
A Novel Scouring Method to Monitor Nocturnal Mammals Using Uncrewed Aerial Vehicles and Thermal Cameras—A Comparison to Line Transect Spotlight Counts




Abstract
:1. Introduction
1.1. Spotlight Counts
1.2. Drones in Wildlife Monitoring
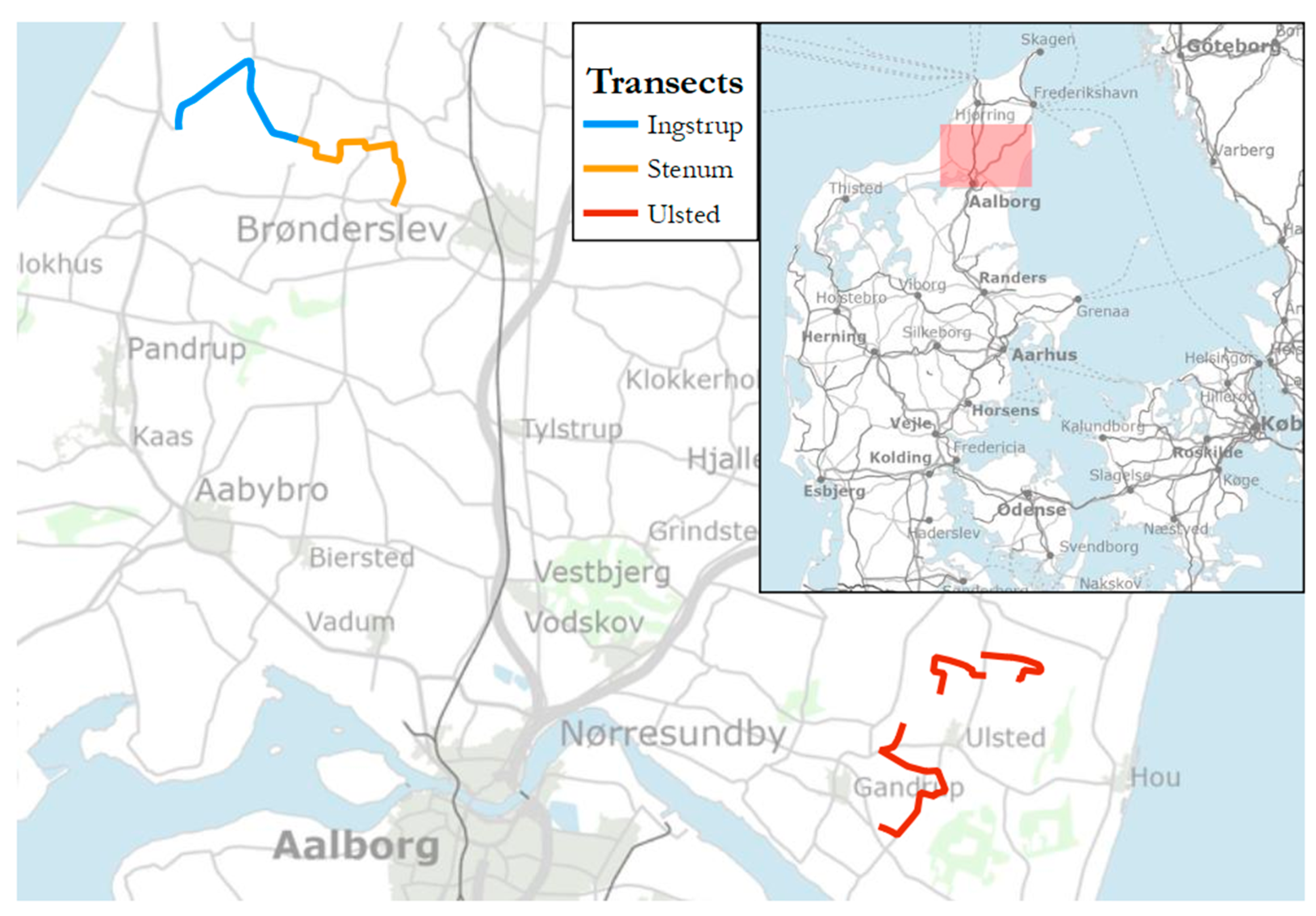
2. Materials and Methods
2.1. Transect Spotlight Counts—Citizen Science
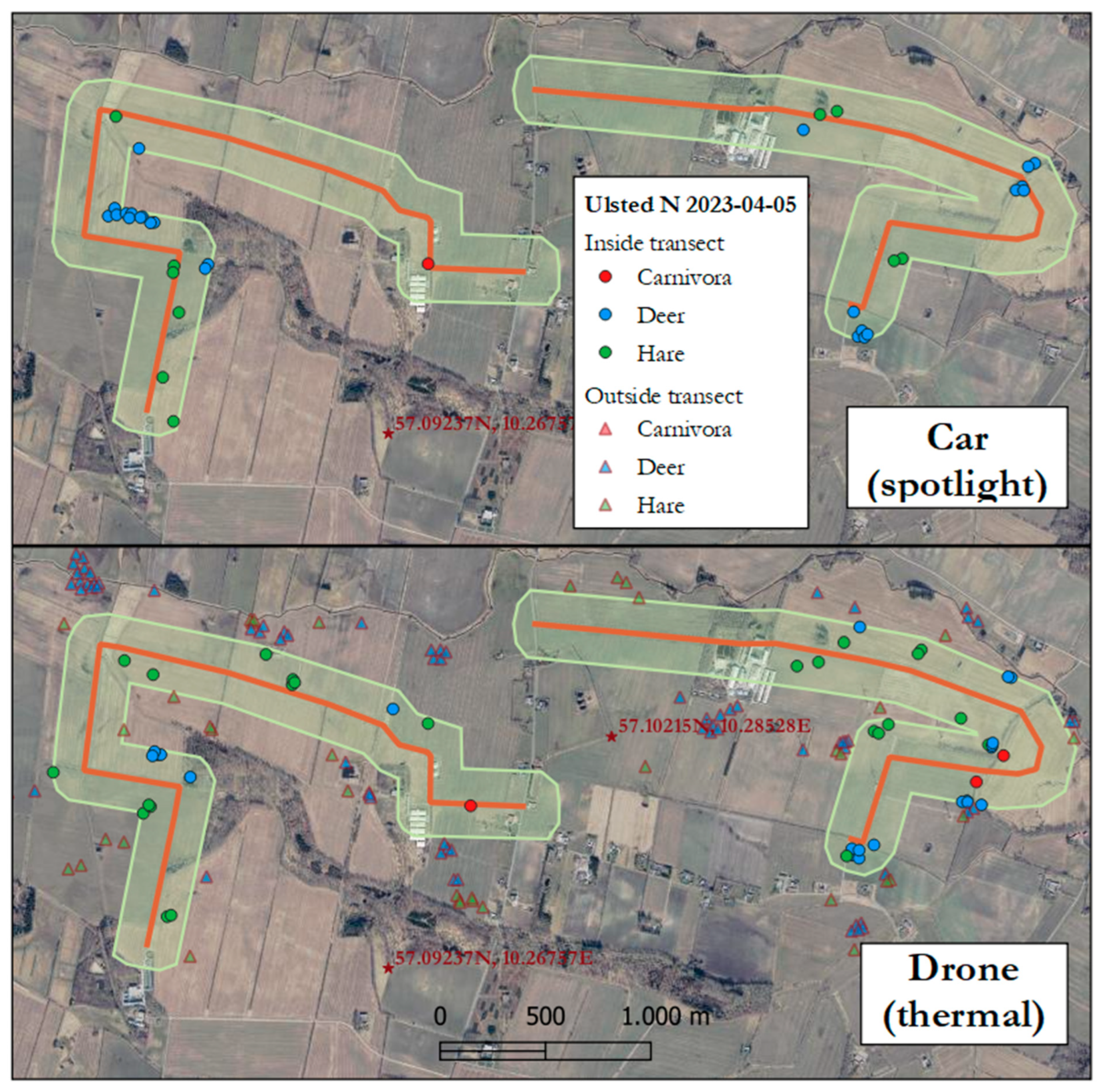
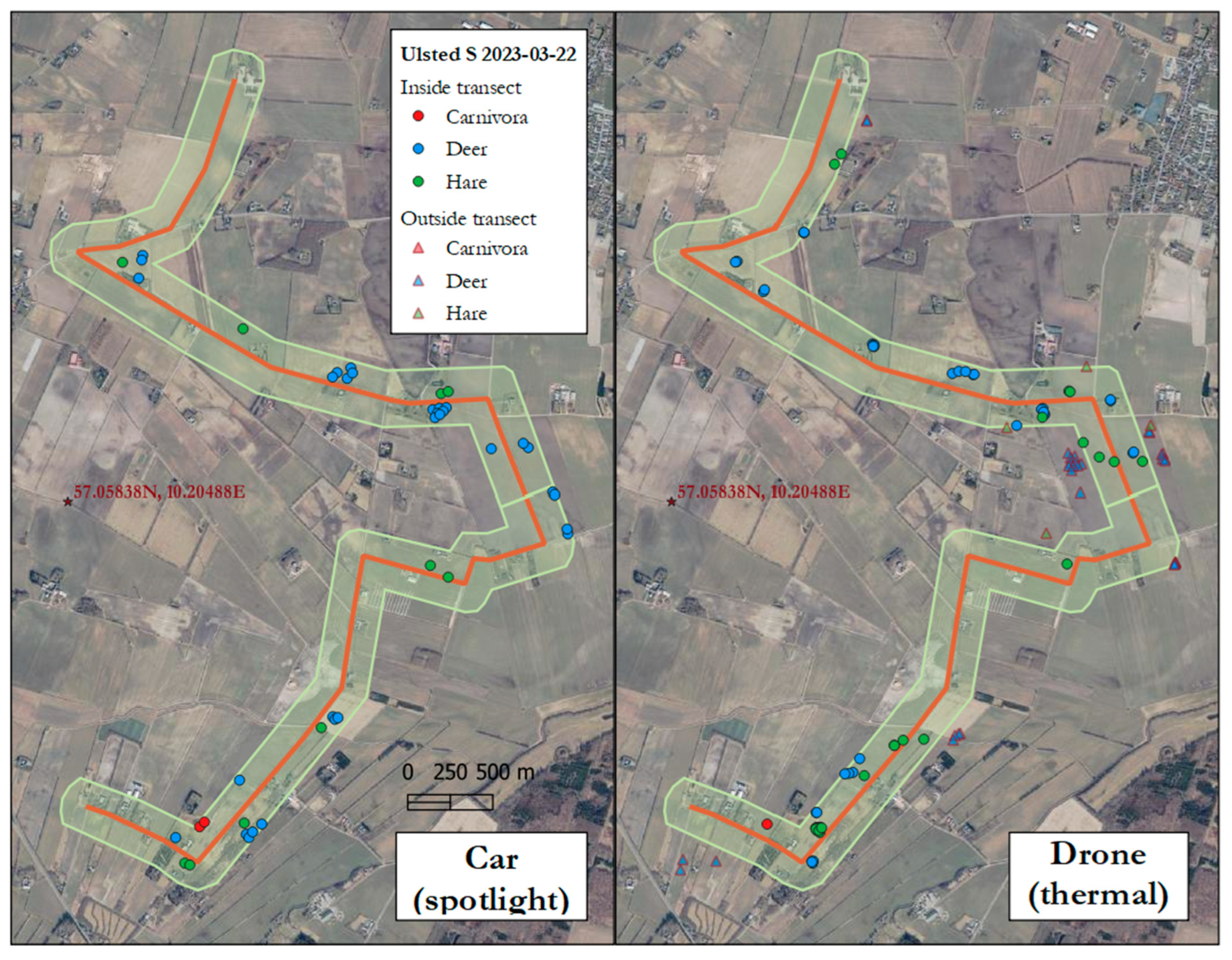
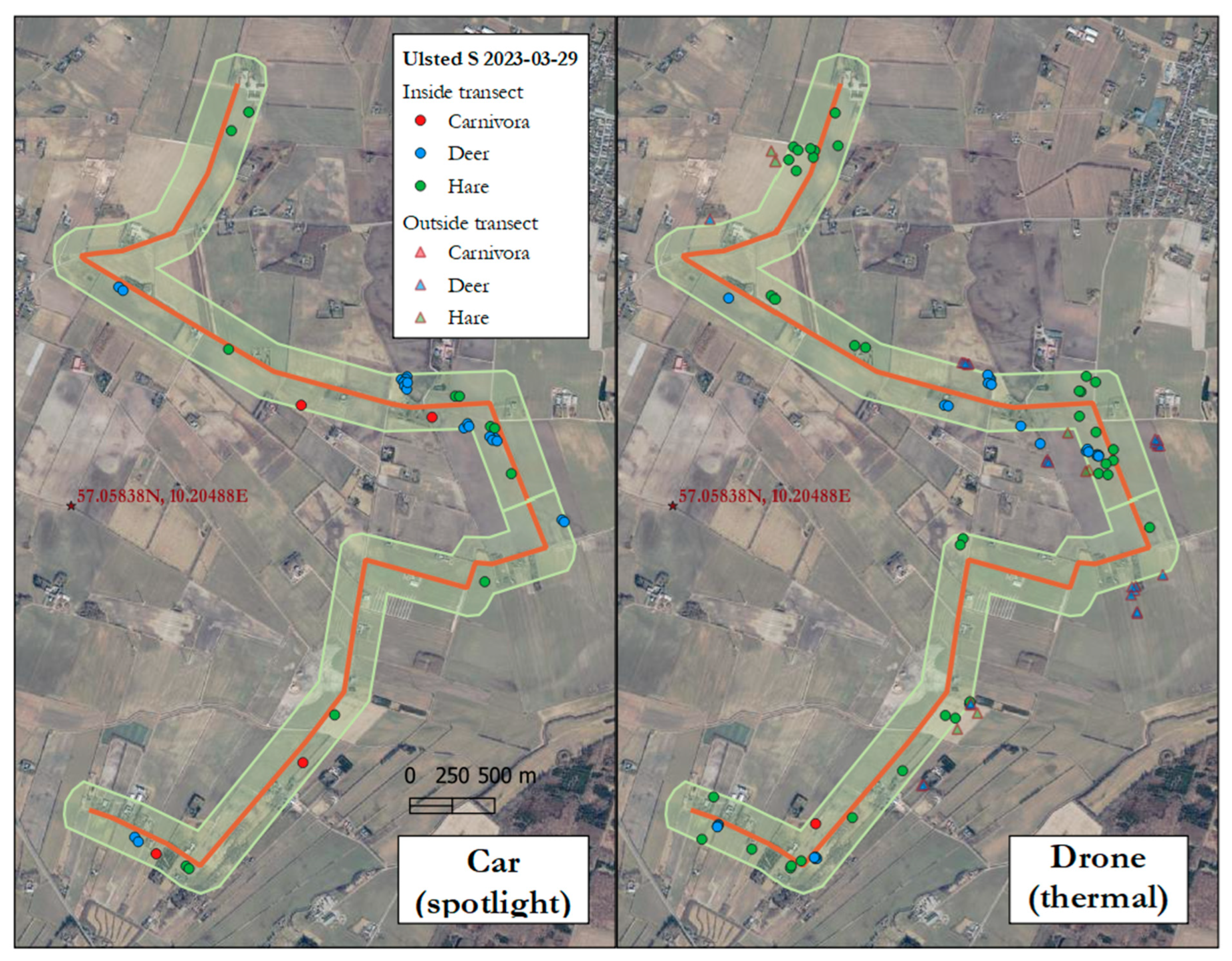
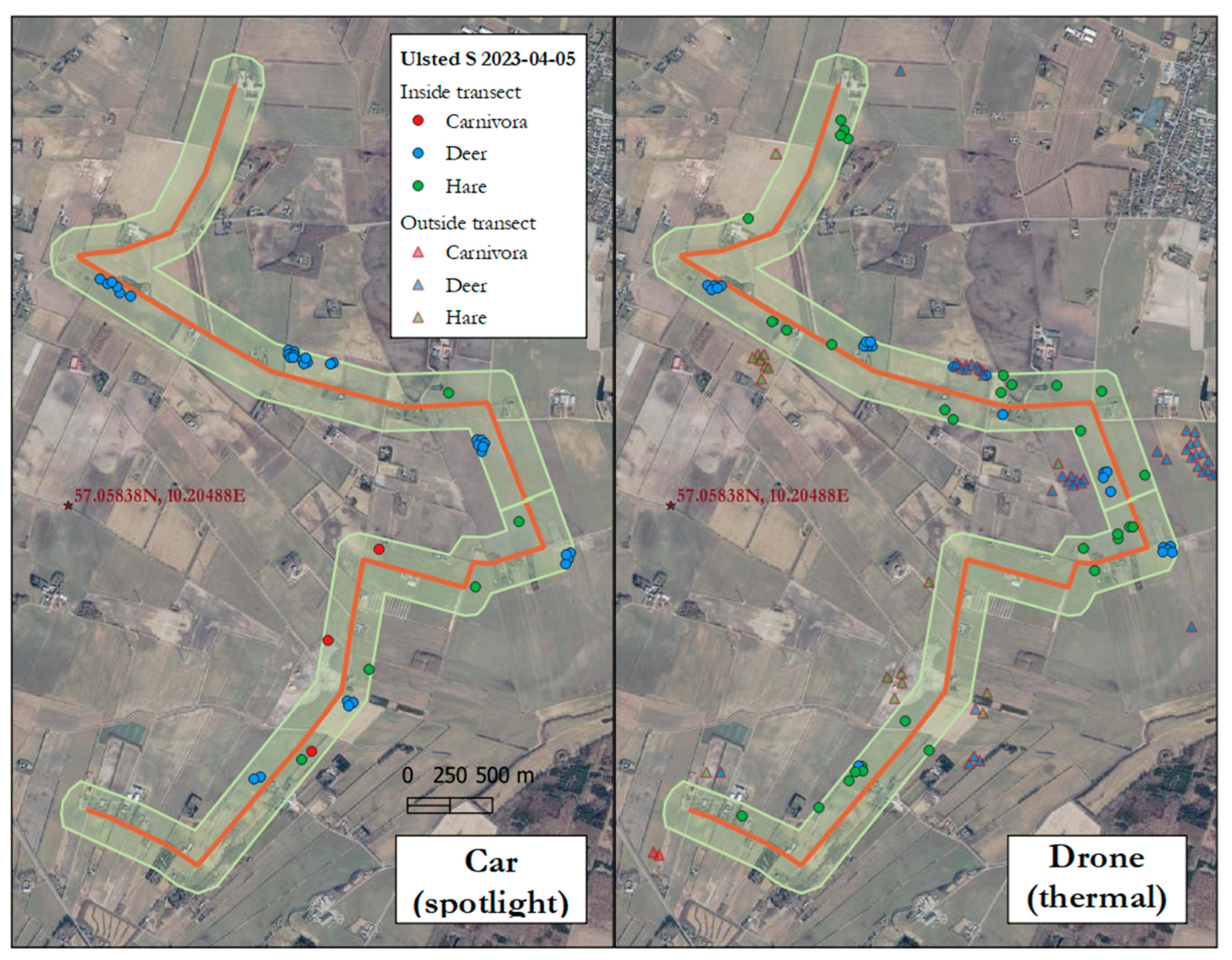
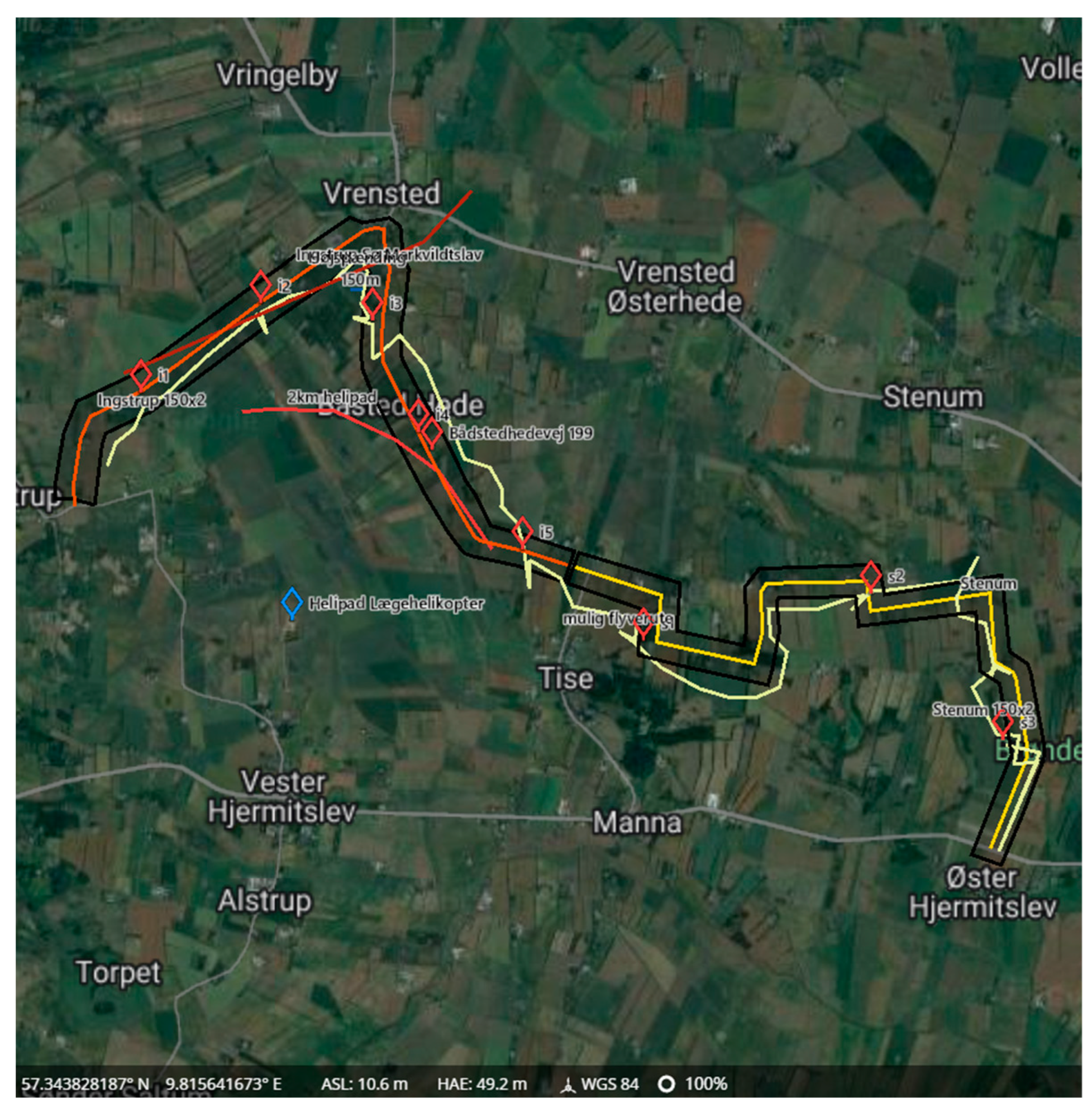
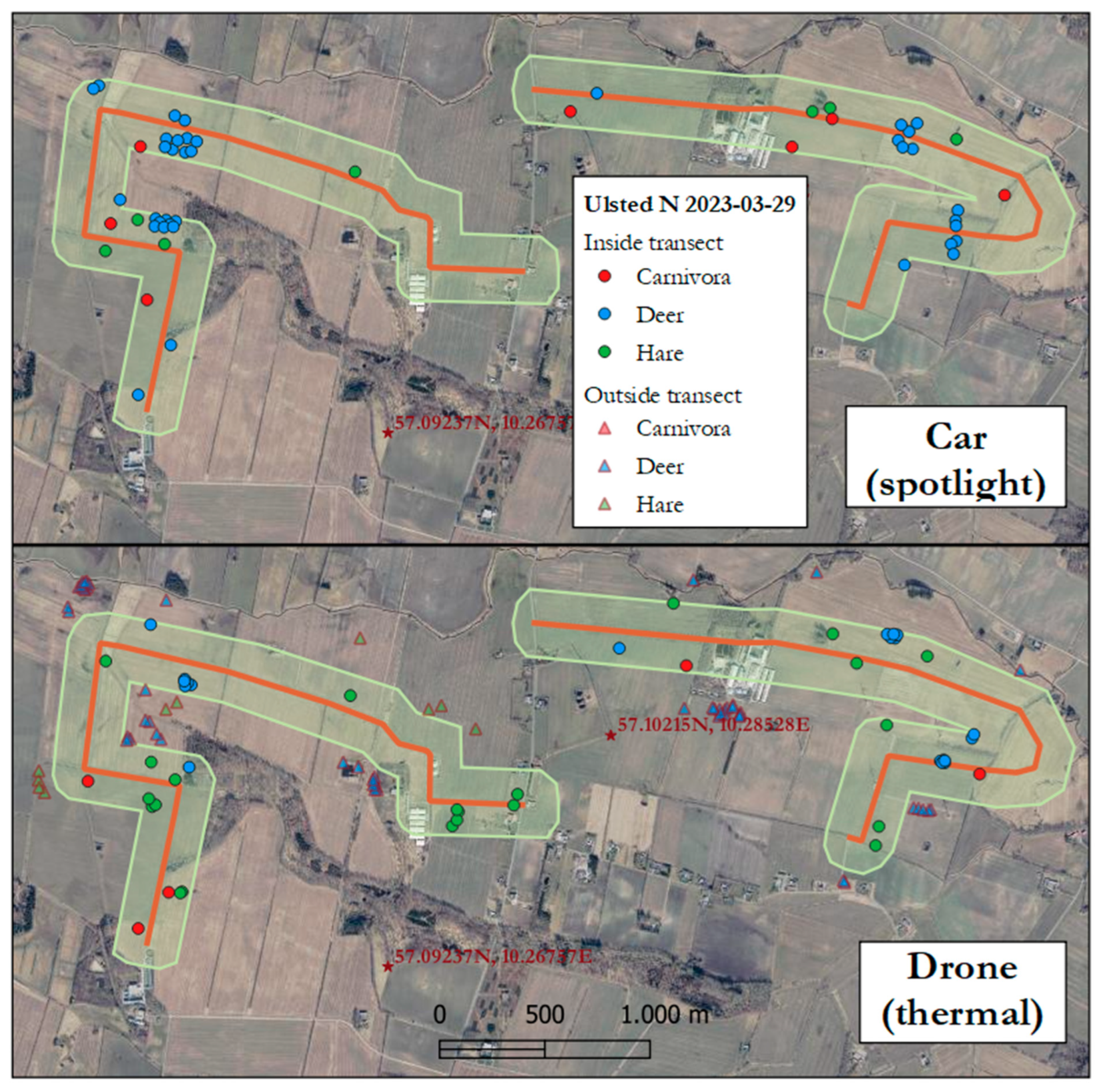
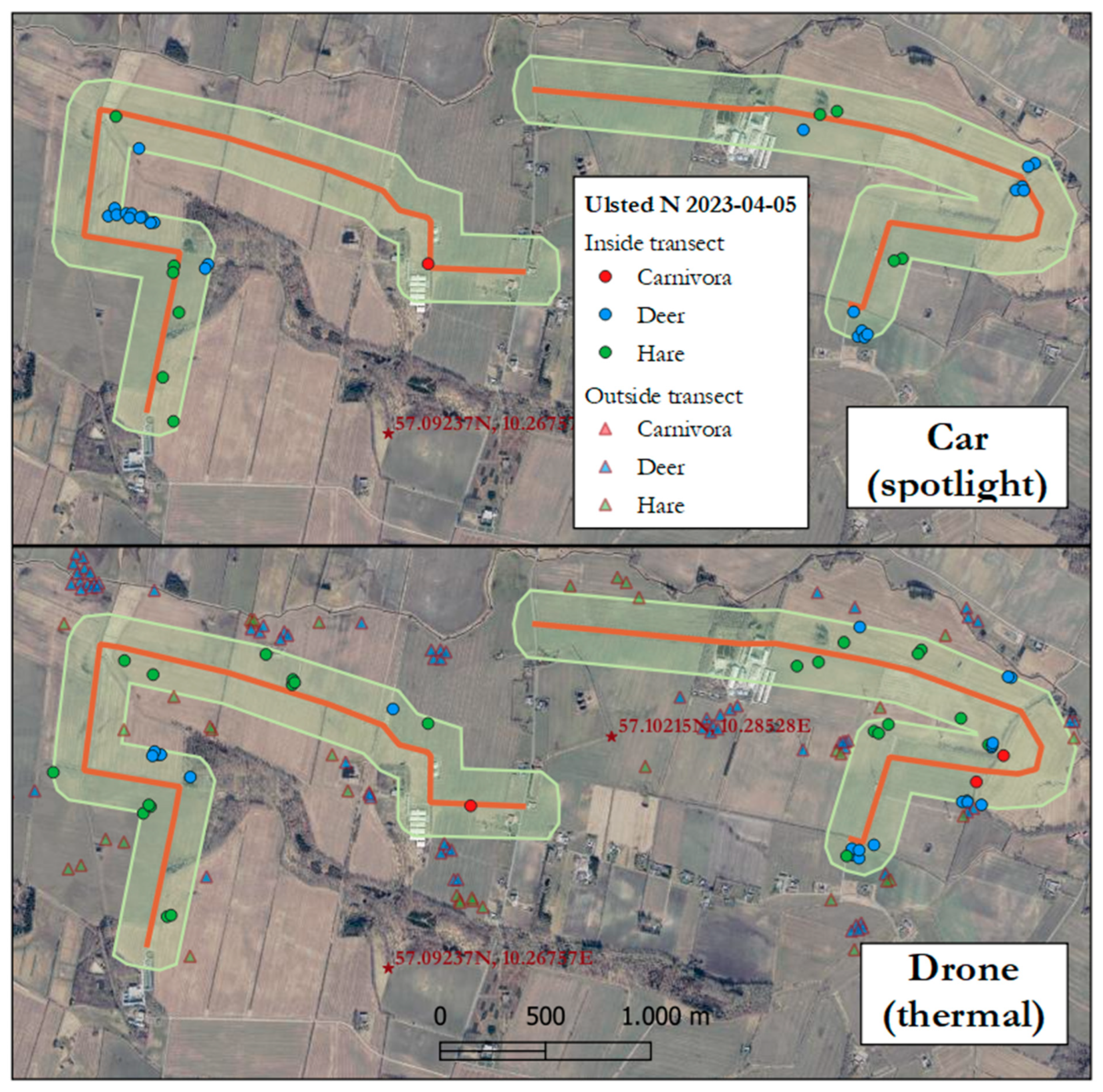
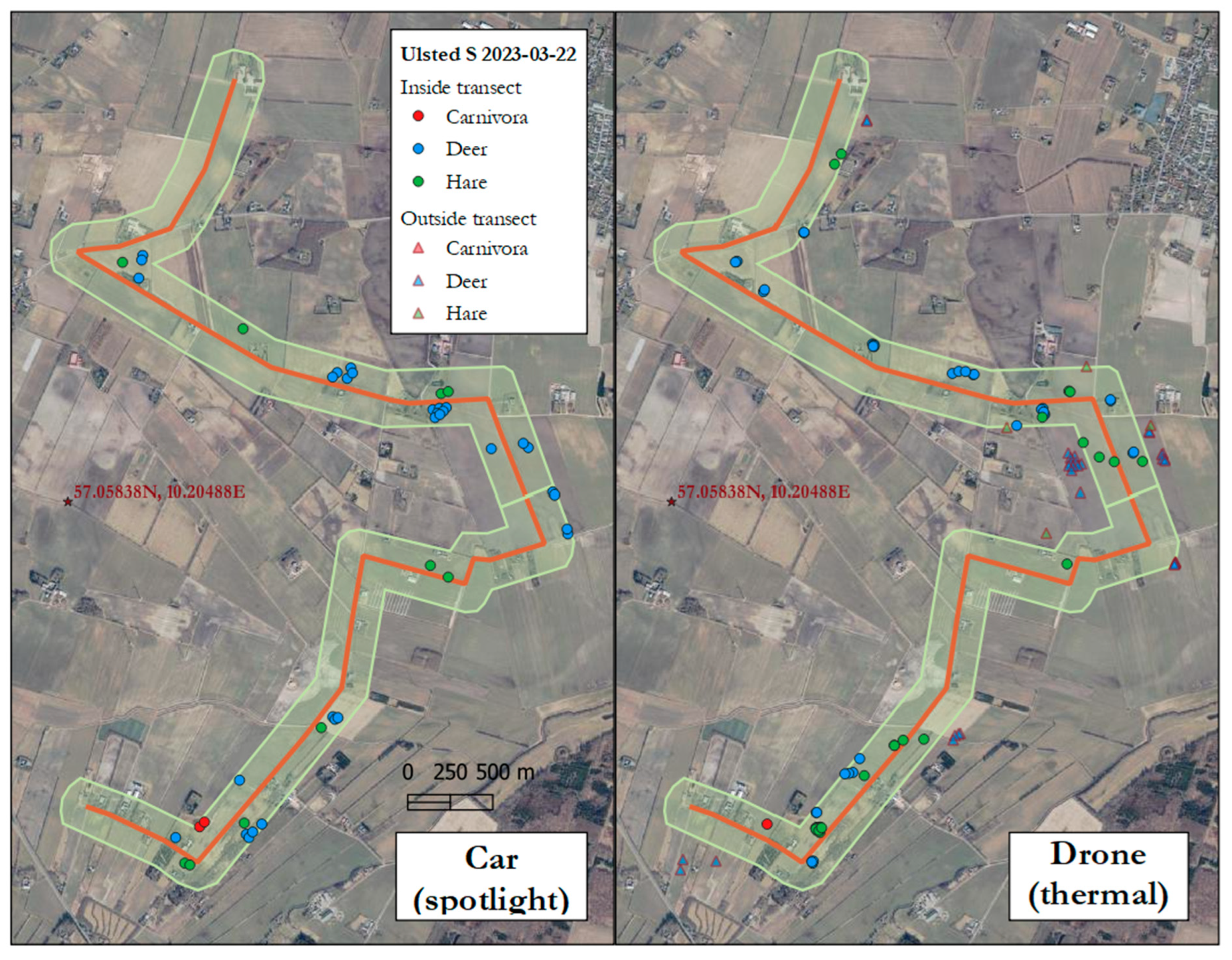
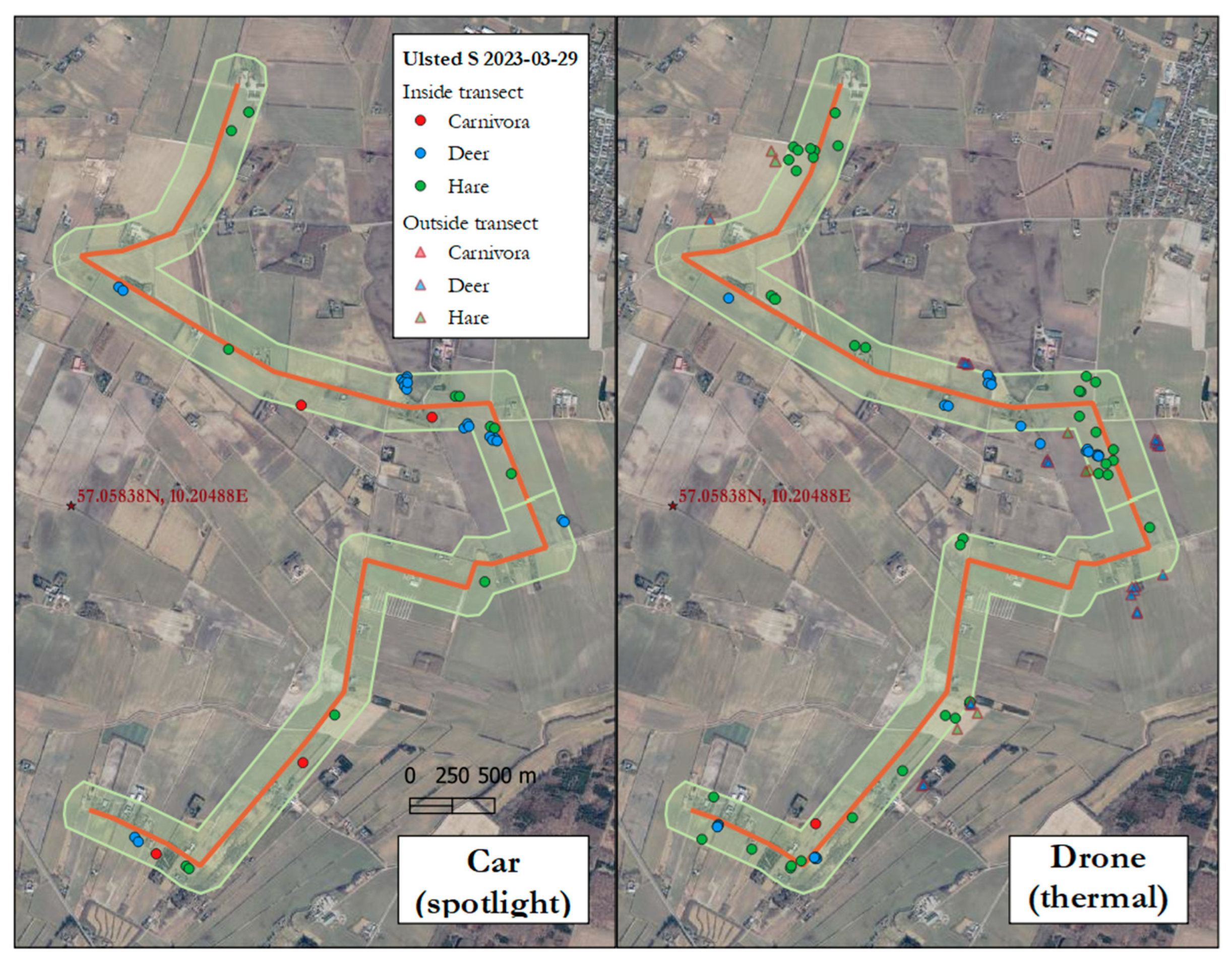
2.2. Scouring Transect Counts by Drone with Thermal Camera
