
Real-Time Object Detection Based on UAV Remote Sensing: A Systematic Literature Review




Abstract
:1. Introduction
2. Methodology
2.1. Research Questions
2.2. Search Process
2.3. Inclusion and Exclusion Criteria
- Articles that discussed real-time object detection tasks or algorithms that are applied to UAV remote sensing;
- Articles that specifically mentioned onboard real-time processing and used optic sensors.
2.4. Data Extraction
2.5. Data Synthesis
3. Analysis of Selected Publications
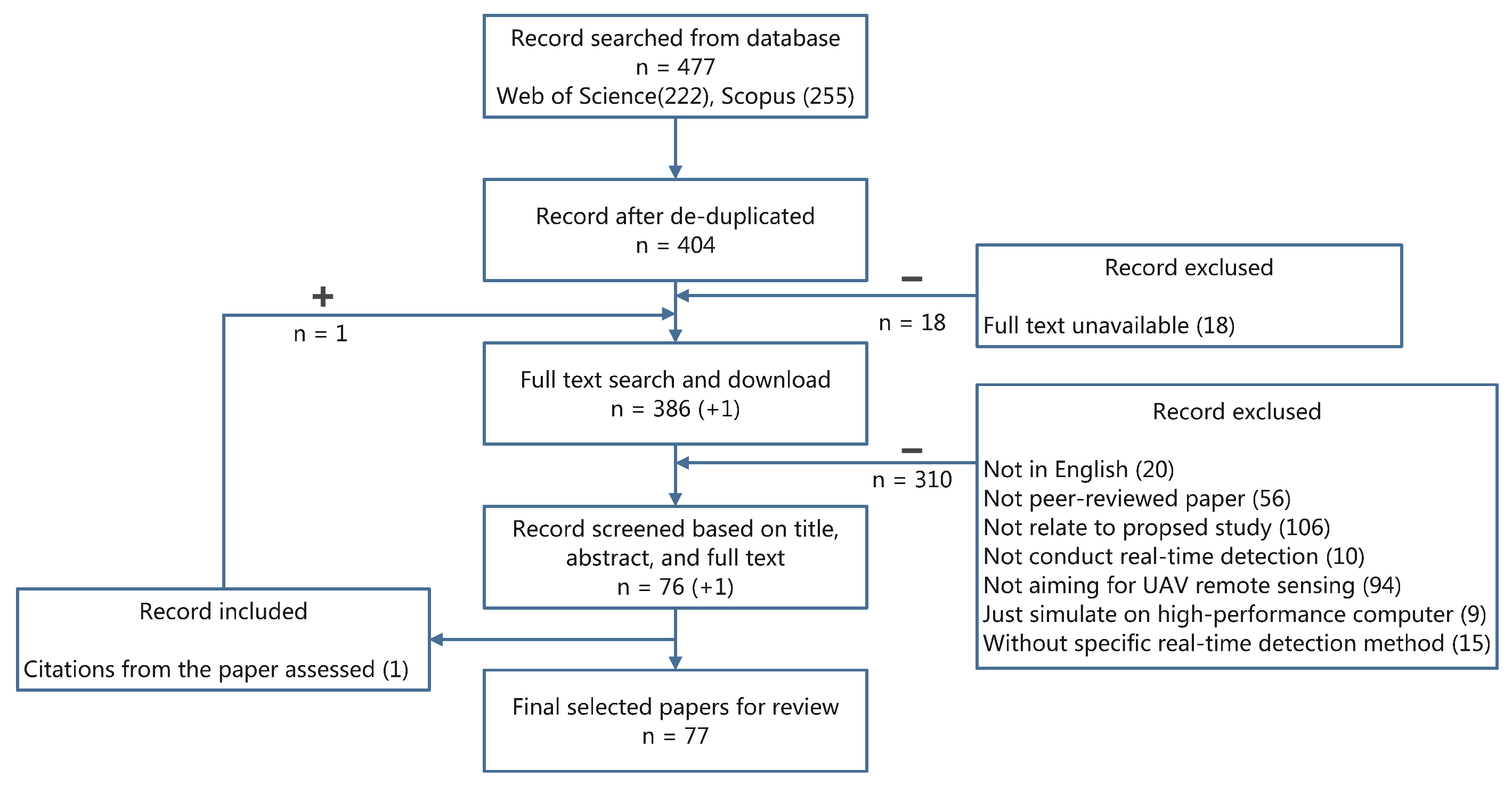
3.1. Study Selection
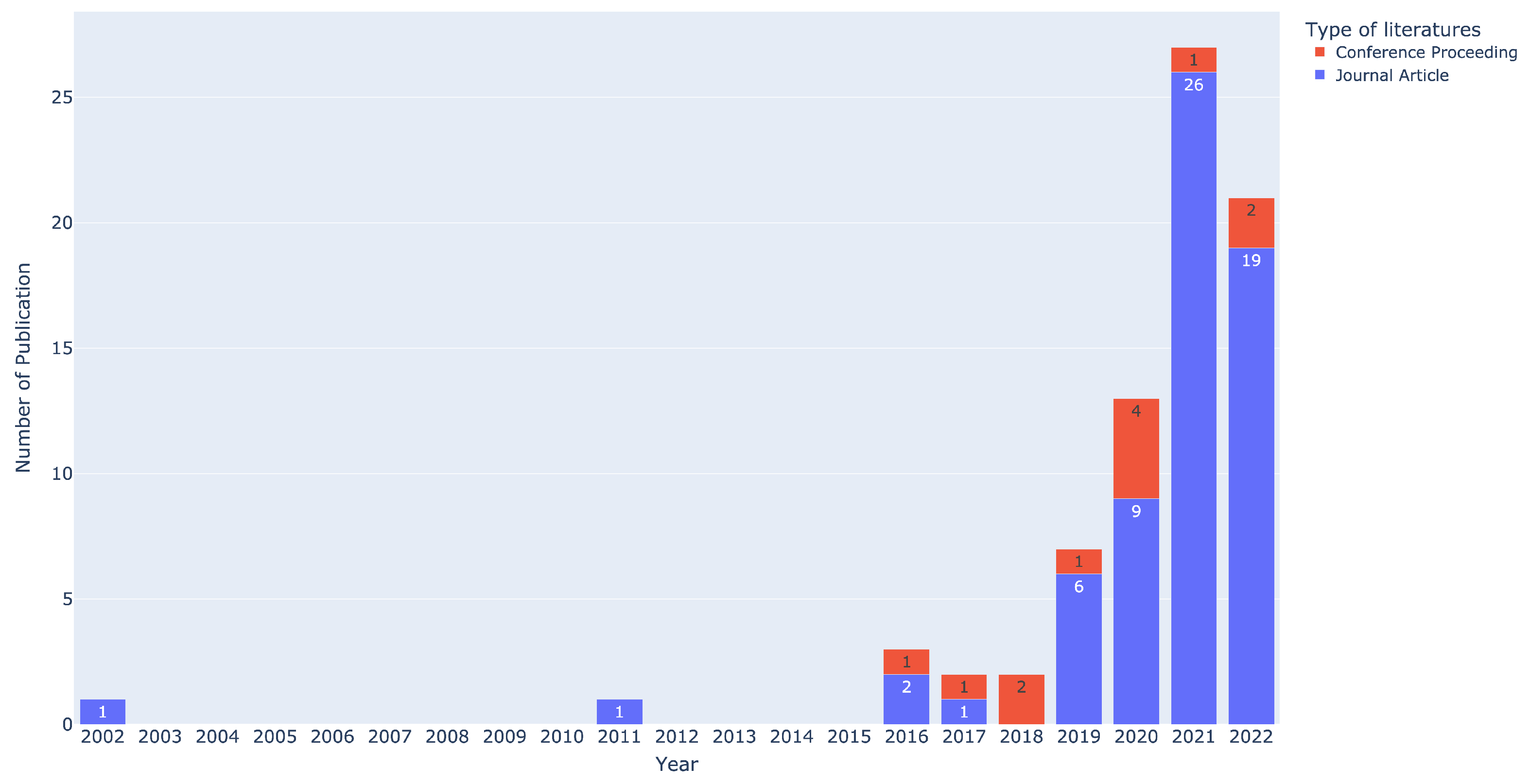
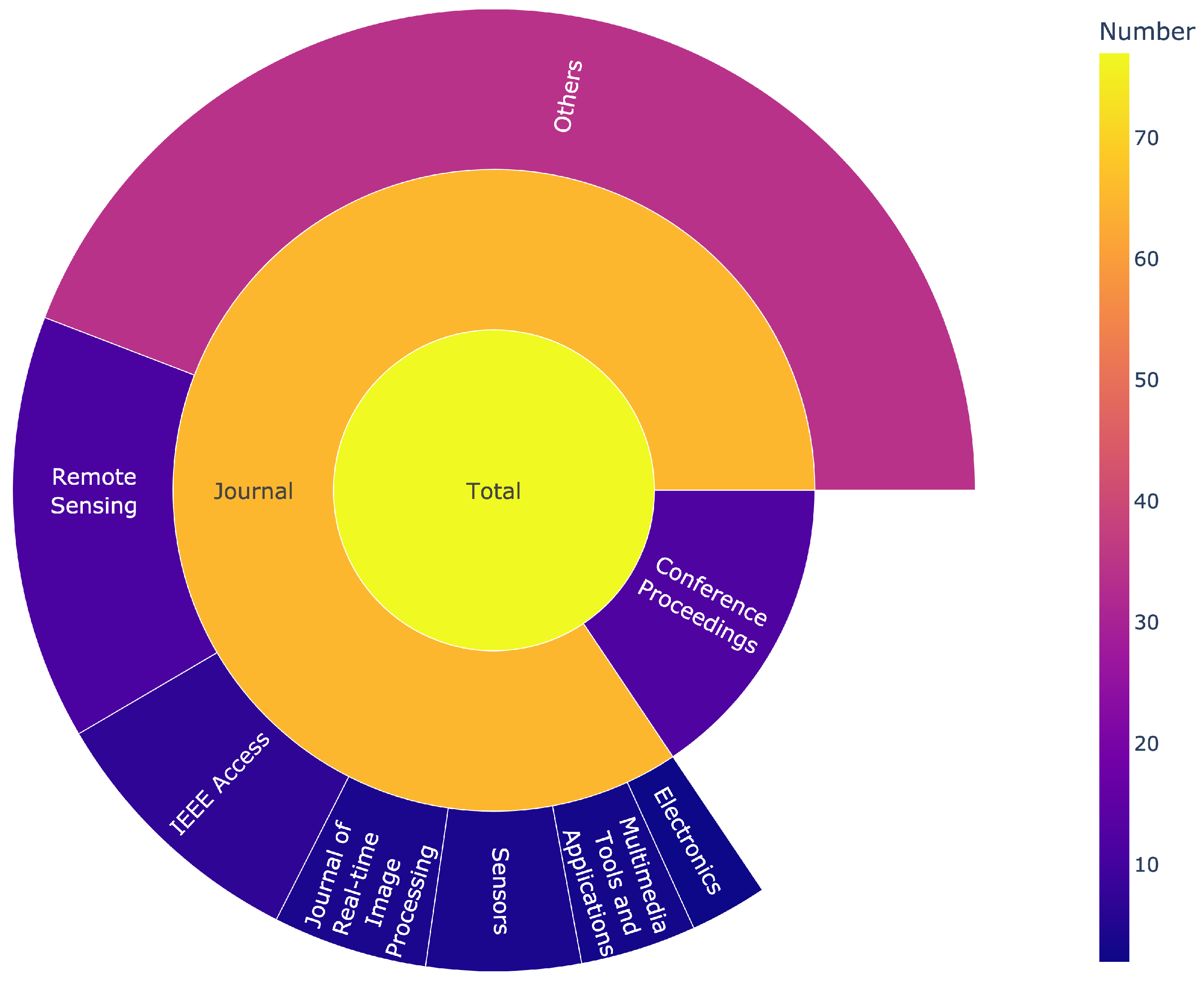
3.2. Overview of Reviewed Publications
4. Results
