
QuickNav: An Effective Collision Avoidance and Path-Planning Algorithm for UAS

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
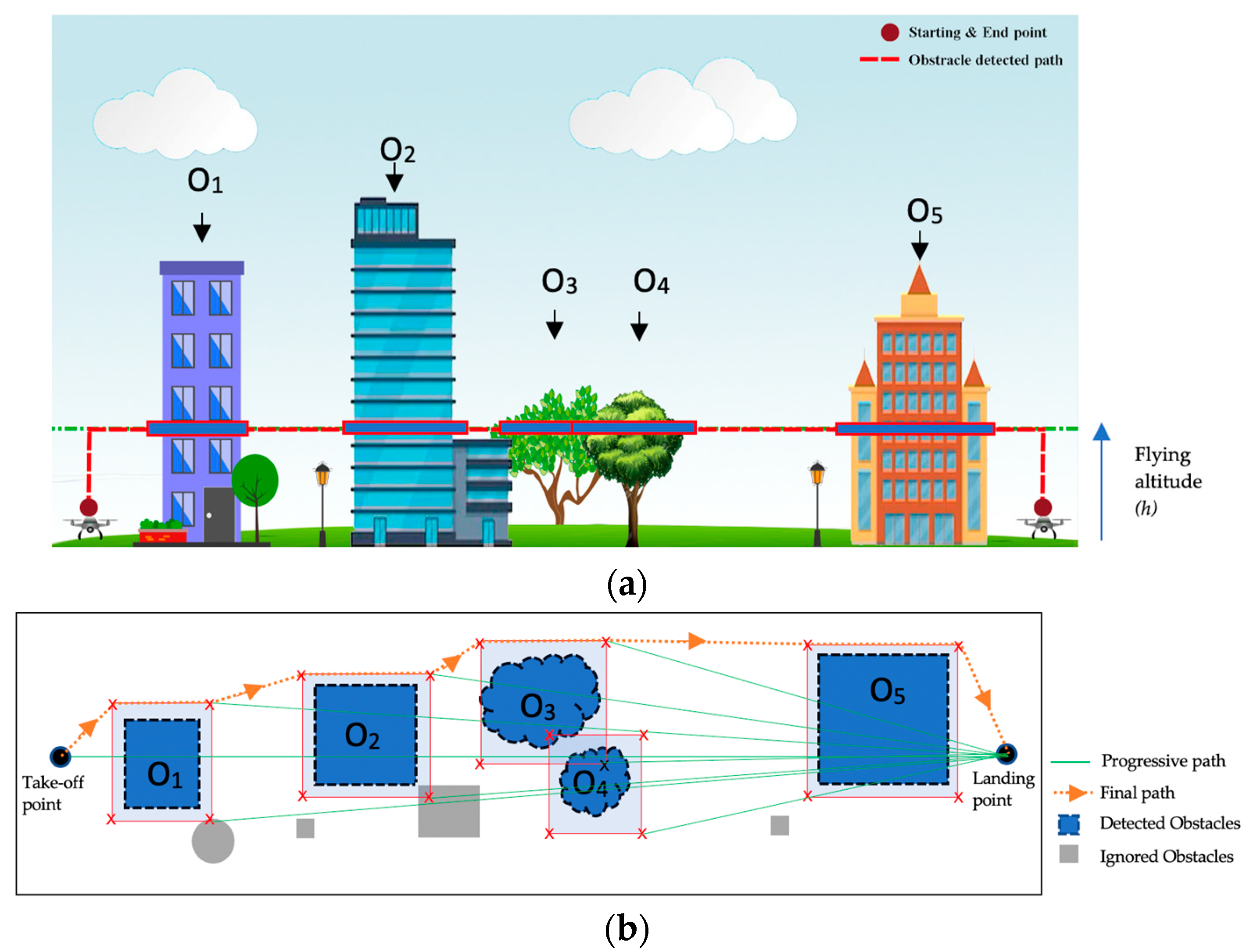
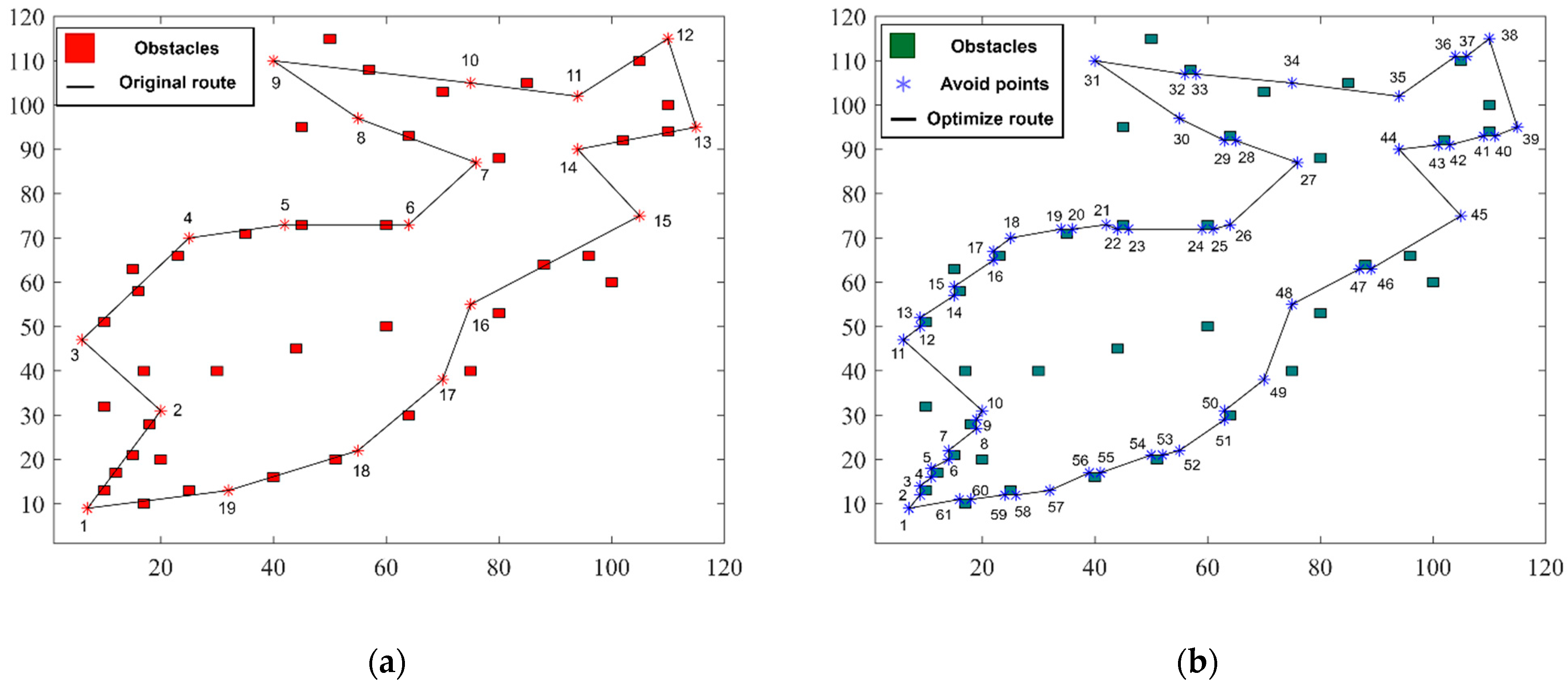
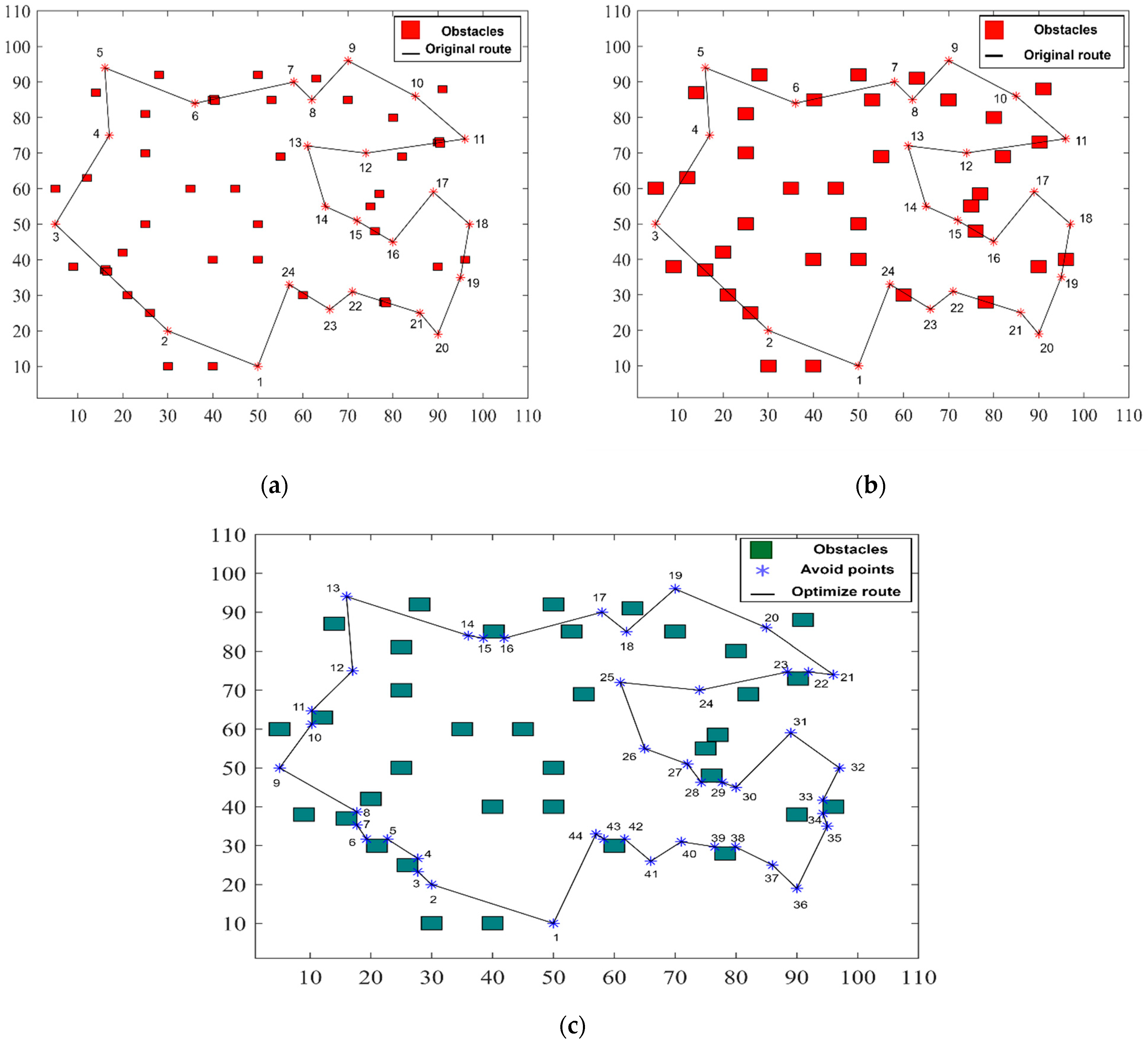
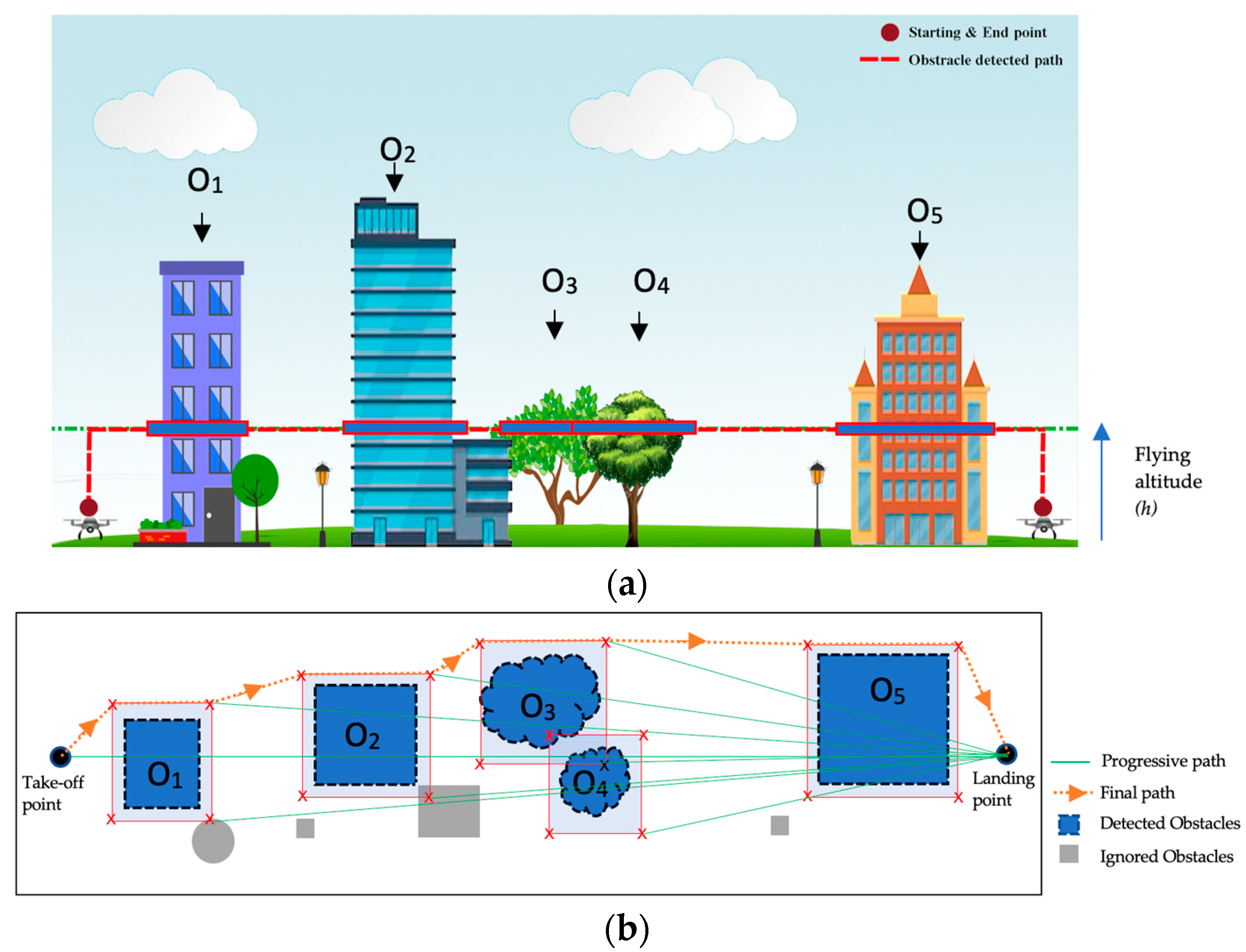
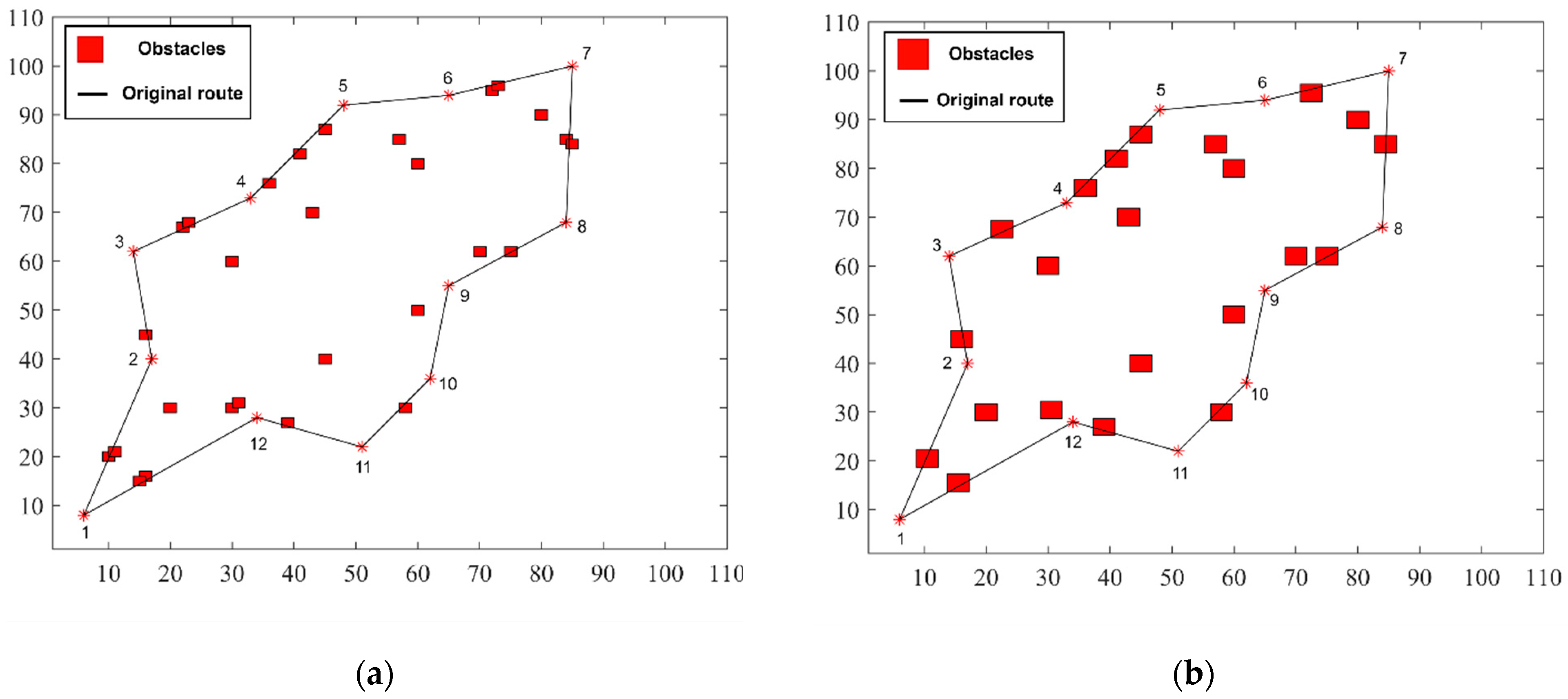
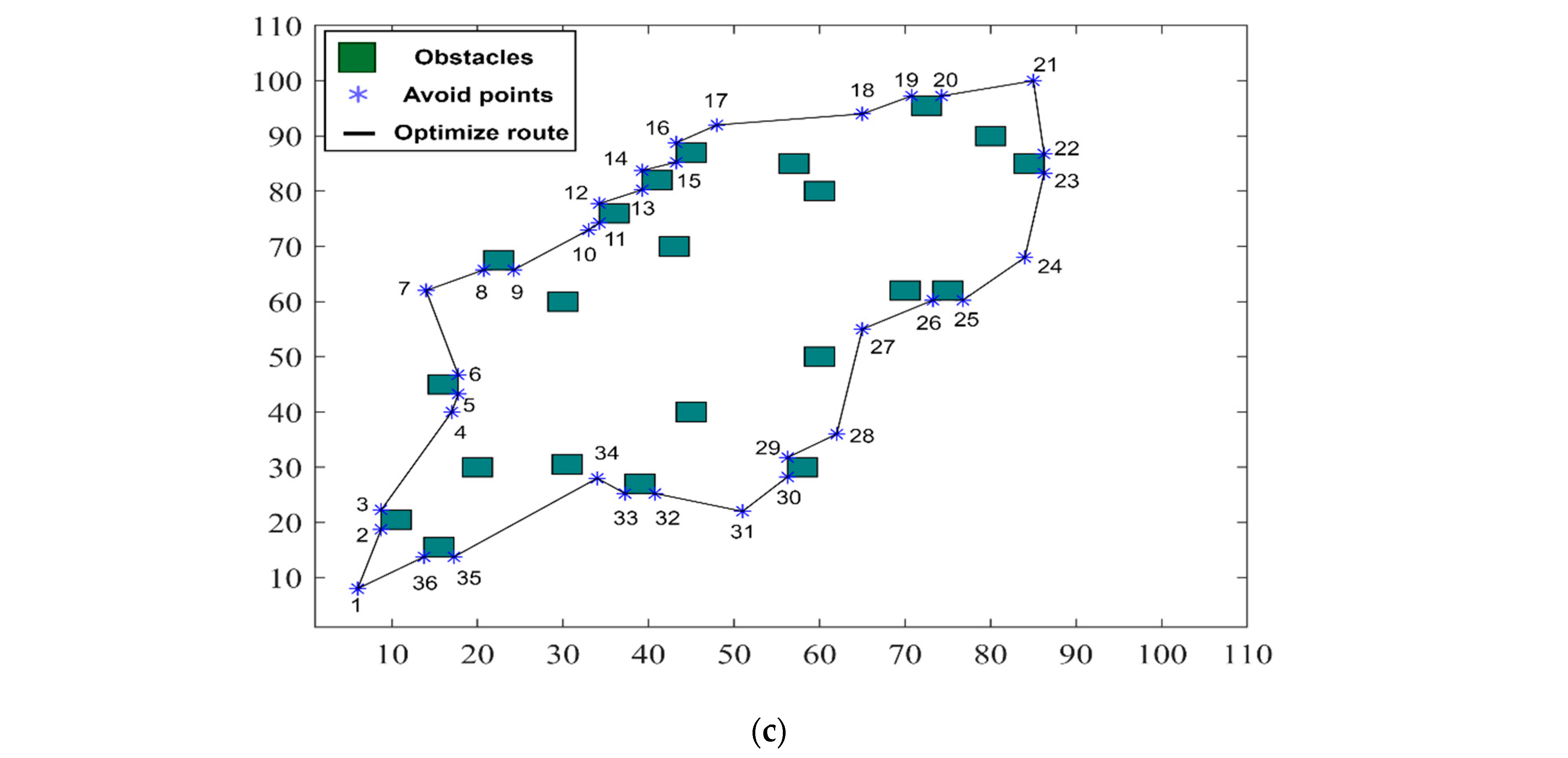
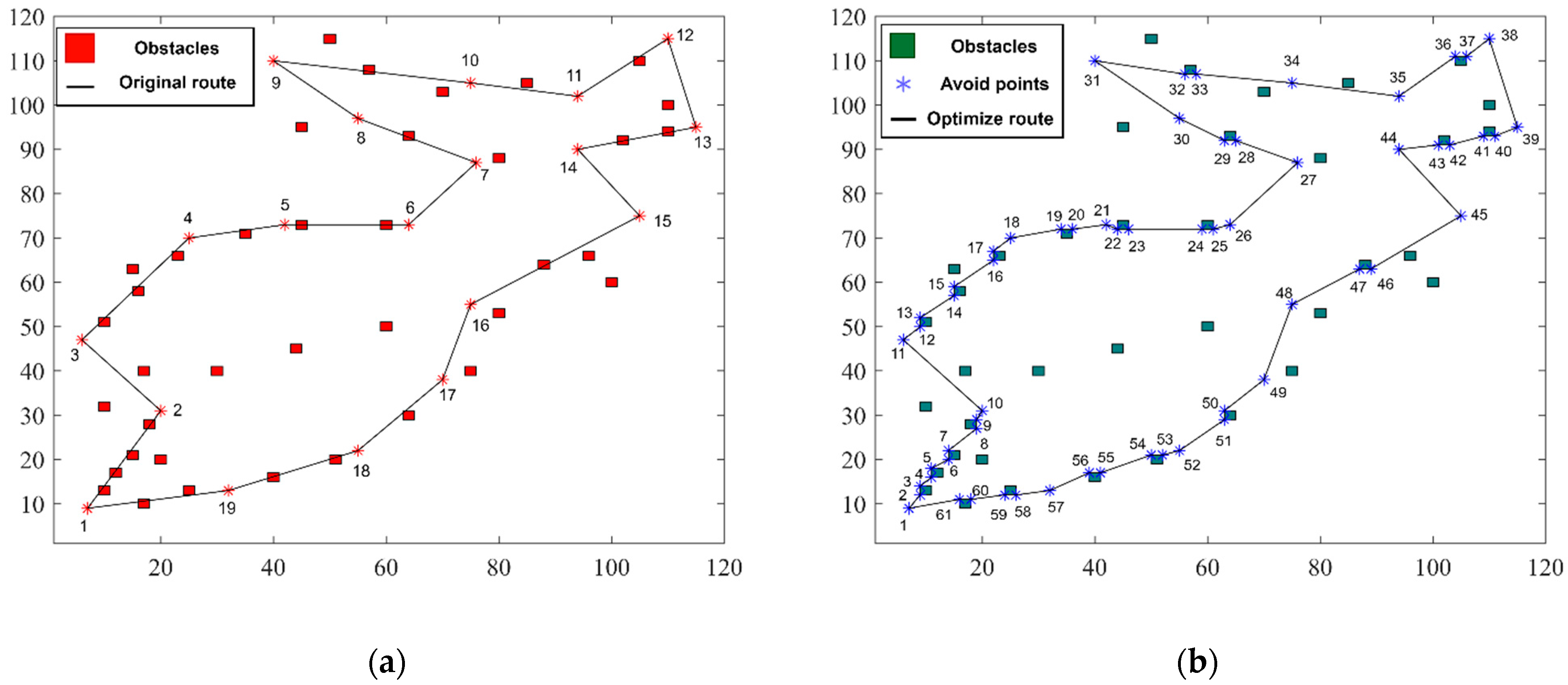
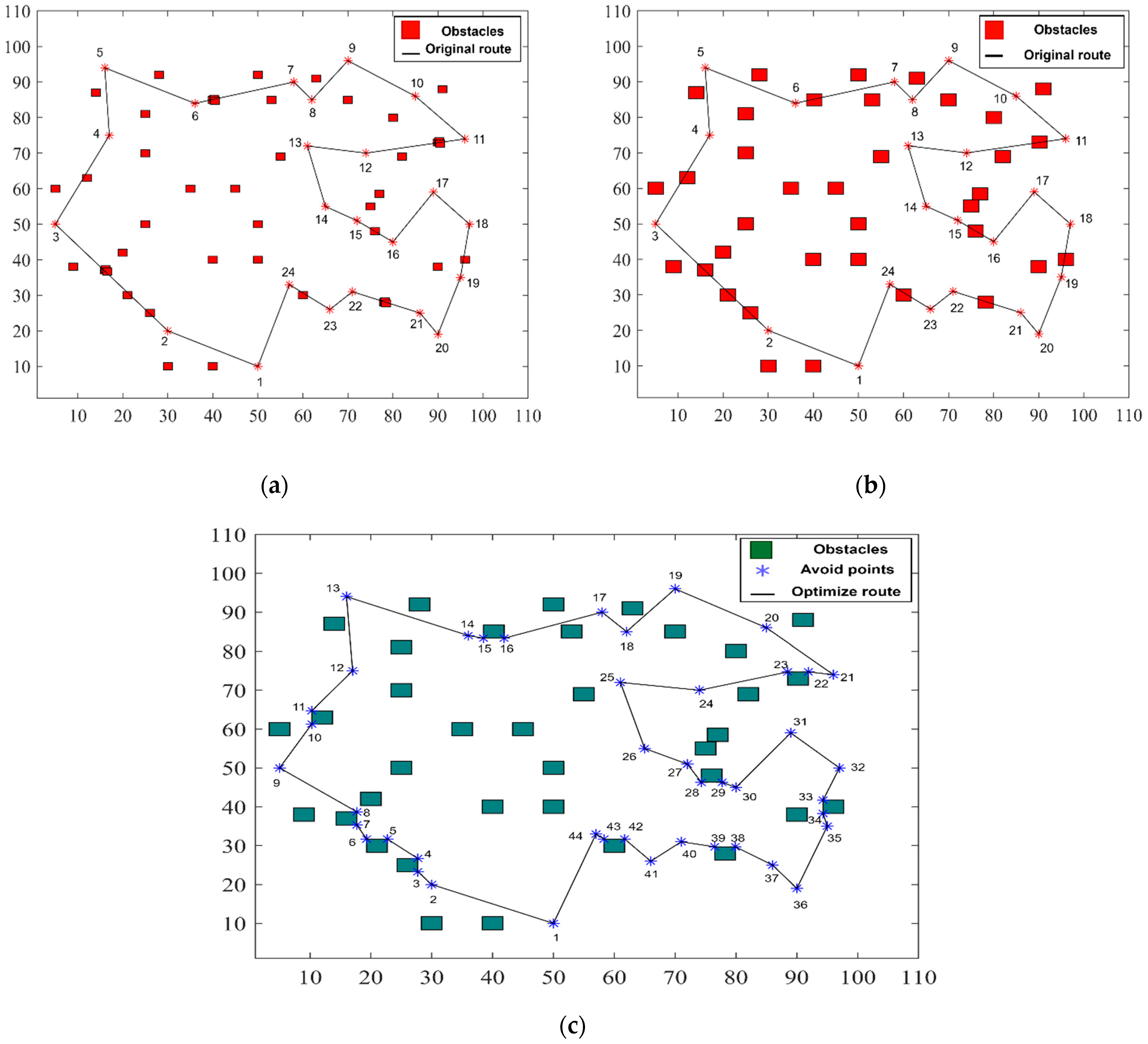
2.1. Case Studies
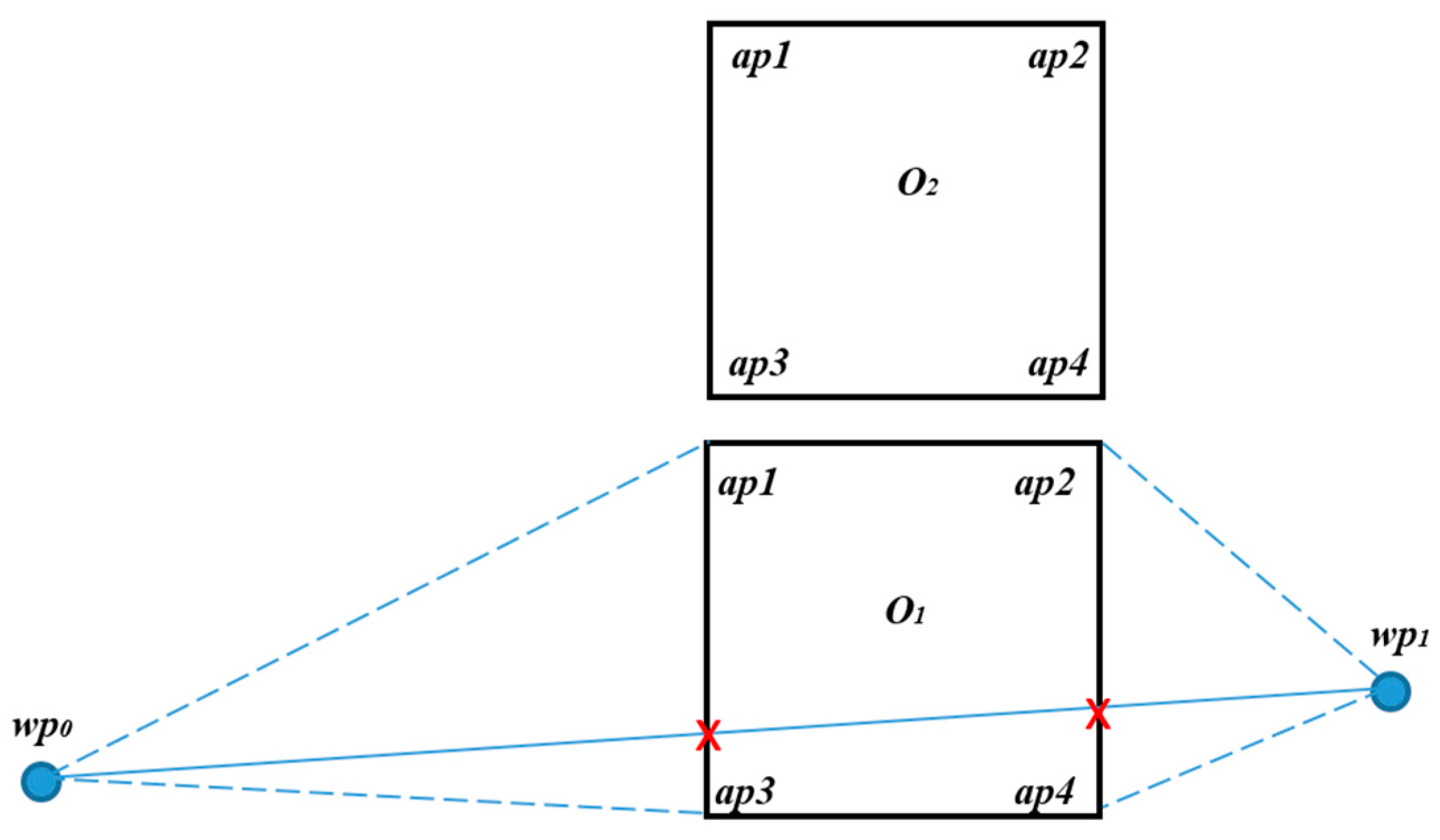
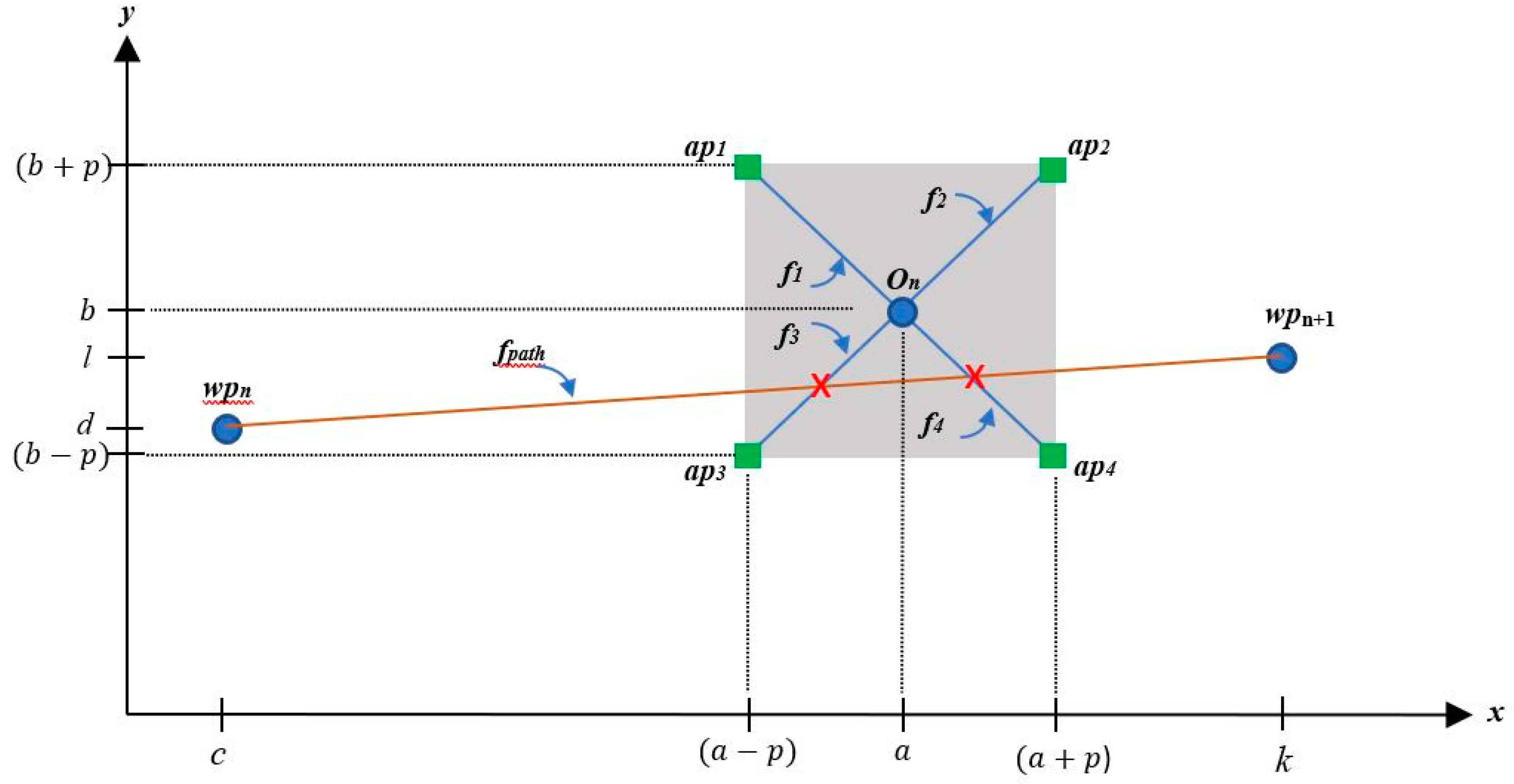
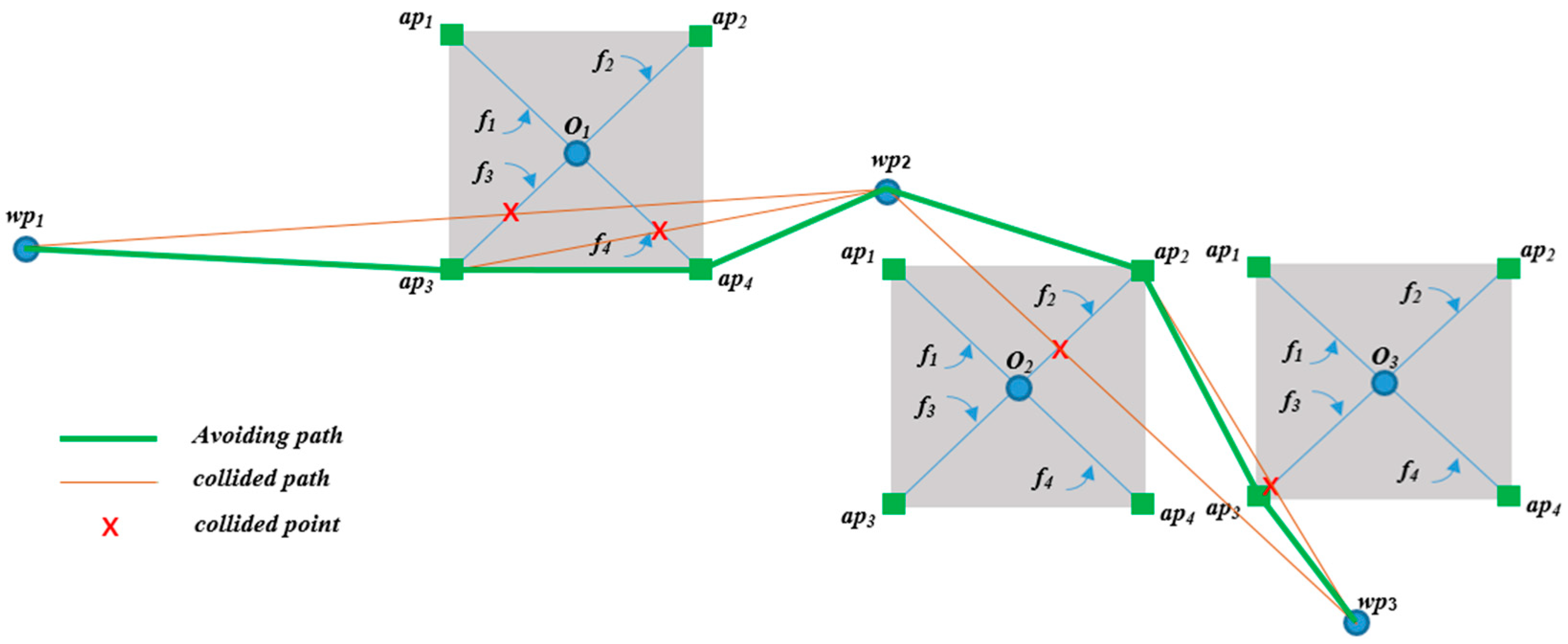
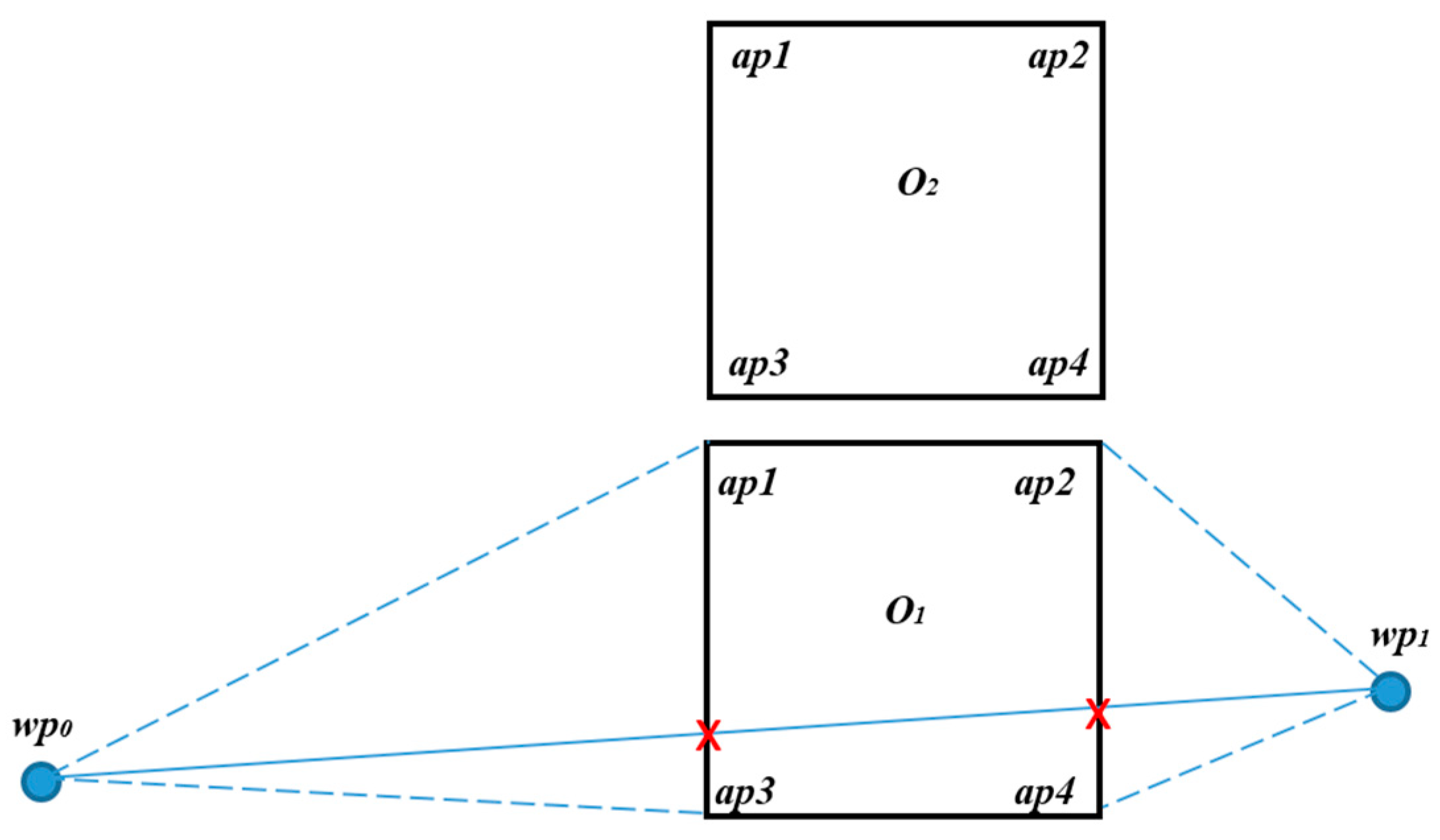
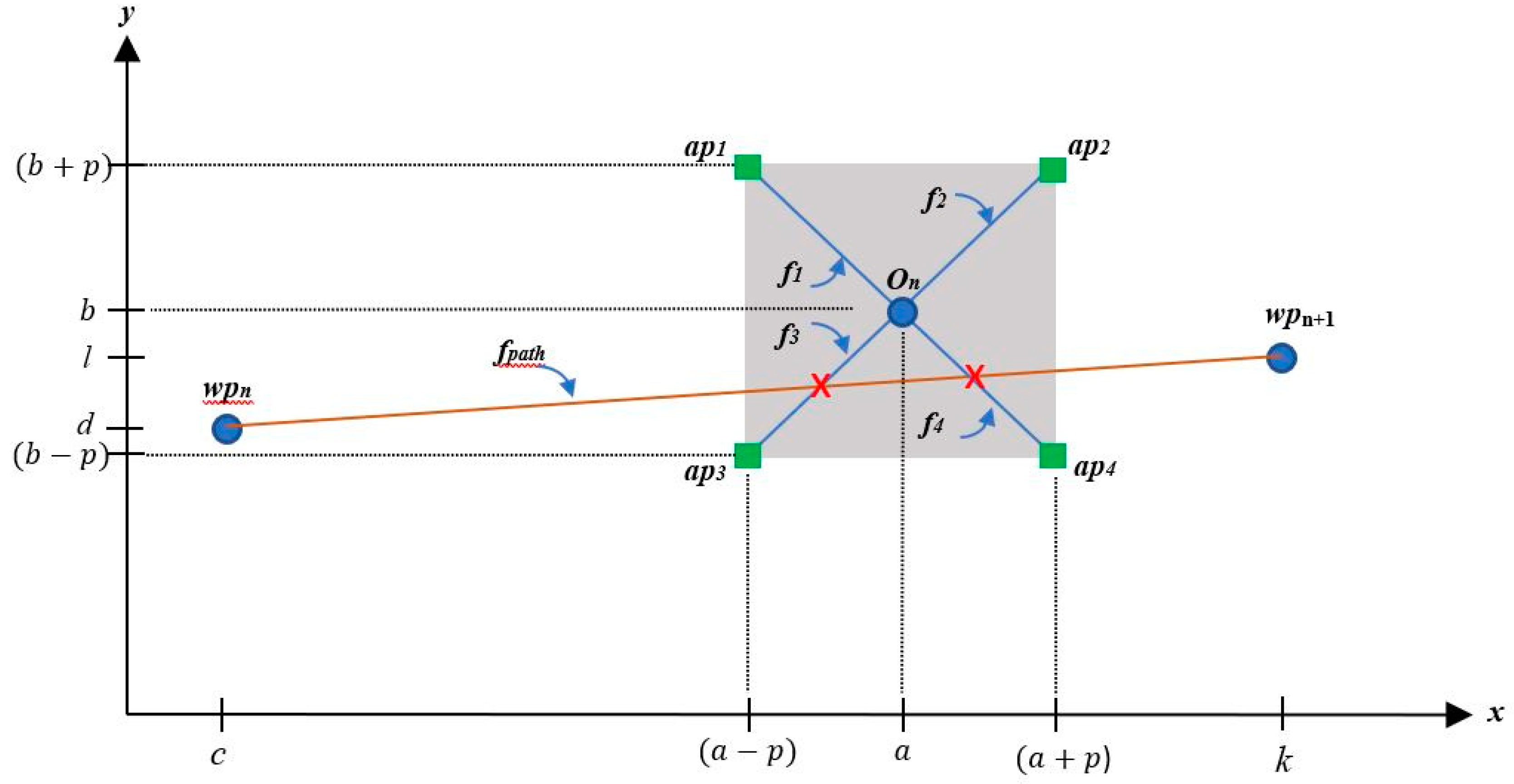
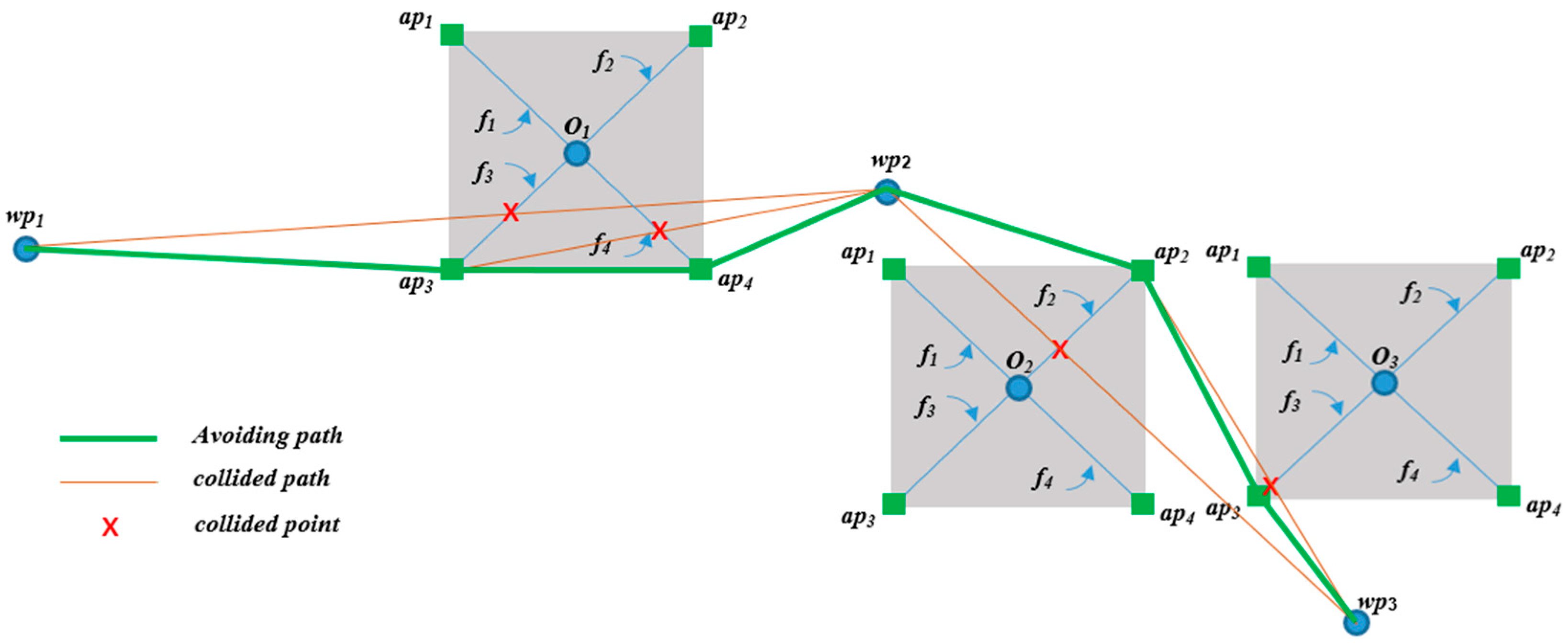
2.2. QuickNav Approach and Algorithm
| Algorithm 1: QuickNav algorithm pseudo code |
| Initialize input obstacle coordinate, 0n (a, b), where n = 1,2,3… input safe flying perimeter p, input waypoints wpn (c, d), where n = 1,2,3… define starting waypoint = [wp1] define destination waypoint = [wp2] define starting path = [ fpath ] (between starting waypoint and destination waypoint) formulate four functions for every obstacles, On { f1, f2, f3, f4 } define current path = starting path define current waypoint = starting waypoint Main while collision detected! Check if <current path intercepts