Barriers
2.5. Data Management Platform
3. Connected Sustainability
3.1. Advanced Connectivity
3.2. ATC Communication Requirements
3.3. Reliable Operations and Services
4. Aeronautical Communications Architecture
5. Future Communications Infrastructure
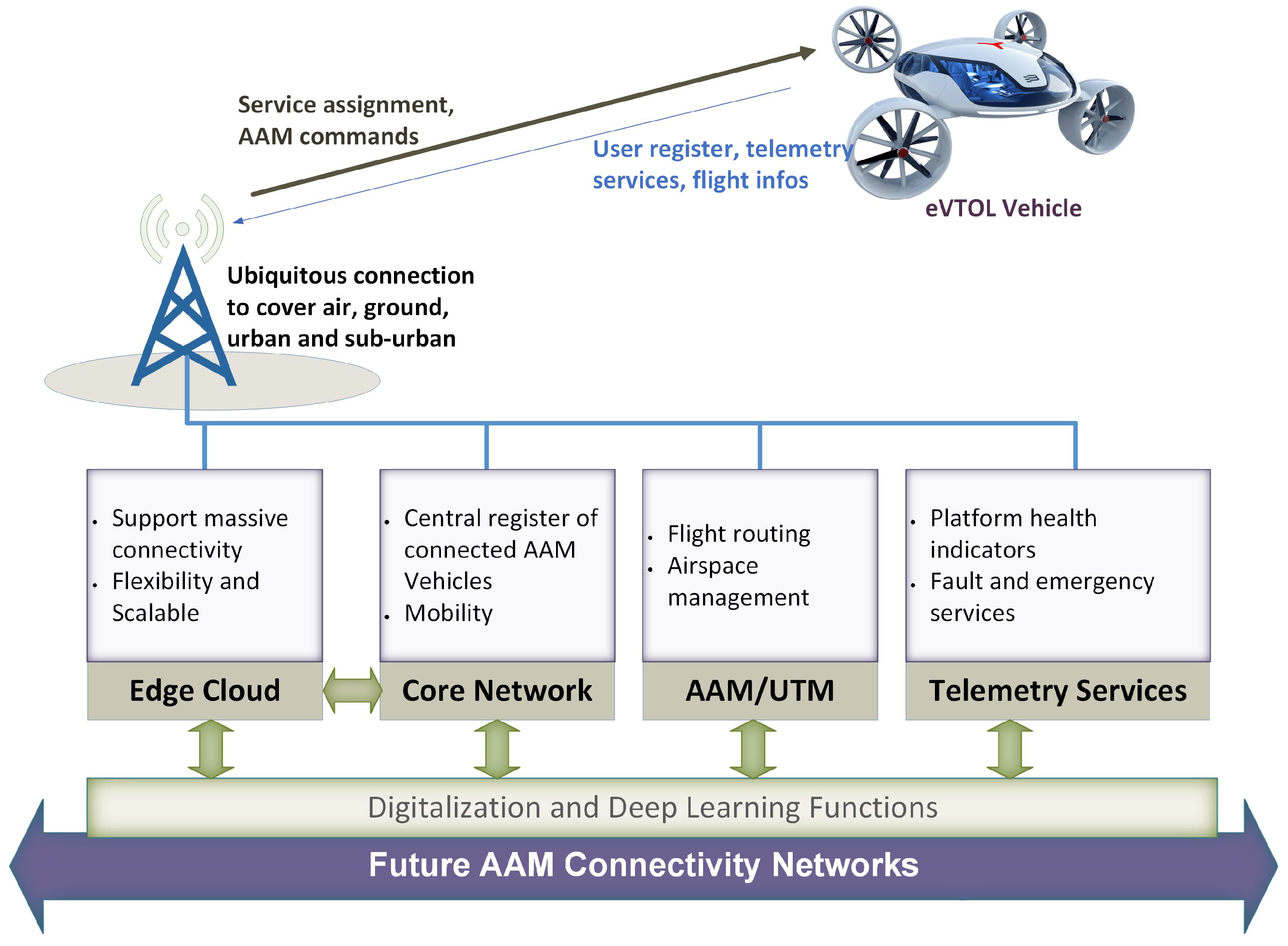
- In Localized Mode, the AAM vehicle connectivity and service management will be provisioned by the local geonetwork base station and core functionalities in collaboration with UTM entities. This mode is likely to occur when an AAM vehicle is flying within the local network boundaries. This interaction between AAM vehicles and local networks will reduce the end-to-end time delays incurred when processing the service assignment and access though large scale-networks, similar to edge computing models in 5G. Therefore, the AAM vehicle’s association with the local geonetwork will be terminated when the AAM vehicle conducts handover and registers with a neighboring subnetwork.
