
Adaptive Robust Control for Quadrotors with Unknown Time-Varying Delays and Uncertainties in Dynamics



Abstract
:1. Introduction
Notations and Prelimineries
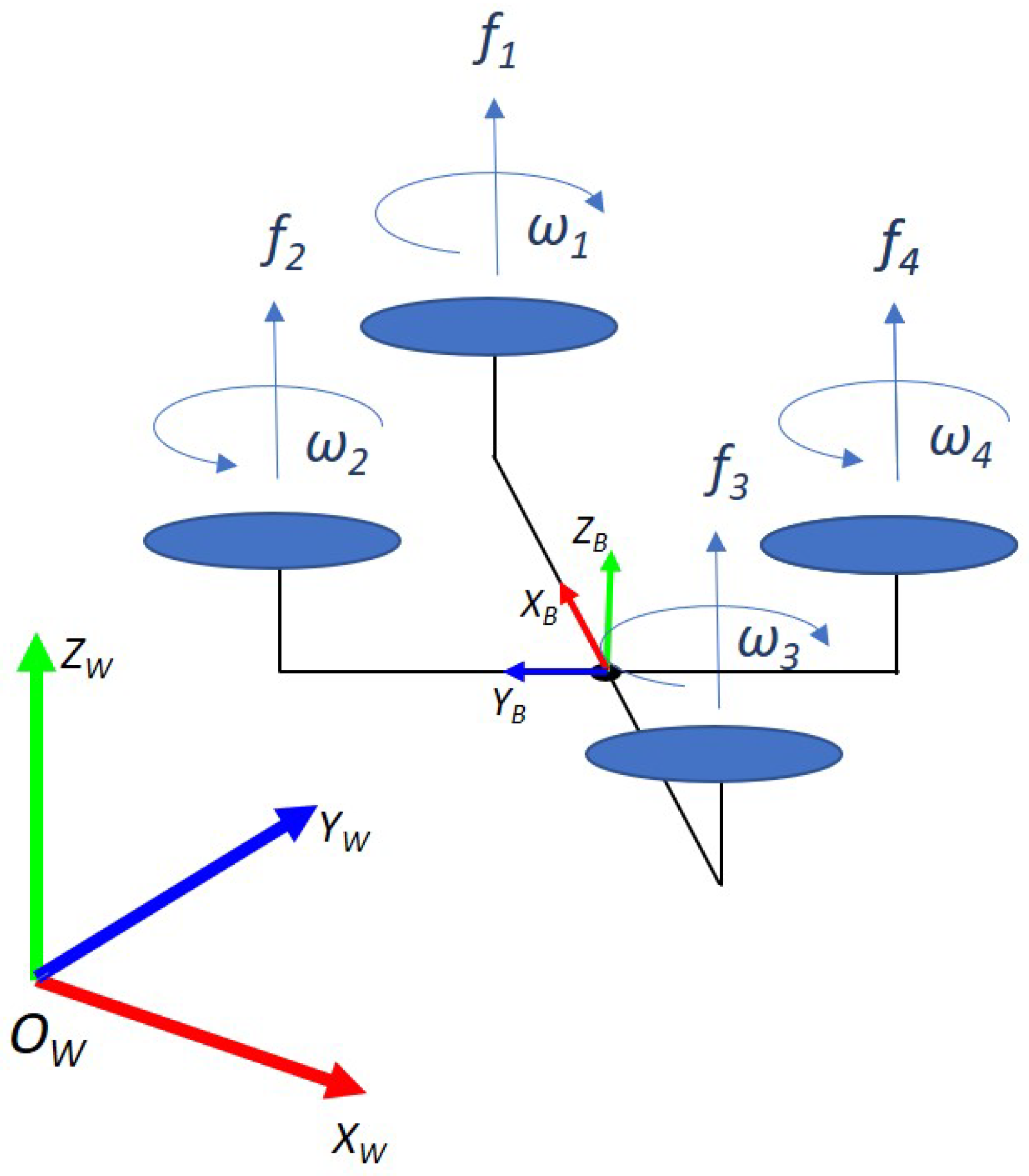
2. Quadrotor Dynamics
3. Controller Design
3.1. Position Control
3.2. Attitude Control
4. Simulation Results
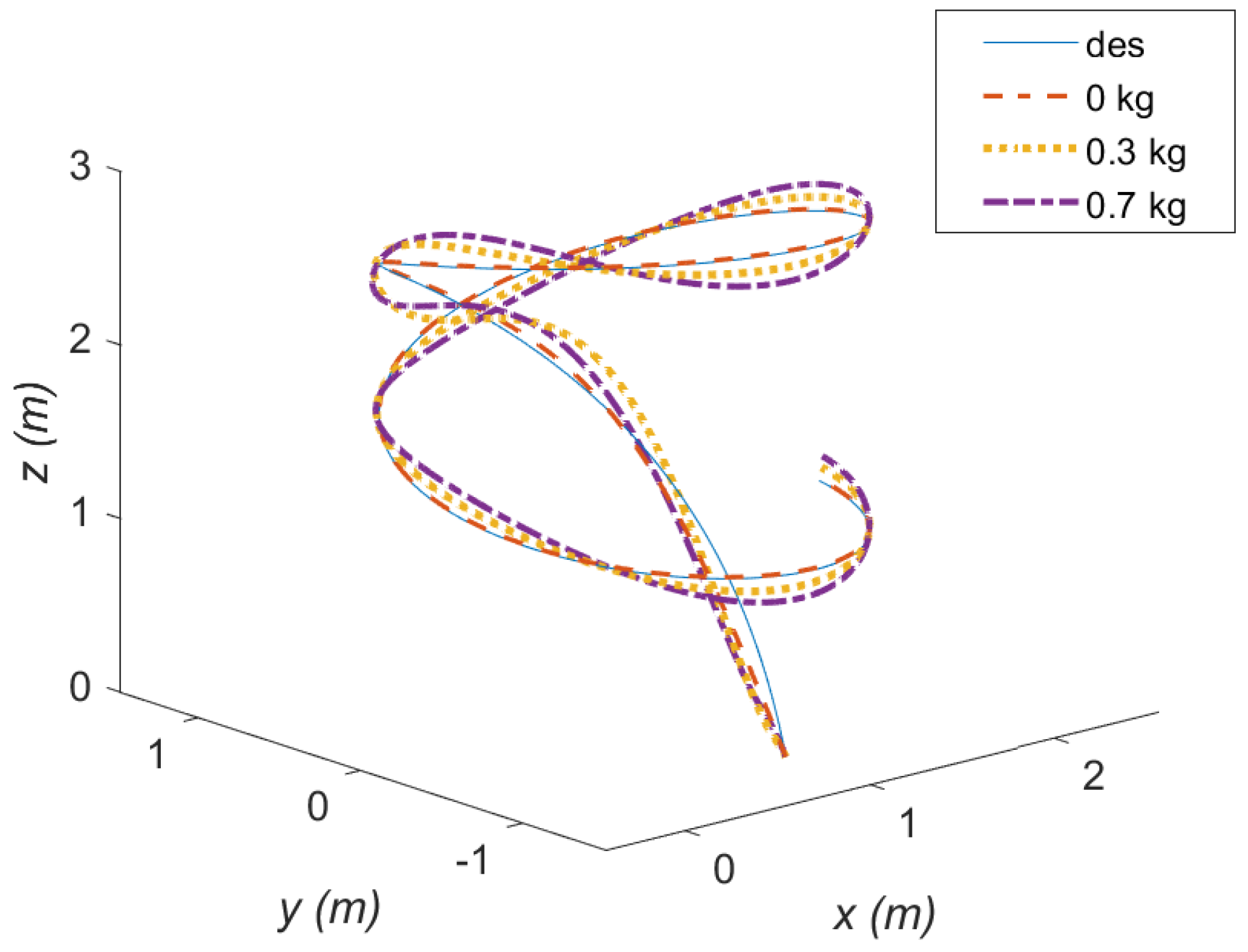
4.1. Robustness to Modelling Uncertainties
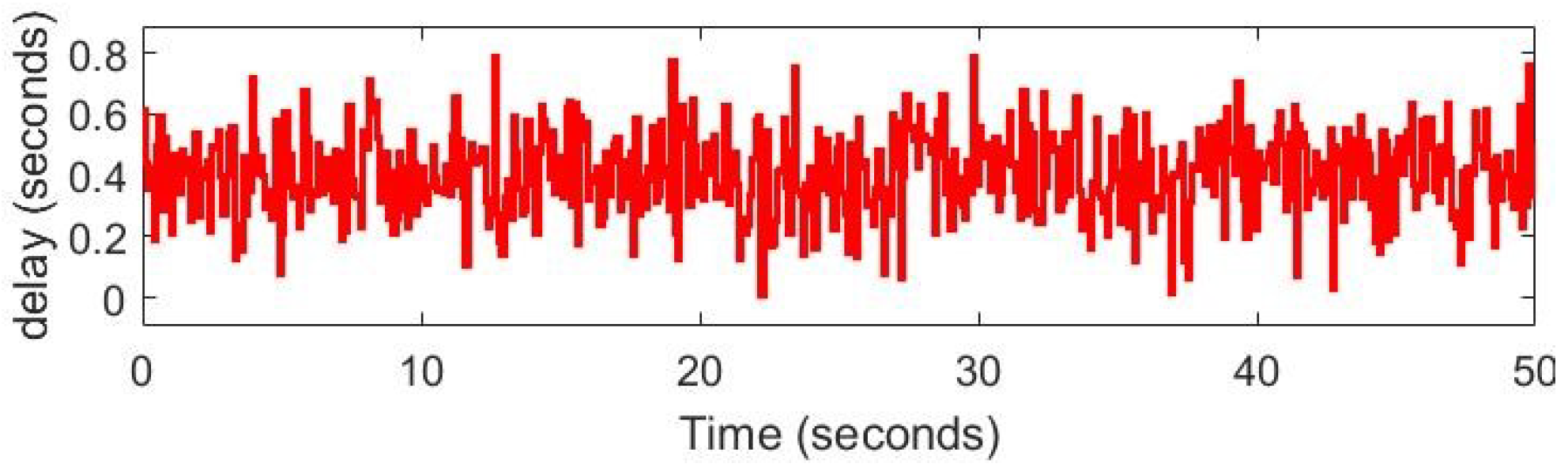
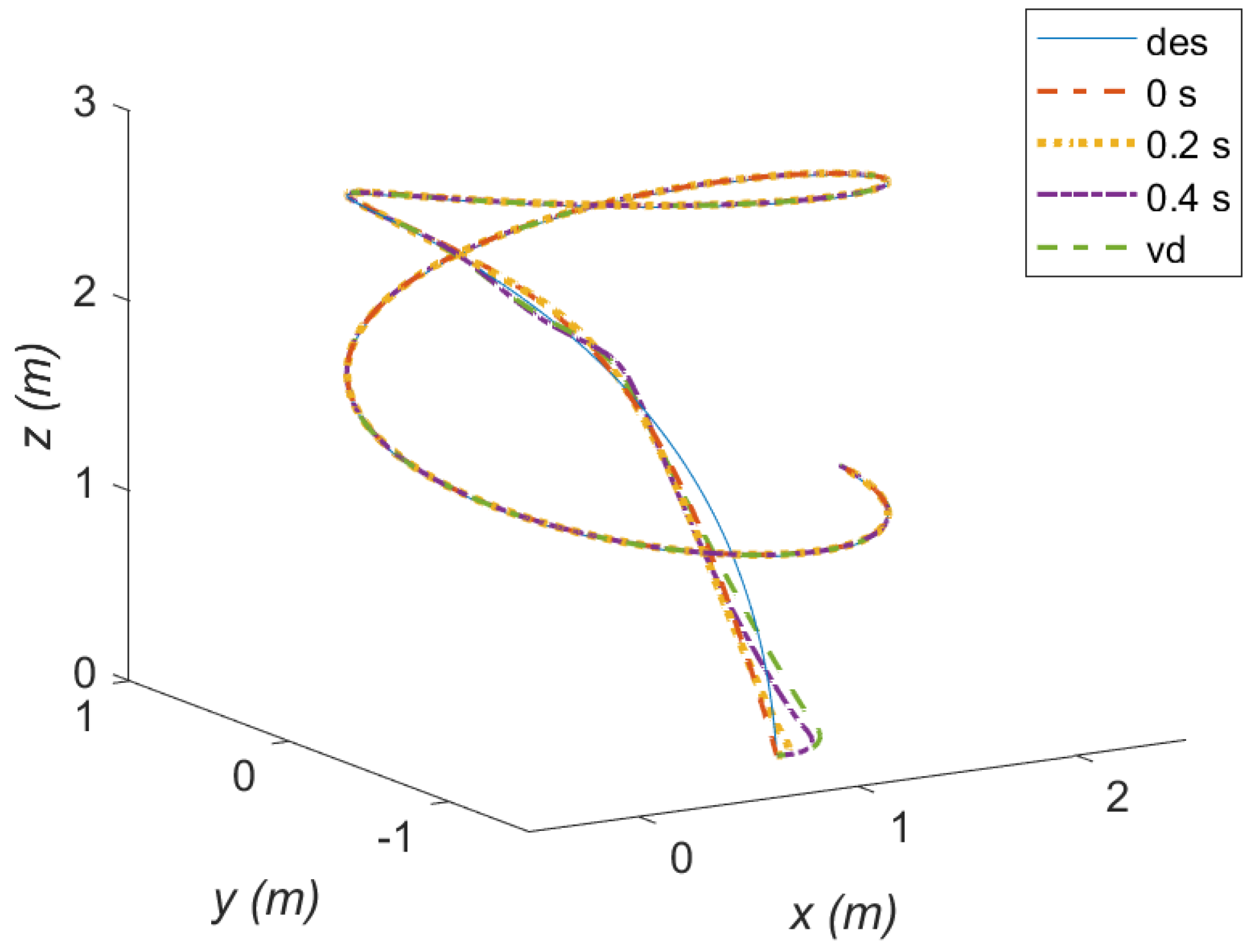
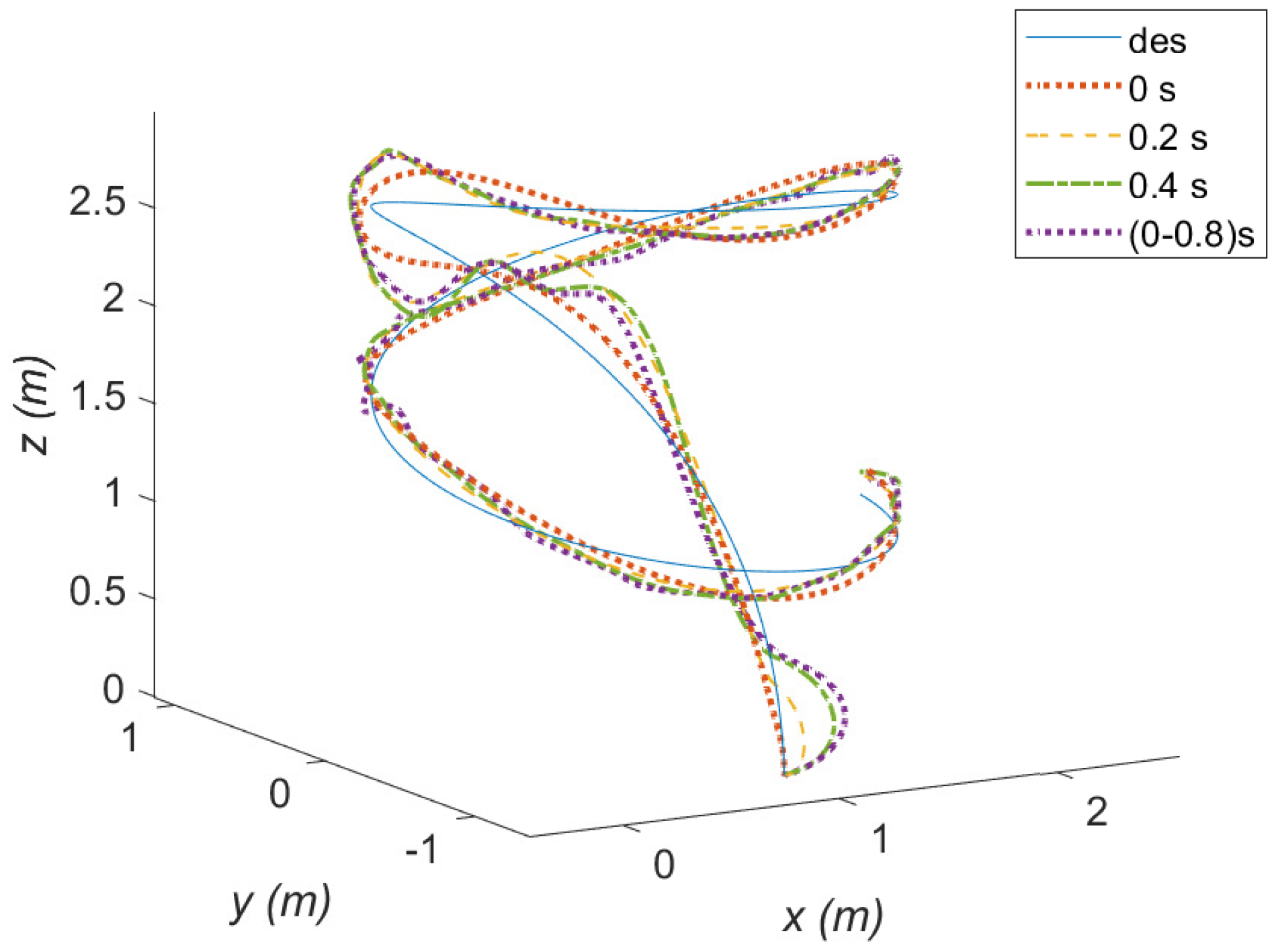
4.2. Robustness to Closed-Loop Time-Delays
4.3. Robustness to Closed-Loop Time-Delays with Modelling Uncertainties
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Stability Analysis
References
- Gupte, S.; Mohandas, P.I.T.; Conrad, J.M. A survey of quadrotor Unmanned Aerial Vehicles. In Proceedings of the 2012 Proceedings of IEEE Southeastcon, Orlando, FL, USA, 15–18 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Luque-Vega, L.F.; Castillo-Toledo, B.; Loukianov, A.; Gonzalez-Jimenez, L.E. Power line inspection via an unmanned aerial system based on the quadrotor helicopter. In Proceedings of the MELECON 2014–2014 17th IEEE Mediterranean Electrotechnical Conference, Beirut, Lebanon, 13–16 April 2014; pp. 393–397. [Google Scholar] [CrossRef]
- Zheng, D.; Wang, H.; Wang, J.; Chen, S.; Chen, W.; Liang, X. Image-Based Visual Servoing of a Quadrotor Using Virtual Camera Approach. IEEE/ASME Trans. Mechatronics 2017, 22, 972–982. [Google Scholar] [CrossRef]