f1 > update {next waypoint candidate} = ap1 else if <current path intercepts f2 > update {next waypoint candidate} = ap2 else if <current path intercepts f3 > update {next waypoint candidate} = ap3 else if <current path intercepts f4 > update {next waypoint candidate} = ap4 break; find the nearest distance between {next waypoint candidate} and [current waypoint] update [nearest {candidate next waypoint}] = [current waypoint] end if while no collision detected! do update [current waypoint] = [destination waypoint] //move to the next path update [destination waypoint] = destination waypoint ++ update avoiding waypoint = {starting waypoint, … end waypoints} end |
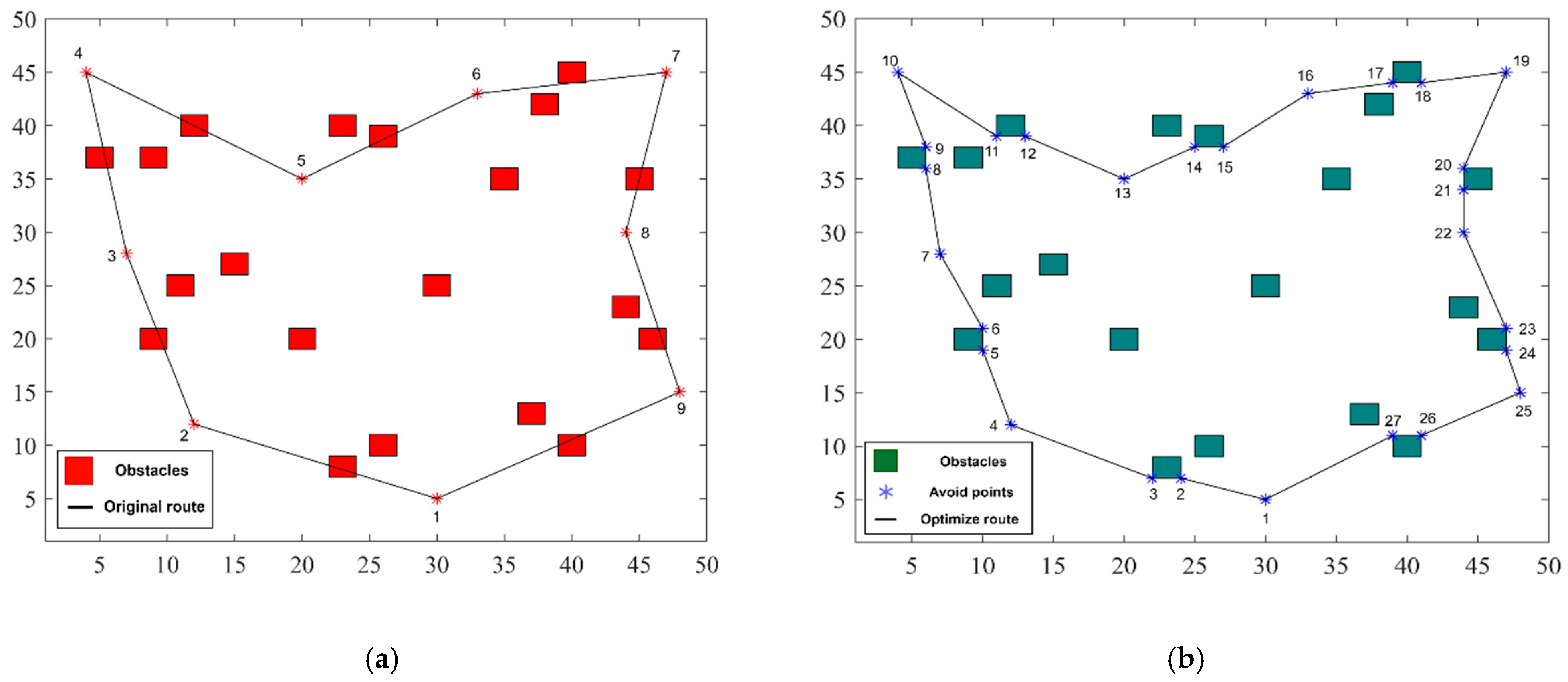
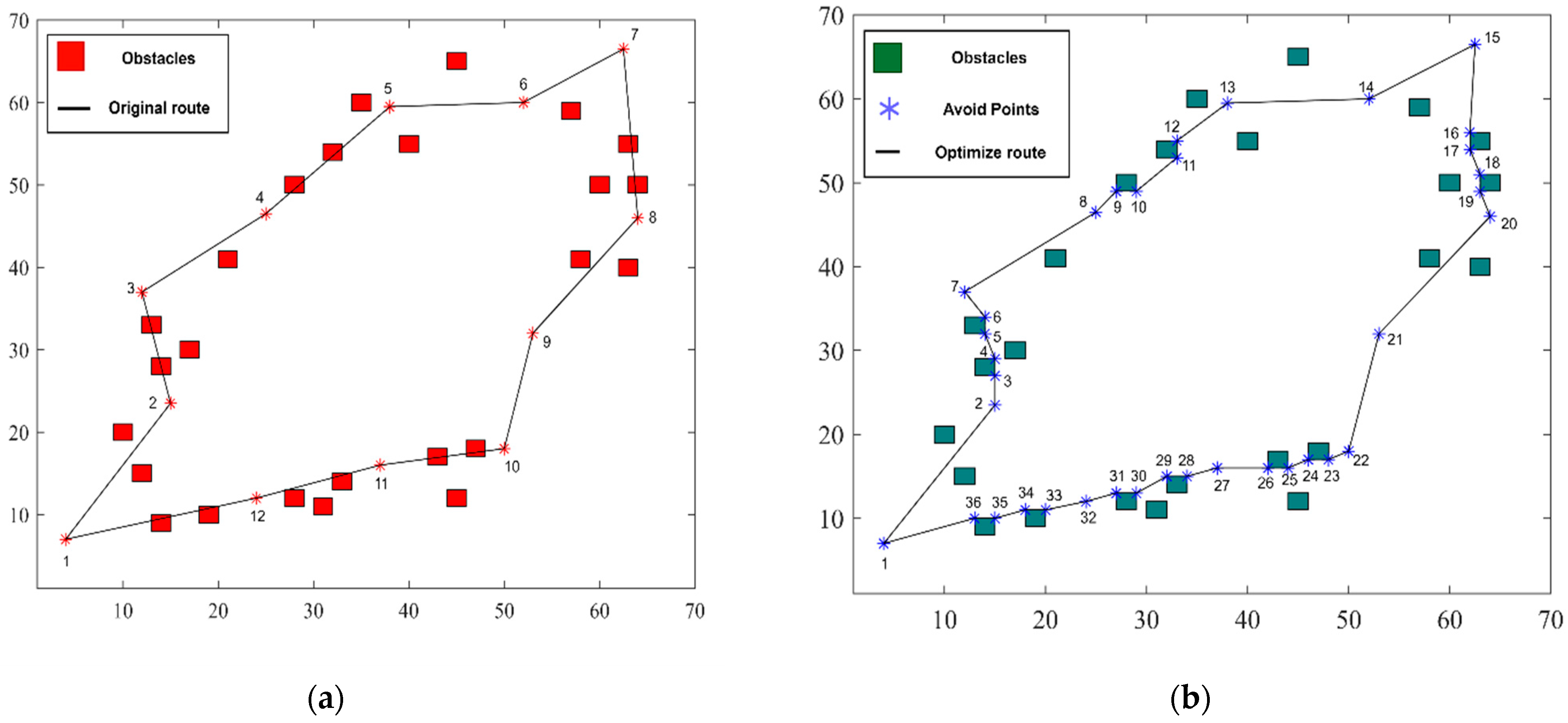
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, W.; Chu, H.; Zhang, M.; Sun, T.; Guo, L. Flocking control of fixed-wing UAVs with cooperative obstacle avoidance capability. IEEE Access 2019, 7, 17798–17808. [Google Scholar] [CrossRef]
- Bashir, N.; Boudjit, S.; Dauphin, G.; Zeadally, S. An obstacle avoidance approach for UAV path planning. Simul. Model. Pract. Theory 2023, 129, 102815. [Google Scholar] [CrossRef]
- Debnath, D.; Hawary, A. Adapting travelling salesmen problem for real-time UAS path planning using genetic algorithm. In Intelligent Manufacturing and Mechatronics: Proceedings of SympoSIMM 2020; Springer: Perlis, Malaysia, 2021; pp. 151–163. [Google Scholar]
