


SiamMAN: Siamese Multi-Phase Aware Network for Real-Time Unmanned Aerial Vehicle Tracking

Abstract
:1. Introduction
- (1)
- We propose a novel multi-phase Siamese tracking method, SiamMAN, to enhance the network’s ability to distinguish feature representations for the task of aerial tracking to improve accuracy in scenarios with high requirements at different feature levels. Specifically, the response map context encoder (RCE) module achieves optimization of deep semantic features by means of non-local perceptual modeling, and the multi-level contextual decoder (MCD) module achieves global relevance aggregation of features using an improved transformer structure. The cascaded splitting encoder (CSE) module can obtain long-range relevance information through channel splitting.
- (2)
- A muti-phase aware framework adapted to different depth features is proposed to learn the dependency information between the channels in a global view, and we propose solutions to achieve better feature representation and utilization for different depth-level features, relying on the rich dependency information obtained from different levels to significantly improve the tracking results.
- (3)
- We achieve the best performance compared with SOTA trackers on several well-known tracking benchmarks containing challenging scenes, including UVA123, UVA20L, DTB70, and LaSOT. Experiments show that the proposed SiamMAN can effectively improve the tracking performance in challenging scenes, such as those with low resolution and scale variation.
2. Related Work
2.1. Siamese Trackers
2.2. Transformer and Fusion Networks
3. Proposed Approach
3.1. Overall Architecture
3.2. Two-Stage Aware Neck
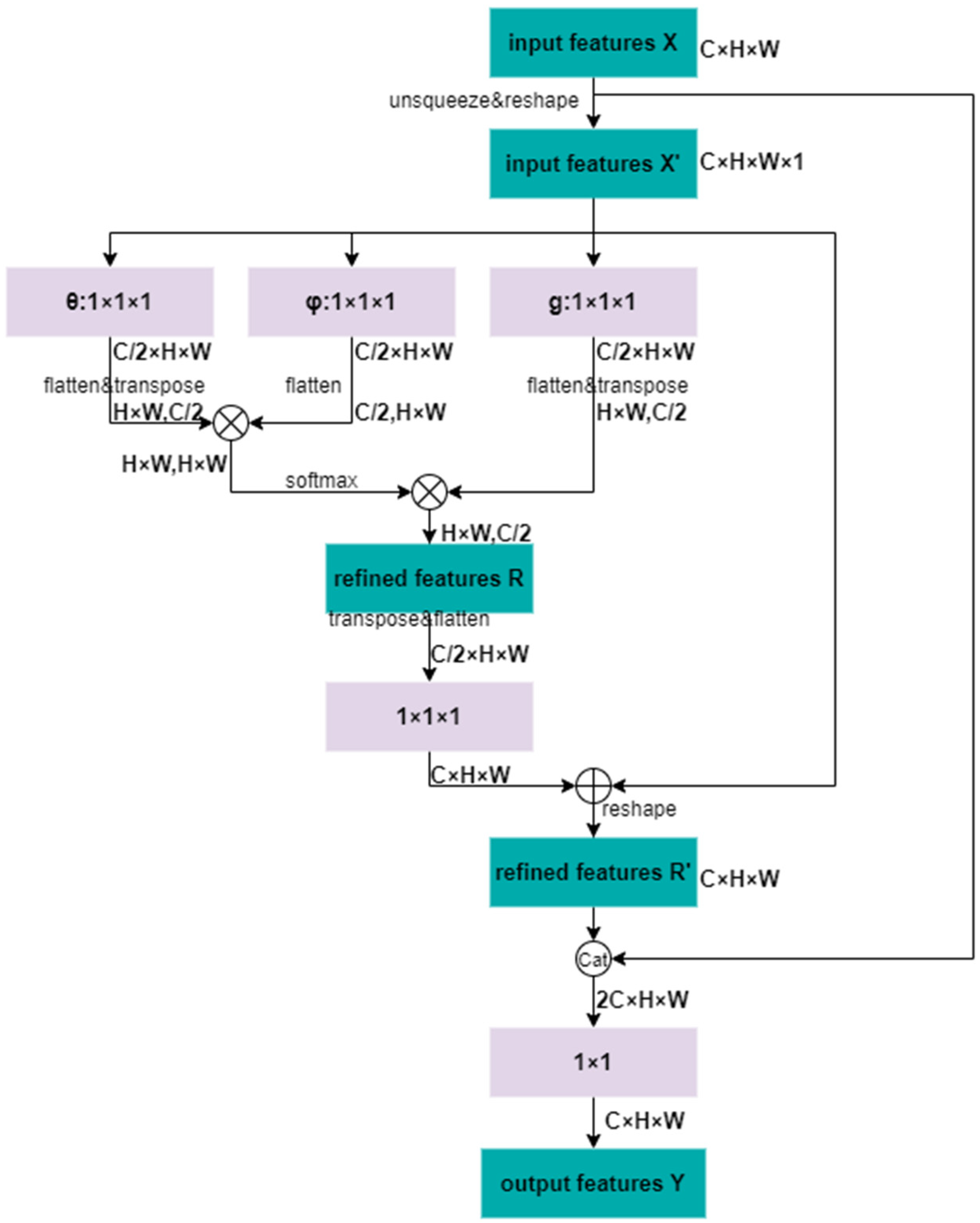
3.3. Responsemap Context Encoder
3.4. Training Loss
4. Experiments and Discussion
4.1. Experiment Setup
4.1.1. Implementation Details
4.1.2. UAV123 Benchmark
4.1.3. UAV20L Benchmark
4.1.4. DTB70 Benchmark
4.1.5. LaSOT Benchmark
4.2. Ablation Studies
4.3. Comparison with State-of-the-Art Methods
4.3.1. UAV123 Benchmark
- (a)
- Overall performance:
- (b)
- Performance under different challenges:
- (c)
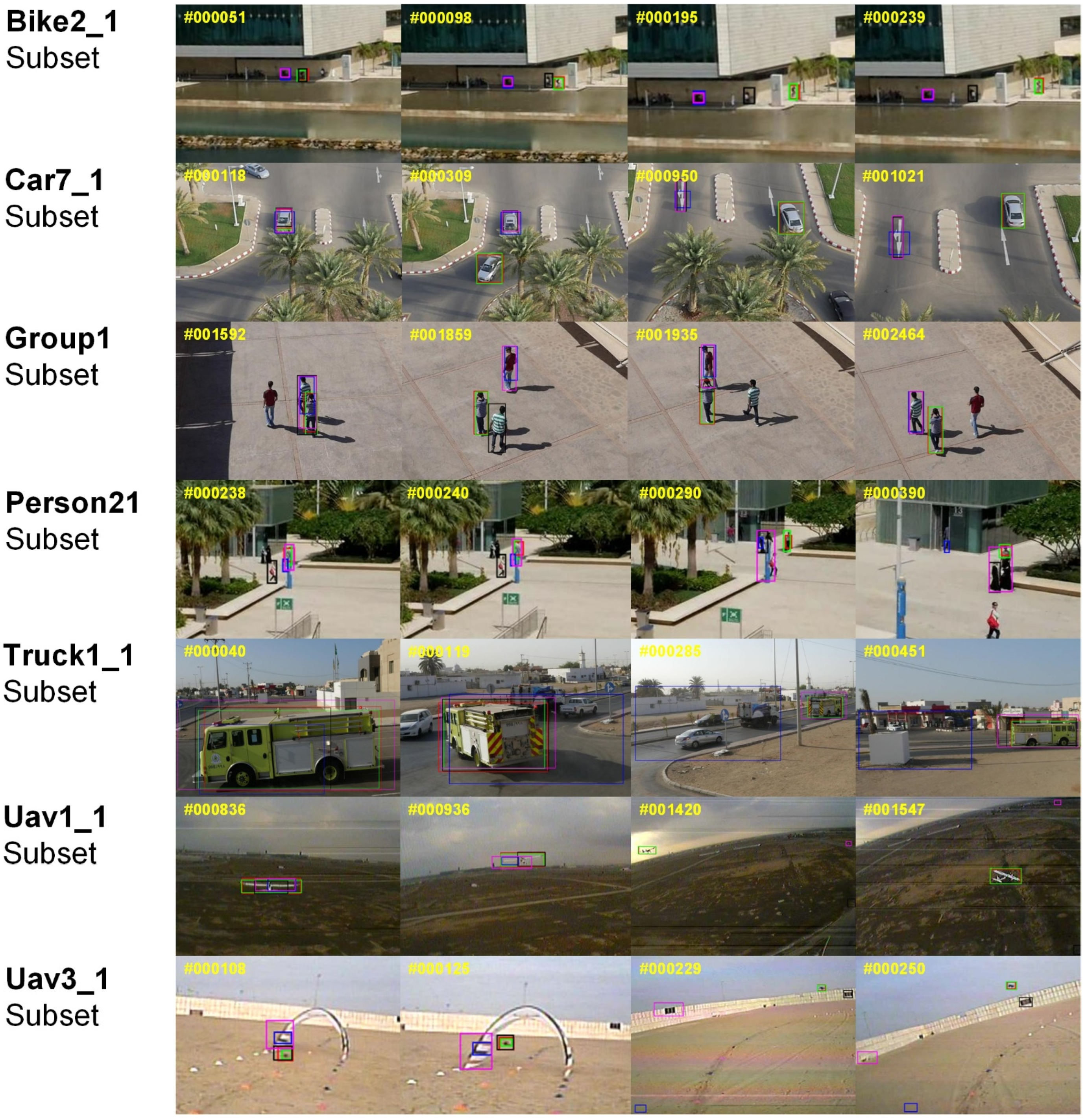
- Qualitative evaluation:
4.3.2. UAV20L Benchmark
4.3.3. DTB70 Benchmark