- Ma’sum, M.A.; Arrofi, M.K.; Jati, G.; Arifin, F.; Kurniawan, M.N.; Mursanto, P.; Jatmiko, W. Simulation of intelligent Unmanned Aerial Vehicle (UAV) For military surveillance. In Proceedings of the 2013 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Sanur Bali, Indonesia, 28–29 September 2013; pp. 161–166. [Google Scholar] [CrossRef]
- Gassner, M.; Cieslewski, T.; Scaramuzza, D. Dynamic collaboration without communication: Vision-based cable-suspended load transport with two quadrotors. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5196–5202. [Google Scholar] [CrossRef]
- Yüksel, B.; Secchi, C.; Bülthoff, H.H.; Franchi, A. A nonlinear force observer for quadrotors and application to physical interactive tasks. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 433–440. [Google Scholar] [CrossRef]
- Agha, A.; Otsu, K.; Morrell, B.; Fan, D.D.; Thakker, R.; Santamaria-Navarro, A.; Kim, S.K.; Bouman, A.; Lei, X.; Edlund, J.; et al. Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challenge. arXiv 2021, arXiv:2103.11470. [Google Scholar]
- Elmokadem, T.; Savkin, A.V. A method for autonomous collision-free navigation of a quadrotor UAV in unknown tunnel-like environments. Robotica 2022, 40, 835–861. [Google Scholar] [CrossRef]
- Seisa, A.S.; Satpute, S.G.; Lindqvist, B.; Nikolakopoulos, G. An Edge-Based Architecture for Offloading Model Predictive Control for UAVs. Robotics 2022, 11, 80. [Google Scholar] [CrossRef]
