


Dynamic Offloading in Flying Fog Computing: Optimizing IoT Network Performance with Mobile Drones
 , ,
, ,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
- Edge data processing: Flying fog computing moves data processing tasks closer to the source, which is particularly advantageous when real-time analysis is crucial. Drones equipped with fog servers can process data on-site, reducing the need to transmit raw data over long distances, thus conserving bandwidth and reducing latency.
- Scalability and flexibility: The mobility of drones enables dynamic scalability, allowing fog servers to be redeployed and allocated based on the changing demands of the IoT network. Drones can adjust their routes and position autonomously, ensuring seamless adaptability to varying data loads and network requirements.
- Reliable connectivity in remote and harsh areas: Conventional IoT networks may face connectivity issues in remote or challenging terrains. Flying fog computing overcomes this limitation by flying fog-enabled drones to these locations, creating temporary communication hotspots and ensuring uninterrupted data transmission and processing.
- Data privacy and security: Since data remains within the local network and is processed in the drone, in proximity to devices, the risk of sensitive information being exposed to external threats is significantly reduced. This added layer of security bolsters the confidence of users and organizations in adopting IoT solutions.
- Disaster response and emergencies: In disaster-stricken areas, where infrastructure may be compromised or non-existent, fog-enabled drones can rapidly deploy and establish a communication and data processing network, facilitating critical information exchange and aiding rescue efforts.
- Designing a general framework for flying fog-based IoT networks.
- Developing a computational model of the proposed flying fog-based IoT networks.
- Developing an optimized dynamic offloading strategy for flying fog-based IoT networks.
- Developing an evaluation testbed that is used to emulate flying fog-based IoT networks.
- Evaluating the proposed offloading model via simulations and experiments.
2. Related Work
- Mobility and connectivity management: Managing the movement of flying fog nodes and ensuring seamless connectivity with ground-based IoT devices present challenges. Effective handover mechanisms and protocols are needed to maintain connectivity as the drones move.
- Energy constraints: Flying fog nodes are typically powered by batteries with limited capacity. Prolonged flight durations and data processing tasks may drain energy quickly. Energy-efficient strategies for flight planning, task allocation, and communication are essential.
- Resource allocation: Optimally allocating computing, storage, and communication resources among multiple flying fog units and IoT nodes is complex. Resource management algorithms must be designed to handle dynamic and heterogeneous environments.
- Communication latency and bandwidth: Low latency is critical for real-time IoT applications. The limited wireless communication bandwidth between flying fog nodes and ground devices can impact data transmission and processing delays.
- Security and privacy: Flying fog nodes introduce new security challenges due to their mobility and potential vulnerability to physical attacks. Ensuring data privacy, authentication, and secure communication between nodes is paramount.
- Scalability: The network must scale efficiently due to the growth in IoT and flying fog devices. The architecture and protocols must be scalable to accommodate growing connected devices.
- Fault tolerance and reliability: In dynamic environments, flying fog nodes may encounter various challenges, such as signal interference, adverse weather conditions, or mechanical failures. Mechanisms for fault tolerance and reliable operations are crucial.
- Regulatory and legal considerations: Deploying flying fog nodes in urban areas may involve compliance with aviation regulations, privacy laws, and safety standards. Understanding and adhering to these requirements is necessary for practical implementations.
- Cost and deployment challenges: The cost of flying fog nodes, their maintenance, and the logistics of deploying them at scale can be significant barriers to adoption. Developing cost-effective and easily deployable solutions is essential.
- Integration with existing IoT ecosystems: Integrating flying fog technology with existing IoT infrastructure and protocols is complex. Compatibility and interoperability must be considered to leverage the full potential of both technologies.
- These challenges are closely related to our major focus and work objectives. These specific challenges have a direct impact on our main problem and are an important component of our research area.
- Our review of the available literature and early investigations demonstrated that these three issues have significance to IoT applications and should be prioritized. By addressing these specific gaps, we may also give useful insights and solutions to the scientific community.
- Each of the chosen tasks has numerous issues that must be thoroughly investigated. We may provide a more extensive analysis and propose well-founded ways to address these difficulties effectively by reducing our focus.
- Addressing all possible difficulties within a single research article may result in a lack of practicality or answers that are too broad in some circumstances. We want to make recommendations that practitioners and researchers may easily put into action.
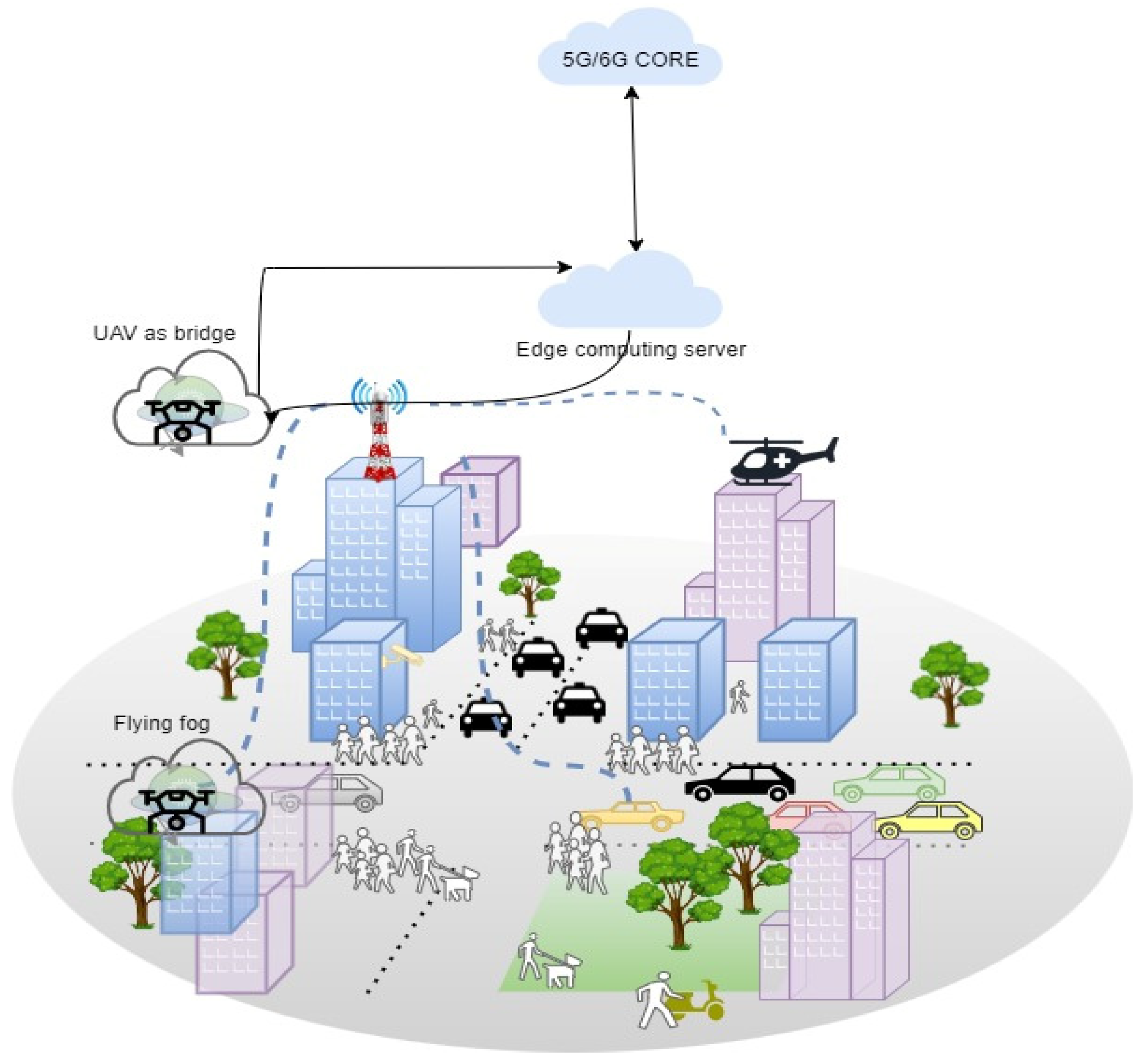
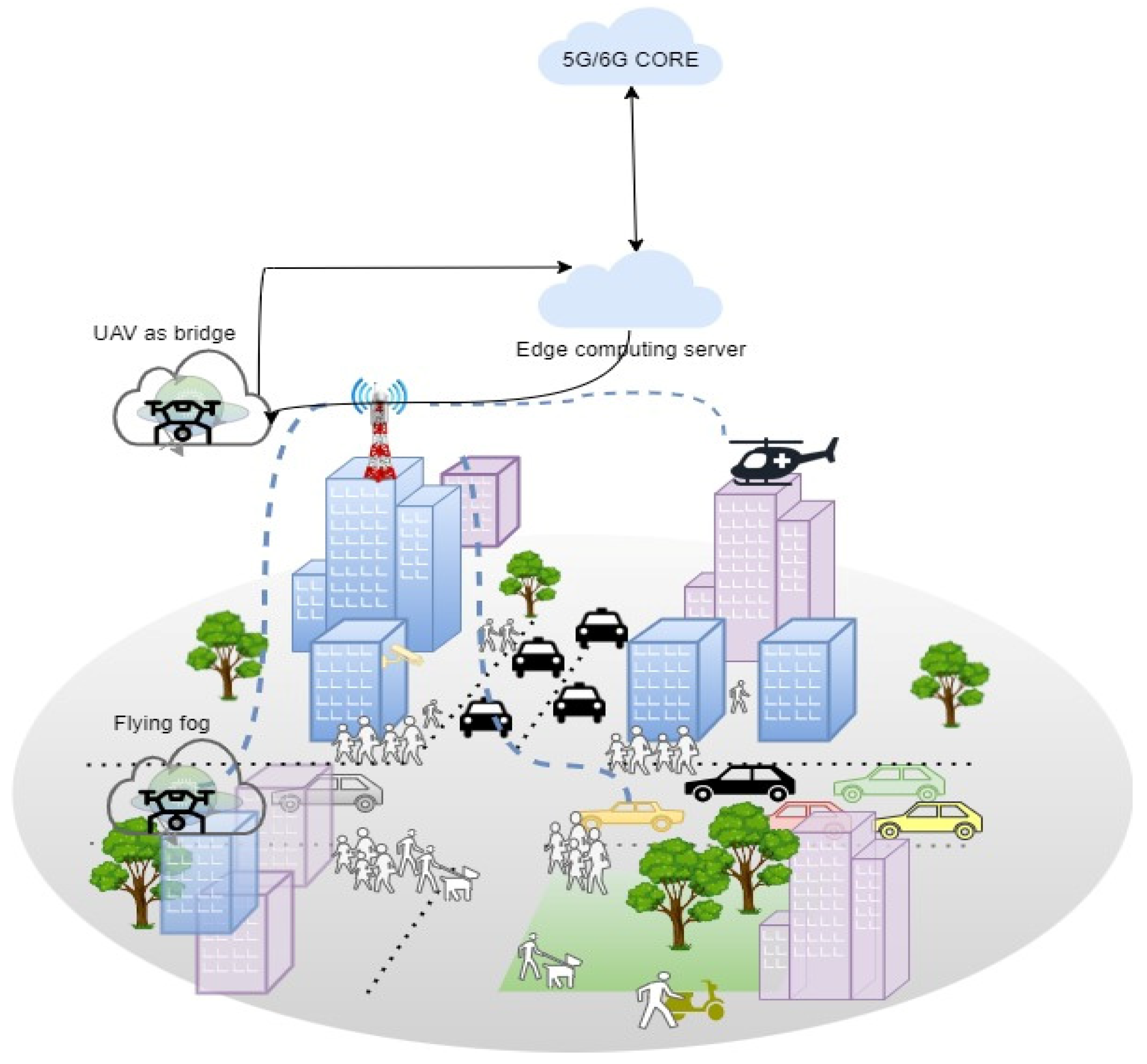
3. Proposed Flying Fog-Based IoT Model
- Smart city applications: Flying fog drones can serve as edge nodes to assist smart cities. They can support many applications, including traffic management, surveillance, public Internet coverage, and public events, enhancing the efficiency and responsiveness of urban infrastructure.
