
Exterminator for the Nests of Vespa velutina nigrithorax Using an Unmanned Aerial Vehicle

Abstract
1. Introduction
2. Materials and Methods
2.1. Determination of Exterminator Requirements
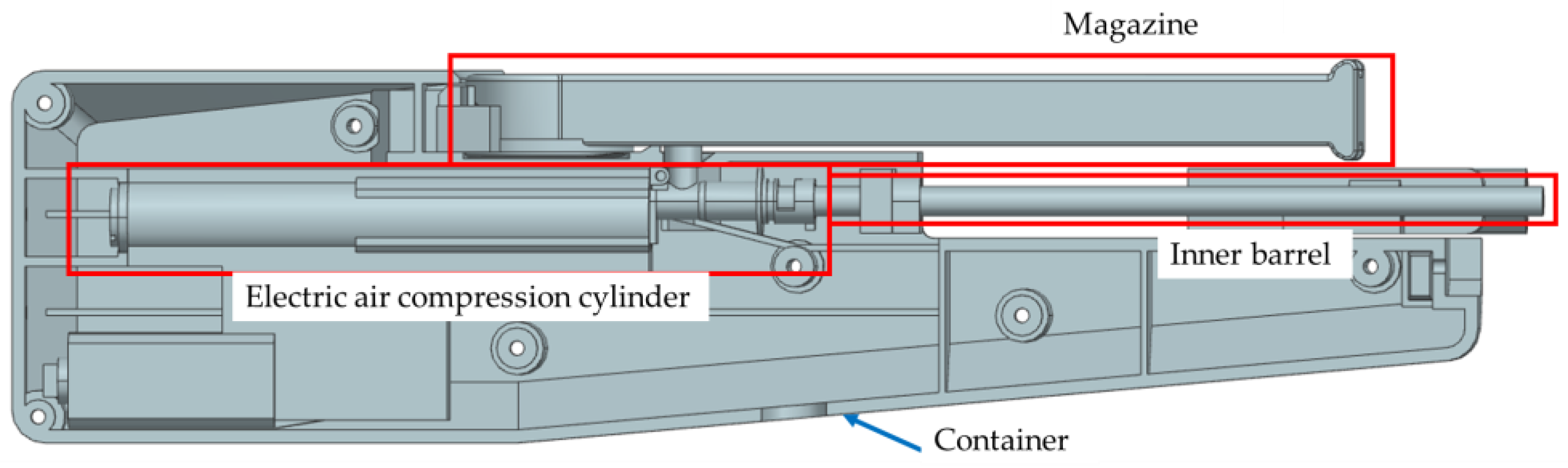
2.2. System Design and Development
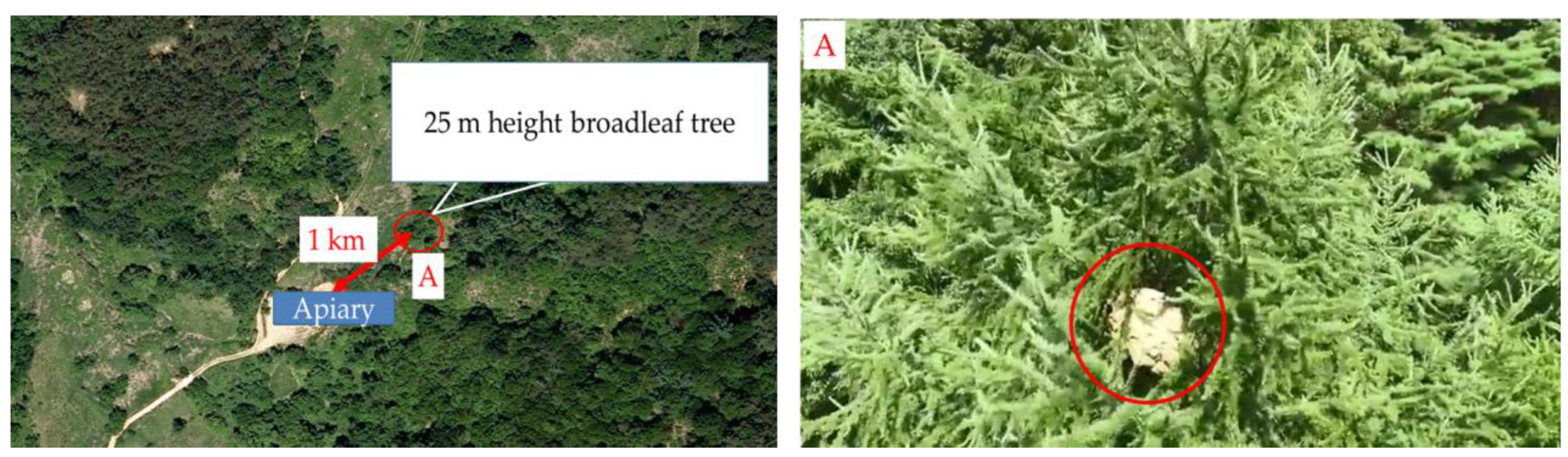
2.3. Experimental Test
2.4. Economic Feasibility of the Proposed Method
3. Results and Discussion
3.1. Exterminator Requirements
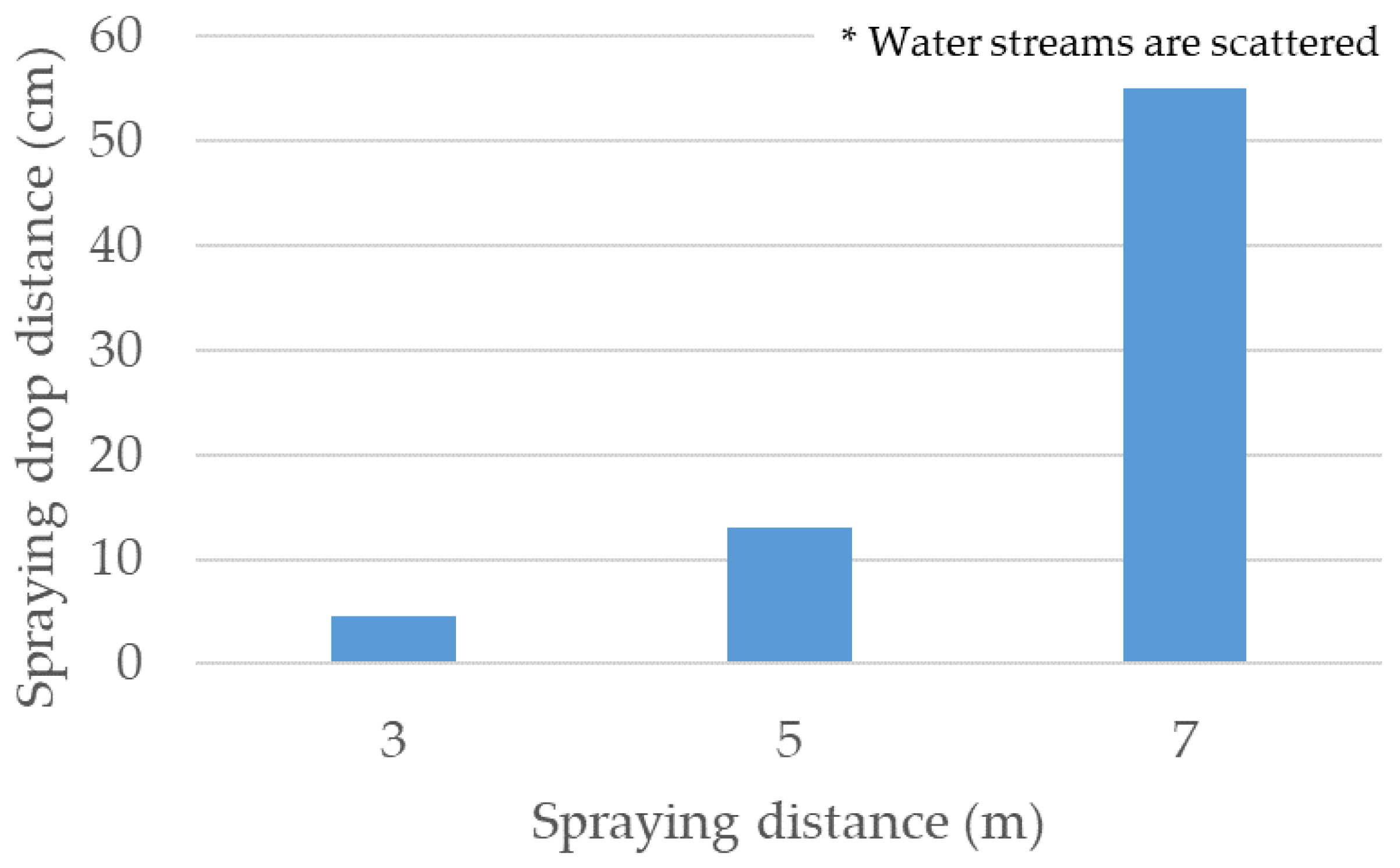
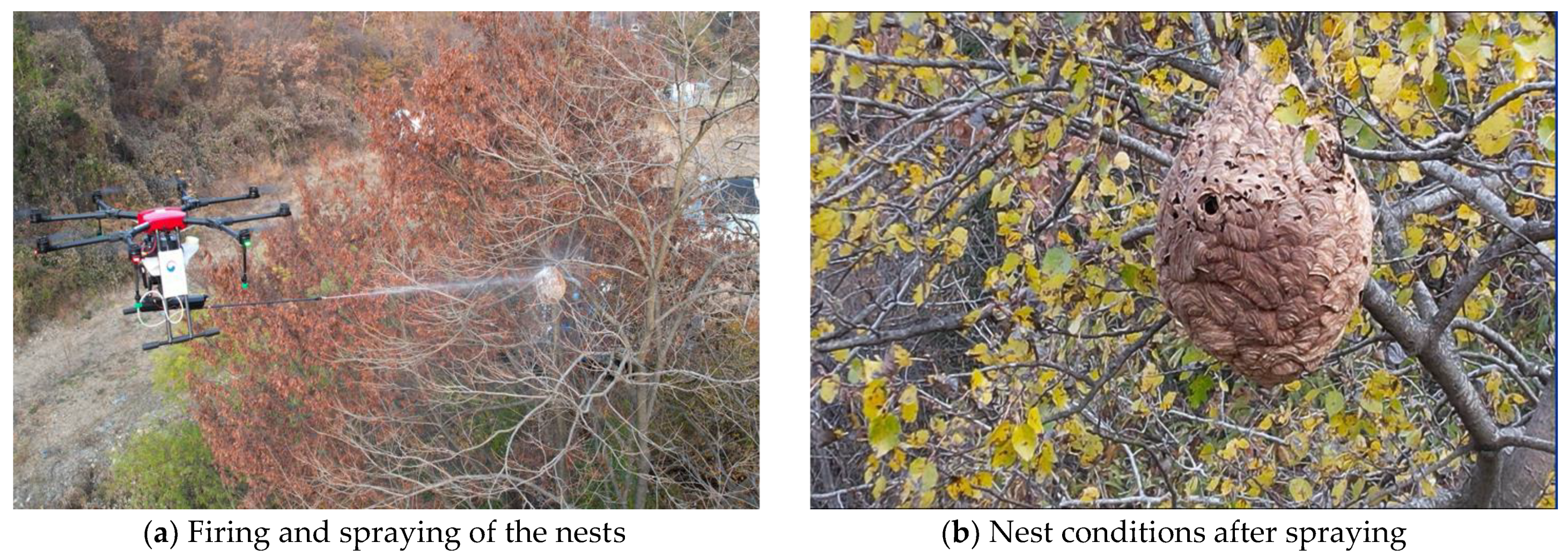