- Choutri, K.; Lagha, M.; Dala, L. Multi-layered optimal navigation system for quadrotor UAV. Aircr. Eng. Aerosp. Technol. 2019, 92, 145–155. [Google Scholar] [CrossRef]
- Fu, C.; Sarabakha, A.; Kayacan, E.; Wagner, C.; John, R.; Garibaldi, J.M. Input uncertainty sensitivity enhanced nonsingleton fuzzy logic controllers for long-term navigation of quadrotor UAVs. IEEE/ASME Trans. Mechatronics 2018, 23, 725–734. [Google Scholar] [CrossRef]
- Sanchez, A.; Parra-Vega, V.; Tang, C.; Oliva-Palomo, F.; Izaguirre-Espinosa, C. Continuous reactive-based position-attitude control of quadrotors. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 4643–4648. [Google Scholar]
- Derafa, L.; Benallegue, A.; Fridman, L. Super twisting control algorithm for the attitude tracking of a four rotors UAV. J. Frankl. Inst. 2012, 349, 685–699. [Google Scholar] [CrossRef]
- Ganguly, S.; Sankaranarayanan, V.N.; Suraj, B.; Yadav, R.D.; Roy, S. Efficient Manoeuvring of Quadrotor under Constrained Space and Predefined Accuracy. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 6352–6357. [Google Scholar]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model predictive control scheme for the autonomous flight of an unmanned quadrotor. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 2243–2248. [Google Scholar]
- Tran, T.T.; Ge, S.S.; He, W. Adaptive control of a quadrotor aerial vehicle with input constraints and uncertain parameters. Int. J. Control 2018, 91, 1140–1160. [Google Scholar] [CrossRef]