4.3.4. LaSOT Benchmark
4.4. Heatmap Comparison Experiments
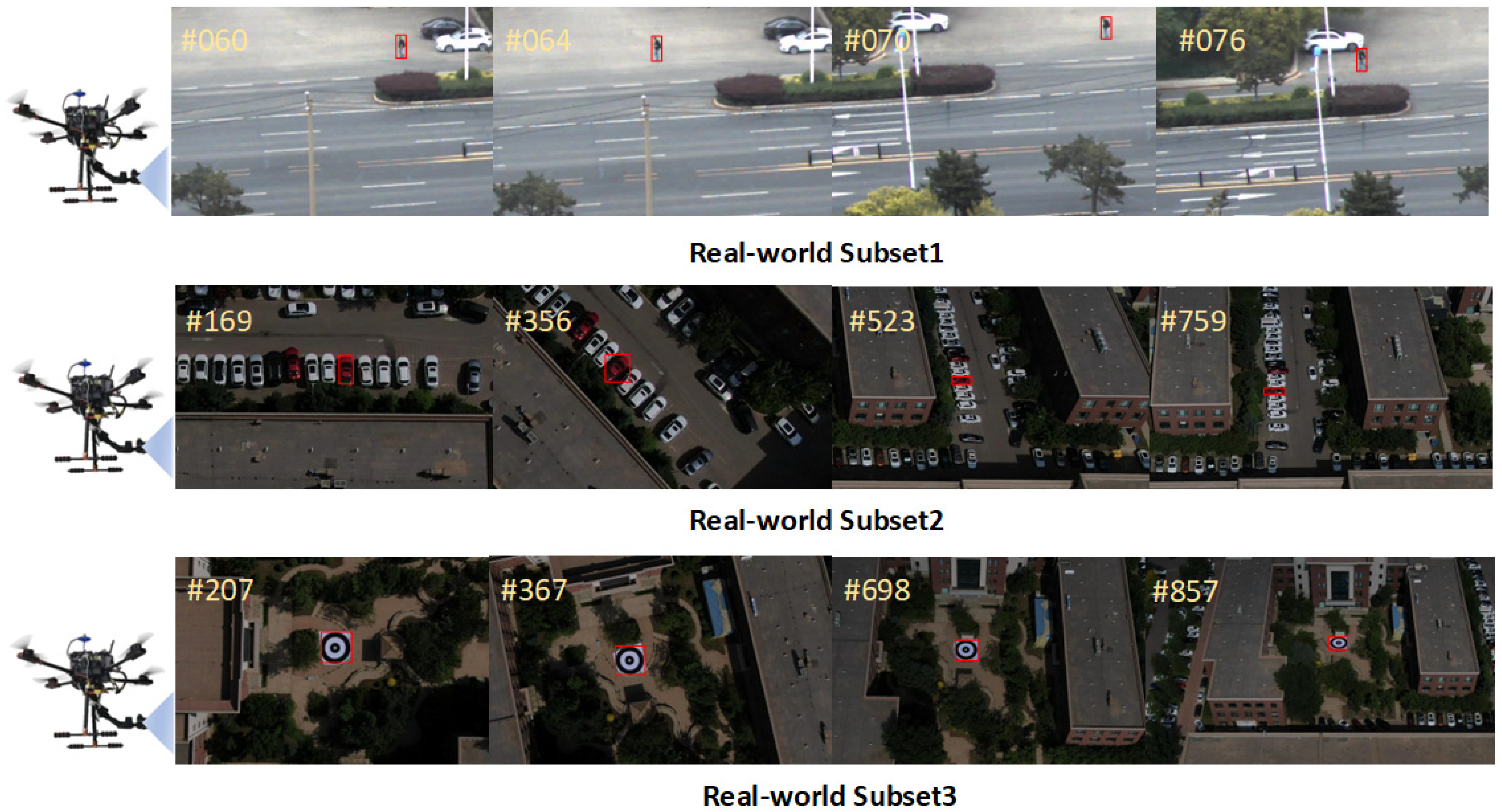
4.5. Real-World Tests
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, J.; Zhang, X.; Huang, Z.; Cheng, X.; Feng, J.; Jiao, L. Bidirectional Multiple Object Tracking Based on Trajectory Criteria in Satellite Videos. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5603714. [Google Scholar] [CrossRef]
- Yan, H.; Xu, X.; Jin, G.; Hou, Q.; Geng, Z.; Wang, L.; Zhang, J.; Zhu, D. Moving Targets Detection for Video SAR Surveillance Using Multilevel Attention Network Based on Shallow Feature Module. IEEE Trans. Geosci. Remote Sens. 2022, 61, 5200518. [Google Scholar] [CrossRef]
- Dai, J.; Pu, W.; Yan, J.; Shi, Q.; Liu, H. Multi-UAV collaborative trajectory optimization for asynchronous 3-D passive multitarget tracking. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5101116. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, C.; Guo, W.; Zhang, T.; Li, W. CFANet: Efficient Detection of UAV Image Based on Cross-layer Feature Aggregation. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5608911. [Google Scholar] [CrossRef]
- Li, B.; Fu, C.; Ding, F.; Ye, J.; Lin, F. All-day object tracking for unmanned aerial vehicle. IEEE Trans. Mob. Comput. 2022, 22, 4515–4529. [Google Scholar] [CrossRef]
- Li, Y.; Ma, L.; Zhong, Z.; Cao, D.; Li, J. TGNet: Geometric graph CNN on 3-D point cloud segmentation. IEEE Trans. Geosci. Remote Sens. 2019, 58, 3588–3600. [Google Scholar] [CrossRef]
- Cao, J.; Song, C.; Song, S.; Xiao, F.; Zhang, X.; Liu, Z.; Ang, M.H., Jr. Robust object tracking algorithm for autonomous vehicles in complex scenes. Remote Sens. 2021, 13, 3234. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, J.; Wang, X.; Zuo, Y.; Liu, C. Global Multi-Scale Optimization and Prediction Head Attentional Siamese Network for Aerial Tracking. Symmetry 2023, 15, 1629. [Google Scholar] [CrossRef]
- Song, W.; Jiao, L.; Liu, F.; Liu, X.; Li, L.; Yang, S.; Hou, B.; Zhang, W. A joint siamese attention-aware network for vehicle object tracking in satellite videos. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5625617. [Google Scholar] [CrossRef]