3.2. Exterminator Performance
3.3. Economic Feasibility of the Proposed Method
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Archer, M.E. Taxonomy, distribution and nesting biology of species of the genera Provespa Ashmead and Vespa Linnaeus (Hymenoptera, Vespidae). Entomol. Mon. Mag. 2008, 144, 69–101. [Google Scholar]
- Jung, C.; Kim, D.; Lee, H.-S.; Baek, H. Some Biological Characteristics of a New Honeybee Pest, Vespa velutina nigrithorax Buysson, 1905 (Hymenoptera: Vespidae). J. Apic. 2009, 24, 61–65. (In Korean) [Google Scholar]
- Rome, Q.; Perrard, A.; Muller, F.; Villemant, C. Monitoring and control modalities of a honeybee predator, the yellow-legged hornet Vespa velutina nigrithorax (Hymenoptera: Vespidae). Aliens 2011, 31, 7–15. [Google Scholar]
- Carpenter, J.; Kojima, J. Checklist of the species in the subfamily Vespinae (Insecta: Hymenoptera: Vespidae). Nat. Hist. Bull. Ibaraki Univ. 1997, 1, 51–92. [Google Scholar]
- EPPO. EPPO Global Database. Available online: https://gd.eppo.int/taxon/VESPVE/distribution (accessed on 20 April 2023).