- Agriculture applications: Flying fog can assist IoT nodes deployed to monitor and analyze crop health, soil conditions, and weather patterns. They can provide precision agriculture solutions, including targeted irrigation, pest control, and fertilizer application. Also, flying fog-based IoT systems can identify and target areas affected by pests, delivering precise pest control measures while minimizing the use of chemicals. This approach is environmentally friendly and cost-effective.
- Environmental monitoring: Flying fog can be used with IoT nodes deployed to collect environmental data, such as air quality, water quality, and temperature, in remote or inaccessible locations. These data are valuable for environmental research and monitoring.
- Industrial IoT (IIoT) applications: Flying fog nodes can be employed in industrial settings to monitor equipment health, perform inspections, and collect data on manufacturing processes. This helps in predictive maintenance, reducing downtime, and improving efficiency.
4. Computation Model
4.1. Flying Fog Computing
4.2. MEC Computing
4.3. Problem Statement
4.4. Computational Offloading Algorithm
- Achieving a neutral initial state: Leaving the first cell empty signifies a neutral or undefined starting state for the dynamic offloading decision process. In dynamic offloading, there might not be a clear initial decision or offloading strategy until the algorithm begins evaluating the tasks and their characteristics.
- Random exploration: Filling subsequent cells with random bit streams can introduce an element of randomness or variability into the initial state. This randomness may be useful for exploring different offloading strategies or scenarios, especially when the optimal offloading decision is uncertain or context-dependent.
- Task dynamics: In dynamic offloading scenarios, the characteristics of computing tasks, network conditions, and device capabilities can change over time. Using random bit streams might simulate the evolving nature of these parameters, allowing the algorithm to adapt and make dynamic offloading decisions based on simulated changes.
- Algorithm flexibility: By initializing with randomness, the algorithm is not pushed toward any particular offloading decision at the start. This approach provides flexibility to adapt to various tasks and network conditions encountered during the dynamic offloading process.