- In Centralized Mode, the AAM vehicle connectivity is provided by the local network resources (e.g., base station, external connectivity to application server, etc.), while service provisioning is performed by core network entities. This mode assumes that the core network will be able to instantiate a logical overlaid networkthat overwrites all local network policies for AAM vehicle slices of service. This mode is triggered when a fleet of associated AAM vehicles swarm multiple local networks at the same time, or during emergencies when governing authorities take control over the entire airspace.
6. Air-to-Ground Connectivity
AAM Connectivity Performance Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IEEE UAS Standards Tracking and Standards Development Related Research Needs; IEEE: Piscataway, NJ, USA, 2023; pp. 1–21.
- Chen, J. Integrated Routing and Charging Scheduling for Autonomous Electric Aerial Vehicle System. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Carr, S.; Neogi, N.; Topcu, U. Decentralized Control Synthesis for Air Traffic Management in Urban Air Mobility. IEEE Trans. Control Netw. Syst. 2021, 8, 598–608. [Google Scholar] [CrossRef]
- Namuduri, K.; Fiebig, U.C.; Matolak, D.W.; Guvenc, I.; Hari, K.; Määttänen, H.L. Advanced Air Mobility: Research Directions for Communications, Navigation, and Surveillance. IEEE Veh. Technol. Mag. 2022, 17, 65–73. [Google Scholar] [CrossRef]
- Gillani, R.; Jahan, S.; Majid, I. A Proposed Communication, Navigation & Surveillance System Architecture to Support Urban Air Traffic Management. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Bandelier, K.; Al-Rubaye, S.; Savazzi, S.; Namuduri, K. Vehicle-to-Vehicle (V2V) Unmanned Aerial Vehicle (UAV) Communication Based on Use Cases; IEEE: Piscataway, NJ, USA, 2023; pp. 1–24. [Google Scholar]
- Gómez Depoorter, D.; Kellerer, W. Designing the Air–Ground Data Links for Future Air Traffic Control Communications. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 135–146. [Google Scholar] [CrossRef]
- Cenk Ertürk, M.; Hosseini, N.; Jamal, H.; Şahin, A.; Matolak, D.; Haque, J. Requirements And Technologies Towards Uam: Communication, Navigation, And Surveillance. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 8–10 September 2020; pp. 2–15. [Google Scholar] [CrossRef]
- Brunelli, M.; Ditta, C.C.; Postorino, M.N. A Framework to Develop Urban Aerial Networks by Using a Digital Twin Approach. Drones 2022, 6, 387. [Google Scholar] [CrossRef]
- Ozpolat, M.; Al-Rubaye, S.; Williamson, A.; Tsourdos, A. Integration of Unmanned Aerial Vehicles and LTE: A Scenario-Dependent Analysis. In Proceedings of the 2022 International Conference on Connected Vehicle and Expo (ICCVE), Online, 8–10 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zulkifley, M.A.; Subki, M.G.; Behjati, M.; Nordin, R.; Abdullah, N.F. Mobile Communications and Parachute Systems for Safe Beyond Visual Line of Sight (BVLoS) UAV Operation. In Proceedings of the 2022 IEEE 6th International Symposium on Telecommunication Technologies (ISTT), Johor Bahru, Malaysia, 14–16 November 2022; pp. 22–27. [Google Scholar] [CrossRef]