- Kishi, S.; Goka, K. Review of the invasive yellow-legged hornet, Vespa velutina nigrithorax (Hymenoptera: Vespidae), in Japan and its possible chemical control. Appl. Èntomol. Zoöl. 2017, 52, 361–368. [Google Scholar] [CrossRef]
- A Shah, F.; Shah, T.A. Vespa Velutina, a Serious Pest of Honey Bees in Kashmir. Bee World 1991, 72, 161–164. [Google Scholar] [CrossRef]
- Laurino, D.; Lioy, S.; Carisio, L.; Manino, A.; Porporato, M. Vespa velutina: An Alien Driver of Honey Bee Colony Losses. Diversity 2019, 12, 5. [Google Scholar] [CrossRef]
- Feás, X. Human Fatalities Caused by Hornet, Wasp and Bee Stings in Spain: Epidemiology at State and Sub-State Level from 1999 to 2018. Biology 2021, 10, 73. [Google Scholar] [CrossRef]
- Jung, C. Initial Stage Risk Assessment of an Invasive Hornet, Vespa velutina nigrithorax Buysson (Hymenoptera: Vespidae) in Korea. J. Apic. 2012, 27, 95–104. (In Korean) [Google Scholar]
- Choi, M.B.; Martin, S.J.; Lee, J.W. Distribution, spread, and impact of the invasive hornet Vespa velutina in South Korea. J. Asia-Pac. Èntomol. 2012, 15, 473–477. [Google Scholar] [CrossRef]
- Tan, K.; Hu, Z.; Chen, W.; Wang, Z.; Wang, Y.; Nieh, J.C. Fearful Foragers: Honey Bees Tune Colony and Individual Foraging to Multi-Predator Presence and Food Quality. PLoS ONE 2013, 8, e75841. [Google Scholar] [CrossRef] [PubMed]
- Bertolino, S.; Lioy, S.; Laurino, D.; Manino, A.; Porporato, M. Spread of the invasive yellow-legged hornet Vespa velutina (Hymenoptera: Vespidae) in Italy. Appl. Èntomol. Zoöl. 2016, 51, 589–597. [Google Scholar] [CrossRef]
- Chauzat, M.-P.; Martin, S. A foreigner in France: The Asian hornet. Biologist 2009, 56, 86–91. [Google Scholar]
- Turchi, L.; Derijard, B. Options for the biological and physical control of Vespa velutina nigrithorax (Hym.: Vespidae) in Europe: A review. J. Appl. Èntomol. 2018, 142, 553–562. [Google Scholar] [CrossRef]
- Arca, M.; Mougel, F.; Guillemaud, T.; Dupas, S.; Rome, Q.; Perrard, A.; Muller, F.; Fossoud, A.; Capdevielle-Dulac, C.; Torres-Leguizamon, M.; et al. Reconstructing the invasion and the demographic history of the yellow-legged hornet, Vespa velutina, in Europe. Biol. Invasions 2015, 17, 2357–2371. [Google Scholar] [CrossRef]
- de Haro, L.; Labadie, M.; Chanseau, P.; Cabot, C.; Blanc-Brisset, I.; Penouil, F. Medical consequences of the Asian black hornet (Vespa velutina) invasion in Southwestern France. Toxicon 2010, 55, 650–652. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez-Flores, M.S.; Seijo-Rodríguez, A.; Escuredo, O.; Seijo-Coello, M.D.C. Spreading of Vespa velutina in northwestern Spain: Influence of elevation and meteorological factors and effect of bait trapping on target and non-target living organisms. J. Pest Sci. 2018, 92, 557–565. [Google Scholar] [CrossRef]
- Jung, C. Spatial Expansion of an Invasive Hornet, Vespa velutina nigrithorax Buysson (Hymenoptera: Vespidae) in Korea. J. Apic. 2012, 27, 87–93. (In Korean) [Google Scholar]
- Barbet-Massin, M.; Rome, Q.; Muller, F.; Perrard, A.; Villemant, C.; Jiguet, F. Climate change increases the risk of invasion by the Yellow-legged hornet. Biol. Conserv. 2013, 157, 4–10. [Google Scholar] [CrossRef]
- Barbet-Massin, M.; Salles, J.-M.; Courchamp, F. The economic cost of control of the invasive yellow-legged Asian hornet. Neobiota 2020, 55, 11–25. [Google Scholar] [CrossRef]
- Robinet, C.; Suppo, C.; Darrouzet, E. Rapid spread of the invasive yellow-legged hornet in France: The role of human-mediated dispersal and the effects of control measures. J. Appl. Ecol. 2016, 54, 205–215. [Google Scholar] [CrossRef]
- Braga, D.; Madureira, A. Towards a decision support system for the automatic detection of Asian hornets and removal planning. Int. J. Comput. Inf. Syst. Ind. Manag. Appl. 2020, 12, 239–247. [Google Scholar]
- Lioy, S.; Bianchi, E.; Biglia, A.; Bessone, M.; Laurino, D.; Porporato, M. Viability of thermal imaging in detecting nests of the invasive hornet Vespa velutina. Insect Sci. 2020, 28, 271–277. [Google Scholar] [CrossRef]