- Yang, J.; Pan, Z.; Wang, Z.; Lei, B.; Hu, Y. SiamMDM: An Adaptive Fusion Network with Dynamic Template for Real-time Satellite Video Single Object Tracking. IEEE Trans. Geosci. Remote Sens. 2023, 61, 3271645. [Google Scholar] [CrossRef]
- Zeng, H.; Wu, Q.; Jin, Y.; Zheng, H.; Li, M.; Zhao, Y.; Hu, H.; Kong, W. Siam-GCAN: A Siamese graph convolutional attention network for EEG emotion recognition. IEEE Trans. Instrum. Meas. 2022, 71, 4010409. [Google Scholar] [CrossRef]
- Zuo, C.; Qian, J.; Feng, S.; Yin, W.; Li, Y.; Fan, P.; Han, J.; Qian, K.; Chen, Q. Deep learning in optical metrology: A review. Light Sci. Appl. 2022, 11, 39. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Jiang, S.; Song, L.; Peng, P.; Mu, F.; Li, H.; Jiang, P.; Xu, T. Automated optical inspection of FAST’s reflector surface using drones and computer vision. Light: Adv. Manuf. 2023, 4, 3–13. [Google Scholar] [CrossRef]
- Huang, L.; Luo, R.; Liu, X.; Hao, X. Spectral imaging with deep learning. Light Sci. Appl. 2022, 11, 61. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, T.; Singh, M.; Çetintaş, E.; Luo, Y.; Rivenson, Y.; Larin, K.V.; Ozcan, A. Neural network-based image reconstruction in swept-source optical coherence tomography using undersampled spectral data. Light Sci. Appl. 2021, 10, 155. [Google Scholar] [CrossRef]
- Guo, D.; Wang, J.; Cui, Y.; Wang, Z.; Chen, S. SiamCAR: Siamese fully convolutional classification and regression for visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 6269–6277. [Google Scholar]
- Chen, Z.; Zhong, B.; Li, G.; Zhang, S.; Ji, R. Siamese box adaptive network for visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 6668–6677. [Google Scholar]
- Xing, D.; Evangeliou, N.; Tsoukalas, A.; Tzes, A. Siamese transformer pyramid networks for real-time UAV tracking. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2022; pp. 2139–2148. [Google Scholar]
- Cao, Z.; Fu, C.; Ye, J.; Li, B.; Li, Y. Hift: Hierarchical feature transformer for aerial tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 15457–15466. [Google Scholar]
- Su, Y.; Liu, J.; Xu, F.; Zhang, X.; Zuo, Y. A Novel Anti-Drift Visual Object Tracking Algorithm Based on Sparse Response and Adaptive Spatial-Temporal Context-Aware. Remote Sens. 2021, 13, 4672. [Google Scholar] [CrossRef]