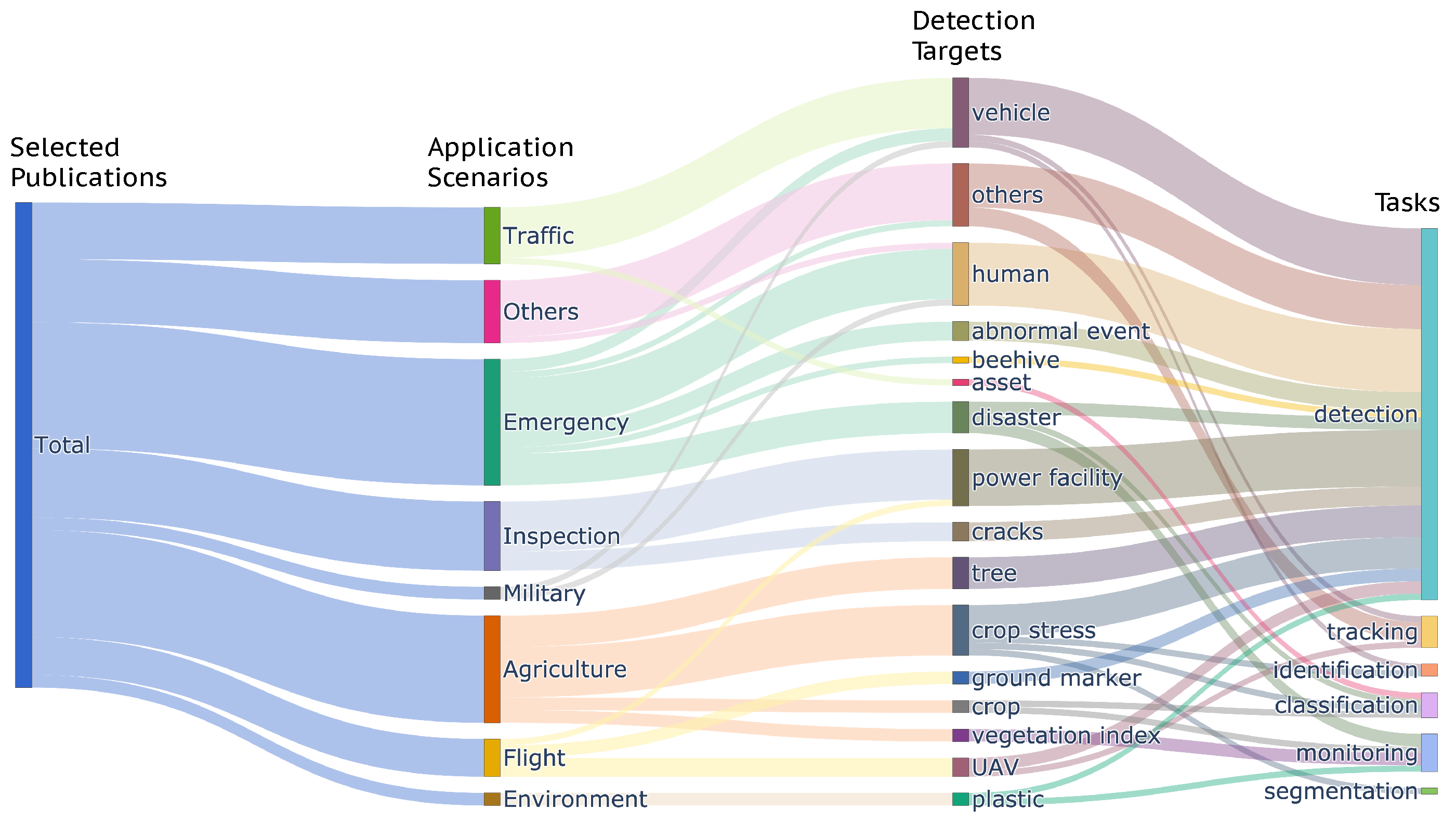
4.1. Application Scenarios and Tasks of Real-Time Object Detection
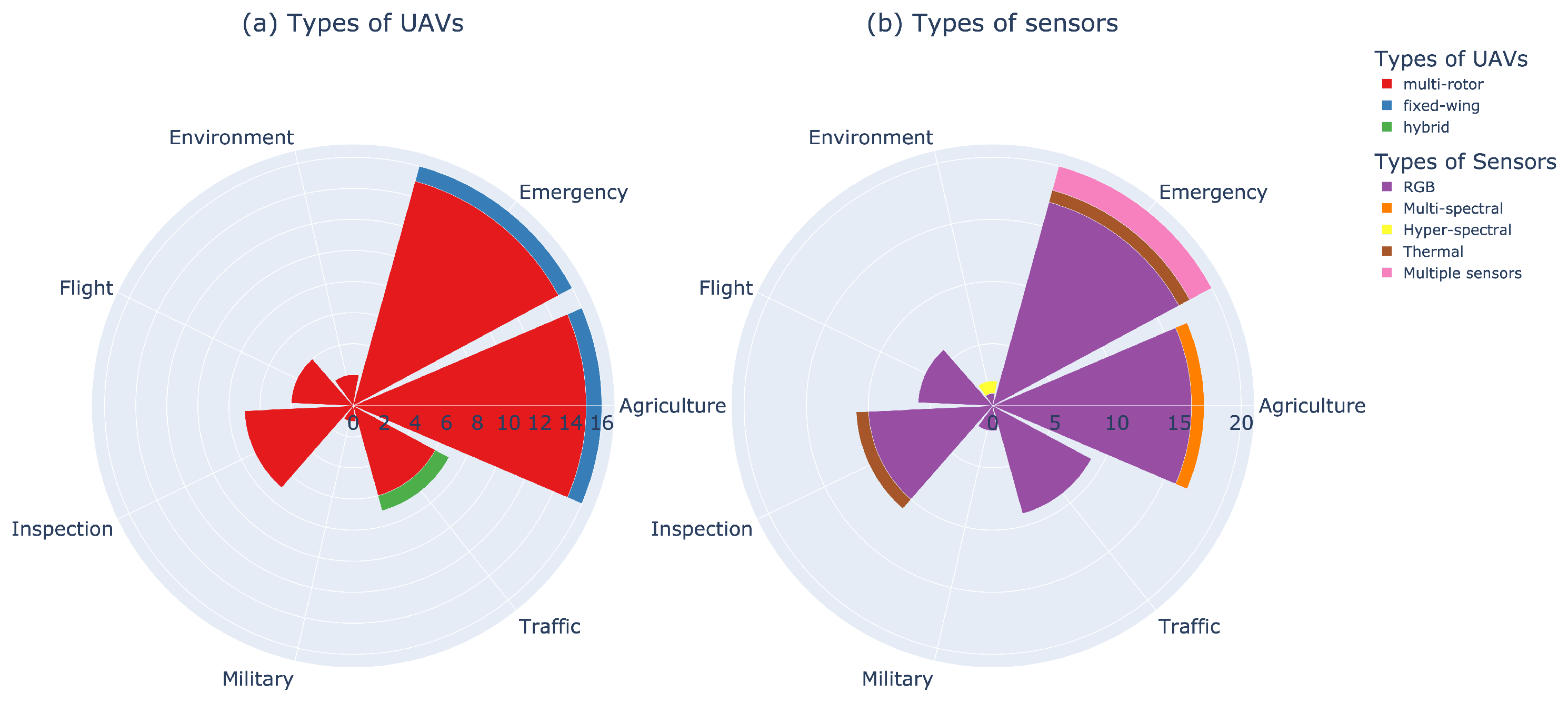
4.2. UAV Platforms and Sensors for Different Real-Time Detection Applications
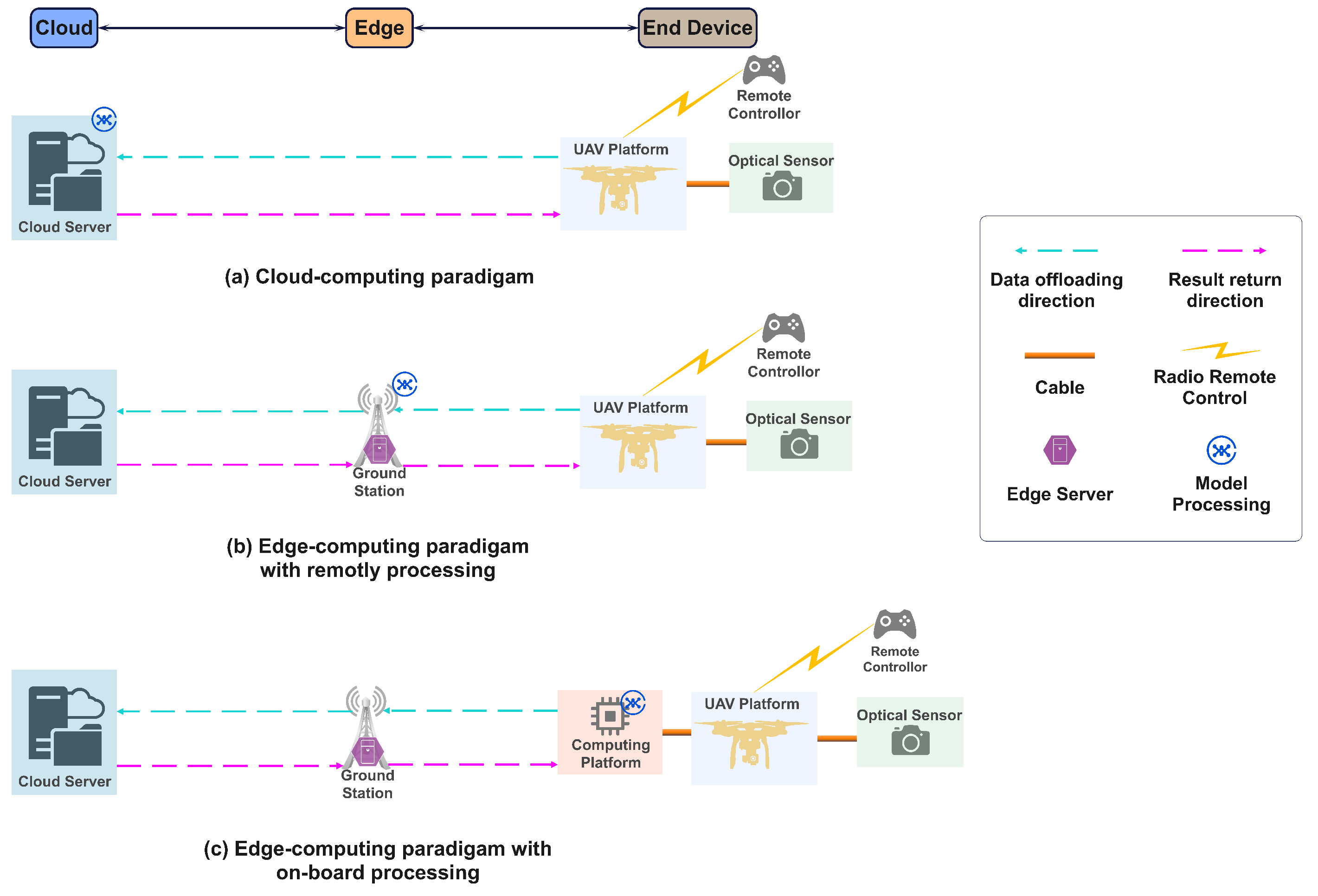
4.3. Two Paradigms for Real-Time Detection
- One form where the edge end is unable to perform large computations; it just processes partial data and then offloades to the edge server (ground station) for processing. Figure 7b shows the paradigm of edge computing in this form. In this case, the so-called ground station is a generic name and usually is a high-performance computing platform, such as a laptop [59], mobile phone [48,51] or single-board [57].
