
Development of a Real-Time Vespa velutina Nest Detection and Notification System Using Artificial Intelligence in Drones

 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. System
2.2. Data
Training Data Acquisition and Preprocessing
2.3. Artificial Intelligence Model Training
2.4. Model Learning Evaluation
2.4.1. Training
2.4.2. Evaluating Confusion Matrix Performance
2.5. DataBase and Web Server
3. Results
3.1. Artificial Intelligence Training Result
3.1.1. Training Graph
3.1.2. Validation
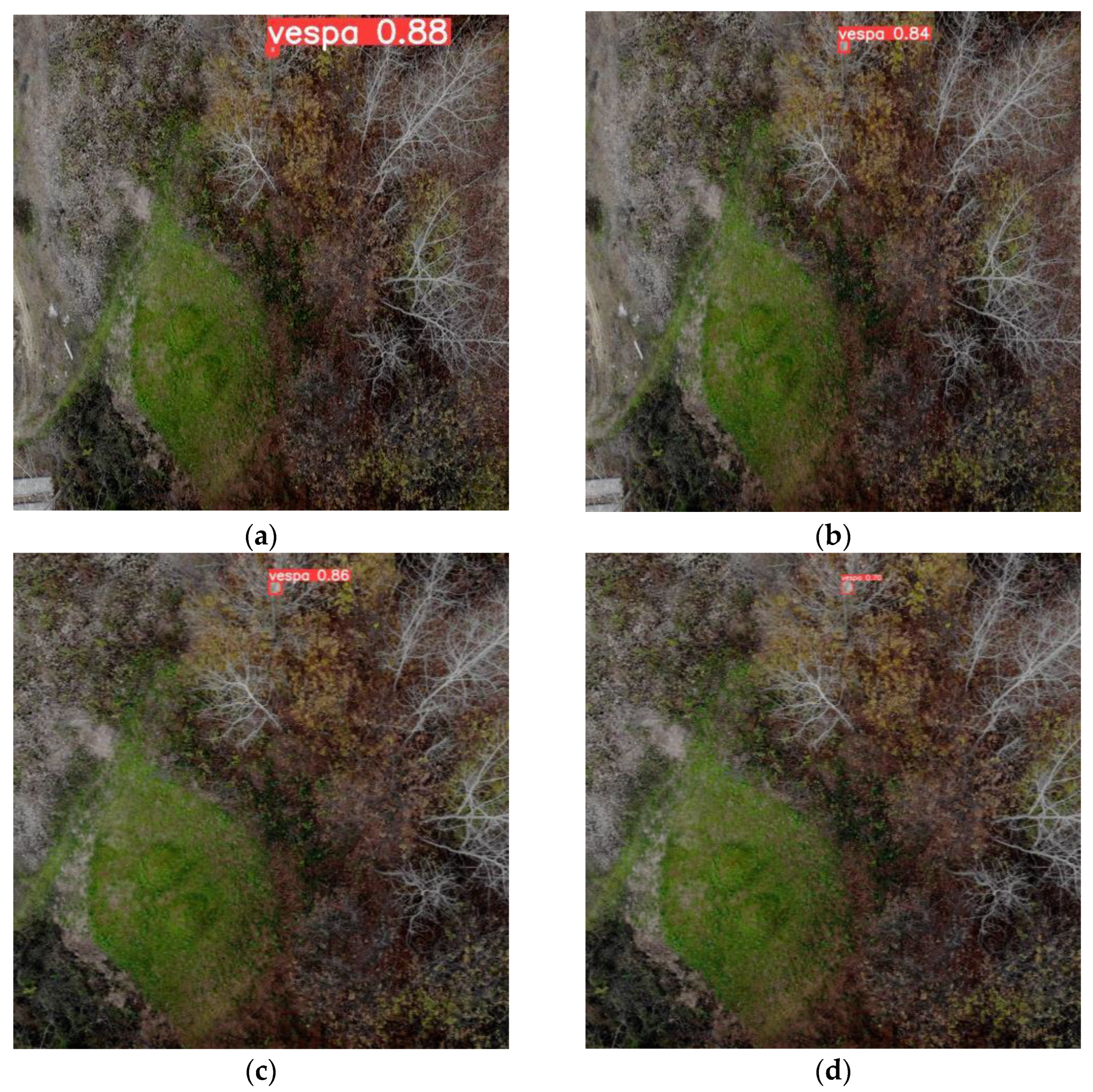
3.1.3. Selection of the Artificial Intelligence Model Used in the Drone System
3.2. DataBase and Web Site
3.3. Demonstration of the V. velutina Nest Real-Time Detection System in Drones
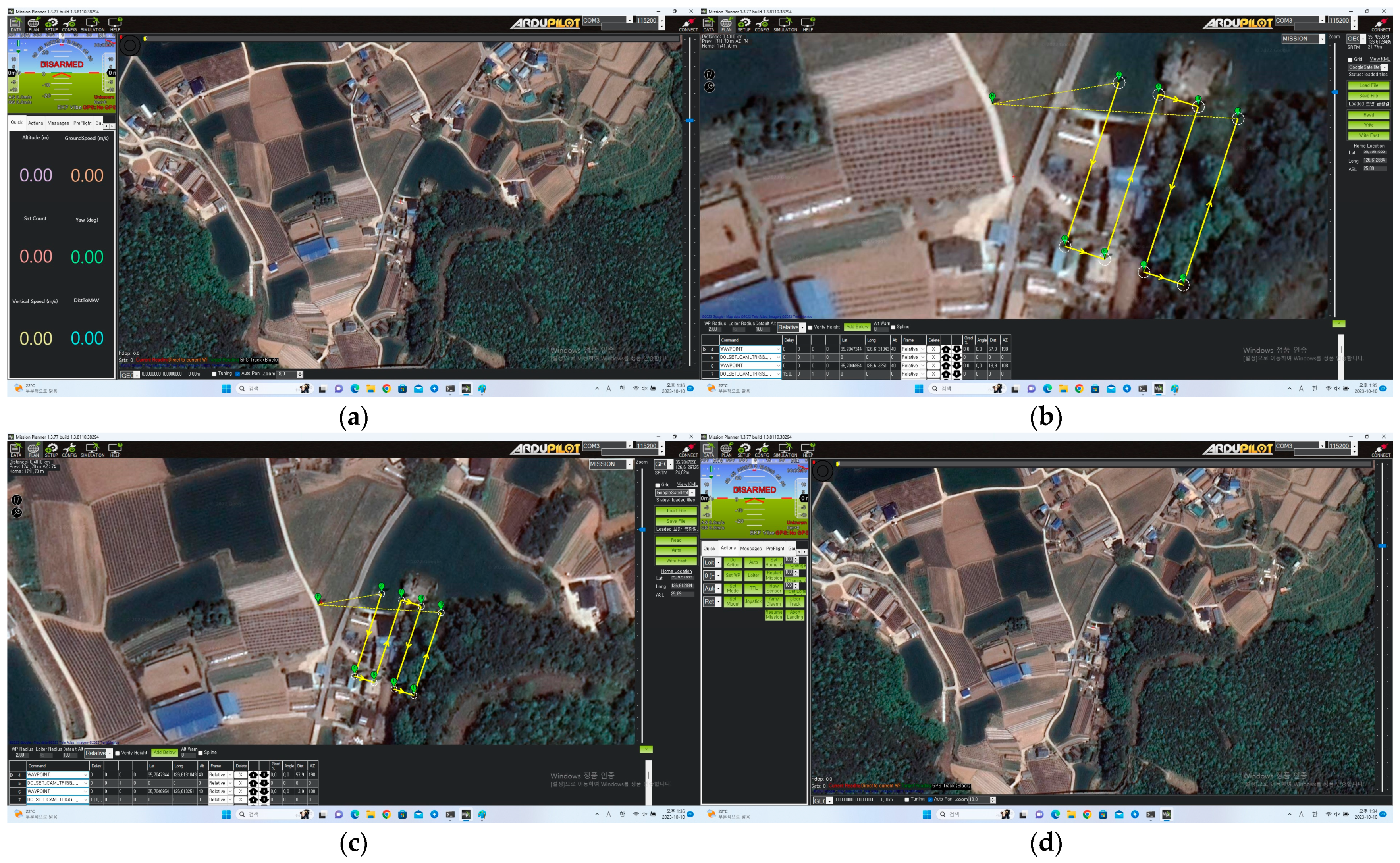
3.3.1. Routed Detection Flight Settings
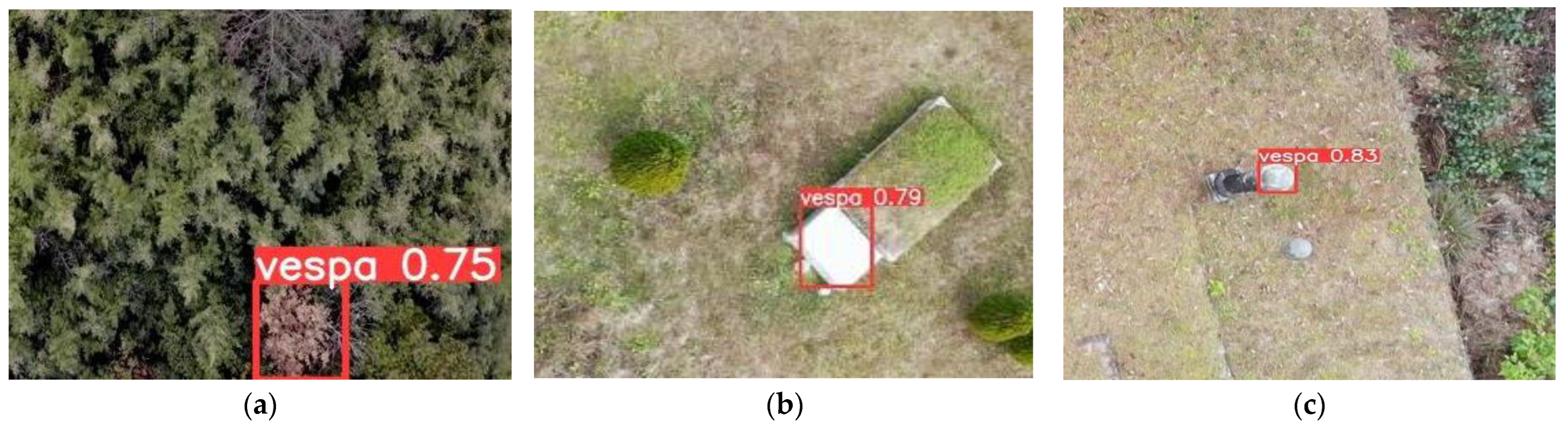
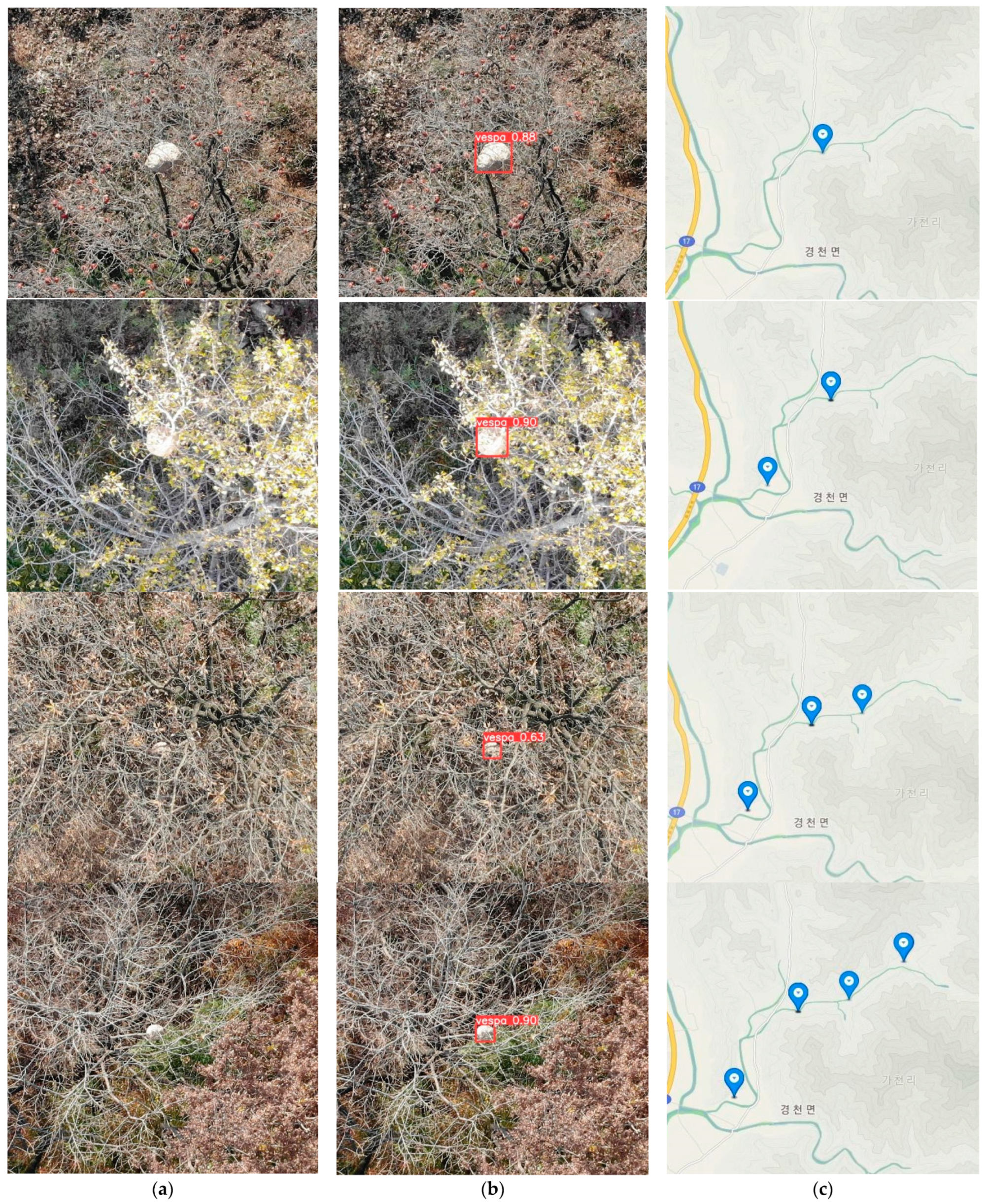
3.3.2. Demonstration Detection Flight
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jung, C.E.; Kang, Y.R.; Oh, H.A.; Bak, S.; Hong, D.; Kwon, S. Bee Crisis and Protection Policy Proposal. Greenpeace 2023, 59. [Google Scholar]
- Kay, A.D.; Bruning, A.J.; van Alst, A.; Abrahamson, T.T.; Hughes, W.O.H.; Kaspari, M. A carbohydrate-rich diet increases social immunity in ants. Proc. R. Soc. B Boil. Sci. 2014, 281, 20132374. [Google Scholar] [CrossRef]