- Huang, Y.; Li, X.; Lu, R.; Qi, N. RGB-T object tracking via sparse response-consistency discriminative correlation filters. Infrared Phys. Technol. 2023, 128, 104509. [Google Scholar] [CrossRef]
- Zhang, J.; He, Y.; Wang, S. Learning Adaptive Sparse Spatially-Regularized Correlation Filters for Visual Tracking. IEEE Signal Process. Lett. 2023, 30, 11–15. [Google Scholar] [CrossRef]
- Tao, R.; Gavves, E.; Smeulders, A.W. Siamese instance search for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1420–1429. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H. Fully-convolutional siamese networks for object tracking. In Computer Vision–ECCV 2016 Workshops: Amsterdam, The Netherlands, October 8–10 and 15–16 2016; Proceedings, Part II 14 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 850–865. [Google Scholar]
- Fan, H.; Ling, H. Siamese cascaded region proposal networks for real-time visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7952–7961. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Zhu, Z.; Wang, Q.; Li, B.; Wu, W.; Yan, J.; Hu, W. Distractor-aware siamese networks for visual object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 101–117. [Google Scholar]
- Li, B.; Wu, W.; Wang, Q.; Zhang, F.; Xing, J.; Yan, J. Siamrpn++: Evolution of siamese visual tracking with very deep networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4282–4291. [Google Scholar]
- Xu, Y.; Wang, Z.; Li, Z.; Yuan, Y.; Yu, G. Siamfc++: Towards robust and accurate visual tracking with target estimation guidelines. Proc. AAAI Conf. Artif. Intell. 2020, 34, 12549–12556. [Google Scholar] [CrossRef]
- Fu, C.; Cao, Z.; Li, Y.; Ye, J.; Feng, C. Siamese anchor proposal network for high-speed aerial tracking. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 510–516. [Google Scholar]
- Cao, Z.; Fu, C.; Ye, J.; Li, B.; Li, Y. SiamAPN++: Siamese attentional aggregation network for real-time UAV tracking. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3086–3092. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar]
- Huang, C.; Wang, J.; Wang, S.H.; Zhang, Y.D. Applicable artificial intelligence for brain disease: A survey. Neurocomputing 2022, 504, 223–239. [Google Scholar] [CrossRef]
