
Multi-UAV Urban Logistics Task Allocation Method Based on MCTS


Abstract
:1. Introduction
2. Problem Description
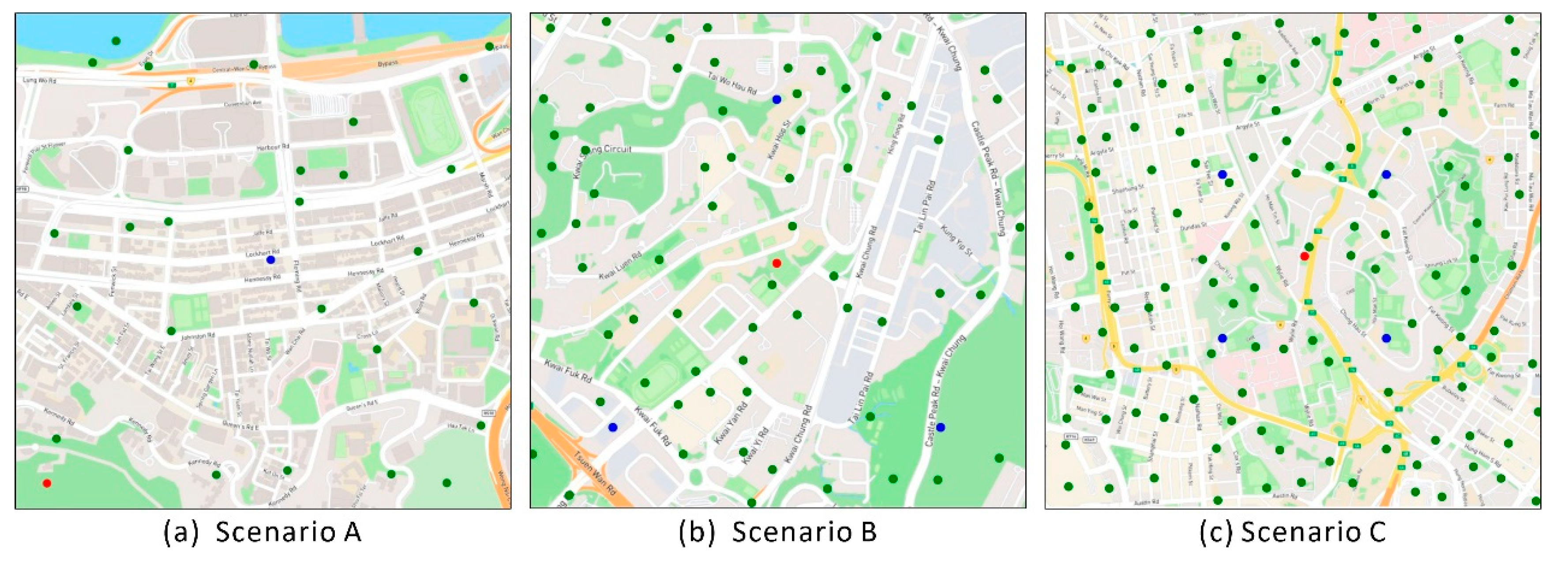
2.1. Problem Scenario
- The distribution center covers a specific area, and the distribution targets of the task are distributed in this area.
- UAV docks are distributed in this area and serve as service stations for UAVs to change their batteries.
- The UAVs have limited energy sources, and when low on power, the UAVs need to travel to docks for battery replacement.
- The UAVs have limited carrying capacity, and each can only carry a limited number of items of the same weight.
- The UAVs maintain a consistent flight speed throughout the delivery process, correlating energy consumption per kilometer to the number of items carried.
2.2. Task Model
3. Methodology
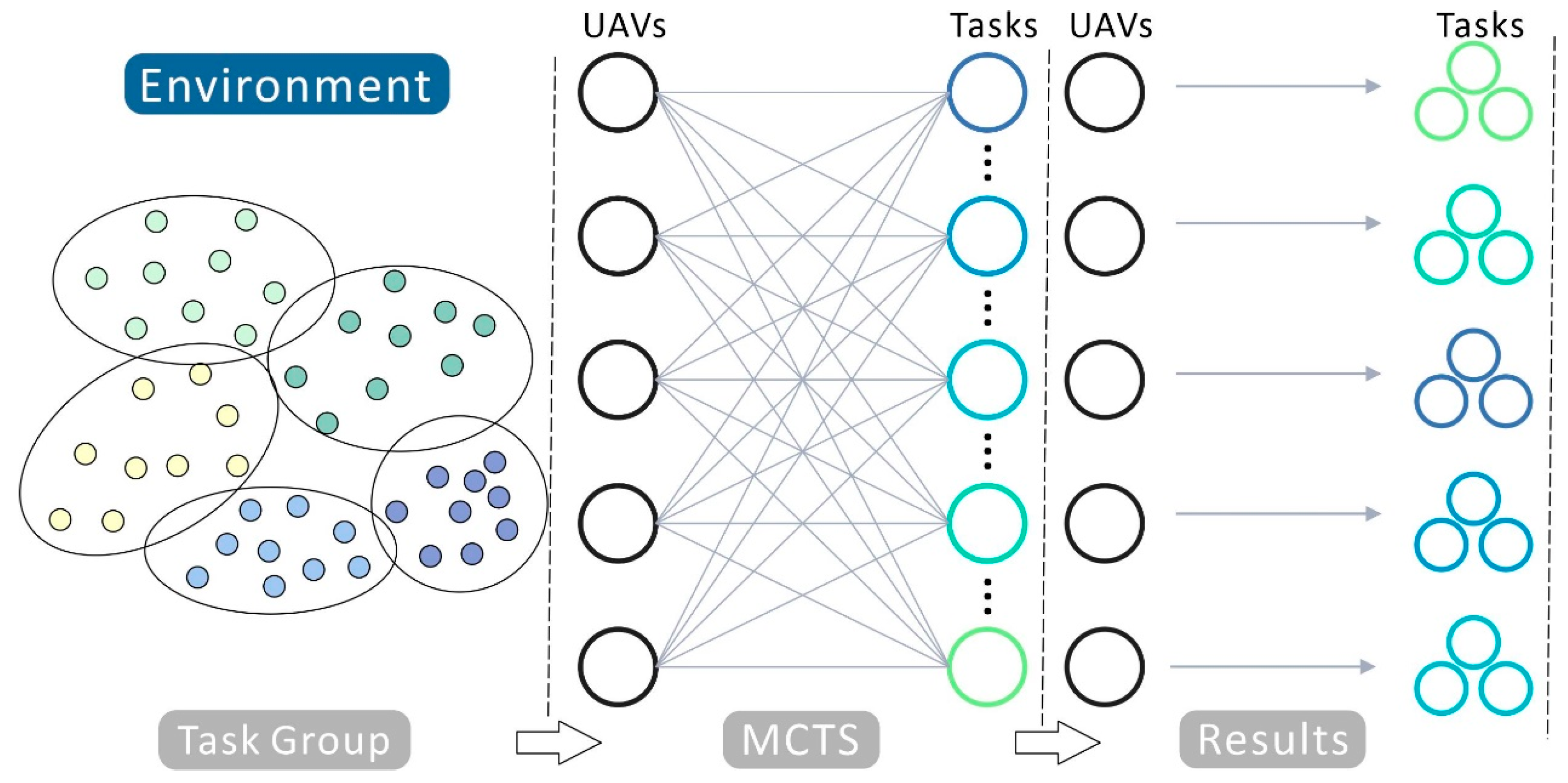
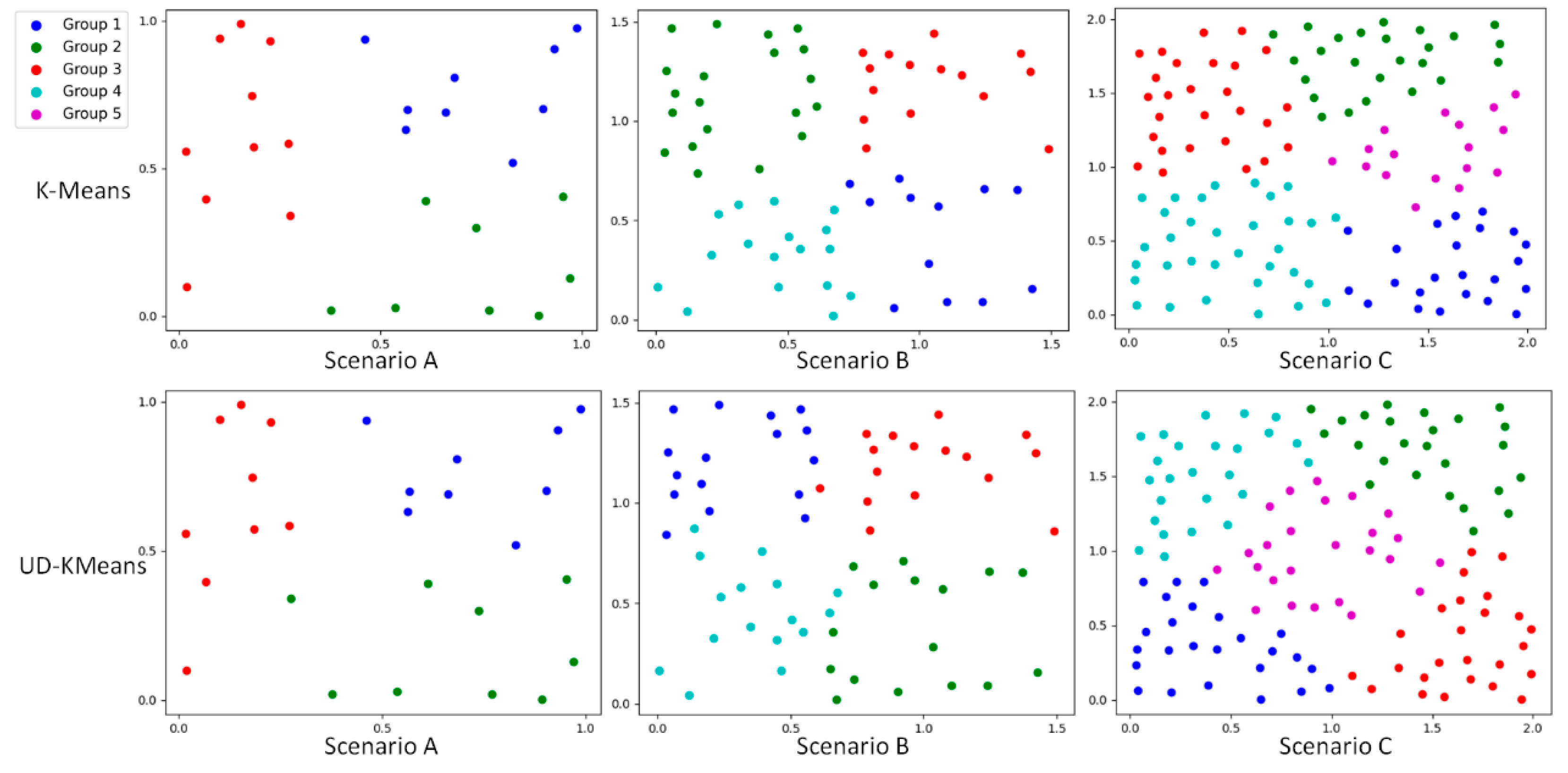
3.1. Task Grouping Strategy
| Algorithm 1: Uniform Distribution K-Means | |
| 1: | Initialization: |
| 2: | Construct a list of clustering centers |
| 3: | for to do |
| 4: | for each in do |
| 5: | , |
| 6: | end for |
| 7: | |
| 8: | Add new |
| 9: | end for |
| 10: | while is changed do |
| 11: | Clear all elements in |
| 12: | for each in do |
| 13: | |
| 14: | |
| 15: | end for |
| 16: | for each in do |
| 17: | while do |
| 18: | |
| 19: | |
| 20: | end while |
| 21: | end for |
| 22: | for each in do |
| 23: | |
| 24: | end for |
| 25: | end while |
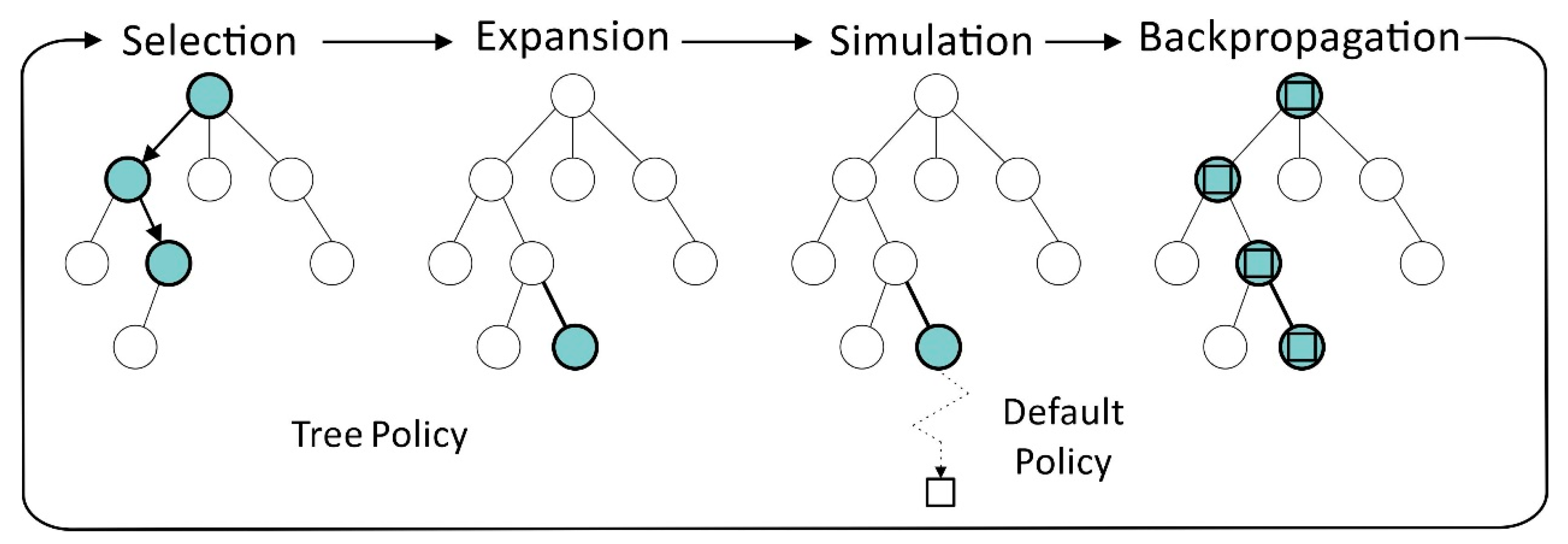
3.2. MCTS Task Allocation
| Algorithm 2: TA-MCTS | |
| 1: | Initialization: |
| 2: | |
| 3: | representing the DC. |
| 4: | denoting visited tasks |
| 5: | |
| 6: | while iterations are not completed do: |
| 7: | is randomly selected |
| 8: | |
| 9: | |
| 10: | then |
| 11: | |
| 12: | end if |
| 13: | |
| 14: | |
| 15: | end while |
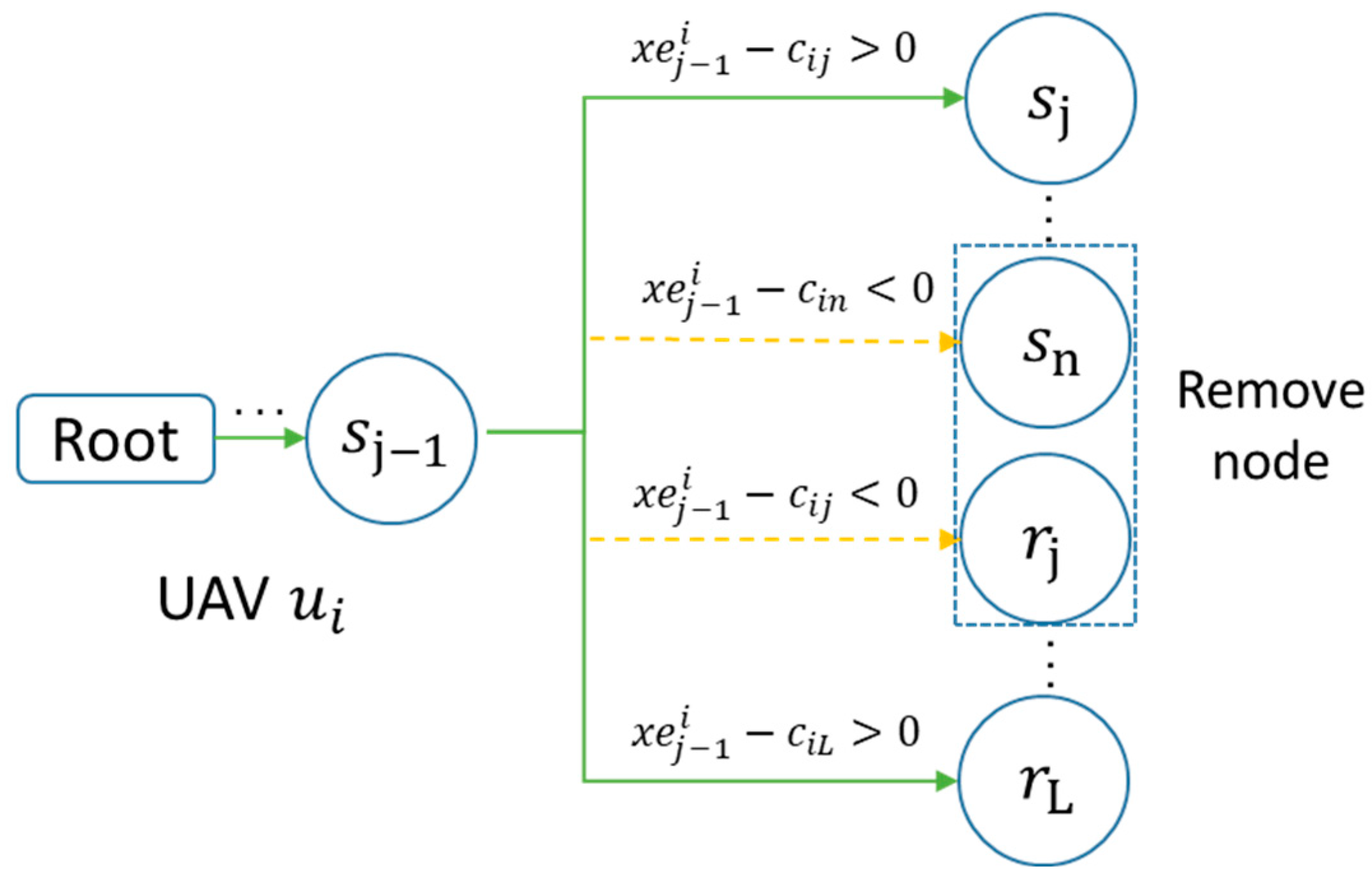
3.2.1. Selection and Expansion Optimization Strategy
| Algorithm 3: Selection and Expansion Optimization Strategy | |
| 1: | function |
| 2: | while state of satisfy do |
| 3: | if not fully expanded then |
| 4: | return |
| 5: | else |
| 6: | |
| 7: | end while |
| 8: | return |
| 9: | function |
| 10: | choose |
| 11: | is obtained by Equation (13) |
| 12: | if then |