- Another form where the edge end is also the edge server, which has the capability of processing data while collecting data. This paradigm can be seen in Figure 7c. There are many of these forms of edge computing in our review [31,34,58,84,94], which integrated sensors and embedded computing platforms onto the UAV and treated them as a whole, which is the edge end. During the flight of the UAV, the images are captured and processed simultaneously to obtain the detection results.
4.4. Computing Platforms Used for Edge Computing
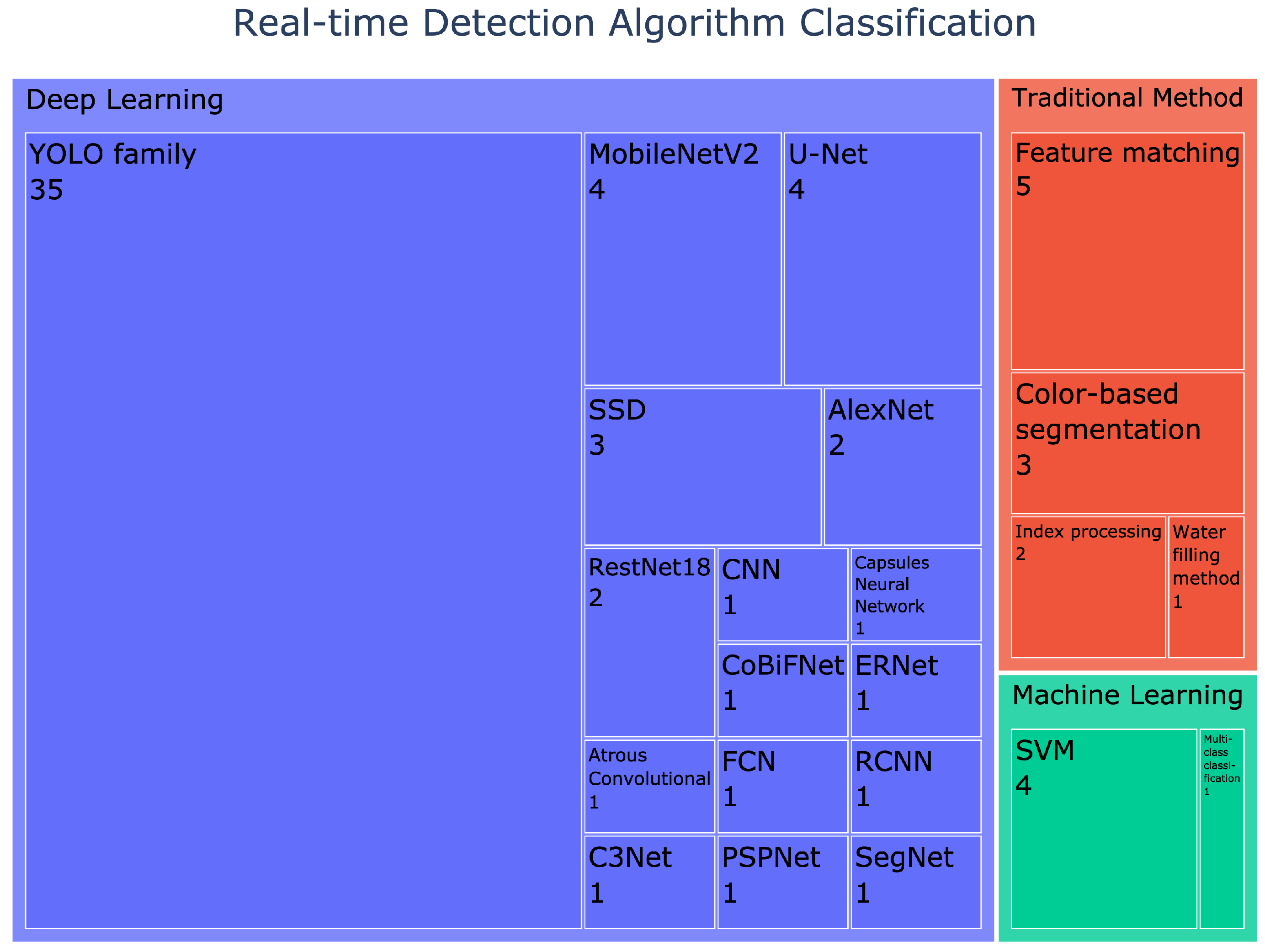
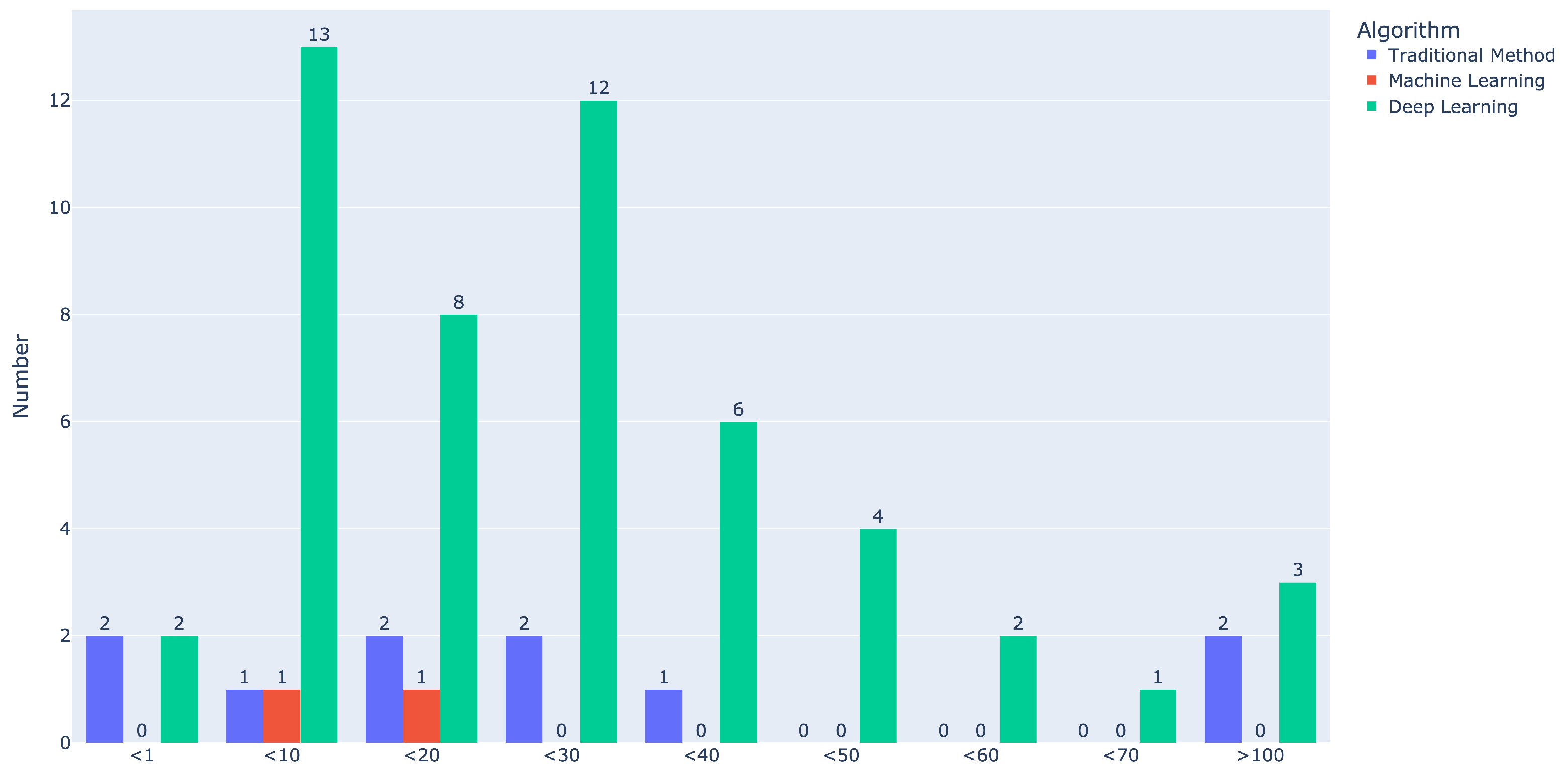
4.5. Real-Time Object Detection Algorithms
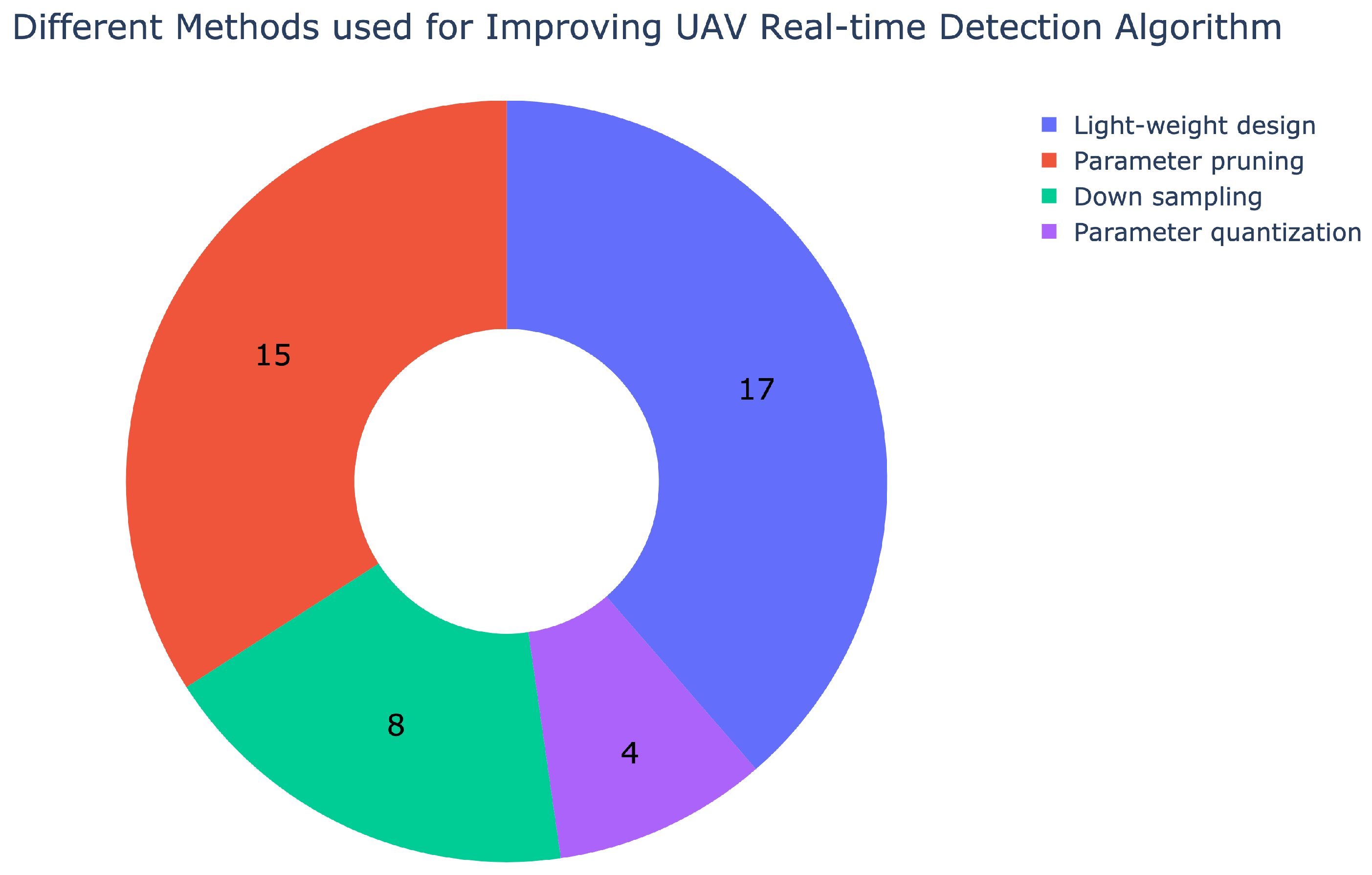
4.6. Technologies Used for Improving UAV Real-Time Object Detection Algorithms
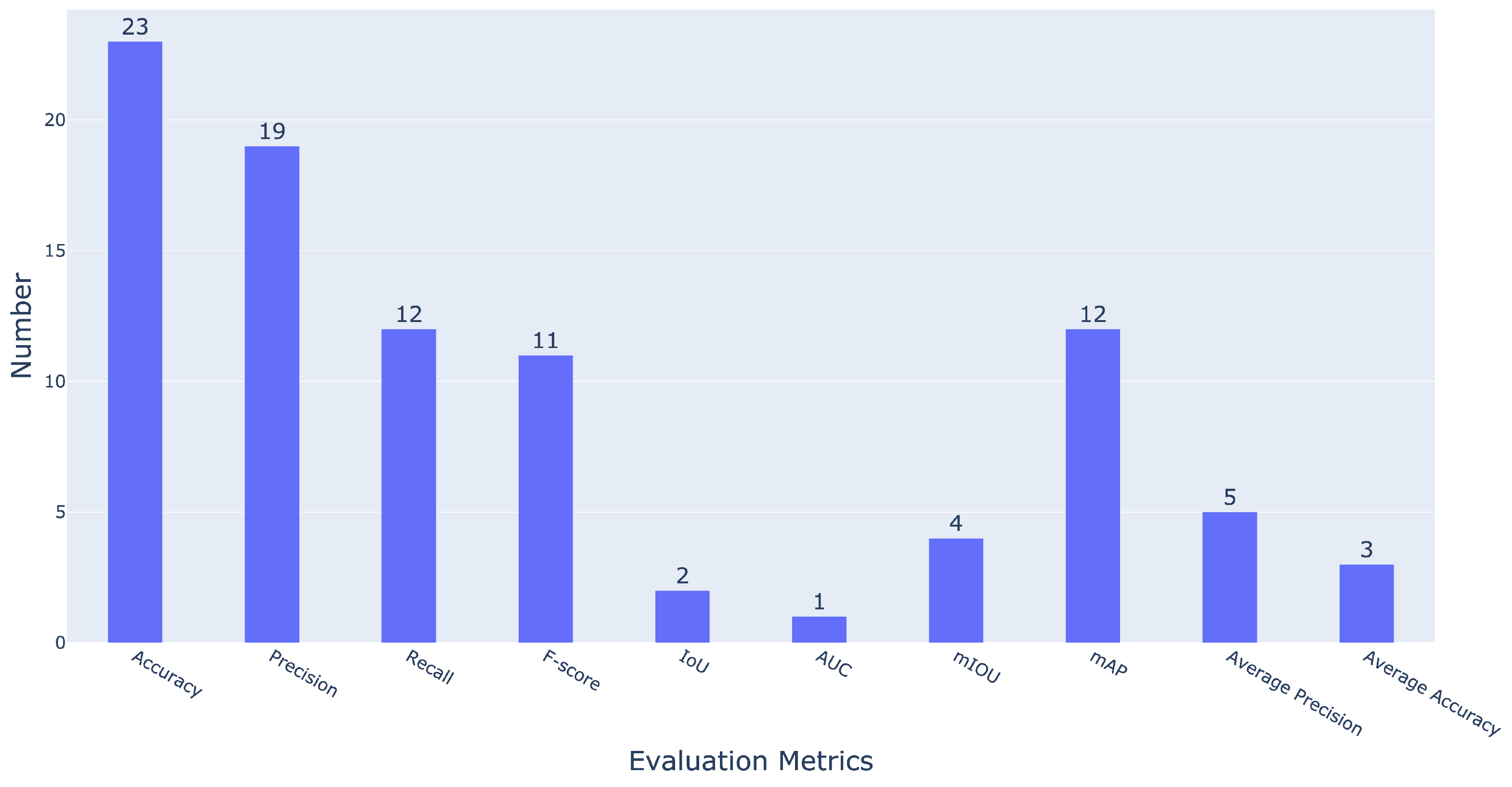
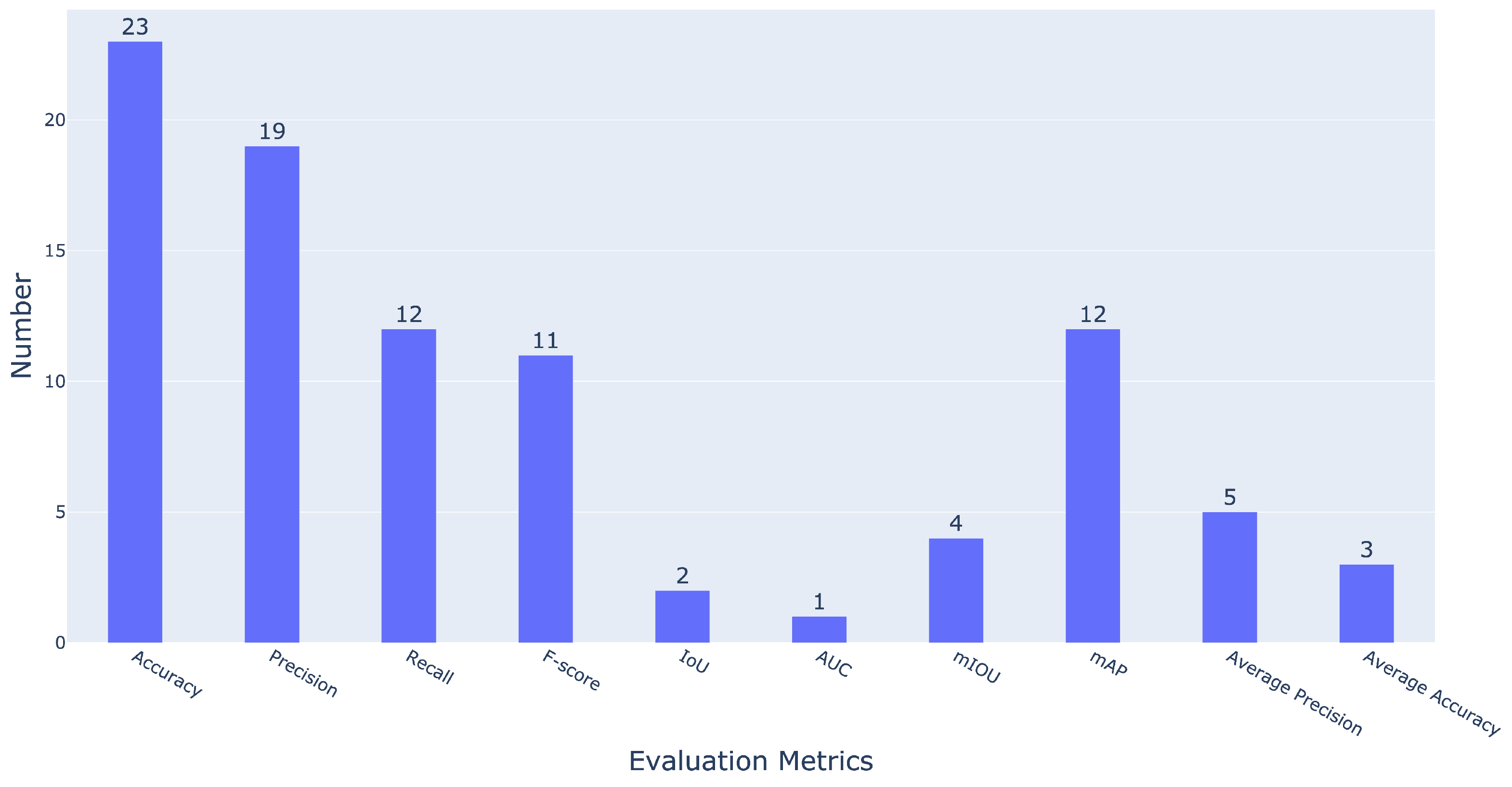
4.7. UAV Real-Time Object Detection Evaluation
4.7.1. Accuracy
4.7.2. Speed
4.7.3. Latency
4.7.4. Energy Consumption
5. Discussion
5.1. Current Challenges
5.1.1. Sensor Usage for UAV Real-Time Object Detection
5.1.2. Edge Computing Paradigm for UAV Real-Time Object Detection
5.1.3. Lightweight Real-Time Object Detection Algorithms Based on UAVs
5.1.4. Other Challenges for Real-Time Object Detection on UAV Remote Sensing
5.2. Future Outlook
5.2.1. Autonomous UAV Real-Time Object Detection
5.2.2. Communication in Real-Time Object Detection Based on UAV Remote Sensing
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, X.; Smith, A.; Bourchier, R.; Hodge, K.; Ostrander, D.; Houston, B. Mapping flowering leafy spurge infestations in a heterogeneous landscape using unmanned aerial vehicle Red-Green-Blue images and a hybrid classification method. Int. J. Remote Sens. 2021, 42, 8930–8951. [Google Scholar]
- Feng, J.; Wang, J.; Qin, R. Lightweight detection network for arbitrary-oriented vehicles in UAV imagery via precise positional information encoding and bidirectional feature fusion. Int. J. Remote Sens. 2023, 44, 1–30. [Google Scholar]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Shvetsova, S.V.; Alhartomi, M.A.; Hawbani, A.; Rajput, N.S.; Srivastava, S.; Saif, A.; Nyangaresi, V.O. UAV computing-assisted search and rescue mission framework for disaster and harsh environment mitigation. Drones 2022, 6, 154. [Google Scholar] [CrossRef]
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the advent of the twenties: Where we stand and what is next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar]
- Chabot, D. Trends in drone research and applications as the Journal of Unmanned Vehicle Systems turns five. J. Unmanned Veh. Syst. 2018, 6, vi–xv. [Google Scholar] [CrossRef]
- Zou, Z.; Chen, K.; Shi, Z.; Guo, Y.; Ye, J. Object detection in 20 years: A survey. Proc. IEEE 2023, 111, 257–276. [Google Scholar]
- Aposporis, P. Object detection methods for improving UAV autonomy and remote sensing applications. In Proceedings of the 2020 IEEE/ACM International Conference on Advances in Social Networks Analysis and Mining (ASONAM), Virtual, 7–10 December 2020; pp. 845–853. [Google Scholar]
- Ghaffarian, S.; Valente, J.; Van Der Voort, M.; Tekinerdogan, B. Effect of attention mechanism in deep learning-based remote sensing image processing: A systematic literature review. Remote Sens. 2021, 13, 2965. [Google Scholar]
- Cazzato, D.; Cimarelli, C.; Sanchez-Lopez, J.L.; Voos, H.; Leo, M. A survey of computer vision methods for 2d object detection from unmanned aerial vehicles. J. Imaging 2020, 6, 78. [Google Scholar]
- Osco, L.P.; Junior, J.M.; Ramos, A.P.M.; de Castro Jorge, L.A.; Fatholahi, S.N.; de Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalves, W.N.; Li, J. A review on deep learning in UAV remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar]
- Pathak, A.R.; Pandey, M.; Rautaray, S. Application of deep learning for object detection. Procedia Comput. Sci. 2018, 132, 1706–1717. [Google Scholar]
- Tetila, E.C.; Machado, B.B.; Menezes, G.K.; Oliveira, A.d.S.; Alvarez, M.; Amorim, W.P.; Belete, N.A.D.S.; Da Silva, G.G.; Pistori, H. Automatic recognition of soybean leaf diseases using UAV images and deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2019, 17, 903–907. [Google Scholar]
- Feng, Q.; Liu, J.; Gong, J. UAV remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.N.; et al. Individual tree detection and classification with UAV-based photogrammetric point clouds and hyperspectral imaging. Remote Sens. 2017, 9, 185. [Google Scholar]
- Byun, S.; Shin, I.K.; Moon, J.; Kang, J.; Choi, S.I. Road traffic monitoring from UAV images using deep learning networks. Remote Sens. 2021, 13, 4027. [Google Scholar] [CrossRef]
- Sherstjuk, V.; Zharikova, M.; Sokol, I. Forest fire-fighting monitoring system based on UAV team and remote sensing. In Proceedings of the 2018 IEEE 38th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 22–24 April 2018; pp. 663–668. [Google Scholar]
- Tijtgat, N.; Ranst, W.V.; Volckaert, B.; Goedemé, T.; Turck, F.D. Embedded Real-Time Object Detection for a UAV Warning System. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 2110–2118. [Google Scholar] [CrossRef]
- Deng, J.; Zhong, Z.; Huang, H.; Lan, Y.; Han, Y.; Zhang, Y. Lightweight semantic segmentation network for real-time weed mapping using unmanned aerial vehicles. Appl. Sci. 2020, 10, 7132. [Google Scholar]
- Ayalew, A.; Pooja. A review on object detection from Unmanned Aerial Vehicle using CNN. Int. J. Adv. Res. Ideas Innov. Technol. 2019, 5, 241–243. [Google Scholar]
- Borghi, R.; Gori, F.; Guattari, G.; Santarsiero, M. Shape-invariant difference between two Gaussian Schell-model beams. JOSA A 2015, 32, 790–796. [Google Scholar]
- Liu, J.; Xiang, J.; Jin, Y.; Liu, R.; Yan, J.; Wang, L. Boost precision agriculture with unmanned aerial vehicle remote sensing and edge intelligence: A survey. Remote Sens. 2021, 13, 4387. [Google Scholar]