- Jung, C.E.; Kang, M.S.; Kim, D.W.; Lee, H.S. Vespid wasps (Hymenoptera) occurring around apiaries in Andong, Korea I. Taxonomy and life history. Korean J. Apic. 2007, 22, 53–62. [Google Scholar]
- Jung, C.E.; Kang, M.S.; Kim, D.W.; Lee, H.S. Vespid wasps (Hymenoptera) occurring around apiaries in Andong, Korea II. Taxonomy and life history. Korean J. Apic. 2007, 22, 63–70. [Google Scholar]
- Jung, C.E. Initial stage risk assessment of an invasive hornet, Vespa velutina nigrithorax Buysson (Hymenoptera: Vespidae) in Korea. Korean J. Apic. 2012, 27, 95–104. [Google Scholar]
- Sim, H.; Lee, M.L.; Choi, Y.S.; Kim, H.Y.; Hong, I.P.; Woo, S.O.; Byen, K.U.; Lee, M.Y. Pattern of Emergence of Vespa velutina nigrithorax Buysson (Hymenoptera: Vespidae) on Spring in South Part of Korea. J. Apic. 2014, 29, 353–358. [Google Scholar] [CrossRef]
- Abrol, D.P. Ecology, behaviour and management of social wasp, Vespa velutina Smith (Hymenoptera: Vespidae), attacking honeybee colonies. Korean J. Apic. 1994, 9, 5–10. [Google Scholar]
- Herrera, C.; Williams, M.; Encarnação, J.; Roura-Pascual, N.; Faulhaber, B.; Jurado-Rivera, J.A.; Leza, M. Automated detection of the yellow-legged hornet (Vespa velutina) using an optical sensor with machine learning. Pest Manag. Sci. 2023, 79, 1225–1233. [Google Scholar] [CrossRef]