| 13: | set state and position of the new node according to and |
| 14: | add a new child to |
| 15: | return |
| 16: | else |
| 17: | |
| 18: | end if |
| 19: | function |
| 20: | is obtained by Equation (10) |
| 21: | return |
3.2.2. Simulation Optimization Strategy
| Algorithm 4: Simulation Optimization Strategy | |
| 1: | function |
| 2: | set |
| 3: | while state of satisfy do |
| 4: | get the set of not visited position |
| 5: | |
| 6: | for each do |
| 7: | is obtained by Equation (13) |
| 8: | if then |
| 9: | by Equation (15) |
| 10: | |
| 11: | end if |
| 12: | end for |
| 13: | |
| 14: | |
| 15: | set state and position of the new node |
| 16: | |
| 17: | update matrix by Equation (14) |
| 18: | end while |
| 19: | according to Equation (8) |
| 20: | return |
4. Experiments
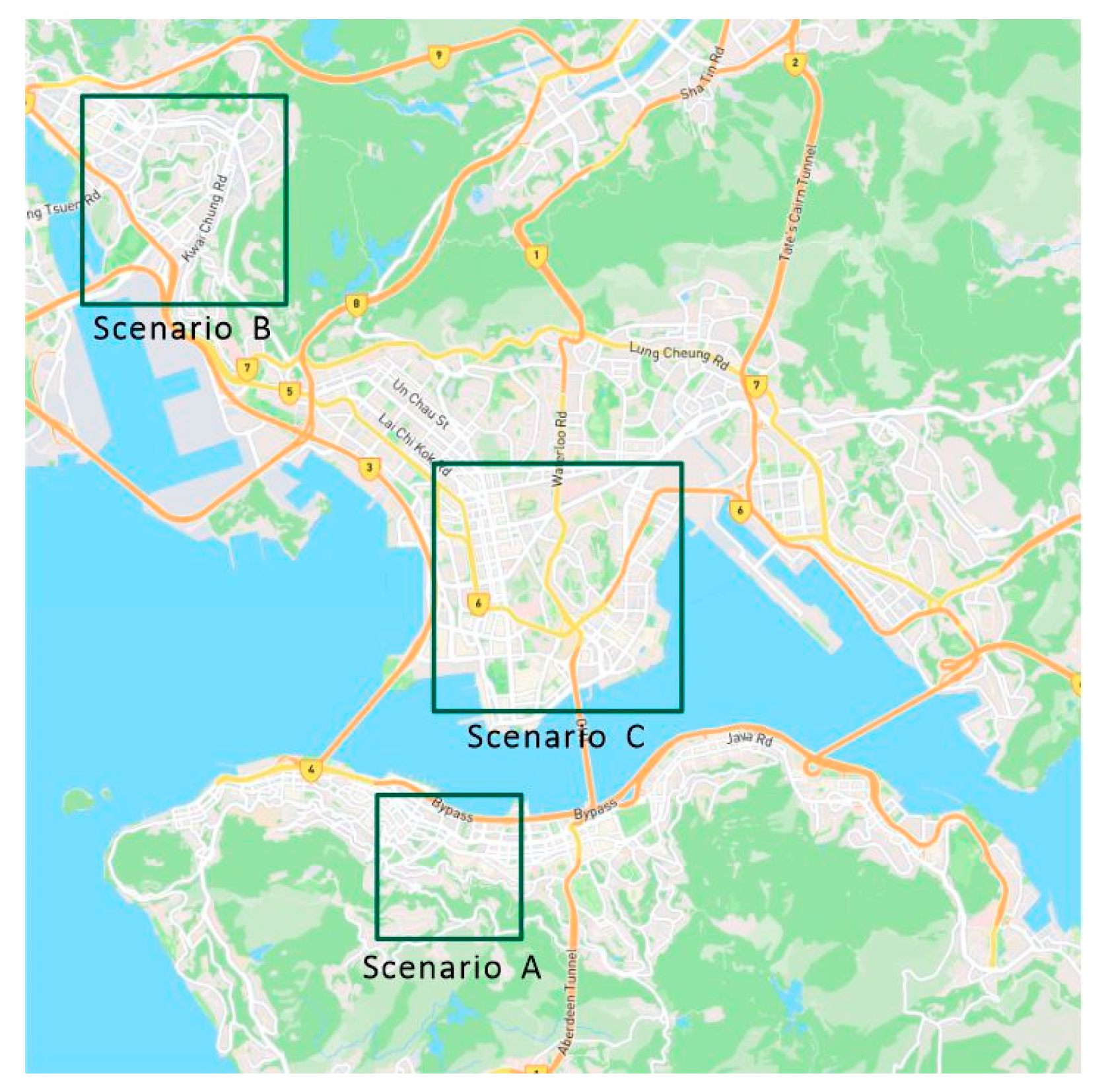
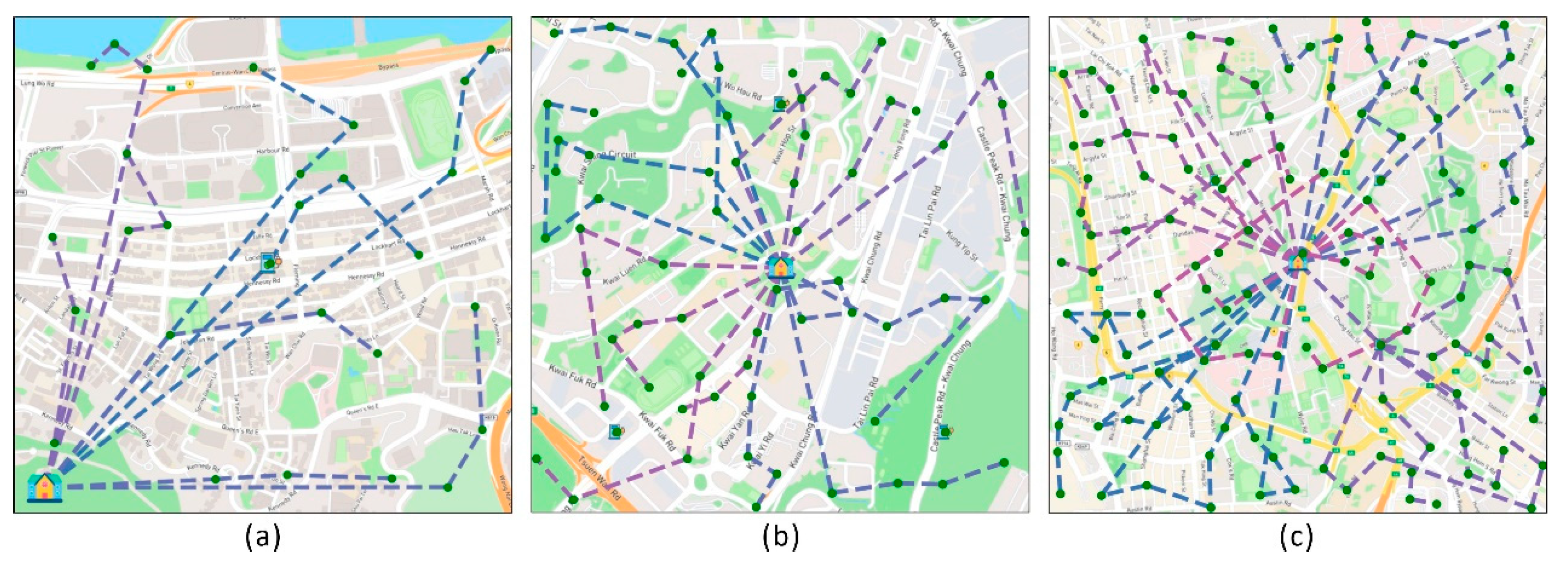
4.1. Experimental Environment
4.2. Task Grouping Comparison
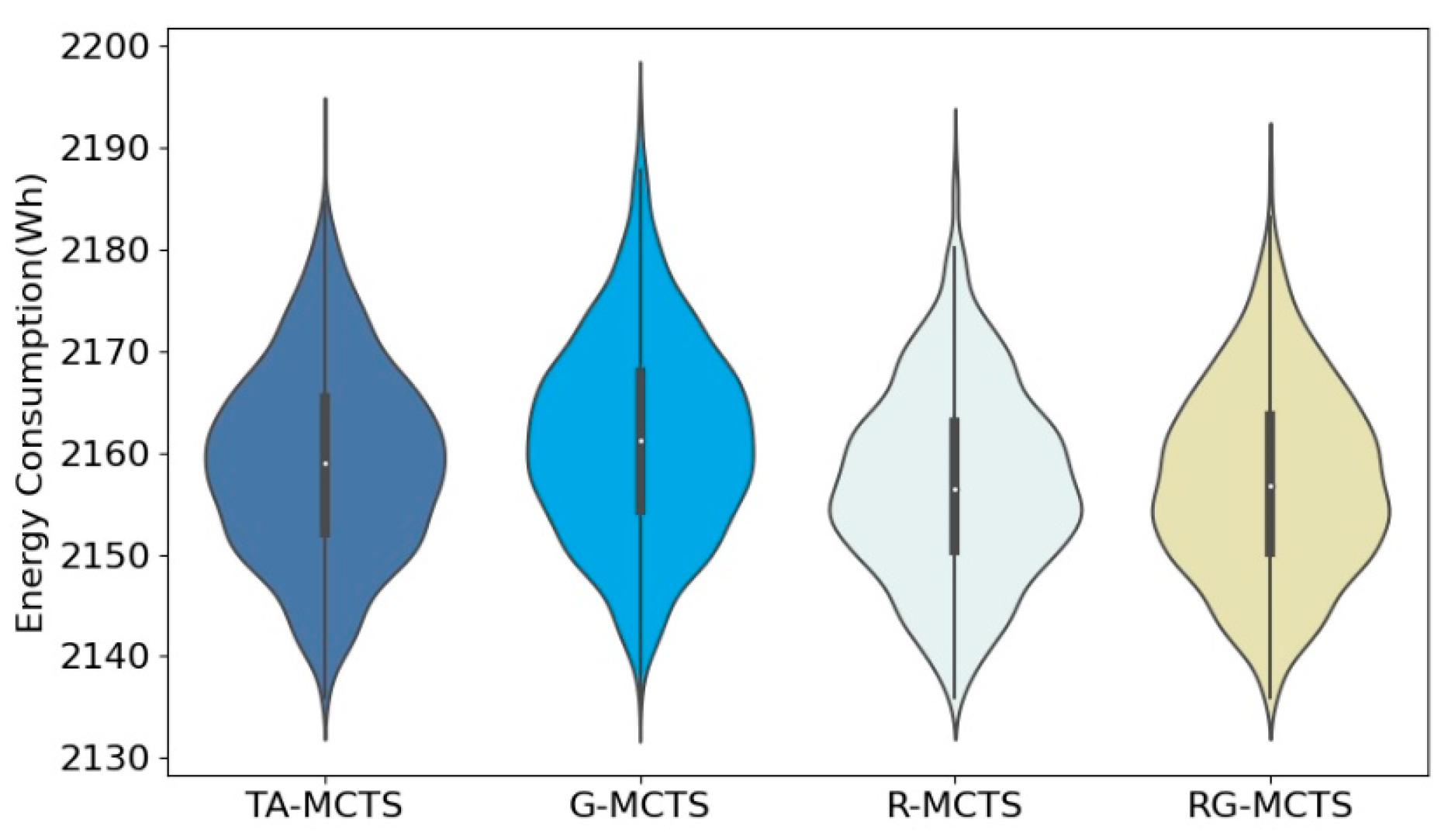
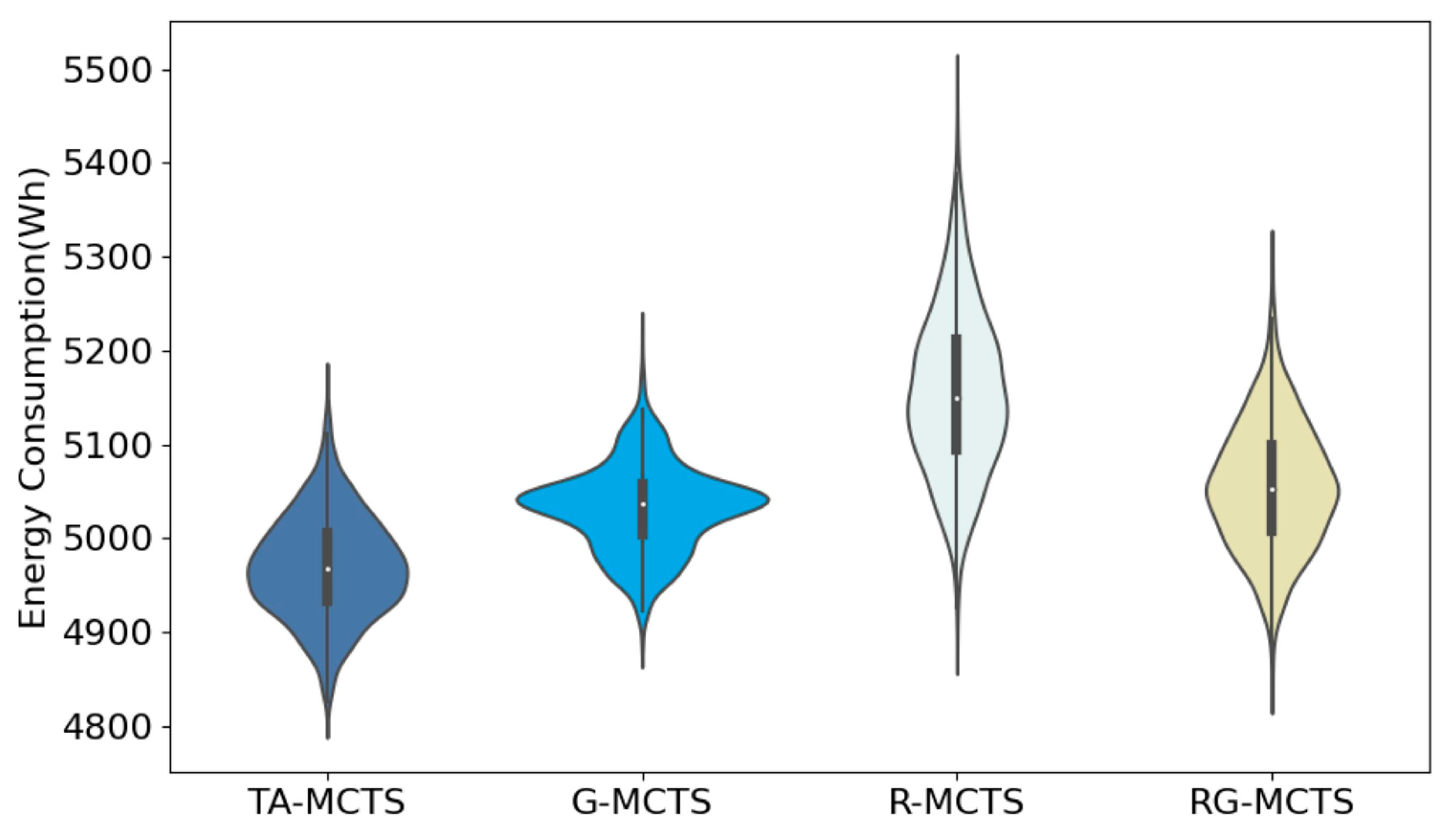
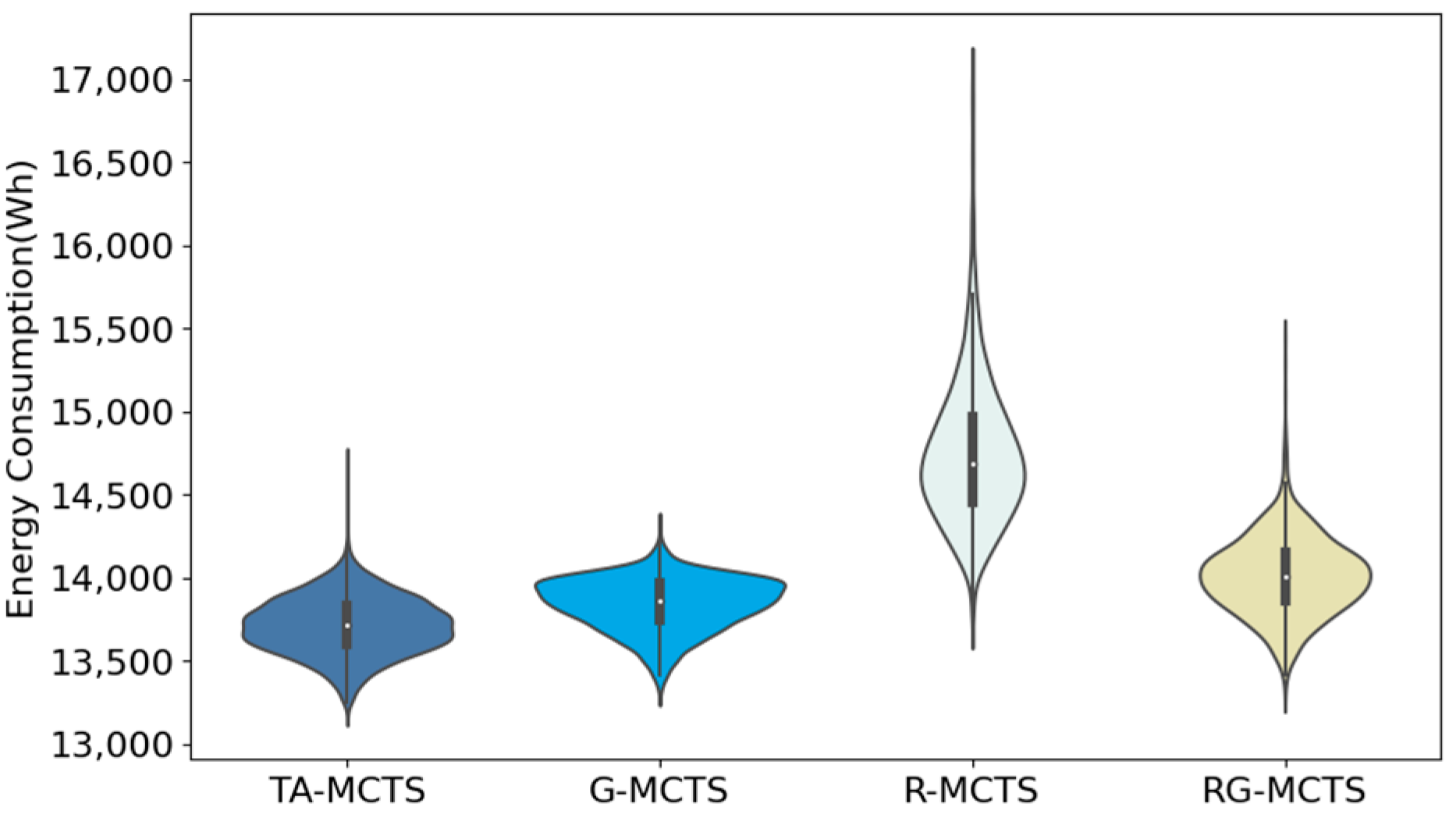
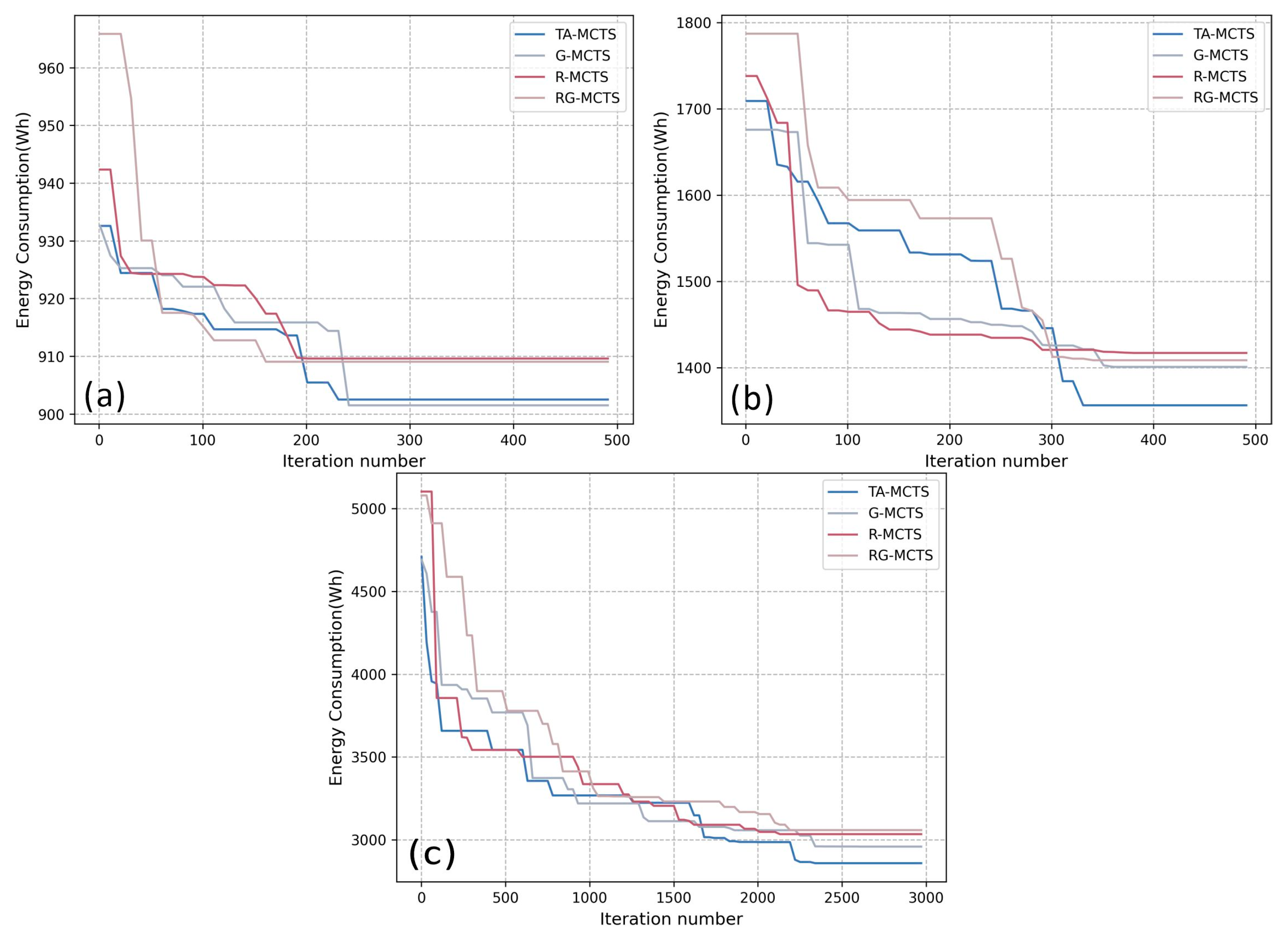
4.3. MCTS Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ahmed, F.; Mohanta, J.C.; Keshari, A.; Yadav, P.S. Recent Advances in Unmanned Aerial Vehicles: A Review. Arab. J. Sci. Eng. 2022, 47, 7963–7984. [Google Scholar] [CrossRef] [PubMed]
- Siebert, S.; Teizer, J. Mobile 3D Mapping for Surveying Earthwork Projects Using an Unmanned Aerial Vehicle (UAV) System. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Yeong, S.P.; King, L.M.; Dol, S.S. A Review on Marine Search and Rescue Operations Using Unmanned Aerial Vehicles. Int. J. Mar. Environ. Sci. 2015, 9, 396–399. [Google Scholar] [CrossRef]
- Coifman, B.; McCord, M.; Mishalani, R.G.; Redmill, K. Surface Transportation Surveillance from Unmanned Aerial Vehicles. In Proceedings of the 83rd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2004; Volume 28. [Google Scholar]
- Eichleay, M.; Evens, E.; Stankevitz, K.; Parker, C. Using the Unmanned Aerial Vehicle Delivery Decision Tool to Consider Transporting Medical Supplies via Drone. Glob. Health Sci. Pract. 2019, 7, 500–506. [Google Scholar] [CrossRef]