- Ramachandran, A.; Sangaiah, A.K. A review on object detection in unmanned aerial vehicle surveillance. Int. J. Cogn. Comput. Eng. 2021, 2, 215–228. [Google Scholar] [CrossRef]
- Kitchenham, B.; Brereton, O.P.; Budgen, D.; Turner, M.; Bailey, J.; Linkman, S. Systematic literature reviews in software engineering–a systematic literature review. Inf. Softw. Technol. 2009, 51, 7–15. [Google Scholar]
- Kitchenham, B. Procedures for Performing Systematic Reviews. Keele UK Keele Univ. 2004, 33, 1–26. [Google Scholar]
- Krul, S.; Pantos, C.; Frangulea, M.; Valente, J. Visual SLAM for indoor livestock and farming using a small drone with a monocular camera: A feasibility study. Drones 2021, 5, 41. [Google Scholar] [CrossRef]
- Li, Z.; Namiki, A.; Suzuki, S.; Wang, Q.; Zhang, T.; Wang, W. Application of low-altitude UAV remote sensing image object detection based on improved YOLOv5. Appl. Sci. 2022, 12, 8314. [Google Scholar] [CrossRef]
- Meng, L.; Peng, Z.; Zhou, J.; Zhang, J.; Lu, Z.; Baumann, A.; Du, Y. Real-time detection of ground objects based on unmanned aerial vehicle remote sensing with deep learning: Application in excavator detection for pipeline safety. Remote Sens. 2020, 12, 182. [Google Scholar] [CrossRef]
- Canals, R.; Roussel, A.; Famechon, J.L.; Treuillet, S. A biprocessor-oriented vision-based target tracking system. IEEE Trans. Ind. Electron. 2002, 49, 500–506. [Google Scholar] [CrossRef]
- Ayoub, N.; Schneider-Kamp, P. Real-time on-board deep learning fault detection for autonomous UAV inspections. Electronics 2021, 10, 1091. [Google Scholar] [CrossRef]
- Yavariabdi, A.; Kusetogullari, H.; Celik, T.; Cicek, H. FastUAV-net: A multi-UAV detection algorithm for embedded platforms. Electronics 2021, 10, 724. [Google Scholar] [CrossRef]
- Alam, M.S.; Natesha, B.; Ashwin, T.; Guddeti, R.M.R. UAV based cost-effective real-time abnormal event detection using edge computing. Multimed. Tools Appl. 2019, 78, 35119–35134. [Google Scholar] [CrossRef]
- Gupta, P.; Pareek, B.; Singal, G.; Rao, D.V. Edge device based military vehicle detection and classification from uav. Multimed. Tools Appl. 2022, 81, 19813–19834. [Google Scholar] [CrossRef]
- Yang, Y.; Han, J. Real-Time object detector based MobileNetV3 for UAV applications. Multimed. Tools Appl. 2022, 82, 18709–18725. [Google Scholar] [CrossRef]
- Broekman, A.; Gräbe, P.J.; Wynand, J. Real-time traffic quantization using a mini edge artificial intelligence platform. Transp. Eng. 2021, 4, 100068. [Google Scholar] [CrossRef]
- Ma, D.; Fang, H.; Wang, N.; Zhang, C.; Dong, J.; Hu, H. Automatic detection and counting system for pavement cracks based on PCGAN and YOLO-MF. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22166–22178. [Google Scholar] [CrossRef]
- Mohan, S.; Shoghli, O.; Burde, A.; Tabkhi, H. Low-power drone-mountable real-time artificial intelligence framework for road asset classification. Transp. Res. Rec. 2021, 2675, 39–48. [Google Scholar] [CrossRef]
- Battistone, F.; Petrosino, A.; Santopietro, V. Watch out: Embedded video tracking with BST for unmanned aerial vehicles. J. Signal Process. Syst. 2018, 90, 891–900. [Google Scholar] [CrossRef]
- Deng, J.; Shi, Z.; Zhuo, C. Energy-efficient real-time UAV object detection on embedded platforms. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2019, 39, 3123–3127. [Google Scholar] [CrossRef]
- Koubâa, A.; Ammar, A.; Alahdab, M.; Kanhouch, A.; Azar, A.T. Deepbrain: Experimental evaluation of cloud-based computation offloading and edge computing in the internet-of-drones for deep learning applications. Sensors 2020, 20, 5240. [Google Scholar] [CrossRef]
- Rabah, M.; Rohan, A.; Haghbayan, M.H.; Plosila, J.; Kim, S.H. Heterogeneous parallelization for object detection and tracking in UAVs. IEEE Access 2020, 8, 42784–42793. [Google Scholar] [CrossRef]
- Hua, X.; Wang, X.; Rui, T.; Shao, F.; Wang, D. Light-weight UAV object tracking network based on strategy gradient and attention mechanism. Knowl.-Based Syst. 2021, 224, 107071. [Google Scholar] [CrossRef]
- Kyrkou, C. C^3 Net C 3 Net: End-to-end deep learning for efficient real-time visual active camera control. J. Real-Time Image Process. 2021, 18, 1421–1433. [Google Scholar] [CrossRef]
- Liu, J.; Hu, C.; Zhou, J.; Ding, W. Object Detection Algorithm Based on Lightweight YOLOv4 for UAV. In Proceedings of the 2022 7th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 15–17 April 2022; pp. 425–429. [Google Scholar]
- Shen, H.; Lin, D.; Song, T. A real-time siamese tracker deployed on UAVs. J. Real-Time Image Process. 2022, 19, 463–473. [Google Scholar] [CrossRef]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised human detection with an embedded vision system on a fully autonomous UAV for search and rescue operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef]
- Rangel, R.K.; Terra, A.C. Development of a Surveillance tool using UAV’s. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–11. [Google Scholar]
- Hossain, S.; Lee, D.j. Deep learning-based real-time multiple-object detection and tracking from aerial imagery via a flying robot with GPU-based embedded devices. Sensors 2019, 19, 3371. [Google Scholar] [CrossRef]
- Barnawi, A.; Chhikara, P.; Tekchandani, R.; Kumar, N.; Alzahrani, B. Artificial intelligence-enabled Internet of Things-based system for COVID-19 screening using aerial thermal imaging. Future Gener. Comput. Syst. 2021, 124, 119–132. [Google Scholar] [CrossRef]
- Golcarenarenji, G.; Martinez-Alpiste, I.; Wang, Q.; Alcaraz-Calero, J.M. Efficient real-time human detection using unmanned aerial vehicles optical imagery. Int. J. Remote Sens. 2021, 42, 2440–2462. [Google Scholar] [CrossRef]
- Li, J.; Peng, Y.; Jiang, T. Embedded real-time infrared and visible image fusion for UAV surveillance. J. Real-Time Image Process. 2021, 18, 2331–2345. [Google Scholar] [CrossRef]