- Tu, G.-T.; Juang, J.-G. UAV Path Planning and Obstacle Avoidance Based on Reinforcement Learning in 3D Environments. Actuators 2023, 12, 57. [Google Scholar] [CrossRef]
- Lin, Z.; Castano, L.; Mortimer, E.; Xu, H. Fast 3D collision avoidance algorithm for fixed wing UAS. J. Intell. Robot. Syst. 2020, 97, 577–604. [Google Scholar] [CrossRef]
- Yu, Y.; Tingting, W.; Long, C.; Weiwei, Z. Stereo vision based obstacle avoidance strategy for quadcopter UAV. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 490–494. [Google Scholar]
- Du, H.; Wang, Z.; Zhang, X. EF-TTOA: Development of a UAV Path Planner and Obstacle Avoidance Control Framework for Static and Moving Obstacles. Drones 2023, 7, 359. [Google Scholar] [CrossRef]
- Mittal, P.; Singh, R.; Sharma, A. Deep learning-based object detection in low-altitude UAV datasets: A survey. Image Vis. Comput. 2020, 104, 104046. [Google Scholar] [CrossRef]
- Stulgis, A.; Ambroziak, L.; Kondratiuk, M. Obstacle detection and avoidance system for unmanned multirotors. In Proceedings of the 2018 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; pp. 455–460. [Google Scholar]