- Algorithm exploration: Dynamic programming algorithms often involve exploring different states and transitions to find optimal solutions. The randomness in the initialization can lead to diverse paths of exploration, helping the algorithm identify suitable offloading decisions.
| Algorithm 1. The flying fog-based computation offloading algorithm using dynamic programming. |
| Input data: Ticonstraint, Rdrone, MEC, and Rdrone, IoT 1. InitializeTimeMatrices() 2. SetCompletionDeadline(Ticonstraint) 3. SetTransmissionRate(Rdrone, MEC, Rdrone, IoT) 4. GenerateRandomTask() 5. randomBitStream = GenerateRandomBitStream() 6. Drone_FogDelay = CalculateDelayAt-Drone-Fog(randomBitStream) 7. MECServerDelay = CalculateDelayAtMECServer(randomBitStream) 8. If (randomBitStream [0] == 1): 9. StartCell = Drone_FogDelay 10. Else 11. StartCell = MECServerDelay 12. End if 13. For (i = 0: K − 1) 14. If (randomBitStream[i] == 1): 15. randomBitStream[i] = GenerateRandomBit() 16. End if 17. PutBitInCorrectPosition(randomBitStream[i], Table) 18. If CellVisitedBefore (Table): 19. If (NewTotalDelay < PreviousTotalDelay): 20. ReplaceTotalDelayWithNew(Table) 21. CalculateRemainingBitStreamDelay(Table) 22. Else 23. KeepPreviousTotalDelay(Table) 24. CalculateRemainingCellDelay(Table) 25. End if 26. End if 27. End for 28. If ((NumberOfBitsInTable == N) & (Ttotal < T_iconstraint) & (HammingDistanceCriterionMet)): 29. Return (Ttotal) 30. End if 31. End |
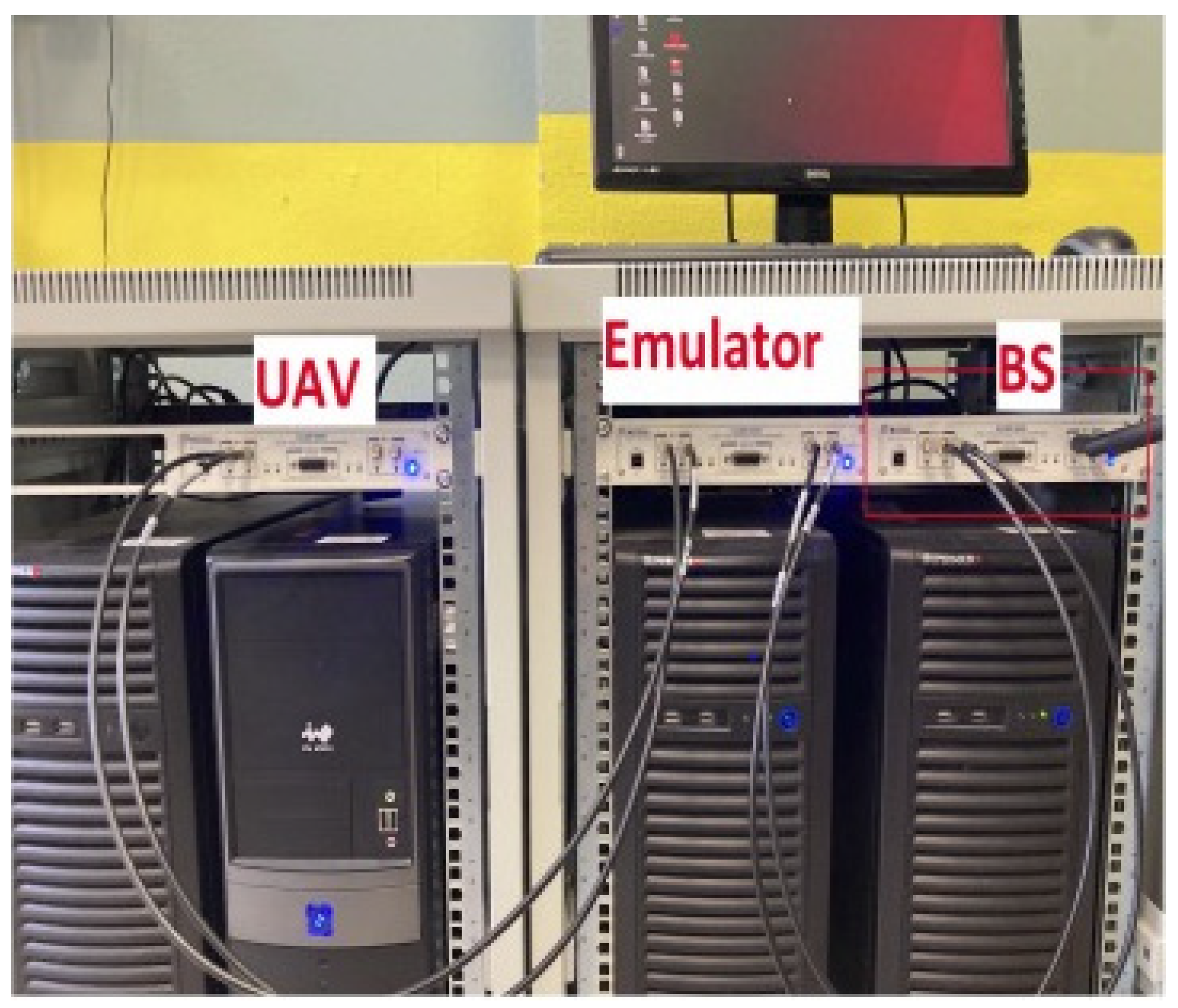
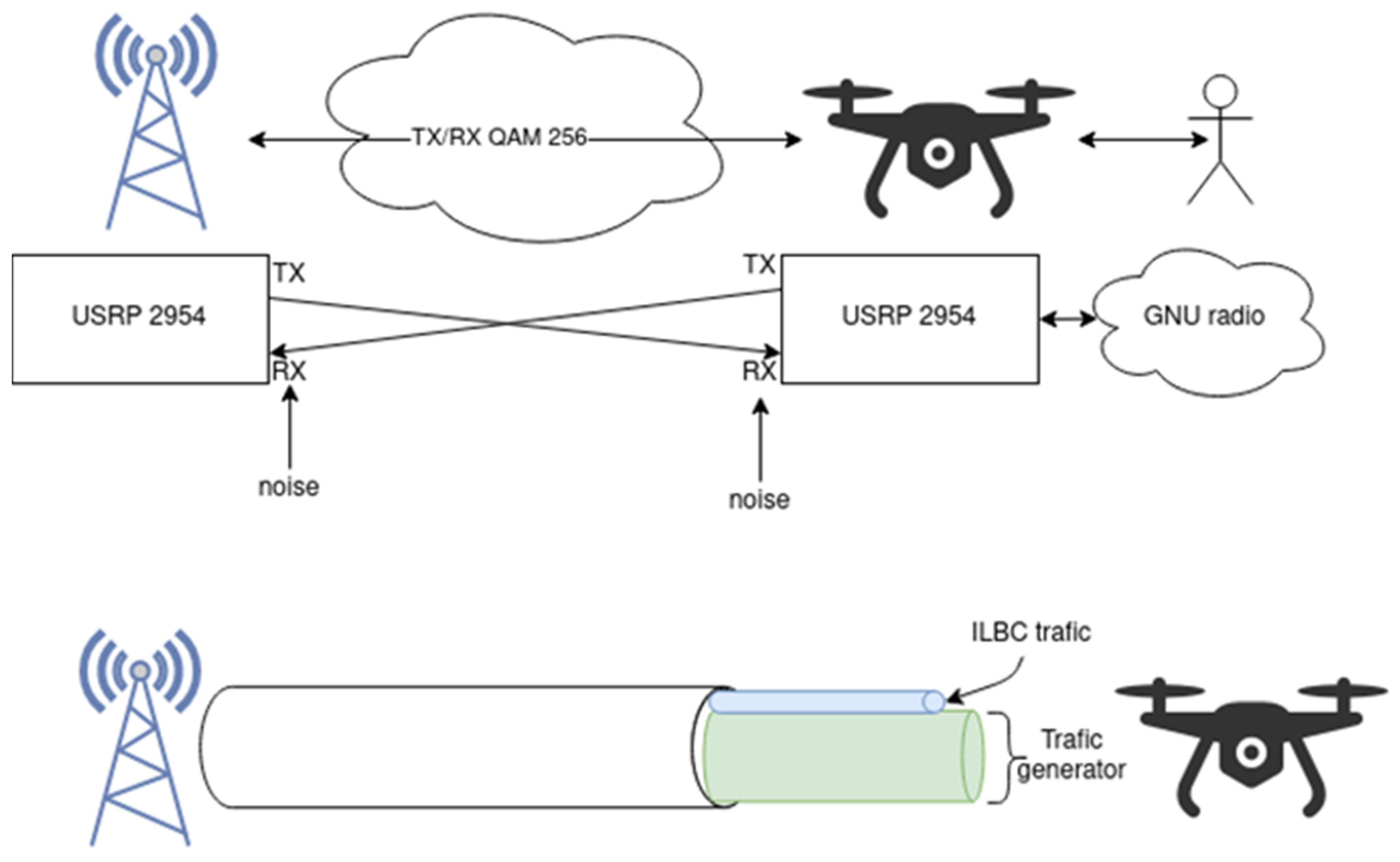
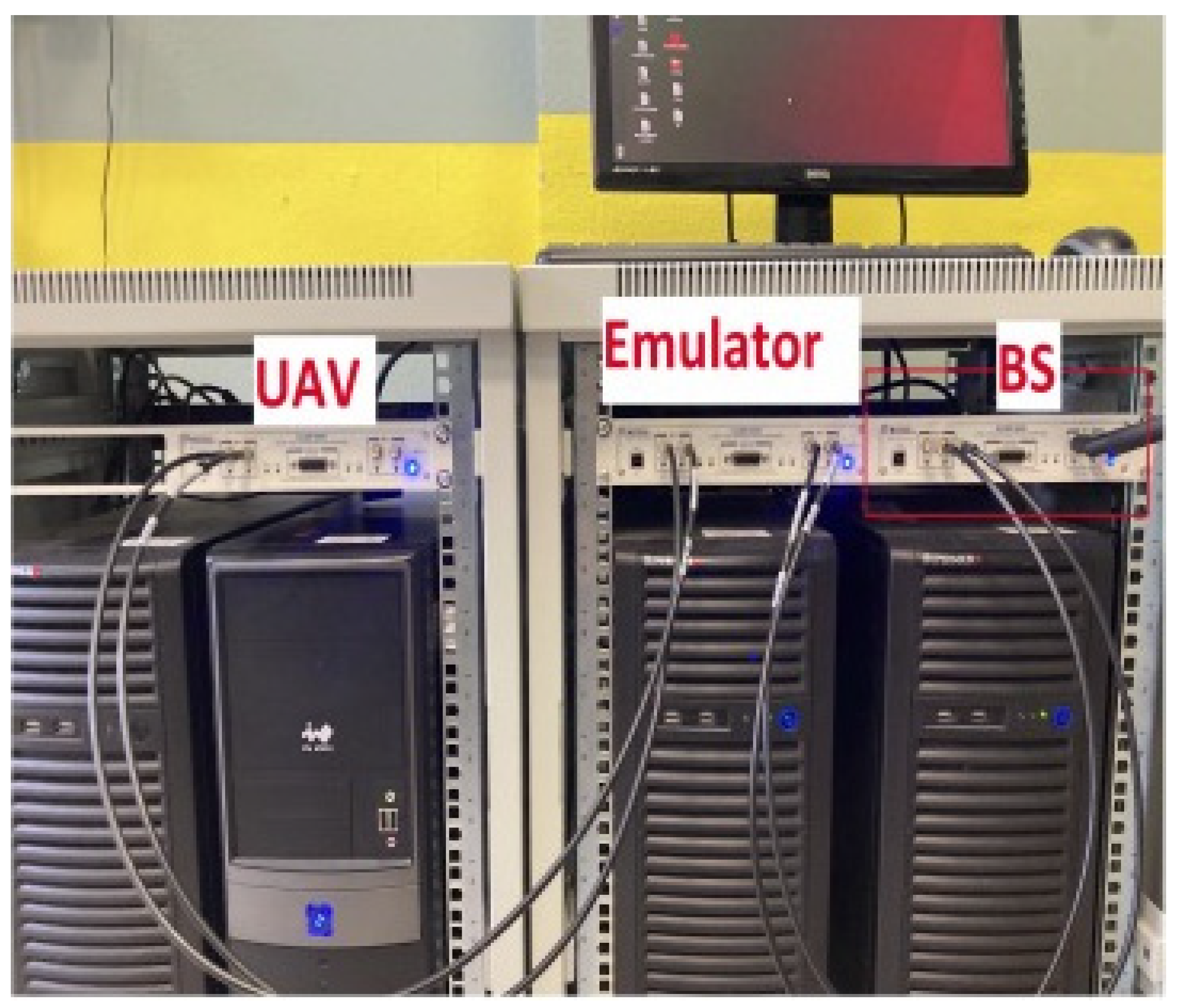
5. Developed Testbed for System Evaluation
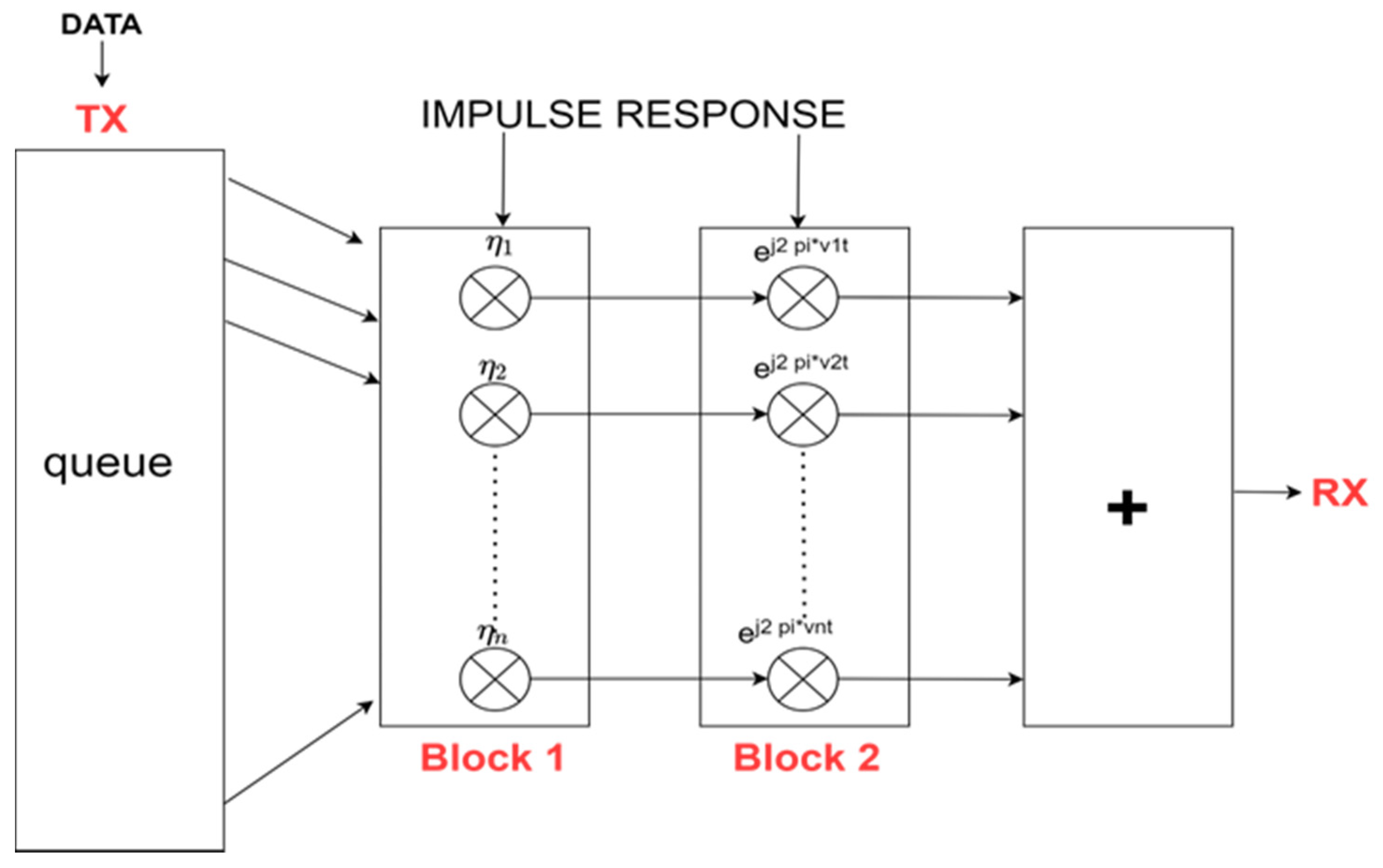
- Frequency shift: The relative motion between the drone and IoT nodes or between a drone and another causes a Doppler shift in the received signal’s frequency. This frequency shift can lead to a deviation from the expected frequency, which may result in signal distortions and errors.
- Doppler spread: As drones/devices move, the Doppler effect affects different parts of the transmitted signal differently. Some parts may experience a positive frequency shift, while others may have a negative one. This spread of frequencies is referred to as Doppler spread, which depends on the relative velocity between the transmitter and the receiver. This spread can cause frequency-selective fading and interference between symbols in the received signal, leading to inter-symbol interference (ISI) and impacting the data transmission reliability.