- Tian, B.; Cui, J.; Lu, H.; Zuo, Z.; Zong, Q. Adaptive finite-time attitude tracking of quadrotors with experiments and comparisons. IEEE Trans. Ind. Electron. 2019, 66, 9428–9438. [Google Scholar] [CrossRef]
- Yang, S.; Xian, B. Energy-based nonlinear adaptive control design for the quadrotor UAV system with a suspended payload. IEEE Trans. Ind. Electron. 2019, 67, 2054–2064. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Adaptive sliding mode control for finite-time stability of quad-rotor UAVs with parametric uncertainties. ISA Trans. 2018, 72, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Obeid, H.; Fridman, L.M.; Laghrouche, S.; Harmouche, M. Barrier function-based adaptive sliding mode control. Automatica 2018, 93, 540–544. [Google Scholar] [CrossRef]
- Mehmood, Y.; Aslam, J.; Ullah, N.; Chowdhury, M.S.; Techato, K.; Alzaed, A.N. Adaptive robust trajectory tracking control of multiple quad-rotor UAVs with parametric uncertainties and disturbances. Sensors 2021, 21, 2401. [Google Scholar] [CrossRef] [PubMed]
- Anderson, R.B.; Marshall, J.A.; L’Afflitto, A. Constrained robust model reference adaptive control of a tilt-rotor quadcopter pulling an unmodeled cart. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 39–54. [Google Scholar] [CrossRef]