- Siewert, S.; Sampigethaya, K.; Buchholz, J.; Rizor, S. Fail-Safe, Fail-Secure Experiments for Small UAS and UAM Traffic in Urban Airspace. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Ullah, Z.; Al-Turjman, F.; Mostarda, L. Cognition in UAV-Aided 5G and Beyond Communications: A Survey. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 872–891. [Google Scholar] [CrossRef]
- Bhat, J.R.; Alqahtani, S.A. 6G Ecosystem: Current Status and Future Perspective. IEEE Access 2021, 9, 43134–43167. [Google Scholar] [CrossRef]
- Ziegler, V.; Yrjölä, S. How To Make 6G a General Purpose Technology: Prerequisites and value creation paradigm shift. In Proceedings of the 2021 Joint European Conference on Networks and Communications 6G Summit (EuCNC/6G Summit), Porto, Portugal, 8–11 June 2021; 2021; pp. 586–591. [Google Scholar] [CrossRef]
- Al-Rubaye, S.; Al-Dulaimi, A.; Ni, Q. Power Interchange Analysis for Reliable Vehicle-to-Grid Connectivity. IEEE Commun. Mag. 2019, 57, 105–111. [Google Scholar] [CrossRef]
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef]
- Tang, F.; Kawamoto, Y.; Kato, N.; Liu, J. Future Intelligent and Secure Vehicular Network Toward 6G: Machine-Learning Approaches. Proc. IEEE 2020, 108, 292–307. [Google Scholar] [CrossRef]
- Basso, M.; Zacarias, I.; Tussi Leite, C.E.; Wang, H.; Pignaton de Freitas, E. A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems. Drones 2018, 2, 26. [Google Scholar] [CrossRef]
- Keeler, J.N.; Verma, S.A.; Edwards, T. Investigation of Communications Involved in Near-term UAM Operations. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Jordan, A.; Jaskowska, K.K.; Monsalve, A.; Yang, R.; Rozenblat, M.; Freeman, K.; Garcia, S. Systematic Evaluation of Cybersecurity Risks in the Urban Air Mobility Operational Environment. In Proceedings of the 2022 Integrated Communication, Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 5–7 April 2022; pp. 1–15. [Google Scholar] [CrossRef]
- Li, X. Repurposing Existing Infrastructure for Urban Air Mobility: A Scenario Analysis in Southern California. Drones 2023, 7, 37. [Google Scholar] [CrossRef]
- Hodell, G.; Dao, Q.; Homola, J.; Goodyear, M.; Kalush, S.; Swaroop, S.; Jun, Y. Usability Evaluation of Fleet Management Interface for High Density Vertiplex Environments. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Qiu, H.; Tian, J.; Yu, J. Improving Aircraft Maintenance Operations Through Model Based Definition Maintenance Support System. In Proceedings of the 2019 IEEE 1st International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Kunming, China, 17–19 October 2019; pp. 125–130. [Google Scholar] [CrossRef]