- Fading and signal loss: The Doppler effect’s frequency shifts can lead to fading, where the received signal strength fluctuates rapidly over time. This fading can cause a momentary loss of signal or reduced signal quality, leading to dropped calls, data packet errors, or reduced data rates in IoT systems.
- Flexibility and adaptability: SDR allows for flexible and adaptable radio communication systems. This flexibility enables easy reconfiguration and updates, making it possible to support multiple communication standards and protocols with the same hardware.
- Reduced hardware complexity: SDR reduces the need for specialized hardware components for different radio applications. With SDR, much of the functionality is implemented in software, simplifying the hardware design and reducing the number of physical devices required.
- Cost-effectiveness: The use of common hardware for multiple communication standards and the ability to reconfigure devices through software updates can lead to cost savings in the long run. SDR eliminates the need to replace or upgrade hardware for each new communication standard, which is particularly beneficial in rapidly evolving technology landscapes.
- Interoperability: SDR allows for seamless interoperability between different radio systems and protocols. By reconfiguring the software, an SDR device can communicate with various existing communication standards, enabling better coordination and compatibility between different systems.
- Enhanced performance: SDR enables the implementation of advanced signal processing techniques such as digital filtering, error correction, and adaptive modulation. These capabilities can improve signal quality, increase data rates, and improve overall performance.
- Rapid prototyping and development: Developing and prototyping new radio systems is faster and more straightforward with SDR. Researchers can quickly modify and test new algorithms and protocols in software without requiring extensive hardware changes.
- Spectrum efficiency: SDR allows for dynamic spectrum access, where the radio system can intelligently adapt its frequency and bandwidth usage based on the current spectrum availability. This feature enhances spectrum efficiency and makes better use of available resources.
- Reducing energy consumption: SDR systems can optimize power consumption by dynamically adjusting signal processing and transmission parameters. This adaptability can lead to energy-efficient radio communications.
- Remote management and monitoring: With SDR, remote management and the monitoring of radio devices have become easier. Software updates, performance monitoring, and troubleshooting can be carried out remotely, reducing the need for physical intervention.