- Wang, X.; Girshick, R.; Gupta, A.; He, K. Non-local neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7794–7803. [Google Scholar]
- Fu, J.; Liu, J.; Tian, H.; Li, Y.; Bao, Y.; Fang, Z.; Lu, H. Dual attention network for scene segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3146–3154. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Mehta, S.; Rastegari, M. Mobilevit: Light-weight, general-purpose, and mobile-friendly vision transformer. arXiv 2021, arXiv:2110.02178. [Google Scholar]
- Liu, F.; Liu, J.; Chen, Q.; Wang, X.; Liu, C. SiamHAS: Siamese Tracker with Hierarchical Attention Strategy for Aerial Tracking. Micromachines 2023, 14, 893. [Google Scholar] [CrossRef] [PubMed]
- Sosnovik, I.; Moskalev, A.; Smeulders, A.W. Scale equivariance improves siamese tracking. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2021; pp. 2765–2774. [Google Scholar]
- Yao, L.; Fu, C.; Li, S.; Zheng, G.; Ye, J. SGDViT: Saliency-Guided Dynamic Vision Transformer for UAV Tracking. arXiv 2023, arXiv:2303.04378. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Ramanan, D.; Zitnick, C.L.; Dollár, P. Microsoft coco: Common objects in context. In Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Proceedings, Part V 13; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Huang, L.; Zhao, X.; Huang, K. Got-10k: A large high-diversity benchmark for generic object tracking in the wild. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 1562–1577. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Lin, L.; Yang, F.; Chu, P.; Deng, G.; Yu, S.; Bai, H.; Xu, Y.; Liao, C.; Ling, H. Lasot: A high-quality benchmark for large-scale single object tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5374–5383. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. A benchmark and simulator for uav tracking. In Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part I 14; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 445–461. [Google Scholar]
- Li, S.; Yeung, D.Y. Visual object tracking for unmanned aerial vehicles: A benchmark and new motion models. Proc. AAAI Conf. Artif. Intell. 2017, 31, 1–7. [Google Scholar] [CrossRef]
- Hu, W.; Wang, Q.; Zhang, L.; Bertinetto, L.; Torr, P.H. Siammask: A framework for fast online object tracking and segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 3072–3089. [Google Scholar]