- Hossein Motlagh, N.; Taleb, T.; Arouk, O. Low-Altitude Unmanned Aerial Vehicles-Based Internet of Things Services: Comprehensive Survey and Future Perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Mehmood, Y.; Ahmad, F.; Yaqoob, I.; Adnane, A.; Imran, M.; Guizani, S. Internet-of-Things-Based Smart Cities: Recent Advances and Challenges. IEEE Commun. Mag. 2017, 55, 16–24. [Google Scholar] [CrossRef]
- Elloumi, M.; Dhaou, R.; Escrig, B.; Idoudi, H.; Saidane, L.A. Monitoring Road Traffic with a UAV-Based System. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Carlsson, J.G.; Song, S. Coordinated Logistics with a Truck and a Drone. Manag. Sci. 2018, 64, 4052–4069. [Google Scholar] [CrossRef]
- Pan, J.S.; Song, P.C.; Chu, S.C.; Peng, Y.J. Improved Compact Cuckoo Search Algorithm Applied to Location of Drone Logistics Hub. Mathematics 2020, 8, 333. [Google Scholar] [CrossRef]
- Pollet, B.G.; Staffell, I.; Shang, J.L. Current Status of Hybrid, Battery and Fuel Cell Electric Vehicles: From Electrochemistry to Market Prospects. Electrochim. Acta 2012, 84, 235–249. [Google Scholar] [CrossRef]
- Mitchell, S.; Steinbach, J.; Flanagan, T.; Ghabezi, P.; Harrison, N.; O’Reilly, S.; Killian, S.; Finnegan, W. Evaluating the Sustainability of Lightweight Drones for Delivery: Towards a Suitable Methodology for Assessment. Funct. Compos. Mater 2023, 4, 4. [Google Scholar] [CrossRef]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy Use and Life Cycle Greenhouse Gas Emissions of Drones for Commercial Package Delivery. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef] [PubMed]
- Kang, P.; Song, G.; Xu, M.; Miller, T.R.; Wang, H.; Zhang, H.; Liu, G.; Zhou, Y.; Ren, J.; Zhong, R.; et al. Low-Carbon Pathways for the Booming Express Delivery Sector in China. Nat. Commun. 2021, 12, 450. [Google Scholar] [CrossRef] [PubMed]
- Goodchild, A.; Toy, J. Delivery by Drone: An Evaluation of Unmanned Aerial Vehicle Technology in Reducing CO2 Emissions in the Delivery Service Industry. Transp. Res. Part D Transp. Environ. 2018, 61, 58–67. [Google Scholar] [CrossRef]
- Djimantoro, M.I.; Suhardjanto, G. The Advantage by Using Low-Altitude UAV for Sustainable Urban Development Control. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 109. [Google Scholar] [CrossRef]