- Valovage, E. Enhanced ADS-B Research. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 35–38. [Google Scholar] [CrossRef]
- Hegarty, C.J.; Chatre, E. Evolution of the Global Navigation SatelliteSystem (GNSS). Proc. IEEE 2008, 96, 1902–1917. [Google Scholar] [CrossRef]
- Gunady, N.I.; Patel, S.R.; DeLaurentis, D. A System-of-Systems Approach to Analyzing Future Advanced Air Mobility Cargo Operations. In Proceedings of the 2022 17th Annual System of Systems Engineering Conference (SOSE), Rochester, NY, USA, 7–11 June 2022; pp. 368–373. [Google Scholar] [CrossRef]
- Verma, S.; Dulchinos, V.; Wood, R.D.; Farrahi, A.; Mogford, R.; Shyr, M.; Ghatas, R. Design and Analysis of Corridors for UAM Operations. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–10. [Google Scholar] [CrossRef]
- Gozalvez, J.; Sepulcre, M.; Bauza, R. IEEE 802.11p vehicle to infrastructure communications in urban environments. IEEE Commun. Mag. 2012, 50, 176–183. [Google Scholar] [CrossRef]
- Costa, J.; Matos, R.; Araujo, J.; Li, J.; Choi, E.; Nguyen, T.A.; Lee, J.W.; Min, D. Software Aging Effects on Kubernetes in Container Orchestration Systems for Digital Twin Cloud Infrastructures of Urban Air Mobility. Drones 2023, 7, 35. [Google Scholar] [CrossRef]
- Partheepan, S.; Sanati, F.; Hassan, J. Autonomous Unmanned Aerial Vehicles in Bushfire Management: Challenges and Opportunities. Drones 2023, 7, 47. [Google Scholar] [CrossRef]
- Preis, L.; Hornung, M. Vertiport Operations Modeling, Agent-Based Simulation and Parameter Value Specification. Electronics 2022, 11, 1071. [Google Scholar] [CrossRef]
- Lee, H.; Moolchandani, K.A.; Arneson, H. Demand Capacity Balancing at Vertiports for Initial Strategic Conflict Management of Urban Air Mobility Operations. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–10. [Google Scholar] [CrossRef]
- Dulia, E.F.; Sabuj, M.S.; Shihab, S.A.M. Benefits of Advanced Air Mobility for Society and Environment: A Case Study of Ohio. Appl. Sci. 2022, 12, 207. [Google Scholar] [CrossRef]
- Patel, S.R.; Gunady, N.I.; Rao, A.K.; Wright, E.C.; DeLaurentis, D. Modeling Energy Infrastructure of Future Electric Urban Air Mobility Operations. In Proceedings of the 2022 17th Annual System of Systems Engineering Conference (SOSE), Rochester, NY, USA, 7–11 June 2022; pp. 382–387. [Google Scholar] [CrossRef]
- Almeaibed, S.; Al-Rubaye, S.; Tsourdos, A.; Avdelidis, N.P. Digital Twin Analysis to Promote Safety and Security in Autonomous Vehicles. IEEE Commun. Stand. Mag. 2021, 5, 40–46. [Google Scholar] [CrossRef]
- Schnell, M.; Epple, U.; Shutin, D.; Schneckenburger, N. LDACS: Future aeronautical communications for air-traffic management. IEEE Commun. Mag. 2014, 52, 104–110. [Google Scholar] [CrossRef]
- Matolak, D.W.; Sun, R. Air–Ground Channel Characterization for Unmanned Aircraft Systems—Part III: The Suburban and Near-Urban Environments. IEEE Trans. Veh. Technol. 2017, 66, 6607–6618. [Google Scholar] [CrossRef]