- Lee, M.H.; Moon, J. Deep reinforcement learning-based model-free path planning and collision avoidance for UAVs: A soft actor–critic with hindsight experience replay approach. ICT Express 2023, 9, 403–408. [Google Scholar] [CrossRef]
- Sandino, J.; Maire, F.; Caccetta, P.; Sanderson, C.; Gonzalez, F. Drone-based autonomous motion planning system for outdoor environments under object detection uncertainty. Remote Sens. 2021, 13, 4481. [Google Scholar] [CrossRef]
- Komol, M.M.R.; Elhenawy, M.; Masoud, M.; Rakotonirainy, A.; Glaser, S.; Wood, M.; Alderson, D. Deep RNN Based Prediction of Driver’s Intended Movements at Intersection Using Cooperative Awareness Messages. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6902–6921. [Google Scholar] [CrossRef]
- Hawary, A.; Razak, N. Real-time Collision Avoidance and Path Optimizer for Semi-autonomous UAVs. IOP Conf. Ser. Mater. Sci. Eng. 2018, 370, 012043. [Google Scholar] [CrossRef]
- Al-Kaff, A.; García, F.; Martín, D.; De La Escalera, A.; Armingol, J.M. Obstacle detection and avoidance system based on monocular camera and size expansion algorithm for UAVs. Sensors 2017, 17, 1061. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Zhang, P.; Kong, X. Collision avoidance in fixed-wing UAV formation flight based on a consensus control algorithm. IEEE Access 2018, 6, 43672–43682. [Google Scholar] [CrossRef]