- Singireddy, S.R.R.; Daim, T.U. Technology Roadmap: Drone Delivery—Amazon Prime Air. Innov. Technol. Knowl. Manag. 2018, 387–412. [Google Scholar] [CrossRef]
- Hwang, J.; Choe, J.Y. (Jacey). Exploring Perceived Risk in Building Successful Drone Food Delivery Services. Int. J. Contemp. Hosp. Manag. 2019, 31, 3249–3269. [Google Scholar] [CrossRef]
- Scott, J.; Scott, C. Drone Delivery Models for Healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Hilton Waikoloa Village, HI, USA, 4–7 January 2017. [Google Scholar]
- Yoo, W.; Yu, E.; Jung, J. Drone Delivery: Factors Affecting the Public’s Attitude and Intention to Adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- De Silva, S.C.; Phlernjai, M.; Rianmora, S.; Ratsamee, P. Inverted Docking Station: A Conceptual Design for a Battery-Swapping Platform for Quadrotor UAVs. Drones 2022, 6, 56. [Google Scholar] [CrossRef]
- Grlj, C.G.; Krznar, N.; Pranjić, M. A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms. Drones 2022, 6, 17. [Google Scholar] [CrossRef]
- Bláha, L.; Severa, O.; Goubej, M.; Myslivec, T.; Reitinger, J. Automated Drone Battery Management System—Droneport: Technical Overview. Drones 2023, 7, 234. [Google Scholar] [CrossRef]
- Oh, G.; Kim, Y.; Ahn, J.; Choi, H.-L. Task Allocation of Multiple UAVs for Cooperative Parcel Delivery. In Advances in Aerospace Guidance, Navigation and Control; Springer: Berlin/Heidelberg, Germany, 2018; pp. 443–454. [Google Scholar] [CrossRef]
- Kuhn, H.W. The Hungarian Method for the Assignment Problem. Nav. Res. Logist. Q. 1955, 2, 83–97. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, A. 3D Trajectory Planning Method for UAVs Swarm in Building Emergencies. Sensors 2020, 20, 642. [Google Scholar] [CrossRef] [PubMed]
- Bellingham, J.; Tillerson, M.; Richards, A.; How, J.P. Multi-Task Allocation and Path Planning for Cooperating UAVs. In Cooperative Control: Models, Applications and Algorithms; Springer: Berlin/Heidelberg, Germany, 2003; pp. 23–41. [Google Scholar] [CrossRef]
- Driess, D.; Oguz, O.; Ha, J.S.; Toussaint, M. Deep Visual Heuristics: Learning Feasibility of Mixed-Integer Programs for Manipulation Planning. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9563–9569. [Google Scholar] [CrossRef]