- Zhang, Z.; Peng, H.; Fu, J.; Li, B.; Hu, W. Ocean: Object-aware anchor-free tracking. In Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XXI 16; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 771–787. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. Atom: Accurate tracking by overlap maximization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4660–4669. [Google Scholar]
- Zhang, Z.; Peng, H. Deeper and wider siamese networks for real-time visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4591–4600. [Google Scholar]
- Nam, H.; Han, B. Learning multi-domain convolutional neural networks for visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4293–4302. [Google Scholar]
- Yu, Y.; Xiong, Y.; Huang, W.; Scott, M.R. Deformable siamese attention networks for visual object tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 6728–6737. [Google Scholar]
- Danelljan, M.; Bhat, G.; Shahbaz Khan, F.; Felsberg, M. Eco: Efficient convolution operators for tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6638–6646. [Google Scholar]
- Chen, Y.H.; Wang, C.Y.; Yang, C.Y.; Chang, H.S.; Lin, Y.L.; Chuang, Y.Y.; Liao, H.Y.M. NeighborTrack: Improving Single Object Tracking by Bipartite Matching with Neighbor Tracklets. arXiv 2022, arXiv:2211.06663. [Google Scholar]
- Cao, Z.; Huang, Z.; Pan, L.; Zhang, S.; Liu, Z.; Fu, C. TCTrack: Temporal contexts for aerial tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 14798–14808. [Google Scholar]
- Wei, X.; Bai, Y.; Zheng, Y.; Shi, D.; Gong, Y. Autoregressive Visual Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 15–22 June 2023; pp. 9697–9706. [Google Scholar]
- Cui, Y.; Jiang, C.; Wang, L.; Wu, G. Mixformer: End-to-end tracking with iterative mixed attention. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 13608–13618. [Google Scholar]
- Sun, R.; Fang, L.; Gao, X.; Gao, J. A novel target-aware dual matching and compensatory segmentation tracker for aerial videos. IEEE Trans. Instrum. Meas. 2021, 70, 3109722. [Google Scholar] [CrossRef]
- Hu, Q.; Guo, Y.; Lin, Z.; An, W.; Cheng, H. Object tracking using multiple features and adaptive model updating. IEEE Trans. Instrum. Meas. 2017, 66, 2882–2897. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NO | RCE | CSE | MCD | UAV123 | UAV20L | ||