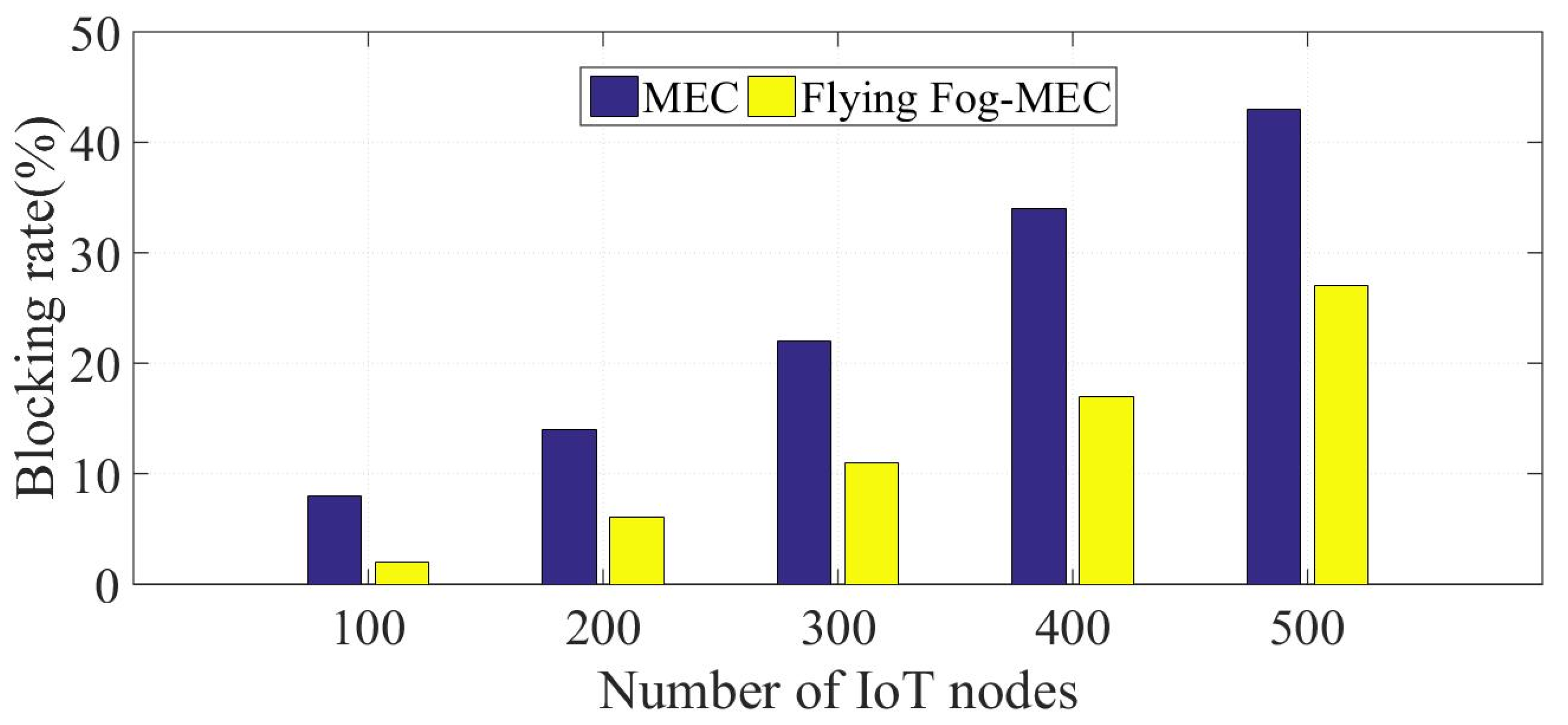
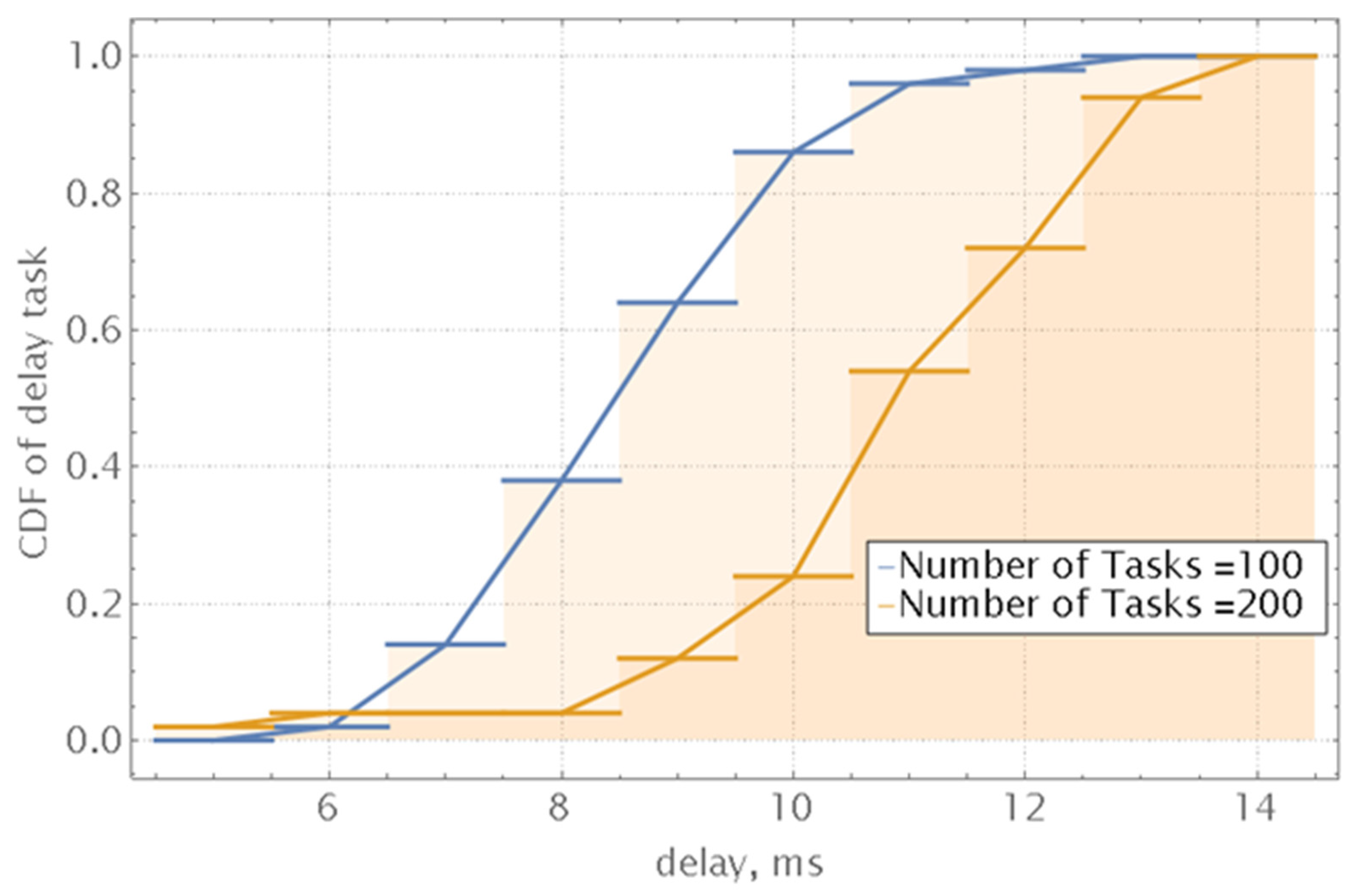
6. Simulation and Results
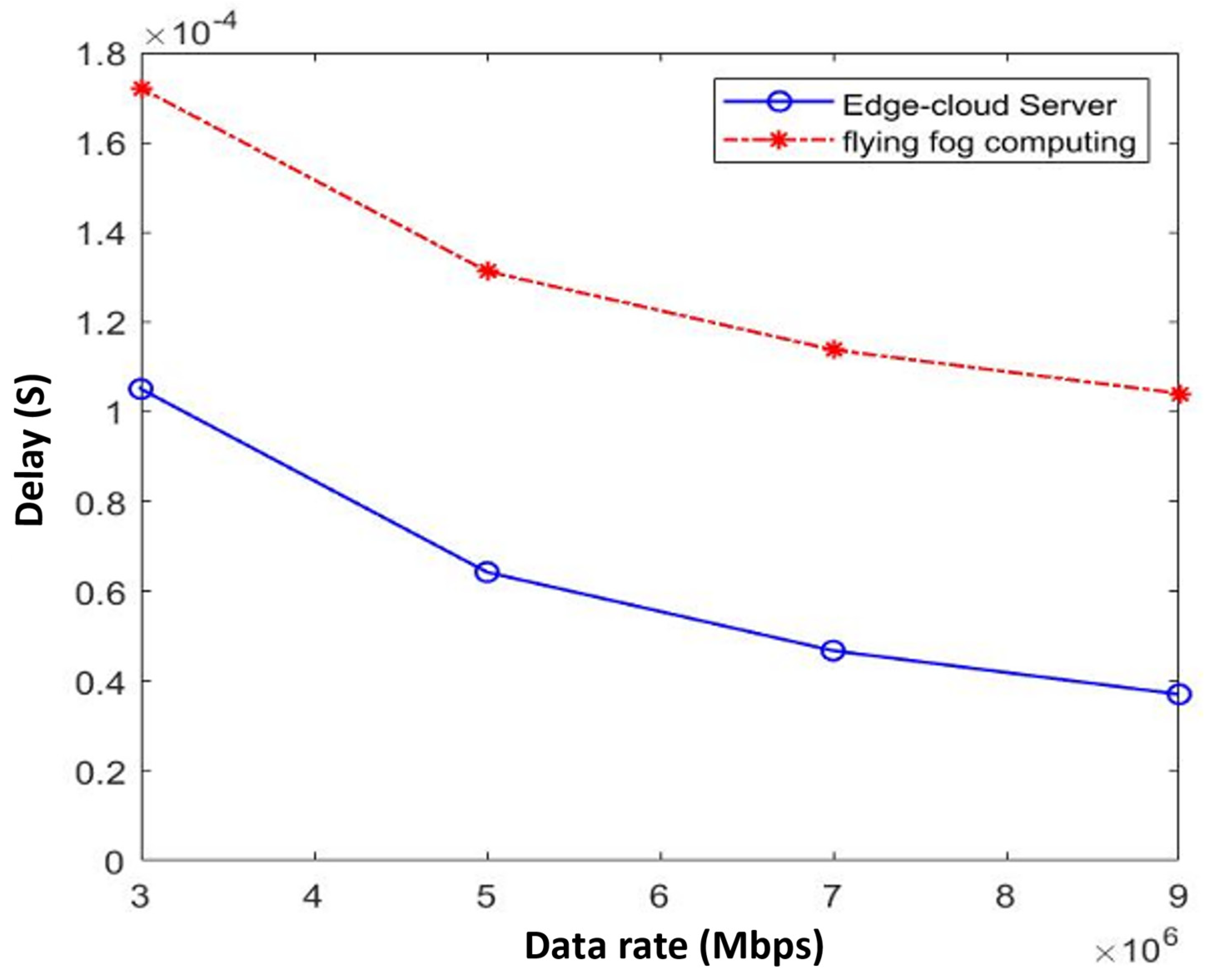
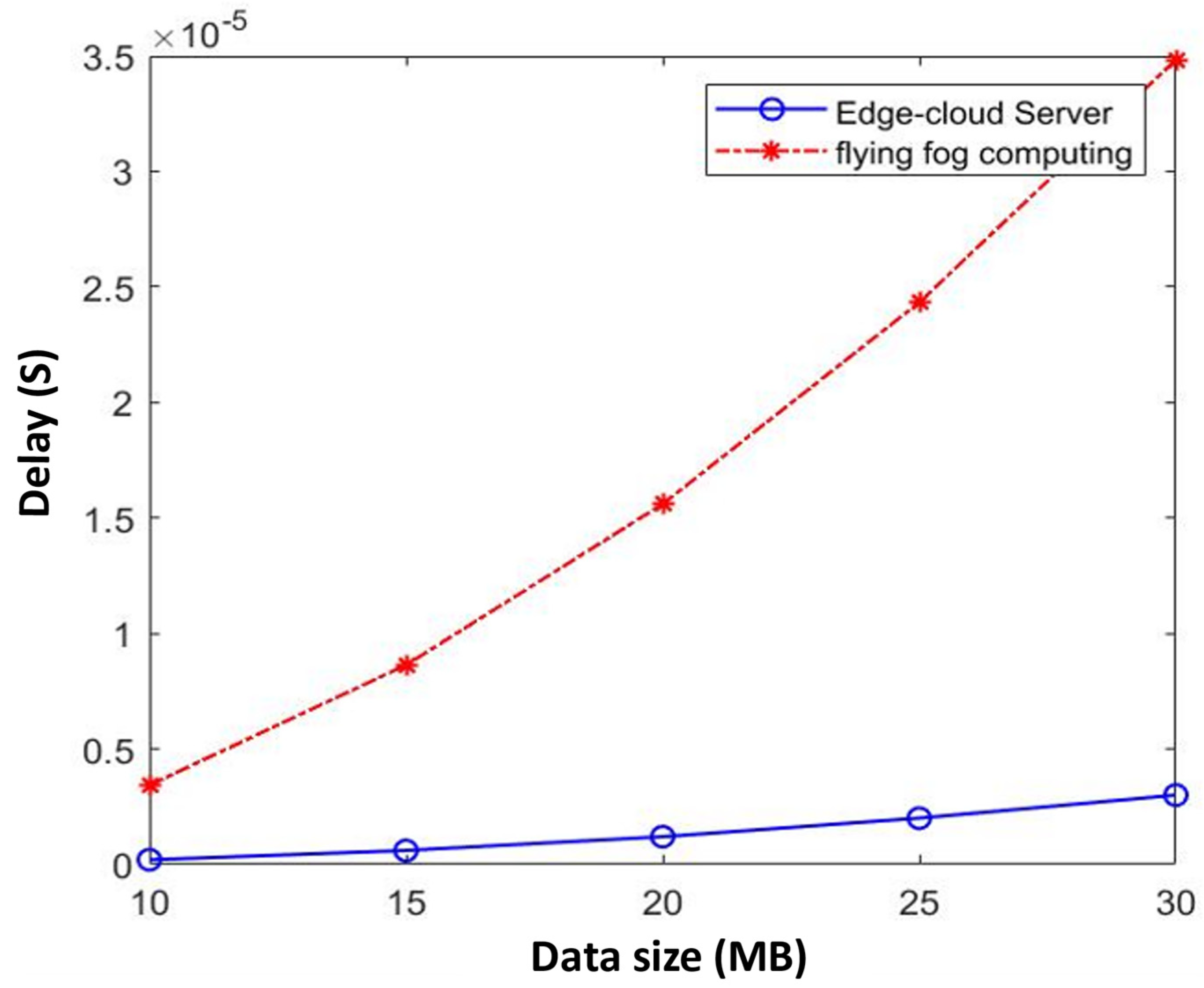
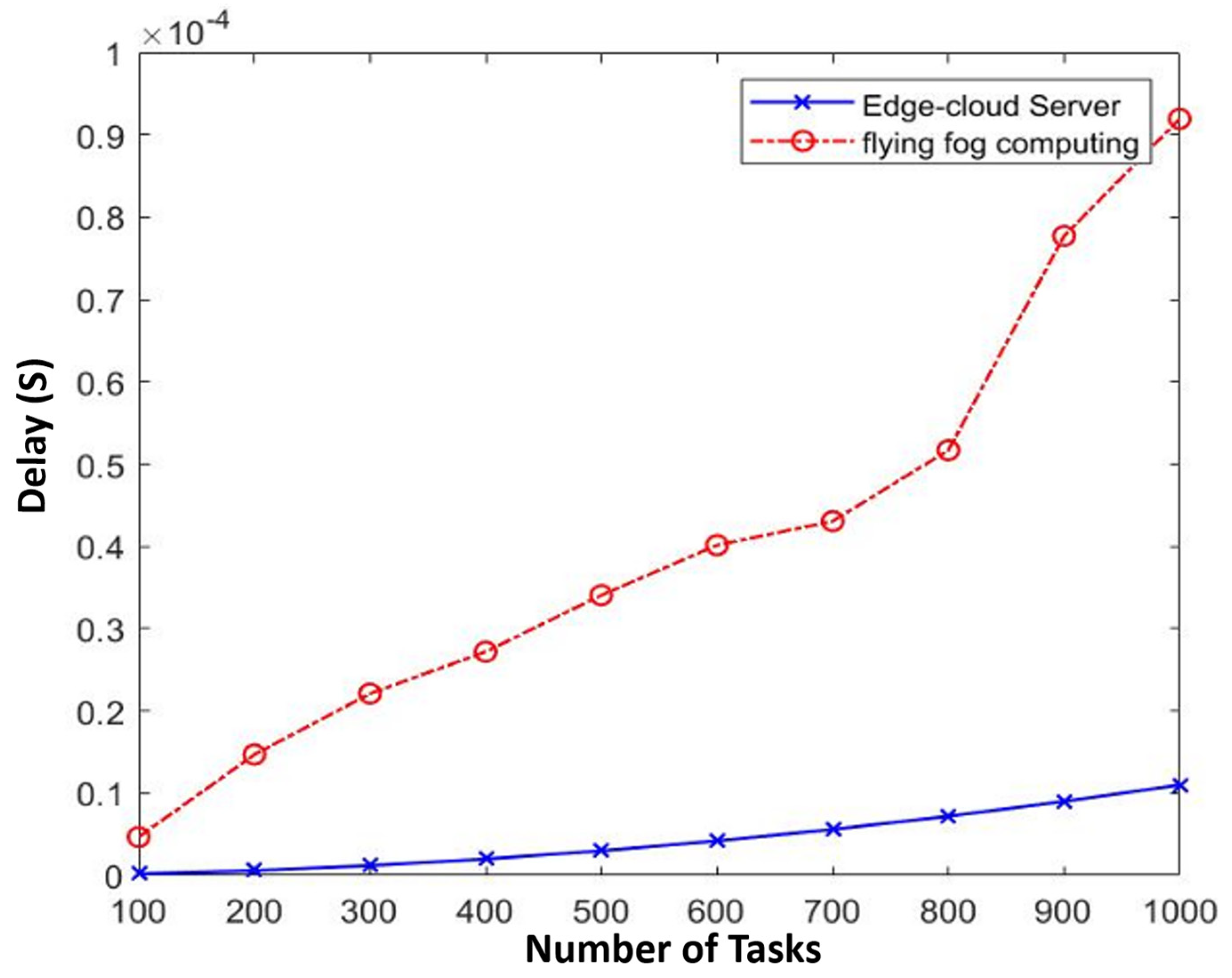
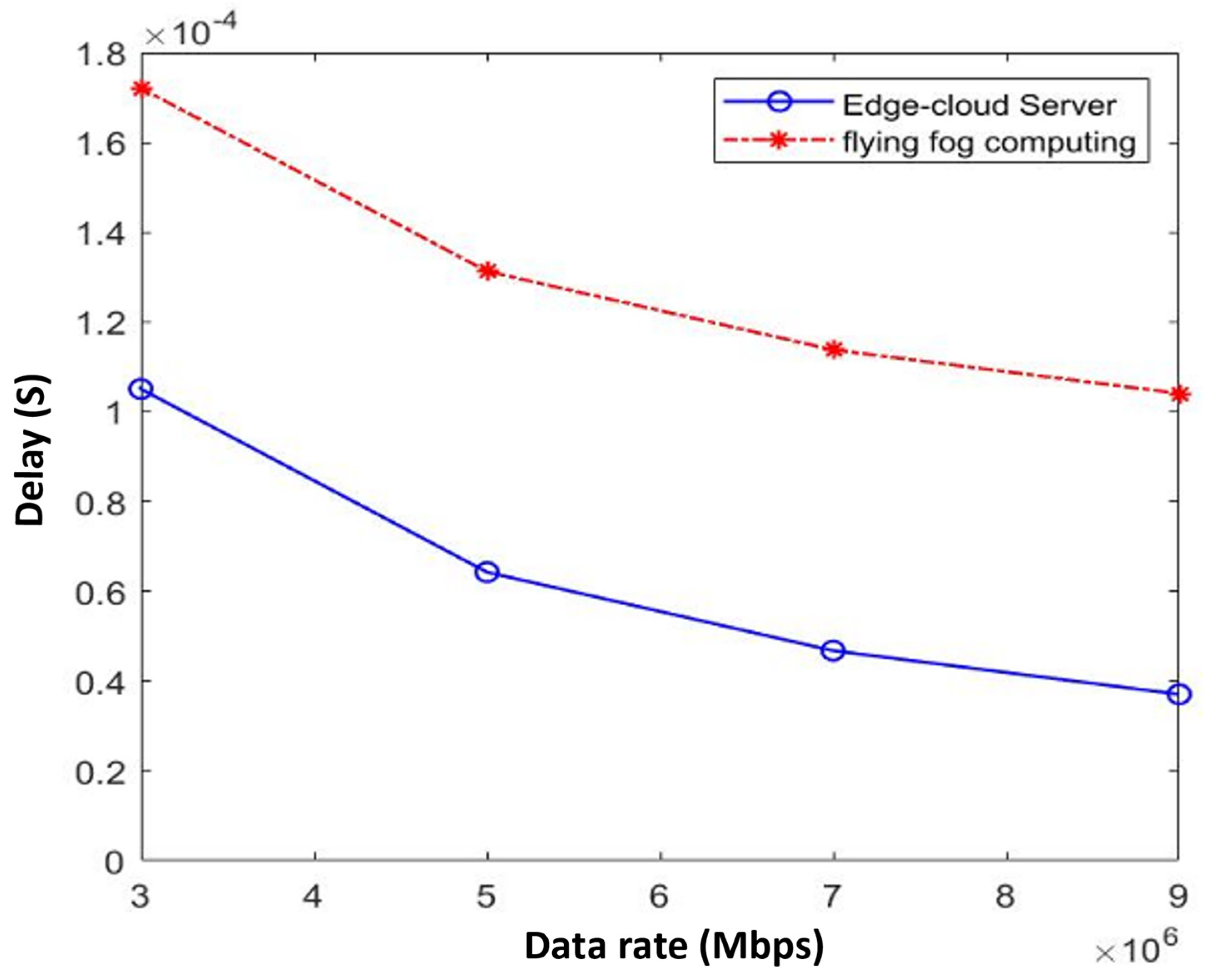
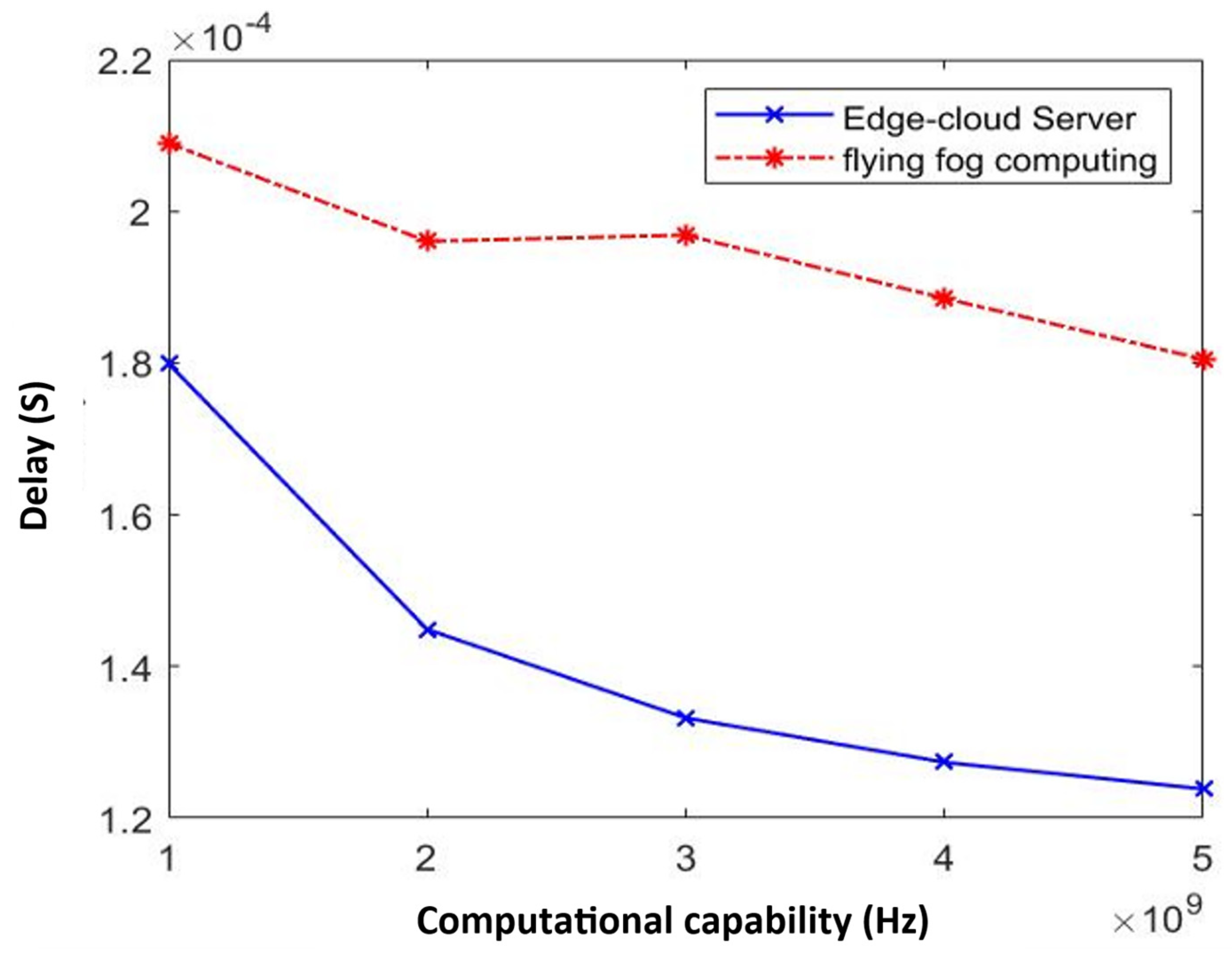
6.1. Simulation Evaluation
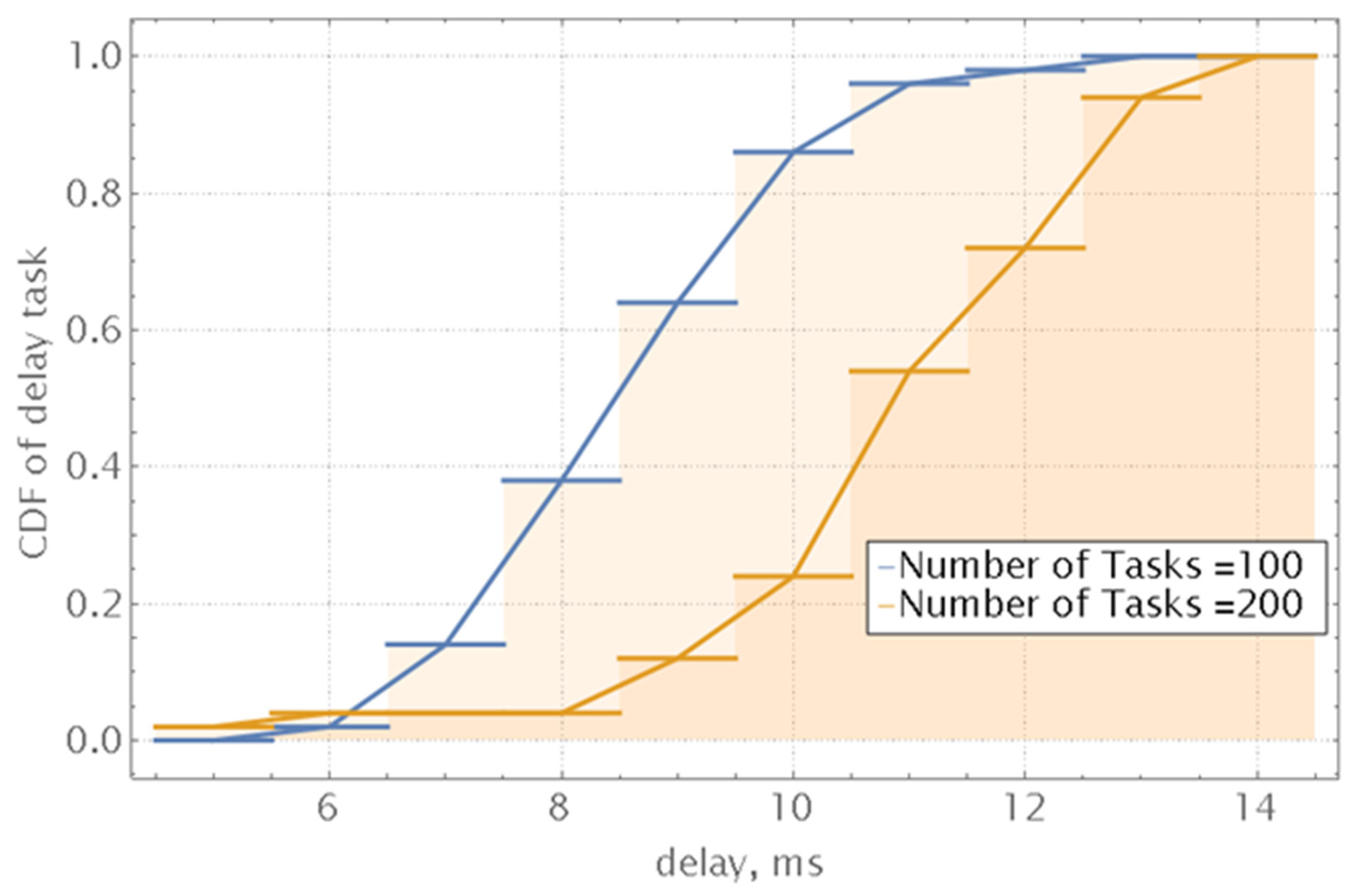
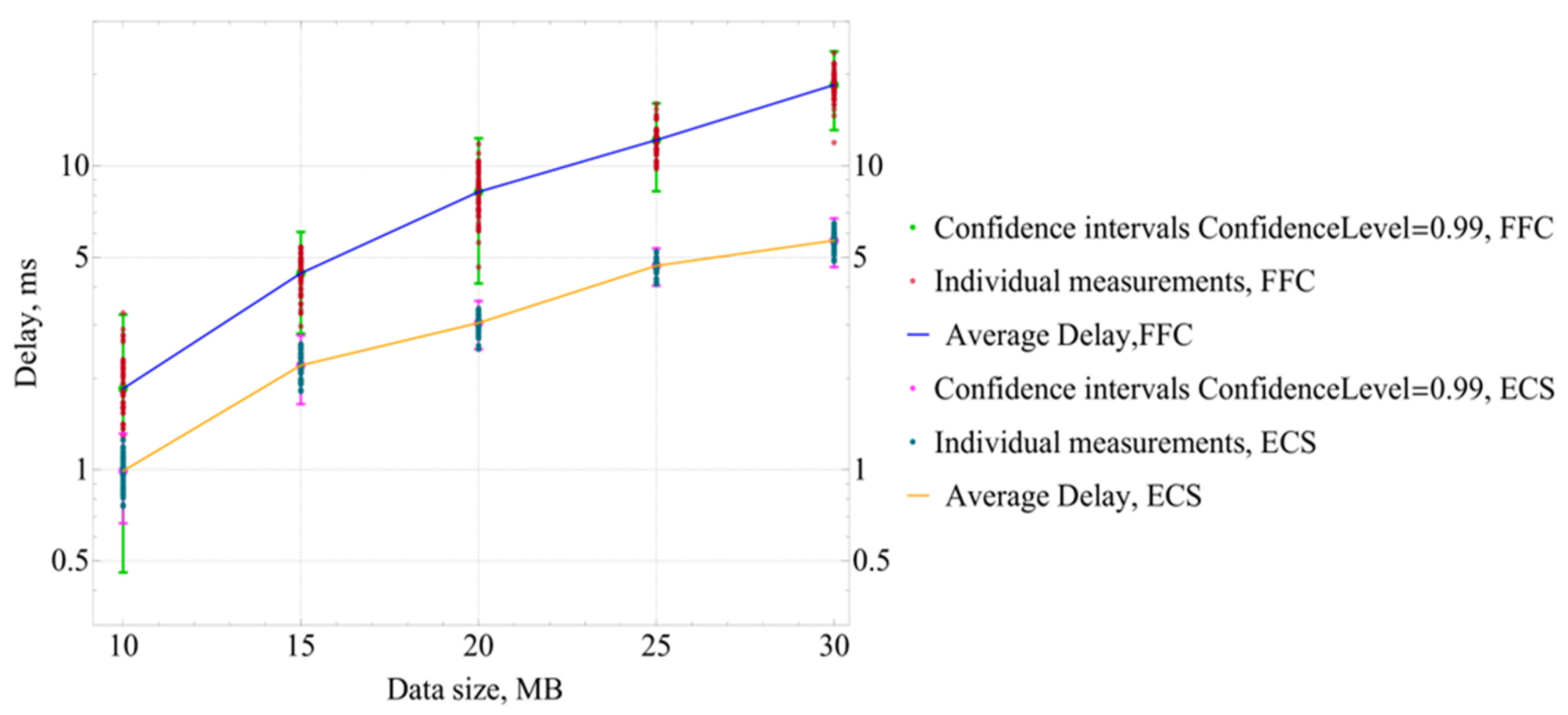
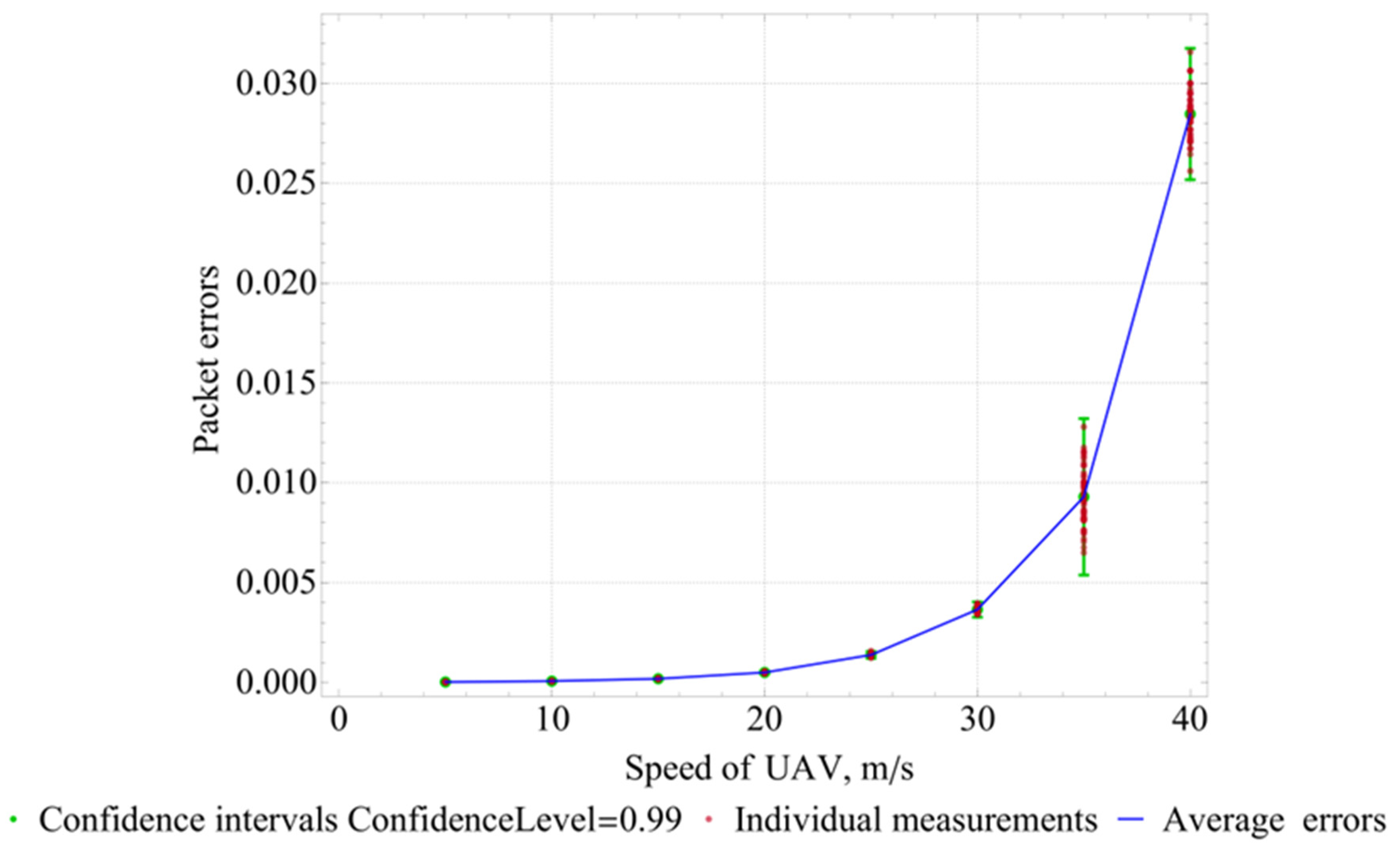
6.2. Experimental Evaluation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Furstenau, L.B.; Rodrigues, Y.P.R.; Sott, M.K.; Leivas, P.; Dohan, M.S.; López-Robles, J.R.; Cobo, M.J.; Bragazzi, N.L.; Choo, K.-K.R. Internet of Things: Conceptual Network Structure, Main Challenges and Future Directions. Digit. Commun. Netw. 2023, 9, 677–687. [Google Scholar] [CrossRef]
- Ateya, A.A.; Algarni, A.D.; Hamdi, M.; Koucheryavy, A.; Soliman, N.F. Enabling Heterogeneous IoT Networks over 5G Networks with Ultra-Dense Deployment—Using MEC/SDN. Electronics 2021, 10, 910. [Google Scholar] [CrossRef]
- Jin, B.; Long, F.; Xia, F.; Chen, S.; Xu, H.; Zhan, W.; Feng, W.; Zhang, R. Advantages of 5G Slicing technology in the internet of things. In Proceedings of the 2023 IEEE International Conference on Integrated Circuits and Communication Systems (ICICACS), Raichur, India, 24–25 February 2023; pp. 1–5. [Google Scholar]
- Qadir, Z.; Le, K.N.; Saeed, N.; Munawar, H.S. Towards 6G Internet of Things: Recent Advances, Use Cases, and Open Challenges. ICT Express 2023, 9, 296–312. [Google Scholar] [CrossRef]
- Ateya, A.A.; Muthanna, A.; Koucheryavy, A.; Maleh, Y.; El-Latif, A.A.A. Energy Efficient Offloading Scheme for MEC-Based Augmented Reality System. Cluster Comput. 2023, 26, 789–806. [Google Scholar] [CrossRef]
- Bhatia, S.; Mallikarjuna, B.; Gautam, D.; Gupta, U.; Kumar, S.; Verma, S. The Future IoT: The current generation 5G and next generation 6G and 7G technologies. In Proceedings of the 2023 International Conference on Device Intelligence, Computing and Communication Technologies, (DICCT), Dehradun, India, 17–18 March 2023; pp. 212–217. [Google Scholar]
- Jamshed, M.A.; Ali, K.; Abbasi, Q.H.; Imran, M.A.; Ur-Rehman, M. Challenges, Applications, and Future of Wireless Sensors in Internet of Things: A Review. IEEE Sens. J. 2022, 22, 5482–5494. [Google Scholar] [CrossRef]
- You, K.Y. A Summary on 5G and Future 6G Internet of Things. In Advances in Wireless Technologies and Telecommunication; IGI Global: Hershey, PA, USA, 2023; pp. 196–243. ISBN 9781799892663. [Google Scholar]
- Fortino, G.; Savaglio, C.; Spezzano, G.; Zhou, M. Internet of Things as System of Systems: A Review of Methodologies, Frameworks, Platforms, and Tools. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 223–236. [Google Scholar] [CrossRef]