- Martinez-Alpiste, I.; Golcarenarenji, G.; Wang, Q.; Alcaraz-Calero, J.M. Search and rescue operation using UAVs: A case study. Expert Syst. Appl. 2021, 178, 114937. [Google Scholar] [CrossRef]
- Othman, N.A.; Aydin, I. A Low-Cost Embedded Security System for UAV-Based Face Mask Detector Using IoT and Deep Learning to Reduce COVID-19. In Proceedings of the 2022 International Conference on Decision Aid Sciences and Applications (DASA), Chiangrai, Thailand, 23–25 March 2022; pp. 693–697. [Google Scholar]
- Hernández, D.; Cecilia, J.M.; Cano, J.C.; Calafate, C.T. Flood detection using real-time image segmentation from unmanned aerial vehicles on edge-computing platform. Remote Sens. 2022, 14, 223. [Google Scholar] [CrossRef]
- Kyrkou, C.; Theocharides, T. Deep-Learning-Based Aerial Image Classification for Emergency Response Applications Using Unmanned Aerial Vehicles. In Proceedings of the CVPR Workshops, Long Beach, CA, USA, 16–19 June 2019; pp. 517–525. [Google Scholar]
- Kyrkou, C.; Theocharides, T. EmergencyNet: Efficient aerial image classification for drone-based emergency monitoring using atrous convolutional feature fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1687–1699. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, J.; Ta, N.; Zhao, X.; Xiao, M.; Wei, H. A real-time deep learning forest fire monitoring algorithm based on an improved Pruned+ KD model. J. Real-Time Image Process. 2021, 18, 2319–2329. [Google Scholar] [CrossRef]
- Yuan, C.; Ghamry, K.A.; Liu, Z.; Zhang, Y. Unmanned aerial vehicle based forest fire monitoring and detection using image processing technique. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 29–31 July 2016; pp. 1870–1875. [Google Scholar]
- Castellano, G.; Castiello, C.; Mencar, C.; Vessio, G. Crowd detection in aerial images using spatial graphs and fully-convolutional neural networks. IEEE Access 2020, 8, 64534–64544. [Google Scholar] [CrossRef]
- Chen, N.; Chen, Y. Anomalous vehicle recognition in smart urban traffic monitoring as an edge service. Future Internet 2022, 14, 54. [Google Scholar] [CrossRef]
- Marques, M.M.; Lobo, V.; Aguiar, A.P.; Silva, J.E.; de Sousa, J.B.; de Fátima Nunes, M.; Ribeiro, R.A.; Bernardino, A.; Cruz, G.; Marques, J.S. An unmanned aircraft system for maritime operations: The automatic detection subsystem. Mar. Technol. Soc. J. 2021, 55, 38–49. [Google Scholar] [CrossRef]
- Li, F.; Liu, Z.; Shen, W.; Wang, Y.; Wang, Y.; Ge, C.; Sun, F.; Lan, P. A remote sensing and airborne edge-computing based detection system for pine wilt disease. IEEE Access 2021, 9, 66346–66360. [Google Scholar] [CrossRef]
- Lan, Y.; Lin, S.; Du, H.; Guo, Y.; Deng, X. Real-Time UAV Patrol Technology in Orchard Based on the Swin-T YOLOX Lightweight Model. Remote Sens. 2022, 14, 5806. [Google Scholar] [CrossRef]
- Yağ, İ.; Altan, A. Artificial Intelligence-Based Robust Hybrid Algorithm Design and Implementation for Real-Time Detection of Plant Diseases in Agricultural Environments. Biology 2022, 11, 1732. [Google Scholar] [CrossRef]
- Chen, C.J.; Huang, Y.Y.; Li, Y.S.; Chen, Y.C.; Chang, C.Y.; Huang, Y.M. Identification of fruit tree pests with deep learning on embedded drone to achieve accurate pesticide spraying. IEEE Access 2021, 9, 21986–21997. [Google Scholar] [CrossRef]
- de Camargo, T.; Schirrmann, M.; Landwehr, N.; Dammer, K.H.; Pflanz, M. Optimized deep learning model as a basis for fast UAV mapping of weed species in winter wheat crops. Remote Sens. 2021, 13, 1704. [Google Scholar] [CrossRef]
- Lan, Y.; Huang, K.; Yang, C.; Lei, L.; Ye, J.; Zhang, J.; Zeng, W.; Zhang, Y.; Deng, J. Real-time identification of rice weeds by uav low-altitude remote sensing based on improved semantic segmentation model. Remote Sens. 2021, 13, 4370. [Google Scholar] [CrossRef]
- Menshchikov, A.; Shadrin, D.; Prutyanov, V.; Lopatkin, D.; Sosnin, S.; Tsykunov, E.; Iakovlev, E.; Somov, A. Real-time detection of hogweed: UAV platform empowered by deep learning. IEEE Trans. Comput. 2021, 70, 1175–1188. [Google Scholar] [CrossRef]
- Saddik, A.; Latif, R.; El Ouardi, A. Low-Power FPGA Architecture Based Monitoring Applications in Precision Agriculture. J. Low Power Electron. Appl. 2021, 11, 39. [Google Scholar] [CrossRef]
- Saddik, A.; Latif, R.; El Ouardi, A.; Alghamdi, M.I.; Elhoseny, M. Improving Sustainable Vegetation Indices Processing on Low-Cost Architectures. Sustainability 2022, 14, 2521. [Google Scholar] [CrossRef]
- Kobayashi, T.; Yokogawa, T.; Igawa, N.; Satoh, Y.; Sugino, K.; Miyata, H.; Fujii, S.; Arimoto, K. A Edge Master Computing for Pineapple Monitoring System with Drone and Data-management. In Proceedings of the 2020 9th International Congress on Advanced Applied Informatics (IIAI-AAI), Kitakyushu, Japan, 1–15 September 2020; pp. 404–407. [Google Scholar]
- Der Yang, M.; Tseng, H.H.; Hsu, Y.C.; Tseng, W.C. Real-time crop classification using edge computing and deep learning. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Virtual, 10–13 January 2020; pp. 1–4. [Google Scholar]
- Liénard, J.; Vogs, A.; Gatziolis, D.; Strigul, N. Embedded, real-time UAV control for improved, image-based 3D scene reconstruction. Measurement 2016, 81, 264–269. [Google Scholar] [CrossRef]
- Salamí, E.; Gallardo, A.; Skorobogatov, G.; Barrado, C. On-the-fly olive tree counting using a UAS and cloud services. Remote Sens. 2019, 11, 316. [Google Scholar] [CrossRef]
- Blekos, K.; Nousias, S.; Lalos, A.S. Efficient automated U-Net based tree crown delineation using UAV multi-spectral imagery on embedded devices. In Proceedings of the 2020 IEEE 18th International Conference on Industrial Informatics (INDIN), Virtual, 20–23 July 2020; Volume 1, pp. 541–546. [Google Scholar]
- Qin, Z.; Wang, W.; Dammer, K.H.; Guo, L.; Cao, Z. Ag-YOLO: A real-time low-cost detector for precise spraying with case study of palms. Frontiers in Plant Science 2021, 12, 753603. [Google Scholar] [CrossRef] [PubMed]