- Sankaranarayanan, V.N.; Roy, S.; Baldi, S. Aerial transportation of unknown payloads: Adaptive path tracking for quadrotors. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 7710–7715. [Google Scholar]
- Sankaranarayanan, V.N.; Roy, S. Introducing switched adaptive control for quadrotors for vertical operations. Optim. Control Appl. Methods 2020, 41, 1875–1888. [Google Scholar] [CrossRef]
- Idrissi, M.; Salami, M.; Annaz, F. A Review of Quadrotor Unmanned Aerial Vehicles: Applications, Architectural Design and Control Algorithms. J. Intell. Robot. Syst. 2022, 104, 1–33. [Google Scholar] [CrossRef]
- Fridman, E. Tutorial on Lyapunov-based methods for time-delay systems. Eur. J. Control 2014, 20, 271–283. [Google Scholar] [CrossRef]
- Gu, K.; Chen, J.; Kharitonov, V.L. Stability of Time-Delay Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Hespanha, J.P.; Naghshtabrizi, P.; Xu, Y. A survey of recent results in networked control systems. Proc. IEEE 2007, 95, 138–162. [Google Scholar] [CrossRef]
- Richard, J.P. Time-delay systems: An overview of some recent advances and open problems. Automatica 2003, 39, 1667–1694. [Google Scholar] [CrossRef]
- Kolmanovskii, V.B.; Niculescu, S.I.; Gu, K. Delay effects on stability: A survey. In Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No. 99CH36304), Phoenix, AZ, USA, 7–10 December 1999; Volume 2, pp. 1993–1998. [Google Scholar]
- Gu, K.; Niculescu, S.I. Survey on recent results in the stability and control of time-delay systems. J. Dyn. Syst. Meas. Control 2003, 125, 158–165. [Google Scholar] [CrossRef]