- Jeon, M.-S.; Jeong, Y.; Lee, J.; Yu, S.-H.; Kim, S.-B.; Kim, D.; Kim, K.-C.; Lee, S.; Lee, C.-W.; Choi, I. Deep Learning-Based Portable Image Analysis System for Real-Time Detection of Vespa velutina. Appl. Sci. 2023, 13, 7414. [Google Scholar] [CrossRef]
- Gao, P.; Lee, K.; Kuswidiyanto, L.W.; Yu, S.-H.; Hu, K.; Liang, G.; Chen, Y.; Wang, W.; Liao, F.; Jeong, Y.S.; et al. Dynamic Beehive Detection and Tracking System Based on YOLO V5 and Unmanned Aerial Vehicle. J. Biosyst. Eng. 2022, 47, 510–520. [Google Scholar] [CrossRef]
- Lee, C.G.; Yu, S.H. Exterminator for the Nests of Vespa velutina nigrithorax Using an Unmanned Aerial Vehicle. Drones 2023, 7, 281. [Google Scholar] [CrossRef]
- Hamet, P.; Tremblay, J. Artificial intelligence in medicine. Metabolism 2017, 69, S36–S40. [Google Scholar] [CrossRef] [PubMed]
- Olson, D.L.; Delen, D. Advanced Data Mining Techniques; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Liu, B.; Liu, B. Supervised Learning. Web Data Mining: Exploring Hyperlinks, Contents, and Usage Data; Springer: Berlin, Germany, 2011; pp. 63–132. [Google Scholar] [CrossRef]
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the 2017 International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Van, O.M.; Wiering, M. Reinforcement learning and markov decision processes In Reinforcement Learning; Springer: Berlin/Heidelberg, Germany, 2012; pp. 3–42. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing atari with deep reinforcement learning. arXiv 2013, arXiv:1312.5602. [Google Scholar] [CrossRef]