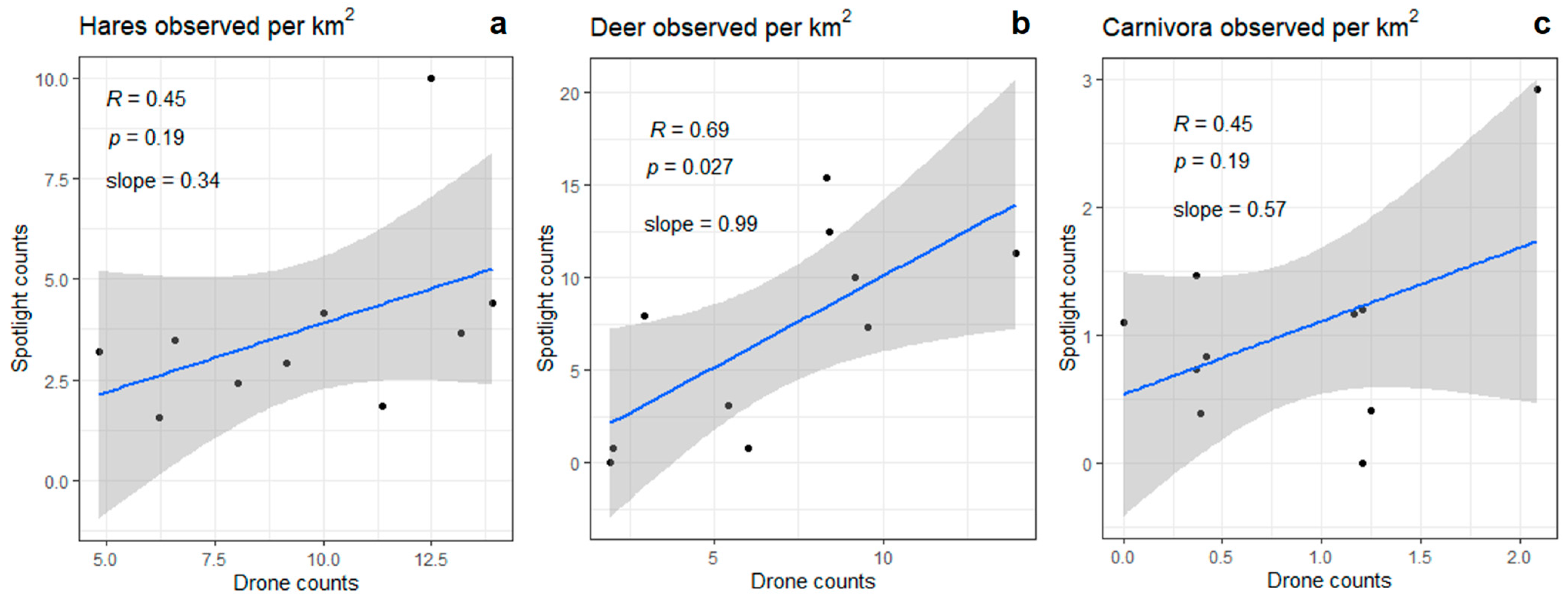
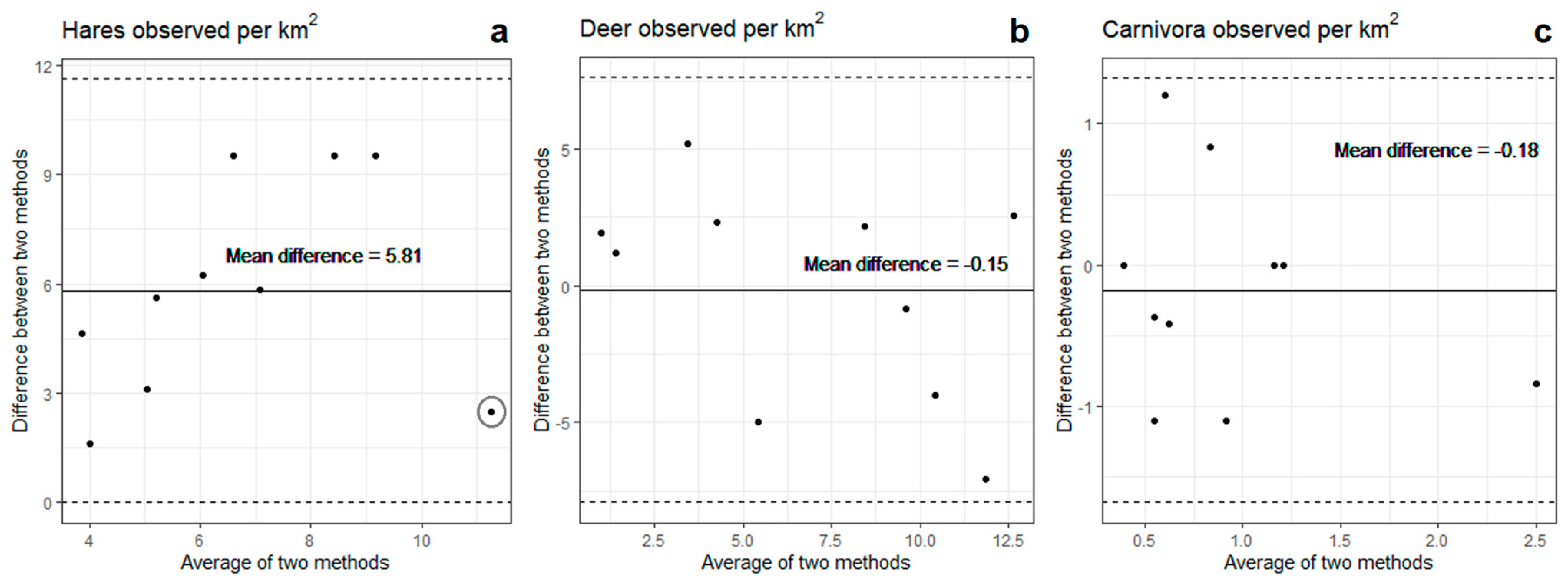
2.3. Statistical Analysis
3. Results
4. Discussion
4.1. Similar Studies
4.2. Limitations of this Study
4.3. Perspectives and Future Studies
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


References
- Allison, N.L.; Destefano, S. Equipment and Techniques for Nocturnal Wildlife Studies. Wildl. Soc. Bull. 2006, 34, 1036–1044. [Google Scholar] [CrossRef]
- Ruxton, G.D. Non-visual crypsis: A review of the empirical evidence for camouflage to senses other than vision. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 549–557. [Google Scholar] [CrossRef] [PubMed]
- Karp, D. Detecting small and cryptic animals by combining thermography and a wildlife detection dog. Sci. Rep. 2020, 10, 5220. [Google Scholar] [CrossRef] [PubMed]