- Kharitonov, V.L. Robust stability analysis of time delay systems: A survey. Annu. Rev. Control 1999, 23, 185–196. [Google Scholar] [CrossRef]
- Sun, J.; Chen, J. A survey on Lyapunov-based methods for stability of linear time-delay systems. Front. Comput. Sci. 2017, 11, 555–567. [Google Scholar] [CrossRef]
- Nikolakopoulos, G.; Alexis, K. Switching networked attitude control of an unmanned quadrotor. Int. J. Control Autom. Syst. 2013, 11, 389–397. [Google Scholar] [CrossRef]
- Kanellakis, C.; Nikolakopoulos, G. A robust reconfigurable control scheme against pose estimation induced time delays. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016; pp. 581–586. [Google Scholar]
- Castillo-Zamora, J.J.; Boussaada, I.; Benarab, A.; Escareno, J. Time-delay control of quadrotor unmanned aerial vehicles: A multiplicity-induced-dominancy-based approach. J. Vib. Control 2022, 10775463221082718. [Google Scholar] [CrossRef]
- Yang, H.; Liu, L.; Wang, Y. Observer-based sliding mode control for bilateral teleoperation with time-varying delays. Control Eng. Pract. 2019, 91, 104097. [Google Scholar] [CrossRef]
- Zhai, D.H.; Xia, Y. Adaptive control for teleoperation system with varying time delays and input saturation constraints. IEEE Trans. Ind. Electron. 2016, 63, 6921–6929. [Google Scholar] [CrossRef]