- Pasha, J.; Elmi, Z.; Purkayastha, S.; Fathollahi-Fard, A.M.; Ge, Y.-E.; Lau, Y.-Y.; Dulebenets, M.A. The drone scheduling problem: A systematic state-of-the-art review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14224–14247. [Google Scholar] [CrossRef]
- Ahmadian, N.; Lim, G.J.; Torabbeigi, M.; Kim, S.J. Collision-free multi-UAV flight scheduling for power network damage assessment. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 794–798. [Google Scholar]
- Ramli, M.F.B.; Legowo, A.; Shamsudin, S.S. Object detection technique for small unmanned aerial vehicle. IOP Conf. Ser. Mater. Sci. Eng. 2017, 260, 012040. [Google Scholar] [CrossRef]
- Khan, M.; Hassan, S.; Ahmed, S.I.; Iqbal, J. Stereovision-based real-time obstacle detection scheme for unmanned ground vehicle with steering wheel drive mechanism. In Proceedings of the 2017 International Conference on Communication, Computing and Digital Systems (C-CODE), Islamabad, Pakistan, 8–9 March 2017; pp. 380–385. [Google Scholar]
- Zheng, L.; Zhang, P.; Tan, J.; Li, F. The obstacle detection method of uav based on 2D lidar. IEEE Access 2019, 7, 163437–163448. [Google Scholar] [CrossRef]
- Bareiss, D.; Bourne, J.R.; Leang, K.K. On-board model-based automatic collision avoidance: Application in remotely-piloted unmanned aerial vehicles. Auton. Robot. 2017, 41, 1539–1554. [Google Scholar] [CrossRef]