- Weckenborg, C.; Kieckhäfer, K.; Müller, C.; Grunewald, M.; Spengler, T.S. Balancing of Assembly Lines with Collaborative Robots. Bus. Res. 2020, 13, 93–132. [Google Scholar] [CrossRef]
- Seenu, N.; Kuppan Chetty, R.M.; Ramya, M.M.; Janardhanan, M.N. Review on State-of-the-Art Dynamic Task Allocation Strategies for Multiple-Robot Systems. Ind. Rob. 2020, 47, 929–942. [Google Scholar] [CrossRef]
- Liu, C.; Kroll, A. A Centralized Multi-Robot Task Allocation for Industrial Plant Inspection by Using A* and Genetic Algorithms. In International Conference on Artificial Intelligence and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7268, pp. 466–474. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992; ISBN 0262581116. [Google Scholar]
- Martin, J.G.; Frejo, J.R.D.; García, R.A.; Camacho, E.F. Multi-Robot Task Allocation Problem with Multiple Nonlinear Criteria Using Branch and Bound and Genetic Algorithms. Intell. Serv. Robot. 2021, 14, 707–727. [Google Scholar] [CrossRef]
- Wei, C.; Ji, Z.; Cai, B. Particle Swarm Optimization for Cooperative Multi-Robot Task Allocation: A Multi-Objective Approach. IEEE Robot. Autom. Lett. 2020, 5, 2530–2537. [Google Scholar] [CrossRef]
- Mouradian, C.; Sahoo, J.; Glitho, R.H.; Morrow, M.J.; Polakos, P.A. A Coalition Formation Algorithm for Multi-Robot Task Allocation in Large-Scale Natural Disasters. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 1909–1914. [Google Scholar] [CrossRef]
- Puttewar, A.S.; Chatpalliwar, A.S. An Overview of Ant Colony Optimization (ACO) for Multiple-Robot Task Allocation (MRTA). Res. J. Eng. Technol. 2013, 4, 107–112. [Google Scholar]
- Bertsekas, D.P. Auction Algorithms. Encycl. Optim. 2009, 1, 73–77. [Google Scholar]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-Based Decentralized Auctions for Robust Task Allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]
- Cheng, Q.; Yin, D.; Yang, J.; Shen, L. An Auction-Based Multiple Constraints Task Allocation Algorithm for Multi-UAV System. In Proceedings of the 2016 International Conference on Cybernetics, Robotics and Control (CRC), Hong Kong, China, 19–21 August 2016; IEEE: New York, NY, USA, 2016; pp. 1–5. [Google Scholar]
- Otte, M.; Kuhlman, M.J.; Sofge, D. Auctions for Multi-Robot Task Allocation in Communication Limited Environments. Auton. Robots 2020, 44, 547–584. [Google Scholar] [CrossRef]