- Han, P.; Ma, C.; Chen, J.; Chen, L.; Bu, S.; Xu, S.; Zhao, Y.; Zhang, C.; Hagino, T. Fast tree detection and counting on UAVs for sequential aerial images with generating orthophoto mosaicing. Remote Sens. 2022, 14, 4113. [Google Scholar] [CrossRef]
- Chen, P.Y.; Hsieh, J.W.; Gochoo, M.; Chang, M.C.; Wang, C.Y.; Chen, Y.S.; Liao, H.Y.M. Drone-Based Vehicle Flow Estimation and its Application to Traffic Conflict Hotspot Detection at Intersections. In Proceedings of the 2020 IEEE International Conference on Image Processing (ICIP), Virtual, 25–28 October 2020; pp. 1521–1525. [Google Scholar]
- Balamuralidhar, N.; Tilon, S.; Nex, F. MultEYE: Monitoring system for real-time vehicle detection, tracking and speed estimation from UAV imagery on edge-computing platforms. Remote Sens. 2021, 13, 573. [Google Scholar] [CrossRef]
- Montanari, R.; Tozadore, D.C.; Fraccaroli, E.S.; Romero, R.A. Ground vehicle detection and classification by an unmanned aerial vehicle. In Proceedings of the 2015 12th Latin American Robotics Symposium and 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlândia, Brazil, 8–11 October 2015; pp. 253–258. [Google Scholar]
- Tilon, S.; Nex, F.; Vosselman, G.; Sevilla de la Llave, I.; Kerle, N. Towards Improved Unmanned Aerial Vehicle Edge Intelligence: A Road Infrastructure Monitoring Case Study. Remote Sens. 2022, 14, 4008. [Google Scholar] [CrossRef]
- Rilanto Trilaksono, B.; Triadhitama, R.; Adiprawita, W.; Wibowo, A.; Sreenatha, A. Hardware-in-the-loop simulation for visual target tracking of octorotor UAV. Aircr. Eng. Aerosp. Technol. 2011, 83, 407–419. [Google Scholar] [CrossRef]
- Kyrkou, C.; Plastiras, G.; Theocharides, T.; Venieris, S.I.; Bouganis, C.S. DroNet: Efficient convolutional neural network detector for real-time UAV applications. In Proceedings of the 2018 Design, Automation & Test in Europe Conference & Exhibition (DATE), Dresden, Germany, 9–13 March 2018; pp. 967–972. [Google Scholar]
- Bian, J.; Hui, X.; Zhao, X.; Tan, M. A monocular vision–based perception approach for unmanned aerial vehicle close proximity transmission tower inspection. Int. J. Adv. Robot. Syst. 2019, 16, 1729881418820227. [Google Scholar] [CrossRef]
- Carletti, V.; Greco, A.; Saggese, A.; Vento, M. An intelligent flying system for automatic detection of faults in photovoltaic plants. J. Ambient Intell. Humaniz. Comput. 2020, 11, 2027–2040. [Google Scholar] [CrossRef]
- Siddiqui, Z.A.; Park, U. A drone based transmission line components inspection system with deep learning technique. Energies 2020, 13, 3348. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Q.; Chu, L.; Zhou, Y.; Xu, C. Real-time detection and spatial localization of insulators for UAV inspection based on binocular stereo vision. Remote Sens. 2021, 13, 230. [Google Scholar] [CrossRef]
- Sarkar, D.; Gunturi, S.K. Online health status monitoring of high voltage insulators using deep learning model. The Visual Computer 2021, 38, 4457–4468. [Google Scholar] [CrossRef]
- Deng, F.; Xie, Z.; Mao, W.; Li, B.; Shan, Y.; Wei, B.; Zeng, H. Research on edge intelligent recognition method oriented to transmission line insulator fault detection. Int. J. Electr. Power Energy Syst. 2022, 139, 108054. [Google Scholar] [CrossRef]
- Kumar, P.; Batchu, S.; Kota, S.R. Real-time concrete damage detection using deep learning for high rise structures. IEEE Access 2021, 9, 112312–112331. [Google Scholar] [CrossRef]
- Jiang, S.; Cheng, Y.; Zhang, J. Vision-guided unmanned aerial system for rapid multiple-type damage detection and localization. Struct. Health Monit. 2023, 22, 319–337. [Google Scholar] [CrossRef]
- Yavariabdi, A.; Kusetogullari, H.; Cicek, H. UAV detection in airborne optic videos using dilated convolutions. J. Opt. 2021, 50, 569–582. [Google Scholar] [CrossRef]
- Kaputa, D.S.; Landy, B.P. YOLBO: You Only Look Back Once–A Low Latency Object Tracker Based on YOLO and Optical Flow. IEEE Access 2021, 9, 82497–82507. [Google Scholar] [CrossRef]
- Kyristsis, S.; Antonopoulos, A.; Chanialakis, T.; Stefanakis, E.; Linardos, C.; Tripolitsiotis, A.; Partsinevelos, P. Towards autonomous modular UAV missions: The detection, geo-location and landing paradigm. Sensors 2016, 16, 1844. [Google Scholar] [CrossRef]
- Son, H.S.; Kim, D.K.; Yang, S.H.; Choi, Y.K. Real-time power line detection for safe flight of agricultural spraying drones using embedded systems and deep learning. IEEE Access 2022, 10, 54947–54956. [Google Scholar] [CrossRef]
- Zhou, P.; Liu, G.; Wang, J.; Weng, Q.; Zhang, K.; Zhou, Z. Lightweight unmanned aerial vehicle video object detection based on spatial-temporal correlation. Int. J. Commun. Syst. 2022, 35, e5334. [Google Scholar] [CrossRef]
- Balsi, M.; Moroni, M.; Chiarabini, V.; Tanda, G. High-resolution aerial detection of marine plastic litter by hyperspectral sensing. Remote Sens. 2021, 13, 1557. [Google Scholar] [CrossRef]
- Luo, W.; Han, W.; Fu, P.; Wang, H.; Zhao, Y.; Liu, K.; Liu, Y.; Zhao, Z.; Zhu, M.; Xu, R.; et al. A water surface contaminants monitoring method based on airborne depth reasoning. Processes 2022, 10, 131. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Zhang, X.; Han, L.; Dong, Y.; Shi, Y.; Huang, W.; Han, L.; González-Moreno, P.; Ma, H.; Ye, H.; Sobeih, T. A deep learning-based approach for automated yellow rust disease detection from high-resolution hyperspectral UAV images. Remote Sens. 2019, 11, 1554. [Google Scholar] [CrossRef]
- Kerkech, M.; Hafiane, A.; Canals, R. Vine disease detection in UAV multispectral images using optimized image registration and deep learning segmentation approach. Comput. Electron. Agric. 2020, 174, 105446. [Google Scholar] [CrossRef]
- Udin, W.; Norazami, N.; Sulaiman, N.; Zaudin, N.C.; Ma’ail, S.; Nor, A.M. UAV based multi-spectral imaging system for mapping landslide risk area along Jeli-Gerik highway, Jeli, Kelantan. In Proceedings of the 2019 IEEE 15th International Colloquium on Signal Processing & Its Applications (CSPA), Penang, Malaysia, 29–30 March 2019; pp. 162–167. [Google Scholar]