- Kennedy, P.J.; Ford, S.M.; Poidatz, J.; Thiéry, D.; Osborne, J.L. Searching for nests of the invasive Asian hornet (Vespa velutina) using radio-telemetry. Commun. Biol. 2018, 1, 88. [Google Scholar] [CrossRef] [PubMed]
- Leza, M.; Miranda, M.; Colomar, V. First detection of Vespa velutina nigrithorax (Hymenoptera: Vespidae) in the Balearic Islands (Western Mediterranean): A challenging study case. Biol. Invasions 2017, 20, 1643–1649. [Google Scholar] [CrossRef]
- Reynaud, L.; Guérin-Lassous, I. Design of a force-based controlled mobility on aerial vehicles for pest management. Ad Hoc Netw. 2016, 53, 41–52. [Google Scholar] [CrossRef]
- Gao, P.; Lee, K.; Kuswidiyanto, L.W.; Yu, S.-H.; Hu, K.; Liang, G.; Chen, Y.; Wang, W.; Liao, F.; Jeong, Y.S.; et al. Dynamic Beehive Detection and Tracking System Based on YOLO V5 and Unmanned Aerial Vehicle. J. Biosyst. Eng. 2022, 47, 510–520. [Google Scholar] [CrossRef]
- Goldarazena, A.; de Heredia, I.P.; Romon, P.; Iturrondobeitia, J.C.; Gonzalez, M.; Lopez, S. Spread of the yellow-legged hornet Vespa velutina nigrithorax du Buysson (Hymenoptera: Vespidae) across Northern Spain. EPPO Bull. 2015, 45, 133–138. [Google Scholar] [CrossRef]
- Rojas-Nossa, S.V.; Novoa, N.; Serrano, A.; Calviño-Cancela, M. Performance of baited traps used as control tools for the invasive hornet Vespa velutina and their impact on non-target insects. Apidologie 2018, 49, 872–885. [Google Scholar] [CrossRef]
- Sackmann, P.; Rabinovich, M.; Corley, J. Successful Removal of German Yellowjackets (Hymenoptera: Vespidae) by Toxic Baiting. J. Econ. Èntomol. 2001, 94, 811–816. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Del Cerro, J.; Ulloa, C.C.; Barrientos, A.; Rivas, J.D.L. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- FDIS 23117-1; Agricultural and Forestry Machinery—Unmanned Aerial Spraying Systems—Environmental Requirements. ISO: Geneva, Switzerland, 2021.
- Lee, C.-G.; Yu, S.-H.; Rhee, J.-Y. Effects of Unmanned Aerial Spray System Flight Altitude and Collector Height on Spray Deposition Measured Using a Food Dye Tracer. Agriculture 2022, 13, 96. [Google Scholar] [CrossRef]
- OECD. State of the Knowledge—Literature Review on Unmanned Aerial Spray Systems in Agriculture; OECD Publishing: Paris, France, 2021. [Google Scholar]
- Chen, P.; Douzals, J.P.; Lan, Y.; Cotteux, E.; Delpuech, X.; Pouxviel, G.; Zhan, Y. Characteristics of unmanned aerial spraying systems and related spray drift: A review. Front. Plant Sci. 2022, 13, 870956. [Google Scholar] [CrossRef]
- He, X.; James, B.; Andreas, H.; Jan, L. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- Morales-Rodríguez, P.A.; Cano, E.C.; Villena, J.; López-Perales, J.A. A Comparison between Conventional Sprayers and New UAV Sprayers: A Study Case of Vineyards and Olives in Extremadura (Spain). Agronomy 2022, 12, 1307. [Google Scholar] [CrossRef]
- Zhang, P.; Deng, L.; Lyu, Q.; He, S.; Yi, S.; Liu, Y.; Yu, Y.; Pan, H. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45–52. [Google Scholar]
- Wang, L.; Huang, X.; Li, W.; Yan, K.; Han, Y.; Zhang, Y.; Pawlowski, L.; Lan, Y. Progress in Agricultural Unmanned Aerial Vehicles (UAVs) Applied in China and Prospects for Poland. Agriculture 2022, 12, 397. [Google Scholar] [CrossRef]
- Sarri, D.; Martelloni, L.; Rimediotti, M.; Lisci, R.; Lombardo, S.; Vieri, M. Testing a multi-rotor unmanned aerial vehicle for spray application in high slope terraced vineyard. J. Agric. Eng. 2019, 50, 38–47. [Google Scholar] [CrossRef]
- Lim, D.-J.; Kim, S.-W.; Kim, Y.-E.; Yoon, J.-H.; Cho, H.-J.; Shin, B.-G.; Kim, H.-Y.; Kim, I.-S. Plant-Back Intervals of Imicyafos Based on Its Soil Dissipation and Plant Uptake for Rotational Cultivation of Lettuce and Spinach in Greenhouse. Agriculture 2021, 11, 495. [Google Scholar] [CrossRef]
- DIRECTIVE 2009/128/EC; Establishing a Framework for Community Action to Achieve the Sustainable Use of Pesticides. EU: Brussel, Belgium, 2009; pp. 71–86.