- Wan, Y.; Tang, J.; Lao, S. Research on the collision avoidance algorithm for fixed-wing UAVs based on maneuver coordination and planned trajectories prediction. Appl. Sci. 2019, 9, 798. [Google Scholar] [CrossRef]
- Krishnan, P.; Manimala, K. Implementation of optimized dynamic trajectory modification algorithm to avoid obstacles for secure navigation of UAV. Appl. Soft Comput. 2020, 90, 106168. [Google Scholar] [CrossRef]
- Patle, B.; Parhi, D.; Jagadeesh, A.; Kashyap, S.K. Matrix-Binary Codes based Genetic Algorithm for path planning of mobile robot. Comput. Electr. Eng. 2018, 67, 708–728. [Google Scholar] [CrossRef]
- Patle, B.; Pandey, A.; Jagadeesh, A.; Parhi, D.R. Path planning in uncertain environment by using firefly algorithm. Def. Technol. 2018, 14, 691–701. [Google Scholar] [CrossRef]
- Wu, P.; Xie, S.; Liu, H.; Li, M.; Li, H.; Peng, Y.; Li, X.; Luo, J. Autonomous obstacle avoidance of an unmanned surface vehicle based on cooperative manoeuvring. Ind. Robot Int. J. 2017, 44, 64–74. [Google Scholar] [CrossRef]
- Hu, X.; Chen, L.; Tang, B.; Cao, D.; He, H. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles. Mech. Syst. Signal Process. 2018, 100, 482–500. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A review on IoT deep learning UAV systems for autonomous obstacle detection and collision avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef]