- Hota, M.; Kumar, U. Power Lines Detection and Segmentation In Multi-Spectral Uav Images Using Convolutional Neural Network. In Proceedings of the 2020 IEEE India Geoscience and Remote Sensing Symposium (InGARSS), Virtual, 1–4 December 2020; pp. 154–157. [Google Scholar]
- Khan, W.Z.; Ahmed, E.; Hakak, S.; Yaqoob, I.; Ahmed, A. Edge computing: A survey. Future Gener. Comput. Syst. 2019, 97, 219–235. [Google Scholar] [CrossRef]
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge Computing: Vision and Challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Hu, Y.C.; Patel, M.; Sabella, D.; Sprecher, N.; Young, V. Mobile edge computing—A key technology towards 5G. ETSI White Pap. 2015, 11, 1–16. [Google Scholar]
- Upadhyay, J.; Rawat, A.; Deb, D. UAV-Based Target Localization in Dense Areas with Computer Vision and GPS Hybrid Navigation Model. In Proceedings of the 2021 IEEE International India Geoscience and Remote Sensing Symposium (InGARSS), Virtual, 6–10 December 2021; pp. 417–420. [Google Scholar]
- Avola, D.; Cinque, L.; Di Mambro, A.; Diko, A.; Fagioli, A.; Foresti, G.L.; Marini, M.R.; Mecca, A.; Pannone, D. Low-altitude aerial video surveillance via one-class SVM anomaly detection from textural features in UAV images. Information 2021, 13, 2. [Google Scholar] [CrossRef]
- Mittal, P.; Singh, R.; Sharma, A. Deep learning-based object detection in low-altitude UAV datasets: A survey. Image Vis. Comput. 2020, 104, 104046. [Google Scholar] [CrossRef]
- Gao, P.; Lee, K.; Kuswidiyanto, L.W.; Yu, S.H.; Hu, K.; Liang, G.; Chen, Y.; Wang, W.; Liao, F.; Jeong, Y.S.; et al. Dynamic Beehive Detection and Tracking System Based on YOLO V5 and Unmanned Aerial Vehicle. J. Biosyst. Eng. 2022, 47, 510–520. [Google Scholar] [CrossRef]
- Hassler, S.C.; Baysal-Gurel, F. Unmanned aircraft system (UAS) technology and applications in agriculture. Agronomy 2019, 9, 618. [Google Scholar] [CrossRef]
- Freitas, S.; Silva, H.; Almeida, J.; Silva, E. Hyperspectral imaging for real-time unmanned aerial vehicle maritime target detection. J. Intell. Robot. Syst. 2018, 90, 551–570. [Google Scholar] [CrossRef]
- Zhong, Y.; Hu, X.; Luo, C.; Wang, X.; Zhao, J.; Zhang, L. WHU-Hi: UAV-borne hyperspectral with high spatial resolution (H2) benchmark datasets and classifier for precise crop identification based on deep convolutional neural network with CRF. Remote Sens. Environ. 2020, 250, 112012. [Google Scholar] [CrossRef]
- Melián, J.M.; Jiménez, A.; Díaz, M.; Morales, A.; Horstrand, P.; Guerra, R.; López, S.; López, J.F. Real-time hyperspectral data transmission for UAV-based acquisition platforms. Remote Sens. 2021, 13, 850. [Google Scholar] [CrossRef]
- Hsu, C.C.; Lin, C.H.; Kao, C.H.; Lin, Y.C. DCSN: Deep compressed sensing network for efficient hyperspectral data transmission of miniaturized satellite. IEEE Trans. Geosci. Remote Sens. 2020, 59, 7773–7789. [Google Scholar] [CrossRef]
- Dua, Y.; Kumar, V.; Singh, R.S. Comprehensive review of hyperspectral image compression algorithms. Opt. Eng. 2020, 59, 090902. [Google Scholar] [CrossRef]
- Melián, J.; Díaz, M.; Morales, A.; Guerra, R.; López, S.; López, J.F. A Novel Data Reutilization Strategy for Real-Time Hyperspectral Image Compression. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Raúl, G.; Yubal, B.; María, D.; Lucana, S.; Sebastián, L.; Roberto, S. A New Algorithm for the On-Board Compression of Hyperspectral Images. Remote Sens. 2018, 10, 428. [Google Scholar]
- Hussain, A.J.; Al-Fayadh, A.; Radi, N. Image compression techniques: A survey in lossless and lossy algorithms. Neurocomputing 2018, 300, 44–69. [Google Scholar] [CrossRef]
- Reid, M.; Millar, R.J.; Black, N.D. Second-generation image coding: An overview. ACM Comput. Surv. CSUR 1997, 29, 3–29. [Google Scholar] [CrossRef]
- Hupel, T.; Stütz, P. Adopting Hyperspectral Anomaly Detection for Near Real-Time Camouflage Detection in Multispectral Imagery. Remote Sens. 2022, 14, 3755. [Google Scholar] [CrossRef]
- Umar, M.; Ferzund, J.; Sajjad, T.; Owais, S.M. Dealing Issues of Mobile Cloud Computing using 5G Technology. Int. J. Comput. Sci. Netw. Secur. 2017, 17, 246–250. [Google Scholar]
- Ishtiaq, M.; Saeed, N.; Khan, M.A. Edge computing in IOT: A 6g perspective. arXiv 2021, arXiv:2111.08943. [Google Scholar]
- Chen, J.; Ran, X. Deep learning with edge computing: A review. Proc. IEEE 2019, 107, 1655–1674. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- Yang, J.; Chen, J.; Yang, Z. Energy-efficient UAV communication with trajectory optimization. In Proceedings of the 2021 2nd International Conference on Big Data & Artificial Intelligence & Software Engineering (ICBASE)), Zhuhai, China, 24–26 September 2021; pp. 508–514. [Google Scholar]
- Jiang, X.; Sheng, M.; Nan, Z.; Chengwen, X.; Weidang, L.; Xianbin, W. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2022, 35, 19–34. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, J. Mobile Edge Computing, Metaverse, 6G Wireless Communications, Artificial Intelligence, and Blockchain: Survey and Their Convergence. arXiv 2022, arXiv:2209.14147. [Google Scholar]
- Huda, S.A.; Moh, S. Survey on computation offloading in UAV-Enabled mobile edge computing. J. Netw. Comput. Appl. 2022, 201, 103341. [Google Scholar] [CrossRef]
- Sacco, A.; Esposito, F.; Marchetto, G. Resource Inference for Sustainable and Responsive Task Offloading in Challenged Edge Networks. IEEE Trans. Green Commun. Netw. 2021, 5, 1114–1127. [Google Scholar] [CrossRef]
- Gale, T.; Elsen, E.; Hooker, S. The State of Sparsity in Deep Neural Networks. arXiv 2019, arXiv:1902.09574. [Google Scholar]
- Augasta, M.; Kathirvalavakumar, T. Pruning algorithms of neural networks—A comparative study. Open Comput. Sci. 2013, 3, 105–115. [Google Scholar] [CrossRef]