- Dosilovic, F.K.; Brcic, M.; Hlupic, N. Explainable artificial intelligence: A survey. In Proceedings of the 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), IEEE, Opatija, Croatia, 21–25 May 2018; pp. 0210–0215. [Google Scholar] [CrossRef]
- Ayamga, M.; Akaba, S.; Nyaaba, A.A. Multifaceted applicability of drones: A review. Technol. Forecast. Soc. Chang. 2021, 167, 120677. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Wang, X.; Chowdhery, A.; Chiang, M. SkyEyes: Adaptive video streaming from UAVs. In Proceedings of the 3rd Workshop on Hot Topics in Wireless 2016, New York, NY, USA, 3–7 October 2016; pp. 2–6. [Google Scholar] [CrossRef]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone-captured Scenarios. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops, Montreal, BC, Canada, 11–17 October 2021; pp. 2778–2788. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar] [CrossRef]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. Scaled-yolov4: Scaling cross stage partial network. In Proceedings of the IEEE/cvf Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 13029–13038. [Google Scholar]
- Liu, Z.; Lin, T.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.; Kaiser, L.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Woo, S.; Park, J.C.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Li, P.; Zuo, W.; Hu, Q. Spatial Channel Attention for Deep Convolutional Neural Networks. Mathematics 2022, 10, 1750. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J.A. A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- Zhao, L.; Zhu, M. MS-YOLOv7:YOLOv7 Based on Multi-Scale for Object Detection on UAV Aerial Photography. Drones 2023, 7, 188. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, T.; He, W.; Zhang, Z. YOLOv7-UAV: An Unmanned Aerial Vehicle Image Object Detection Algorithm Based on Improved YOLOv7. Electronics 2023, 12, 3141. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resolution (Pixels) | Analysis Part Processing Speed |
|---|---|
| 640 × 480 | 60 frame/s |
| 1280 × 960 | 30 frame/s |
| 1920 × 1080 | 15 frame/s |
| 3840 × 2160 | 3 frame/s |
| Model | Epoch | Batch | Image Size | Multi-Scale | Image Processing |
|---|---|---|---|---|---|
| (a) | 77 | 16 | 640 | X | O |
| (b) | 175 | 8 | 1280 | O | O |
| (c) | 179 | 4 | 1920 | O | O |
| (d) | 161 | 1 | 3840 | O | O |
| Model | Confusion Matrix | Precision | Recall | Accuracy | F1 Score | |||
|---|---|---|---|---|---|---|---|---|
| TP | FP | FN | TN | |||||
| (a) | 7 | 332 | 222 | 6597 | 2.0% | 3.0% | 92.2% | 2.4% |
| (b) | 214 | 726 | 15 | 6203 | 22.7% | 93.4% | 89.6% | 36.5% |