- Jensen, T.W. Identifying Causes for Population Decline of the Brown Hare (Lepus Europaeus) in Agricultural Landscapes in Denmark. Ph.D. Thesis, Department of Wildlife Ecology and Biodiversity, NERI—National Environmental Research Institute, Aarhus University, Copenhagen, Denmark, Department of Population Biology, University of Copenhagen, KU, Copenhagen, Denmark, 2009. [Google Scholar]
- Sunde, P.; Asferg, T. Faglig Baggrund for Udarbejdelse af Forvaltningsplan, Fagligt Notat Fra DMU/AU, 65 s; Aarhus University: Aarhus, Denmark, 2011. [Google Scholar]
- Asferg, T.; Clausen, P.; Christensen, T.K.; Bregnballe, R.; Clausen, K.K.; Elmeros, M.; Fox, A.D.; Haugaard, L.; Holm, T.E.; Laursen, K.; et al. Vildtbestand og Jagttider i Danmark: Det Biologiske Grundlag for Jagttidsrevisionen 2018; DCE, Aarhus University: Aarhus, Denmark, 2016. [Google Scholar]
- Sørensen, I.H.; Midtgaard, L. Notat Vedr. Markvildtindsatsens Resultater 2013–2020. 2021. Available online: https://www.jaegerforbundet.dk/media/16606/210108-ihs-lmi-notat-markvildt.pdf (accessed on 27 April 2023).
- Ranta, E.; Lindström, J.; Lindén, H.; Helle, P. How reliable are harvesting data for analyses of spatio-temporal population dynamics. Oikos 2008, 117, 1461–1468. [Google Scholar] [CrossRef]
- Kahlert, J.; Fox, A.D.; Heldbjerg, H.; Asferg, T.; Sunde, P. Functional Responses of Human Hunters to Their Prey—Why Harvest Statistics may not Always Reflect Changes in Prey Population Abundance. Wildl. Biol. 2015, 21, 294–302. [Google Scholar] [CrossRef]
- Sliwinski, K.; Strauß, E.; Jung, K.; Siebert, U. Comparison of Spotlighting Monitoring Data of European Brown Hare (Lepus europaeus) Relative Population Densities with Infrared Thermography in Agricultural Landscapes in Northern Germany. PLoS ONE 2021, 16, e0254084. [Google Scholar] [CrossRef]
- Vikstrøm, T.; Eskildsen, D.P.; Jørgensen, M.F.; Ali, N.Y. Overvågning af de Almindelige Fuglearter i Danmark 1975–2021. In Årsrapport for Punkttællings-Programmet; Dansk Ornitologisk Forening: København, Danmark, 2022. [Google Scholar]
- Vejledning: Pattedyrstællinger. Available online: https://www.jaegerforbundet.dk/media/19412/t%C3%A6llevejledning_pattedyr_rev_2022.pdf (accessed on 27 April 2023).