- Bai, X.; Fielbaum, A.; Kronmuller, M.; Knoedler, L.; Alonso-Mora, J. Group-Based Distributed Auction Algorithms for Multi-Robot Task Assignment. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1292–1303. [Google Scholar] [CrossRef]
- Coulom, R. Efficient Selectivity and Backup Operators in Monte-Carlo Tree Search. In International Conference on Computers and Games; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4630, pp. 72–83. [Google Scholar] [CrossRef]
- Silver, D.; Huang, A.; Maddison, C.J.; Guez, A.; Sifre, L.; Van Den Driessche, G.; Schrittwieser, J.; Antonoglou, I.; Panneershelvam, V.; Lanctot, M.; et al. Mastering the Game of Go with Deep Neural Networks and Tree Search. Nature 2016, 529, 484–489. [Google Scholar] [CrossRef] [PubMed]
- Senington, R.; Schmidt, B.; Syberfeldt, A. Monte Carlo Tree Search for Online Decision Making in Smart Industrial Production. Comput. Ind. 2021, 128, 103433. [Google Scholar] [CrossRef]
- Qi, H.; Hu, X. Monte Carlo Tree Search-Based Intersection Signal Optimization Model with Channelized Section Spillover. Transp. Res. Part C Emerg. Technol. 2019, 106, 281–302. [Google Scholar] [CrossRef]
- Mo, S.; Pei, X.; Wu, C. Safe Reinforcement Learning for Autonomous Vehicle Using Monte Carlo Tree Search. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6766–6773. [Google Scholar] [CrossRef]
- Qian, Y.; Sheng, K.; Ma, C.; Li, J.; Ding, M.; Hassan, M. Path Planning for the Dynamic UAV-Aided Wireless Systems Using Monte Carlo Tree Search. IEEE Trans. Veh. Technol. 2022, 71, 6716–6721. [Google Scholar] [CrossRef]
- Grelier, C.; Goudet, O.; Hao, J.K. On Monte Carlo Tree Search for Weighted Vertex Coloring. In European Conference on Evolutionary Computation in Combinatorial Optimization (Part of EvoStar); Springer: Berlin/Heidelberg, Germany, 2022; Volume 13222, pp. 1–16. [Google Scholar] [CrossRef]
- Browne, C.B.; Powley, E.; Whitehouse, D.; Lucas, S.M.; Cowling, P.I.; Rohlfshagen, P.; Tavener, S.; Perez, D.; Samothrakis, S.; Colton, S. A Survey of Monte Carlo Tree Search Methods. IEEE Trans. Comput. Intell. AI Games 2012, 4, 1–43. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Method Type | Application Scenario | Objectives | Constraints |