- Sefati, S.S.; Halunga, S. Ultra-reliability and Low-latency Communications on the Internet of Things Based on 5G Network: Literature Review, Classification, and Future Research View. Trans. Emerg. Telecommun. Technol. 2023, 34, e4770. [Google Scholar] [CrossRef]
- Ateya, A.A.; Ali Alhussan, A.; Abdallah, H.A.; Al duailij, M.A.; Khakimov, A.; Muthanna, A. Edge Computing Platform with Efficient Migration Scheme for 5G/6G Networks. Comput. Syst. Sci. Eng. 2023, 45, 1775–1787. [Google Scholar] [CrossRef]
- Hazra, A.; Rana, P.; Adhikari, M.; Amgoth, T. Fog Computing for Next-Generation Internet of Things: Fundamental, State-of-the-Art and Research Challenges. Comput. Sci. Rev. 2023, 48, 100549. [Google Scholar] [CrossRef]
- Apat, H.K.; Nayak, R.; Sahoo, B. A Comprehensive Review on Internet of Things Application Placement in Fog Computing Environment. Internet Things 2023, 23, 100866. [Google Scholar] [CrossRef]
- Hayawi, K.; Anwar, Z.; Malik, A.W.; Trabelsi, Z. Airborne Computing: A Toolkit for UAV-Assisted Federated Computing for Sustainable Smart Cities. IEEE Internet Things J. 2023, 10. [Google Scholar] [CrossRef]
- Gupta, A.; Gupta, S.K. A Survey on Green Unmanned Aerial Vehicles-based Fog Computing: Challenges and Future Perspective. Trans. Emerg. Telecommun. Technol. 2022, 33, e4603. [Google Scholar] [CrossRef]
- Devraj; Rao, R.S.; Das, S. Fog computing environment in flying ad-hoc networks. In Cloud Computing Enabled Big-Data Analytics in Wireless Ad-Hoc Networks; CRC Press: Boca Raton, FL, USA, 2022; pp. 31–48. ISBN 9781003206453. [Google Scholar]
- Fernando, N.; Loke, S.W.; Avazpour, I.; Chen, F.-F.; Abkenar, A.B.; Ibrahim, A. Opportunistic Fog for IoT: Challenges and Opportunities. IEEE Internet Things J. 2019, 6, 8897–8910. [Google Scholar] [CrossRef]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog computing and its role in the Internet of Things. In Proceedings of the 1st Edition of the MCC Workshop on Mobile Cloud Computing, Helsinki, Finland, 17 August 2012; ACM: New York, NY, USA, 2012. [Google Scholar]
- Verma, U.; Bhardwaj, D. Fog Computing paradigm for Internet of Things: Architectures, issues, challenges, and applications. In Lecture Notes in Networks and Systems; Springer Nature Singapore: Singapore, 2022; pp. 1–11. ISBN 9789811910173. [Google Scholar]
- Hazra, A.; Adhikari, M.; Amgoth, T.; Srirama, S.N. Fog Computing for Energy-Efficient Data Offloading of IoT Applications in Industrial Sensor Networks. IEEE Sens. J. 2022, 22, 8663–8671. [Google Scholar] [CrossRef]
- Kumari, N.; Yadav, A.; Jana, P.K. Task Offloading in Fog Computing: A Survey of Algorithms and Optimization Techniques. Comput. Netw. 2022, 214, 109137. [Google Scholar] [CrossRef]