- Casida, J. Pyrethrum: The Natural Insecticide; Elsevier Science: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Krief, A. Pyrethroid insecticides. Chapter I. Synthesis, structure, biochemistry and biosynthesis of pyrethroids. ARKIVOC Online J. Org. Chem. 2021, 2021, 55–77. [Google Scholar] [CrossRef]
- You, H.-K.; Jeong, U.-S.; Chae, Y.-W.; Kim, S. An Analysis of Economic Feasibility and Perception of Drone for Pesticide Application. J. Korea Acad. Coop. Soc. 2021, 22, 235–245. [Google Scholar] [CrossRef]
- Leza, M.; Herrera, C.; Picó, G.; Morro, T.; Colomar, V. Six years of controlling the invasive species Vespa velutina in a Mediterranean island: The promising results of an eradication plan. Pest Manag. Sci. 2021, 77, 2375–2384. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Length (mm) | 1510 |
| Width (mm) | 1510 |
| Height (mm) | 750 |
| Weight (with battery) (kg) | 21.5 |
| FC | K++ |
| Rotor | XRotor Pro X6 |
| Number of rotors | 8 |
| Size of propeller (cm) | 58.42 |
| Maximum take-off weight (kg) | 36 |
| Capacity of the solution tank (L) | 10 |
| Flight time (min) | 8 |
| Depth from Nest Wall (cm) | 1 | 2 | 3 |
|---|---|---|---|
| Time to seepage (min) | 2.2 | 5 | No seepage |
| Treatment | Number of Hornets Entering the Nest per Minute 1 Week after Spraying | Control Effect |
|---|---|---|
| 10% pyrethrum extract | 4 ± 2.5 | x |
| 15% pyrethrum extract | 0 | o |
| 10% pyrethrum extract + 10% sugar + 10% formic acid + 1% bee shred | 0 | o |
| Classification | Control | Exterminator |
|---|---|---|
| Equipment price (won) | 1,000,000 | 20,000,000 |
| Lifetime (years) | 5 | 5 |
| Annual usage time (hour) | 100 | 100 |
| Labor cost (won/h) | 24,165 | 24,165 |
| Expense (won/h) | 27,015 | 81,165 |
| Working time per session (h/session) | 2.0 | 0.3 |
| Cost (won/session) | 54,030 | 24,350 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-G.; Yu, S.-H. Exterminator for the Nests of Vespa velutina nigrithorax Using an Unmanned Aerial Vehicle. Drones 2023, 7, 281. https://doi.org/10.3390/drones7040281
Lee C-G, Yu S-H. Exterminator for the Nests of Vespa velutina nigrithorax Using an Unmanned Aerial Vehicle. Drones. 2023; 7(4):281. https://doi.org/10.3390/drones7040281
Chicago/Turabian StyleLee, Chun-Gu, and Seung-Hwa Yu. 2023. "Exterminator for the Nests of Vespa velutina nigrithorax Using an Unmanned Aerial Vehicle" Drones 7, no. 4: 281. https://doi.org/10.3390/drones7040281
APA StyleLee, C.-G., & Yu, S.-H. (2023). Exterminator for the Nests of Vespa velutina nigrithorax Using an Unmanned Aerial Vehicle. Drones, 7(4), 281. https://doi.org/10.3390/drones7040281