|---|---|---|---|---|
| [27] | Hungarian method | UAV rescue service | Time consumption | Obstacle avoidance |
| [28] | mixed-integer programming | UAV fleet coordination | Travel distance | Obstacle avoidance |
| [29] | mixed-integer programming | Robot trajectory planning | Action cost | Robots action Feasibility |
| [30] | mixed-integer programming | Robot tasks allocation | Time consumption | Tasks feasibility |
| [32] | Genetic Algorithm | UAVs inspection service | Time consumption | Obstacle avoidance |
| [34] | Genetic Algorithm | UAVs inspection service | Time and energy consumption | Tasks feasibility |
| [35] | Particle Swarm Optimization | Robot task allocation | Travel distance | Computing capacity |
| [36] | Particle Swarm Optimization | Robot rescue service | Computing time | Robot capability |
| [39] | Auction algorithm | autonomous vehicles task allocation | Travel distance and feasible solutions | Communication capability |
| [40] | Auction algorithm | UAVs task allocation | Travel cost | Time window |
| [41] | Auction algorithm | Robot task allocation | Travel cost | Communication capability |
| [42] | Auction algorithm | Robot task allocation | Time consumption | Time window |
| [45] | Monte Carlo Tree Search | Human-robot collaboration | Time consumption | Task execution time |
| [46] | Monte Carlo Tree Search | Traffic signal optimization | Signal optimization | Computing capacity |
| [47] | Monte Carlo Tree Search | Autonomous driving | Driving safety | Obstacle avoidance |
| [48] | Monte Carlo Tree Search | UAV-aided wireless systems | UAV path and computing time | Energy consumption and user fairness |
| This paper | Monte Carlo Tree Search | City delivery | Energy consumption | Energy consumption and replenishment payload capacity |
| Scenarios | Area Size (km2) | Latitude and Longitude in the Lower-Left Corner | Relative Location of DC (km) | Relative Location of UAV Docks (km) | Number of Tasks |
|---|---|---|---|---|---|
| Scenario A | 114.16885° E 22.27325° N | (0, 0) | (0.5, 0.5) | 27 | |
| Scenario B | 114.12077° E 22.35433° N | (0.75, 0.75) | (0.75, 1.25) (0.25, 0.25) (1.25, 0.25) | 64 | |