- Nguyen, C.M.; Tan, C.P.; Trinh, H. Sliding mode observer for estimating states and faults of linear time-delay systems with outputs subject to delays. Automatica 2021, 124, 109274. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N. Adaptive robust tracking control of a class of nonlinear systems with input delay. Nonlinear Dyn. 2016, 85, 1127–1139. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002; Volume 3. [Google Scholar]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Nicol, C.; Macnab, C.; Ramirez-Serrano, A. Robust adaptive control of a quadrotor helicopter. Mechatronics 2011, 21, 927–938. [Google Scholar] [CrossRef]
- Dydek, Z.T.; Annaswamy, A.M.; Lavretsky, E. Adaptive control of quadrotor UAVs: A design trade study with flight evaluations. IEEE Trans. Control Syst. Technol. 2012, 21, 1400–1406. [Google Scholar] [CrossRef]
- Ha, C.; Zuo, Z.; Choi, F.B.; Lee, D. Passivity-based adaptive backstepping control of quadrotor-type UAVs. Robot. Auton. Syst. 2014, 62, 1305–1315. [Google Scholar] [CrossRef]
- Lee, T.; Leok, M.; McClamroch, N.H. Geometric tracking control of a quadrotor UAV on SE (3). In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5420–5425. [Google Scholar]
- Beard, R. Quadrotor Dynamics and Control Rev 0.1. 2008. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwinqNf7--D5AhUsqVYBHUs3BYgQFnoECBEQAQ&url=https%3A%2F%2Fscholarsarchive.byu.edu%2Fcgi%2Fviewcontent.cgi%3Farticle%3D2324%26context%3Dfacpub&usg=AOvVaw0C7DonxIUY26xgXPJS0N_t (accessed on 16 August 2022).