- Dhulkefl, E.; Durdu, A.; Terzioğlu, H. Dijkstra algorithm using UAV path planning. Konya J. Eng. Sci. 2020, 8, 92–105. [Google Scholar] [CrossRef]
- Wei, K.; Ren, B. A method on dynamic path planning for robotic manipulator autonomous obstacle avoidance based on an improved RRT algorithm. Sensors 2018, 18, 571. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Surveillance of remote targets by UAVs. In Proceedings of the 2021 Australian & New Zealand Control Conference (ANZCC), Gold Coast, Australia, 25–26 November 2021; pp. 222–225. [Google Scholar]
- Cekmez, U.; Ozsiginan, M.; Sahingoz, O.K. A UAV path planning with parallel ACO algorithm on CUDA platform. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 347–354. [Google Scholar]
- Hanna, S.; Yan, H.; Cabric, D. Distributed UAV placement optimization for cooperative line-of-sight MIMO communications. In Proceedings of the ICASSP 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 4619–4623. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density | Number of Waypoints | Number of Obstacles | Un-Avoided Distance (m) | Brute Force Distance (m) | QuickNav Distance (m) | QuickNav Conv. Time (s) | Flight Time (s) | Distance Diff Brute Force/QuickNav (%) |
|---|---|---|---|---|---|---|---|---|
| Low | 10 | 20 | 153 | 159 | 155 | 2.58 | 155 | 3.6/1.2 |
| 13 | 25 | 195 | 211 | 197 | 9.29 | 197 | 8.6/1.4 | |
| Medium | 13 | 27 | 285 | 330 | 321 | 44.70 | 321 | 15.9/12.9 |
| High | 20 | 38 | 439 | 486 | 477 | 189.10 | 477 | 10.6/8.7 |
| 25 | 44 | 405 | 445 | 414 | 90.50 | 414 | 9.9/2.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Debnath, D.; Hawary, A.F.; Ramdan, M.I.; Alvarez, F.V.; Gonzalez, F. QuickNav: An Effective Collision Avoidance and Path-Planning Algorithm for UAS. Drones 2023, 7, 678. https://doi.org/10.3390/drones7110678
Debnath D, Hawary AF, Ramdan MI, Alvarez FV, Gonzalez F. QuickNav: An Effective Collision Avoidance and Path-Planning Algorithm for UAS. Drones. 2023; 7(11):678. https://doi.org/10.3390/drones7110678
Chicago/Turabian StyleDebnath, Dipraj, Ahmad Faizul Hawary, Muhammad Iftishah Ramdan, Fernando Vanegas Alvarez, and Felipe Gonzalez. 2023. "QuickNav: An Effective Collision Avoidance and Path-Planning Algorithm for UAS" Drones 7, no. 11: 678. https://doi.org/10.3390/drones7110678
APA StyleDebnath, D., Hawary, A. F., Ramdan, M. I., Alvarez, F. V., & Gonzalez, F. (2023). QuickNav: An Effective Collision Avoidance and Path-Planning Algorithm for UAS. Drones, 7(11), 678. https://doi.org/10.3390/drones7110678