- Letaief, K.B.; Chen, W.; Shi, Y.; Zhang, J.; Zhang, Y.A. The Roadmap to 6G: AI Empowered Wireless Networks. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef]
- Matinmikko-Blue, M. Sustainability and Spectrum Management in the 6G ERA. In Proceedings of the 2021 ITU Kaleidoscope: Connecting Physical and Virtual Worlds (ITU K), Geneva, Switzerland, 6–10 December 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Plass, S. Seamless networking for aeronautical communications: One major aspect of the SANDRA concept. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 21–27. [Google Scholar] [CrossRef]
- Neji, N.; de Lacerda, R.; Azoulay, A.; Letertre, T.; Outtier, O. Survey on the Future Aeronautical Communication System and Its Development for Continental Communications. IEEE Trans. Veh. Technol. 2013, 62, 182–191. [Google Scholar] [CrossRef]
- Sakhaee, E.; Jamalipour, A.; Kato, N. Aeronautical ad hoc networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, WCNC 2006, Las Vegas, NV, USA, 3–6 April 2006; Volume 1, pp. 246–251. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, T.; Zhong, S.; Wang, J.; Zhang, W.; Zuo, X.; Maunder, R.G.; Hanzo, L. Aeronautical AdHoc Networking for the Internet-Above-the-Clouds. Proc. IEEE 2019, 107, 868–911. [Google Scholar] [CrossRef]
- Djuknic, G.; Freidenfelds, J.; Okunev, Y. Establishing wireless communications services via high-altitude aeronautical platforms: A concept whose time has come? IEEE Commun. Mag. 1997, 35, 128–135. [Google Scholar] [CrossRef]
- Pongsakornsathien, N.; Gardi, A.; Bijjahalli, S.; Sabatini, R.; Kistan, T. A Multi-Criteria Clustering Method for UAS Traffic Management and Urban Air Mobility. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Towhidlou, V.; Al-Rubaye, S.; Tsourdos, A. LTE Handover Design for Cellular-Connected Aircraft. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Orye, E.; Visky, G.; Maennel, O. Analysing the Actual Use of Controller–Pilot Data Link Communications. Eng. Proc. 2022, 28, 18. [Google Scholar]
- Bae, J.; Lee, H.; Lee, H. A Study on Communication Technologies for Urban Air Mobility. In Proceedings of the 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 2235–2240. [Google Scholar] [CrossRef]
- Ho, F.; Geraldes, R.; Gonçalves, A.; Rigault, B.; Sportich, B.; Kubo, D.; Cavazza, M.; Prendinger, H. Decentralized Multi-Agent Path Finding for UAV Traffic Management. IEEE Trans. Intell. Transp. Syst. 2020, 1–12. [Google Scholar] [CrossRef]
- Al-Rubaye, S.; Tsourdos, A. Airport Connectivity Optimization for 5G Ultra-Dense Networks. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 980–989. [Google Scholar] [CrossRef]
- Lei, K.; Zhang, Q.; Lou, J.; Bai, B.; Xu, K. Securing ICN-Based UAV Ad Hoc Networks with Blockchain. IEEE Commun. Mag. 2019, 57, 26–32. [Google Scholar] [CrossRef]