| (c) | 213 | 220 | 16 | 6709 | 49.1% | 93.0% | 96.7% | 61.2% |
| (d) | 212 | 0 | 17 | 6929 | 100% | 92.5% | 99.7% | 96.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, Y.; Jeon, M.-S.; Lee, J.; Yu, S.-H.; Kim, S.-b.; Kim, D.; Kim, K.-C.; Lee, S.; Lee, C.-W.; Choi, I. Development of a Real-Time Vespa velutina Nest Detection and Notification System Using Artificial Intelligence in Drones. Drones 2023, 7, 630. https://doi.org/10.3390/drones7100630
Jeong Y, Jeon M-S, Lee J, Yu S-H, Kim S-b, Kim D, Kim K-C, Lee S, Lee C-W, Choi I. Development of a Real-Time Vespa velutina Nest Detection and Notification System Using Artificial Intelligence in Drones. Drones. 2023; 7(10):630. https://doi.org/10.3390/drones7100630
Chicago/Turabian StyleJeong, Yuseok, Moon-Seok Jeon, Jaesu Lee, Seung-Hwa Yu, Su-bae Kim, Dongwon Kim, Kyoung-Chul Kim, Siyoung Lee, Chang-Woo Lee, and Inchan Choi. 2023. "Development of a Real-Time Vespa velutina Nest Detection and Notification System Using Artificial Intelligence in Drones" Drones 7, no. 10: 630. https://doi.org/10.3390/drones7100630
APA StyleJeong, Y., Jeon, M.-S., Lee, J., Yu, S.-H., Kim, S.-b., Kim, D., Kim, K.-C., Lee, S., Lee, C.-W., & Choi, I. (2023). Development of a Real-Time Vespa velutina Nest Detection and Notification System Using Artificial Intelligence in Drones. Drones, 7(10), 630. https://doi.org/10.3390/drones7100630