- Blalock, D.; Gonzalez Ortiz, J.J.; Frankle, J.; Guttag, J. What is the state of neural network pruning? Proc. Mach. Learn. Syst. 2020, 2, 129–146. [Google Scholar]
- Liang, T.; Glossner, J.; Wang, L.; Shi, S.; Zhang, X. Pruning and quantization for deep neural network acceleration: A survey. Neurocomputing 2021, 461, 370–403. [Google Scholar] [CrossRef]
- Cai, H.; Gan, C.; Wang, T.; Zhang, Z.; Han, S. Once-for-all: Train one network and specialize it for efficient deployment. arXiv 2019, arXiv:1908.09791. [Google Scholar]
- Xu, C.; Li, Q.; Zhou, Q.; Zhang, S.; Yu, D.; Ma, Y. Power Line-Guided Automatic Electric Transmission Line Inspection System. IEEE Trans. Instrum. Meas. 2022, 71, 1–18. [Google Scholar] [CrossRef]
- Zhou, Y.; Xu, C.; Dai, Y.; Feng, X.; Ma, Y.; Li, Q. Dual-view stereovision-guided automatic inspection system for overhead transmission line corridor. Remote Sens. 2022, 14, 4095. [Google Scholar] [CrossRef]
- Latif, G.; Alghazo, J.; Maheswar, R.; Vijayakumar, V.; Butt, M. Deep learning based intelligence cognitive vision drone for automatic plant diseases identification and spraying. J. Intell. Fuzzy Syst. 2020, 39, 8103–8114. [Google Scholar] [CrossRef]
- Deng, T.; Xu, X.; Ding, Z.; Xiao, X.; Zhu, M.; Peng, K. Automatic collaborative water surface coverage and cleaning strategy of UAV and USVs. Digit. Commun. Netw. 2022, in press. [Google Scholar] [CrossRef]
- Mammarella, M.; Comba, L.; Biglia, A.; Dabbene, F.; Gay, P. Cooperation of unmanned systems for agricultural applications: A case study in a vineyard. Biosyst. Eng. 2022, 223, 81–102. [Google Scholar] [CrossRef]
- Li, L.; Cheng, L.; Li, X.; Yue, L.; Zhang, H. Research on Multi Machine Cooperative Autonomous Inspection Strategy for UHV Dense Transmission Channel Based on 5G Technology. J. Sensors 2022, 2022, 8524817. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of unmanned aerial vehicle swarm communication architectures and routing protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Chao, K.; Tao, L.; Li, M.; Guoyu, J.; yuchao, W.; Yu, Z. Construction and Application Research of Knowledge Graph in Spacecraft Launch. J. Phys. Conf. Ser. 2021, 1754, 012180. [Google Scholar] [CrossRef]
- De Curtò, J.; de Zarzà, I.; Calafate, C.T. Semantic scene understanding with large language models on unmanned aerial vehicles. Drones 2023, 7, 114. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Peltonen, E.; Bennis, M.; Capobianco, M.; Debbah, M.; Ding, A.; Gil-Castiñeira, F.; Jurmu, M.; Karvonen, T.; Kelanti, M.; Kliks, A. 6G white paper on edge intelligence. arXiv 2020, arXiv:2004.14850. [Google Scholar]
- Tomkos, I.; Klonidis, D.; Pikasis, E.; Theodoridis, S. Toward the 6G network era: Opportunities and challenges. IT Prof. 2020, 22, 34–38. [Google Scholar] [CrossRef]
- Chen, X.; Sheng, M.; Li, B.; Zhao, N. Survey on unmanned aerial vehicle communications for 6G. J. Electron. Inf. Technol. 2022, 44, 781–789. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspect | Terms |
|---|---|
| Platform | UAV, UAS, RPAS, drone, unmanned aerial vehicle, remotely piloted aircraft |
| Task | real-time detection, real-time identification, real-time monitoring, real-time segmentation, real-time classification |
| Processing method | cloud computing, edge computing, edge intelligence, embedded |
| Database | Search string |
|---|---|
| Web of Science | ((TS=(UAV OR UAS OR RPAS OR drone OR “unmanned aerial vehicle” OR “remotely piloted aircraft”)) AND TS=(real-time detect* OR real-time identif* OR real-time segment* OR real-time classif* OR real-time monitor*)) AND TS=(cloud-computing OR edge-computing OR edge-intelligen* OR embedded) |
| Scopus | TITLE-ABS-KEY(UAV OR UAS OR RPAS OR drone OR “unmanned aerial vehicle” OR “remotely piloted aircraft”) AND TITLE-ABS-KEY(real-time detect* OR real-time identif* OR real-time segment* OR real-time classif* OR real-time monitor*) AND TITLE-ABS-KEY(cloud-computing OR edge-computing OR edge-intelligen* OR embedded) |
| ID | Criterion |
|---|---|
| EC1 | Papers in which the full text was unavailable |
| EC2 | Papers that were not in English |
| EC3 | Review paper/conference series/book chapter |
| EC4 | Papers that did not relate to the proposed study |
| EC5 | Papers that did not conduct real-time detection |
| EC6 | Papers that did not aim for UAV RS detection |
| EC7 | Papers that only conducted simulations on a high-performance computer |
| EC8 | Papers that only provided a general description without specific methods on real-time detection based on UAVs |
| Computing Component | GPU-Based | ||
|---|---|---|---|
| Model | NVIDIA Jetson Nano | NVIDIA Jetson TX2 | NVIDIA Jetson Xavier NX |
| Physical Figure |  |  |  |
| CPU | ++ | ++ | +++ |
| GPU | + | ++ | +++ |
| Memory | + | + | ++ |
| Power | ++ | + | +++ |
| AI Performance | + | ++ | +++ |
| Price | ++ | +++ | ++++ |
| Application | Weed detection [67], Disease detection [63] | Powerline detection [88], Disease detection [61] | Vehicle detection [78], Tree detection [76] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Z.; Kooistra, L.; Wang, W.; Guo, L.; Valente, J. Real-Time Object Detection Based on UAV Remote Sensing: A Systematic Literature Review. Drones 2023, 7, 620. https://doi.org/10.3390/drones7100620
Cao Z, Kooistra L, Wang W, Guo L, Valente J. Real-Time Object Detection Based on UAV Remote Sensing: A Systematic Literature Review. Drones. 2023; 7(10):620. https://doi.org/10.3390/drones7100620
Chicago/Turabian StyleCao, Zhen, Lammert Kooistra, Wensheng Wang, Leifeng Guo, and João Valente. 2023. "Real-Time Object Detection Based on UAV Remote Sensing: A Systematic Literature Review" Drones 7, no. 10: 620. https://doi.org/10.3390/drones7100620
APA StyleCao, Z., Kooistra, L., Wang, W., Guo, L., & Valente, J. (2023). Real-Time Object Detection Based on UAV Remote Sensing: A Systematic Literature Review. Drones, 7(10), 620. https://doi.org/10.3390/drones7100620