|---|---|---|---|---|---|---|---|
| Pre (%) | Succ (%) | Pre (%) | Succ (%) | ||||
| 1 | 79.2 | 61.5 | 70.4 | 55.2 | |||
| 2 | ✘ | 80.5 | 62.1 | 71.5 | 55.5 | ||
| 3 | ✘ | 80.4 | 62.3 | 71.9 | 56.2 | ||
| 4 | ✘ | 81.7 | 62.9 | 73.5 | 56.7 | ||
| 5 | ✘ | ✘ | ✘ | 83.0 | 63.9 | 75.1 | 57.8 |
| Metrics | SiamMAN | SiamBAN | SiamHAS | Ocean | SiamCAR | SiamTPN | HiFT | SiamFC ++ | Neighbor Track | ARTrack | Mix-Former |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Succ (%) | 63.9 | 63.1 | 62.7 | 62.1 | 61.4 | 59.3 | 58.9 | 54.9 | - | - | - |
| Pre (%) | 83.0 | 82.8 | 82.0 | 82.3 | 80.4 | 79.0 | 78.7 | 76.5 | - | - | - |
| AUC (%) | 64.6 | 62.5 | 63.1 | 57.4 | 60.8 | - | - | - | 72.5 | 71.2 | 70.4 |
| Hardware for FPS Test | RTX3080 | RTX3080 | RTX3080 | RTX3080 | RTX3080 | RTX3080 | RTX3080 | GTX2080Ti | - | RTX 3090 | GTX1080Ti |
| FPS | 43 | 45 | 46 | 56 | 49 | 108 | 135 | 70 | - | 45 | 25 |
| Video | Attribute | SiamMAN | SiamBAN | SiamHAS | Ocean | SiamCAR | SiamTPN | HiFT | TMCS | SiamFC++ |
|---|---|---|---|---|---|---|---|---|---|---|
| Bike3 | LR POC | 66.5 | 14.1 | 44.2 | 55.8 | 16.3 | 50.7 | 18.0 | 17.8 | 17.6 |
| Boat5 | VC | 88.6 | 88.5 | 85.8 | 88.5 | 87.4 | 87.7 | 81.6 | 38.7 | 89.0 |
| Building5 | CM | 78.8 | 42.3 | 54.7 | 59.6 | 71.4 | 81.6 | 81.9 | 99.8 | 89.1 |
| Car15 | LR POC SOB | 69.9 | 68.0 | 65.7 | 5.0 | 63.9 | 3.5 | 5.1 | 49.1 | 39.9 |
| Person21 | LR POC VC SOB | 49.1 | 41.4 | 26.3 | 37.4 | 33.6 | 22.8 | 26.2 | 28.7 | 19.2 |
| Truck2 | LR POC | 32.7 | 31.5 | 78.2 | 79.3 | 34.2 | 19.9 | 31.8 | 88.5 | 65.7 |
| Uav4 | LR SOB | 23.6 | 6.4 | 8.4 | 49.7 | 7.7 | 2.5 | 8.6 | 8.9 | 8.1 |
| Wakeboard2 | VC CM | 73.2 | 75.3 | 74.7 | 74.5 | 73.5 | 73.7 | 69.8 | 26.1 | 18.8 |
| Car1_s | POC OV VC CM | 74.1 | 30.3 | 33.0 | 35.5 | 39.5 | 37.9 | 30.8 | 23.2 | 26.7 |
| Person3_s | POC OV CM | 79.4 | 79.3 | 77.7 | 78.3 | 73.2 | 80.4 | 72.1 | 48.3 | 39.9 |
| Video | Attribute | SiamMAN | SiamBAN | SiamHAS | Ocean | SiamCAR | SiamTPN | HiFT | TMCS | SiamFC++ |
|---|---|---|---|---|---|---|---|---|---|---|
| Bike3 | LR POC | 94.6 | 34.7 | 91.7 | 92.2 | 34.5 | 74.4 | 49.1 | 65.5 | 17.6 |