- Gasmi, K.; Dilek, S.; Tosun, S.; Ozdemir, S. A Survey on Computation Offloading and Service Placement in Fog Computing-Based IoT. J. Supercomput. 2022, 78, 1983–2014. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, J.; Hu, J.; Wan, S.; Huang, J. Distributed Task Offloading and Resource Purchasing in NOMA-Enabled Mobile Edge Computing: Hierarchical Game Theoretical Approaches. ACM Trans. Embed. Comput. Syst. 2023, 14. [Google Scholar] [CrossRef]
- Wadhwa, H.; Aron, R. Optimized Task Scheduling and Preemption for Distributed Resource Management in Fog-Assisted IoT Environment. J. Supercomput. 2023, 79, 2212–2250. [Google Scholar] [CrossRef]
- Ataie, I.; Taami, T.; Azizi, S.; Mainuddin, M.; Schwartz, D. D2FO: Distributed dynamic offloading mechanism for time-sensitive tasks in Fog-Cloud IoT-based systems. In Proceedings of the 2022 IEEE International Performance, Computing, and Communications Conference (IPCCC), Austin, TX, USA, 11–13 November 2022; pp. 360–366. [Google Scholar]
- Tran-Dang, H.; Kim, D.-S. Dynamic Collaborative Task Offloading for Delay Minimization in the Heterogeneous Fog Computing Systems. J. Commun. Netw. 2023, 25, 244–252. [Google Scholar] [CrossRef]
- Shahzad, H.; Szymanski, T.H. A dynamic programming offloading algorithm for mobile cloud computing. In Proceedings of the 2016 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Vancouver, BC, Canada, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Wang, B.; Lv, B.; Song, Y. A Hybrid Genetic Algorithm with Integer Coding for Task Offloading in Edge-Cloud Cooperative Computing. IAENG Int. J. Comput. Sci. 2022, 49, 503–510. [Google Scholar]
- Reddy, P.B.; Sudhakar, C. An Osmotic Approach-Based Dynamic Deadline-Aware Task Offloading in Edge–Fog–Cloud Computing Environment. J. Supercomput. 2023, 1–23. [Google Scholar] [CrossRef]
- Lakhan, A.; Mohammed, M.A.; Obaid, O.I.; Chakraborty, C.; Abdulkareem, K.H.; Kadry, S. Efficient Deep-Reinforcement Learning Aware Resource Allocation in SDN-Enabled Fog Paradigm. Autom. Softw. Eng. 2022, 29, 20. [Google Scholar] [CrossRef]
- Thanedar, M.A.; Panda, S.K. A Dynamic Resource Management Algorithm for Maximizing Service Capability in Fog-Empowered Vehicular Ad-Hoc Networks. Peer Peer Netw. Appl. 2023, 16, 932–946. [Google Scholar] [CrossRef]
- Hosseini, E.; Nickray, M.; Ghanbari, S. Optimized Task Scheduling for Cost-Latency Trade-off in Mobile Fog Computing Using Fuzzy Analytical Hierarchy Process. Comput. Netw. 2022, 206, 108752. [Google Scholar] [CrossRef]
- Yao, J.; Ansari, N. Online Task Allocation and Flying Control in Fog-Aided Internet of Drones. IEEE Trans. Veh. Technol. 2020, 69, 5562–5569. [Google Scholar] [CrossRef]