- Langbein, J.; Hutchings, M.R.; Harris, S.; Stoate, C.; Tapper, S.C.; Wray, S. Techniques for assessing the abundance of Brown Hares Lepus europaeus. Mammal Rev. 1999, 29, 93–116. [Google Scholar] [CrossRef]
- Zellweger-Fischer, J.; Kéry, M.; Pasinelli, G. Population trends of brown hares in Switzerland: The role of land-use and ecological compensation areas. Biol. Conserv. 2011, 144, 1364–1373. [Google Scholar] [CrossRef]
- Bedson, C.P.E.; Thomas, L.; Wheeler, P.M.; Reid, N.; Harris, W.E.; Lloyd, H.; Mallon, D.; Preziosi, R. Estimating Density of Mountain Hares Using Distance Sampling: A Comparison of Daylight Visual Surveys, Night-Time Thermal Imaging and Camera Traps. Wildl. Biol. 2021, 2021, wlb-00802. [Google Scholar] [CrossRef]
- Forsyth, D.M.; Comte, S.; Davis, N.E.; Bengsen, A.J.; Côté, S.D.; Hewitt, D.G.; Morellet, N.; Mysterud, A. Methodology Matters When Estimating Deer Abundance: A Global Systematic Review and Recommendations for Improvements. J. Wildl. Manag. 2022, 86, e22207. [Google Scholar] [CrossRef]
- Buckland, S.T.; Rexstad, E.A.; Marques, T.A.; Oedekoven, C.S. Distance Sampling: Methods and Applications; Springer International Publishing: Cham, Switzerland, 2015; pp. 3–12. [Google Scholar]
- Buckland, S.T.; Plumptre, A.J.; Thomas, L.; Rexstad, E.A. Line Transect Sampling of Primates: Can Animal-to-Observer Distance Methods Work. Int. J. Primatol. 2010, 31, 485–499. [Google Scholar] [CrossRef]
- Knights, K.; McCarthy, M.A.; Camac, J.; Guillera-Arroita, G. Efficient effort allocation in line-transect distance sampling of high-density species: When to walk further, measure less-often and gain precision. Methods Ecol. Evol. 2021, 12, 962–970. [Google Scholar] [CrossRef]
- Focardi, S.; De Marinis, A.M.; Rizzotto, M.; Pucci, A. Comparative Evaluation of Thermal Infrared Imaging and Spotlighting to Survey Wildlife. Wildl. Soc. B 2001, 29, 133–139. [Google Scholar]
- Rahman, D.A.; Rahman, A.A.A.F. Performance of unmanned aerial vehicle with thermal imaging, camera trap, and transect survey for monitoring of wildlife. IOP Conf. Ser. Earth Environ. Sci. 2021, 771, 12011. [Google Scholar] [CrossRef]
- Tomljanovic, K.; Kolar, A.; Duka, A.; Franjevic, M.; Jurjevic, L.; Matak, I.; Ugarkovic, D.; Balenovic, I. Application of UAS for Monitoring of Forest Ecosystems—A Review of Experience and Knowledge. Croat. J. For. Eng. 2022, 43, 487–504. [Google Scholar] [CrossRef]
- Dronova, I.; Kislik, C.; Dinh, Z.; Kelly, M. A Review of Unoccupied Aerial Vehicle Use in Wetland Applications: Emerging Opportunities in Approach, Technology, and Data. Drones 2021, 5, 45. [Google Scholar] [CrossRef]
- Povlsen, P.; Linder, A.C.; Larsen, H.L.; Durdevic, P.; Arroyo, D.O.; Bruhn, D.; Pertoldi, C.; Pagh, S. Using Drones with Thermal Imaging to Estimate Population Counts of European Hare (Lepus europaeus) in Denmark. Drones 2023, 7, 5. [Google Scholar] [CrossRef]
- Christie, K.S.; Sophie, L.G.; Casey, L.B.; Hatfield, M.; Hanson, L. Unmanned aircraft systems in wildlife research: Current and future applications of a transformative technology. Front. Ecol. Environ. 2016, 14, 241–251. [Google Scholar] [CrossRef]
- Hyun, C.; Park, M.; Lee, W.Y. Remotely Piloted Aircraft System (RPAS)-Based Wildlife Detection: A Review and Case Studies in Maritime Antarctica. Animals 2020, 10, 2387. [Google Scholar] [CrossRef]
- Linchant, J.; Lejeune, P.; Quevauvillers, S.; Vermeulen, C.; Brostaux, Y.; Lhoest, S.; Michez, A. Evaluation of an Innovative Rosette Flight Plan Design for Wildlife Aerial Surveys with UAS. Drones 2023, 7, 208. [Google Scholar] [CrossRef]
- Lyu, X.; Li, X.; Dang, D.; Dou, H.; Wang, K.; Lou, A. Unmanned Aerial Vehicle (UAV) Remote Sensing in Grassland Ecosystem Monitoring: A Systematic Review. Remote Sens. 2022, 14, 1096. [Google Scholar] [CrossRef]
- Robinson, J.M.; Harrison, P.A.; Mavoa, S.; Breed, M.F. Existing and emerging uses of drones in restoration ecology. Methods Ecol. Evol. 2022, 13, 1899–1911. [Google Scholar] [CrossRef]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mammal Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Howell, L.G.; Clulow, J.; Jordan, N.R.; Beranek, C.T.; Ryan, S.A.; Roff, A.; Witt, R.R. Drone Thermal Imaging Technology Provides a Cost-Effective Tool for Landscape-Scale Monitoring of a Cryptic Forest-Dwelling Species across All Population Densities. Wildl. Res. 2021, 49, 66–78. [Google Scholar] [CrossRef]