- Ansari, S.; Taha, A.; Dashtipour, K.; Sambo, Y.; Abbasi, Q.; Imran, M. Urban Air Mobility—A 6G Use Case? Front. Commun. Netw. 2021, 2, 729767. [Google Scholar] [CrossRef]
- Prados-Garzon, J.; Adamuz-Hinojosa, O.; Ameigeiras, P.; Ramos-Munoz, J.J.; Andres-Maldonado, P.; Lopez-Soler, J.M. Handover implementation in a 5G SDN-based mobile network architecture. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- IEEE P1914.1/D5.0; IEEE Draft Standard for Packet-based Fronthaul Transport Networks. IEEE: Piscataway, NJ, USA, 2019; pp. 1–89.
- Mishra, D.; Vegni, A.M.; Loscrí, V.; Natalizio, E. Drone Networking in the 6G Era: A Technology Overview. IEEE Commun. Stand. Mag. 2021, 5, 88–95. [Google Scholar] [CrossRef]
- Zeng, T.; Semiari, O.; Saad, W.; Bennis, M. Performance Analysis of Aircraft-to-Ground Communication Networks in Urban Air Mobility (UAM). In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Cruz-Perez, F.; Hernandez-Valdez, G.; Ortigoza-Guerrero, L. Performance evaluation of mobile wireless communication systems with link adaptation. IEEE Commun. Lett. 2003, 7, 587–589. [Google Scholar] [CrossRef]
- ISO/IEC/IEEE 8802-11:2012(E) (Revison of ISO/IEC/IEEE 8802-11-2005 and Amendments); ISO/IEC/IEEE International Standard-Information Technology–Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks–Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE: Piscataway, NJ, USA, 2012; pp. 1–2798. [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Units |
|---|---|---|
| Range | Maximum distance an AAM vehicle can travel on a single charge or fuel load | km, mi |
| Endurance | Maximum time an AAM vehicle can remain airborne on a single charge or fuel load | h |
| Payload Capacity | Maximum weight an AAM vehicle can carry, including passengers and cargo | kg, lb |
| Speed | Maximum cruising speed of an AAM vehicle | km/h, mph |
| Altitude | Maximum flight altitude of an AAM vehicle | m, ft |
| Noise Level | Acoustic power level generated by an AAM vehicle during operation | dB |
| Energy Efficiency | Energy consumed by an AAM vehicle per unit distance or time | kWh/km, kWh/h |
| Charging Time | Time required to fully charge the battery of an AAM vehicle | h |
| Takeoff/Landing Distance | Minimum distance required for an AAM vehicle to take off or land | m, ft |
| Operational Cost | Total cost of operating an AAM vehicle, including maintenance and fuel/electricity costs | USD/h, USD/km |
| Ingress/Egress Time | Time it takes to board and disembark from the AAM vehicle | s |
| Pricing | Cost per passenger for AAM service | USD/, passenger |
| Network Design | Physical and operational infrastructure of the AAM network | N/A |
| Modal Transfer | Integration of AAM with other modes of transportation | N/A |
| Vehicle Type | Range | Payload Capacity | Max Speed | Altitude |
|---|---|---|---|---|
| Electric Multicopter | 50 km | 100 kg | 160 km/h | 2000 m |