| Boat5 | VC | 92.6 | 93.8 | 90.6 | 92.6 | 92.1 | 93.2 | 90.1 | 37.6 | 89.0 |
| Building5 | CM | 92.4 | 87.0 | 92.3 | 91.2 | 93.4 | 92.7 | 93.8 | 99.8 | 89.1 |
| Car15 | LR POC SOB | 96.7 | 96.3 | 96.7 | 11.2 | 96.5 | 8.0 | 11.1 | 99.7 | 39.9 |
| Person21 | LR POC VC SOB | 85.9 | 73.2 | 50.1 | 66.6 | 61.3 | 39.3 | 63.3 | 73.9 | 19.2 |
| Truck2 | LR POC | 41.4 | 42.2 | 94.4 | 93.7 | 41.4 | 32.3 | 41.1 | 99.7 | 65.7 |
| Uav4 | LR SOB | 42.7 | 19.9 | 20.2 | 76.8 | 20.2 | 5.3 | 21.0 | 19.8 | 8.1 |
| Wakeboard2 | VC CM | 87.7 | 88.7 | 89.0 | 89.5 | 89.2 | 90.4 | 88.3 | 64.6 | 18.8 |
| Car1_s | POC OV VC CM | 91.7 | 36.5 | 40.8 | 42.3 | 48.2 | 42.6 | 41.5 | 21.0 | 26.7 |
| Person3_s | POC OV CM | 80.7 | 79.7 | 78.2 | 82.0 | 71.6 | 80.3 | 75.9 | 55.8 | 39.9 |
| NO | Metrics | SiamMAN | SiamHAS | Siam APN++ | HiFT | SiamAPN | SiamFC++ | SiamRPN | TCTrack | SGDViT | CFIT |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Succ (%) | 57.8 | 57.3 | 56.0 | 55.3 | 53.9 | 53.3 | 52.8 | 51.1 | 50.5 | 35.7 |
| 2 | Pre (%) | 75.1 | 74.5 | 73.6 | 73.6 | 72.1 | 69.5 | 69.6 | 68.6 | 67.3 | 49.2 |
| NO | Metrics | SiamMAN | SiamAttn | SGDViT | TCTrack | HiFT | SiamAPN++ | SE-SiamFC | Ocean |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Succ (%) | 64.9 | 64.5 | 63.0 | 62.2 | 59.4 | 59.4 | 48.7 | 45.6 |
| 2 | Pre (%) | 83.6 | 82.6 | 80.6 | 81.3 | 82.0 | 79.0 | 73.5 | 69.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Wang, X.; Chen, Q.; Liu, J.; Liu, C. SiamMAN: Siamese Multi-Phase Aware Network for Real-Time Unmanned Aerial Vehicle Tracking. Drones 2023, 7, 707. https://doi.org/10.3390/drones7120707
Liu F, Wang X, Chen Q, Liu J, Liu C. SiamMAN: Siamese Multi-Phase Aware Network for Real-Time Unmanned Aerial Vehicle Tracking. Drones. 2023; 7(12):707. https://doi.org/10.3390/drones7120707
Chicago/Turabian StyleLiu, Faxue, Xuan Wang, Qiqi Chen, Jinghong Liu, and Chenglong Liu. 2023. "SiamMAN: Siamese Multi-Phase Aware Network for Real-Time Unmanned Aerial Vehicle Tracking" Drones 7, no. 12: 707. https://doi.org/10.3390/drones7120707
APA StyleLiu, F., Wang, X., Chen, Q., Liu, J., & Liu, C. (2023). SiamMAN: Siamese Multi-Phase Aware Network for Real-Time Unmanned Aerial Vehicle Tracking. Drones, 7(12), 707. https://doi.org/10.3390/drones7120707