| Scenario C | 114.16395° E 22.30251° N | (1,1) | (0.6, 0.6) (1.3, 0.6) (0.6, 1.3) (1.3, 1.3) | 125 |
| Parameters | Scenario A | Scenario B | Scenario C |
|---|---|---|---|
| Number of UAV docks | 1 | 3 | 4 |
| 3 | 4 | 5 | |
| 400 Wh | 500 Wh | 600 Wh | |
| 80 Wh/km | 100 Wh/km | 120 Wh/km | |
| 30 Wh/km | 50 Wh/km | 50 Wh/km | |
| 3 | 4 | 5 |
| Scenario | Group | K-Means | UD-Kmeans |
|---|---|---|---|
| Scenario A | Group1 | 9 | 9 |
| Group2 | 8 | 9 | |
| Group3 | 10 | 9 | |
| Scenario B | Group1 | 12 | 16 |
| Group2 | 20 | 16 | |
| Group3 | 15 | 16 | |
| Group4 | 17 | 16 | |
| Scenario C | Group1 | 23 | 25 |
| Group2 | 25 | 25 | |
| Group3 | 27 | 25 | |
| Group4 | 33 | 25 | |
| Group5 | 17 | 25 |
| Number of Experiments | TA-MCTS | G-MCTS | R-MCTS | RG-MCTS |
|---|---|---|---|---|
| 50 | 0.18 | 0.14 | 0.36 | 0.22 |
| 100 | 0.17 | 0.2 | 0.28 | 0.26 |
| 150 | 0.26 | 0.17 | 0.15 | 0.22 |
| 200 | 0.19 | 0.17 | 0.18 | 0.18 |
| 1000 | 0.22 | 0.16 | 0.21 | 0.25 |
| 2000 | 0.21 | 0.16 | 0.21 | 0.24 |
| Number of Experiments | TA-MCTS | G-MCTS | R-MCTS | RG-MCTS |
|---|---|---|---|---|
| 50 | 0.42 | 1.01 | 0.56 | 0.62 |
| 100 | 0.46 | 1.02 | 0.64 | 0.64 |
| 150 | 0.44 | 1.01 | 0.49 | 0.57 |
| 200 | 0.49 | 0.96 | 0.58 | 0.57 |
| 1000 | 0.47 | 1.01 | 0.52 | 0.66 |
| 2000 | 0.44 | 0.99 | 0.55 | 0.67 |
| Number of Experiments | TA-MCTS | G-MCTS | R-MCTS | RG-MCTS |
|---|---|---|---|---|
| 50 | 15.54 | 17.44 | 19.66 | 15.84 |
| 100 | 16.19 | 18.16 | 19.17 | 17.68 |
| 150 | 16.34 | 18.59 | 19.61 | 16.78 |
| 200 | 16.44 | 18.14 | 19.56 | 16.78 |
| 1000 | 16.49 | 18.63 | 19.36 | 16.91 |
| 2000 | 16.33 | 18.64 | 19.29 | 16.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Chen, J. Multi-UAV Urban Logistics Task Allocation Method Based on MCTS. Drones 2023, 7, 679. https://doi.org/10.3390/drones7110679
Ma Z, Chen J. Multi-UAV Urban Logistics Task Allocation Method Based on MCTS. Drones. 2023; 7(11):679. https://doi.org/10.3390/drones7110679
Chicago/Turabian StyleMa, Zeyuan, and Jing Chen. 2023. "Multi-UAV Urban Logistics Task Allocation Method Based on MCTS" Drones 7, no. 11: 679. https://doi.org/10.3390/drones7110679
APA StyleMa, Z., & Chen, J. (2023). Multi-UAV Urban Logistics Task Allocation Method Based on MCTS. Drones, 7(11), 679. https://doi.org/10.3390/drones7110679