| Hybrid Tiltrotor | 400 km | 1000 kg | 300 km/h | 4000 m |
| Electric Fixed-Wing | 100 km | 500 kg | 200 km/h | 3000 m |
| Hydrogen Fuel-Cell Multicopter | 200 km | 150 kg | 120 km/h | 2500 m |
| Gasoline Combustion Fixed-Wing | 500 km | 1000 kg | 300 km/h | 5000 m |
| Parameter | 4G | 5G | 6G |
|---|---|---|---|
| Peak data rate | 1 Gbps | 20 Gbps | 1000 Gbps |
| User Data Rate | 10 Mbps | 100 Mbps | 1 Gbps |
| Peak Spectral Efficiency | 15 bps/Hz | 30 bps/Hz | 50 bps/Hz |
| Mobility | 350 km/h | 500 km/h | |
| Latency | 10 ms | 1 ms | 0.1 ms |
| System | Frequency Range | Application |
|---|---|---|
| VHF | 118–136 MHz | Voice Communications |
| HF | 2–29.7 MHz | Long-Range Voice and Data Communications |
| UHF | 225–400 MHz | Line-of-Sight Voice and Data Communications |
| Satellite | Various | Beyond Line-of-Sight Voice and Data Communications |
| ADS-B | 978–1090 MHz | Aircraft Position Reporting and Traffic Information |
| ACARS | VHF, HF, or Satellite | Aircraft Communications Addressing and Reporting System |
| Parameter | Definition | Units |
|---|---|---|
| Latency | Round-trip time for data to travel between AAM vehicle and ground station | ms |
| Data Rate | Maximum amount of data that can be transmitted per second | Mbps |
| Reliability | Probability that data are delivered without errors or delays | % |
| Coverage | Area of service coverage provided by 5G network | km2, mi2 |
| Bandwidth | Range of frequencies available for communication | GHz |
| Mobility | Ability of AAM vehicle to maintain connectivity while moving | km/h, mph |
| Spectrum Efficiency | Amount of data that can be transmitted per unit of frequency spectrum | bps/Hz |
| Availability | Percentage of time that 5G network is operational | % |
| Security | Level of protection against unauthorized access or data breaches | N/A |
| Interference | Level of interference from other wireless devices or networks | dB |
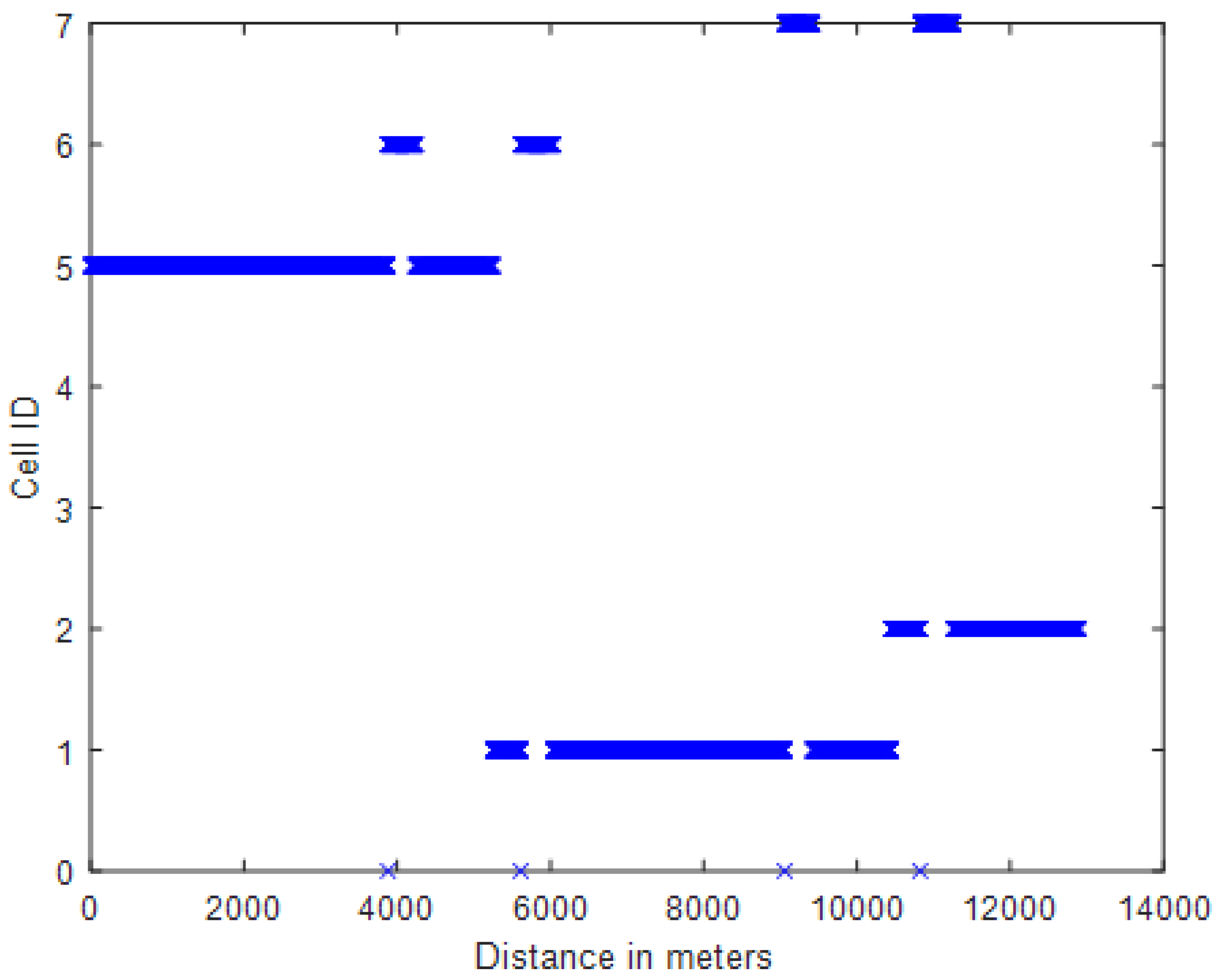
| Parameter | Value |
|---|---|
| No. of cells | 7 |
| No. of base stations | 7 |
| Flight distance | 14 km |
| No. of sidelobes | 2 |
| Sidelobe beamwidth | (18.15) degrees |
| Speed of the AAM vehicle | 30 m/s |
| Time to trigger (TTT) | 0.25 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Rubaye, S.; Tsourdos, A.; Namuduri, K. Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones 2023, 7, 319. https://doi.org/10.3390/drones7050319
Al-Rubaye S, Tsourdos A, Namuduri K. Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones. 2023; 7(5):319. https://doi.org/10.3390/drones7050319
Chicago/Turabian StyleAl-Rubaye, Saba, Antonios Tsourdos, and Kamesh Namuduri. 2023. "Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle" Drones 7, no. 5: 319. https://doi.org/10.3390/drones7050319
APA StyleAl-Rubaye, S., Tsourdos, A., & Namuduri, K. (2023). Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones, 7(5), 319. https://doi.org/10.3390/drones7050319