- Witt, R.R.; Beranek, C.T.; Howell, L.G.; Ryan, S.A.; Clulow, J.; Jordan, N.R.; Denholm, B.; Roff, A. Real-time drone derived thermal imagery outperforms traditional survey methods for an arboreal forest mammal. PLoS ONE 2020, 15, e0242204. [Google Scholar] [CrossRef]
- Corcoran, E.; Winsen, M.; Sudholz, A.; Hamilton, G. Automated Detection of Wildlife Using Drones: Synthesis, Opportunities and Constraints. Methods Ecol. Evol. 2021, 12, 1103–1114. [Google Scholar] [CrossRef]
- Winsen, M.; Denman, S.; Corcoran, E.; Hamilton, G. Automated Detection of Koalas with Deep Learning Ensembles. Remote Sens. 2022, 14, 2432. [Google Scholar] [CrossRef]
- Whitworth, A.; Pinto, C.; Ortiz, J.; Flatt, E.; Silman, M. Flight speed and time of day heavily influence rainforest canopy wildlife counts from drone-mounted thermal camera surveys. Biodivers. Conserv. 2022, 31, 3179–3195. [Google Scholar] [CrossRef]
- Shewring, M.P.; Vafidis, J.O. Using UAV-mounted Thermal Cameras to Detect the Presence of Nesting Nightjar in Upland Clear-fell: A Case Study in South Wales, UK. Ecol. Solut. Evid. 2021, 2, e12052. [Google Scholar] [CrossRef]
- Seymour, A.C.; Dale, J.; Hammill, M.; Halpin, P.N.; Johnston, D.W. Automated Detection and Enumeration of Marine Wildlife Using Unmanned Aircraft Systems (UAS) and Thermal Imagery. Sci. Rep. 2017, 7, 45127. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, C.; Turvey, S.T.; Sun, Z.; Tan, Z.; Yang, Q.; Long, W.; Wu, X.; Yang, D. Thermal infrared imaging from drones can detect individuals and nocturnal behavior of the world’s rarest primate. Glob. Ecol. Conserv. 2020, 23, e01101. [Google Scholar] [CrossRef]
- Burke, C.; Rashman, M.; Wich, S.; Symons, A.; Theron, C.; Longmore, S. Optimizing Observing Strategies for Monitoring Animals Using Drone-Mounted Thermal Infrared Cameras. Int. J. Remote Sens. 2019, 40, 439–467. [Google Scholar] [CrossRef]
- Sunde, P.; Jessen, L. It Counts Who Counts: An Experimental Evaluation of the Importance of Observer Effects on Spotlight Count Estimates. Eur. J. Wildl. Res. 2013, 59, 645–653. [Google Scholar] [CrossRef]
- DJI Matrice 300RTK. Available online: https://www.dji.com/dk/matrice-300 (accessed on 27 April 2023).
- Droneregler.dk. Available online: Droneregler.dk (accessed on 27 April 2023).
- McShea, W.J.; Stewart, C.M.; Kearns, L.; Bates, S. Road bias for deer density estimates at 2 national parks in Maryland. Wildl. Soc. Bull. 2011, 35, 177–184. [Google Scholar] [CrossRef]
- Schad, L.; Fischer, J. Opportunities and risks in the use of drones for studying animal behaviour. Methods Ecol. Evol. 2022, 14, 1864–1872. [Google Scholar] [CrossRef]
- Corcoran, E.; Denman, S.; Hamilton, G. Evaluating New Technology for Biodiversity Monitoring: Are Drone Surveys Biased? Ecol. Evol. 2021, 11, 6649–6656. [Google Scholar] [CrossRef] [PubMed]
- Corcoran, E.; Denman, S.; Hanger, J.; Wilson, B.; Hamilton, G. Automated detection of koalas using low-level aerial surveillance and machine learning. Sci. Rep. 2019, 9, 3208. [Google Scholar] [CrossRef]
- Beaver, J.T.; Baldwin, R.W.; Messinger, M.; Newbolt, C.H.; Ditchkoff, S.S.; Silman, M.R. Evaluating the Use of Drones Equipped with Thermal Sensors as an Effective Method for Estimating Wildlife. Wildl. Soc. Bull. 2020, 44, 434–443. [Google Scholar] [CrossRef]
- Edwards, H.H.; Hostetler, J.A.; Stith, B.M.; Martin, J. Monitoring abundance of aggregated animals (Florida manatees) using an unmanned aerial system (UAS). Sci. Rep. 2021, 11, 12920. [Google Scholar] [CrossRef]
- Piel, A.K.; Crunchant, A.; Knot, I.E.; Chalmers, C.; Fergus, P.; Mulero-Pázmány, M.; Wich, S.A. Noninvasive Technologies for Primate Conservation in the 21st Century. Int. J. Primatol. 2022, 43, 133–167. [Google Scholar] [CrossRef]
- Psiroukis, V.; Malounas, I.; Mylonas, N.; Grivakis, K.; Fountas, S.; Hadjigeorgiou, I. Monitoring of free-range rabbits using aerial thermal imaging. Smart Agric. Technol. 2021, 1, 100002. [Google Scholar] [CrossRef]