- Serdaroglu, K.C.; Baydere, Ş.; Saovapakhiran, B.; Charnsripinyo, C. Location aware fog computing based air quality monitoring system. In Proceedings of the 2023 International Conference on Smart Applications, Communications and Networking (SmartNets), Istanbul, Turkiye, 25–27 July 2023. [Google Scholar]
- Khuwaja, A.A.; Chen, Y.; Andreou, A.; Mavromoustakis, C.X.; Batalla, J.M.; Markakis, E.K.; Mastorakis, G.; Mumtaz, S. UAV Trajectory Optimisation in Smart Cities using Modified A* Algorithm Combined with Haversine and Vincenty Formulas. IEEE Trans. Veh. Technol. 2023, 72, 9757–9769. [Google Scholar]
- Zhao, N.; Alouini, M.-S.; Dobbins, P. A Survey of Channel Modeling for UAV Communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.T.; Lee, S.; Joo, H.; Kim, H. Survey on Anti-Drone Systems: Components, Designs, and Challenges. IEEE Access 2021, 9, 42635–42659. [Google Scholar] [CrossRef]
- Khakimov, A.; Mokrov, E.; Poluektov, D.; Samouylov, K.; Koucheryavy, A. Evaluating the Quality of Experience Performance Metric for UAV-Based Networks. Sensors 2021, 21, 5689. [Google Scholar] [CrossRef]
- Kafetzis, D.; Vassilaras, S.; Vardoulias, G.; Koutsopoulos, I. Software-Defined Networking Meets Software-Defined Radio in Mobile Ad Hoc Networks: State of the Art and Future Directions. IEEE Access 2022, 10, 9989–10014. [Google Scholar] [CrossRef]
- USRP-2954 Specifications. Available online: https://www.ni.com/docs/en-US/bundle/usrp-2954-specs/page/specs.html (accessed on 25 July 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Nf | 5 |
| Si | ϵ [10–30] MB |
| Nr | 5 |
| Ci | 1900 Cycle/s |
| Ticonstraint | 2 ms |
| RIoT,Drone, RDrone, IoT, RDrone-MEC | ϵ [3–9] Mbps |
| ωfog | ϵ [0.5–3] GHz |
| ωMEC | ϵ [12–15] GHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Min, W.; Khakimov, A.; Ateya, A.A.; ElAffendi, M.; Muthanna, A.; Abd El-Latif, A.A.; Muthanna, M.S.A. Dynamic Offloading in Flying Fog Computing: Optimizing IoT Network Performance with Mobile Drones. Drones 2023, 7, 622. https://doi.org/10.3390/drones7100622
Min W, Khakimov A, Ateya AA, ElAffendi M, Muthanna A, Abd El-Latif AA, Muthanna MSA. Dynamic Offloading in Flying Fog Computing: Optimizing IoT Network Performance with Mobile Drones. Drones. 2023; 7(10):622. https://doi.org/10.3390/drones7100622
Chicago/Turabian StyleMin, Wei, Abdukodir Khakimov, Abdelhamied A. Ateya, Mohammed ElAffendi, Ammar Muthanna, Ahmed A. Abd El-Latif, and Mohammed Saleh Ali Muthanna. 2023. "Dynamic Offloading in Flying Fog Computing: Optimizing IoT Network Performance with Mobile Drones" Drones 7, no. 10: 622. https://doi.org/10.3390/drones7100622
APA StyleMin, W., Khakimov, A., Ateya, A. A., ElAffendi, M., Muthanna, A., Abd El-Latif, A. A., & Muthanna, M. S. A. (2023). Dynamic Offloading in Flying Fog Computing: Optimizing IoT Network Performance with Mobile Drones. Drones, 7(10), 622. https://doi.org/10.3390/drones7100622