- Hale, J.K. Functional differential equations. In Analytic Theory of Differential Equations; Springer: Berlin/Heidelberg, Germany, 1971; pp. 9–22. [Google Scholar]
- Fischer, N.; Kamalapurkar, R.; Fitz-Coy, N.; Dixon, W.E. Lyapunov-based control of an uncertain Euler-Lagrange system with time-varying input delay. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 3919–3924. [Google Scholar]
- Kamalapurkar, R.; Fischer, N.; Obuz, S.; Dixon, W.E. Time-varying input and state delay compensation for uncertain nonlinear systems. IEEE Trans. Autom. Control 2015, 61, 834–839. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Payload Mass (kg) | RMS Position Error (m) | ||
|---|---|---|---|
| x | y | z | |
| 0 | 0.0267 | 0.0388 | 0.0325 |
| 0.3 | 0.0800 | 0.0801 | 0.0606 |
| 0.7 | 0.1278 | 0.1242 | 0.1423 |
| Delay (s) | RMS Position Error (m) | ||
|---|---|---|---|
| x | y | z | |
| 0 | 0.0267 | 0.0388 | 0.0325 |
| 0.2 | 0.0570 | 0.0829 | 0.0844 |
| 0.4 | 0.0732 | 0.1060 | 0.1115 |
| Variable | 0.0701 | 0.1122 | 0.1228 |
| Delay (s) | RMS Position Error (m) | ||
|---|---|---|---|
| x | y | z | |
| 0 | 0.1278 | 0.1242 | 0.1423 |
| 0.2 | 0.1547 | 0.1478 | 0.1857 |
| 0.4 | 0.2007 | 0.1905 | 0.2114 |
| Variable | 0.1999 | 0.1918 | 0.2091 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sankaranarayanan, V.N.; Satpute, S.; Nikolakopoulos, G. Adaptive Robust Control for Quadrotors with Unknown Time-Varying Delays and Uncertainties in Dynamics. Drones 2022, 6, 220. https://doi.org/10.3390/drones6090220
Sankaranarayanan VN, Satpute S, Nikolakopoulos G. Adaptive Robust Control for Quadrotors with Unknown Time-Varying Delays and Uncertainties in Dynamics. Drones. 2022; 6(9):220. https://doi.org/10.3390/drones6090220
Chicago/Turabian StyleSankaranarayanan, Viswa Narayanan, Sumeet Satpute, and George Nikolakopoulos. 2022. "Adaptive Robust Control for Quadrotors with Unknown Time-Varying Delays and Uncertainties in Dynamics" Drones 6, no. 9: 220. https://doi.org/10.3390/drones6090220
APA StyleSankaranarayanan, V. N., Satpute, S., & Nikolakopoulos, G. (2022). Adaptive Robust Control for Quadrotors with Unknown Time-Varying Delays and Uncertainties in Dynamics. Drones, 6(9), 220. https://doi.org/10.3390/drones6090220