- Cline, E.E.; Gehring, T.M.; Etter, D.R. Evaluating unoccupied aerial vehicles for estimating relative abundance of muskrats. Wildl. Soc. B 2022, 46, e1306. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Place | Temperature | Weather Conditions |
|---|---|---|---|
| 15 March 2023 | Ingstrup–Stenum | 0 °C | Clear to cloudy sky |
| 22 March 2023 | Ulsted | 5 °C | Cloudy |
| 29 March 2023 | Ulsted | 2 °C | Light rain, fog, poor visibility |
| 5 April 2023 | Ulsted | 3 °C | Clear sky, moonlight; rain and sleet later in the night |
| 9 April 2023 | Ingstrup–Stenum | 7 °C | Clear sky |
| Location | Date | Area km2 | Drone Hare Obs. | Spotlight Hare Obs. | Difference | Drone Hares per km2 | Spotlight Hares per km2 |
|---|---|---|---|---|---|---|---|
| Ulsted_N | 22 March 2023 | 2.4 | 30 | 24 | 6 | 12.5 | 10.0 |
| Ulsted_S | 22 March 2023 | 2.7 | 36 | 10 | 26 | 13.3 | 3.7 |
| Ulsted_N | 29 March 2023 | 2.4 | 22 | 7 | 15 | 9.2 | 2.9 |
| Ulsted_S | 29 March 2023 | 2.7 | 38 | 12 | 26 | 14.1 | 4.4 |
| Ulsted_N | 5 April 2023 | 2.4 | 24 | 10 | 14 | 10.0 | 4.2 |
| Ulsted_S | 5 April 2023 | 2.7 | 31 | 5 | 26 | 11.5 | 1.9 |
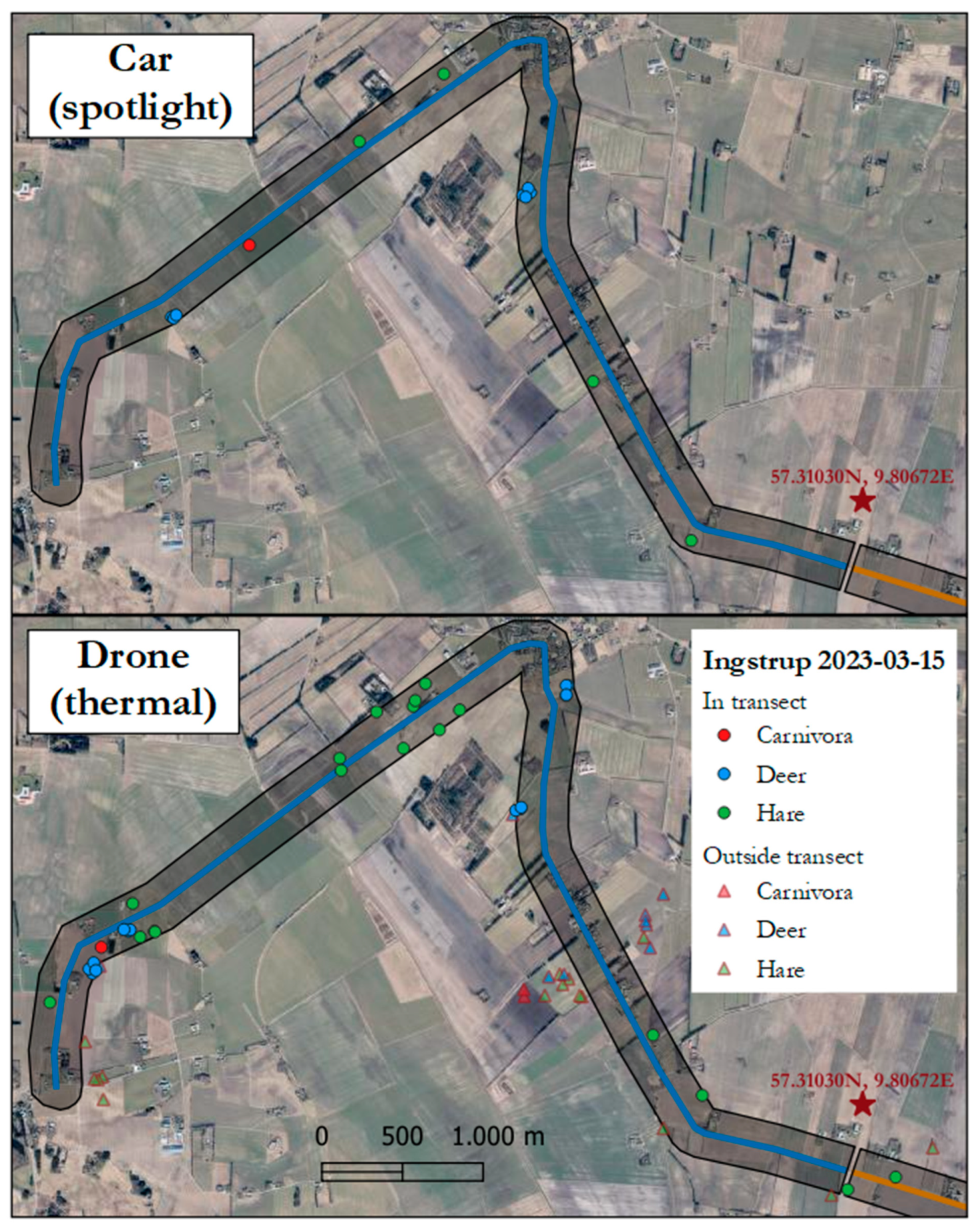
| Ingstrup | 15 March 2023 | 2.6 | 16 | 4 | 12 | 6.2 | 1.5 |
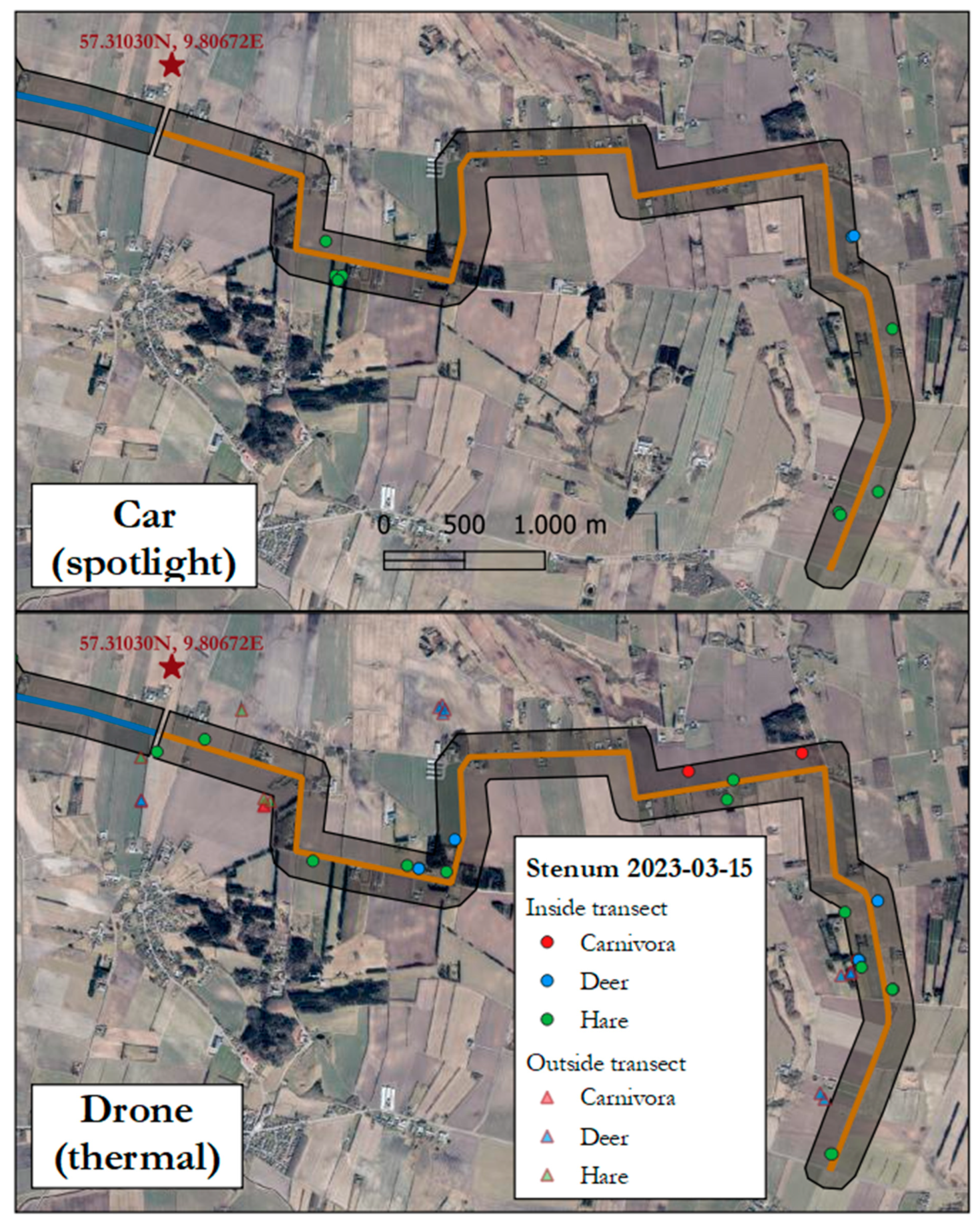
| Stenum | 15 March 2023 | 2.5 | 12 | 8 | 4 | 4.8 | 3.2 |
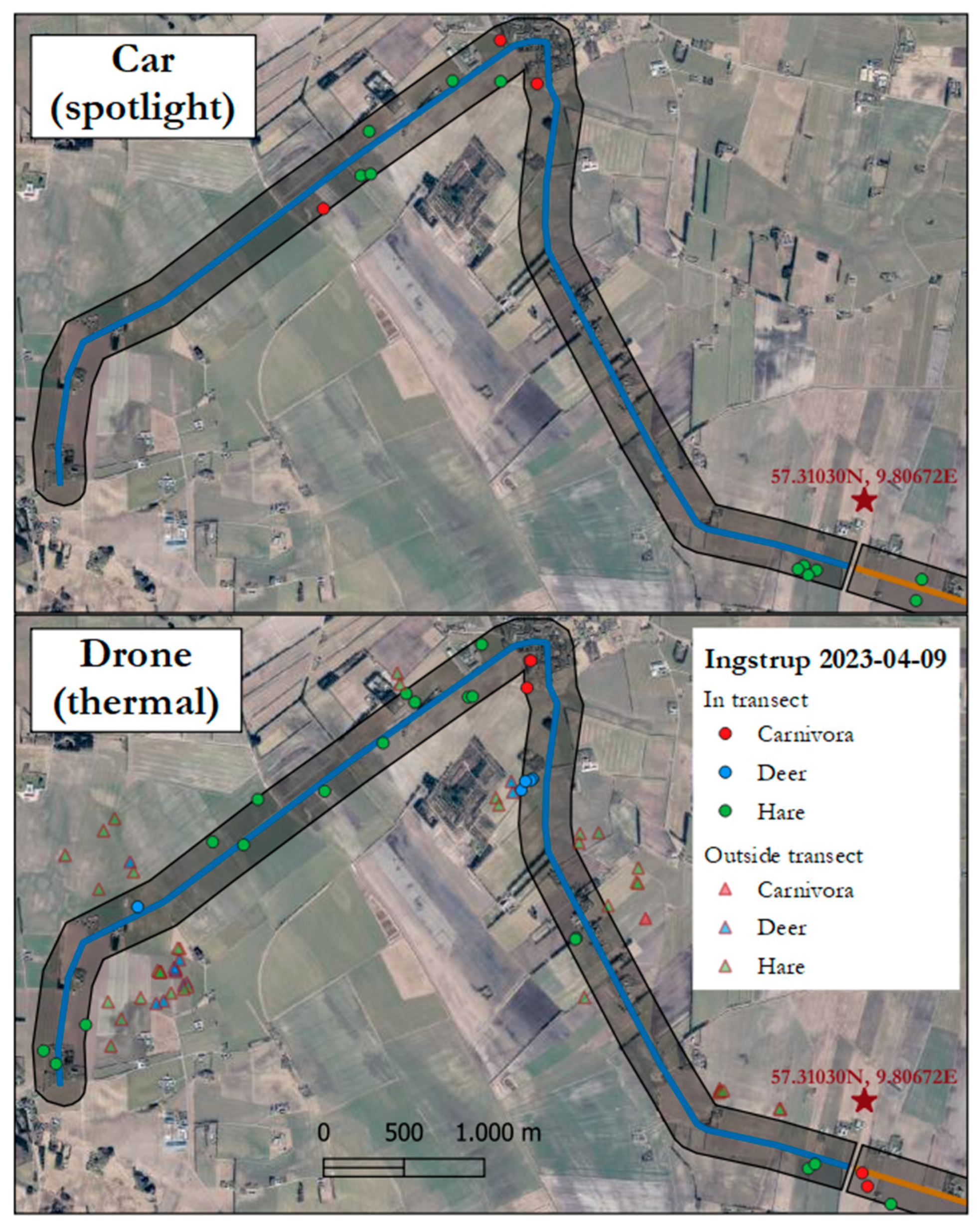
| Ingstrup | 9 April 2023 | 2.6 | 17 | 9 | 8 | 6.5 | 3.5 |
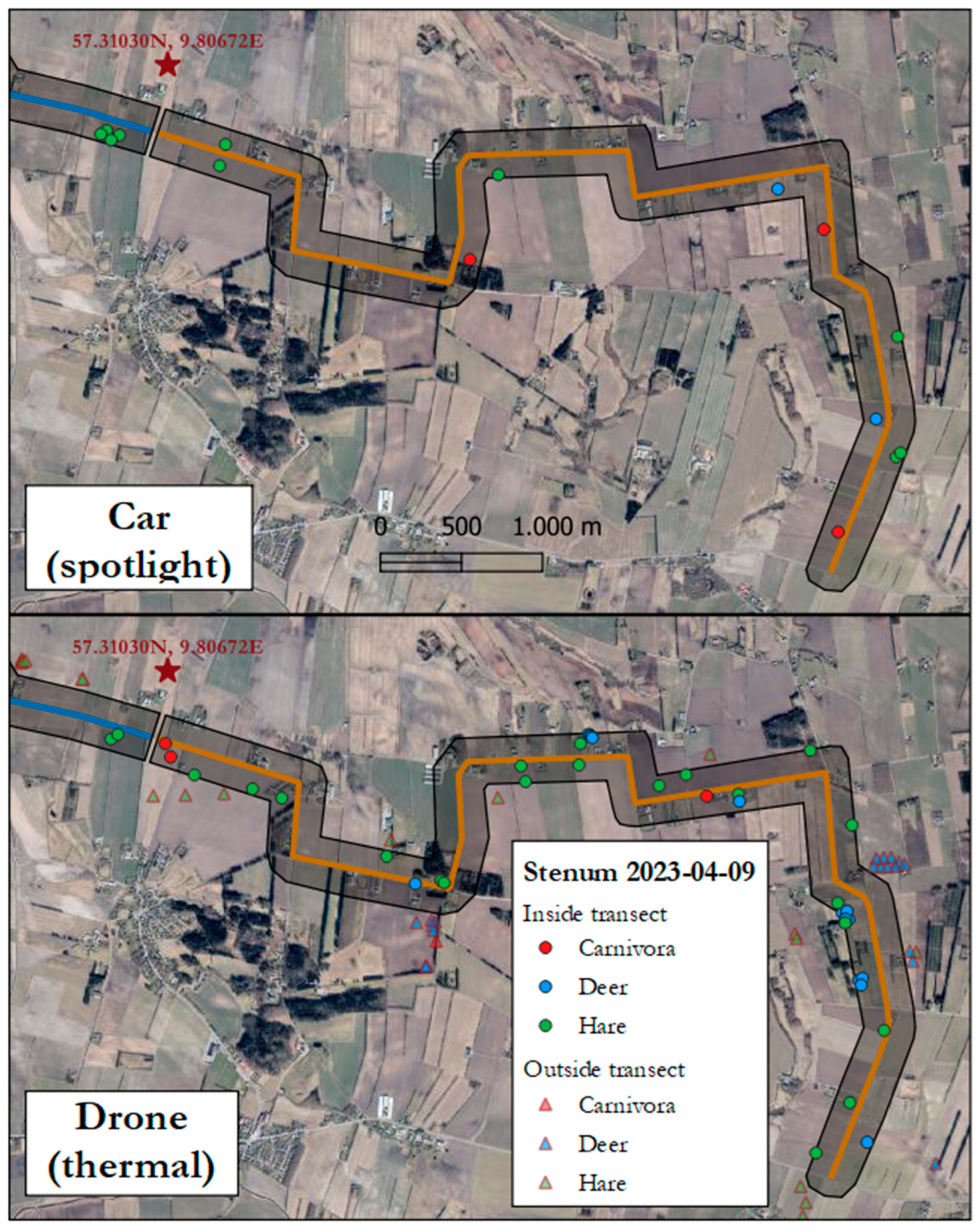
| Stenum | 9 April 2023 | 2.5 | 20 | 6 | 14 | 8.0 | 2.4 |
| Location | Date | Area km2 | Drone Deer Obs. | Spotlight Deer Obs. | Difference | Drone Deer per km2 | Spotlight Deer per km2 |
|---|---|---|---|---|---|---|---|
| Ulsted_N | 22 March 2023 | 2.4 | 7 | 19 | −12 | 2.9 | 7.9 |
| Ulsted_S | 22 March 2023 | 2.7 | 38 | 31 | 7 | 14.1 | 11.5 |
| Ulsted_N | 29 March 2023 | 2.4 | 20 | 37 | −17 | 8.3 | 15.4 |
| Ulsted_S | 29 March 2023 | 2.7 | 26 | 20 | 6 | 9.6 | 7.4 |
| Ulsted_N | 5 April 2023 | 2.4 | 22 | 24 | −2 | 9.2 | 10.0 |
| Ulsted_S | 5 April 2023 | 2.7 | 23 | 34 | −11 | 8.5 | 12.6 |
| Ingstrup | 15 March 2023 | 2.6 | 14 | 8 | 6 | 5.4 | 3.1 |
| Stenum | 15 March 2023 | 2.5 | 5 | 2 | 3 | 2.0 | 0.8 |
| Ingstrup | 9 April 2023 | 2.6 | 5 | 0 | 5 | 1.9 | 0.0 |
| Stenum | 9 April 2023 | 2.5 | 15 | 2 | 13 | 6.0 | 0.8 |
| Location | Date | Area km2 | Drone Carn. Obs. | Spotlight Carn. Obs. | Difference | Drone Carn. per km2 | Spotlight Carn. per km2 |
|---|---|---|---|---|---|---|---|
| Ulsted_N | 22 March 2023 | 2.4 | 1 | 2 | −1 | 0.4 | 0.8 |
| Ulsted_S | 22 March 2023 | 2.7 | 1 | 2 | −1 | 0.4 | 0.7 |
| Ulsted_N | 29 March 2023 | 2.4 | 5 | 7 | −2 | 2.1 | 2.9 |
| Ulsted_S | 29 March 2023 | 2.7 | 1 | 4 | −3 | 0.4 | 1.5 |
| Ulsted_N | 5 April 2023 | 2.4 | 3 | 1 | 2 | 1.3 | 0.4 |
| Ulsted_S | 5 April 2023 | 2.7 | 0 | 3 | −3 | 0.0 | 1.1 |
| Ingstrup | 15 March 2023 | 2.6 | 1 | 1 | 0 | 0.4 | 0.4 |
| Stenum | 15 March 2023 | 2.5 | 3 | 0 | 3 | 1.2 | 0.0 |
| Ingstrup | 9 April 2023 | 2.6 | 3 | 3 | 0 | 1.2 | 1.2 |
| Stenum | 9 April 2023 | 2.5 | 3 | 3 | 0 | 1.2 | 1.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Povlsen, P.; Bruhn, D.; Pertoldi, C.; Pagh, S. A Novel Scouring Method to Monitor Nocturnal Mammals Using Uncrewed Aerial Vehicles and Thermal Cameras—A Comparison to Line Transect Spotlight Counts. Drones 2023, 7, 661. https://doi.org/10.3390/drones7110661
Povlsen P, Bruhn D, Pertoldi C, Pagh S. A Novel Scouring Method to Monitor Nocturnal Mammals Using Uncrewed Aerial Vehicles and Thermal Cameras—A Comparison to Line Transect Spotlight Counts. Drones. 2023; 7(11):661. https://doi.org/10.3390/drones7110661
Chicago/Turabian StylePovlsen, Peter, Dan Bruhn, Cino Pertoldi, and Sussie Pagh. 2023. "A Novel Scouring Method to Monitor Nocturnal Mammals Using Uncrewed Aerial Vehicles and Thermal Cameras—A Comparison to Line Transect Spotlight Counts" Drones 7, no. 11: 661. https://doi.org/10.3390/drones7110661
APA StylePovlsen, P., Bruhn, D., Pertoldi, C., & Pagh, S. (2023). A Novel Scouring Method to Monitor Nocturnal Mammals Using Uncrewed Aerial Vehicles and Thermal Cameras—A Comparison to Line Transect Spotlight Counts. Drones, 7(11), 661. https://doi.org/10.3390/drones7110661